contents€¦ · · 2017-08-10to minimize noise pollution caused by a dg set and to also meet...
TRANSCRIPT


Contents
16.1 Introduction 16/579
16.2 DG set 16/579
16.3 Operating parameters 16/58116.3.1 Residual voltage for self-excitation 16/58116.3.2 Operating PF 16/58116.3.3 A generator as a synchronous motor or a
condenser 16/58116.3.4 Field or excitation system 16/583
16.4 Theory of operation of AVR 16/584
16.5 Guidelines on the selection of a DG set 16/58516.5.1 PF lagging and less than 0.8 16/58516.5.2 PF between 0.8 and unity 16/58516.5.3 PF leading 16/585
16.6 Types of loads 16/58516.6.1 Linear loads 16/58616.6.2 Non-linear loads 16/58616.6.3 Special loads 16/586
16.7 Starting of a DG set 16/58716.7.1 Through an auto-mains failure (AMF) scheme
16/587
16.8 Protection of a DG set 16/58816.8.1 Alarm and annunciation 16/58816.8.2 Electrical protection and metering 16/589
16.9 Parallel operation 16/59416.9.1 Theory of parallel operation 16/594
16.10 Procedure of parallel operation 16/60116.10.1 Synchronization 16/601
16.11 Recommended protection for a synchronizing scheme16/608
16.12 Load sharing by two or more generators 16/608
16.12.1 Total automation through PLCs 16/608
16.13 Fault levels when two or more generators are operating inparallel 16/61116.13.1 System fault level 16/61116.13.2 Ground fault level 16/612
Relevant Standards 16/615
List of formulae used 16/615
Further Reading 16/615
16Captive(emergency)power generation
16/577


Captive (emergency) power generation 16/579
16.1 Introduction
It is common practice to provide a standby emergencysource of supply at all important installations such aslarge factories, railways, airports, hospitals and otheressential services. This is usually achieved with the useof a captive diesel generator (DG) set (Figure 16.1).Here we briefly discuss these machines, theircharacteristics and selection for a required application.We also consider schemes that are commonly used tostart a DG set and run it individually or in parallel withan existing source of supply, which may be another DGset or an infinite bus.
16.2 DG set
This comprises the following parts
EngineThis is the main prime mover (PM) for the generator andmay be a gas, petrol or diesel engine, depending uponthe availability of fuel. In the discussions below, weemphasize a diesel engine, being used more commonlyfor captive power generation.
The control of power output of a generator is obtainedthrough this PM only. It has a drooping characteristic onload, as shown in Figure 16.2. These characteristics areused to control the fuel supply to the engine through aspeed-regulating governor, which controls the poweroutput of the generator.
The difference in the speed of the engine at no loadand full load is termed the speed droop, and is expressedas a percentage of the no-load speed, i.e. speed droop orspeed regulation,
DNN N
N =
– 100%o s
o¥
whereDN = speed droop or speed regulation (%)No = speed of the engine at no-load (r.p.m.)Ns = synchronous speed or speed of the engine at full
load (r.p.m.)The droop is maintained at around 3–5% by the leading
manufacturers. The lower the droop, the better will bethe performance of the engine on load. Since
Ns µ f
\ Df µ DN
and therefore, the smaller will be the fluctuation in thefrequency of the generated power. But for paralleloperation of the generator, a higher droop will meanbetter load sharing. Refer to Examples 16.2 and 16.3.
Governor
This senses the speed of the machine and performsextremely fast and accurate adjustments in the fuel supplyto the PM. In turn it regulates the speed and the output ofthe PM within predefined limits, depending upon thedroop of the PM. The governor may be a mechanical(manual), hydraulic or electronic (automatic) device.
Figure 16.1 Diesel generator set (Courtesy: Kirloskar Electric)

16/580 Electrical Power Engineering Reference & Applications Handbook
trip. A fast-actuating governor with low response time(as low as 0.5 second) can overcome such a situation byquickly regulating the speed of the PM.
Generator
These may be of two types:
1 Rotating armature These have a rotating armatureand a static field excitation system. The output fromthe armature is taken through the slip-rings.
2 Static armature or brushless alternators Thesehave a rotating field excitation system and are nowused more commonly compared to the conventionaltypes noted above, particularly in the medium andlarge ratings. Both generators are self-excited andhave a self-regulated excitation system. For the mainparameters and general operating conditions, refer toBS 4999-140.
Acoustic enclosure
To minimize noise pollution caused by a DG set and toalso meet with OSHA* and CPCB** noise emissionnorms, it is imperative to suppress noise emission at thesource. To meet this requirement, acoustic enclosuresare provided to house the DG set, batteries, fuel tank,electrical power panel and other accessories as necessary.Such enclosures may usually possess the followingfeatures,
• Adequate ventilation for fresh air inlet (through apressure fan for forced drafts) and hot air outlet(usually through radiator fan for induced drafts) toavoid derating or any other adverse influence on theperformance of the machine even under extremeweather conditions.
• Enclosure can be equipped with natural or forcedcooling, depending upon the size of machine (seeSection 1.16). Separate duct can also be provided forventilating hot air exhaust for air cooled engines andradiator duct for water cooled engines.
• Separate provision is usually made for engine airfilters to suck fresh air directly from the atmosphere.
• For outdoor machines the enclosure is made weather-proof (see Chapter 13)
• Sufficient space is provided for maintenance work.• Muffling pads (acoustic lining – made of glass wool,
acoustic foam or felt wool insulation) are providedinside the enclosure to attenuate sound emission.
In this fashion even a whole DG room can be madeacoustically safe. Figure 16.2(a) shows a medium sizeDG set on a mobile trolley and Figure 16.2(b) illustratesa simplified view of its acoustic enclosure. Figure 16.2(c)shows when it is floor mounted. The engine exhaust canbe adjusted inside or outside the enclosure as convenient.
The recommended maximum permissible sound
1560
150052
50
25
0
750
0
Spe
ed (
rpm
)
Drooping curveof the engine
25 50 75 100% Load
Freq
uenc
y (H
z)
Figure 16.2 Typical speed–load characteristics of a 1500r.p.m. engine with 4% droop
*OSHA – Occupational Safety and Health Administration, USA (Section 7.9).
**CPCB – Central Pollution Control Board, India.
Figure 16.2(b) Inside arrangement of the acoustic enclosure
Hot air outlet chamber
Fresh air inlet chamber
Hot
air
outle
t
Rad
iato
r
EngineAlternator
Fres
h ai
r in
let
Insulatedseparator
EnclosureSilencer
Canvasduct
Figure 16.2(a) 125 kVA DG set on a mobile trolley with weather-proof acoustic enclosure (Courtesy: Kiran Engineering Enterprises)
The governor can be set to make the machine run ata constant speed, even on load variations, with extremelyquick and almost instantaneous speed control, and thusmaintain a near-zero DN. In a parallel operation they canalso control load sharing automatically and accurately.Power grids, receiving power from different sources, areextremely susceptible to frequency variations. Even asmall Df of the order of 0.5 Hz, may cause the system to

Captive (emergency) power generation 16/581
pressure level should be less than 75 dB (Section 7.9) at1 m from the enclosure surface for open installations(when DG set is not installed inside a room). When theDG set is installed inside a building room this distanceshould be reduced to 0.5 m from the outer surface of theroom. For testing of noise level see Section 11.4.7. Forspecial locations calling for more silent operations theacoustic treatment of the enclosure or the room may beimproved so as to contain the sound emission to thedesired level.
Noise emission norms are gradually becomingimperative for one to comply with. Many countries havemade these norms mandatory for manufacturers andsuppliers dealing with noise polluting machines. Eventhe users are obliged to take guard to comply with thesenorms.
16.3 Operating parameters
The following are some important operating parameters:
16.3.1 Residual voltage for self-excitation
The armature of the machine will normally have a residualvoltage of around 8 V (for LV machines) across theterminals when running at the synchronous speed. If not,as when the generator is operated after a long shutdown,a d.c. voltage of 12 V can be applied through a batteryfor a few seconds to obtain the required residual voltage.
16.3.2 Operating PF
Small generators such as those used for captive powergeneration are seldom used as synchronous motors orsynchronous condensers. To save on the cost of machinestheir field system is generally designed for 0.8 p.f. lagging,unless designed for another application for a differentp.f. The generator output is also defined at 0.8 p.f. laggingand rated in kVA. The 0.8 p.f. so selected is in consonancewith the average p.f. at which a power system usuallyoperates. The maximum kW rating of the machine istherefore defined by kVA ¥ p.f. The operating p.f. playsa vital role in the selection of the machine. It is desirablethat the load which the generator may have to feed has ap.f. of at least 0.8 lagging and more, but not beyond
unity. The machine may not perform well at p.fs. lowerthan it is designed for, as well as in the leading mode,because
• At lower p.fs. the field system is required to beoverexcited, which may cause excessive heating ofthe field windings.
• At lower p.fs. the machine will deliver even less thanthe theoretical output (< 3 cos )◊ ◊ ◊V I f due tohigher I2R losses, which will remain the same whilethe active component (I · cos f ) will be reducedcorresponding to the lower p.f. See also Section 23.3.
• In the leading mode the field system will be ineffective.When this is required the manufacturer must beconsulted. In the leading mode when the machine issuitable to operate such, the voltage will improve andthe machine will operate in the under-excited mode.While the field winding will now be less stressed, theleading p.f. is not healthy for the machine and theequipment connected on it because
(a) The capacitive mode will cause an over-voltageacross the machine windings during a switchingoperation (Section 23.5.1) which may damagethem particularly at the end turns.
(b) In the leading mode the harmonics, when presentin the system, will magnify and further distortthe voltage and current waveforms. The windingsof the machine are therefore more stressed due tosuch spurious over-voltages (Vh). For Vh, seeSection 23.5.2(A) and Equation (23.1).
Thus, in the leading mode the machine tends to becomeunstable. It is therefore mandatory to operate the machinewell within its stability region, i.e. between 0.8 p.f. laggingand unity, unless it is also designed for a leading mode.Every machine has its own operating parameters as shownin Figure 24.9. To obtain its best performance, it must beoperated within these parameters.
Generally, machines up to 1000 kVA are designed forthese parameters. Generators used for hydropowergeneration and operating on smaller heads may alsosometimes be required to operate in a leading mode as asynchronous condenser to improve the p.f. of the system.This may happen when the water head in the reservoirfalls below its minimum required level and is not capableof generating the required minimum power. When usedin these conditions the field system has to be designedfor both lagging and leading modes.
16.3.3 A generator as a synchronous motor or acondenser
When a generator is designed for a leading p.f. (in theunder-excitation mode) it can operate as both asynchronous motor and a synchronous condenser. Themachine is now self-starting and does not require a primemover.
• As a synchronous motor The machine is runprimarily to drive a mechanical load and is operated atthe synchronous speed and at unity p.f. The efficiencyis now better than that of an induction motor. Except
Figure 16.2(c) Floor mounted DG-set (Courtesy: JaksonEngineers)

16/582 Electrical Power Engineering Reference & Applications Handbook
in assisting the system by consuming power at unityp.f., it does not help the system to improve its p.f.
• As a synchronous condenser The machine isoperated without any mechanical loading. It is now usedprimarily to supply leading reactive power to improvethe system p.f. The machine can now be operated withcontinuously variable leading reactive power, with thehelp of automatic voltage regulator (AVR) and aquadrature droop control (QDC), and can even improvea varying p.f. of the system caused by fluctuating loads.The machine can be made to operate up to 0.1 p.f.leading (as a capacitor) without affecting its stability.The active power, however small, is delivered at 0.1p.f. and is consumed to feed its own no-load losses.
Note
When desired, the machine can also be designed as an inductor tosupply lagging reactive kVAr, with the help of AVR and QDC. Itwill serve little purpose, if used both as a motor and a condenser.Refer to Figure 16.3, illustrating the trajectory of the current phasor,I�. For the current I� at a p.f. cos f (leading),
– Active power output per phase = V ·I� cos f and– Reactive power output per phase = V ·I� sin f
We can observe that at higher leading p.fs. (region Ain Figure 16.3), while the active power will rise, thereactive power will be too low to contribute effectivelytowards the p.f. improvement of the system. This is alsotrue at lower leading p.fs. (region B). While the reactivepower will now rise, the active power will be too low, toperform any mechanical duty, the more so when part ofit will be consumed to feed its own no-load losses. Theusual practice, therefore, is to use it either as a synchronousmotor (region A) or as a synchronous condenser (regionB) at a time. Extra kVA can be built into the machinepartly to improve the system p.f. and partly to performthe required mechanical duty. The following examplewill illustrate this.
Example 16.1Consider a process plant having a connected load of 15 000kW and a running load of 12 500 h.p. at almost 0.65 p.f.lagging. Let a few large induction motors aggregating 2000h.p. be replaced by as many oversized synchronousmachines, with the purpose of improving the system p.f. inaddition to performing the motors’ duties.
Considering an average efficiency of the induction motors as
h = 92%
and p.f. = 0.9 lagging
\ Equivalent kW = 2000 0.7460.92
¥
= 1622 kW
and kVA rating at 0.9 p.f. = 16220.9
= 1802 kVA
\ Reactive kVAr = 1802 sin cos–1 0.9
= 1802 ¥ 0.4359
= 785 kVAr (lagging)
For ease of illustration, all these parameters have beendrawn in the phasor diagram (Figure 16.4). To select therating of the synchronous condensers, consider their averageefficiency as,
Figure 16.4 Improving system PF with the use of asynchronous condenser
Indu
ctio
nm
otor
sS
ynch
rono
us c
onde
nser
s
0.65*
1802 kVA
0.89*
785
kVA
r
0.9*
0.75* 1622 kW
5700
kVA
5415
kV
Ar
9325 kW
Revised load 10444 kVA
4703
kV
Ar
5415kVAr
785kVAr
1090
3 kV
Ar14346 kVA
Com
pens
ated
kV
Ar
Original load
* All angles shownas cos f
Figure 16.3 Using a machine either as a motor or as acondenser
Region ‘B’
Motormode
Region ‘A’
Low reactivepower
Low activepower
Generatormode
ff
I �
I � I �
I �
I �

