this document is the property of eads launch vehicles. it shall not be communicated to third parties...
TRANSCRIPT

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-1
LAUNCH VEHICLESSystems, Design & Tests Directorate
Vincent SAILLOUR MSG Conference 2001
23-1

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-2
Generic Toolbox for Interoperable SystemsGTI6 - Agenda
Background GTI6 Architecture GTI6 Applications ATV Spacecraft Validation ATV Group Training & Mission
Rehearsal Conclusions and perspectives

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-3
GTI6 - Background
EADS LAUNCH VEHICLES is prime contractor or industrial architect for large and complex systems such as: ARIANE 4 & 5 Launchers, French submarine nuclear missiles, Automatic Transfer Vehicle (ATV),...
Simulation paradigms apply at all steps of these systems lifecycle: requirement, design, development, AIT, qualification, mission rehearsal, training,...
EADS-LV business is geographically distributed
Several R&D on how Distributed Simulation Technology could support our activities: DIS-RVM (ESA-ESTEC TRP), EDISON, DSE (European Union ESPRIT-IST programs)
www.GTI6.com
This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-4
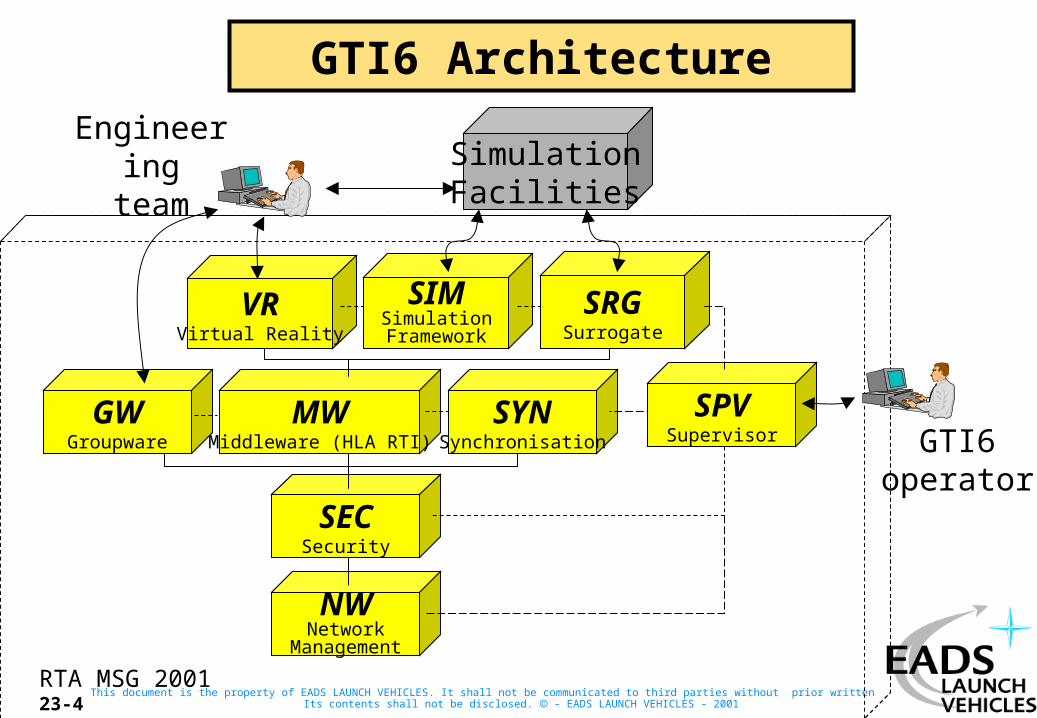
GTI6 Architecture
Engineeringteam
GTI6operator
SIMSimulationFramework
SRGSurrogate
MWMiddleware (HLA RTI)
GWGroupware
SYNSynchronisation
NWNetwork
Management
SPVSupervisor
SECSecurity
VRVirtual Reality
SimulationFacilities

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-5
NW
SEC
SPV
SYN
MW
GW
SIM
VR
SRG
Systemvalidation
Missiontraining
Controlcommand
Engineering
Components
Application
GTI6 Applications - Components

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-6
Automatic Transfer Vehicle (ATV)
Three main missions:– Deliver a payload– Reboost the station– Take away the waste
ESA project–1st launch April 2004 –PFM +9 FM up to 2013
Main characteristics–Total mass ~ 20t –Payload ~7t

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-7
ATV Flight Phases

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-8
Approach corridor
Waitingpoints S2S3Vbar
Final Translation
Closing Homing
S1
RbarAll figures are indicative only, and shall not be used without verification
KOZ Approach ellipsoid
S4S5[40] [250m] [2500 meters]
ATV Rendez Vous Approach

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-9
Vbar
Rbar
Approach Corridor w.r.t Docking Port
KOZKeep Out Zone
S3S4
S5[250 m][40 m]
S3 : ATV waits for authorization to enter KOZ
S4 : Acquisition of relative attitude of ATV
S5 : Docking port
Waiting Points
Possible Trajectory
[200 m]
10 o
Figure not drawn to scale
ATV Rendez Vous Corridor

