uav/uas navigation und steuerung (control) - navka flight...
TRANSCRIPT

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
UAV/UAS Navigation und Steuerung (Control)
- NAVKA Flight Controls FC4 and FC6 -
Prof. Dr.-Ing. Reiner Jäger
Hochschule Karlsruhe Technik und Wirtschaft (HSKA) - University Applied Sciences
Faculty for Informationmanagement and Media (IMM)
Head „Labor für GNSS & Navigation“ and Projectleader Inst. for Applied Research (IAF)
RaD
www.dfhbf.de, www.goca.info, www.monika.ag , www.geozilla.de
www.moldpos.eu, www.navka.de
Email: [email protected]
Honorary Professor Siberian State University of Geosystems and Technologies

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA 2
GNSS / MEMS / Optics Algorithms, Software, Hardware and Systems for Out-/Indoor Navigation (People, Vehicles, Goods) and Georeferencing
with distributed Sensors and Platforms
MOEMS
RaD Project
www.navka.de
Tbzeb
byeb
bxeb
eeeeeeeeeeee z y xy p r zyxz y xy s||||||,,,
= bz,eb
by,eb
bx,eb
bz,eb
by,eb
bx,eb
eeeeeeeeeeee | |z y x||y p r| zyx|z y x)t( = y

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Navigation with Distributed Sensors & Platforms (NAVKA-Concept)

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
ZIM-Netzwerk „Hochpräzise Echtzeitnavigation B.W. „ - Initial Meeting 03 / 2018)
http://www.navka.de/index.php/de/weitere-projekte/hochpraezise-echtzeignavigation-b-w

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Purpose and Hardware
Flight Control System- Hardware, Sensors, Navigationunit
- Navigation&Control-Loop
- Application

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
– Flight Control and Navigation
– Manned Multicopter (Volocopter)
– Scalable UAV
NAVKA (www.navka.de) Flight Control Developments

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Purpose and Hardware
Flight Control Hardware

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Navigation with Distributed Sensors & Platforms (NAVKA-Concept)
NAVKArine
FC45 x 5 x 2 [cm]
bz,eb
by,eb
bx,eb
bz,eb
by,eb
bx,eb
eeeeeeeeeeee | |z y x||y p r| zyx|z y x)t( = y
UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
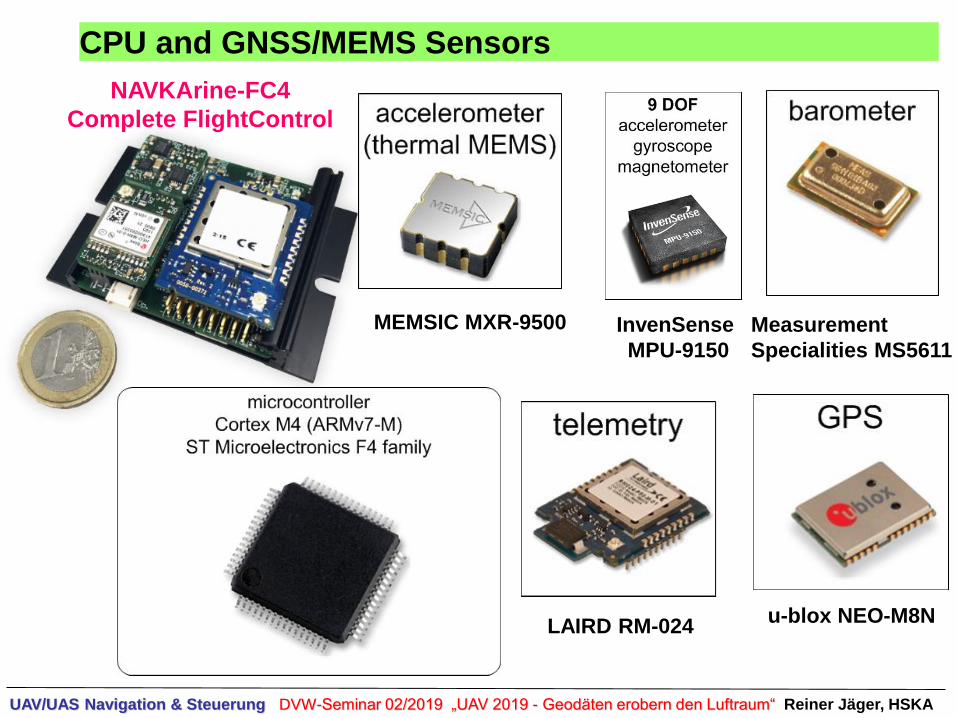
CPU and GNSS/MEMS Sensors
u-blox NEO-M8N
MEMSIC MXR-9500
LAIRD RM-024
InvenSense
MPU-9150
Measurement
Specialities MS5611
NAVKArine-FC4
Complete FlightControl