Captive (emergency) power generation 16/583
h = 95%and p.f. = 0.3 leading
\ Total kVA rating = 16220.95 0.3¥
= 5691 kVA. Say, 5700 kVA
and reactive kVAr = 5700 · sin cos–1 0.3
= 5700 ¥ 0.95
= 5415 kVAr (leading)
Draw the phasor diagram for the actual load also at 12 500h.p. at 0.65 p.f.
\ Active load = 12 500 ¥ 0.746
= 9325 kW
and kVA = 93250.65
= 14 346 kVA
and reactive load, kVAr = 14 346 sin cos–1 0.65
= 14 346 ¥ 0.76
= 10 903 kVAr (lagging)
After replacing these large induction motors with as manyoversized synchronous motors, while the active load at 9325kW remains the same, the reactive load of induction motorsat 785 kVAr will be eliminated and instead a leading reactiveload of 5415 kVAr will be added. The net compensationtherefore will be
= 785 + 5415
= 6200 kVAr
leaving an uncompensated reactive load
= 10 903 – 6200
= 4703 kVAr
And an improved loading = 9325 + 47032 2
= 10 444 kVA
as against 14 346 kVA
and improved p.f. = 932510 444
= 0.89 as against 0.65
It is, however, recommended for better control and machineutilization that when the loads’ demand is for constant-speedoperation, this must be met through separate synchronousmotors at unity p.f. and the p.f. must be improved separatelythrough synchronous condensers with variable field excitation.
If the synchronous condensers are employed only toimprove the system p.f. from 0.65 to, say, 0.9 lagging, thenthe rating of the machines can be determined as follows:
Total active load = 9325 kW
\ kVA at 0.9 p.f. lagging = 93250.9
= 10 361 kVA
And reactive kVAr = 10 361 sin cos–1 0.9
= 10 361 ¥ 0.436
= 4517 kVAr
\ Compensation is required for
= 10 903 – 4517
= 6386 kVAr
Then the kVA of the synchronous condensers, operating at0.1 p.f. leading and having an efficiency of 98%
= 63860.98 sin cos 0.1–1
(Figure 16.5)
= 63860.98 0.995¥
= 6549 Say, 6550 kVA
The AVR may be designed for variable duty, for automaticcontrol of the reactive power, to the required level throughfeedback control systems. The machines will now operateonly as synchronous condensers without performing anymechanical duty.
16.3.4 Field or excitation system
Automatic voltage regulator (AVR)
This device controls the generator and maintains a steady-state armature voltage automatically within the predefinedlimits. The device compares generator voltage with afixed reference voltage and sends out a ‘differential’feedback to the static exciter that initiates a change inthe field strength to maintain the required voltage. Italso serves to control the reactive kVAr loading during aparallel operation or when the machine is being used asa synchronous condenser for reactive power compensationthrough a quadrature droop control (QDC) as noted below.
Quadrature droop control (QDC)
This is a scheme introduced in the AVR circuit to adjustthe reactive power (kVAr) of a machine during a paralleloperation or when it is being used as a synchronouscondenser. It prevents a reactive circulating current, Ic,through the armature windings when the two machinesare operating in parallel (Figure 16.21), or controls thereactive component within the required limits whenoperating on an infinite bus (Figure 16.26(a)). The limitof such circulating currents is defined to be within 5% of
Figure 16.5 Improving system PF with the use of asynchronous condenser
kVA
= 6
550
kVA
r =
638
6
kW
f = cos–1 0.1
= 84.26∞

16/584 Electrical Power Engineering Reference & Applications Handbook
the rated current of the machine. The QDC circuit isillustrated in Figure 16.6. The basic purpose of the circuitis to detect the content of kVAr being fed by the machinewhen operating in parallel. The AVR, in turn, adjusts thefield excitation to vary the operating p.f. of the machineto control the kVAr to the required level. kVAr demandand p.f. are complementary to each other. Higher the p.f.of the system lower will be its kVAr demand and vice-versa. During a single machine operation or on no-loadthe control of QDC changes over from kVAr regulationto simple voltage regulation.
If the machine operates at p.fs. lower than 0.8, theexcitation requirement of the machine would be high.This is a case of over-excitation and may damage thefield system. For such operations, the machine wouldrequire a double derating, depending upon the p.f. atwhich it has to operate, one for the lower p.f., due to thereduced active component of the current (I cos f) andthe second because of higher excitation demand. In suchcases the manufacturers may be consulted. A correctivestep, however, would be to improve the system p.f. byinstalling a few capacitor banks to achieve a system p.f.between 0.8 and 1.0.
Notes1. At high p.fs. such as under normal operation the generator
operates at a low level of excitations. During a fault, therefore,when the p.f. of the circuit falls it also causes a relative fall inthe excitation level and in turn in the terminal voltage. A lowvoltage, however, helps in containing the severity of fault.
2. Similarly, when the machine is required to operate at leadingp.fs., the field system has to be redesigned, as the normal fieldsystem, which is designed for lagging p.fs., will be ineffective,as discussed below.
3. When the machine is required for other than captive consumption,such as to export power then it must possess– specific capability to adjust kVAr demand promptly in the
face of widely fluctuating p.f. of the system. In other wordsit must have a fast operating and compatible AVR system.AVR controls the excitation and so the generator voltageand affects the reactive load sharing. A good voltage regulatormay maintain generator voltage typically within ±2% of Vrof the generator.
– The governors must be isochronous, i.e. accurate speeddroop type. A good governor may maintain speed typicallywithin ± 0.25% to ± 1% of Ns.
16.4 Theory of operation of AVR
The reference voltage Vyb is obtained from any of thetwo phases of the armature windings through a controltransformer, Tr. The current reference, Ir, is obtainedthrough a metering CT provided in the third phase andwired to the burden resistance, R, of the AVR. Based onthis, the AVR takes corrective steps by altering the fieldexcitation of the machine to adjust the load (Ir) p.f. sothat the reactive load (kVAr) supplied by the machinewill fall within the pre-set value during a parallel operation.The kVAr being supplied by the generator will influencethe setting of the AVR in the following ways:
• Unity PF (Figure 16.7(i)) The reference current irproduces a voltage Vr across the burden resistance R,which adds to the reference voltage, Vyb, at right angles.It causes a very small change in the AVR terminalvoltage, VAVR.
• 0.8 PF lagging (Figure 16.7(ii)) At 0.8 p.f. this isonly marginally more than the above.
• Zero PF lagging (Figure 16.7(iii)) Now the marginis substantial as the reference voltage Vyb and Vr addlinearly, being in phase opposition (a case of over-excitation). The resultant voltage at the AVR will behigh and current lagging, causing the field excitationto rise substantially and adjusting this to the requiredvalue to make the machine share the desired kVArloading. The QDC in the AVR circuit thus helps
QDC
Controltransformer
Vyb
R
Vr
VAVR
Tr
I r
i r
CT
R
Generatorwindings
Y
B
VAVR = Resultant voltage to AVRR = Burden resistance in AVR
Figure 16.6 A normal quadrature droop circuit (QDC)
cos f = 0.8
cos f = 0
Figure 16.7 Phasor diagrams for QDC, referred to thesecondary side of the control transformer
Vyb
Vyb
Y
R
B
VAV
R
Vrir
(i) p.f. – unityVAVR – Marginally more
(ii) p.f. – 0.8 laggingVAVR – Slightly more
Vyb
B
R
Y
Vr
ir
Vyb
VA
VR
(iii) p.f. – ZeroVAVR – Maximum
(iv) p.f. – LeadingVAVR – Diminishes
Vyb
Vyb
R
Y
B
Vrir
VAVR
VAVR
Vyb
Vyb R
Vr
ir
Y
B

Captive (emergency) power generation 16/585
maintain a p.f. balance and also the kVAr loading byvarying its excitation.
• Zero PF leading (Figure 16.7(iv)) Vr now subtractsfrom Vyb (a case of under-excitation). The resultantvoltage at the AVR reduces but the armature reactionis magnetizing as the current is leading. The AVRtherefore, is redundant as it has no control over thegenerated voltage and leads to instability. Thegenerators, designed for a lagging p.f. operation,therefore, are not suitable for leading p.fs. Whereversuch a need arises, the generator field system has tobe designed for a leading p.f.
16.5 Guidelines on the selection ofa DG set
Several factors are important in the performance of agenerator, and not the service conditions alone, asdiscussed for motors, in Section 1.6. In addition to serviceconditions, the operating power factor plays a significantrole in the selection of a DG set, as noted above. Thefollowing p.f. conditions may occur in practice, dependingupon the type of loads connected on the system. Refer toFigure 16.8.
16.5.1 PF lagging and less than 0.8
The active component of current OB reduces and sodoes the kW rating of the generator. When the generatoroperates fully loaded, the engine operates under-loadedbut the reactive component BB' rises, requiring a higherlevel of excitation (a higher field current), which maycause damage to the field system, which is designed for
0.8 p.f. lagging. It would thus require a derating of thecomplete machine indirectly. Generally, the derating maybe of the order of 15% for a p.f. of 0.6 and 8% for a p.f.of 0.7. For exact deratings consult the manufacturer.
16.5.2 PF between 0.8 and unity
The maximum kW rating of the DG set remains at 0.8 ¥kVA, even when the p.f. of the system, it is feeding, risesto unity. This is due to a limitation in the engine capacity,which is normally selected for only 0.8 ¥ kVA (kW = p.f.¥ kVA). At higher p.fs., while the active component OAof the revised current OA'' remains the same as at 0.8p.f., the generator will draw a lower current at ¢¢IOA andoperate under-loaded, while the engine will be fully loadedand the DG set will deliver its optimum rated output. Fora resistive load of 100 kW, for instance, operating atunity p.f., a generator rated for 100 kVA is not suitablebecause the kW rating of the engine for a 100 kVA setwill be only 0.8 ¥ 100 i.e. 80 kW.
\ The DG set (at least the engine) for such a load mustbe selected for 100/0.8 or 125 kVA.
16.5.3 PF leading
A generator is normally designed for a lagging p.f., andis not suitable to operate at leading p.fs. At leading p.fs,the armature reaction becomes magnetizing, and the fieldsystem loses its control over the terminal voltage. Duringa leading p.f., therefore, the terminal voltage rises rapidly,as the field system becomes redundant, rendering themachine unstable. The field current reduces as the leadingp.f reduces. When the leading p.f. reduces further, sayfrom OC to OC¢ (Figure 16.8), the field current (excitation)reaches almost zero, a condition known as self-excitation.This is the critical point of the AVR when it will losealmost all its control. Any further reduction in the leadingp.f. will cause over-excitation, causing the voltage torise steadily without any control. Leading p.fs. thus causeinstability and rapid voltage rises.
The above situation is, however, found when themachine is run singly. When it is operated in parallelwith another source, the field excitation will not influencethe output voltage, as it will adjust only its operating p.f.(Section 16.9.1 B-2 and D-2). A difference in excitationbetween the two machines when operating in parallelwill cause a circulating current Ic (Figure 16.15). It willadd to one machine and subtract from the other, dependingupon which machine is relatively overexcited, comparedto the other. The QDC, as discussed in Section 16.3.4,will play the required role to limit the reactive loading ofthe two machines within permissible levels, when such asituation arises.
16.6 Types of loads
The p.f. varies with the type of load. Here we discuss thelikely loads, their behaviour and precautions that mustbe taken when selecting a DG set for various types ofloads.Figure 16.8 Effect of PF on the output of a DG set
C ¢ Trajectory for maximumgenerator current, OA¢
C
3
2
1
BO
B ¢
A ¢
A≤f1
f
f2 A
cos f 1 < 0.8
0.8
£ co
s f
£ 1
cos
f2 –
Lea
ding
OA – Maximum active component of generator = 0.8I �
AA ¢ – Maximum reactive component of generator = 0.6 I �
(if OA¢ = I �)

16/586 Electrical Power Engineering Reference & Applications Handbook
16.6.1 Linear loads
Such as motors (not really but can be considered sobeing balanced loads), heating loads, capacitor andincandescent lighting loads etc. Of the linear loads, thefollowing will require special consideration.
Motor loads
These are highly inductive and cause heavy inrush currentsduring a switching operation, depending upon the typeof starting being adopted. The generator being a highimpedance machine, application of such high currentloads will cause a heavy voltage dip, which can be up to10–15% of the rated voltage, until the AVR acts to restorethe pre-set value of the terminal voltage. Althoughrestoration of the rated voltage is rapid due to a lowresponse time of the AVR (of the order of 0.5–1 second)the generator is required to supply a much higher current,at least for this duration. Consideration must be givenfor all such loads on the system and their switching currentsat the time of selecting the generator rating. A generatoris generally suitable to carry a momentary but infrequentcurrent inrush up to 2 to 2.5 times its rated current forhardly 10 seconds.
Resistive loads
When the p.f. of the load is more than 0.8, select anengine of a higher rating, as noted earlier.
Capacitive loads
These are used for improving the p.f. of the system.When they are installed in the circuit, they must beswitched OFF with the loads, to avoid a leading p.f. Butit must be ensured that the p.f. of the system does not fallbelow 0.8, otherwise it would over-load the generator aswell as its field system.
During a switching operation, the capacitive reactanceof capacitors and inductive reactance of the generatormay resonate and cause a voltage surge in the fieldwinding, as a result of transformer coupling between thearmature and the field. This may damage the bridge diodes.The practice of the leading manufacturers is to provide asurge suppression device in the rectifier assembly toprotect against such voltage surges.
16.6.2 Non-linear loads
• Loads of rectifier, thyristor, UPS (uninterrupted powersupply) and battery chargers etc.
• Fluorescent tube lights.• All such loads that have non-sinusoidal waveforms.
All these loads cause a distortion in their pure sine wavecurrent waveforms. These distortions are termed‘harmonics’ and such loads ‘non-linear loads’. Thyristorand rectifier loads fall into this category and affect thesinusoidal waveform of the generator voltage and distortit. Typical voltage distortions in the output supply of amachine as a consequence of current distortions, causedby such non-linear loads are shown in Figure 16.9 for a
particular type of generator whose windings have a pitchfactor of 2/3 (which suppresses third harmonic quantitiesand are termed as damper windings). The magnitude ofdistortions may vary with other machines having differentwinding parameters. The distortion causes:
1 Excessive heating of magnetic cores, as a result ofharmonic frequencies due to hysteresis and eddycurrent losses (Equations (1.12) and (1.13)). Alsosee Section 23.5.2(C).
2 Over-loading of neutral conductors due to thirdharmonic currents flowing through the neutral. Thesize of the neutral must be increased by 150–200%of the normal size in such cases, depending uponthe severity of the harmonics.
3 Higher voltage stresses, Vh (Equation (23.1)) maylead to dielectric breakdown.
4 Ageing of insulation of the generator and otherequipment connected to such a system.
5. Noise and resonance problems (Section 23.5.2(D))in the electrical distribution and communicationnetworks.
6 Problems during a parallel operation due to distortedquantities of currents and frequencies. Non-
24
22
20
18
16
14
12
10
8
6
4
2
0
% V
olta
ge d
isto
rtio
n
6–Pu
lse-
thyr
isto
r driv
e
3–Puls
e-Te
lecom
mun
icatio
ns
Fluorescent tube lig
hting
6–Pulse-telecommunications
12–Pulse-telecommunications
25 50 75 100
% Non-linear load
Winding parameters;Pitch factor – 2/3Sub-transient reactance, ¢¢x d – 12%
Figure 16.9 Voltage distortion caused by different types ofthyristor drives (with the use of IGBTs, however, the distortionwould be greatly reduced). (Courtesy: Crompton Greaves)