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-10
Parameter Specified setRelative longitudinal closing velocity 0.05 - 0.10 m/sRelative lateral velocity < 0.02 m/sAngular rate < 0.05 °/s (roll)
< 0.05 °/s (pitch)< 0.05 °/s (yaw)
Roll misalignment < 2.0 °Angular misalignment of longitudinal axes < 1.0 ° (pitch)
< 1.0 ° (yaw)Misalignment of docking frame centres < 0.10 m
The docking tolerances are expressed at 1st contact between the head of the ATV probe and the ISS drogue
Source : SL/V n°2157and SSP 50129 03/03/97 IRD International Space Station to ATV
ATV Docking Tolerances

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-11
Spacecraft Validation with ‘Hardware-In-the-Loop’
Real spacecraft, integrated in France
Real motion systemfor space proximity operations, in Germany
Close-loop & real-time
flight simulationof the spacecraft

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-12
Close loop test
ATVtrajectory
RVS mounted on EPOS
Thrustercommands
2
4
7
FSF
FTC
RVS
EPOS3
1
5
6
GNCcalculations
EPOScommand EPOS
movement
RVSmovement
RVSmeasurement

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-13
EPOSEPOS
Command / Control
ATV-FSFATV-FSF
Command / Control
ATV-FSFATV-FSF
FTCFTC
SimulatorsSimulators
GPSGPS PDEPDE
Front-endsFront-ends
Chaser Chaser Motion Motion DeviceDevice
EPOSEPOS
Illumination Illumination SystemSystem
Target Target Motion Motion DeviceDevice
ReflectorsReflectors
ATVATV ISSISS
RVSRVS
Ethernet
MIL-1553
SpeechVision
Gesture
Centralized Simulation Facility

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-14
EPOSEPOS
Command / Control
ATV-FSFATV-FSF
Command / Control
ATV-FSFATV-FSF
FTCFTC
SimulatorsSimulators
GPSGPS PDEPDE
Front-endsFront-ends
Chaser Chaser Motion Motion DeviceDevice
EPOSEPOS
Illumination Illumination SystemSystem
Target Target Motion Motion DeviceDevice
ReflectorsReflectors
ATVATV ISSISS
RVSRVS
Ethernet
MIL-1553
France
Ethernet
MIL-1553
RVSsurrogate
EPOSsurrogate
FTCsurrogate
FSFsurrogate
EDISONkernel
SpeechVisionGesture
SpeechVisionGesture
EDISONoperator
Distributed Simulation FacilityGermany

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-15
Lessons learned: Technical Feasibility
The end-to-end delay induced by the distribution is around 50ms:
20 ms for the WAN due to ATM high quality 10 ms transfer time for a typical 450 bytes long user data running on a 500 Kbps VPN 20 ms for the middleware (RTI+surrogate)
If necessary, this delay could be compensated by Dead Reckoning algorithm.
Globally EDISON is in line with the expectations and can be used for ATV validation process
This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-16
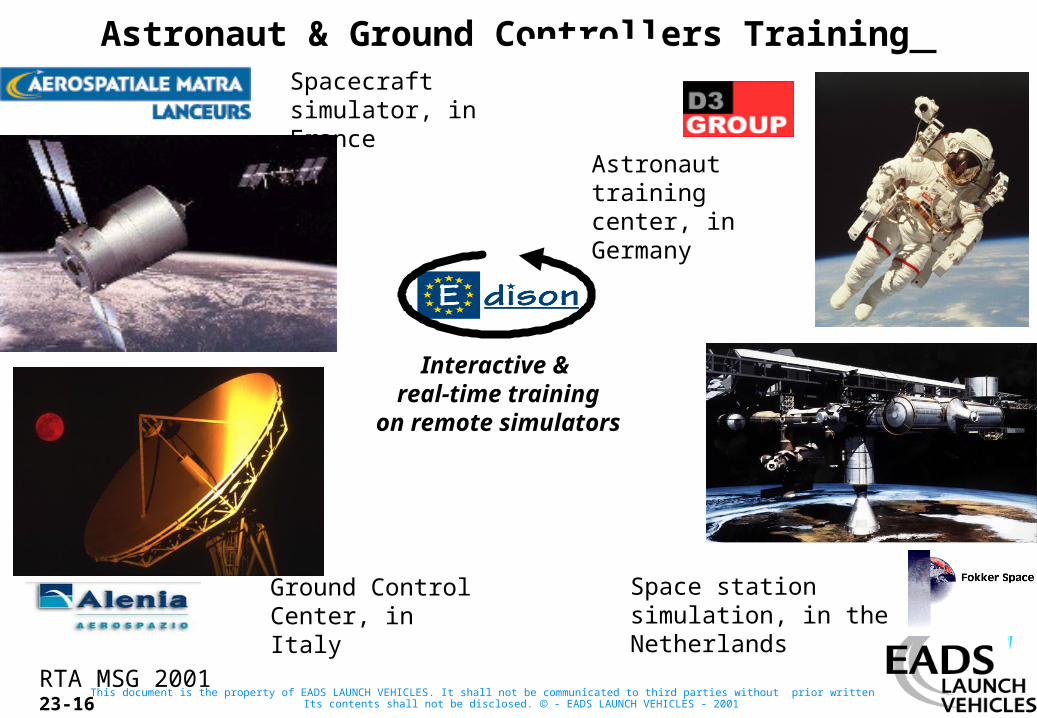
Spacecraft simulator, in France
Astronaut training center, in Germany
Interactive & real-time training
on remote simulators
Ground Control Center, in Italy
Space station simulation, in the Netherlands
Astronaut & Ground Controllers Training

