zdenˇek posp´ıˇsil masaryk university, faculty of …pospisil/files/sscb2011.pdf · masaryk...
TRANSCRIPT
Population dynamics – a source of diversity
Zdenek Pospısil
Masaryk University, Faculty of scienceDepartment of Mathematics and Statistics
7th Summer School on Computational Biology
September 15, 2011

Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 2 / 18

Introduction
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 3 / 18

A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Leonhard Euler: Introductio in analysin infinitorum (1748)
Geometric growth of population

A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Thomas Robert Malthus: An Essay on the Principle ofPopulation (1798)
• The increase of population is necessarily limited by the meansof subsistence,• population does invariably increase when the means ofsubsistence increase,• the superior power of population is repressed, and the actualpopulation kept equal to the means of subsistence, by misery andvice.

A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Pierre-Francois Verhulst: Recherches mathematiques sur la loied’accroissement de la population (1845)
Self-limited (logistic) growth of population
A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Alfred J. Lotka: Analytical note on certain rhythmic relations inorganic systems (1920)

A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Alfred J. Lotka: Analytical note on certain rhythmic relations inorganic systems (1920)Vito Volterra: Variazioni e fluttuazioni del numero d’individui inspecie animali conviventi. (1926)

A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Alfred J. Lotka: Elements of physical biology (1925)Vito Volterra: Lecons sur la theorie mathematique de la lutte purla vie (1931)

A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Alfred J. Lotka: Elements of physical biology (1925)Vito Volterra: Lecons sur la theorie mathematique de la lutte purla vie (1931)Georgij F. Gause: The Struggle for existence (1934)

A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Alfred J. Lotka: Elements of physical biology (1925)Vito Volterra: Lecons sur la theorie mathematique de la lutte purla vie (1931)Georgij F. Gause: The Struggle for existence (1934)Andrej N. Kolmogorov: Sula teoria di Volterra della lota perl’esistenza (1936)

A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Charles S. Elton: Animal ecology (1927)
food chain, ecological niche, pyramid of numbers

A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Charles S. Elton: Animal ecology (1927)Alexander J. Nicholson: The balance of animal population (1933)
density (in)dependent growth
A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Charles S. Elton: Animal ecology (1927)Alexander J. Nicholson: The balance of animal population (1933)
Ch. S. Elton, A. J. Nicholson: The ten-year cycle in numbers oflynx in Canada (1942)
A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Charles S. Elton: Animal ecology (1927)Alexander J. Nicholson: The balance of animal population (1933)
Ch. S. Elton, A. J. Nicholson: The ten-year cycle in numbers oflynx in Canada (1942)
Ernest T. Seton: The arctic prairies (1912)
A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Charles S. Elton: Animal ecology (1927)Alexander J. Nicholson: The balance of animal population (1933)
Ch. S. Elton, A. J. Nicholson: The ten-year cycle in numbers oflynx in Canada (1942)
Crawford S. Holling: The functional response of predator to preydensity and its role in mimicry and population regulation (1965)

A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
Patrick H. Leslie: On the use of matrices in certain populationmathematics (1945)
structured population

A bit of history
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 4 / 18
John G. Skellam: Random Dispersal in Theoretical Populations(1951)
dispersal of population in space, random walk, biological invasion

Sources, textbooks
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 5 / 18
Svire�ev, �. M. { Logofet, D. O. Usto�iqivost~biologiqeskiq soobwestv. Moskva: Nauka, 1978.
Sources, textbooks
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 5 / 18
■ Pielou E. C.: An Introduction to Mathematical Ecology.J.Willey&Sons, New York, NY, 1969
Svire�ev, �. M. { Logofet, D. O. Usto�iqivost~biologiqeskiq soobwestv. Moskva: Nauka, 1978.

Sources, textbooks
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 5 / 18
■ Pielou E. C.: An Introduction to Mathematical Ecology.J.Willey&Sons, New York, NY, 1969
■ Svire�ev, �. M. { Logofet, D. O. Usto�iqivost~biologiqeskiq soobwestv. Moskva: Nauka, 1978.

