smart building smart grid - unina.it · pioneered by walter a. shewhart in the early 1920s w....
TRANSCRIPT
November 2011 Copyright Luh 1
Smart Building Smart Grid
Peter B. Luh
SNET Professor
Electrical and Computer Engineering
Univ. of Connecticut
http://www.engr.uconn.edu/msl/
November 2011 Copyright Luh 2 2
November 2011 Copyright Luh 3
Many parts of the world become Venice, Italy, willingly or not
3

4 4
Yes, but missing a major piece of the answer
What is that? November 2011 Copyright Luh
November 2011 Copyright Luh 5
Buildings, Yes, Buildings
5

November 2011 Copyright Luh 6
• Commercial and residential buildings are the basis of our social and economic infrastructure
• In the US, buildings are responsible for
38% of carbon dioxide emissions
71% of electricity consumption
39% of energy use
12% of water consumption
40% of non-industrial waste
• We spend 90% of our time indoors, and the indoor environment affects our health and productivity
Green, Secure, and Safe Buildings!!
7 7
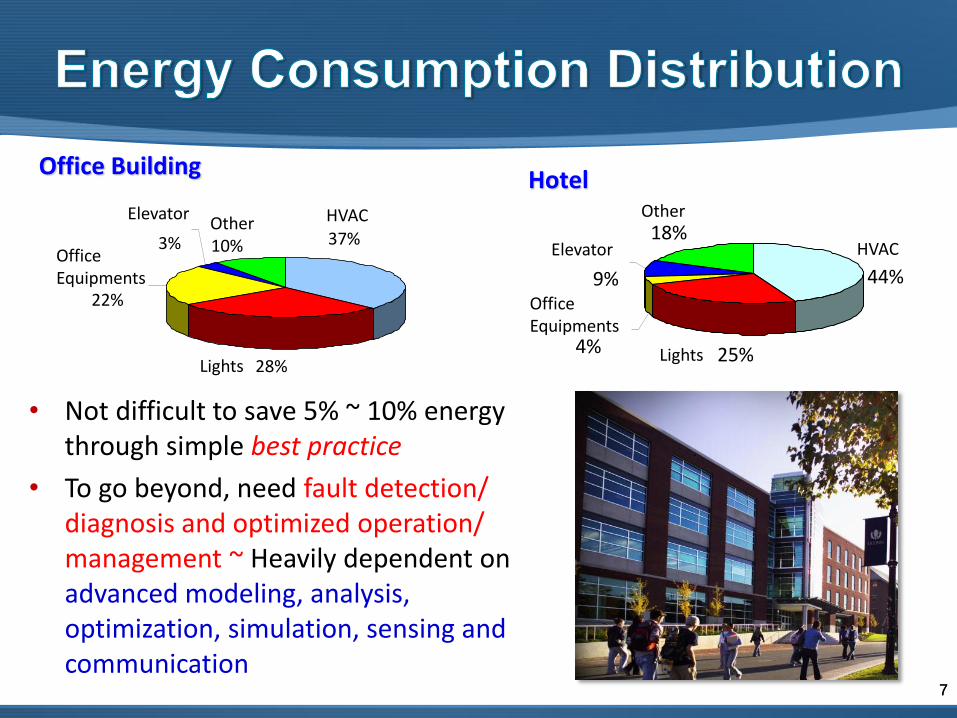
• Not difficult to save 5% ~ 10% energy through simple best practice
• To go beyond, need fault detection/ diagnosis and optimized operation/ management ~ Heavily dependent on advanced modeling, analysis, optimization, simulation, sensing and communication
Office Building
HVAC 37%
28%
Office Equipments
22%
Elevator
3% Other 10%
Lights
Hotel
44%
25% 4%
9%
18%
Lights
HVAC
Office Equipments
Elevator
Other

November 2011 Copyright Luh 8
9
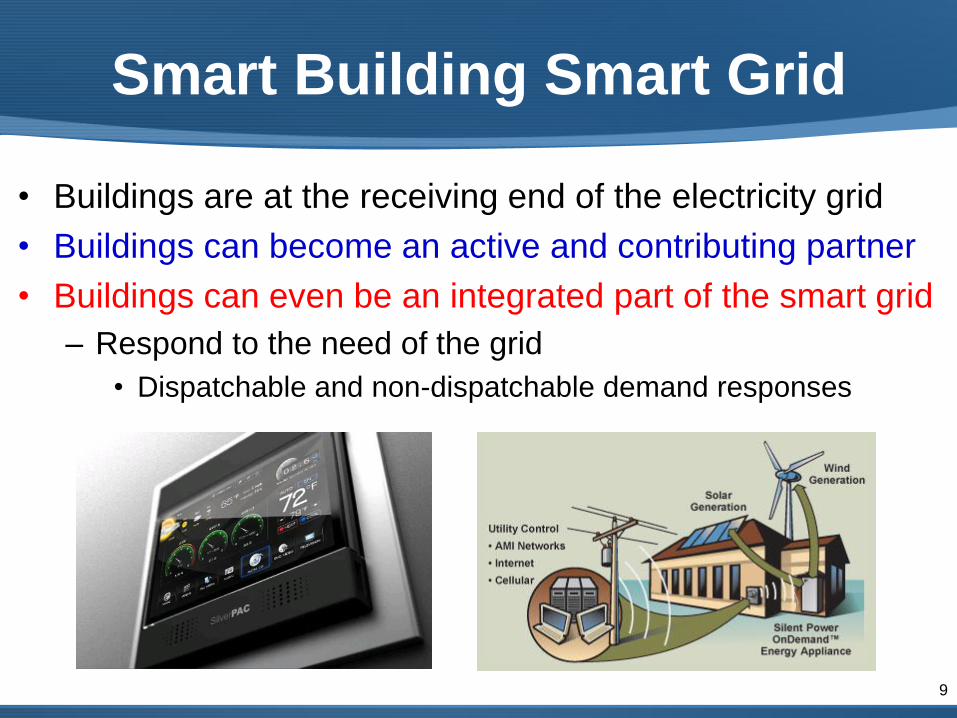
Smart Building Smart Grid
• Buildings are at the receiving end of the electricity grid
• Buildings can become an active and contributing partner
• Buildings can even be an integrated part of the smart grid
– Respond to the need of the grid
• Dispatchable and non-dispatchable demand responses