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-17
Objective: To evaluate possibility to perform mission rehearsal when several distributed sites are involved and their correct interactions are critical for mission rehearsal
Scenario: Implement the interactions between all ground control segments (SSCC-Houston
and MCC-Moscow, ATV-CC-Toulouse) involved in mission operations and the ISS crew
Both ISS Crew and ATV controllers can remotely control ATV using a similar human interface as Soyuz and Progress (joysticks and GUI) which is, however, not any more in line with the current ATV baseline
During the final approach several contingency situations (RVS failure, Space-Ground TV-downlink failure) will be introduced by the master training instructor using FM GUI to check operators skill to work together in such situations
ATV Group Training & Mission Rehearsal

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-18
Run OT1: Reference case with only initial test of manual mode at 250 m from the ISS by both ATV-CC and Crew
Run OT2: ATV RVS failure at 15 m. from ISS RVS failure not detected by ATV FDIR subsystem ATV-CC operators detect the failure using telemetry data ATV-CC switches ATV GNC to Manual Control Mode ISS crew continues approach in manual mode and docks ATV to ISS
Run OT3: TV link shut-down at 15 m. from ISS MCC issues a command to ATV-CC to stop the approach and maintain station
keeping in manual mode until crew takes over the control ATV-CC switches ATV GNC to Manual Control Mode and controls it by means of
TM ISS crew resumes the approach in manual mode and docks ATV to ISS
Mission Rehearsal & Training :
Tasks actually performed

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-19
Mission Rehearsal & Training : The HLA Federation
FederationM anager
O n-boardcosmonaut
A TVteleoperation
3D sticksG U I, 3D graphics and H U D
A TVcontroller
recoveryprocedures
keyboardG U I, 2D -3D graphics
contingencysituations
R TI R TI R TI R TI
R TI
A TVmodel
ISSmodel
A TV -C Cmodel
M C Cmodel
W A N (ISD N or A TM )
Simulation supervision
Control
Introduction ofcontingencies
A TV +ISSmonitoring
M CCcontroller

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-20
Run OT1 demonstrates that ATV maneuverability and controllability in the manual mode are acceptable: both in case when ATV was controlled from ground and from onboard
the ISS; latency compensation was sufficient Smooth transition from automatic mode to manual and back is ensured
by the ATV GNC subsystem Run OT2 additionally demonstrates effectiveness of cooperative work of
different groups of operators Ground controllers have quickly detected the RVS failure ISS crew completed the approach in the manual control mode
Run OT3 additionally demonstrates effectiveness of implementation of the HLA ownership transfer functionality between different control posts
Mission Rehearsal & Training :
Results

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-21
Human operators controlling ATV did not notice any differences as compared with a centralised configuration. The ATV is manually controllable all over its Final Translation reference trajectory
Distributed simulation using HLA provides a good opportunity for remote control of vehicles: e.g. even during the last 3-4 months before the flight when they are not any more authorised to travel, the astronauts could receive an adequate training on ATV control and monitoring its approach from a remote locations (USA, Russia,…)
Distributed simulation using HLA appears to be a good solution for interactions such as “trainee - instructor” and “crew - ground controllers”
From the cost point of view, implementation of a distributed simulation system could help save considerable budget by reducing amount of hard- and software to be exchanged between partners
Mission Rehearsal & Training :
Lessons learned

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-22
GTI6: Conclusions and perspectives
EADS-LV started to experiment distributed simulation technology 6 years ago according to its military activities
As this technology can also benefit to civil activities EADS-LV conducts several projects sponsored by ESA-ESTEC (e.g. DIS-RVM), European Communities (e.g. EDISON, DSE) and French RNRT (e.g. @IRS) to further experiment and evaluate distributed simulation technology
The practical experience gained has been progressively capitalized in what we call GTI-6 which has started to be operationally deployed for EADS-LV programs, and is also becoming available outside EADS Group
www.GTI6.com

This document is the property of EADS LAUNCH VEHICLES. It shall not be communicated to third parties without prior written agreement .Its contents shall not be disclosed. - EADS LAUNCH VEHICLES - 2001
RTA MSG 200123-23