slides chap3
TRANSCRIPT

ELEC2400 Signals & SystemsChapter 3. Modelling, Differential Equations and
System Properties
Brett Ninnes
School of Electrical Engineering and Computer Science
The University of Newcastle
Slides by Juan I. Yuz ([email protected]) - July 24, 2003 – p.1/100
3. Modelling, Differential Equations and System Properties
In most engineering scenarios, signals are related bythe laws of physics.
The equations involved can be very complicated,although the essential characteristics can be capturedby a simplified analysis.
Physical models can be very often expressed asdifferential equations.
This provide insight into the general principles toderive, describe and analyse these models.
Chapter 3. Modelling, Differential Equations and System Properties – p.2/100
Electrical Circuits Modelling
Kirchoff Current and Voltage conservation laws:
(KCL)∑
k
ik(t) = 0
(KVL)∑
n
vn(t) = 0
Fundamental passive components:
Resistor (Ohm’s Law) vn(t) = R ik(t)
Inductor vn(t) = Ld
dtik(t)
Capacitor ik(t) = Cd
dtvn(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.3/100

Example: RC circuit
+−
+
+
−
−
vR(t)
i(t)
vC(t)v(t)
We have that
by Kirchoff’s Voltage Law:v(t) = vR(t) + vC(t)
by Ohm’s Law:vR(t) = R i(t)
by the capacitive action:
i(t) = Cd
dtvC(t).
Replacing in KVL, this yields:
v(t) = RCd
dtvC(t) + vC(t) ⇐⇒
d
dtvC(t) +
1
RCvC(t) =
1
RCv(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.4/100
Mechanical System Modelling
For a given a body, we have:
position u(t)
velocity v(t) = ddt
u(t)
acceleration a(t) = ddt
v(t) = d2
dt2u(t)
The sum of forces on a body of mass m, moving onlyin one axis, makes it accelerate:
(Newton’s 2nd Law)∑
k
Fk(t) = ma(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.5/100
Mechanical System Modelling
As well, many physical mechanical components obeylaws expressible via differential equation.
For a spring:
Fk(t) = −ksxk(t)
where ks is the spring constant, and positive xk(t)corresponds to spring stretching.For a damper (or dash-pot):
Fk(t) = −kd
d
dtxk(t)
where kd is the damper viscosity, and positive xk(t)corresponds to extension (of the damper).
Chapter 3. Modelling, Differential Equations and System Properties – p.6/100

Example 1: Car Shock Absorber
Spring Damper
F1(t) = mg
Road
CAR CHASSIS
F3(t) = −kd
d
dt[y(t) − u(t)]
u(t)
y(t)
F2(t) = −ks [y(t) − u(t)]
Three forces:(gravity) F1(t) = mg
(the spring) F2(t) = −ks[y(t) − u(t)]
(the damper) F3(t) = −kdddt
[y(t) − u(t)]
Chapter 3. Modelling, Differential Equations and System Properties – p.7/100
Example 1: Car Shock Absorber
By the Newton 2nd Law:
F1(t) + F2(t) + F3(t) = ma(t)
mg − ks[y(t) − u(t)] − kdd
dt[y(t) − u(t)] = m
d2
dt2y(t)
Which (rearranging) yields:
d2
dt2y(t) +
kd
m
d
dty(t) +
ks
my(t) = g +
kd
m
d
dtu(t) +
ks
mu(t)
And, making y(t) = y(t) − mg/ks :
d2
dt2y(t) +
kd
m
d
dty(t) +
ks
my(t) =
kd
m
d
dtu(t) +
ks
mu(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.8/100
Example 2: Car Velocity
x(t)
F1(t) F2(t)
Consider a car subject to the engine force F1(t), and thewind resistance F2(t) proportional to velocity:
F2(t) = kv(t) , v(t) ,d
dtx(t)
And the acceleration a(t) is the time rate of change ofvelocity v(t):
a(t) =d
dtv(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.9/100

Example 2: Car Velocity
x(t)
F1(t) F2(t)
Using Newton’s 2nd law, we get a relationship betweenthe motor induced force F1(t) = f(t) and the car velocityv(t):
F1(t) − F2(t) = f(t) − kv(t) = md
dtv(t)
Which may be re-written as:
d
dtv(t) +
k
mv(t) =
1
mf(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.10/100
Example 3: Water Tank
Suface Area = A m2
y(t)
u(t)
h(t)
Consider a circular water tank of surface area A [m2], subject to aninflow u(t) [m3/s] and a resulting outflow y(t) [m3/s].The total volume V (t) of water in the tank at any time is:
V (t) = Ah(t)
Thus:d
dtV (t) = A
d
dth(t) = u(t) − y(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.11/100
Example 3: Water Tank
Suface Area = A m2
y(t)
u(t)
h(t)
The output flow rate y(t) is proportional to the pressure at thebottom of the tank, and in turn this pressure is proportional to theheight h(t):
y(t) = Kh(t) for some K ∈ R+
Thus, the final differential equation model is:
A
K·
d
dty(t) + y(t) = u(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.12/100

Example 4: Coupled Water Tanks
u(t)
y(t)
Suface Area = A2 m2
h2(t)
h1(t)
Suface Area = A1 m2
x(t)
Consider now that the outflow x(t) of one tank of surface area A1
becomes the inflow of a second tank of surface area A2.
As per the previous example, we have that:
A1d
dth1(t) = u(t) − x(t)
A2d
dth2(t) = x(t) − y(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.13/100
Example 4: Coupled Water Tanks
u(t)
y(t)
Suface Area = A2 m2
h2(t)
h1(t)
Suface Area = A1 m2
x(t)
The flow rate x(t) is proportional to the pressure difference, which isproportional to h1(t) − h2(t). That is:
x(t) = K1[h1(t) − h2(t)] for some K1 ∈ R+
(Note that x(t) can be negative)Finally, as in the previous example:
y(t) = K2h2(t) for some K2 ∈ R+
Chapter 3. Modelling, Differential Equations and System Properties – p.14/100
Example 4: Coupled Water Tanks
Substituting the expressions for x(t) and h2(t), we have:
A1d
dth1(t) = u(t) − K1
[
h1(t) −1
K2y(t)
]
A2
K2
d
dty(t) = K1
[
h1(t) −1
K2y(t)
]
− y(t) (∗)
Which can be rewritten as:
d
dth1(t) = −
K1
A1h1(t) +
1
A1
[
u(t) +1
K2y(t)
]
h1(t) =A2
K1K2
d
dty(t) +
(K1 + K2
K1K2
)
y(t)
Differentiating (∗) and replacing h1(t), we obtain the final differentialequation model relating input flow rate u(t) to output flow rate y(t):
(A1A2
K1K2
)d2
dt2y(t) +
(A1 + A2
K2+
A1
K1
)d
dty(t) + y(t) = u(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.15/100

General Differential Equation Models
For a wide class of physical phenomena, two signals y(t)and u(t) are related by a differential equation:
dn
dtny(t) + an−1
dn−1
dtn−1y(t) + · · · + a1
d
dty(t) + a0y(t) =
bm
dm
dtmu(t) + · · · + b1
d
dtu(t) + b0u(t)
which is linear, time-invariant and finite dimensional.
In the previous examples:
ddt
vC(t) + 1RC
vC(t) = 1RC
v(t)
d2
dt2y(t) + kd
m
ddt
y(t) + ks
my(t) = kd
m
ddt
u(t) + ks
mu(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.16/100
First Order Differential Equations
Given a differential equation which describes therelationship between y(t) and u(t), can an explicitformula for y(t) be given?
We consider a simple case, where n = 1 and m = 0:
d
dty(t) + a0y(t) = b0u(t).
It is called a first order differential equation (onlyfirst derivatives present).We are interested in obtaining a solution y(t) interms of u(t) and the initial condition y(t0) = y0.
Chapter 3. Modelling, Differential Equations and System Properties – p.17/100
Solution of First Order Differential Equations
To solve the equation we use an integrating factor, ea0t :
ea0td
dty(t) + ea0ta0y(t) = ea0tb0u(t)
d
dt
[ea0t · y(t)
]= ea0tb0u(t)
And, using the fact that:
∫ t
t0
[d
dσf(σ)
]
dσ = f(t) − f(t0)
we can integrate both sides to give:
y(t) · ea0t = y(t0) ea0t0 +
∫ t
t0
ea0σb0 u(σ) dσ
Chapter 3. Modelling, Differential Equations and System Properties – p.18/100

