sebastian bitzer ([email protected])[email protected] seminar knowledge representation university of...
TRANSCRIPT

Sebastian Bitzer ([email protected])Seminar Knowledge RepresentationUniversity of Osnabrueck10.07.2003
Applications of the Channel Theory
Commonsense Reasoning
Representations
10.07.2003 Applications of Channel Theory 2
Overview
• Repetition
• Commonsense Reasoning / Nonmonotonicity
• (Imperfect) Representations

Repetition

10.07.2003 Repetition 4
Basics
• tokens (particulars, instances): things in the world (in time) - a, b, c
• types (in state spaces: states): α, β, γ, σ
• classification: A, set of tokens (A) is classified in set of types
• if a is of type α we write: a╞A α (with respect to A)
10.07.2003 Repetition 5
Constraints and Infomorphisms
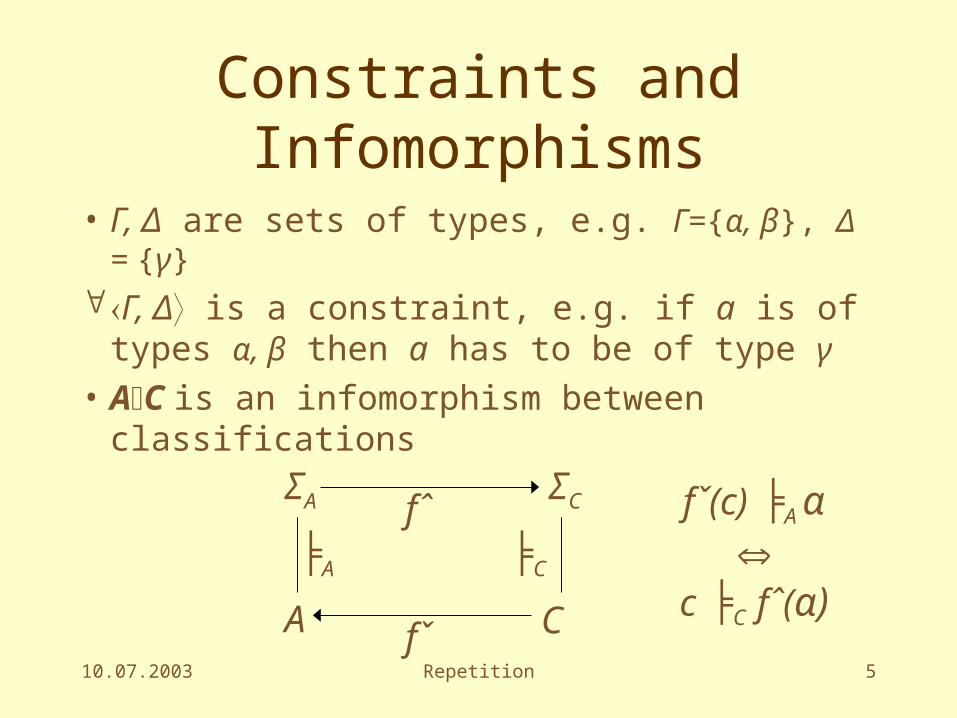
• Γ, Δ are sets of types, e.g. Γ={α, β}, Δ = {γ}Γ, Δ is a constraint, e.g. if a is of types α, β
then a has to be of type γ
• AC is an infomorphism between classifications
A C
ΣA ΣC
╞A ╞C
fˆ
fˇ
fˇ(c) ╞A α
c ╞C fˆ(α)
10.07.2003 Repetition 6
Information Channels and Local Logics
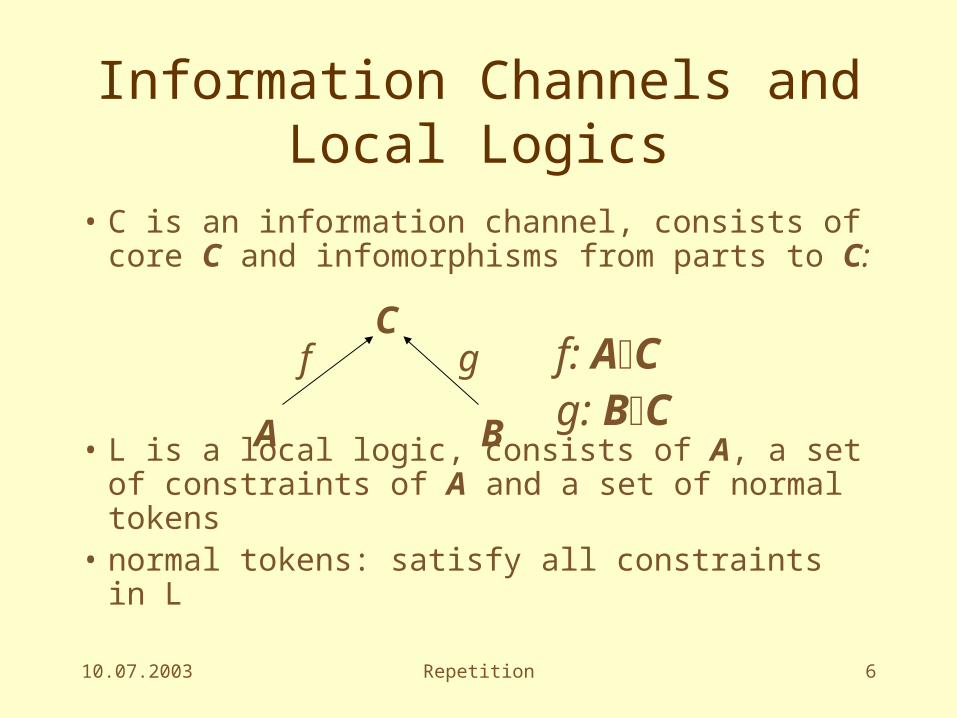
• C is an information channel, consists of core C and infomorphisms from parts to C:
• L is a local logic, consists of A, a set of constraints of A and a set of normal tokens
• normal tokens: satisfy all constraints in L
C
A B
f g f: ACg: BC
10.07.2003 Repetition 7
State Spaces
• S is a state space, consists of a set of tokens (S), a set of states (ΩS) and a function mapping between them: S = S, ΩS, state
• Evt(S) is the according classification
• Log(S) is the local logic on Evt(S)