Captive (emergency) power generation 16/587
sinusoidal current will cause a non-linear impedance(mostly reactive) voltage drop on load in thegenerator windings. The terminal voltage will alsocontain harmonic quantities. It is possible that evena fast-responding AVR may not be able to maintainthe required sinusoidal voltage waveform in thewhole cycle and cause circulating currents.Generator manufacturers recommend that not morethan 40% of such loads be connected on the systemat a time, when the remaining loads are linear. Tosuppress the third harmonics, use of Y/D or D/Ytransformers is common to feed such loads andfilter out the third harmonics. For more informationrefer to Section 23.6.1.
For all such loads, the machines will require a derating.For appropriate selection it is therefore essential first todetermine the content and magnitude of harmonics andthen to consult the manufacturer for the selection of themachine. To determine the magnitude of harmoniccontents, refer to Section 23.7.
16.6.3 Special loads
Loads of welding sets, which have intermittent duty cycles,are mostly single phase, cause low p.f. and stress thegenerator windings intermittently. Unbalanced loads, suchas single phase loads, distributed unevenly cause currentunbalance and low p.f.
All loads that may overstress the generator windingsfall in this category and call for special consideration.The manufacturer must be consulted for the right choiceof machine.
There are no ready-made formulae to deal with sucha situation, except experience. It will largely depend uponthe skill of the engineer to make the right choice ofmachine to meet the requirements in consultation withthe manufacturer and also observing certain disciplinesas noted above, such as maintaining the p.f. between 0.8lagging and unity, suppressing harmonics as far as ispractical, and maintaining a balance of loads. It is alsodesirable that neutrals are not inter-connected when morethan one machines are operating in parallel to eliminatecirculation of third harmonic currents. Also see Section16.13.2.
16.7 Starting of a DG set
16.7.1 Through an auto-mains failure (AMF)scheme
This is a common scheme to bring a standby DG set online automatically on the failure of the main source ofsupply with the help of a battery backed-up ignitionscheme. On the failure of the main supply, generallythree ignition pulses are given to the engine to auto-startthe machine. If the engine fails to start at three attempts,a further pulse is blocked. To start, the engine is madeautomatic. The generator excitation or the field current isalso pre-set, which adjusts the generator voltage to therequired level automatically through the AVR. Provision
is also made to start it manually in case the AMF schemefails and to also facilitate routine testing and give it moreflexibility. The scheme may be briefly described as follows(see the control and scheme drawing in (Figure 16.10).
Control supply
A battery backed-up d.c. source of control supply is providedfor the AMF panel and engine ignition. The control scheme,as illustrated, generally consists of a 220 or 240 V a.c.source of supply, with a transformer rectifier unit, to providea 24 or 48 V d.c. control voltage, to charge the battery asrequired and a battery back-up of suitable capacity.
Selection of scheme
Auto or manual selection (switch Sw2) A switch Sw2 isprovided for the selection of the engine to be started inauto or manual modes:
• Auto mode In auto mode the engine startsautomatically on failure of the a.c. bus voltage, Vb,through an under-voltage or bus voltage relay (Relaycode 27) (Figure 16.10). The relay is provided on thegenerator control panel with time delay contacts. Timedelay is provided to allow a pause to the generator ifthe normal supply is quickly restored.
• Manual mode
Local controlIn manual mode, the engine can be started and stoppedlocally, through a pair of start and stop push button Nos17 and 18, provided on the AMF panel (Figure 16.11).
Local remote control (switch Sw3)This is provided to facilitate the manual start and stop ofthe engine from a remote point such as through a remotestation.
Three-attempts start
A three-attempts start facility is provided through asequential timer (ST) in auto mode. A starting relay (SR)gives three ignition impulses to the engine. If the enginefails to start at three consecutive attempts, the startingrelay (SR) automatically locks-out and emits no furtherignition impulse. This feature is essential to protect theengine against a possible hunting and a drain of the battery.
Switching off
Bus voltage relay (Relay code 27) provides an impulseto the generator trip circuit as soon as normal supply isrestored. The generator falls out of the circuit automaticallyafter a pause of �10–30 seconds, and the engine stops.The relay now also has a delayed feature as it had duringthe start, to allow a pause to the main supply in case themain supply fails quickly again.
Lubricating oil
An interlock is provided through a centrifugal type of

16/588 Electrical Power Engineering Reference & Applications Handbook
pressure switch (PS) to trip the engine in the case of lowlube (lubricating) oil pressure during a run. Since duringa start oil pressure is not built up, a timer, T1 is introducedto bypass the trip interlock and avoid a false trip. A relay(contactor), d1, is used to provide lube oil pressureinterlock.
Fuel oil solenoid valve (SV)
This is to cut off the fuel supply to the engine on a tripor a normal stop of the engine.
Speed and voltage control
Push button Nos 22 and 23 may be provided on the AMFpanel and also on the remote panel to raise and lower the
speed and voltage, when required to control the speed(f1) and voltage (E1) of the generator in order for it to besynchronized with another generator or an infinite bus.
Figure 16.10 illustrates a typical scheme incorporatingall these features and interlocks.
NoteThe above controls can also be achieved more precisely and almostinstantly by applying the same logic with the use of PLCs, asdiscussed in Section 16.12.
16.8 Protection of a DG set
16.8.1 Alarm and annunciation (see Figure 16.10)
Some or all of the following alarms and annunciations
FuseSwitch (Sw1)
1-f
A.C
.sup
ply
( Vb)
Phase controlledvariable voltage
rectifier
SR
F 2
SR
V
F1
24/4
8 V
d.c
. con
trol
sup
ply
24/4
8 V
bat
tery
Con
trol
supp
ly o
n
A
Lube
oil
PS
Clo
se p
ress
ure
low
d 1
27 R
elay
(DG
vol
tage
)
d1 ST SR F 4
SR
Toenginestarter
SR
F 3
Sw22
Sw3
ST
A
1
A
1
B
Automan.
2
B
Aut
o st
art
Rem
ote
star
t PB
(17
)
Sta
rt P
B (
17)
Loca
lre
mot
e
Low oilpressure
(PS)
Sequentialtimer (start)
Startingrelay (SR)
AMF SchemeScheme for a battery backed DC control supply
SR T 1(inst)
T 1(inst)
d 1
Bkr‘off’
Stop PB(18)
Stop PBRemote
T1
Bkr‘off’ T1
Timer lube oilpressure interlock
by-pass
AMF scheme (Contd.)
Electricalprotection
Mec
hani
cal p
rote
ctio
ntr
ip–i
nter
lock
sa.
Hig
h w
ater
tem
p.&
b. o
ver
spee
d et
c.
Aut
o–st
op(R
elay
-27)
To fuel oilsolenoid
valve (SV)Engine speed
raise/lower
Localremote
4
D
5
E
6
F
3
C
PB
low
er (
23)
PB
rai
se (
25)
PB
rai
se (
22)
PB
low
er (
23)
PB
rai
se (
22)
PB
low
er (
26)
PB
rai
se (
25)
PB
low
er (
26)
Gen. voltageraise/lower
Figure 16.10 (Contd.)
NL

Captive (emergency) power generation 16/589
may be provided on the AMF panel, depending upon thesize of the DG set and the type of load it has to feed toforewarn the operator, and prevent a trip:
Mechanical faults
(a) Engine fails to start(b) Engine overspeeds(c) Engine high water temperature and high lube oil
temperature(d) Low level of fuel(e) Low lube (lubricating) oil pressure.
Electrical faults
(a) Over-current alarm(b) Battery charger problems(c) Over-current and ground fault(d) Reverse power supply(e) A fault condition in the differential scheme(f) Breaker trip
Figure 16.11 illustrates a general arrangement of such anAMF panel and the above alarm and annunciationprovisions.
16.8.2 Electrical protection and metering
The following protections and metering are considerednecessary for a DG set:
1. For small ratings (say, up to 150 kVA)
(a) Short-circuit protection – through HRC fuses(b) Over-current-cum-short-circuit protection, through
thermal over-current and built-in short-circuit releases.Figure 16.12 illustrates a general protection andmetering scheme.
(c) A kVAr meter to indicate the reactive power of thecircuit and to take corrective steps, when necessary.
2. For medium ratings (say, up to 1000 kVA)
(a) Voltage-controlled over-current and ground faultprotection (Relay code 51N/64) By a three-polevoltage controlled definite time delay relay with acurrent setting of 50–200% and a time delay range of0.1–1 second. The relay is typical with a combinationof an over-current-time relay and an under-voltage(u.v.) supervision unit. The purpose of the u.v. unit isto detect a u.v. due to a ground fault in the machine.During a ground fault the relay switches over
1.E
ngin
e fa
ilsto
sta
rt
2.E
ngin
eov
ersp
eed
3.E
ngin
e hi
ghw
ater
tem
p
4.Lo
w le
vel
of fu
el
d 6 d 8 d 9 d 10
AMF scheme
Alarm & annunciation scheme
Hooter
Test PB(19)
AcceptPB(20)
ResetPB(21)1 2 3 4 5 6 7 8 9 10 11 12
Eng
ine
fails
to s
tart
Eng
ine
over
spe
ed
Eng
ine
high
wat
er te
mp
and
high
lube
oil
tem
pera
ture
Low
leve
l of f
uel
Low
lube
oil
pres
sure
O/C
ala
rm
Bat
tery
cha
rger
trou
ble
O/C
&G
/F r
elay
trip
R.P
. rel
ay t
rip
Diff
eren
tial r
elay
trip
Bre
aker
trip
Spa
re
EOS EOH LLS
STTDC d
6
d8
d9
d10 d1
51A
51N
/64
32 87 86
Contact development(Sw2)
Contact development(Sw3)
1–A 2–B
Auto Close Open
CloseOpenManual
5–E 6–F3–C 4–D2–B1–A
Close Open Close
OpenCloseOpen
Local Close Open
CloseOpenRemote
Open
Close
Knobposition
Figure 16.10 Typical control and annunciation scheme for an AMF panel

16/590 Electrical Power Engineering Reference & Applications Handbook
instantaneously to a lower response current value andeffects faster tripping. Typical characteristics can be– An over-load characteristic say, 50–200%, matching
the thermal withstand characteristic of the generator.This operates during an over-load condition whenthe generator voltage is normal.
– A ground fault characteristic determined by the
u.v. unit monitoring the generator voltage. Duringa ground fault, causing a u.v., the same over-currentcharacteristic is reduced to another set value,resulting in a faster tripping, as desired.
NoteThe relay can also be selected for a phase fault.
(b) Reverse power supply protection (Relay code 32)To detect a motoring action by a single-pole reversepower relay with a time setting of 2–10 seconds forboth active and reactive powers. The basic principleof the relay is to compare the current in any onephase with the voltage output across the other twophases. When the operating parameters exceed thepre-set values, the generator is switched OFF after apre-set delay in case the operating conditions havenot improved.
(c) Differential protection (Relay code 87) To detecta stator phase-to-phase fault by a three-pole differentialprotection relay, current setting 10–40%. For schemediagrams, refer to Section 15.6.6(1).
(d) Over-current alarm (Relay code 51A) This maybe provided to warn the operator of a likely over-loading on the generator to prevent a trip and takecorrective action, by promptly shedding a part of theload. The current setting of the O/C alarm relay is
1
2
1 2 3 4
5 6 7 8
9 10 11 12
7 8 9
10 11 12
13 16
A kW V
VFMA
22 23 17 18 25 26
3 24 14
15
19 20 21
32 33 34
35 37 38
36
24
30 31
27 28 29 4 6 5
For AMF panel For generator control panel
Legend1. Hooter2. Annunciator3. Control supply ‘on’4. Breaker ‘on’5. Breaker ‘off’6. Breaker ‘trip’7. D.C. ammeter8. kW meter9. D.C. voltmeter
10. A.C. ammeter11. Frequency meter12. A.C. voltmeter13. Ammeter selector switch14. Auto/Manual switch–Sw215. Local/Remote switch–Sw316. Voltmeter selector switch17. Start–D.G. set18. Stop D.G. set19. Test P.B.
20. Accept P.B.21. Reset P.B.22. Engine speed raise23. Engine speed lower24. Breaker control switch25. Generator voltage raise26. Generator voltage lower27. R–phase28. Y–phase29. B–phase30. kWh meter31. kVAr meter32. Over current & ground fault
relay (51N/64)33. Reverse power relay (32)34. Overcurrent alarm relay
(51A)35. Differential relay (87)36. Incomer breaker feeder37. Lockout relay (86)38. Under voltage relay (27)
Figure 16.11 Typical general arrangement of an AMF panel
Sw NL
G
C
F1
– 3
OC
RM
eter
ing
CT
s 1–
3 kWhmeter
kWmeter
kVArASS
A
VSS
V
GCF
R Y BNL
R Y B NPower diagram
Figure 16.12 Protection and metering scheme for a smallerrating DG set, say up to 150 kVA

Captive (emergency) power generation 16/591
kept lower than the setting of the O/C trip relay, say,105% for the alarm and 110% for the trip. A single-pole over-current relay with a setting of 50–200%and a time delay of 2.5–5 seconds may be consideredideal. Figure 16.13 illustrates a typical protection andmetering scheme and Figure 16.11 shows the provisionof these relays on the panel.
3. For a large power station
This is a complex subject and requires detailed engineeringand application of the various protection schemes fordifferent operating conditions. We briefly discuss belowa typical protection scheme that is generally adopted ata power station, for a large sized generator.
Normal alarm scheme
(i) Stator cooling water– Inlet temperature high– Outlet temperature high– Rectifier temperature high
(ii) Hydrogen gas– Cooler hot gas temperature high– Cooler cold gas temperature high– Common cold gas temperature high– Machine gas temperature high
(iii) Machine temperature– Collector air in/out temperature high– Generator field temperature high– Stator slot temperature high
(iv) Bearing oil temperature high(v) Vibration level, etc.
NoteSee also Section 12.8 for more details.
Generator protectionThe generator protection arrangements usually employedare as follows:
(a) Impedance protection (Relay code 21G) Impe-dance protection or distance back-up protection (alsotermed external fault back-up protection). It isemployed to protect the generator from feeding thefault on a short-circuit on an adjacent system, whichmay be hanging due to the failure of its own systemprimary protection.
(b) Anti-motoring protection through reverse powerrelay or low forward power interlock (Relay code32-G) This is meant for both active and reactivepowers. Refer to Figure 16.14. The generator acts asa synchronous motor when it is slow or the powerinput to the prime mover (steam supply to the turbinein a thermal station) falls below the no-load lossesof the generator. This is a corollary to an inductiongenerator, discussed in Section 7.21. The generatorbeing still connected to the grid will draw powerfrom the grid through its stator windings. Since thefield excitation does not change, the generator willoperate as a synchronous motor and will drive theprime mover (turbine). While the generator may notbe harmed by a motoring action, the prime movermay become over-heated and damaged.
If the field excitation is also lost, the generatorwill run as an induction motor again driving theprime mover as above. As an induction motor, it willnow operate at less than the synchronous speed andcause slip frequency current and slip losses in therotor circuit, which may over-heat the rotor anddamage it, see also Section 1.3 and Equation (1.9).
Figure 16.13 Typical power diagram illustrating electricalprotection and metering for medium rating DG sets up to1000 kVA
Diff
eren
tial
CT
s 1–
3
G
Diff.relay87G
Diff
eren
tial
CT
s 4–
6P
rote
ctio
nC
Ts
7–9
Pro
tect
ion
CT
10
Met
erin
gC
Ts
10–1
2In
terr
uptin
gde
vice
kWhmeter
kWmeter kVAr
ASS
A
VSS
V
GCF
R Y BNL
R Y B N
NL
G
G
Reversepowerrelay32
U/Vrelay27
O/C &G/Frelay
51N/64
G
Overcurrentalarm51A