Solution of First Order Differential Equations
In summary, the first order differential equation:
d
dty(t) + a0y(t) = b0u(t)
has solution y(t) which is given by:
y(t) = y0ea0(t0−t) +
∫ t
t0
ea0(σ−t)b0 u(σ) dσ ; t ≥ t0
This solution, at time t = t0 passes through the point:
y(t0) = y0
Chapter 3. Modelling, Differential Equations and System Properties – p.19/100
Example: First Order System with Step Input
Consider u(t) = 1(t) and y(0) = y0, for the equation:d
dty(t) + a0y(t) = b0u(t).
The solution is given by y(t) = y0e−a0t +
b0
a0
[1 − e−a0t
].
b0
a0
y0
0Time (seconds) 5/a0
y(t) = y0e−a0t +b0
a0[1 − e−a0t]
Chapter 3. Modelling, Differential Equations and System Properties – p.20/100
State Space Descriptions
More generally, n,m > 1 in:
dn
dtny(t) + an−1
dn−1
dtn−1y(t) + · · · + a1
d
dty(t) + a0y(t) =
bmdm
dtmu(t) + · · · + b1
d
dtu(t) + b0u(t)
State-space descriptions reduce high order scalardifferential equations to vector first order ones.
The associated vector quantity is known as thestate-vector, and its dimension is equal to n.
The advantage of reduction to first-order vectordifferential equation is ability to provide solutions.
Chapter 3. Modelling, Differential Equations and System Properties – p.21/100

State Space Descriptions: The Second Order Case
Consider a second order differential equation (n = 2):
d2
dt2y(t) + a1
d
dty(t) + a0y(t) = b1
d
dtu(t) + b0u(t)
It may be re-written as:
d
dt
[d
dty(t) + a1y(t) − b1u(t)
]
+ a0y(t) = b0u(t)
Introduce the new signals:
x1(t) , y(t)
x2(t) ,d
dty(t) + a1y(t) − b1u(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.22/100
State Space Descriptions: The Second Order Case
Replacing, we have:
d
dtx1(t) + a1x1(t) − b1 = x2(t) (definition of x2(t))
d
dtx2(t) + a0x1(t) = b0u(t) (original 2nd order eq.)
These two coupled first-order differential equations may becompactly expressed in matrix-vector form as:
d
dt
[
x1(t)
x2(t)
]
=
[
−a1 1
−a0 0
][
x1(t)
x2(t)
]
+
[
b1
b0
]
u(t)
y(t) =[
1 0][
x1(t)
x2(t)
]
Chapter 3. Modelling, Differential Equations and System Properties – p.23/100
State Space Descriptions: The Second Order Case
We then have a state-space description for the 2nd orderdifferential equation:
d
dtx(t) = Ax(t) + Bu(t)
y(t) = Cx(t).
where:
x(t) ,
[
x1(t)
x2(t)
]
, A ,
[
−a1 1
−a0 0
]
, B ,
[
b1
b0
]
, C ,[
1 0]
Chapter 3. Modelling, Differential Equations and System Properties – p.24/100

Example: Shock Absorber (Revisited)
For a car shock absorber, with y(t) = y(t) − mg/ks, weobtained a 2nd order model of the form:
d2
dt2y(t) +
kd
m
d
dty(t) +
ks
my(t) =
kd
m
d
dtu(t) +
ks
mu(t)
The corresponding state-space description is given by:
d
dtx(t) =
−kd
m1
−ks
m0
x(t) +
kd
m
ks
m
u(t)
y(t) =[
1 0]
x(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.25/100
State Space Descriptions: The General Case
Consider the general differential equation, with m ≤ n − 1:n∑
k=1
ak
dk
dtky(t) + a0y(t) =
n−1∑
`=1
b`
d`
dt`u(t) + b0u(t)
It may be re-written as:
d
dt
[n∑
k=1
ak
dk−1
dtk−1y(t) −
n−1∑
`=1
b`
d`−1
dt`−1u(t)
]
︸ ︷︷ ︸
xn(t)
= −a0 y(t)︸︷︷︸
x1(t)
+b0u(t).
Which implies a first-order relationship:
d
dtxn(t) = −a0x1(t) + b0u(t).
Chapter 3. Modelling, Differential Equations and System Properties – p.26/100
State Space Descriptions: The General Case
This re-parameterisation can be repeated:
xn(t) ,
n∑
k=1
ak
dk−1
dtk−1y(t) −
n−1∑
`=1
b`
d`−1
dt`−1u(t)
=d
dt
[n∑
k=2
ak
dk−2
dtk−2y(t) −
n−1∑
`=2
b`
d`−2
dt`−2u(t)
]
︸ ︷︷ ︸
xn−1(t)
+a1 y(t)︸︷︷︸
x1(t)
−b1u(t)
so that:
d
dtxn−1(t) = xn(t) − a1x1(t) + b1u(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.27/100

State Space Descriptions: The General Case
Repeating this process n − 1 times yields n coupled firstorder differential equations:
d
dtxn(t) = −a0x1(t) + b0u(t)
d
dtxn−1(t) = xn(t) − a1x1(t) + b1u(t)
d
dtxn−2(t) = xn−1(t) − a2x1(t) + b2u(t)
......
d
dtx1(t) = x2(t) − an−1x1(t) + bn−1u(t)
and where y(t) = x1(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.28/100
State Space Descriptions: The General Case
Putting in matrix-vector form:
d
dt
x1(t)
x2(t)...
xn−1(t)
xn(t)
=
−an−1 1 0 · · · 0
−an−2 0 1 · · · 0... . . . . . . ...
−a1 0 0 1
−a0 0 · · · 0 0
x1(t)
x2(t)...
xn−1(t)
xn(t)
+
bn−1
bn−2...b1
b0
u(t)
y(t) =[
1 0 · · · 0 0]
x1(t)
x2(t)...
xn−1(t)
xn(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.29/100
State Space Descriptions: The General Case
In summary, the n’th order differential equation:
dn
dtny(t) + an−1
dn−1
dtn−1y(t) + · · · + a1
d
dty(t) + a0y(t) =
bn−1dn−1
dtn−1u(t) + · · · + b0u(t).
may be re-expressed as a state-space representation, interms of the n dimensional state vector x(t):
d
dtx(t) = Ax(t) + Bu(t)
y(t) = Cx(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.30/100
State Space Descriptions: The General Case
Where:
A ,
−an−1 1 0 · · · 0
−an−2 0 1 · · · 0... . . . . . . ...
−a1 0 0 1
−a0 0 · · · 0 0
, B ,
bn−1
bn−2...b1
b0
,
C ,[
1 0 · · · 0 0]
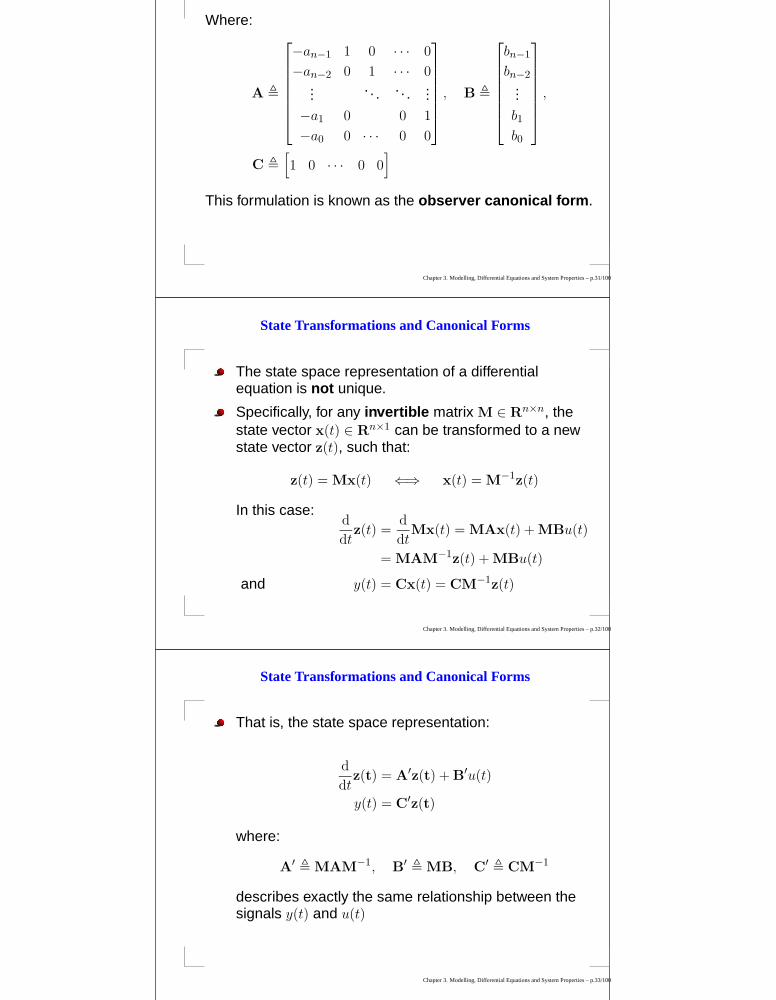
This formulation is known as the observer canonical form.
Chapter 3. Modelling, Differential Equations and System Properties – p.31/100
State Transformations and Canonical Forms
The state space representation of a differentialequation is not unique.
Specifically, for any invertible matrix M ∈ Rn×n, thestate vector x(t) ∈ Rn×1 can be transformed to a newstate vector z(t), such that:
z(t) = Mx(t) ⇐⇒ x(t) = M−1z(t)
In this case:d
dtz(t) =
d
dtMx(t) = MAx(t) + MBu(t)
= MAM−1z(t) + MBu(t)
and y(t) = Cx(t) = CM−1z(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.32/100
State Transformations and Canonical Forms
That is, the state space representation:
d
dtz(t) = A′z(t) + B′u(t)
y(t) = C′z(t)
where:
A′ , MAM−1, B′ , MB, C′ , CM−1
describes exactly the same relationship between thesignals y(t) and u(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.33/100

