section de génie mécanique - stisrv13.epfl.ch · section de génie mécanique...
TRANSCRIPT
SECTION DE
Génie mécanique
The effect of wing phasing on the aerodynamic forces on the wings of a dragonfly-‐type ornithopter
Author
Alice Concordel
Acknowledgements
Prof. Akira Azuma
Ryohei Kazama
Shin’nosuke Hirakawa
Objec>ve & Method
Experimental method
Force sensing
Conclusions
Supervisors
Prof. Jamie Paik
Prof. Isao Shimoyama
Dr. Hidetoshi Takahashi
2 MEMS piezoresisFve canFlever differenFal pressure sensors [4] aLached to leM-‐hand side wings measure the pressure difference above and below the wing. The sensor chips are aLached and connected via wire bonding to flexible electrodes, which are aLached to the wing on a Ø 0.5 mm hole using beeswax. The sensor chip is placed at ½ wing length and ¼ wing chord.
[4] H. Takahashi, K. Matsumoto, and I. Shimoyama, "Differen>al pressure distribu>on measurement for the development of insect-‐sized wings," Measurement Science and Technology, vol. 24, no. 5, p. 055304, 2013.
Types of flights -‐ Tethered flights à Correspond to hovering flight -‐ Free flights (manual launch) à Body angle between
40° and 60° à Horizontal velocity
1.34 SD 0.16 m/s
12 tethered & 18 free flights, sampling the space of phase lag angles.
Collected data -‐ DifferenFal pressure -‐ Movement analysis à Body posiFon and angle à Wing angle and feathering
Objec>ve Evaluate the effect of wing phasing on the flight mode
Method -‐ Create an ornithopter which isolates the wing phasing from the other degrees of freedom of the wing moFon.
-‐ Measure the forces on the wings -‐ Track the wing and body movement -‐ IdenFfy effects
Biologists’ observa>on -‐ Dragonflies most oMen flap at phase 270°
Finding -‐ 270° is most efficient
Biologists’ observa>on -‐ Hindwings generate most of the thrust because they are larger -‐ Forewings are used for steering Finding -‐ With iden>cal wings, higher performance on hindwing at 270° -‐ Constant performance on forewing
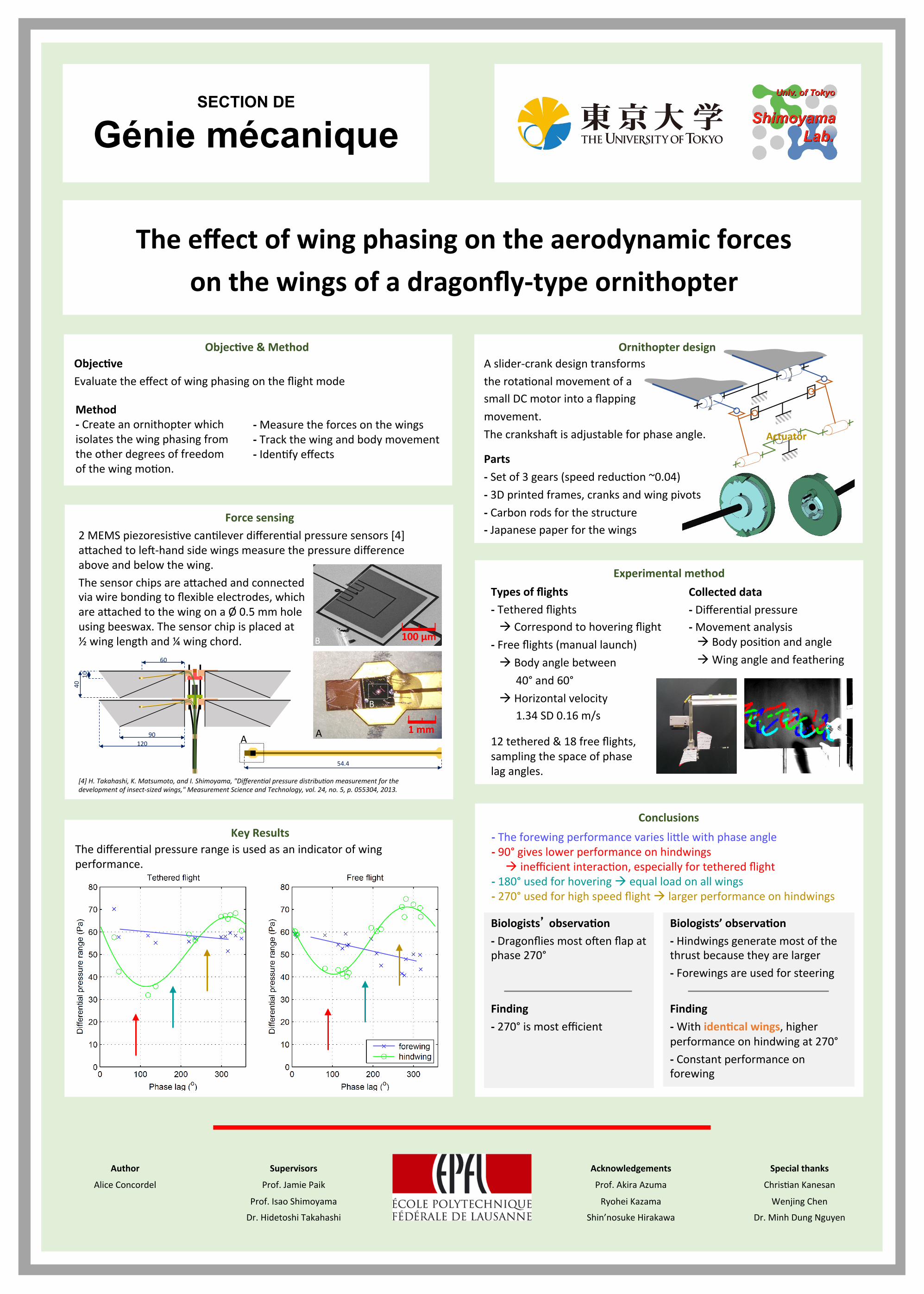
-‐ The forewing performance varies liLle with phase angle -‐ 90° gives lower performance on hindwings à inefficient interacFon, especially for tethered flight -‐ 180° used for hovering à equal load on all wings -‐ 270° used for high speed flight à larger performance on hindwings
Ornithopter design
60
120
40 10
・
・
90 1 mm
B
A
100 μm B
A slider-‐crank design transforms the rotaFonal movement of a small DC motor into a flapping movement. The crankshaM is adjustable for phase angle.
Parts -‐ Set of 3 gears (speed reducFon ~0.04) -‐ 3D printed frames, cranks and wing pivots -‐ Carbon rods for the structure -‐ Japanese paper for the wings
Key Results The differenFal pressure range is used as an indicator of wing performance.
Special thanks
ChrisFan Kanesan
Wenjing Chen
Dr. Minh Dung Nguyen
54.4
A・
Actuator