• Reduce electricity usage through fault detection,
diagnosis and optimized operation of HVAC and other
systems
• Provide infrastructure for plug-in hybrid cars and
distributed/renewable generation
• Microgrid – A new mode of power system operation
10

Actual utilization of coal fired electrical energy in China
Coal mining loss
Transmission & distribution loss Coal shipping loss
Thermal turbine loss
Actual utilization
70%
1% 1%
20% 8%
Magnifying effect
of saving energy
Courtesy of
Xiaohong
Guan,
CFINS,
Tsinghua U. 11

12 12
Smart Building
Smart Integration
Smart Grid
Temperature
Light
Sound
Motion
Sensing
Energy Management
Sensor Node Diagnosis
Report
Health Prognosis
Data Capture
Health Monitoring
Technology
• Sensor networks
• Communication
• Device integration
• Optimization
• Scheduling
• Cyber security
• Node placement
• Diagnosis
• Prognosis
November 2011 Copyright Luh 13
Conclusion
• Smart Building Smart Grid at UConn:
– A dynamic team of faculty, staff, industrial partners
– Sensor networks
– HVAC FDD and optimized operations
– Coordination of lights, blinds and HVAC under
dynamic pricing
– 3D visualization with augmented reality
– Wind integration with penetration 20% or more
– Solar voltaic integration

November 2011 Copyright Luh 14
Conclusion
– Load forecast in the era of smart grid
• Won UConn School of Engineering
competition of $170k equipment
– A test bed: UConn’s Information Technology
Engineering Building under retro-commissioning
– A donation of Savant building automation system
– Another test bed: The new Engineering building
to be designed
• A meaningful and promising research area
1
Building Energy Doctor:
SPC and Kalman Filter-based Fault Detection
Biao Suna, Peter Luha, b,c, Zheng O’Neillc, and Fangting Songd
aCenter for Intelligent and Networked Systems (CFINS), Tsinghua University, China
bDepartment of Electrical and Computer Engineering, University of Connecticut, USA cUnited Technology Research Center, USA
dUnited Technology Research Center, China
Proceedings of the 2011 IEEE Conference on Automation Science and Engineering,
Trieste, Italy, August 2011, pp. 333-340. A revised version will be submitted for journal
review soon

Background and Objective
The problem: Simple and robust fault detection method
at the system level for HVACs with potential for large-
scale implementation
Is this problem important?
Buildings account for nearly 40% of global energy
consumption and 21% of greenhouse gas emissions
HVAC consumes up to 40% of energy costs of buildings
HVAC receives most complaints from building tenants
(elevators ranked the remote second)
The research represents a major opportunity for a
greener world and happier tenants
2

An HVAC system HVAC systems usually consist of multiple interconnected
subsystems – AHUs (Air Handling Units), chillers, cooling
towers, pumps, ducts, etc.
3
Cooling towers
Chillers
AHUs
Rooms
Pump
Fan
Supply airReturn airFresh airExhaust air
Supply chilled waterReturn chilled waterSupply cooling waterReturn cooling water
AHU: Use chilled water to cool and dehumidify return air and fresh air
Chiller: Produce chilled water for AHUs by transferring excess heat from
chilled water to cooling water
Cooling tower: Transfer excess heat from cooling water to outside air

Difficulties of fault detection
HVAC systems are large in scale, with many coupling
subsystems, could be building/equipment specific, and
with major uncertainties
4
Large in scale
Many coupling
subsystems
Building/equip.
specific
Uncertainties
• Fault detection methods should be fast and sensitive, e.g., only 1 of the 4 chillers has a fault
• Fault detection methods should be generic for HVACs with different manufacturers or models
• Do not need long training times for different buildings
• Effects of faults might propagate from one subsystem to another
• Fault detection methods should be robust (high detection rate and low false alarm rate) to the uncertain weather and cooling load
Difficulties of fault detection
Difficult to localize faults
High false alarm rate
5
Many device-level fault
detection but not system-
level (including buildings)
fault detection
Many black-box models (not
robust) and empirical studies
(not based on hard science)
Many focused studies on
individual buildings with
questionable scalability
Need a lot of data and a
long time to train models
Not robust to uncertain
weather, cooling load, etc.