Commonsense Reasoning
10.07.2003 Commonsense Reasoning 9
Overview
• Problem of Nonmonotonicity
• State Spaces, enhanced
• Background Conditions
• Relativising to a Background Condition

10.07.2003 Commonsense Reasoning 10
The Problem of Nonmonotonicity
Baseball:
(α1) pitcher throws ball to batter
(β) ball will arrive at batter
α1 ├ β
monotonicity:
α1, α2 ├ β
but:
(α2) ball hits bird
α1, α2 ├ ¬β
10.07.2003 Commonsense Reasoning 11
Real valued State Spaces
• S = S, Ω Rn, state• each state is a vector σ with dimension n
• σ has input and output coordinates (σ = σi×σo) = observables
• outputs can be computed from inputs
10.07.2003 Commonsense Reasoning 12
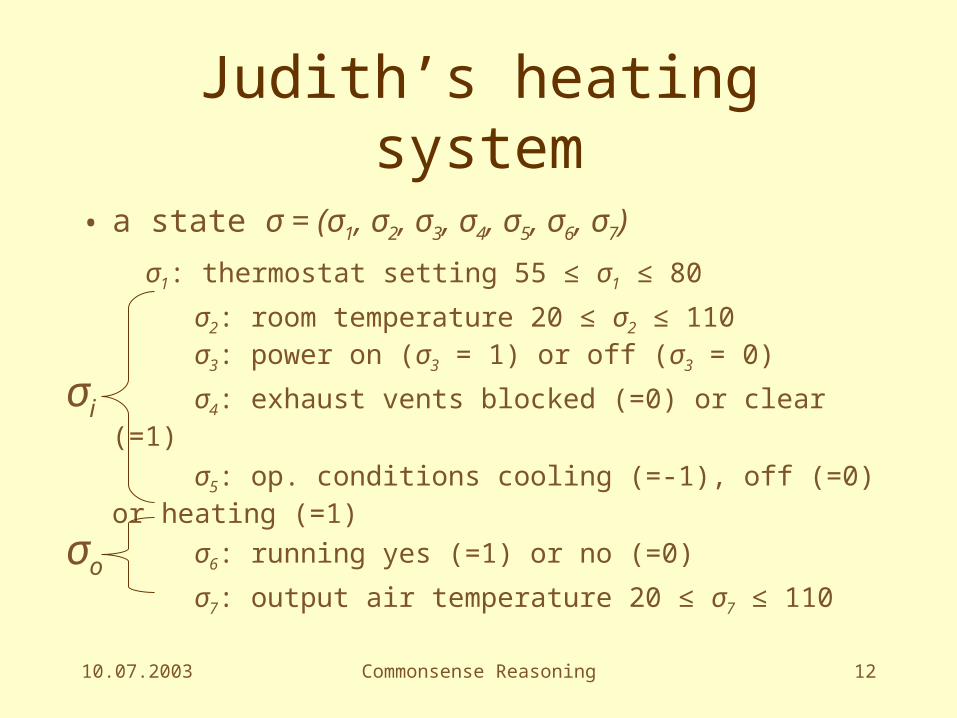
Judith’s heating system
• a state σ = (σ1, σ2, σ3, σ4, σ5, σ6, σ7)
σ1: thermostat setting 55 ≤ σ1 ≤ 80
σ2: room temperature 20 ≤ σ2 ≤ 110 σ3: power on (σ3 = 1) or off (σ3 = 0)
σ4: exhaust vents blocked (=0) or clear (=1)
σ5: op. conditions cooling (=-1), off (=0) or heating (=1)
σ6: running yes (=1) or no (=0)
σ7: output air temperature 20 ≤ σ7 ≤ 110
σi
σo
10.07.2003 Commonsense Reasoning 13
Background Conditions
• B is a function from domain P to real numbers
• P in inputs of S– is called set of parameters of B
• a state σ satisfies B if the corresponding inputs of σ have same value as given by B (σi=B(i) iP)
• B1 ≤ B2 P1 P2