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Purpose and Hardware
Navigation
with
Distributed Sensors
and Platforms

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
....]t)(!2
1tI[)tt()t( 22b
ebbeb
be
be +++−= ΩΩRR
Orientation / Attitude
bie
bib
beb )Sensor( ΩΩΩ −=with
Space Curve of the body (b ) in the e-frame
)tt()t( beb
beb −=ΩΩ
Rotation Rates of the Body (b ) with respect to the e-frame
1.) State Transition-Equations for the body (b) in the e-frame
Modifcation
of the State
Parameters
and
Equations
by
Considering
Special Conditions
Detected in
Multithreading
Computing
New Way (NAVKA): Algorithms for Multiplatform-, Multisensor-, Leverarm-DesignNew Way (NAVKA): Algorithms for Multiplatform-, Multisensor-, Leverarm-Design
bz,eb
by,eb
bx,eb
bz,eb
by,eb
bx,eb
eeeeeeeeeeee | |z y x||y p r| zyx|z y x)t( = y

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
ipbp ],[ Rt
i
j
j,iss )],(,[ rt
2.) „Multisensor-Multiplatform Leverarm“ Concept
Sensor-
Position
and
Orientation
Platform
Position
and
Orientation
New Way (NAVKA) – Multisensor State Equations (here; e-frame)
bz,eb
by,eb
bx,eb
bz,eb
by,eb
bx,eb
eeeeeeeeeeee | |z y x||y p r| zyx|z y x)t( = y

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Accelerometer- Sensorobservation j (Rawdata, on i-th Platform (p) – one-dimensional!)
ipbp ],[ Rt
i
j
j,iss )],(,[ rt
Orientation j-th
Sensor (s)
on i-th Platform (p)
j,i
pij,si
sin
sincos
coscos
=r
j,i
i
ijj,i
see
ieeie
eeie
ee
be
i,pb
p
ss
])t( )t(2 )()t([
)y,p,r(a
xΩΩxΩxgx
RRr
++−
=
i
j,i
i
j,ij,i
p
s
p
ssa ar = i,es
be
i,pb
p
s j,i
i
j,i)y,p,r( aRRa =
Observation-Equation for Sensor j
on Platform i
New Way (NAVKA): Algorithms for Multiplatform-, Multisensor- and Leverarm-Design

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
][)y,p,r(j,i
ps,p
bp
bp,b
eb
eb
es
i
iiij,itRtRxx ++=
j,i
i
ijj,i
see
ieeie
eeie
ee
be
i,pb
p
ss
])t( )t(2 )()t([
)y,p,r(a
xΩΩxΩxgx
RRr
++−
=
Referencing : Platform p(i) on Body (b) and Sensor s(i,j) on Platform (i) – „Leverarms“
(1)
(2)
„l(i,j)“
Observation-Equation for Sensor j
on Platform i
New Way (NAVKA): Algorithms for Multiplatform-, Multisensor- and Leverarm-Design
bz,eb
by,eb
bx,eb
bz,eb
by,eb
bx,eb
eeeeeeeeeeee | |z y x||y p r| zyx|z y x)t( = y