Approach
Our Approach: Develop gray-box model-based and data-
driven methods with insights and understanding for robust
system-level fault detection
A novel integration of 3 simple and proven techniques
Statistical Process Control – Measuring and analyzing
variations
Kalman filters – Providing predictions and adaptive
thresholds based on gray-box models of subsystems for
robustness
System analysis – Analyzing fault propagations across
subsystems through "coupling variables"
Example: Chiller fault propagating to cooling towers
6
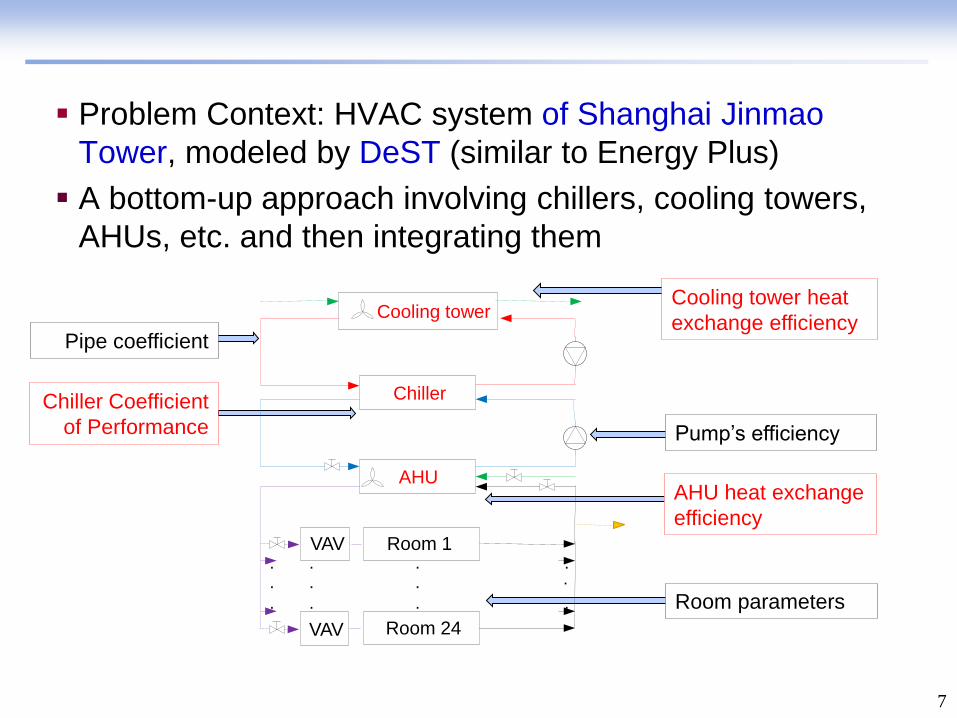
Problem Context: HVAC system of Shanghai Jinmao
Tower, modeled by DeST (similar to Energy Plus)
A bottom-up approach involving chillers, cooling towers,
AHUs, etc. and then integrating them
7
AHU heat exchange
efficiency
Pump’s efficiency
Cooling tower heat
exchange efficiency
Chiller Coefficient
of Performance
Pipe coefficient
Room parameters
Cooling tower
Chiller
AHU
Room 1 . .
.
.
.
.
.
.
.
.
.
.
VAV
Room 24 VAV

8
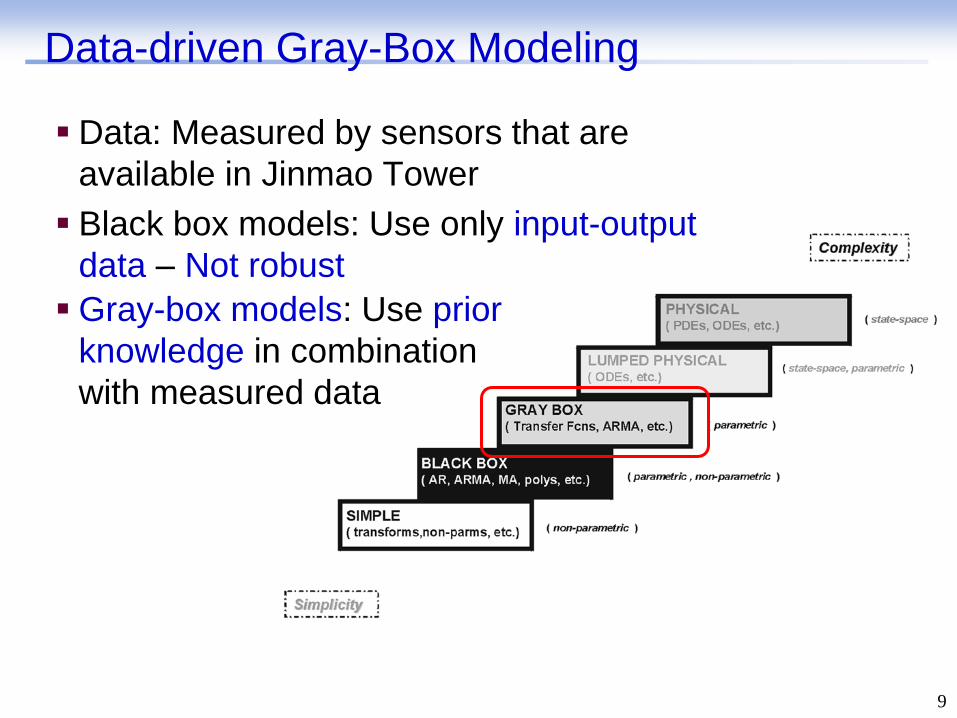
Data-driven Gray-Box Modeling
9
Data: Measured by sensors that are
available in Jinmao Tower
Black box models: Use only input-output
data – Not robust
Gray-box models: Use prior
knowledge in combination
with measured data