10.07.2003 Commonsense Reasoning 14
Silence
• α is silent on B, if it does not tell anything about the parameters of B:– σ =B σ‘ if σt = σt‘ tB
σ,σ‘: if σ =B σ‘ and σα then σ‘α
if we are reasoning about an observable t, then t must be either an explicit input or output of the system (and not a parameter)
10.07.2003 Commonsense Reasoning 15
Judith’s heating system
(α1) thermostat: 65 ≤ σ1 ≤ 70
(α2) room temperature: σ2 = 58
(α3) power: σ3 = 0
(β) hot air is coming out of the vents
α1, α2, β are silent about σ3, σ4, σ5 (which are supposed to be the parameters)
but: α3 is not silent about σ3
α1, α2 ├ β
α1, α2 , α3 ├ ¬β

10.07.2003 Commonsense Reasoning 16
Weakening
• Γ is a set of types
• the weakening of B by Γ (B↑Γ) is the greatest lower bound of all B0 ≤ B such that every type αΓ is silent on B0
B↑α is restriction of B to the set of inputs iP such that α is silent on i

10.07.2003 Commonsense Reasoning 17
Judith’s heating system
(α1) thermostat: 65 ≤ σ1 ≤ 70
(α2) room temperature: σ2 = 58
(α3) power: σ3 = 0
(β) hot air is coming out of the vents
B = {σ3= σ4= σ5 = 1}
B↑α3 = {σ4= σ5 = 1}

10.07.2003 Commonsense Reasoning 18
Relativising to a Background Condition
• SB is relativisation of S to B– subspace of S
– only states that satisfy B
• Log(SB) is the local logic on Evt(S) supported by B– consistent states are those satisfying B
– entailment only over states satisfying B• Γ├B Δ σ sat. B (if σ p p Γ then σ q for some qΔ)
– normal tokens are those satisfying B

10.07.2003 Commonsense Reasoning 19
Judith’s heating system
(α1) thermostat: 65 ≤ σ1 ≤ 70
(α2) room temperature: σ2 = 58
(α3) power: σ3 = 0(β) hot air is coming out of the vents
• α1, α2 ├ β holds in Log(SB)• because α3 not silent about σ3: switch to B↑α3
α1, α2 ├ β does not hold in Log(SB↑α3) (is no constraint there)
α1, α2 , α3 ├ ¬β is constraint in Log(SB↑α3)

10.07.2003 Commonsense Reasoning 20
Strict Entailment
• Γ B Δ: Γ strictly entails Δ relative to B– Γ├Log(SB) Δ
– all types in Γ Δ are silent on B
• then (conclusions):– Γ B Δ is a better model of human reasoning than Γ├B Δ
– Γ B Δ is monotonic in Γ and Δ (only with weakening)
– if you have a type α not silent on B it is natural to weaken B: B↑α
– Γ B Δ does not entail: Γ, α B↑α Δ or Γ B↑α Δ, α