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Orbit Design of the 4 GNSS (without Augmentation Systems)
GPS Orbit and GlONASS Orbit
Chinese
COMPASS Orbit
Orbit – Segment Galileo
28 Dec.2005 Giove-A lift off
05:19 UTC Baikonour,
Kazakhstan Galileo Satellite
UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
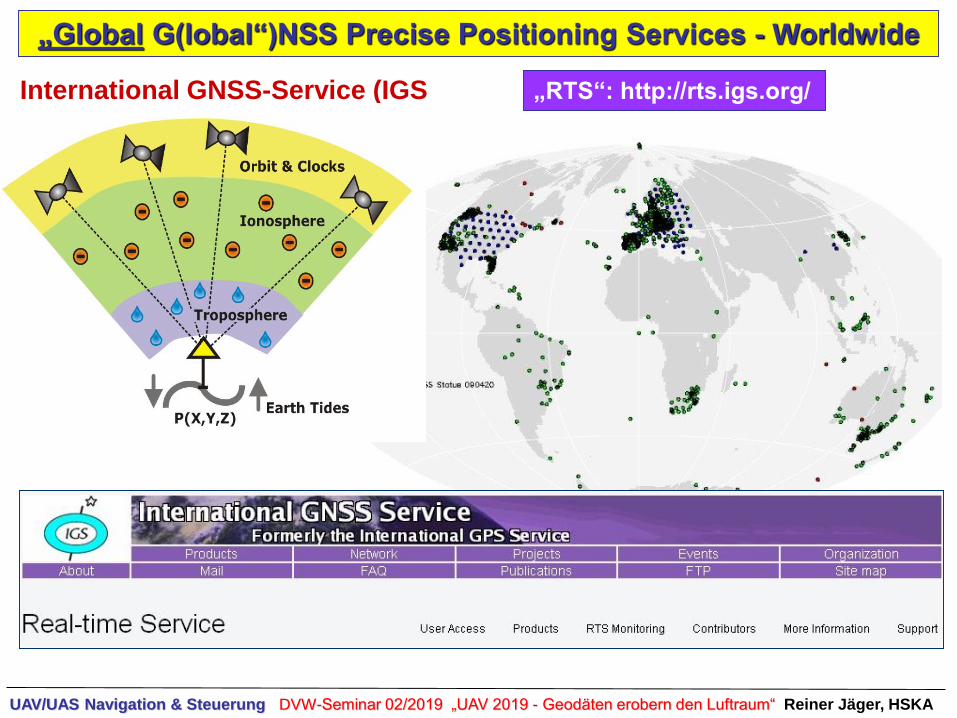
International GNSS-Service (IGS
„Global G(lobal“)NSS Precise Positioning Services - Worldwide
„RTS“: http://rts.igs.org/
UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
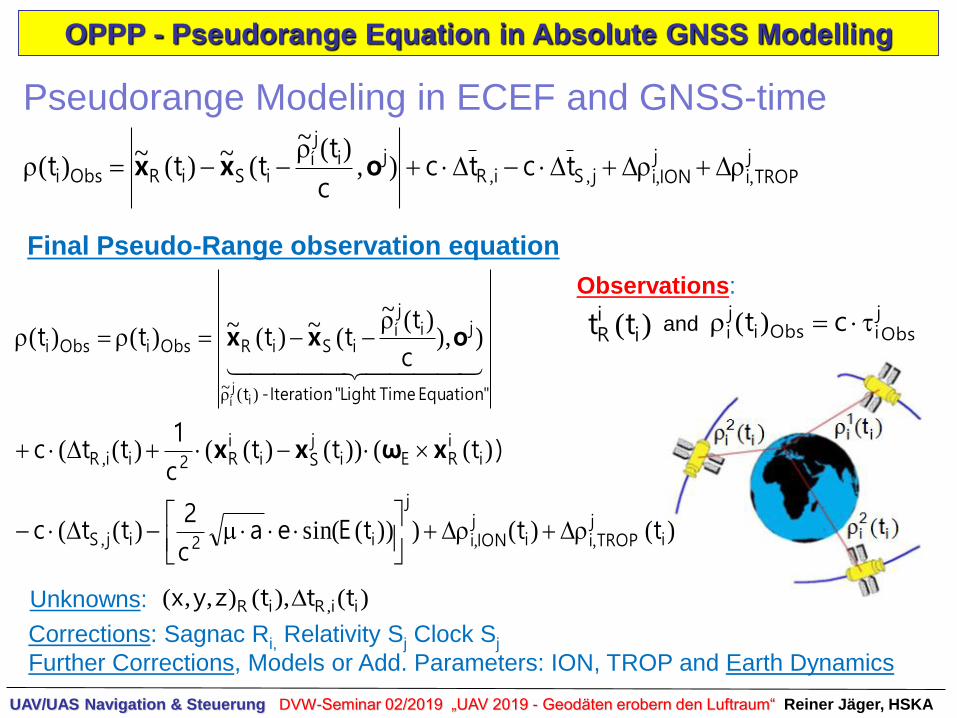
Pseudorange Modeling in ECEF and GNSS-time
jTROPi
jIONijSiR
jijí
iSiRObsi tctcc
tttt ,,,,),
)(~(
~)(
~)( ++−+
−−= oxx
Final Pseudo-Range observation equation
)()()))(sin()((
)(())()(()((
)),)(~
(~
)(~
)()(
,,,
,
)(~
ijTROPii
jIONi
j
i2ijS
iiREi
jSi
iR2iiR
Equation" Time Light" :Iteration - t
jijí
iSiRObsiObsi
tttEeac
2 ttc
)tttc
1ttc
c
ttttt
ijí
++
−−
−++
−−==
xωxx
oxx
Unknowns: )(),(),,( , iiRiR tttzyx
Corrections: Sagnac Ri, Relativity Sj Clock Sj
Further Corrections, Models or Add. Parameters: ION, TROP and Earth Dynamics
Observations:
)( iiR tt and
ObsjiObsi
ji ct = )(
OPPP - Pseudorange Equation in Absolute GNSS Modelling