16/592 Electrical Power Engineering Reference & Applications Handbook
A reverse power relay under such a condition willdisconnect the generator from the mains and protectthe machine.
(c) Loss of excitation or loss of field protection (Relaycode 40-G) Loss of excitation results in a loss ofsynchronism and causes operation of the generatoras an induction machine. It results in the flow of slipfrequency current in the rotor windings, which maydamage the rotor, as noted above.
When an induction motor runs beyond thesynchronous speed, it behaves like an inductiongenerator and feeds power back to the supply system(Section 7.21). Below synchronous speed it behaveslike an induction motor and draws power from thesupply system. This protection trips the generator insuch an eventuality and protects the machine.
The protection is usually in two steps. Alarm forunder-excitation and trip for loss of excitation. Thesituation of under-excitation is detected when thegenerator is accelerating and draws VAr from the
system in order to maintain the active power outputof the prime-mover. The resulting induced currentsin the rotor may cause dangerous over-heating anddamage the rotor. This current is of pulsating nature
Figure 16.14 A typical protection scheme for a generator ina large generating station (shown with the front view of amultifunction generator, motor and transformer protection relay)
Main BusR
Y
B
Tap off to unit auxiliarytransformers no. 1 & 2
(Figure 13.47(a))
32G
78G
81G
59G
G
CTs(Protection)
CTs(Differentialprotection)
49G
64GF
G
Exciter
Pilot exciter
AVR 87G
CTs(Differentialprotection)
CTs(protection) CTs
(Protection)G
G
Generator neutralgrounding trans-former (high im-pedance grounding)
R 51GN
64G
46G
40G
21G
G
Tap off to generator transformer(Figure 13.47(b)
21-G : Impedance protection or distanceback-up protection
32-G : Anti-motoring protection or lowforward power protection
40-G : Loss of excitation or loss of fieldprotection
46-G : Negative sequence protection49-G : ‘RTD’ protection59-G : Over-voltage/Hz protection64-G & : Generator stator ground fault51-GN protection64-GF : Field ground protection78-G : Pole slipping protection or out of
step protection81-G : Abnormal frequency operation87-G : Differential protection
Configurable LEDsfor machine and
device informationMachine and device
information LCDs
SIPROTEC7UM62RUN ERROR
Navigation
Rs 232operator interface
Operator’s functionkeys
For data entry

Captive (emergency) power generation 16/593
and depends on source impedance and generatorreactance. An over-load relay cannot detect thissituation hence loss of excitation protection.
NoteOn using two relays (32-G) and (40-G): Both relays are necessaryas both have different functions.• While an RPR is basically for the PM in case the fuel supply
(steam, diesel, oil, gas or flow of water) to the PM is disturbedand falls below the no-load losses of the generator, reversepower may flow and be detected by RPR.
• Similar situation may also arise when the field systemmalfunctions or fails completely and throws the machine out ofsynchronism.
It is therefore essential to provide both protections to identify thefault.
(d) Negative phase sequence protection (Relay code46-G) Unbalanced loads cause unbalanced currents,resulting in negative phase sequence currents. Thesecurrents are detrimental to the generator stator androtor windings (Section 12.2(v)). Their effects on agenerator are similar to those on an induction motorand the protection of a generator is the same as thatof a motor. Since unbalanced loads are naturalphenomena in a power network, they cannot beeliminated due to single-phase loads (mostly domesticand public utilities) and many industrial loads thatuse static drives and distort the sinusoidal waveform(Section 16.6.2), hence this protection.
(e) ‘RTD’ protection through warning of winding over-heating (Relay code 49-G) A generator is the heartof a power station and must not trip on momentaryover-loads. It is therefore essential that the operatingconditions of a generator are closely monitored andnormal operating conditions quickly restored, as faras possible, to eliminate a trip. The ‘RTDs’ that areplaced in the slots of the stator windings can give awarning through an audio-visual alarm scheme andthe operator can restore the normal conditions, ifpossible. The generator is allowed to exceed its ratedcurrent momentarily under the following conditions:
Time (seconds) 10 30 60 120Generator current 226% 154% 130% 116%
NoteOver-current protection is normally not provided in generator andgenerator transformers to save the machines from likely outages onmomentary over-loads and retain the dynamic stability of the system.In the event of over-loading, the normal practice is to shed some ofthe loads on the transmission network (see also power managementthrough SCADA system (Section 24.11)).
(f) Over excitation or over-volts per Hertz protection(V/Hz) (Relay code 59-G) Per unit voltage dividedby per unit frequency, called V/Hz, is proportional toflux in generator and generator-transformer cores.(See also Section 1.2, Equation (1.5) and Section6.2.2). Excessive flux can cause serious over-heatingof metallic parts and melting of generator corelaminations. (See also Section 1.6.2. (Aiv) Equations(1.12) and (1.13).) Excessive flux (V/Hz) can becaused by voltage regulator failure, load rejection or
excessive excitation. Even though V/Hz is more likelyto occur when generator is off-line, it can also happenwhen generator is on-line.
Normally a two-stage protection is provided forV/Hz protection. If V/Hz exceeds 1.18 per unit, aprotection relay trips the generator within two seconds(typical). For V/Hz 1.1 to 1.18 per unit, a protectionrelay trips the generator within 45 seconds (typical).
(g) Generator stator ground fault protection (Relaycodes 64-G and 51-GN) The neutral of the generatorstator normally operates at a potential, close to ground,through a high-impedance single-phase distributiontype transformer the secondary of which is shuntedthrough a resistor that has a voltage relay device 64-G connected across the resistor (Figure 16.40). Inthe event of a ground fault, current flows through theresistor and the relay 64-G operates due to a voltagedrop across the resistor. An over-current relay, 51-GN, connected to the current transformer in thesecondary winding of the grounding transformer isused as back-up for 64-G relay.
(h) Exciter protection Protective devices areincorporated, as required for protection of the specificexcitation system components and are supplied bygenerator manufacturers as an integral part of theexcitation equipment. Some of the protective devices are• Field ground protection (Relay code 64-GF)
The generator field winding is electrically isolatedfrom ground. Therefore one ground fault in therotor windings will usually not damage the rotor.However, two or more ground faults in the rotorwindings will cause magnetic and thermalimbalances, which may result in localizedheating and may damage the rotor. Protectionprovided in the excitation system is used to tripthe generator in the event of a ground fault in therotor windings.
• Field over-heating protection This is a part ofexcitation system to prevent the field from prolongedover-current through an alarm or a signal. It willtrip the generator only if it is absolutely essential.The field winding can carry momentary over-currents for a short period, expressed in terms offield voltages, as noted below:
Time (seconds) 10 30 60 120Field voltage 208% 146% 125% 112%
(i) Pole slipping or out of step protection (Relay code78-G) This is a protection against loss ofsynchronism. It can occur as a result of steady-state,dynamic or transient instability or due to loss ofexcitation or out-of-phase synchronism. Out-of-step(phase) operation can result in high peaks of currentand frequency, and cause winding stresses, pulsatingtorque and mechanical resonance. All these mayendanger the generator windings. Loss of excitationrelay may provide detection of such a situation, butit may not be reliable under all conditions. An MHO-type relay is generally used to protect the generatorfrom such a situation.
(j) Abnormal frequency operation (Relay code

16/594 Electrical Power Engineering Reference & Applications Handbook
81- G) For a generator connected to a power system,abnormal frequency operation may be the result of asevere system disturbance. An isolated unit, however,can operate at a low or high frequency, due to anincorrect speed control adjustment or a malfunctioningof the speed control device.
The generator can tolerate under-frequencyoperation for long periods, provided that the loadsand the voltage are proportionately reduced. It canalso tolerate over-frequency operation, when thevoltage is within the permissible limits.
If a system disturbance requires extra generatingcapacity, the generator may drop speed, reducing thefrequency proportionately. The under-frequency relay81-G will detect such a condition and operate asystematic load shedding in a programmed mannerin order to meet the load demand. If the abnormalcondition persists, the generator is taken off the mainsupply system.
(k) Differential protection (Relay code 87-G) (forscheme see Section 15.6.6(1)) High impedancedifferential protection to detect stator phase-to-phasefault. Since the generator bus and breaker (if provided)fall in the same circuit the relay protects them also(see Figures 16.14 and 13.21).
Depending upon grounding system adopted, it mayalso detect a ground fault. For example, when thegenerator itself is grounded or even if it is operatingin parallel with another generator that is grounded.When so a separate stator ground protection can beeliminated.
(l) Surge protection This is similar to that for motors(Sections 17.10 and 17.10.3).
Figure 16.14 illustrates a typical protection schemecovering these protections.
Notes1. These are vital protections. However, depending upon system
demands more authentic protection scheme can be tailored.2. Relay code numbers are according to ANSI designations. For
details refer to Table 13.18.3. With the availability of state-of-the-art microprocessor based
digital relays (IEDs*) it is now possible to monitor, operate andprotect the machines from a remote control station with thehelp of serial data transmission (Section 24.11.5) viacommunication interfaces using different protocols.
16.9 Parallel operation
16.9.1 Theory of parallel operation
The performance of a generator varies with its operatingconditions. For instance, it is different on no-load andon-load when running in parallel with another generator.Similarly, it is different when running in parallel with aninfinite bus. For a better understanding and more clarityof the subject we analyse below, the performance of anincoming generator when it is required to run in parallelwith another generator or with an infinite bus. Consider
two generators G1 and G2, operating in parallel, asillustrated in Figure 16.15, having the followingparameters:
PM1, PM2 – Prime moversZ1 (R1 + JXd1) = Impedance of generator 1Z2 (R2 + JXd2) = Impedance of generator 2
NoteFor more clarity, particularly for a better illustration, we considerimpedances rather than only synchronous reactances, although theresistances, being small, are usually ignored.
ZL (RL + JXL) = impedance of the loadE1, E2 = e.m.fs. generated by the two generatorsEc = residual voltage across the internal circuit
of the same phases of the two generators,giving rise to circulating currents.
Vb = bus voltagef1, f2 = frequencies of the two machinesfb = frequency of the busI1, I2 = Load sharing by the two generatorsIb = total load currentIc = circulating current within the two
generators’ circuit.
Consider voltages E1 and E2 being equal and in phase,a condition necessary for running the two generators inparallel, i.e.
E E E1 2 c – = = 0 (i)
E I Z V1 1 1 b – = ◊ (ii)
E I Z V2 2 2 b – = ◊ (iii)
In what follows we consider G1 as the incoming machineand G2 as the machine already running, connected to thebus.
I When running in parallel with another machine
A Performance on no-load1 By changing the driving torque or power input
Suppose the driving torque of G1 is increased. G1will accelerate faster than G2 and E1 will advance E2vectorially by Dq, the magnitude remaining same(Figure 16.16(a)) and
E E E1 2 c – = (iv)
Ec will cause a circulating current, Ic. The circuitdiagram is drawn in Figure 16.16(b) where
I E EZ Z
E
Z Zc
1 2
1 2
c
1 2 = –
+ =
+ (v)
Since Z1 and Z2 are highly inductive, Ic may beconsidered lagging Ec by almost 90∞, as shown inFigure 16.16(a) and
V E I Zb 1 C 1 = – ◊ (we have considered the voltageof the G2 bus as Vb)
= E I Z2 c 2 + ◊* IED – Intelligent electronic device.