Gray-Box Modeling of Chillers
Reddy, et al., 2003
COP: Coefficient of Performance = qch/P (electrical power)
a1 = DS, internal entropy production rate
a2 = qleak, the rate of heat losses or gains
a3 = R, heat exchanger thermal resistance
The state: xk = [a1k, a2k, a3k]T, and xk+1 = xk + wk
Measurement: Left hand side of the above equation
Not a standard heat exchange model for chillers
10
cdi
ch
chcdi
chrcdi
ch
chr
cdi
chr
t
LCOP/a
Lt
tta
L
ta
t
t
COP
1111
1321
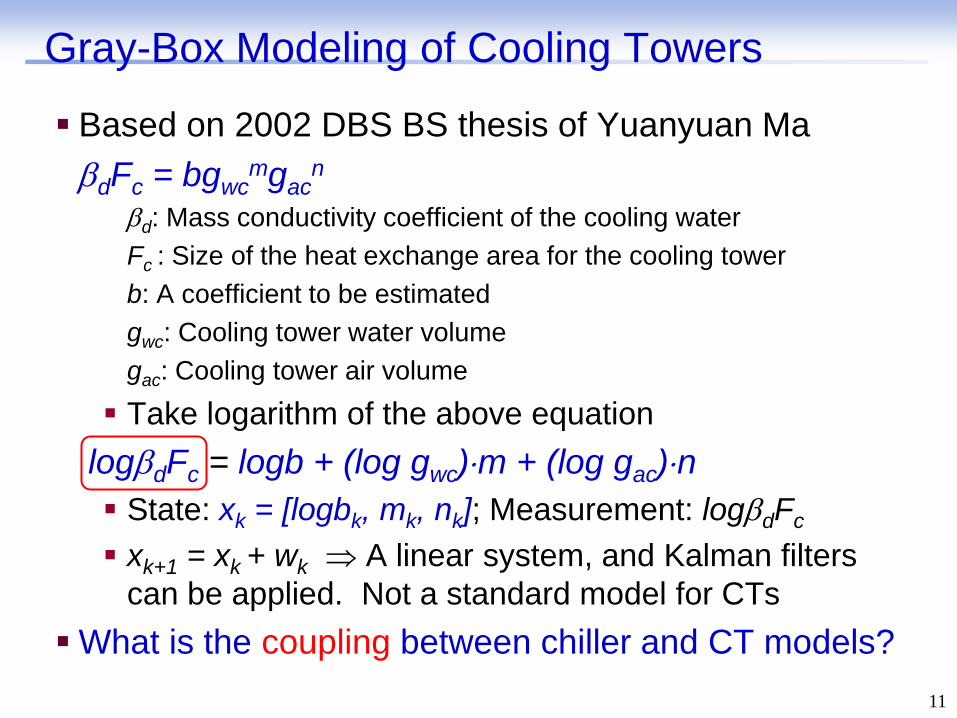
Gray-Box Modeling of Cooling Towers
Based on 2002 DBS BS thesis of Yuanyuan Ma
dFc = bgwcmgac
n d: Mass conductivity coefficient of the cooling water
Fc : Size of the heat exchange area for the cooling tower
b: A coefficient to be estimated
gwc: Cooling tower water volume
gac: Cooling tower air volume
Take logarithm of the above equation
logdFc = logb + (log gwc)m + (log gac)n
