ucfstudyunion.files.wordpress.com … · web viewegn 3321 . final exam review. fall 2017 *try...
TRANSCRIPT
EGN 3321
Final Exam Review
Fall 2017
*Try finishing each problem in 15 minutes or less to practice test-like time constraints. The topics on the practice exam are what I feel have been stressed in class, but there may be problems on the test not like ones in this practice test. Use other resources like the notes, examples, and homework to better prepare for the exam.
*My solutions will be posted after the review on my wordpress site at
https://ucfsi.wordpress.com/dynamics-with-alanna/
Chapter 15: Kinematics of Rigid Bodies
Translation vs. rotation: in translation, all particles on the body move parallel paths which can be rectilinear or curvilinear; with rotation, particles move in parallel circular pathso Don’t confuse curvilinear translation with rotation
o Translation: all particles in the body have the same velocity and acceleration
ABAB rrr
vB=v AaB=aA
o Rotation: about a fixed axis
v=drdt=ω×r
ω=ωk=θk or v=rωcomponenton accelerati radial componenton accelerati l tangentia
rr
rra
22 rarararka
nn
tt
For uniformly accelerated rotation:
020
2
221
00
0
2
tt
t
To convert from radians to revolutions, divide by 2*pi; to convert from rpm to rad/s, multiply by 2*pi/60.
General plane motion is considered to be the sum of translation and rotation with respect to an arbitrary point.

rvrkv ABABAB
ABAB rkvv
Instantaneous center of rotation: we can find the ICR by finding the point where the perpendicular distance from the velocity vectors intersect
o The particle at the center of rotation has zero velocity Absolute and relative acceleration
aB=aA+aB/ A(aB / A )t=rα(aB / A )n=rω
2
Rate of change with respect to a rotating frame:
kQjQiQQ zyx
Rate of change with respect to a fixed point:
QQQ OxyzOXYZ
Plane motion relative to a rotating frame
vP=(r )OXY=×r+( r )OxyaP=
×r +×( ×r )+2 ×(r )Oxy+( r )Oxy
vP=v P '+v P /FvP /F=(r )Oxy=velocity of P on path
vP '=absolute velocity of P’
ABAB vvv
ABnAB
ABtAB
ra
rka
2
( Q )Oxyz=Q xi+Q y
j+Qzk
aP=aP '+aP /F+2 ×( r )Oxy¿aP '+aP /F+acac=2 ×(r )Oxy=2 ×vP /F=

coriolis



Imr
mrr
mvrH
ii
n
iiii
n
iiiiG
Δ
Δ
Δ
21
1
Chapter 16: Plane Motion of Rigid Bodies: Forces and Accelerations
Kinetics of rigid bodies: relationship between forces on a rigid body and the shape, mass and motion produced.
Use the information from this chapter when given forces and accelerations Equations:
GG HMamF and
Imr
mrr
mvrH
ii
n
iiii
n
iiiiG
Δ
Δ
Δ
21
1
IIHG d’Alembert’s Principle: the external forces acting on a rigid body are equivalent to the
effective forces of the particles forming the body Plane motion is the sum of translation and rotation For your FBD: isolate the body, draw axis, draw forces, draw in support reactions, and add
dimensions; For KD: isolate the body, draw in ma and Iα Kinematic relation between the motion of the mass center and motion of the body about a
point is:2 rara nt
for rolling motion:o rolling without sliding:
rarx NF s
o rolling, sliding impending:
NF so Rotating and sliding:
NF ko Acceleration of mass center:
nOGtOGO
OGOG
aaa
aaa

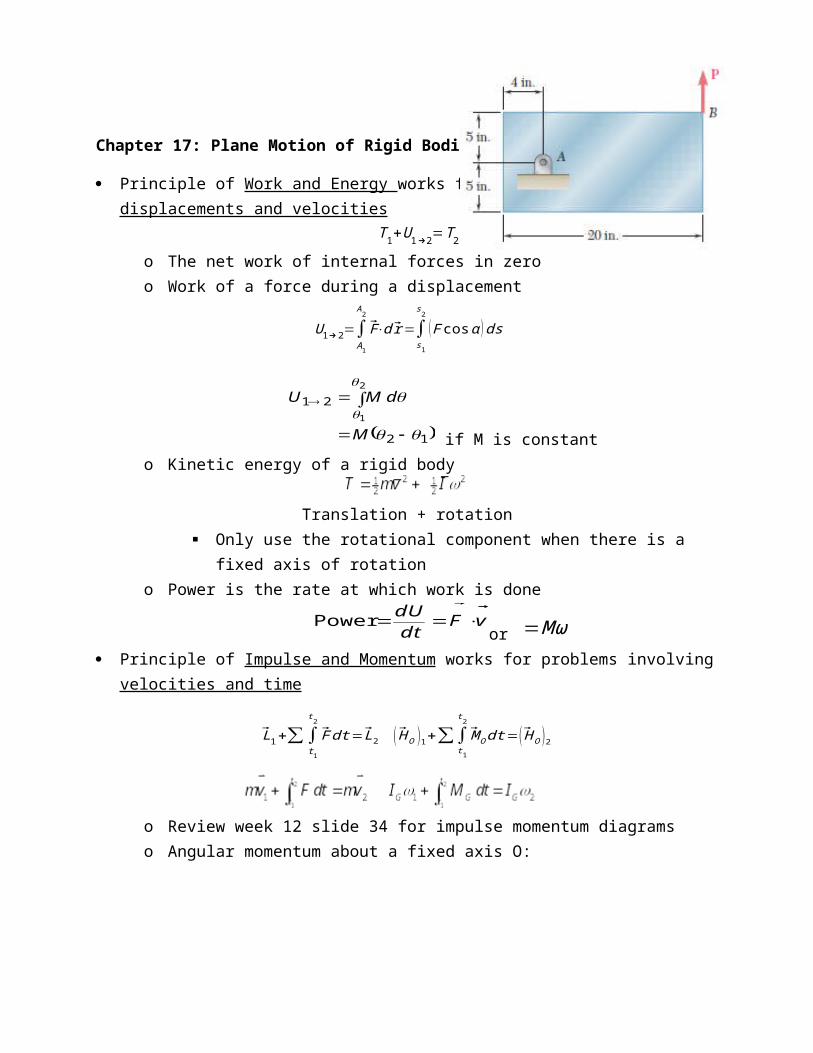
Chapter 17: Plane Motion of Rigid Bodies: Energy and Momentum
Principle of Work and Energy works for problems involving displacements and velocitiesT 1+U1→2=T 2
o The net work of internal forces in zeroo Work of a force during a displacement
12
212
1
M
dMU
if M is constanto Kinetic energy of a rigid body
Translation + rotation Only use the rotational component when there is a fixed axis of rotation
o Power is the rate at which work is done
vFdtdU
Poweror =Mω
Principle of Impulse and Momentum works for problems involving velocities and time
L1+∑t1
t2
F dt=L2 ( H O )1+∑t 1
t 2
MOdt=( H O )2
o Review week 12 slide 34 for impulse momentum diagramso Angular momentum about a fixed axis O:
2rmI
rrmIrvmIIO
When there are no external forces acting on a rigid body:L1=L2 (H0 )1=(H0 )2
Eccentric impact problems are solved with Impulse and Momentum and Coefficient of Restitution
U1→2=A1
A2
F⋅dr=s1
s2
(F cos α )ds
e=coefficient of restitution=Rdt
Pdt =
(vB' )n−(v A' )n(v A )n−(vB )n