Captive (emergency) power generation 16/595
If the two generators are identical, so that Z1 = Z2, then,
V E Eb
1 2 = + 2
(vi)
InferenceG1 will generate an excess power compared to G2.Therefore while G1 will operate as a generator, G2,receiving power from G1, will operate as a synchronousmotor. Since G1 is over-loaded compared to G2, itwill tend to retard, and G2, receiving power from G1,will tend to accelerate. The net effect would be thatboth generators will tend to synchronize on their ownonce again.
2 By changing the excitation (field current) In theabove case if the field excitation of the incominggenerator, G1, was increased, causing the terminalvoltage E1 to rise to ¢E1 , so that ¢E E1 2 > .Then alsoa residual voltage, Ec, would appear across the internalcircuit of the two generators. The only differencewould be that now they will be in phase but differentin magnitudes, i.e.
¢E E E1 2 c – =
IE
Z Zc
c
1 2 =
+
Ic will lag Ec by almost 90∞ and lead E2 by almost90∞ (Figure 16.17). The net effect will be ademagnetizing armature reaction for G1, tending toweaken its field and diminish ¢E1 , whereas for G2 itwould be a magnetizing armature reaction, tendingto strengthen its field and enhance E2. Both machineswould thus tend to synchronize once again. G1 willnow also operate as a generator and G2 as asynchronous motor and
V E I Zb 1 c 1 = – ¢ ◊
= + 2 c 2E I Z◊If Z1 = Z2
then VE E
b1 2 = + 2
¢(vii)
Figure 16.15 Parallel operation of two generators
PM1
G1
PM2
G2E1 E 2
R 1
Xd 1
R 2
Xd 2
I2
I CI C
IC
I1
V b
RL
XL
I b
Common bus atfrequency fb
Load
Figure 16.16(a) Effect of increasing the driving torque on no-load (magnified representation)
G 2 slower G1 faster
E1
E2Motoring action Generating action
Note Magnitude of E1 and E2 remains unchanged* EC is not appearing at 90∞ with IC because of IC · R 1 which is negligible but we
have considered it to be significant for better illustration
IC
Dq
EC
�90∞
IC · R1
90∞I C
·
Z 1 =
E
C
I C ·
Xd1
I C ·
Xd2
IC · R2 E2
I C · Z 2
= E
C
V E I Zb 2 C 2 = + ◊ V E I Zb 1 C 1 = – ◊
**
Z1 Z2
R 1 Xd1 IC R 2 Xd 2
EC
Figure 16.16(b) Residual voltage across the internalcircuit of generators G 1 and G 2

16/596 Electrical Power Engineering Reference & Applications Handbook
B Performance on-load1 By changing the driving torque or power input
The performance of two or more generators, runningin parallel, on-load is not very different than analyzedon no-load. A generator running in advance comparedto the others would share a higher load than thoserunning behind. The performance can be analysedmore easily by referring to Figure 16.16(a).
For more clarity, consider any of the two generatorsto be identical and running at the same speed,generating the same voltage and sharing an equalload of, I at a lagging p.f. cos f, i.e.
E1 = E2, Z1 = Z2,
I1 = I2 = I, and
I1 + I2 = 2I, as illustrated in Figure 16.18.Say, G1 is made to run a little too fast compared to
G2, by increasing its input power. A residual voltage,Ec, will appear across any two identical phases, causinga circulating current Ic, lagging Ec by almost 90∞. Thephasor diagram will change to Figure 16.19, which issimilar to the phasor diagram of Figure 16.16(a) exceptthe additional current phasors ¢ ¢I I1 2 and . G1, which isrunning ahead, will operate at a better p.f. than theother and share an extra load, equivalent to thecirculating current Ic, such that it is ¢I I I1 1 c = + . Itis possible when G1 is operating at a higher p.f., i.e.cos f1 > cos f and ¢I I I2 2 c= – , and G2 is operatingat a lower p.f., i.e. cos f2 < cos f and,
¢ ¢I I I I1 2 1 2 + = + , i.e. the total load current remainingthe same.
An unequal load sharing may be desirable whenthe generators are of unequal rating or for some reasonsone of them is to be loaded more or less than theother. The desired load sharing can be achieved byvarying the phase shift between the excitationvoltages ¢ ¢E E1 2 and of the two generators as illustratedin Figure 16.19. The higher the phase shift d, thehigher will be the load shared by the generator that isrunning in advance, compared to the other. In whatfollows we consider G1 to be faster than G2. The phaseshift can be altered by changing the engine input power.The load sharing can theoretically be determined withthe help of speed ( f )-load or drooping characteristicsof the prime movers as illustrated in Figure 16.20.
Consider the speed–load (drooping) characteristicsof the two machines as shown in Figure 16.20. Forease of illustration, the slopes have been exaggerated.Normally they are within 4% of the rated speed, as
IC · R 2
E 2
I C
G 2 – Synchronous motor G1 – Generator
� 90∞
IC · Xd2
I C · Z
2
IC · Z
1
EC ¢E 1
IC · R1
IC · X d1
E1EC
Figure 16.17 Effect of varying the excitation on no-load
VE
IZ
b
2C
2
= + ◊
V E I Zb
1C
1
= – ¢ ◊
E1 = E2
I · Z
I · X
d
I · R
Vbq
fI1 = I
2
2I
When G1 and G 2 are sharing equally
Figure 16.18
¢E1
¢E2
¢I2 = + 1 2I I
¢I I I1 1 c = +
¢I I I2 2 c = –
ECIC
d
f
q
f 1
q 2
q 1
f 2
V b
�90∞
I1 = I2
–IC
+IC
E1 = E2 trajectory
EC
E1 = E2
When G1 is running faster than G2, it shares more load
cos f1 > cos f – p.f. improves.
cos f2 < cos f – p.f. worsens
Figure 16.19 Variation in load sharing by varying thedriving torque on load
I I I1 1 2 = + ¢ ¢
¢I1

Captive (emergency) power generation 16/597
discussed earlier. When both machines are loadedequally, the total load may be defined by the loadline AA¢ at the bus frequency, fb. When the powerinput to PM1 is increased, so that the drooping curveAO shifts to curve BO¢, it shifts the load line AA¢also to BB ¢, so that the total load shared by the two
machines will still remain the same. The load sharedby G1 is now more than before at ¢P1, so that ¢P P1 1 > ,and by G2 less than before at ¢ ¢P P P2 2 2 so that < . Thegenerators now operate at a higher system frequency,
¢fb . If the system frequency is required to remainconstant at fb it will be essential to reduce the powerinput to PM2, so that the drooping curve of PM2 shiftsbelow to O¢¢C ¢ and the load line to CC ¢ at the originalfrequency fb, delivering the same total load yet again.The load shared by G2 is now still lower than before.
The load sharing by the two machines can thus bevaried by shifting the drooping curves of the primemovers by altering their power input.
2 By changing the excitation (field current) Nowthat the engine input is not varied, there is no variationin the load sharing by the two machines. It is thebasic theory of change in the field excitation. Sincea change in the excitation causes a variation in thegenerated e.m.fs. (E1 and E2), the variation in voltagecauses a corresponding rise or fall in the reactivecomponent of the current. EI cos f will remain thesame, except the variation in the copper losses ( ),c
2I Rwhich may vary the load sharing, marginally up ordown, depending upon whether it supplies Ic orreceives. For instance, at higher excitation, the e.m.f.will rise and so will the load current, but at a lowerp.f. And the generator will have to feed extra lossesand thus share a marginally lower load than previously.
To illustrate the above, consider Figures 16.15 and16.21. Assuming that both machines were equallyloaded, an increase in excitation of G1 will increaseE1 to ¢E1 , which will tend to increase Vb as noted inEquation (vii). A corresponding decrease in excitationof G2 from E2 to ¢E2 can, maintain the same level ofVb, as illustrated in Figure 16.21. The phasor differencebetween ¢ ¢E E1 2 and , i.e. Ec will give rise to a
Generator – G2Primer mover – PM2
Generator – G1Primer mover – PM1
0¢
0≤
B ¢
A ¢C ¢
PM2 line
A
B
C
P1
PM 1 lin
e
Spe
ed o
r f b
µ P
ower
inpu
t(t
orqu
e)
Load G2Load G1
¢¢P1 ¢¢P2
¢P2¢P1
fb
¢fb
Load line AA ¢ P1 = P2 = Pand P1 + P2 = 2P
Load line BB ¢ ¢P1 + ¢P2 = 2P
Load line CC ¢ ¢¢P1 + ¢¢P2 = 2P
P2
Figure 16.20 Drooping curves of two machines,illustrating load sharing when running in parallel
0
Figure 16.21 Variation in the load currents with a change in the field excitation on load
¢
I1 · Z1 = I2 · Z2 E1 = E2
q = q1 = q2
b
I · R
I · X
d
Vb
¢ ◊I
R1
R1 = R2 = R (assumed)
2I remains the same
I1 = I2 = I
C 1
+IC
–IC
C
EC
C 2
f = f1 = f
2
a
IC
�90∞
ab = active component remains the same i.e.,I · cos f = ¢ ◊ ¢ ¢ ◊ ¢I I1 1 2 2 cos = cos f fbc, bc1 and bc2 = only reactive components varyEc is same as DV
¢E 2 ¢E 1
¢q 2
¢I 2
¢I1
q1¢ I 1
· X d
¢I 2·X
d
¢ ◊Iz
11
EC
¢ ◊IR2
¢f2
¢f1
¢ ◊I z2 2

16/598 Electrical Power Engineering Reference & Applications Handbook
circulating current Ic, lagging Ec by almost 90∞, asnoted above and illustrated in Figure 16.21. The loadsharing can now be computed as follows.
Assuming that the above change in the excitationcauses the following changes in the basic parameters
(i) I I f1 1 1 to at a p.f cos ¢ ¢.
(ii) I I f2 2 2 to at a p.f cos ¢ ¢.
then ¢I I I1 1 c = +
¢ ¢I1 1 cos f = I1 cos f 1 = I cos f
¢I I I2 2 c = –
¢ ¢I2 2 cos f = I2 cos f 2 = I cos fThe active components will thus remain same, andonly the reactive components ¢ ¢I1 1 sin f and
¢ ¢I2 2 sin f will vary.
NoteIf the machines were loaded unequally before making a change inthe excitation, the same ratio of loading would continue even afterthe change in the excitation of both machines provided that Vbremains the same,
V E I Z E I Z
E I Z E I E
b 1 1 1 2 2 2
1 1 1 2 2 2
= – = –
= – = –
◊ ◊
¢ ¢ ◊ ¢ ¢ ◊
If E1 rises further, it will do so at still lower p.fs. and E2 will haveto be further reduced to maintain the same Vb at yet higher p.fs. tomaintain the same level of active component and vice versa.
Conclusion1. With the change in excitation, only the reactive power,
kVAr and the terminal voltages E1 and E2 can be alteredwithout altering the active components of the loadcurrents or the power shared by the two machines. Asdiscussed in Section 16.3.2, a generator is designed fora particular p.f. (0.8 lagging), having a defined valueof kVAr. A reactive power higher than rated wouldcause reactive over-loading of the machine and causereactive circulating currents. It would seriously affectthe performance of the machine. There is thereforeonly limited scope in varying the excitation level of agenerator.
2. The machines through their AVR controls would tryto equalize the voltages once again, the machine thatis ahead by weakening and the machine that is behindby strengthening its field strength. When the incomingmachine is hooked on an infinite bus only thismachine’s field strength will match with the bus voltageand equalize with it.
II When synchronizing with an infinite bus
A bus maintaining constant Vb and fb when fed from alarge source of supply, irrespective of a variation in theloads connected on it, is called an infinite bus. An incominggenerator would cause no change in these parameters,unlike, when the two machines were required to run inparallel. The performance of an incoming machine wouldtherefore now be different than previously.
Earlier a change in its input power or excitation wouldvary the output, frequency or the voltage of the othermachine. There is no such influence on an infinite bus.
C Performance on no-load1 By changing the driving torque or power input
The situation as noted earlier would occur. If thegenerator G1 accelerates faster and its voltage E1 getsahead of Vb vectorially, the magnitude remaining thesame, Figure 16.16(a) would generally apply, withoutthe phasor E2 (Figure 16.22):
E V E1 b c – =
IEZc
c
1 = (for an infinite bus, Z2 may be
considered to be zero) and
V E I Zb 1 c 1 = – ◊If E1 is slower and falls behind Vb vectorially, then G1will operate as a synchronous motor and receive reactivepower I Zc
21 , from the infinite bus (Figure 16.23) since
V E I Zb 1 c 1 = + .
2 By changing the excitation (field current) Thesame situation would occur as noted above, if theexcitation of G1 is increased from E1 to ¢E1. Then
¢E V E1 b c – =
IEZ
Zcc
12 = ( = 0)
Figure 16.23 Effect of changing the driving torque ofG1 on no-load
G1 slower and E1 falling behind Vb(Operating as a synchronous motor)
EC
�90∞
IC
E1
IC ·R1
90∞
E C = IC
· Z1
I C ·
X d1
V E I Zb 1 C 1 = + ◊
Figure 16.22 Effect of changing the driving torque of G1on no-load
EC
�90∞
IC
Vb
E1
IC · R1
90∞
E C = I C
· Z1
I C ·
X d1
G1 faster and E1 ahead of Vb
V E I Zb 1 C 1 = – ◊

Captive (emergency) power generation 16/599
Ic would lag Ec by almost 90∞ and lead Vb by almost90∞ (Figure 16.24(a)). The net effect would be ademagnetizing armature reaction for G1, tending toweaken its field, diminish ¢E1 and synchronize it withthe infinite bus once again.
If E1 is reduced to ¢E1 then,
V E Eb 1 c – = ¢
The direction of current would reverse, and Ic wouldlead ¢E1 . G1 now, instead of supplying the reactivepower to the bus, would receive reactive power andoperate as a synchronous motor. Theoretically, thearmature reaction, being magnetizing, would tend tostrengthen its field, enhance ¢E1 and help to synchronizeG1 once again with the infinite bus (Figure 16.24(b)).But such a situation may not occur unless the generatoris designed for a leading p.f., as noted earlier.
When, however, E1 is equal to Vb and in phase, Ecwill be zero and there will be no current from G1 to thebus or vice versa. The machine will only float on thebus and the PM1 will be supplying only the mechanicallosses (Figure 16.24(c)).
D Performance on-load(Considering G1 as the incoming machine and referringto Figure 16.15)
1 By changing the driving torque or power input
Fixed parameters Vb, fb, Zb = O, and Z1Variable parameters I1 and cos f1, while E1 will
have a fixed magnitude butvariable phasor disposition
When the power input to PM1 is increased, the output
of G1 increases. Since E1 is constant at a particularexcitation, it changes its phasor location only withrespect to Vb. With a change in power input, therefore,E1 traverses through a fixed trajectory as shown inFigures 16.25a and b, and with it changes its loadangle, q1, load current, I1 and p.f. cos f1. We haveconsidered four possible conditions, to define theperformance of the machine, under different levelsof power input:
• When E1 is ahead of Vb At a load angle q1 theload current, I1 will lag Vb by an angle f1 (Figure16.25(a)). I1 is still considered to be lagging ¢Ecby almost 90∞, although it may be better on load.
• With the increase in the power input, E1 will advancefurther and improve its p.f. At one stage, the p.f.will become unity and beyond this it will startleading (Figure 16.25(b)). Incidentally, themaximum p.f. is achieved when the load angle q1,becomes 90∞, which is also the limiting stage,beyond which it would become an unstable region,as the exciter would cease to exercise any controlover the voltage. At this point, refer to parameters
¢ ¢ ¢ ¢ ¢E E I1 c 1 1 1, , , and f q as 90∞.Any condition beyond unity p.f., i.e. f1> 0, would
mean I1 leading and can compensate the reactivepower of the system and improve its p.f. Themachine is now called a synchronous condenser(capacitor), which besides supplying power to themain bus, will also improve the system p.f. Theabove, however, is only a theoretical analysis. Agenerator designed for 0.8 p.f. lagging is not suitableto operate at a leading p.f., as the excitation systemwould cease to exercise any control over the voltage.The voltage rises rapidly beyond unity p.f. as aresult of positive armature reaction (Section 16.4).When a generator is required to operate at leadingp.fs., its field system must be designed for leadingp.fs.
• When, however, the power input to PM1 is reduced,G1 will gradually off-load. Consider the situationwhen E1, falls in phase with Vb. (Refer to parametersE1
0c0
10, , = 0E q and I1
010 at f in Figure 16.25(b).)
G1 will now feed no power to the bus, nor receiveany power from it. G1 is now termed as floating onthe bus and the PM1 supplies primarily only its no-load losses.
• For the sake of argument, if the power input isreduced further, say by removing PM1 totally fromthe generator, ¢¢E1 will fall behind Vb and ¢¢I1 willlead Vb. (Refer to parameters ¢¢ ¢¢ ¢¢E E1 c 1, , q and
¢¢ ¢¢I1 1 at f in Figure 16.25(a).) The machine will nowoperate as a synchronous motor rather than as agenerator and will absorb reactive power from thebus. Since the generator operates once again atleading p.fs., the same condition will apply as notedabove.
2 By changing the excitation (field current)
Fixed parameters Vb, fb, Zb = 0 and Z1,Variable parameters E1, I1 and cos f1
Vb EC
�90∞
IC
EC = IC · Z1
E1 ¢E1
(a) When ¢E1 > Vb, G1 operates as generator
�90∞
EC = IC.Z1
V b EC
IC
E1
(b) When ¢E1 < Vb, G1 operates as synchronous motor
Vb E1
(c) When ¢E1 = Vb, EC = 0 and I C = 0, G 1 floats on the bus
Figure 16.24 Effect of varying the excitation on no-load
¢E1 ¢E1