State: xk = [logbk, mk, nk]; Measurement: logdFc
xk+1 = xk + wk A linear system, and Kalman filters
can be applied. Not a standard model for CTs
What is the coupling between chiller and CT models?
11
Statistical Process Control (SPC)
Application of statistical methods to the monitoring and
control of processes
Pioneered by Walter A. Shewhart in the early 1920s
W. Edwards Deming applied it during WW II
He later introduced it to Japanese industry
12
Shewhart Deming
13
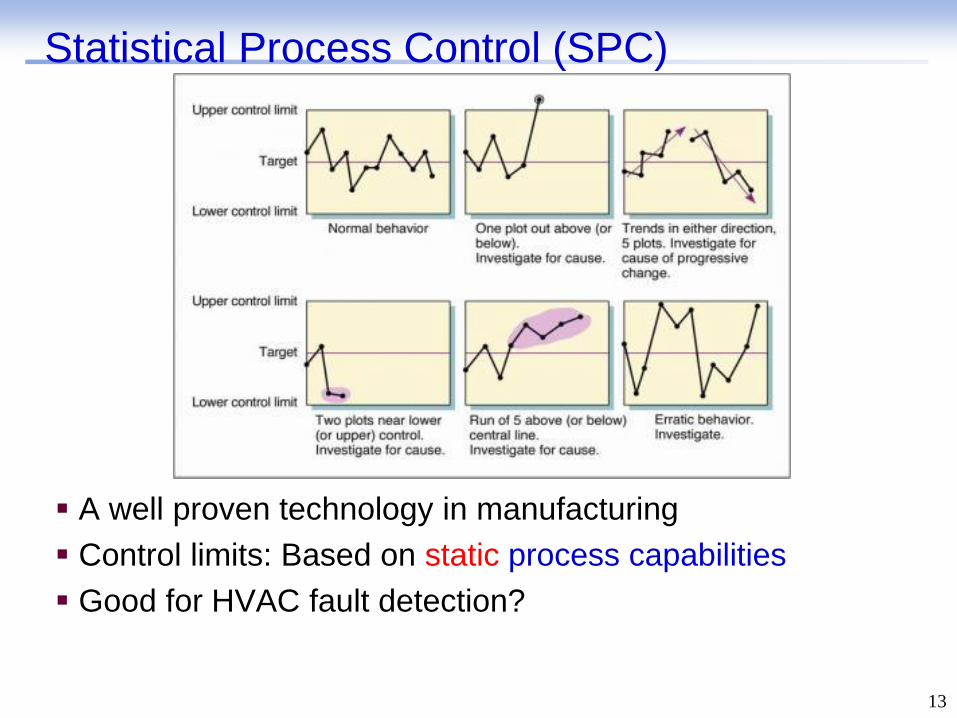
A well proven technology in manufacturing
Control limits: Based on static process capabilities
Good for HVAC fault detection?
Statistical Process Control (SPC)
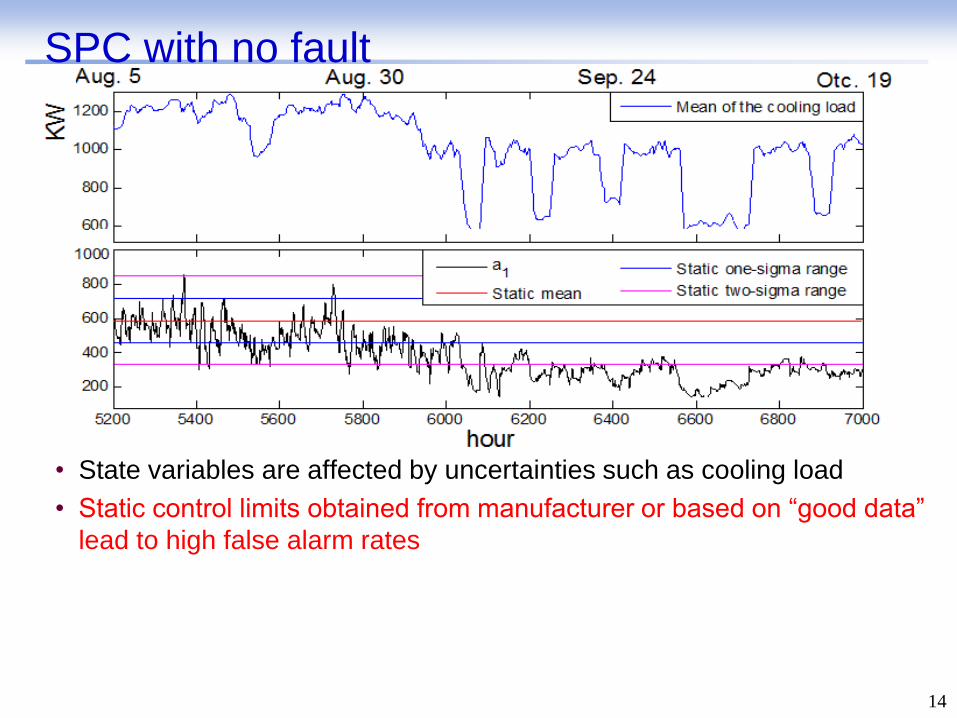
SPC with no fault
14
• State variables are affected by uncertainties such as cooling load
• Static control limits obtained from manufacturer or based on “good data”
lead to high false alarm rates