Representations
10.07.2003 Representations 22
Overview
• The Problem of Imperfect Representations
• Representation Systems
• Explaining Imperfect Representations
10.07.2003 Representations 23
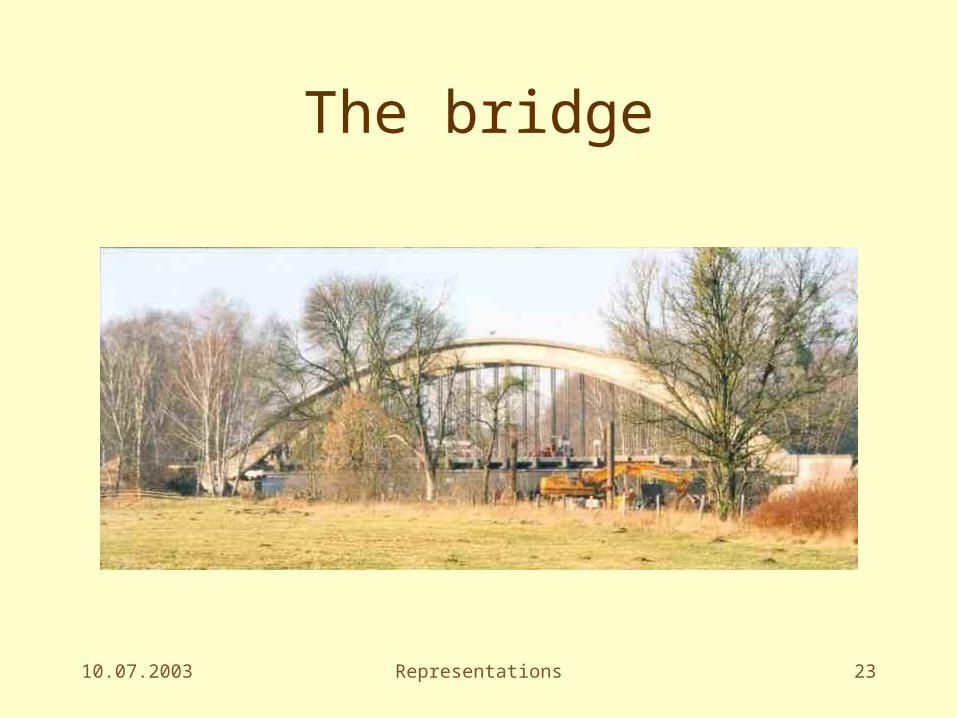
The bridge