State Transformations and Canonical Forms
For example, controller canonical form:
A ,
−an−1 −an−2 · · · −a1 −a0
1 0 · · · 0 0
0 1 · · · 0 0...
... . . . ......
0 0 · · · 1 0
B ,
1
0...0
0
C ,[
bn−1 bn−2 · · · b1 b0
]
There are also observability and controllabilitycanonical forms, similar to the preceding.
Chapter 3. Modelling, Differential Equations and System Properties – p.34/100
State Space Descriptions: The Feed-through Term
We have considered the general differential equation:
dn
dtny(t) + · · · + a2
d2
dt2y(t) + a1
d
dty(t) + a0y(t) =
bm
dm
dtmu(t) + · · · + b0u(t)
where we restricted m < n.
We now consider the case m = n, and hence there is aterm dn
dtn u(t) on the right hand side:
n∑
k=0
ak
dk
dtky(t) = bn
dn
dtnu(t) +
n−1∑
k=0
bk
dk
dtku(t).
Chapter 3. Modelling, Differential Equations and System Properties – p.35/100
State Space Descriptions: The Feed-through Term
We can rewrite the equation, remembering an = 1:
n∑
k=0
akdk
dtky(t) − bn
dn
dtnu(t) =
n−1∑
k=0
bkdk
dtku(t)
n∑
k=0
akdk
dtky(t) −
n∑
k=0
akbndk
dtku(t) =
n−1∑
k=0
bkdk
dtku(t) −
n−1∑
k=0
akbndk
dtku(t)
n∑
k=0
akdk
dtk(y(t) − bnu(t))︸ ︷︷ ︸
z(t)
=n−1∑
k=0
(bk − akbn)︸ ︷︷ ︸
bn
dk
dtku(t)
Considering z(t) as output variable, this can now be written instate-space form.
Chapter 3. Modelling, Differential Equations and System Properties – p.36/100

State Space Descriptions: The Feed-through Term
Then we have:
d
dtx(t) = Ax(t) + Bu(t)
z(t) = Cx(t)
and using z(t) = y(t) − bnu(t), it is equivalent to:
d
dtx(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + D u(t)
where D = bn, and it is called the feed-through term:it is the proportion of u(t) directly fed-through to y(t).
Chapter 3. Modelling, Differential Equations and System Properties – p.37/100
State Space Descriptions: The Feed-through Term
In summary, the differential equation relationship:
dn
dtny(t)+an−1
dn−1
dtn−1y(t)+ · · ·+a0y(t) = bn
dn
dtnu(t)+ · · ·+b0u(t)
may be expressed as a state-space representation:d
dtx(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
In observer canonical form A,B,C, D are given as:
A �
����������
�
−an−1 1 0 · · · 0
−an−2 0 1 · · · 0
......
. . ....
−a1 0 1
−a0 0 · · · · · · 0
����������
�
B �
����������
�
bn−1 − bnan−1
bn−2 − bnan−2
...
b1 − bna1
b0 − bna0
����������
�
C � �1 0 0 · · · 0 � D � bn
Chapter 3. Modelling, Differential Equations and System Properties – p.38/100
State Space Descriptions: The Feed-through Term
While, in controller canonical form the matricesA,B,C, D are given as:
A �
����������
�
−an−1 −an−2 · · · −a1 −a0
1 0 · · · 0 0
0 1 · · · 0 0
......
. . ....
...
0 0 · · · 1 0
����������
�
B �
����������
�
1
0
...
0
0
����������
�
C �
����������
�
bn−1 − bnan−1
bn−2 − bnan−2
...
b1 − bna1
b0 − bna0
����������
�
T
D � bn
Chapter 3. Modelling, Differential Equations and System Properties – p.39/100

Direct State-Space Modelling
Sometimes, in physical modelling, it may be natural toprogress directly to a state space form:
+
−
+
−
+ −
vL(t)
vC(t) R vR(t)C
L
i(t)
Kirchoff’s laws:
iC(t) = Cd
dtvC(t) = i(t) − iL(t)
vL(t) = Ld
dtiL(t) = vC(t) − RiL(t)
Which are expressible as:
d
dtvC(t) = −
1
CiL(t) +
1
Ci(t)
d
dtiL(t) =
1
LvC(t) −
R
LiL(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.40/100
Direct State-Space Modelling
Writing these two differential equations in matrix-vectorform gives:
+
−
+
−
+ −
vL(t)
vC(t) R vR(t)C
L
i(t)
State-space model:
d
dt
vC(t)
iL(t)
︸ ︷︷ ︸
x(t)
=
0 −1/C
1/L −R/L
︸ ︷︷ ︸
A
vC(t)
iL(t)
︸ ︷︷ ︸
x(t)
+
1/C
0
︸ ︷︷ ︸
B
i(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.41/100
Direct State-Space Modelling
u(t)
y(t)
Suface Area = A2 m2
h2(t)
h1(t)
Suface Area = A1 m2
x(t)
Recall the coupled tank system, where:
A1d
dth1(t) = u(t) − x(t)
A2d
dth2(t) = x(t) − y(t)
The flow between the tanks is x(t) = K1[h1(t) − h2(t)].The output flow is y(t) = K2h2(t).
Chapter 3. Modelling, Differential Equations and System Properties – p.42/100