Sources, textbooks
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 5 / 18
■ Pielou E. C.: An Introduction to Mathematical Ecology.J.Willey&Sons, New York, NY, 1969
■ Svire�ev, �. M. { Logofet, D. O. Usto�iqivost~biologiqeskiq soobwestv. Moskva: Nauka, 1978.■ Kot M.: Elements of Mathematical Ecology. Cambridge
University Press: Cambridge, New York, Melbourne,Madrid, Cape Town, Singapore, Sao Paulo, 2001
Sources, textbooks
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 5 / 18
■ Pielou E. C.: An Introduction to Mathematical Ecology.J.Willey&Sons, New York, NY, 1969
■ Svire�ev, �. M. { Logofet, D. O. Usto�iqivost~biologiqeskiq soobwestv. Moskva: Nauka, 1978.■ Kot M.: Elements of Mathematical Ecology. Cambridge
University Press: Cambridge, New York, Melbourne,Madrid, Cape Town, Singapore, Sao Paulo, 2001
■ Thieme H. R.: Mathematics in Population Biology.Princeton University Press: Princeton and Oxford, 2003

Sources, textbooks
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 5 / 18
■ Pielou E. C.: An Introduction to Mathematical Ecology.J.Willey&Sons, New York, NY, 1969
■ Svire�ev, �. M. { Logofet, D. O. Usto�iqivost~biologiqeskiq soobwestv. Moskva: Nauka, 1978.■ Kot M.: Elements of Mathematical Ecology. Cambridge
University Press: Cambridge, New York, Melbourne,Madrid, Cape Town, Singapore, Sao Paulo, 2001
■ Thieme H. R.: Mathematics in Population Biology.Princeton University Press: Princeton and Oxford, 2003
■ Turchin P.: Complex Population Dynamics: atheoretical/empirical synthesis. Princeton University Press:Princeton, NJ, 2003

Sources, textbooks
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 5 / 18
■ Pielou E. C.: An Introduction to Mathematical Ecology.J.Willey&Sons, New York, NY, 1969
■ Svire�ev, �. M. { Logofet, D. O. Usto�iqivost~biologiqeskiq soobwestv. Moskva: Nauka, 1978.■ Kot M.: Elements of Mathematical Ecology. Cambridge
University Press: Cambridge, New York, Melbourne,Madrid, Cape Town, Singapore, Sao Paulo, 2001
■ Thieme H. R.: Mathematics in Population Biology.Princeton University Press: Princeton and Oxford, 2003
■ Turchin P.: Complex Population Dynamics: atheoretical/empirical synthesis. Princeton University Press:Princeton, NJ, 2003
■ Tkadlec E.: Populacnı ekologie. Struktura, rust a dynamikapopulacı. Univerzita Palackeho v Olomouci, Olomouc 2008

Sources, textbooks
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 5 / 18
■ Edelstein-Keshet L.: Mathematical Models in Biology.Random House: New York, NY, 1988

Sources, textbooks
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 5 / 18
■ Edelstein-Keshet L.: Mathematical Models in Biology.Random House: New York, NY, 1988
■ Murray J. D.: Mathematical Biology I: An Introduction.Springer-Verlag: Berlin, Heidelberg, 2001
Sources, textbooks
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 5 / 18
■ Edelstein-Keshet L.: Mathematical Models in Biology.Random House: New York, NY, 1988
■ Murray J. D.: Mathematical Biology I: An Introduction.Springer-Verlag: Berlin, Heidelberg, 2001
■ Britton N. F.: Essential Mathematical Biology.Springer-Verlag: London, 2003

Sources, textbooks
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 5 / 18
■ Edelstein-Keshet L.: Mathematical Models in Biology.Random House: New York, NY, 1988
■ Murray J. D.: Mathematical Biology I: An Introduction.Springer-Verlag: Berlin, Heidelberg, 2001
■ Britton N. F.: Essential Mathematical Biology.Springer-Verlag: London, 2003
■ de Vries G., Hillen T., Lewis M., Muller J., Schonfisch B.:A course in Mathematical Biology. Siam: Philadelphia,2006

Software
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 6 / 18

Software
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 6 / 18
Software
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 6 / 18