10.07.2003 Representations 24
The Map
10.07.2003 Representations 25
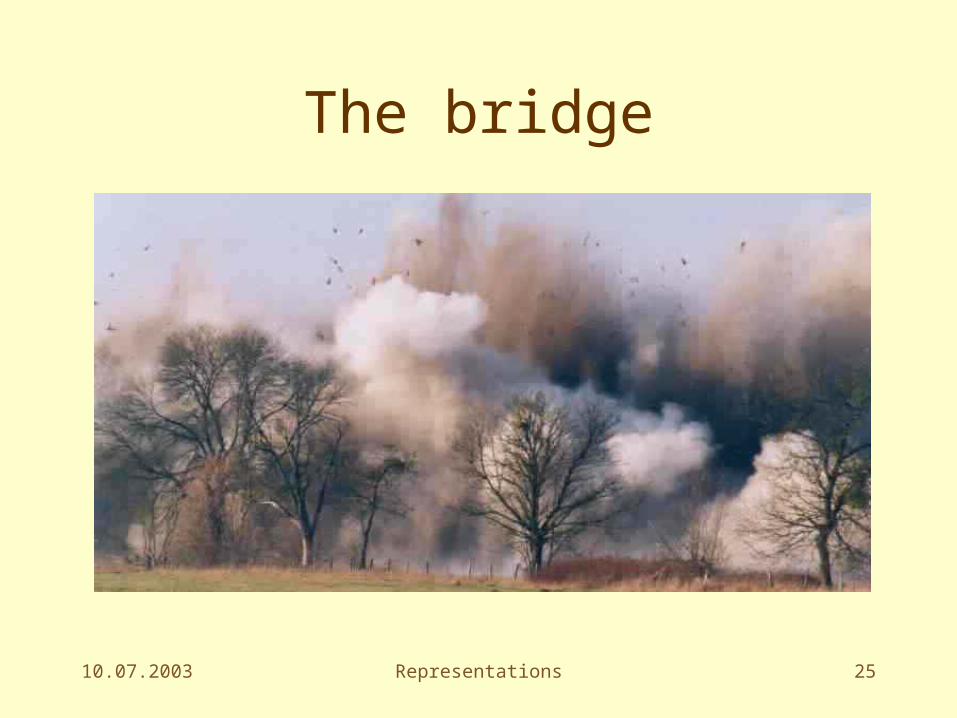
The bridge

10.07.2003 Representations 26
The bridge
10.07.2003 Representations 27
The Map
correct?
10.07.2003 Representations 28
Representation Systems
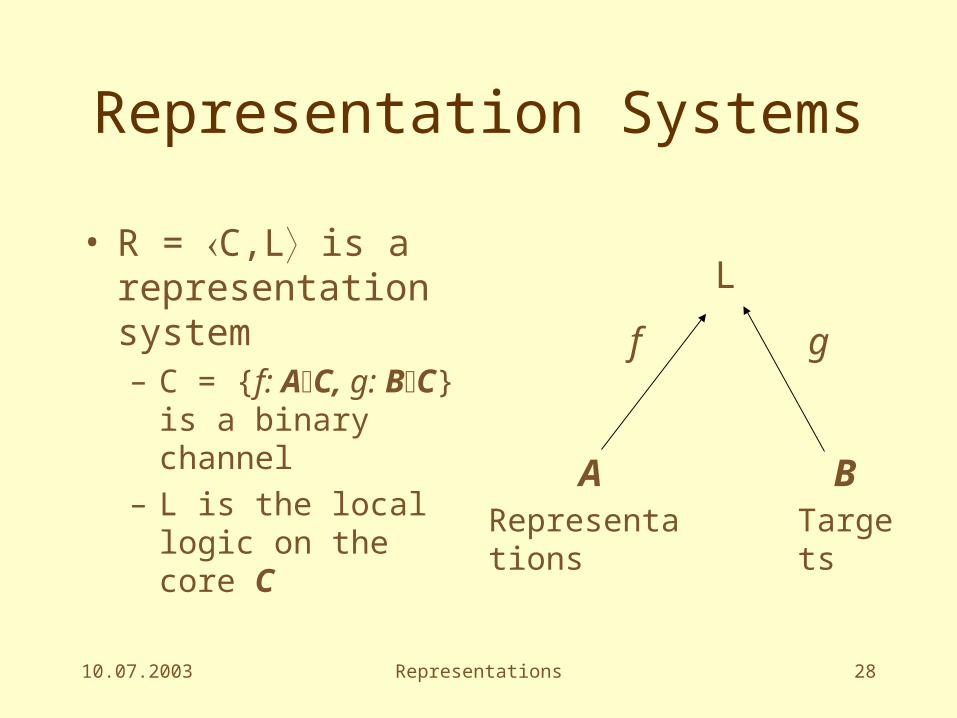
• R = C,L is a representation system– C = {f: AC, g:
BC} is a binary channel
– L is the local logic on the core C
L
A B
f g
Representations Targets
10.07.2003 Representations 29
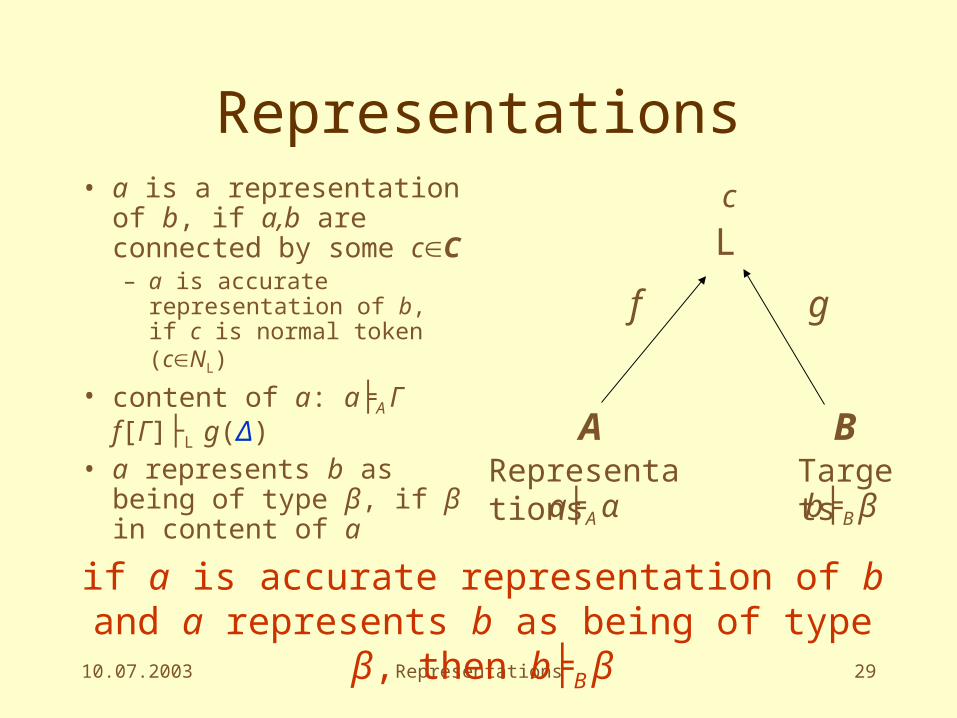
Representations• a is a representation of b,
if a,b are connected by some cC– a is accurate representation
of b, if c is normal token (cNL)
• content of a: a╞A Γ f[Γ]├L g(Δ)