Direct State-Space Modelling
u(t)
y(t)
Suface Area = A2 m2
h2(t)
h1(t)
Suface Area = A1 m2
x(t)
This yields the state-space model:
d
dt
h1(t)
h2(t)
=
−K1/A1 K1/A1
K1/A2 −(K1 + K2)/A2
h1(t)
h2(t)
+
1/A1
0
u(t)
y(t) =[
0 K2
]
h1(t)
h2(t)
Chapter 3. Modelling, Differential Equations and System Properties – p.43/100
Differential equation solution via state-space
Recall that the 1st order scalar differential equation:
d
dty(t) = −a0y(t) + b0u(t), y(t0) = y0
is solved, for a given signal u(t), by:
y(t) = e−a0(t−t0)y0 +
∫ t
t0
ea0(σ−t)b0u(σ) dσ.
What is solution the 1st order vector state-spacedifferential equation:
d
dtx(t) = Ax(t) + Bu(t), x(t0) = x0 ?
Chapter 3. Modelling, Differential Equations and System Properties – p.44/100
Differential equation solution via state-space
Using the previous methods, the solution of:
d
dtx(t) = Ax(t) + Bu(t), x(t0) = x0
is: x(t) = eA(t−t0)x0 +
∫ t
t0
eA(t−σ)Bu(σ) dσ
where the Matrix-Exponential eAt is defined as:
exp(At) = eAt = I + At +A2t2
2!+ . . . =
∞∑
k=0
Aktk
k!
which satisfiesd
dteAt = AeAt = eAtA
Chapter 3. Modelling, Differential Equations and System Properties – p.45/100

Differential equation solution via state-space
Matrix Exponential: Example
Consider the matrix A =
1 2
3 4
.
Then according to the definition:
eA =
1 0
0 1
+
1 2
3 4
+1
2
1 2
3 4
2
+1
6
1 2
3 4
3
+ · · ·
=
51.9690 74.7366
112.1048 164.0738
Note that this is quite different to the matrix:
e1 e2
e3 e4
=
2.7183 7.3891
20.0855 54.5982
Chapter 3. Modelling, Differential Equations and System Properties – p.46/100
Differential equation solution via state-space
In summary, the solution y(t) of the equation:
dn
dtny(t) + an−1
dn−1
dtn−1y(t) + . . . + a0y(t) = bn
dn
dtnu(t) + . . . + b0u(t)
is given by:
y(t) = CeA(t−t0)x0 +
∫ t
t0
CeA(t−σ)Bu(σ) dσ + Du(t)
where: d
dtx(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
The solution y(t) satisfies y(t0) = Cx0 + Du(t0).
Chapter 3. Modelling, Differential Equations and System Properties – p.47/100
Differential Equation Solution via State-Space: Example
Consider the 2nd order equation (α, β ∈ R):
d2
dt2y(t) + (α + β)
d
dty(t) + αβy(t) = b1
d
dtu(t) + b0u(t).
In state-space form:
d
dtx(t) = Ax(t) + Bu(t)
y(t) = Cx(t)
where:
A ,
[
−(α + β) 1
−αβ 0
]
, B ,
[
b1
b0
]
, C ,[
1 0]
Chapter 3. Modelling, Differential Equations and System Properties – p.48/100

Differential Equation Solution via State-Space: Example
The solution is:
y(t) = Cx(t) = CeA(t−t0)x0 +
∫ t
t0
g(t − σ)u(σ) dσ
where g(t) , CeAtB. To obtain eAt, we diagonalize A:
A = S−1ΛS
⇒ Ak = S−1ΛSS−1ΛS · · ·S−1ΛS = S−1ΛkS
⇒ eAt =
∞∑
k=0
Aktk
k!= S−1
(∞∑
k=0
Λktk
k!
)
S
Chapter 3. Modelling, Differential Equations and System Properties – p.49/100
Differential Equation Solution via State-Space: Example
Therefore:
g(t) = CeAtB
=1
(α − β)[1, 0]
αe−αt − βe−βt e−βt − e−αt
αβ[e−αt − e−βt
]αe−βt − βe−αt
b1
b0
= κ1e−αt + κ2e
−βt
And, if we consider u(t) = 1(t), x0 = 0, and t0 = 0:
y(t) =
∫ t
t0
g(t − σ)1(σ) dσ =
∫ t
0κ1e
−α(t−σ) + κ2e−β(t−σ) dσ
=κ1
α(1 − e−αt) +
κ2
β(1 − e−βt)
Chapter 3. Modelling, Differential Equations and System Properties – p.50/100
Differential equation solution via state-space
In the example, the assumptions
a1 = α + β
a0 = αβ
for some α, β ∈ R, are not completely general.
We didn’t consider the cases α = β or α, β ∈ C.
The difficulty with which the matrix exponential eAt wasobtained, is an indication that state-space formulationsmay not be the best method.
This will motivate our study of Laplace-Transformmethods (Chapter 4).
Chapter 3. Modelling, Differential Equations and System Properties – p.51/100

Initial Conditions
An important point is that the solution:
y(t) = CeA(t−t0)x0 +
∫ t
t0
CeA(t−σ)Bu(σ) dσ + Du(t)
is unique only up to the choice of x(t0) = x0.
The uniqueness of the solution depends upon theinitial conditions at time t = t0 for
y(t), dy(t)/dt, . . . , dn−1y(t)/dtn−1 and
u(t), du(t)/dt, . . . , dn−1u(t)/dtn−1.
Chapter 3. Modelling, Differential Equations and System Properties – p.52/100
Initial Conditions
Rewriting the solution y(t) as:
y(t) = CeA(t−t0)x0 + CeAt
∫ t
t0
e−AσBu(σ) dσ + Du(t)
then, differentiating with respect to t, yields:
d
dty(t) = CAeA(t−t0)x0+
CAeAt
∫ t
t0
e−AσBu(σ) dσ + CBu(t) + Dd
dtu(t)
Therefore, at time t = t0:
d
dty(t0) = CAx0 + CBu(t0) + D
d
dtu(t0)
Chapter 3. Modelling, Differential Equations and System Properties – p.53/100
Initial Conditions
Repeating this process, differentiating up to the n − 1’stderivative and setting t = t0, a pattern clearly emerges:
y(t0)
ddty(t0)
d2
dt2 y(t0)...
dn−1
dtn−1 y(t0)
︸ ︷︷ ︸
y0
=
C
CA
CA2
...
CAn−1
︸ ︷︷ ︸
O
x0+
D 0 · · · · · · 0
CB D 0 0
CAB CB D...
.... . .
. . ....
CAn−2B · · · · · · CB D
︸ ︷︷ ︸
Γ
u(t0)
ddtu(t0)
d2
dt2 u(t0)...
dn−1
dtn−1 u(t0)
︸ ︷︷ ︸
u0
which is expressible as y0 = Ox0 + Γu0.
Chapter 3. Modelling, Differential Equations and System Properties – p.54/100

Initial Conditions
A natural question is: given the initial conditions for u(t)and its derivatives (in u0), how should x0 be chosen tosatisfy the initial condition on the solution y(t) and itsderivatives (in y0) ?
The answer is simple:
x0 = O−1 [y0 − Γu0] , O ,
C
CA
CA2
...
CAn−1
The matrix O is called the observability matrix.
Chapter 3. Modelling, Differential Equations and System Properties – p.55/100
Initial Conditions: Example
Consider 2nd order system:
d2
dt2y(t) + 3
d
dty(t) + 2y(t) = 3
d
dtu(t) + 2u(t).
The state space description (observer canonical form) is:
d
dtx(t) =
−3 1
−2 0
x(t) +
3
2
u(t)
y(t) =[
1 0]
x(t)
Then y(t) = CeAtx0 +
∫ t
0
g(t − σ)u(σ) dσ
where g(t) = CeAtB = 4e−2t − e−t
Chapter 3. Modelling, Differential Equations and System Properties – p.56/100
Initial Conditions: Example
The observability matrix is given by:
O =
C
CA
=
1 0
−3 1
Now, suppose y0 = [−0.5,−1]T and u0 = [0, 0]T , then:
x0 = O−1y0 =
1 0
−3 1
−1
−0.5
−1
=
−0.5
−2.5
CeAtx0 =[
1 0]
2e−2t − e−t e−t − e−2t
2[e−2t − e−t
]2e−t − e−2t
−0.5
−2.5
= 1.5e−2t − 2e−t
so the complete solution is:
y(t) = 1.5e−2t − 2e−t +
∫ t
0
[
4e−2(t−σ) − e−(t−σ)]
u(σ) dσ.
Chapter 3. Modelling, Differential Equations and System Properties – p.57/100