16/600 Electrical Power Engineering Reference & Applications Handbook
The same theory would apply as discussed abovein the case of two generators. Since there is no variationin the power input to PM1 the output of generator G1will remain the same, except for the marginal variationin the copper losses as noted earlier:
\ I I I1 1 1 1 1 1 cos = cos = cos = constantf f f¢ ¢ ¢¢ ¢¢
In other words, for the same bus voltage, Vb, the
active component of the current for G1 would remainthe same while the reactive component I I1 1 1 sin , f ¢sin ¢ ¢¢ ¢¢f f1 1 1 or sin I and therefore the reactive power(kVAr) would continue to vary. A change in excitationwill change E1, and its load angle q1 (Figure 16.26(a))and consequently will change I1 and its p.f., cos f 1.The following possibilities may arise:
• When G1 operates at unity p.f. is the most idealcondition. The generator will now deliver itsmaximum power at the least current value. Themachine is least stressed for its best performance.G1 is ahead of the bus and is only sufficiently excitedsuch that cos f1 = 1 and
E V I X E Vd1 b 1 1 1 1 b = + or cos = q
¢E C ¢¢I1
¢¢E CI1
f1
q1¢¢f1
¢¢q1
Vb
90∞I1 ·R
1
�90∞
E1
I 1 ·
X d1
¢¢E1
Traj
ecto
ry fo
r E 1
(a)
IZ
E
1
1
C
=
◊
¢
¢¢ ◊IR
1
1
¢¢ ◊
¢¢
IZ
E
1
1
C
=
¢¢ ◊I
X1
d1
¢¢E1 ¢E1
¢¢I1
¢I1
0
E1
¢q1
¢¢q1q1 A
I1 Vb
f1 = 0
p.f. leading region p.f. lagging region
Figure 16.26(a) Phasor diagram
f1¢
f1¢¢¢E1
Vb
¢q 1�
90∞
�90
∞
Trajectory for E1
(b)
Figure 16.25 Performance of generator G1 by varying itsdriving torque on load
¢ ◊I
X1
d1 ¢ ◊
¢
IZ
E
11
C
=
f1 = 90∞ ∞
¢ ◊IR
1
1
E1 1( = 90 , ∞ ∞ ∞ ∞f q1 = 0)
¢Ec
I X E1 d1 c = ∞ ◊ ∞
¢I1
I 1∞
¢f1
G1
Cur
rent
I1
I1A
0
p.f. leading region(under-excitation)
p.f. lagging region(over-excitation)
Excitation (field current)
cos f1=1
Figure 16.26(b) Field current vs armature current. Variation inthe load current of G1 with the change in the excitation on load
¢¢ ¢¢I1 1 – at cos f ¢ ¢I1 1 – at cos f

Captive (emergency) power generation 16/601
• When G1 is overexcited, E1 rises to ¢E1 and themachine starts to operate at lagging p.fs., so that
¢ ¢E V1 1 b cos > q and cos > cos .1 1¢q q• When G1 is under-excited, E1 will reduce to ¢¢E1
and the machine will start to operate at leadingp.fs., so that ¢¢ ¢¢E V1 1 b cos < q and cos ¢¢q1 < cos q1.All these conditions are illustrated in Figure 16.26(a).In all three cases, the active component of current,OA, remains the same. A higher current than theactive component, either lagging or leading, is aloss component. It is desirable to operate G1, asclose to unity p.f. as possible to keep this componentat its lowest. The variation in the generator current,I1 versus field current, is shown in Figure 16.26(b).When the current I1 is leading, the machine absorbsreactive power and operates as a synchronouscondenser and in addition to supplying its activepower to the system also improves the system p.f.But, as noted above, for operating a generator as asynchronous condenser, its field system has to bedesigned accordingly.
16.10 Procedure of paralleloperation
16.10.1 Synchronization
Before switching an incoming generator on an existingsource, which can be another generator or an infinitebus, it is essential to first fulfil the following basicconditions, to avoid a possible voltage or current transientcondition which may occur and cause electrodynamicforces in the generator and damage its armature or affectadversely other machines, connected on the system orthe bus system itself.
1 The phase sequence or phase rotation of the incomingmachine must be the same as that of the existingsource (Figures 16.27(a) and (b)).
2 The terminal voltage, E1, of the incoming machinemust be almost the same as that of the other machine,E2 or the bus, Vb (Figure 16.27(c)), i.e.
E1 = E2 or Vb
and DV = E1 - E2
or DV = E1 - Vb
where DV = difference in magnitudes of the twovoltages. Permissible variation: DV = within 1% ofVb or E2 .
3 The frequency of the incoming machine f1, must bealmost the same as that of the other machine, f2, orthe bus, fb. Permissible variation: Df = within 0.15 Hz.
4 To check the phasor difference, if any, between E1and E2 or Vb to check Dq (Figure 16.27(d)). Dq givesrise to residual voltage Ec, which is responsible forthe circulating current Ic. (Section 16.9, Equation (v).)Permissible variation: Dq = within 7∞.
HuntingAny error beyond permissible limits in DV, Df, or Dq
may cause a shock and disturbance to the incomingmachine and the existing system. Dq and Df may causehunting which makes the rotor swing even beyond itssynchronous speed as a result of its own inertia. But thisdevelops an opposing torque too which retards theseover-swings. Thus, while hunting would attenuate on itsown, the machine would supply and absorb large amountsof power alternately during the course of hunting. As themechanical forces are proportional to the square of thecurrent drawn by the machine at a particular instant (F µI 2, equation (28.4)), they may be associated with largecurrent transients. The duration of such a situation wouldplay a very significant role in the stability of the system
BVb
Vb
VbY
R
w b
B1
E1
E1
E1
Y1
R1
w1
(a)
Phasor diagram ofthe existing source
(b)
Phasor diagram of theincoming generator
E1
Vb
Vb
Vb
E1
E1w b
E V1 b= and DV = 0, Dq = 0
(c)
Both voltages inphase and equal
E1 = E1max. sin w1t. andVb = Vbmax. sin wbt.w1 and wb are the angular speeds (2p f )in rad./sec. of the two voltages
(d)
Figure 16.27 Phase sequence and phase displacement
Time (w t)
Phase displacement Dqcausing residual voltage EC
t
Vol
tage
EC
Vb
E1

16/602 Electrical Power Engineering Reference & Applications Handbook
and the safety of the incoming machine. This situationmust be dealt with as quickly as possible. Hence theimportance of keeping these variables as low as possible,and reaching a stable state in only two or three cyclesafter synchronization. Thus such reversals of mechanicalforces of the rotating masses are more important, ratherthan the magnitudes of the torques that the machine willhave to sustain. In large power stations, where such forcesmay assume very high proportions, because of large sizedmachines, they may even upset the normal supply systemby severe power fluctuations, outage of the system oroverstressing of the incoming machine through its statorand the rotor. In rare instances it is seen that the pulsatingtorque caused by Ec has even sheared off the couplingsor the driving or the driven shafts. For the significance ofDf or Dq refer to Figures 16.31(a) and (b). To achieve therequired conditions of synchronization the followingprocedure may be adopted.
To check the phase sequenceThis can be checked with the help of a phase sequenceindicator. This is a simple instrument that houses a small3f motor, which rotates a pointer connected to the motorthrough a gearbox. The direction of rotation of the pointerwill determine the phase sequence of the system.
To check the terminal voltage and frequencyFigure 16.28 suggests a simple method to measure theterminal voltage E1 and the frequency f1, of the incomingmachine:
1 The voltage can be lowered or raised by varying thefield excitation through the AVR of the machine. Anydifference in the voltage of the incoming machine
with the voltage of the existing system will result inDV and Dq .
2 The frequency can be lowered or raised by changingthe speed of the engine by varying its power input,i.e. by controlling its fuel supply (diesel in a DG set,water in hydro and steam in thermal generation).Any variation in frequency will also cause a residualvoltage, Ec, and Figure 16.27(d) would apply,
where Ec = E1max. sin w1t – E2max. sin w2t etc.
where E1 = E2 or Eb
Ec = E1max (sin w1t – sin w2t)
and the frequency across the incoming generator breakerwill be (f1 + f2)/2 when it is operating in parallel withanother generator. In an infinite bus, the bus frequency,fb will prevail (Section 16.9.1 C and D).
To check the phase differenceSome methods to do this are noted below:
1 Voltmeter method2 Dark lamp method Manual3 Synchroscope method synchronization4 Check synchronizing relay5 Auto-synchronization Automatic
1 Voltmeter method (Figure 16.29)The incoming machine is brought up to its synchronousspeed by controlling the torque or power input to theengine and the voltage to the required level with the helpof the AVR (Figure 16.6). When the line voltage of theincoming machine and the other source are the same andfall almost in phase with each other, i.e. when thecumulative effect of DV, Dq and Df fall within permissible
Existingsystem
IncomingM/C–G1
R Y R1 Y1
V� V�
V�/110 VControl VT
V� /110 VControl VT
GG
Existingsystem
Incominggenerator
Common
Vb fb E1 f1 SYN
Vb /fb : Existing voltage and frequency-metersE1/f1 : Incoming voltage and frequency-metersSYN : Synchroscope
Figure 16.28 Circuit to check V and f
¸˝˛
Figure 16.29 Synchronizing by the voltmeter method
R
Y
B
Existing source(Vb, fb)
VS1 Q VR VY VB
Synchronizingvoltmeters tomeasure DVand EC (Dqand Df )
R1
Y1 B1
G1
Incoming generator (E1, f1)
S1 – Double throw switchQ – Generator breakerV – To compare voltages of the two sources

Captive (emergency) power generation 16/603
limits, the three synchronizing voltmeter readings willread almost zero. This is the condition when thesynchronizing switch or the incoming machine breakercan be closed.
2 Dark lamp method (Figure 16.30)This is a simpler method to check the phase displacementbetween the incoming and the existing voltage. Normallytwo lamps are connected in series to make them suitablefor 480 V as shown to withstand the maximum line voltage,in case the two voltages fall 180∞ apart. This voltage, DVcan rise to
( + )
3 or
2
31 b bE V V
i.e. 2 4153
or 480 V for a 415 V system¥Ê
ËÁˆ
¯
This is a better method, for it can compare both frequencyand phase displacement of the two voltages, as Df wouldalso result in Ec and is reflected by the flickering of thelamps. If the frequencies f1 and fb are not equal, thelamps will flicker at the rate Df, i.e. (f1 - fb) times persecond. For example, for a difference of 2 Hz the lampswill flicker twice every second.
In both the above cases the following will occur whenthe generator breaker is closed and the frequency of theincoming machine f1 is not equal to the frequency of theexisting source fb. For ease of explanation, we considerthe dark lamp method. In the voltmeter method it is thevoltmeter needle that will flicker rather than the lights.
• Ec will appear across each phase (Figure 16.31(a))and the lamps will flicker at (f1 - fb) times per second.When the phasors E1 and Vb are closer, the brightnesswill be the least (Figure 16.32) and when they arewidest apart, it will be the maximum (Figures 16.31(b)and 16.33). To attain Ec = 0, i.e. Dq = 0, it is essentialthat E1 and Vb are in phase.
• There will thus be a momentary bright and mostlydark period every second. During the dark period thetwo voltages are either in phase or are very close toeach other, such that the residual voltage Ec isinadequate to make the lamps glow. When the lampsare dark, somewhere during the middle of the darkperiod, is the ideal instant when the incomingmachine can be synchronized with the existing sourceby closing its breaker. This is the condition illustrated
R
Y
B
Existing source(Vb, fb)
Synchronizinglamps to indicateDV andEC (Dq and Df )
QS1V
R1Y1 B1G1
Incoming generator (E1, f1)
S1 – Double throw switchQ – Generator breakerV – To compare voltages of the two sources
Figure 16.30 Synchronizing by the dark lamp method
Figure 16.31(a) Residualvoltage Ec across each phasewhen f1 is not equal to f b
Figure 16.31(b) Magnified representation of a frequency error D f
Vb
E1E1
EC
Vb
E1
Vb
w b w1
EC = E V1 b – w1 = 2p f1 rad./sec.wb = 2p fb rad./sec.
E1( f 1) Vb(fb)
f 1 > f b (assumed)
E1 EC = E V1 b +
VbSlip frequency (Df )
When the voltages are fallingphase apart (180∞ out of phase),EC = max. at frequency Df
Vb = Existing source atfrequency, f b
E1 = Incoming source atfrequency, f 1
EC = Residual voltage atfrequency Df