Kalman Filtering
A method to estimate the state of a process,
minimizing the mean of the squared error xk+1 = Axk + Buk + wk, p(w) ~ N(0, Q)
zk = Hxk + vk, p(v) ~ N(0, R)
15
National Medal of Science, 2009 –
from Apollo missions to GPS
Rudolf E. Kalman,
1960 Measurement update:
Bayes rule
xk+1|k+1 xk|k
Time update:
Linear systems
xk+1|k
k k+1

16
A systematic way to derive state covariance matrices and
therefore standard deviations with minimal MSE
Our idea on fault detection applications – Use Kalman
filters to predict system states and set adaptive SPC
control limits

Our Idea on Fault Detection
Adaptive control limits: 1-sigma and 2-sigma ranges
Two-sigma range: Mean ± (2×standard deviation)
How to set the mean, for example, of a1?
The mean should be the average of a1 when there is no fault. It is to
be used as a baseline for fault detection
It should be adaptively adjusted with uncertainties, e.g., cooling load
Our idea: The mean is adaptively adjusted as the average over the
past K (e.g., 24) hours
– Two sigma range (a1 in the chiller model as an example)
An SPC rule: A fault is detected if n back-to-back points of a
parameter fall outside the two-sigma range
17
1, 1, 1, 1, 1, 1,
1
1ˆ2 , 2 ,
k
k k k k k i
i k K
where aK
, same for 1,k
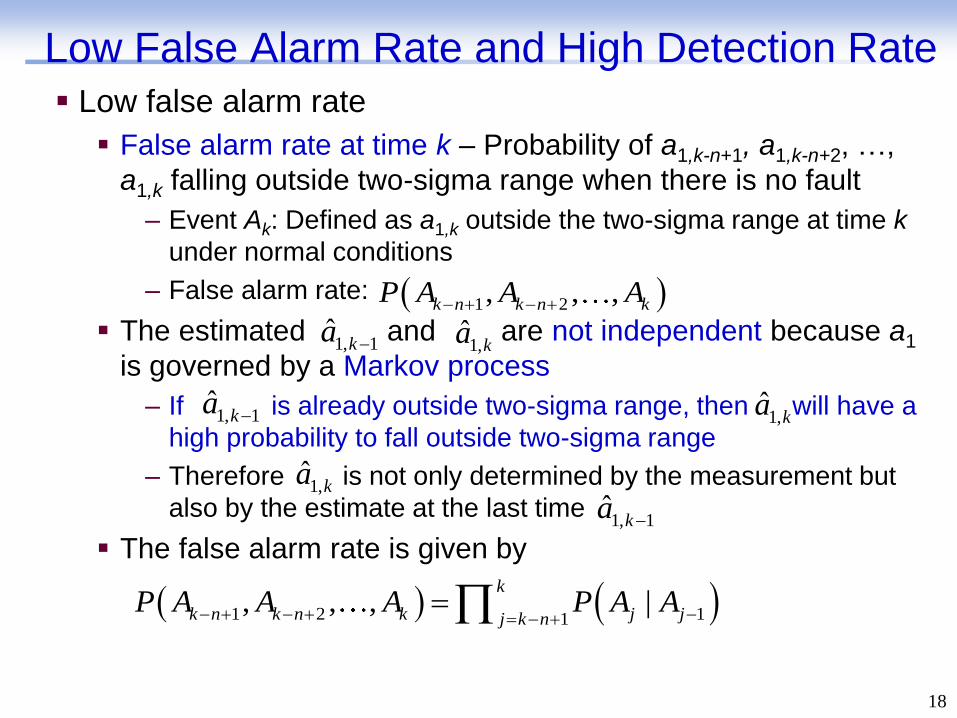
Low False Alarm Rate and High Detection Rate Low false alarm rate
False alarm rate at time k – Probability of a1,k-n+1, a1,k-n+2, …,
a1,k falling outside two-sigma range when there is no fault
– Event Ak: Defined as a1,k outside the two-sigma range at time k
under normal conditions
– False alarm rate:
The estimated and are not independent because a1
is governed by a Markov process
– If is already outside two-sigma range, then will have a
high probability to fall outside two-sigma range
– Therefore is not only determined by the measurement but
also by the estimate at the last time
The false alarm rate is given by
18
1 2, , ,k n k n kP A A A
1, 1ˆ
ka 1,ˆ
ka
1 2 11, , , |
k
k n k n k j jj k nP A A A P A A
1, 1ˆ
ka 1,ˆ
ka
1,ˆ
ka
1, 1ˆ
ka

Low False Alarm Rate and High Detection Rate Low false alarm rate
Need to find how is affected by
– By substituting the state equation into estimation, we have
– Assuming KjH is a diagonal matrix for simplicity, is given by
Assuming m1 = 0.5, false alarm rate is approximately given by
19
n back-to-back
points
False alarm rate
(Two-sigma range)
False alarm rate
(One-sigma range)
1 6.71% 33.45%
2 1.50% 15.50%
3 0.34% 7.41%
4 0.08% 3.61%
1ˆ ˆ1j j j j j j jx K H x K Hx K Hv
1,ˆ
ja1, 1ˆ
ja
1,ˆ
ja
1, 1, 1, 1 1, 1, 1, 1ˆ ˆ1j j j j j j ja m a m a m v