Software
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 6 / 18
Kreith K., Chakerian, D.: Iterative Algebra and DynamicModeling: a curriculum for the third millennium.Springer-Verlag: New York, 1999

Software
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 6 / 18

Software
Introduction
A bit of history
Sources, textbooks
Software
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
Population dynamics – 6 / 18
Henry M., Stevens H.: A Primer of Ecology with R. Springer:Dordrecht, Heidelberg, London, New York, 2009

General theory of population dynamics
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 7 / 18

Principles of population
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 8 / 18

Principles of population
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 8 / 18
1. A size of population sustains in the exponential increase ordecrease until environmental conditions cause a change ofthe status.

Principles of population
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 8 / 18
1. A size of population sustains in the exponential increase ordecrease until environmental conditions cause a change ofthe status.
2. The relative change of a population size equals to theimpact of environmental conditions.

1st principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 9 / 18
A size of population sustains in the exponential increase ordecrease until environmental conditions cause a change of thestatus.
x(t) = x0qt

1st principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 9 / 18
A size of population sustains in the exponential increase ordecrease until environmental conditions cause a change of thestatus.
x(t) = x0qt
x(t+ 1) = x0qt+1,
1st principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 9 / 18
A size of population sustains in the exponential increase ordecrease until environmental conditions cause a change of thestatus.
x(t) = x0qt
x(t+ 1) = qx(t),

1st principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 9 / 18
A size of population sustains in the exponential increase ordecrease until environmental conditions cause a change of thestatus.
x(t) = x0qt
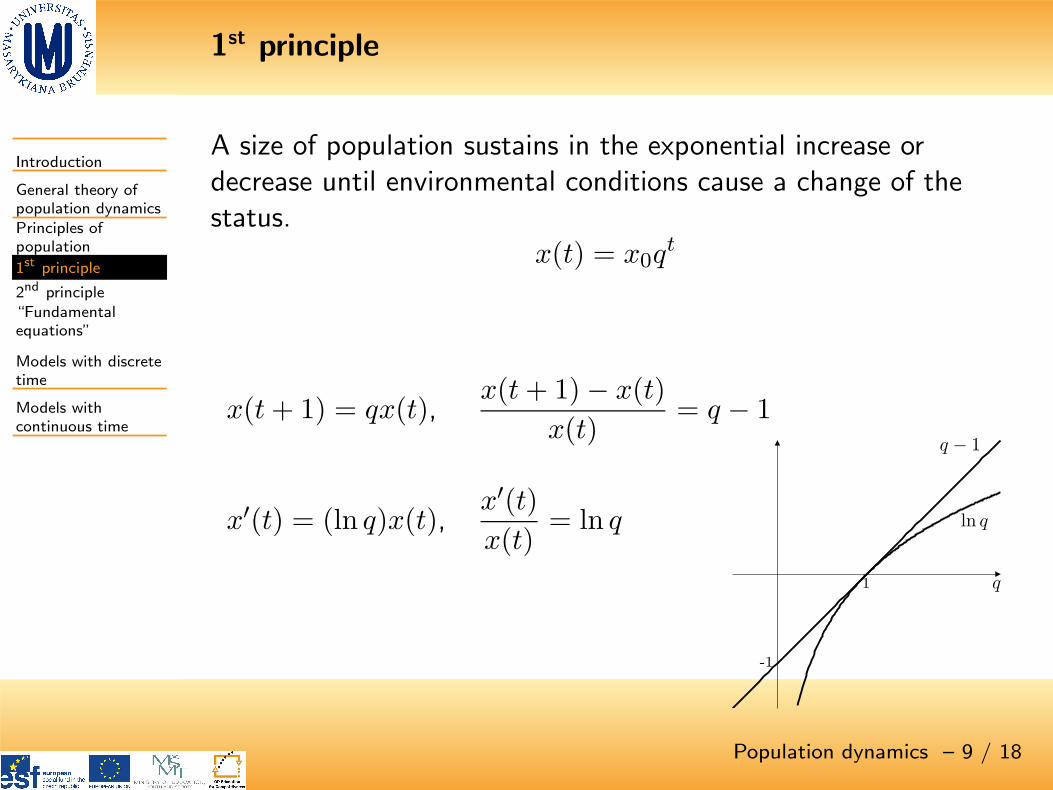
x(t+ 1) = qx(t),x(t+ 1)− x(t)
x(t)= q − 1