• a represents b as being of type β, if β in content of a
L
A B
f g
Representations Targetsa╞A α b╞B β
c
if a is accurate representation of b and a represents b as being of type β, then b╞B β
10.07.2003 Representations 30
Explaining Imperfect Representations
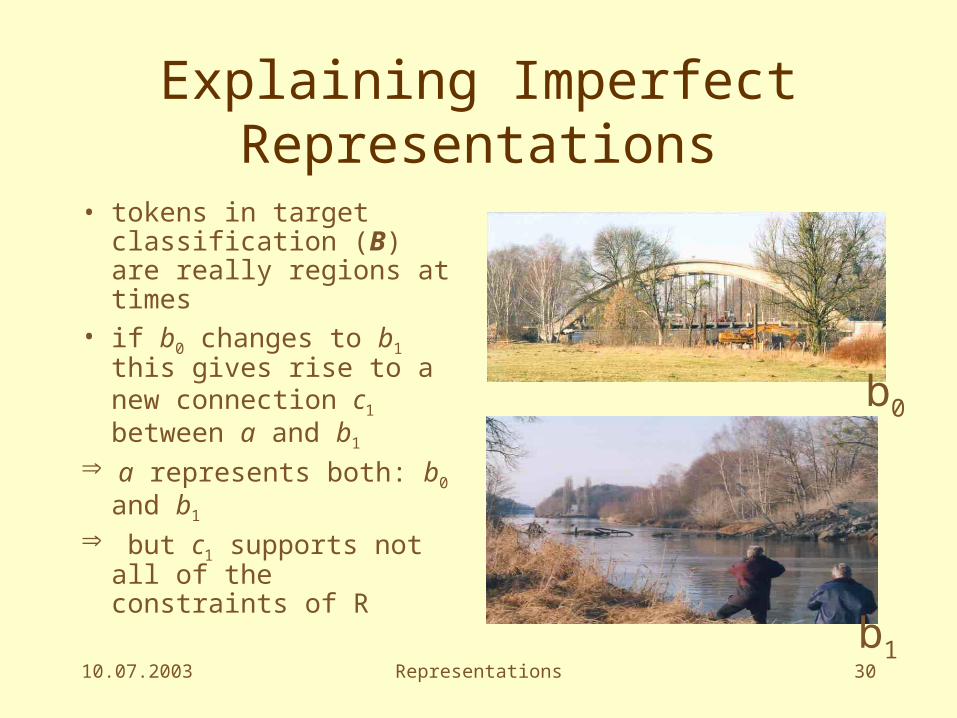
• tokens in target classification (B) are really regions at times
• if b0 changes to b1 this gives rise to a new connection c1 between a and b1
a represents both: b0 and b1
but c1 supports not all of the constraints of R
b0
b1

10.07.2003 Applications of Channel Theory 31
References
• Jon Barwise and Jerry Seligman, Information Flow, The Logic of Distributed Systems, Cambridge University Press, 1997