Low False Alarm Rate and High Detection Rate High detection rate
Detection rate can be calculated similarly as false alarm rate
Detection rate is affected by the magnitude of a fault
– Assuming a sudden fault at time k causes a1 to change form 1,k
to (1,k + s1, k )
Simulation results are good
20
SPC rule:
• Three back-to-back points
outside two-sigma range
• K = 24 to calculate the
means
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1
Hours delayed for fault detection
Dete
ction r
ate
s=3
s=4
s=5
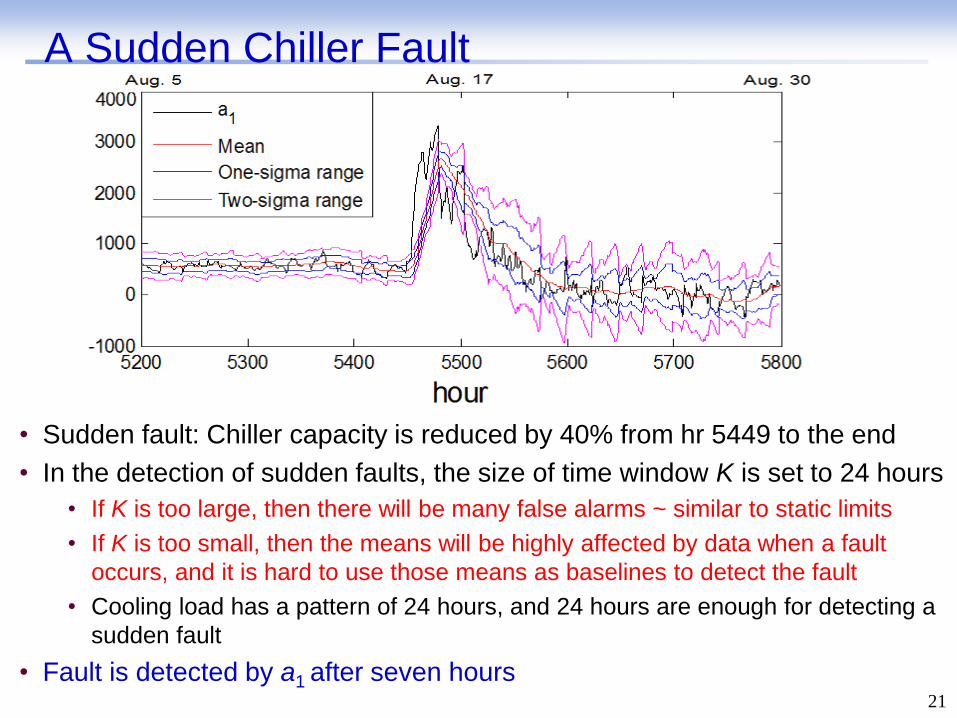
A Sudden Chiller Fault
21
• Sudden fault: Chiller capacity is reduced by 40% from hr 5449 to the end
• In the detection of sudden faults, the size of time window K is set to 24 hours
• If K is too large, then there will be many false alarms ~ similar to static limits
• If K is too small, then the means will be highly affected by data when a fault
occurs, and it is hard to use those means as baselines to detect the fault
• Cooling load has a pattern of 24 hours, and 24 hours are enough for detecting a
sudden fault
• Fault is detected by a1 after seven hours

Means should be
averaged over 30 days to
reduce the impact of false
data on the baseline.
The fault is detected after
12 days and 4 hours
A Gradual Chiller Fault
22
• Gradual fault: Chiller capacity is gradually reduced by 40% over a month from hr 5449
• How to select K to detect gradual fault?
• K should be determined based on the no. of hours the fault lasts and its
magnitude to keep a balance between quick detection and low false alarm rates
• For the above-mentioned gradual fault, K is set to 30 days
Means are averaged over
the past 24 hours.
The fault is not detected
because means are
affected too much by the
false data and cannot be
used as baseline
Fault detected False alarms
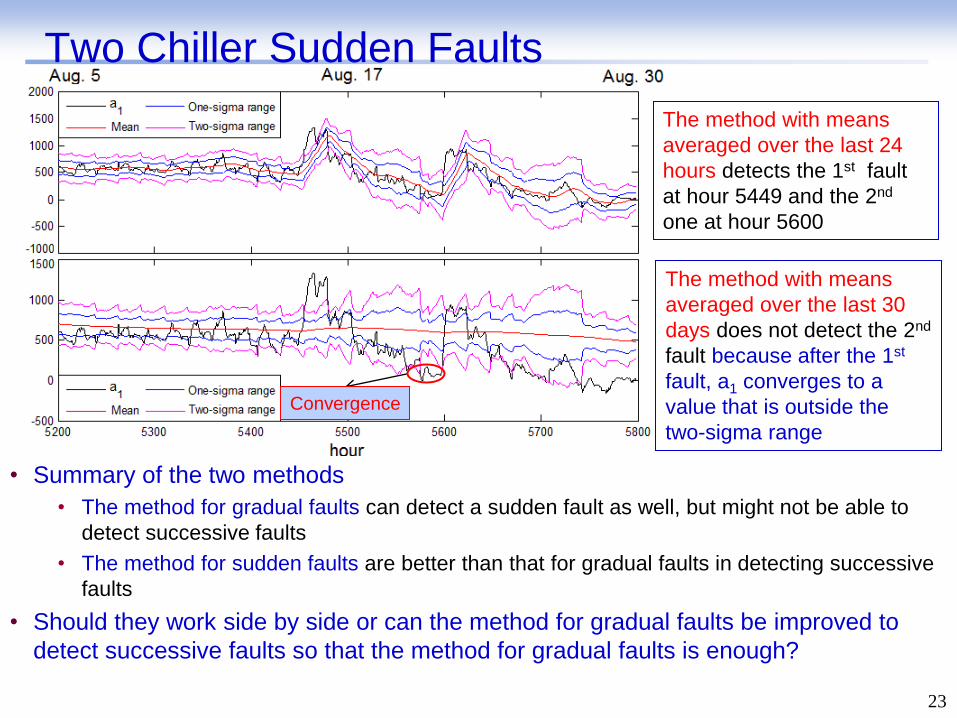
Two Chiller Sudden Faults
23
• Summary of the two methods
• The method for gradual faults can detect a sudden fault as well, but might not be able to
detect successive faults
• The method for sudden faults are better than that for gradual faults in detecting successive
faults
• Should they work side by side or can the method for gradual faults be improved to
detect successive faults so that the method for gradual faults is enough?
The method with means
averaged over the last 24
hours detects the 1st fault
at hour 5449 and the 2nd
one at hour 5600
The method with means
averaged over the last 30
days does not detect the 2nd
fault because after the 1st
fault, a1 converges to a
value that is outside the
two-sigma range
Convergence