1st principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 9 / 18
A size of population sustains in the exponential increase ordecrease until environmental conditions cause a change of thestatus.
x(t) = x0qt
x(t+ 1) = qx(t),x(t+ 1)− x(t)
x(t)= q − 1
x′(t) = x0qt ln q,
1st principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 9 / 18
A size of population sustains in the exponential increase ordecrease until environmental conditions cause a change of thestatus.
x(t) = x0qt
x(t+ 1) = qx(t),x(t+ 1)− x(t)
x(t)= q − 1
x′(t) = (ln q)x(t),

1st principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 9 / 18
A size of population sustains in the exponential increase ordecrease until environmental conditions cause a change of thestatus.
x(t) = x0qt
x(t+ 1) = qx(t),x(t+ 1)− x(t)
x(t)= q − 1
x′(t) = (ln q)x(t),x′(t)
x(t)= ln q
1st principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 9 / 18
q1
-1
q − 1
ln q
A size of population sustains in the exponential increase ordecrease until environmental conditions cause a change of thestatus.
x(t) = x0qt
x(t+ 1) = qx(t),x(t+ 1)− x(t)
x(t)= q − 1
x′(t) = (ln q)x(t),x′(t)
x(t)= ln q

1st principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 9 / 18
q1
-1
q − 1
ln q
A size of population sustains in the exponential increase ordecrease until environmental conditions cause a change of thestatus.
x(t) = x0qt
x(t+ 1) = qx(t),x(t+ 1)− x(t)
x(t)= r
x′(t) = (ln q)x(t),x′(t)
x(t)= r

2nd principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 10 / 18
The relative change of a population size equals to the impact ofenvironmental conditions.
2nd principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 10 / 18
The relative change of a population size equals to the impact ofenvironmental conditions.
x′(t)
x(t)= r

2nd principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 10 / 18
The relative change of a population size equals to the impact ofenvironmental conditions.
x′i(t)
xi(t)= i
(
x1(t), x2(t), . . . , xn(t))
, i = 1, 2, . . . , n
2nd principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 10 / 18
The relative change of a population size equals to the impact ofenvironmental conditions.
x′i(t)
xi(t)= i
(
x1(t), x2(t), . . . , xn(t))
, i = 1, 2, . . . , n
x(t+ 1)− x(t)
x(t)= r

2nd principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 10 / 18
The relative change of a population size equals to the impact ofenvironmental conditions.
x′i(t)
xi(t)= i
(
x1(t), x2(t), . . . , xn(t))
, i = 1, 2, . . . , n
xi(t+ 1)− xi(t)
xi(t)= i
(
x1(t), x2(t), . . . , xn(t))
,
i = 1, 2, . . . , n

2nd principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 10 / 18
The relative change of a population size equals to the impact ofenvironmental conditions.
x′i(t)
xi(t)= i
(
x1(t), x2(t), . . . , xn(t))
, i = 1, 2, . . . , n
xi(t+ 1)− xi(t)
xi(t)= i
(
x1(t), x2(t), . . . , xn(t))
,
i = 1, 2, . . . , n
x(t+ 1) = qx(t)
2nd principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 10 / 18
The relative change of a population size equals to the impact ofenvironmental conditions.
x′i(t)
xi(t)= i
(
x1(t), x2(t), . . . , xn(t))
, i = 1, 2, . . . , n
xi(t+ 1)− xi(t)
xi(t)= i
(
x1(t), x2(t), . . . , xn(t))
,
i = 1, 2, . . . , n
x(t+ 1) = erx(t)

2nd principle
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 10 / 18
The relative change of a population size equals to the impact ofenvironmental conditions.
x′i(t)
xi(t)= i
(
x1(t), x2(t), . . . , xn(t))
, i = 1, 2, . . . , n
xi(t+ 1)− xi(t)
xi(t)= i
(
x1(t), x2(t), . . . , xn(t))
,
i = 1, 2, . . . , n
xi(t+ 1) = ei(
x1(t),x2(t),...,xn(t))
x(t), i = 1, 2, . . . , n