Initial Conditions: Observability
For some state space realizations, the observabilitymatrix O, could be non invertible. For example:
d2
dt2y(t) + 3
d
dty(t) + 2y(t) =
d
dtu(t) + u(t)
has observer canonical form matrices:
A =
−3 1
−2 0
,C =[
1 0]
⇒ O =
C
CA
=
1 0
−3 1
But, the controller canonical form matrices are:
A =
−3 −2
1 0
,C =[
1 1]
⇒ O =
C
CA
=
1 1
−2 −2
Chapter 3. Modelling, Differential Equations and System Properties – p.58/100
Initial Conditions: Observability
This means that the state space model:
d
dtx(t) = Ax(t), x(t0) = x0
y(t) = Cx(t)
describes a richer class of systems than:
dn
dtny(t) + an−1
dn−1
dtn−1y(t) + · · · + a1
d
dty(t) + a0y(t) = 0
which only describes one input-output relationship.
If for a pair {A,C}, the observability matrix O isnon-singular, then the realisation is called observable.
Chapter 3. Modelling, Differential Equations and System Properties – p.59/100
Initial Conditions: Controllability
The concept of controllability involves the question ofwhether the state can be driven to an arbitrary valuex(t) from an arbitrary initial point x0.
To address this issue, we can assume D = 0 andx0 = 0. The state trajectory then is:
x(t) =
∫ t
t0
eA(t−σ)Bu(σ) dσ
where, the matrix exponential term is:
exp(At) = eAt = I + At +A2t2
2!+
A3t3
3!+ · · · =
∞∑
k=0
Aktk
k!
Chapter 3. Modelling, Differential Equations and System Properties – p.60/100

Initial Conditions: Controllability
The Cayley–Hamilton theorem establishes that if A isn × n, then for some constant α0, · · · , αn−1:
An = α0I + α1A + α2A2 + · · · + αn−1A
n−1
As a consequence, every power of A can beexpressed in terms of {I,A, . . . ,An−1}.
Applying the theorem above, we have that:
eAt = I + At +A2t2
2!+
A3t3
3!+ · · · =
∞∑
k=0
Aktk
k!
= β0(t)I + β1(t)A + β2(t)A2 + · · · + βn−1(t)A
n−1 =n−1∑
k=0
βk(t)Ak
Chapter 3. Modelling, Differential Equations and System Properties – p.61/100
Initial Conditions: Controllability
Substituting into the state trajectory:
x(t) =
∫ t
t0
n−1∑
k=0
βk(t − σ)AkBu(σ) dσ =n−1∑
k=0
AkB
∫ t
t0
βk(t − σ)u(σ) dσ
=[B,AB, · · · ,An−1B
]
︸ ︷︷ ︸
C
z0(t)
z1(t)...
zn−1(t)
= Cz(t)
where zk(t) ,
∫ t
t0
βk(t − σ)u(σ) dσ
The matrix C is known as the controllability matrix:
Any x(t) that are achievable by manipulation of u(t)must be a linear combination of the columns of C.
Chapter 3. Modelling, Differential Equations and System Properties – p.62/100
Initial Conditions: Controllability
In summary, given an n-dimensional linear timeinvariant system with state space description:
d
dtx(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
the n × n controllability matrix C is defined as:
C ,[B,AB,A2B, · · · ,An−1B
]
The system is termed controllable if and only if C is aninvertible matrix (full rank or det C 6= 0).
Otherwise the system is termed uncontrollable.
Chapter 3. Modelling, Differential Equations and System Properties – p.63/100

Forced and Natural Response
The solution of any differential equation:dn
dtny(t) + an−1
dn−1
dtn−1y(t) + · · · + a0y(t) = bn
dn
dtnu(t) + · · · + b0u(t).
is expressible as:
y(t) = CeA(t−t0)x0︸ ︷︷ ︸
Natural Response
+
∫ t
t0
CeA(t−σ)Bu(σ) dσ + Du(t)
︸ ︷︷ ︸
Forced Response
.
The Natural Response dependes on thecoefficients {an−1, . . . , a0, bn, . . . , b0} and the initialconditions x0.The Forced Response dependes on thecoefficients {an−1, . . . , a0, bn, . . . , b0} and the inputsignal u(t).
Chapter 3. Modelling, Differential Equations and System Properties – p.64/100
Forced and Natural Response: Example
Recall the shock absorber model,
d2
dt2y(t) +
kd
m
d
dty(t) +
ks
my(t) =
kd
m
d
dtu(t) +
ks
mu(t)
with m = 1000 kg, ks = 2000 N/m, kd = 3000 Ns/m,andinitial conditions y(0) = −0.5 and dy(0)/dt = −1.
The response of the shock absorber is:
y(t) = 1.5e−2t − 2e−t
︸ ︷︷ ︸
Natural Response
+
∫ t
0
[
4e−2(t−σ) − e−(t−σ)]
u(σ) dσ
︸ ︷︷ ︸
Forced Response
.
Chapter 3. Modelling, Differential Equations and System Properties – p.65/100
Forced and Natural Response: Example
Suppose that u(t) = 1(t − 1), then for t > 1:
∫ t
0
[
4e−2(t−σ) − e−(t−σ)]
1(σ−1) dσ = 1−2e−2(t−1)+e−(t−1)
t2 4 6 8
Forced Response
Total Response
Natural Response
1
0
−0.5
Chapter 3. Modelling, Differential Equations and System Properties – p.66/100

Impulse Response
Suppose that:Initial time t0 → −∞, i.e., a long time ago,The initial conditions, given by the vector quantitiesy0,u0 and, hence x0, are all zero at t0 = −∞.
This yields only the forced response part:
y(t) =
∫ t
−∞
g(t − σ)u(σ) dσ + Du(t)
where g(t) , CeAtB.
Clearly, given u(t), the response y(t) depends on thefunction g(t) and the feed-through term D.
Chapter 3. Modelling, Differential Equations and System Properties – p.67/100
Impulse Response
In particular, if u(t) = δ(t) (Dirac delta), for t > 0:
y(t) =
∫ t
−∞
g(t − σ)δ(σ) dσ + Dδ(t) = g(t) + Dδ(t)
Thus, the system impulse response is defined as:
h(t) ,
{
g(t) + Dδ(t) ; t ≥ 0
0 ; t < 0
For t < 0, h(t) is zero because of the zero initialconditions.
From physical modelling, commonly D = bn = 0, soh(t) = g(t).
Chapter 3. Modelling, Differential Equations and System Properties – p.68/100
Impulse Response: Example 1
For an RC-circuit, we have seen that:
d
dtvC(t)︸ ︷︷ ︸
x(t)
= −1
RC︸ ︷︷ ︸
A
vC(t)︸ ︷︷ ︸
x(t)
+1
RC︸︷︷︸
B
v(t)
Therefore:
g(t) = CeAtB =1
RCe−t/RC ⇒ h(t) =
1
RCe−t/RC ; t ≥ 0
0 ; t < 0
t
1
RC
0
1
RCe−t/RC
Chapter 3. Modelling, Differential Equations and System Properties – p.69/100