16/604 Electrical Power Engineering Reference & Applications Handbook
in Figure 16.32. The rest of the performance of theincoming generator is explained in Section 16.9.1,while dealing with the behaviour of a generator duringa parallel operation.There is, however, a disadvantage in the dark lamp
method as when Ec is, say, less than 60% of E2 or Vb (anincandescent lamp does not glow at less than 30% of itsrated voltage and there are two such lamps in series) thelamp will stay dark. A slight mis-judgement may closethe generator breaker when Ec may be large enough (upto 0.6 times or so of Vb) across the generator windings tocause a dangerous situation, as discussed earlier.
Before closing the breaker it is also essential to know,whether the incoming machine was running a little toofast or too slow. As discussed in method 5, the incomingmachine must run a little too fast compared to the machinealready running or the infinite bus while beingsynchronized. When so it will share a part of the existingload, no sooner it is synchronized and fulfil the purposefor which it is being synchronized with the existing source.To ascertain this before synchronizing, increase the speedof the incoming machine. An increase in the flickeringof the lamps will indicate a faster machine, while adecrease will indicate a slower machine. Paralleling of aslower machine is not desirable, as it may draw powerfrom the existing source and operate as a synchronousmotor rather than a generator and defeat the purpose ofparalleling.
3 Synchroscope methodThis is the simplest method of all. A synchroscope is aninstrument that compares the speed (i.e. the frequency) ofthe incoming machine, f1, with the frequency of the existingsource, f b (i.e. D f ) and is in the form of a rotating pointerwhich rotates at a speed proportional to the difference inthe two frequencies. If the incoming machine is runninga little too fast, it will have a clockwise rotation and if itis a little too slow, it will show a counter-clockwise rotation.The incoming machine will be synchronized only when itis a little too fast and the pointer rotates clockwise at avery slow speed, i.e. when the frequency of the incomingmachine is too close to the other source and a little toohigh. The machine may be quickly synchronized at theinstant when the pointer moves through its zero axis, asillustrated in Figure 16.34. For an accurate closing, anindicating light is normally provided in the instrumentthat glows at every zero, the instant at which the machinemust be synchronized. Figure 16.34, suggests a simpleconnection diagram of a synchroscope.
4 Check synchronizing relay (Relay code 25)The purpose of this relay is to check the accuracy ofmanual synchronizing. It basically checks Df, DV and Dqbetween G1 and the existing source, as is done by asynchronizing monitoring relay. When the quantities fallwithin the permissible limits, the relay unlocks the G1breaker and only then may the machine be synchronizedmanually. It is a preferred practice to use such a relay asa safety precaution for manual synchronizing, to double-check the pre-set quantities of D f, DV and Dq, to preventinadvertent synchronization, particularly because of thelead time required to close the breaker after a closingimpulse (Table 19.1), which a manual mode may not beable to assess so accurately and the machine may besynchronized just before or just after the moment ofsynchronization.
VbE1
E1
Vb
E1
Vb
w b w1
EC = E V1 b – = 0
Figure 16.32 Residual voltage is zero when E1 is in phasewith Vb
Figure 16.33 Residual voltage is maximum when E1 is phaseapart with Vb
VbE1
E1
Vb
E1
Vb
w b w 1
When E1 = Vb
EC = E V V1 b b + = 2
EC
R
Y
B
Existing source(Vb, f b)
R1
Y1B1
G1
Incoming generator (E1, f1)
S1 – Double throw switchG1 – Incoming machine (E1,f1)Q – Generator breakerV – To compare voltages of the two sources
Synchroscope
Zero axis
QV
Slow Fast
Pointer
Synchroscope
Figure 16.34 Connection of a synchroscope
S1
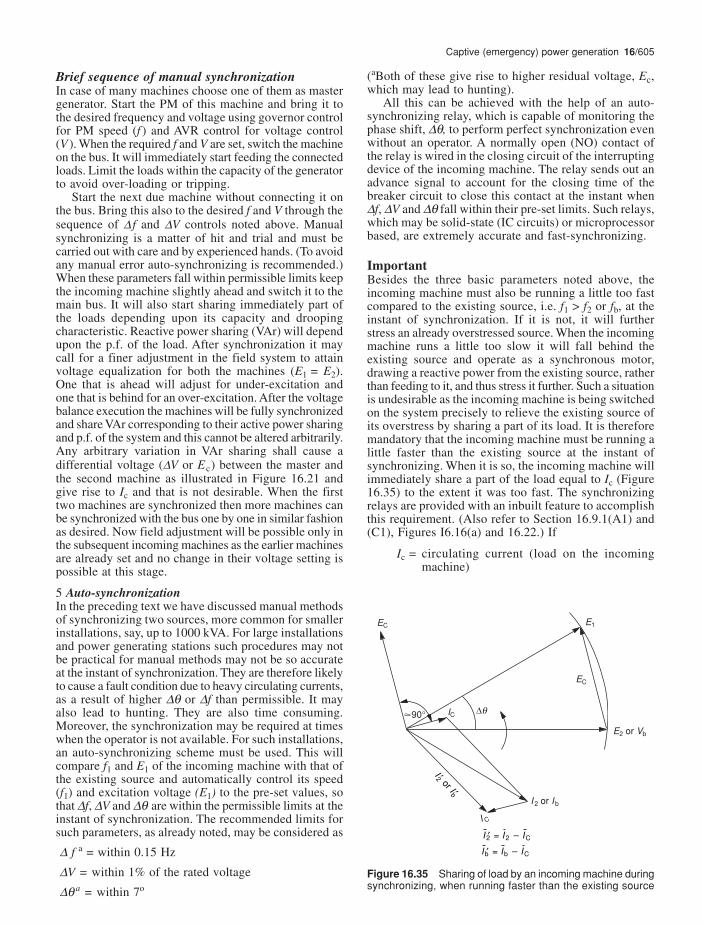
Captive (emergency) power generation 16/605
Brief sequence of manual synchronizationIn case of many machines choose one of them as mastergenerator. Start the PM of this machine and bring it tothe desired frequency and voltage using governor controlfor PM speed (f ) and AVR control for voltage control(V ). When the required f and V are set, switch the machineon the bus. It will immediately start feeding the connectedloads. Limit the loads within the capacity of the generatorto avoid over-loading or tripping.
Start the next due machine without connecting it onthe bus. Bring this also to the desired f and V through thesequence of D f and DV controls noted above. Manualsynchronizing is a matter of hit and trial and must becarried out with care and by experienced hands. (To avoidany manual error auto-synchronizing is recommended.)When these parameters fall within permissible limits keepthe incoming machine slightly ahead and switch it to themain bus. It will also start sharing immediately part ofthe loads depending upon its capacity and droopingcharacteristic. Reactive power sharing (VAr) will dependupon the p.f. of the load. After synchronization it maycall for a finer adjustment in the field system to attainvoltage equalization for both the machines (E1 = E2).One that is ahead will adjust for under-excitation andone that is behind for an over-excitation. After the voltagebalance execution the machines will be fully synchronizedand share VAr corresponding to their active power sharingand p.f. of the system and this cannot be altered arbitrarily.Any arbitrary variation in VAr sharing shall cause adifferential voltage (DV or Ec) between the master andthe second machine as illustrated in Figure 16.21 andgive rise to Ic and that is not desirable. When the firsttwo machines are synchronized then more machines canbe synchronized with the bus one by one in similar fashionas desired. Now field adjustment will be possible only inthe subsequent incoming machines as the earlier machinesare already set and no change in their voltage setting ispossible at this stage.
5 Auto-synchronizationIn the preceding text we have discussed manual methodsof synchronizing two sources, more common for smallerinstallations, say, up to 1000 kVA. For large installationsand power generating stations such procedures may notbe practical for manual methods may not be so accurateat the instant of synchronization. They are therefore likelyto cause a fault condition due to heavy circulating currents,as a result of higher Dq or Df than permissible. It mayalso lead to hunting. They are also time consuming.Moreover, the synchronization may be required at timeswhen the operator is not available. For such installations,an auto-synchronizing scheme must be used. This willcompare f1 and E1 of the incoming machine with that ofthe existing source and automatically control its speed(f1) and excitation voltage (E1) to the pre-set values, sothat Df, DV and Dq are within the permissible limits at theinstant of synchronization. The recommended limits forsuch parameters, as already noted, may be considered as
D f a = within 0.15 Hz
DV = within 1% of the rated voltage
Dq a = within 7o
(aBoth of these give rise to higher residual voltage, Ec,which may lead to hunting).
All this can be achieved with the help of an auto-synchronizing relay, which is capable of monitoring thephase shift, Dq, to perform perfect synchronization evenwithout an operator. A normally open (NO) contact ofthe relay is wired in the closing circuit of the interruptingdevice of the incoming machine. The relay sends out anadvance signal to account for the closing time of thebreaker circuit to close this contact at the instant whenDf, DV and Dq fall within their pre-set limits. Such relays,which may be solid-state (IC circuits) or microprocessorbased, are extremely accurate and fast-synchronizing.
ImportantBesides the three basic parameters noted above, theincoming machine must also be running a little too fastcompared to the existing source, i.e. f1 > f2 or fb, at theinstant of synchronization. If it is not, it will furtherstress an already overstressed source. When the incomingmachine runs a little too slow it will fall behind theexisting source and operate as a synchronous motor,drawing a reactive power from the existing source, ratherthan feeding to it, and thus stress it further. Such a situationis undesirable as the incoming machine is being switchedon the system precisely to relieve the existing source ofits overstress by sharing a part of its load. It is thereforemandatory that the incoming machine must be running alittle faster than the existing source at the instant ofsynchronizing. When it is so, the incoming machine willimmediately share a part of the load equal to Ic (Figure16.35) to the extent it was too fast. The synchronizingrelays are provided with an inbuilt feature to accomplishthis requirement. (Also refer to Section 16.9.1(A1) and(C1), Figures I6.16(a) and 16.22.) If
Ic = circulating current (load on the incomingmachine)
EC E1
EC
E2 or Vb
DqIC
I C
I 2 or Ib
�90∞
¢¢
I
I
2
b
or
¢I I I2 2 C = –
¢I I Ib b C = –
Figure 16.35 Sharing of load by an incoming machine duringsynchronizing, when running faster than the existing source

16/606 Electrical Power Engineering Reference & Applications Handbook
I2 or Ib = loading on the existing sourceThen the new loading on the existing source,
¢I I I2 2 c = – in case of another machine G2
or ¢I I Ib b c = – in case of an infinite bus
The incoming machine can then be loaded as desired.
Summary of auto-synchronization
The total sequence of auto-synchronizing a standbygenerating unit with an existing system can thus besummarized as follows:
• On receiving a closing signal, the AMF panel startsthe prime mover of incoming machine DG1. Throughautomatic speed and voltage controls, as discussed inSection 16.7, G1 is brought up to its speed and voltageas desired.
• At this stage, an auto-synchronizing relay (Relay code25) is brought into the circuit. This relay is suitablefor any size of a generating unit to be synchronizedautomatically with another unit or an infinite bus.The relay executes three basic functions:
1 As a frequency (DDDDD f ) comparator and frequencybalancing or equalizing unit (FNI) This unitcompares the difference in the two frequencies (D f )and controls it through an inbuilt frequency balancingrelay. The relay sends out a pulse to the motorizedgovernor of incoming machine PM1 (Figure 16.36),to raise or lower its speed to attain the pre-set D f,within 0.15 Hz, depending upon the size of themachine and the flywheel used with the PM1. Therelay unit FNI can be built into the auto-synchronizing relay or can be a separate unit.
2 As a voltage ( DDDDDV ) comparator and voltagebalancing or equalizing unit (UNI) This unitcompares the difference in the two voltages (DV)and controls it through an inbuilt voltage balancingrelay. The relay sends out a pulse to the AVR of G1through a motorized potentiometer, which can beintroduced in the QDC circuit (Figure 16.6) to raiseor lower its excitation automatically to attain thepre-set DV, generally within 1% of the rated voltage.
The relay unit UNI can be built into the auto-synchronizing relay or can be a separate unit.
3 Auto-synchronizing relay (25) It monitors DV,D f and phase shift (Dq), between the two voltagephasors. In other words it monitors the residualvoltage, Ec. It also ensures that G1 is slightly aheadof the existing source at the instant of synchronization.
When these parameters are brought within the pre-setvalues, the relay transmits a closing impulse to theswitching circuit of G1, a little in advance to account forthe closing time of the breaker circuit. The breaker isthus switched at almost the same instant, when all theparameters fall within the pre-set limits. The total closingtime may be a few ms (say, 150-300 ms), dependingupon the closing time of the breaker and any other coilsor relays incorporated into the switching circuit whichmay add to the closing time. (Also refer to Table 19.1,for the closing time of breakers.)
Active and reactive load sharing
In case of auto-synchronizing it is carried out throughthe load balancing relays (Figure 16.36) by closelymonitoring and adjusting Df, DV and Dq. The relays sendout corrective impulses to the governor motor for D f thatbalances the active power, and to the AVR for field controlfor DV that balances the reactive power. These relaysalso determine if more machines were needed on the busto cater for higher load demand or some of the machinesto be shut down in case of fall of load demand. The samefunctions can also be carried out manually by hit andtrial, as for manual synchronizing when the auto-synchronizing relay is not functional.
Important1. It may be noted that irrespective of load demand and
capacity of machines, the ratio between active (P)and reactive power (Q) sharing between differentmachines operating in parallel is pre-defined by theratings of the machines, drooping characteristics ofthe PMs and p.f. of the load and cannot be altered inany other proportion. It is also illustrated in Figures16.37 and 16.38. Altering these ratios shall result inresidual voltage Ec causing spurious circulating current(Ic) and over-heating of the machines.
2. For optimum utilization of machines it is better tochoose identical machines in rating and droopcharacteristics as far as possible. Where ratings haveto be unequal depending upon load demand, it isadvisable to choose the machines with similar droopingcharacteristics. When the PMs are of different typessuch as diesel engine, gas engine, gas or hydraulicturbines, ensure that all PMs are compatible (ingovernor speed and accuracy). Governors must beisochronous, i.e. accurate speed droop type. A goodgovernor may maintain speed typically within ± 0.25%to ±1% of Ns.
3. If the p.f. or reactive power of any of the machine ofthe many running in parallel is fluctuating, it maymean mal-functioning of the AVR and excitationsystem and will call for an investigation. The reactivepower fluctuation will mean voltage flickering. Themachine must be immediately taken out from thesystem. The remaining machines will share the systemload demand shedding out some loads. If this machineis not immediately shutdown, it may upset thesynchronism of other machines also, as they try toadjust the reactive loads and may fall out of tandemand trip besides over-loading endangering the fieldsystems of healthy machines also.
4. Paralleling through a transformer – When HV andLV generators are to be synchronized at LV througha transformer ensure that in addition to phase voltages,phase relation and hence the vector group oftransformer LV side is identical with that ofthe generator it is to be paralleled with. Theconnections of phase windings however, need not bechecked so long as they have the same phasor rotation(phase sequence) (Figure 1.2) as for the othermachines.
5. Whenever import and export of power is involved,

Captive (emergency) power generation 16/607
active and reactive load control is essential to complywith the tariff restrictions. To optimise on exportedpower, reactive power flow through the grid must beavoided as far as possible. The ideal situation will beto export power as near to unity p.f. as possible. Ifexported active power falls below the governor setpoint, it may be raised and if high may be lowered.To prevent reverse power flow through the grid to thegenerator, an RPR (relay code 32-G) may be introducedon the outgoing circuit of the generator bus (somewhatlike shown in Figure 16.14 and discussed in Section16.8).
6. For quality power and further optimization of machinesit is advisable,
– To improve the p.f. of the system to about 0.85–0.95. The PMs may not pose a limitation as duringparallel operation the utilization of machines’capacity is usually low because of varyingparameters of machines noted above.
– Harmonics be suppressed to desirable limits tocontain voltage flickers (see Section 23.7.1).
– Balance the loads to maintain a near balancedsystem.
M1–M 4 – Circuit breaker*G1–G 3 – Generator
PM1–PM3 – EngineGOV – Governor
S1–S4 – Selector Sw.AVR – Automatic voltage regulator
32 – Reverse power relayLBR–A – Load balance relay activeLBR–R – Load balance relay reactive
78 – Main decoupling relay27 – Bus voltage relay
2 – Time delay relayUNI – Voltage balance relayFNI – Frequency balance relay25 – Auto-synchronizing relay
SFG–3 – Bus frequency relay
Figure 16.36 Typical block diagram illustrating an auto-synchronizing and load-sharing scheme
78 LBR–A LBR–R LBR–A LBR–R InterlockingScheme
SFG–3 LBR–A LBR–R
S1
32
M4
25FN1UNI
32
M3M2
32
27
2
TR
M1
S2
S3S4PM 3 G3
GOV AVRAVRGOVAVRGOV
PM 2 G2PM1 G1
*Usually four pole to isolate neutral to prevent circulating ground fault currents when the machine is idle
Figure 16.36(a) Front view of a multifunction protection relaywith synchronization covering many of the relays shown in Figure16.36 (Courtesy: Siemens)