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Rover Motion: Over Point 2
20 cm
RTS/IGS - Realtime Data Stream of IGS SSR-Products
Ublox M8T and PPP-K
3D IGS/RTS PPP-K (Kinematic)
Positioning Error at 1 Hz in
ITRF2008.09.2015
Positioning Accaracy: 0.25m
Key:
- NAVKA RTKLIB’s based GNSS Algorithms
- Position in “ITRF 2014.yyyy.mm Frame”
OPPP – L1-Pseudorange and –Phasemeasurements using RTKLIB
New Generation (02/2019)
Low Cost Free Multifrequencies GNSS
(GPS L1/L5, GALILEO E1/E5a, ….)
e.g.ublox ZED F9P (right)
PPP-K: 5 cm, DGNSS RTK; (1-3) cm

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
txR ++=1t,ITRFyy1zyx
1t,zzITRF1 )t(),,()m1()t(x
( ) ( )( ) )tt( )t()t()m( )t()t( 12t.ITRFzz1)j(Pt.ITRFzz1t.ITRFzz1t.ITRFzz2 1112−++++= xRtxRxx
2.7cm/y => 80 cm
(ETRF89 – ITRF)
OPPP GNSS Positioning – Geodynamical Modeling Required

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
General Case
Special Case: „Platform = Body“
j,ibs
eb
eb
esGNSS )y,p,r(
j,itRxx +=−
Code-
Phase-
Doppler
GNSS-Obs.
Platform
Position
Sensor-
Position
on
PlatformPlatform
Orientation
NAVKA Algorithms for Multiplatform-, Multisensor- and Leverarm-Design
][)y,p,r(j,i
ps,p
bp
bp,b
eb
eb
esGNSS
i
iiij,itRtRxx ++=
−
bz,eb
by,eb
bx,eb
bz,eb
by,eb
bx,eb
eeeeeeeeeeee | |z y x||y p r| zyx|z y x)t( = y