Impulse Response: Example 2
For a car shock absorver, we obtained:
d2
dt2y(t) +
kd
m
d
dty(t) +
ks
my(t) =
kd
m
d
dtu(t) +
ks
mu(t)
If m = 1000 kg, ks = 1000 N/m, kd = 500 Ns/m, then:
h(t) = CeAtB = 1.0328e−0.25t cos(0.9682t − 1.0654), t > 0
t
1.0328e−0.25t cos(0.9682t − 1.0654)
0
Chapter 3. Modelling, Differential Equations and System Properties – p.70/100
Convolution
A key result we have is that for any input u(t), and zeroinitial conditions:
y(t) =
∫ t
−∞
g(t − σ)u(σ) dσ + Du(t), g(t) , CeAtB
=
∫ t
−∞
(g(t − σ) + Dδ(t − σ)) u(σ) dσ
=
∫ ∞
−∞
h(t − σ)u(σ) dσ
Noting: σ = [t,∞) ⇒ (t − σ) ∈ (−∞, 0] ⇒ h(t − σ) = 0.
We say that y(t) is the convolution of h(t) with u(t).
The new limits give a more general expression, oftennecessary (for example, for filter design).
Chapter 3. Modelling, Differential Equations and System Properties – p.71/100
Convolution
y(t) =
∫∞
−∞
h(t − σ)u(σ) dσ = [h ~ u] (t)
Intuitively, it means that y(t) is the sum of the effects ofu(t), weighted by h(t).
Graphically, h(t) characterizes the system:
u(t)
Linear System
h(t)
y(t)u(t)
y(t) =
∫ ∞
−∞
h(t − σ)u(σ) dσ
Chapter 3. Modelling, Differential Equations and System Properties – p.72/100
Properties of Convolution
Commutative Property:
[h ~ u](t) =
∫ ∞
−∞
h(t − σ)u(σ) dσ = −
∫ −∞
∞
h(x)u(t − x) dx
=
∫ ∞
−∞
u(t − x)h(x) dx = [u ~ h](t).
Linearity:
[h ~ (αu + βw)] (t) =
∫ ∞
−∞
h(t − σ) (αu(σ) + βw(σ)) dσ
= α
∫ ∞
−∞
h(t − σ)u(σ) dσ + β
∫ ∞
−∞
h(t − σ)w(σ) dσ
= α[h ~ u](t) + β[h ~ w](t).
Chapter 3. Modelling, Differential Equations and System Properties – p.73/100
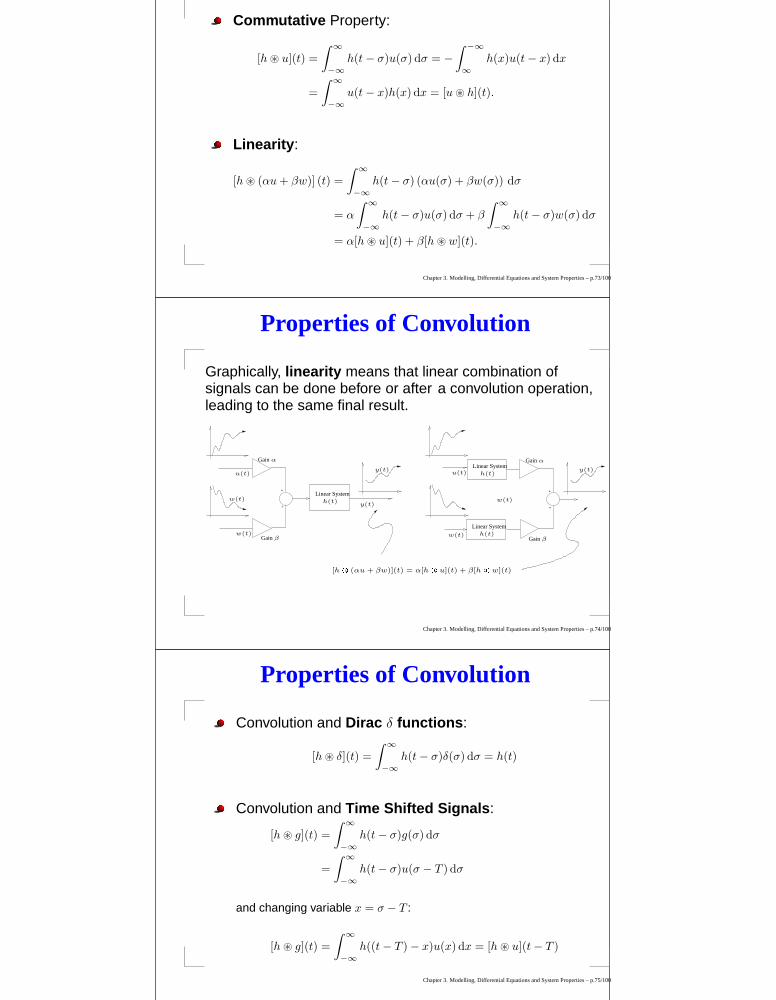
Properties of Convolution
Graphically, linearity means that linear combination ofsignals can be done before or after a convolution operation,leading to the same final result.
+
+ +
+
y(t)u(t)
y(t)
Linear Systemh(t)
Gain α
w(t)
w(t)Gain β
y(t)
Linear Systemh(t)
Linear Systemh(t)
w(t)
Gain α
Gain β
u(t)
w(t)
[h � (αu + βw)](t) = α[h � u](t) + β[h � w](t)
Chapter 3. Modelling, Differential Equations and System Properties – p.74/100
Properties of Convolution
Convolution and Dirac δ functions:
[h ~ δ](t) =
∫ ∞
−∞
h(t − σ)δ(σ) dσ = h(t)
Convolution and Time Shifted Signals:
[h ~ g](t) =
∫ ∞
−∞
h(t − σ)g(σ) dσ
=
∫ ∞
−∞
h(t − σ)u(σ − T ) dσ
and changing variable x = σ − T :
[h ~ g](t) =
∫ ∞
−∞
h((t − T ) − x)u(x) dx = [h ~ u](t − T )
Chapter 3. Modelling, Differential Equations and System Properties – p.75/100