“Fundamental equations”
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 11 / 18
Populations with overlapping generations
x′i = xii(x1, x2, . . . , xn), i = 1, 2, . . . , n
Populations with non-overlapping generations
xi(t+ 1) = ei(
x1(t),x2(t),...,xn(t))
xi(t), i = 1, 2, . . . , n

“Fundamental equations”
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 11 / 18
Populations with overlapping generations
x′i = xii(x1, x2, . . . , xn), i = 1, 2, . . . , n
Populations with non-overlapping generations
xi(t+ 1) = ei(
x1(t),x2(t),...,xn(t))
xi(t), i = 1, 2, . . . , n
i linear functions – Lotka-Volterra systemsi general functions – Kolmogorov systems

“Fundamental equations”
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 11 / 18
Populations with overlapping generations
x′i = xi(
ri − fi(x1, x2, . . . , xn))
, i = 1, 2, . . . , n
Populations with non-overlapping generations
xi(t+ 1) = eri−fi
(
x1(t),x2(t),...,xn(t))
xi(t), i = 1, 2, . . . , n
fi linear functions – Lotka-Volterra systemsfi general functions – Kolmogorov systems
f(0, 0, . . . , 0) = 0

“Fundamental equations”
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 11 / 18
Populations with overlapping generations
x′i = xi(
ri − fi(x1, x2, . . . , xn))
, i = 1, 2, . . . , n
Populations with non-overlapping generations
xi(t+ 1) = eri−fi
(
x1(t),x2(t),...,xn(t))
xi(t), i = 1, 2, . . . , n
Lotka-Volterra systems
fi(x1, x2, . . . , xn) =n∑
j=1
aijxj = Ax

“Fundamental equations”
Introduction
General theory ofpopulation dynamicsPrinciples ofpopulation
1st principle
2nd principle“Fundamentalequations”
Models with discretetime
Models withcontinuous time
Population dynamics – 11 / 18
Populations with overlapping generations
x′i = xi(
ri − fi(x1, x2, . . . , xn))
, i = 1, 2, . . . , n
Populations with non-overlapping generations
xi(t+ 1) = eri−fi
(
x1(t),x2(t),...,xn(t))
xi(t), i = 1, 2, . . . , n
Lotka-Volterra systems
fi(x1, x2, . . . , xn) =n∑
j=1
aijxj = Ax
A = (aij) – community matrix

Models with discrete time
Introduction
General theory ofpopulation dynamics
Models with discretetime
One populationTwo populations –Lotka-Volterrasystem
Models withcontinuous time
Population dynamics – 12 / 18

One population
Introduction
General theory ofpopulation dynamics
Models with discretetime
One populationTwo populations –Lotka-Volterrasystem
Models withcontinuous time
Population dynamics – 13 / 18
x(t+ 1) = erx(t), x(0) = x0 ⇒ x(t) = x0ert
One population
Introduction
General theory ofpopulation dynamics
Models with discretetime
One populationTwo populations –Lotka-Volterrasystem
Models withcontinuous time
Population dynamics – 13 / 18
x(t+ 1) = erx(t), x(0) = x0 ⇒ x(t) = x0ert
x(t+ 1) = ep(
x(t))
x(t), x(0) = x0
p decreasing – intra-specific competitionp increasing – Allee effect