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Dynamics
Flight Control Development
General Aspects
for Scalable UAV

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Pitch p
Roll r
Yaw y
A = Area
r = Radius
bzeb
byeb
bxeb
,,,
eee z y x
Flight Dynamics of a Quadropter - 4 Propellers and Symmetry
+ l
- h
Thrust of Propeller
Motion of Body
Propeller
Design on
Body
Cp

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Dynamics of a Quadropter - 4 Propellers and Symmetry
Motion of Body
Total Motor Thrust F
Total MotorTorque M
−
−
=
0
TTl
TTl
HV
RL
T )(
)(
M

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Dynamics with arbitrary propeller orientation
Tiiiii
2i
4ii
bi Rc )cos,sinsin,sin(cos −=T
A = Area
r = Radius
Cp
),( ii

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Dynamics of a Quadropter - 4 Propellers and Symmetry

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Dynamics of a Quadropter - 4 Propellers and Symmetry
bopEnvHV
RLb
opEnvbT
bges
0
TTl
TTl
.Pr/..Pr/. )(
)(
MMMM
+
−
−
=+=
Side Wind caused
Roll Momenta R
Propeller Rotation
Air Resistance
Momenta D
Motion of Body including Air Environment
Propeller Rotation
Horizontal Forces H
Momenta

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Control Development Multicopter – n Prop.,no Symmetry
- General Propeller
Design (l, h, r, Cp ,…)
- Discrete J Momentum of Inertia
- Dynamically changing J
Manned Volocopter VC 200
ZIM Project, Flight Control
by IAF / HSKA
n1iiP ,, =

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Control Development Multicopter – n Prop.,no Symmetry
- General Propeller
Design (l, h, r, Cp ,…)
- Discrete J Momentum of Inertia
- Dynamically changing J
Manned Volocopter VC 200
ZIM Project, Flight Control
by IAF / HSKA
n1iiP ,, =
bib
bib
bib
n
1i
benv
bi
bges d ωJωJωMMM += += )()(
bii
bi TrM =
Euler Equations

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Manned Volocopter
VC 200
ZIM Project
Flight Control
by IAF / HSKA
Newton Equations n1iiP ,, =
Flight Control Development Multicopter – n Prop.,no Symmetry
itotal
dt
md
=
)( vF
bbibbb
bib
b
ibi
btotal mmm
dt
mdm vωvvω
vgRFF +=+
=+= )(

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Control Development Multicopter – n Prop.,no Symmetry
)t,ttm
)t,tm
ePD
eTbges
bges
)()(),(,,,(
)()(,,,(
eeygJF
yygJFM,F
=
=
)t,tmt ePD
Tbges
bges )()(,,,()(: eegJFu'M,F ==
StateNavdesired ttt .)()()( yye −=Control Deviation
(German: Regelabweichung)
=
= (t))(
τ
τ
τ
T
(t)'
ψ
θ
φeuu
Instance 1.
Variable Control
(t)'u

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Control Development Multicopter – n Prop.,no Symmetry
)t,ttm
)t,tm
ePD
eTbges
bges
)()(),(,,,(
)()(,,,(
eeygJF
yygJFM,F
=
=
)t,tmt ePD
Tbges
bges )()(,,,()(: eegJFu'M,F ==
++=
0DIP tdtttt )()()()(' eKeKeKu
PD-Controller and PID-Controller, respect.
StateNavdesired ttt .)()()( yye −=Control Deviation
(German: Regelabweichung)

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Control Development Multicopter – n Prop.,no Symmetry
n=4
Variables Control Final (t)(t)'(t) uue ==
Control:
n1,i,ωiP =

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Control Development Multicopter – n Prop.,no Symmetry
TTni1 MF,Ku == −,...,,...,
IstSoll ttt )()()( yye −=
Control Deviation
(German: Regelabweichung)
(t)]Δω ,....,,...Δ[Δ][(t) T
ni1
TuKKMF,u' ===