Properties of Convolution
Associative property:
[h ~ (u ~ f)](t) =
∫ ∞
−∞
h(t − σ)[u ~ f ](σ) dσ
=
∫ ∞
−∞
h(t − σ)
[∫ ∞
−∞
u(σ − x)f(x) dx
]
dσ
=
∫ ∞
−∞
[∫ ∞
−∞
h(t − σ)u(σ − x) dσ
]
f(x) dx
changing variable τ = σ − x:
[h ~ (u ~ f)](t) =
∫ ∞
−∞
[∫ ∞
−∞
h(t − x − τ)u(τ) dτ
]
f(x) dx
=
∫ ∞
−∞
[h ~ u](t − x)f(x) dx
= [(h ~ u) ~ f ](t).
Chapter 3. Modelling, Differential Equations and System Properties – p.76/100
Properties of Convolution
Combining commutativity and associativity, we have,for example:
[h~(u~f)](t) = [h~(f~u)](t) = [(h~f)~u](t) = [(f~h)~u](t)
Linear System
h(t)
y(t)
u(t)
u(t)
Linear System
f(t)
y(t)
u(t)
u(t)
Linear SystemLinear System
f(t) h(t)
SameInput
SameOutput
OrderReversed
Chapter 3. Modelling, Differential Equations and System Properties – p.77/100
Convolution: Example
To apply the convolution:
y(t) =
∫∞
−∞
h(t − σ)u(σ) dσ
in practice, we have to consider:the effect of changing h(σ) to h(t − σ) involves theflipping and sliding of that signal,the integral is then the area obtained for differentintervals, andconmutativity ensures that we can also flip andslide u(t), obtaining the same final result.
Chapter 3. Modelling, Differential Equations and System Properties – p.78/100
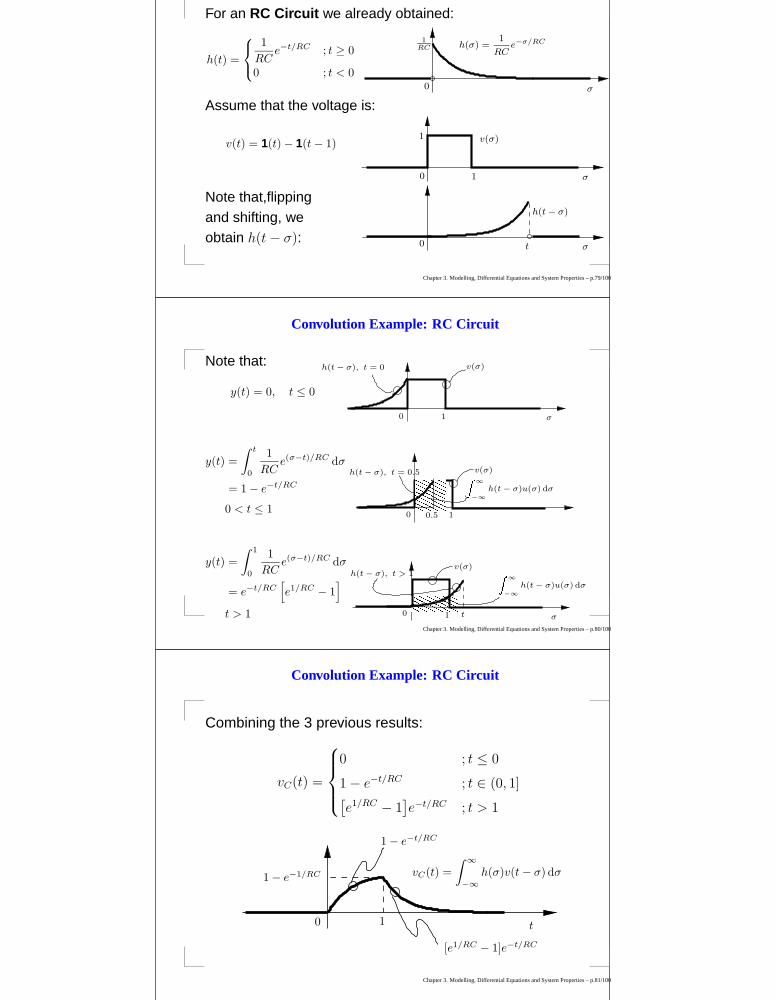
Convolution Example: RC Circuit
For an RC Circuit we already obtained:
h(t) =
1
RCe−t/RC ; t ≥ 0
0 ; t < 0
σ0
1RC h(σ) =
1
RCe−σ/RC
Assume that the voltage is:
v(t) = 1(t) − 1(t − 1)
1 σ
1
0
v(σ)
Note that,flippingand shifting, weobtain h(t − σ):
h(t − σ)
σ0 t
Chapter 3. Modelling, Differential Equations and System Properties – p.79/100
Convolution Example: RC Circuit
Note that:
y(t) = 0, t ≤ 0
σ0 1
v(σ)h(t − σ), t = 0
y(t) =
∫ t
0
1
RCe(σ−t)/RC dσ
= 1 − e−t/RC
0 < t ≤ 1 � �� �� �� �� �
� �� �� �� ��
∞
−∞
h(t − σ)u(σ) dσ
h(t − σ), t = 0.5 v(σ)
10.50
y(t) =
∫ 1
0
1
RCe(σ−t)/RC dσ
= e−t/RC[
e1/RC − 1]
t > 1 � � �� � �� � �� � �
σ0 1 t
h(t − σ), t > 1v(σ)
�
∞
−∞
h(t − σ)u(σ) dσ
Chapter 3. Modelling, Differential Equations and System Properties – p.80/100
Convolution Example: RC Circuit
Combining the 3 previous results:
vC(t) =
0 ; t ≤ 0
1 − e−t/RC ; t ∈ (0, 1][e1/RC − 1
]e−t/RC ; t > 1
t10
1 − e−1/RC
1 − e−t/RC
vC(t) =
∫ ∞
−∞
h(σ)v(t − σ) dσ
[e1/RC − 1]e−t/RC
Chapter 3. Modelling, Differential Equations and System Properties – p.81/100

Convolution Example: RC Circuit (again)
The previous example can be repeated, but using thecommutative property:
∫ ∞
−∞
h(t − σ)v(σ) dσ =
∫ ∞
−∞
v(t − σ)h(σ) dσ
In this case, the impulse response remains static for allt as:
σ0
1RC h(σ) =
1
RCe−σ/RC
However, now v is flipped and shifted.
Chapter 3. Modelling, Differential Equations and System Properties – p.82/100
Convolution Example: RC Circuit (again)
Then we have:
y(t) = 0, t ≤ 0
σ01
v(t − σ), t = 0
h(σ)
y(t) =
∫ t
0
1
RCe−σ/RC dσ
= 1 − e−t/RC
0 < t ≤ 1
� �� �� �� �� �� �
� �� �� �� �� �� �
σ0
h(σ)
v(t − σ), t = 0.5
tt − 1 = −0.5
y(t) =
∫ t
t−1
1
RCe−σ/RC dσ
= e−t/RC[
e1/RC − 1]
t > 1 � � �� � �� � �� � �
σ
h(σ)v(t − σ), t > 1
t0 t − 1Chapter 3. Modelling, Differential Equations and System Properties – p.83/100
Convolution Example: RC Circuit (again)
Combining the 3 results, we obtain the same previoussolution:
vC(t) =
0 ; t ≤ 0
1 − e−t/RC ; t ∈ (0, 1][
e1/RC − 1]
e−t/RC ; t > 1
��������
��������
t10
1 − e−1/RC
1 − e−t/RC
vC(t) =
∫ ∞
−∞
h(σ)v(t − σ) dσ
[e1/RC − 1]e−t/RC
This verifies that it does not matter which of the twofunction in a convolution is flipped and shifted.
Chapter 3. Modelling, Differential Equations and System Properties – p.84/100

Convolution Example: Rectangular Signals
As a final more abstract example of convolution,suppose that u(σ) and h(σ) are rectangular signals:
u(σ)
1 σ
1
0
h(σ)
σ
1
0 0.5
In this case, if we elect to flip and slide h as h(t − σ):
h(t − σ)
t − 0.5 σ0 t
Chapter 3. Modelling, Differential Equations and System Properties – p.85/100
Convolution Example: Rectangular Signals
Then we have:
y(t) = 0, t ≥ 1.5
σ
u(σ)
0 1 1.5
h(t − σ), t = 1.5
y(t) =
∫ t−0.5
1
dσ
= σ∣∣∣
σ=t−0.5
σ=1= 1.5 − t
1 ≤ t < 1.5 �������� �∞−∞
h(t − σ)u(σ) dσ
σ
u(σ)
1.250.75
h(t − σ), t = 1.25
0
y(t) =
∫ t
t−0.5
dσ
= σ∣∣∣
σ=t−0.5
σ=t= 0.5
0.5 ≤ t < 1 � � �� � �� � �� � �� � �� � �� � �� � �
σ0
�∞−∞
h(t − σ)u(σ) dσu(σ)
h(t − σ), t = 0.75
0.750.25 1
Chapter 3. Modelling, Differential Equations and System Properties – p.86/100
Convolution Example: Rectangular Signals
Using similar arguments, if 0 ≤ t < 0.5:
y(t) =
∫ t
0
dσ = σ∣∣∣
σ=t
σ=0= t
And finally, if t ≤ 0, the product h(t − σ)u(σ) is zero forall σ and hence:
y(t) = 0 ; t < 0.
Combining all the results, we have the full solution:
y(t) =
���������������� �
0 ; t ≥ 1.5
1.5 − t ; t ∈ [1, 1.5)
0.5 ; t ∈ [0.5, 1)
t ; t ∈ [0, 0.5)
0 ; t < 0 t0.5 1.510
0.5
y(t) = �∞−∞
h(σ)u(t − σ) dσ
Chapter 3. Modelling, Differential Equations and System Properties – p.87/100