One population
Introduction
General theory ofpopulation dynamics
Models with discretetime
One populationTwo populations –Lotka-Volterrasystem
Models withcontinuous time
Population dynamics – 13 / 18
x(t+ 1) = erx(t), x(0) = x0 ⇒ x(t) = x0ert
x(t+ 1) = ep(
x(t))
x(t), x(0) = x0
p decreasing – intra-specific competitionp increasing – Allee effect
p(x) = r(
1−x
K
)
– logistic equation
x > K ⇒ ep(x) > 1, x < K ⇒ ep(x) < 1
K – carrying cappacity
One population
Introduction
General theory ofpopulation dynamics
Models with discretetime
One populationTwo populations –Lotka-Volterrasystem
Models withcontinuous time
Population dynamics – 13 / 18
x(t+ 1) = erx(t), x(0) = x0 ⇒ x(t) = x0ert
x(t+ 1) = ep(
x(t))
x(t), x(0) = x0
p decreasing – intra-specific competitionp increasing – Allee effect
p(x) = r(
1−x
K
)
– logistic equation
x > K ⇒ ep(x) > 1, x < K ⇒ ep(x) < 1
K – carrying cappacity
ep(x) =q
(1 + (q − 1)x/K)b– basic equation
Two populations – Lotka-Volterra system
Introduction
General theory ofpopulation dynamics
Models with discretetime
One populationTwo populations –Lotka-Volterrasystem
Models withcontinuous time
Population dynamics – 14 / 18
x(t+ 1) = x(t)er1−a11x(t)−a12y(t)
y(t+ 1) = y(t)er2−a21x(t)−a22y(t)

Two populations – Lotka-Volterra system
Introduction
General theory ofpopulation dynamics
Models with discretetime
One populationTwo populations –Lotka-Volterrasystem
Models withcontinuous time
Population dynamics – 14 / 18
x(t+ 1) = x(t)er1−a11x(t)−a12y(t)
y(t+ 1) = y(t)er2−a21x(t)−a22y(t)
aii > 0 – intra-specific competitionaii < 0 – Allee effectaij > 0 – inter-specific competitionaij < 0 – mutualism
aijaji < 0 – predation
Models with continuous time
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 15 / 18

One population
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 16 / 18
x′ = rx, x(0) = x0 ⇒ x(t) = x0ert
One population
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 16 / 18
x′ = rx, x(0) = x0 ⇒ x(t) = x0ert
x′ = xp(x), x(0) = x0
p decreasing – intra-specific competitionp increasing – Allee effect

One population
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 16 / 18
x′ = rx, x(0) = x0 ⇒ x(t) = x0ert
x′ = xp(x), x(0) = x0
p decreasing – intra-specific competitionp increasing – Allee effect
p(x) = r(
1−x
K
)
– logistic equation

One population
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 16 / 18
x′ = rx, x(0) = x0 ⇒ x(t) = x0ert
x′ = xp(x), x(0) = x0
p decreasing – intra-specific competitionp increasing – Allee effect
p(x) = r(
1−x
K
)
– logistic equation
p(x) = rxa−1
(
1−( x
K
)b)
– generalized logistic equation
Two populations – Lotka-Volterra system
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 17 / 18
x′ = x(r1 − a11x− a12y)
y′ = y(r2 − a21x− a22y)

Two populations – Lotka-Volterra system
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 17 / 18
x′ = x(r1 − a11x− a12y)
y′ = y(r2 − a21x− a22y)
aii > 0 – intra-specific competitionaii < 0 – Allee effectaij > 0 – inter-specific competitionaij < 0 – mutualism
aijaji < 0 – predation