Improve the SPC rule for successive faults
24
Key idea: Adaptively adjust the size of the time window, K, to
detect successive faults
1. Set K to Kini for initialization based on the number of hours gradual
faults last and the magnitude of faults
2. If a fault is detected, K is set to 24 so that the means can be
adjusted quickly and converged inside the two-sigma range as
soon as possible
3. After converges inside the two-sigma range at time kc, K at time
k is set to the minimal value of (k-kc) and Kini to detect the 2nd fault
1,ˆ
ka
1,ˆ
ka
5200 5300 5400 5500 5600 5700 5800-500
0
500
1000
1500
2000
hour
a
1
Mean
One-sigma range
Two-sigma range
2nd fault detected
Step 2 Step 1 Step 3 Step 2 Step 3
Fault Propagation: System-Level Fault Detection
The effects of a fault may propagate from one device
to another. This, however, doesn’t mean that other
devices are faulty too
Straightforward ideas for system-level detection
Combine gray-box models of subsystems to form an
“combined model”
Estimate the combined state by Kalman filters
Perform Statistical Process Control
Better ideas?
What are the couplings among subsystems? Then?
Can the SPC-KF fault detection framework for devices
be extended? With or without a major increase in
complexity?
25

System-Level fault detection via SPC and KF
In previous models, flows of water and air are
parameters as opposed to input, output or state
Propagation of effects from one device to another should
not directly affect the state of the latter one
“Coupling variables” are identified for system-level fault
detection
26
Chiller Fault: CT load;
CT mixed water inlet
temperature -
“Computable” based
on chiller variables
and “measurable”
within CTs
Cooling tower
Chiller
AHU
Room 1 . .
.
.
.
.
.
.
.
.
.
.
VAV
Room 24 VAV
In view of no direct coupling among gray-box models,
the overall state can be estimated by using Kalman
filters for individual subsystems developed before
No need to create a new and large Kalman filter
SPC is performed on state variables and the
difference between measured and computed coupling
variables (errors)
Standard deviations for errors can be derived for SPC
use, and the extension is with simplicity and scalability
By examining the combined system, we can tell if
there is a fault in a device or it is just the effects of a
fault propagated from somewhere else
27
28
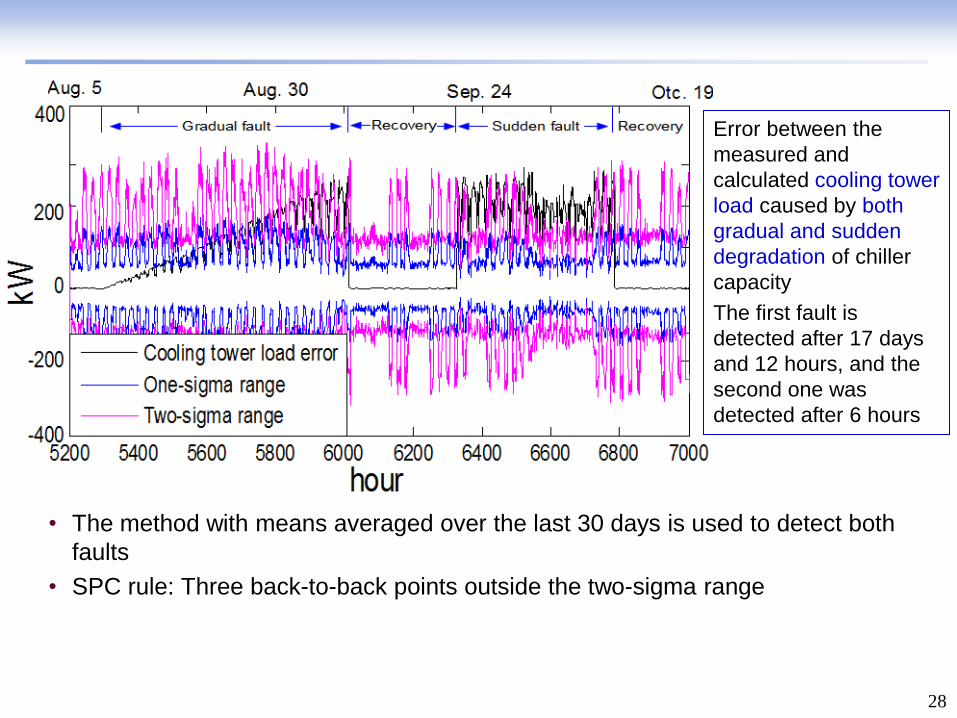
• The method with means averaged over the last 30 days is used to detect both
faults
• SPC rule: Three back-to-back points outside the two-sigma range
Error between the
measured and
calculated cooling tower
load caused by both
gradual and sudden
degradation of chiller
capacity
The first fault is
detected after 17 days
and 12 hours, and the
second one was
detected after 6 hours

Conclusion
The method is simple, and is based on a novel
combination of proven techniques of SPC, KF, and
system concepts
Results are promising:
Detect both sudden failure and gradual degradation with short
time delays
Differentiate failures or their effects propagated from elsewhere
Detect both device fault and sensor fault
The method is generic and scalable, and has many
promising applications
Next: Test on a real building at UConn’s Information
Technology Engineering Building
29

Thank you
30