System Properties
Via electrical, mechanical and differential equationmodelling examples we have gradually introduced theidea of a system.
In a more abstract and general sense we have:
A system S is a governing influence whichregulates the relative behaviour of signals. Thenotation used to denote this regulation is thatthe nature of a signal y(t) relative to anothersignal u(t) is given as
y(t) = S[u](t).
Chapter 3. Modelling, Differential Equations and System Properties – p.88/100
System Properties
Linearity/Non-linearity:A system S is linear if, for any signals u(t), x(t) and
any constant numbers α, β:
S[αu + βx](t) = αS[u](t) + βS[x](t)
The systems expressible as convolution with animpulse response, S[u](t) = [h ~ u](t), are linear:
S[αu + βx](t) = [h ~ (αu + βx)](t) = α[h ~ u](t) + β[h ~ x](t)
= αS[u](t) + βS[x](t)
The system S[u](t) = u2(t) is non-linear since:
S[αu+βx](t) = (αu(t) + βx(t))2
= α2u2(t)+β2x2(t)+2αβu(t)x(t)
6= αu2(t) + βx2(t) = αS[u](t) + βS[x](t)
Chapter 3. Modelling, Differential Equations and System Properties – p.89/100
System Properties
Causality:A system is causal or non-anticipative if y(t?) = S[u](t?)
does not depend on future values of u(t) (i.e. t > t?).
All physical systems are causal (except in certainquantum phenomena).The linear system:
y(t) = [h ~ u](t) is causal ⇐⇒ h(t) = 0 for t < 0.
To see this, in
y(t?) = [h ~ u](t?) =
∫ ∞
−∞
h(σ)u(t? − σ) dσ.
note that if h(σ) 6= 0 for σ < 0, then y(t) depends onfuture values of u(t), because t? − σ > t?.
Chapter 3. Modelling, Differential Equations and System Properties – p.90/100

System Properties
Memory:A causal system S is memory-less if y(t?) = S[u](t?)
depends only on u(t) at t = t? (otherwise it has memory,since y(t?) is affected by prior values of u).
The simple amplifier system y(t) = S[u](t) = Ku(t) forsome K ∈ R is a memory-less system.The linear systemy(t) = [h ~ u](t) is memory-less ⇐⇒ h(t) = Kδ(t), K ∈ R.
To see this, in
y(t?) = [h ~ u](t?) =
∫ ∞
−∞
h(σ)u(t? − σ) dσ
note that, if h(σ?) 6= 0 for σ? > 0 then y(t?) depends onh(σ?)u(t? − σ?).
Chapter 3. Modelling, Differential Equations and System Properties – p.91/100
System Properties
Time Invariance:A system S is time-invariant if, a time time shifting in
the input generates a time shifting in the output:
x(t) = u(t − T ) ⇒ z(t) = S[x](t) = S[u](t − T ) = y(t − T )
The simple amplifier system:
y(t) = S[u](t) = Ku(t)
for some K ∈ R is time invariant. But, if the gain istime-varying:
y(t) = S[u](t) = | sinπt|u(t)
would be time-varying.
Chapter 3. Modelling, Differential Equations and System Properties – p.92/100
System Properties
System Dimension: A system described by an n-thorder differential equations can be represented as:
d
dtx(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
where x(t) is a state vector of dimension n. In thiscase, the system is said to have dimension n.
When n < ∞, the system is finite dimensional.For the non-linear case:
d
dtx(t) = f(x(t), u(t))
y(t) = g(x(t), u(t))
Again, the dimension is that of the vector x(t).Chapter 3. Modelling, Differential Equations and System Properties – p.93/100

System Properties
Stability:Intuitively, a system is stable if small perturbations
to it are only capable of producing small responses.
y(t) = CeA(t−t0)x0︸ ︷︷ ︸
Natural Response
+
∫ t
t0
g(t − σ)u(σ) dσ + Du(t)
︸ ︷︷ ︸
Forced Response
; g(t) , CeAtB.
Asymptotic Stability:It concerns on the natural response only.If we diagonalize the matrix A = S−1ΛS, then:
y(t) = CeA(t−t0)x0 = CS−1eΛ(t−t0)Sx0
where Λ contains the eigenvalues of A.
Chapter 3. Modelling, Differential Equations and System Properties – p.94/100
System Properties
Asymptotic Stability.If all the eigenvalues λ1, . . . , λn have negative real part:
eΛ(t−t0) =
eλ1(t−t0) 0 · · · 0
0 eλ2(t−t0) · · · 0...
. . ....
0 · · · 0 eλn(t−t0)
−−−→t→∞
0
Hence y(t) → 0, for any x0. Then we say that a linear,finite dimensional and time invariant system:
d
dtx(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
is asymptotically stable ⇐⇒ Re{λk} < 0 ; k = 1, . . . , n.Chapter 3. Modelling, Differential Equations and System Properties – p.95/100
System Properties
Bounded-Input Bounded-Output (BIBO) Stability:This involves the idea that the system response y(t) isbounded, for any bounded input u(t), regardless of theinitial conditions.
|u(t)| ≤ M < ∞ ⇒ |y(t)| =
∣∣∣∣
∫ ∞
−∞
h(t − σ)u(σ) dσ
∣∣∣∣
≤ M
∫ ∞
−∞
|h(t − σ)|dσ
And ‖h‖1 =
∫ ∞
−∞
|h(σ)|dσ =
∫ ∞
0
∣∣CeAtB + Dδ(t)
∣∣dt
=
∫ ∞
0
∣∣CS−1eΛt SB
∣∣ dt + D
≤n∑
k=1
|αk|
∫ ∞
0
∣∣eλkt
∣∣ dt + D
Chapter 3. Modelling, Differential Equations and System Properties – p.96/100

System Properties
Bounded-Input Bounded-Output (BIBO) Stability:Then, we have that a linear, finite dimensional and timeinvariant system:
d
dtx(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
is bounded-input bounded-output stable if all theeigenvalues λ1, · · · , λn of A, satisfy:
Re{λk} < 0; k = 1, 2, · · · , n.
However, the converse is not true.
Chapter 3. Modelling, Differential Equations and System Properties – p.97/100
System Properties
Stability: ExampleAgain, we consider the general 2nd order linear time invariantsystem:
d2
dt2y(t) + a1
d
dty(t) + a0 y(t) = b1
d
dtu(t) + b0 u(t)
In state-space representation:
A ,
λ1 + λ2 1
−λ1λ2 0
, B ,
b1
b0
, C ,[
1 0]
The eigenvalues of A are λ1,2 = −1
2
(
a1 ±√
a21 − 4a0
)
Thus, the nature of the response y(t) is completely captured by theterms eλ1t and eλ2t.
Chapter 3. Modelling, Differential Equations and System Properties – p.98/100
System Properties
Stability: ExampleWith x0 = 0, the response to u(t) = ε1(t) for t > 0 is:
y(t) =ε
λ1
(λ1b1 + b0
λ1 − λ2
)
(eλ1t − 1) +ε
λ2
(b0 + λ2b1
λ1 − λ2
)
(1 − eλ2t)
If u(t) = 0 and the initial condition is x0 = [x10 , x2
0]T , then:
y(t) =
(λ1x
20 + x1
0
λ2 − λ1
)
eλ1t +
(x1
0 + λ2x20
λ1 − λ2
)
eλ2t, t > 0
If λ1,2 = α ± jω, then eλ1,2t = eαt [cos ωt ± j sinωt].If α = Re{λ1,2} < 0, then eλ1,2t will tend to zero as t grows.If α > 0, then eλ1,2t will explode towards ∞ as t grows.
Therefore, the system is bounded-input bounded-output andasymptotically stable if Re{λ1,2} < 0.
Chapter 3. Modelling, Differential Equations and System Properties – p.99/100

System PropertiesNote that a system can be BIBO stable even if aneigenvalue violates the condition Re{λk} < 0.Example. Consider the case of:
d2
dt2y(t) +
d
dty(t) − 2 y(t) = b1
d
dtu(t) + b0 u(t)
The eigenvalues of the matrix A =[−1 12 0
]are λ1, λ2 = −2, 1, and
hence Re{λ2} = 1 > 0.However, the response to u(t) = ε1(t) (with x0 = 0) is:
y(t) =ε
λ1
(λ1b1 + b0
λ1 − λ2
)
(eλ1t−1)+ε
λ2
(b0 + λ2b1
λ1 − λ2
)
(1−eλ2t) ; t > 0
But if we choose b1 = 1 and b0 = −1, then
y(t) =ε
−2
(−2 + (−1)
−2 − 1
)
(e−2t−1)+ε
1
(−1 + 1
−2 − 1
)
(1−et) =ε
2(1−e−2t)
and thus the system is BIBO stable.
Chapter 3. Modelling, Differential Equations and System Properties – p.100/100