Gause-type predator-prey system
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 18 / 18
Gause-type predator-prey system
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 18 / 18
x′ = xp(x),
y′ = −dy
x – size of prey populationy – size of predator population
p(x) – prey growth rated – predator death rate
Gause-type predator-prey system
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 18 / 18
Holling I
Holling IIIHolling IIϕ ϕ
ϕϕ
1 1
11
2a b b + 2a
xx
x x
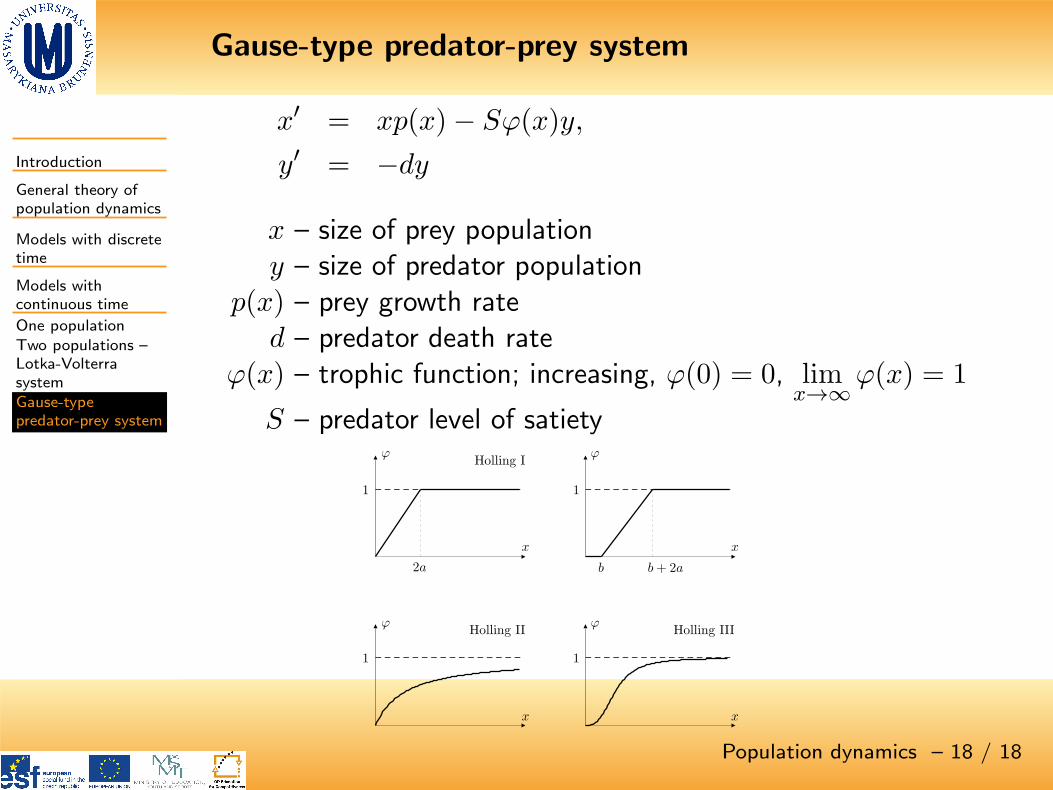
x′ = xp(x)− Sϕ(x)y,
y′ = −dy
x – size of prey populationy – size of predator population
p(x) – prey growth rated – predator death rate
ϕ(x) – trophic function; increasing, ϕ(0) = 0, limx→∞
ϕ(x) = 1
S – predator level of satiety

Gause-type predator-prey system
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 18 / 18
x′ = xp(x)− Sϕ(x)y,
y′ = −dy + κSϕ(x)y
x – size of prey populationy – size of predator population
p(x) – prey growth rated – predator death rate
ϕ(x) – trophic function; increasing, ϕ(0) = 0, limx→∞
ϕ(x) = 1
S – predator level of satietyκ – efficiency of conversion: prey into predator growth rate
Gause-type predator-prey system
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 18 / 18
x′ = x
(
p(x)− Sϕ(x)
xy
)
,
y′ = y(
− d+ κSϕ(x))

Gause-type predator-prey system
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 18 / 18
x′ = x
(
p(x)− Sϕ(x)
xy
)
,
y′ = y(
− d+ κSϕ(x))
ϕ(x) =
{
x/(2a), x < 2a
1, x ≥ 2a

Gause-type predator-prey system
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 18 / 18
x′ = x
(
p(x)− Sϕ(x)
xy
)
,
y′ = y(
− d+ κSϕ(x))
ϕ(x) =
{
x/(2a), x < 2a
1, x ≥ 2a
ϕ(x) =xk
xk + ak
ϕ(x) = 1− 2−(x/a)k

Gause-type predator-prey system
Introduction
General theory ofpopulation dynamics
Models with discretetime
Models withcontinuous time
One populationTwo populations –Lotka-VolterrasystemGause-typepredator-prey system
Population dynamics – 18 / 18
x′ = x
(
p(x)− Sϕ(x)
xy
)
,
y′ = y(
− d+ κSϕ(x))
ϕ(x) =
{
x/(2a), x < 2a
1, x ≥ 2a– Holling I
ϕ(x) =xk
xk + ak– Michaelis-Menten
ϕ(x) = 1− 2−(x/a)k – Ivlev
a – level of “half saturation”