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
""
::....),,( ; 1
xMotormatri
Chly
n
i
i
P
P
p
=
=
=
K
KF
M
F
M
Ambiguous =>
Optimization problem
Flight Control Development Multicopter – n Prop.,no Symmetry
PhD candidate
MSc Jan Zwiener
Pi
NAVKA
Daimler
Project
Safe-
Guard
UAS
Crash
Hall
Sindel-
fingen

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
2
3
1
5
4
6
7
8
9
18
16
10
11
15
14
17
12
13
X (Roll)
Y
Change of Mass Distribution
Fail of Propellers
Flight Control Development Multicopter – n Prop.,no Symmetry

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
NAVKA Flight Control Mathematical Model and Algorithms
T
bzeb
byeb
bxeb
eee
eeeeeeeee
z y x
y p r zyxz y xty
=
s||
||||)(
,,,
Teeeeeeeee y p r zyxz y xty ||)( =
n1iiP ,, = Motorcontroller
Flight Control
Algorithms
Cascade
Adaptive
Controller
niiP ,1, =

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Simulations
Flight Control Simulations for
Scalable UAV

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Control
General
Multicopter
„Hardware-
in-the-Loop“
Simulation
Course
Navigation
Parameters
given by
Trajectory or
Remote Control
Different
Environment
Influence
Factors

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
„Hardware-in-the-Loop“ Simulation NAVKA-Flight-Control
„Position Hold“ Functionality - Altitude

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Real Tests with different UAV and Ground Control
„Position-Hold“ Functionality
http://www.qgroundcontrol.org/

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
„Position and Attitude Hold“ Functionality
Real Tests with different UAV and Ground Control

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Demonstrations
“Geodäten erobern den Luftaum”
Scalable UAV/UAS
and
Manned Multicopters

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Control Developments Multicopter n Propellers
NAVKA-UAV and NAVKArine FC4 Flight Control Position Hold

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Hexacopter 1 – NAVKArine-FC1

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Demonstration VC25 Ironbird (3m)
NAVKArine-FC2

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Flight Demonstration VC25 Carbon (3m)
NAVKArine-FC3

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
NAVKArine-FC4

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
NAVKA Flight Control (FC4) www.volocopter.com, Daimler Entreprise

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
NAVKA Flight Control (FC4)
www.volocopter.com
Daimler Investment Entreprise
https://www.youtube.com/watch?v=VFHYW2ueNeM

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Scaleability of UAV in Usability
Flight Control for
Scalable UAV
Scaleability in respect to
Sensor-Equipment

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Scaleability in respect to Sensor-Equipment

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Scaleability in Respect to Sensor-Equipment
UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Quasi-Autonomuous Out-/Indoor Navigation
NAVKAG1MC and NAVKA FC6 (Out- and Indoor UAV)

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
NAVKA-Project – Indoor UAS (e.g. Daimler Crash Hall Sindelfingen)
http://www.navka.de/images/files/UAV.mp4
NAVKA - Flight Control (FCx)
- Algorithms, Software and Hardware for
Out- and Indoor UAV/UAS (FC6, 2018/2019)

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA
Conclusions – NAVKA Flight Control
NAVKA
Flight Control
NAVKArine-FC4
- Any UAV
- Any
Manned Volocopter
- Size
- Payloads
- Sensors equipment
- Manned of UAV
- 3D mapping and geosensing
- Film industry
- Search and rescue of people
- Agriculture UAV
- Facility management and monitoring UAV
- Wild life protection
- Transport UAV
- Fire Fighting air vehicles
- ABC sensing UAV for emergency event
- Environment friendly and silent: air taxis, individuals
NAVKA
Out-/
Indoor
UAS

UAV/UAS Navigation & Steuerung DVW-Seminar 02/2019 „UAV 2019 - Geodäten erobern den Luftraum“ Reiner Jäger, HSKA www.navka.de
Flight Control Developments Multicopter – n Propeller