16/608 Electrical Power Engineering Reference & Applications Handbook
16.11 Recommended protection fora synchronizing scheme
In addition to the normal protections, as suggested inSection 16.8.2 the following is also recommended whensynchronising two or more generators:
1 A reverse power relay (RPR) (Relay code 32)Refer to Figure 16.14.
2 Field failure relay (Relay code 40).Refer to Figure 16.14.
3 Mains de-coupling relay (Relay code 78) Thisprotection is applicable when the captive generator ishooked up with the main bus. The relay trips theincoming breaker instantaneously on failure of themain supply. Otherwise on rapid restoration of themain supply, as a result of fast auto-reclosing, themachine may be subject to mechanical damage or afault condition. A small delay would throw the twosources out of synchronization and voltages up to180∞ apart, causing a residual voltage Ec, up to twicethe system voltage. In such a situation the relay mustoperate even faster than the reclosing time, as fast aswithin 1 cycle (20 ms for a 50 Hz system) and trip thebreaker in less than 10 cycles (200 ms) to account forthe tripping time of the interrupting circuit and theinterrupter.
Figure 16.36(a) shows a state-of-the-art microprocessorbased synchronizing relay combining many relay unitsnoted in Figure 16.36 in one unit.
Notes1 For schematic diagrams of relays, refer to the manufacturers’
catalogues.2 The numbers given in parentheses denote the relay numbers as
in the ANSI Standard (Table 13.18).
16.12 Load sharing by two or moregenerators [control of activeand reactive powers]
The variable parameters in a generator that may affectits performance are:
1 Speed of the prime moverFor active load sharing,
f µ N (1.6a)
and P µ N · T (1.2)
The load sharing of the two generators is thereforedependent on the speed-load (drooping) characteristicsof the prime movers. Example 16.2 elucidates this.
2 Excitation voltage For reactive load sharing,P E I = 3 cos ◊ ◊ fWe will notice during our subsequent discussions thatE and I cos f are complementary. Although I andcos f cannot be altered directly, they are both functionsof excitation voltage E. A variation in E will varyboth I and cos f. The reactive or kVAr loading is thus
dependent upon the voltage versus reactive load-current characteristics of the generators and can bevaried through the QDC. Thus the power generatedor the load sharing by a generator can be altered inthe following ways;
• Active power (kW) sharing By changing themechanical torque of the prime mover by changingits driving force (fuel supply).
• Reactive power (kVAr) sharing By changing itsexcitation (field current) that will alter the generatede.m.f., E, in both magnitude and phase displacement,f remaining the same. A mismatch in excitation willresult in reactive unbalancing, causing a reactivecirculating current, which is not desirable. It iscontrolled through QDC by adjusting the droop evenfor identical machines.– As discussed already the reactive power sharing
through a generator is pre-defined by droopingcharacteristic of the PM of the generator and cannotbe altered arbitrarily.
When several generators are operating in parallel theAVR of the incoming generator adjusts its terminal voltagein such a fashion that E1 (Figure 16.21) falls close to Vbto keep Ec near zero and the machine shares its reactivepower according to the system p.f. through the QDC. Anyarbitrary variation in VAr more or less than permissiblewill throw Vb and E1 wide apart giving rise to residualvoltage Ec resulting in circulating current Ic that is notdesirable and may even throw the machines out of tandem.
16.12.1 Total automation through PLCs
With the availability of PLCs (Programmable LogicControllers, Section 13.3.6) it has become possible toperform all the above controls automatically. Thegenerating station can even be left unmanned. Suchschemes can be adopted for large captive generatingstations or where a quicker and more accurate powersupply is desirable, such as large process plants (cement,paper, chemicals and refineries) which may have largecaptive generating units (two and more). PLC is a fullypower automation and management device to monitorand control a whole generating station locally or remotelythrough serial data transmission via communicationinterfaces using different protocols (Section 24.11.5). It isalso possible to select the device for auto or manual modes.
When there are two or more machines it is also possibleto programme the PLCs to select the machine to performin a particular sequence so that each machine has almostthe same number of hours of operation. This makes iteasy to identify the next machine for routine maintenanceshutdown. A PLC is fully capable of performing thefollowing;
• To auto-start the machine in the same sequence asdiscussed in Section 16.7.
• To initiate operation of the next due machine whenthe power demand on the existing machine or busexceeds its rating. When the captive generation isprimarily to make-up for the lost power and auto-synchronization is used, the usual practice is to runall machines necessary to make up for the lost power

Captive (emergency) power generation 16/609
at the same instant and bring them on the bus one byone to save on the synchronizing time.
• To perform all the duties of an auto-synchronizingrelay and monitor and correct DV, Df and Dq.
• To run the incoming machine a little in advance, whileswitching it on the bus, to enable it share a part of theload immediately from the existing machine or the bus.The machine is also prevented from over-loading byprioritizing the essential loads. Loads are added on busin order of priority according to capacity available withthe generators already on the bus. Similarly on failureof a machine excessive loads are shed in the reversepriority.
• The duty of load sharing between two or more machinesis performed similarly including VAr-p.f. control.
• When the load demand falls, the machine that hasoperated for more hours is stopped first or if themachines are of different ratings shutdown the machinethat is more close to load shedding.
• Any required sequence or programming is possible.• The scheme can also be provided with the required
– Metering– Protection– Indication– Alarm– Annunciation etc.– Data monitoring and event recording– Maintenance schedule, even pre-warning preventive
maintenance– Trouble shooting
• Even the grounding of the generators can be monitoredthrough this scheme, so that only one machine isgrounded at a time, to avoid circulation andmultiplication of fault currents (Section 16.13.2).
• Using different types of prime-movers - Whendifferent PMs, diesel engine, gas engine, gas orhydraulic turbines are synchronized, it is possiblethat sometimes due to inadequate fuel supply thepressure of gas or liquid may drop, dropping thespeed of the PM and its governor playing redundant.During such a contingency load shedding alone maybe the answer to save the situation. The PLCs canestimate the gap between supply and demand andrelay out suitable commands to the healthy machinesfor load shedding in the reverse priority.
Example 16.2Consider two DG sets operating in parallel and having thefollowing parameters:
G1 G2Rating 750 kVA 750 kVAp.f. 0.8 lagging 0.8 laggingSpeed at full load 1500 r.p.m. (50 Hz) 1500 r.p.m. (50 Hz)Droop 3% 4%
To determine the load sharing between the two, draw thedrooping curves as shown in Figure 16.37.
For G1: FF1 = no-load speed = 1.03 ¥ 1500
= 1545 r.p.m.
and frequency = 1.03 ¥ 50
or 51.5 Hz.
FF0 = full-load speed
= 1500 r.p.m at a frequency of 50 Hz.
F0A2 = full active load
= 750 ¥ 0.8
= 600 kW
Similarly for G2:
FF2 = no-load speed = 1.04 ¥ 1500
= 1560 r.p.m.
and frequency = 1.04 ¥ 50
= 52 Hz
FF0 = full-load speed
= 1500 r.p.m.
at a frequency of 50 Hz
F0A1 = full active load
= 750 ¥ 0.8
= 600 kW
Therefore, the generators would share a load of 1200 kW equally.If, however, the total load is reduced to, say, 1000 kW, theloading will differ due to unequal drooping characteristics. Therevised load sharing can be determined as follows.
Let B1B2 represent the full load of 1000 kW at a frequencyFF3. If B1F3 and F3B2 are the load sharing by G2 and G1respectively, i.e. x + y = 1000 kW, then to determine therequired quantities, consider the two triangles
F2B1F3 and F2A1F0
when
F FF F
B FA F
2 3
2 0
1 3
1 0 =
= 52 – 50
= 600
a x
or 600a = 2x (1)
While considering triangles F1B2F3 and F1A2F0
Figure 16.37 Determining the load sharing between G1 andG2 with the help of prime-movers drooping characteristics
Freq
uenc
y (H
z)
or s
peed
f b
F2
F1
52 Hz
51.5 Hz
B 2
A 2
B1
A1
x
a
F3
F0
600 6001000 kW1200 kW
y
F
50 Hz
kWG1
kWG2
600 400 200 0 200 400 600

16/610 Electrical Power Engineering Reference & Applications Handbook
F FF F
F BF A
1 3
1 0
3 2
0 2 =
a y – 0.51.5
= 600
= 1000 – 600
x
or (a – 0.5) 600 = 1.5 (1000 – x ) (2)
From equations (1) and (2)
0.5 ¥ 600 = 2x – 1.5 (1000 – x )
or 3.5x = 300 + 1.5 ¥ 1000
\ x = 514 kW (for the generator having 4% droop) and
y = 486 kW (for the generator having 3% droop)
Reactive load sharingCos f = 0.8 f = 36.87∞
QP = tan 36.87∞ = 0.75
For generator G2: x = 514 kW (P)
\ Q = 514 ¥ 0.75
= 385.5 kVAr
and generator kVA loading
= P + JQ
= 514 + 385.52 2
= 642.5 kVA
For generator G1: y = 486 kW (P)\
Q = 486 ¥ 0.75
= 364.5 kVAr
and generator kVA loading
= 4 + 364.52 286
= 607.5 kVA
and a = 2 514600¥
= 1.7 Hz
\ FF3 = 52 – 1.7
= 50.3 Hz.
While sharing a load of 1000 kW they will be unequallyloaded as noted above and operate at a bus frequency of50.3 Hz.
NoteThis load sharing is for a p.f. of 0.8 and shall vary with the load p.f.
Example 16.3Consider two DG sets operating in parallel and having unequalratings as noted below:
G2 G1
Rating 1000 kVA 750 kVAp.f. 0.8 lagging 0.8 laggingSpeed at full load 1500 r.p.m. (50 Hz) 1470 r.p.m. (49 Hz)
Speed at no load 1560 r.p.m. (52 Hz) 1530 r.p.m. (51 Hz)\ Droop 4% 2%. It is governed by
the full-load speed ofthe larger machine(1500 r.p.m).
and active load 800 kW 600 kW
(A) To determine the load sharing between the two, draw thedrooping curves as shown in Figure 16.38.
FF1 = no-load speed of G1 at 51 HzFF2 = full-load speed of G1 at 49 Hz
F2B1 = 600 kWF1B1 = drooping characteristics for G1
Similarly FF3 = no-load speed of G2 at 52 HzFF4 = full-load speed of G2 at 50 Hz
F4A1 = 800 kWF3A1 = drooping characteristics for G2
Since the full-load speeds of the two engines are different,they will not be running at their respective full-load speedswhen running in parallel, but somewhere between thetwo. It will be seen that the maximum output will occurwhen G2 is operating at its full load. Consider trianglesF1F4A2 and F1F2B1. Then
F FF F
F AF B
1 4
1 2
4 2
2 1 =
or 12
= 600x
\ x = 300 kW
\ The maximum load the two machines can share whenrunning in parallel
= 800 + 300
= 1100 kW as against a capacity of 1400 kW
Reactive load sharingFor generator G2: P = 800 kW\ Q = 800 ¥ 0.75 (as for the previous example) = 600 kVArand generator kVA loading
Fre
quen
cy (
Hz)
or s
peed
f b
F352 Hz
a
y
B1
F1
F0
51 HzB2 (1000 – y)
A1 A2
B1
F4
F2
50 Hz
49 Hz
x
600kWF
800kW
LoadG2 – 800kW
LoadG1 – 600kW
800 600 400 200 0 200 400 600
Figure 16.38 Determining the load sharing
¢
f
P
QkVA

Captive (emergency) power generation 16/611
= 800 + 6002 2
= 1000 kVA
For generator G1:
P = 300 kW
\ Q = 300 ¥ 0.75
= 225 kVAr
and generator kVA loading
= 300 + 2252 2
= 375 kVA as against its capacity of 750 kVA and shall rungreatly under-utilized.
(B) When considering a load of only 1000 kW the sharing ofthe two machines will be as follows. Now the machineswould run a little faster than before. Say, the operatingline is shifted to ¢B B1 2, at a frequency of FF0. Considertriangles F B F3 1 0¢ and F3A1F4 when
F FB F
F FA F
3 0
1 0
3 4
1 4 =
¢
i.e. ay
= 2800
or 800a = 2y (1)
Similarly, consider triangles F1F0B2 and F1F2B1 when
F FF F
F BF B
1 0
1 2
0 2
2 1 =
or a y – 12
= 1000 –
600
or (a – 1) 600 = 2 ¥ 1000 – 2y (2)
From Equations (1) and (2)
1400a – 600 = 2 ¥ 1000
\ a = 26001400
= 1.86 Hz
and frequency of operation = 52 – 1.86
= 50.14 Hz
and Y = 800 1.862
¥
= 744 kW
and F0B2 = 256 kW
Conclusion
1 A slight variation in the drooping characteristics causes avariation in the load sharing.
2 Drooping characteristics of the PM play a vital role in loadsharing. The machine that has a higher droop (G2 in theabove case) will share a larger load than the one that hasa lower droop.
3 The higher the droop, the higher will be the load variation.4 When there is a difference in the full-load speeds the load
sharing during a parallel operation will not be equal andthe generators will operate under-utilized.
Hence the significance of employing identical machines, whenrequired to run in parallel to achieve the optimum utilizationof their capacities.
16.13 Fault levels when two or moregenerators are operating inparallel
16.13.1 System fault level
Consider Figure 16.39, illustrating four identicalgenerators operating in parallel. Each having the followingreactances:
p.u. (transient) reactance = ¢xd
negative phase sequence p.u. reactance = x2
zero phase sequence p.u. reactance = x0
For the sake of illustration, consider the following valuesof these reactances as in Example 13.4
¢xd = 16.2%x2 = 8.7%x0 = 4.1%
The 3-f transient fault current, Isc(r.m.s.), through a generator(when only one generator is operating at a time) in asymmetrical three-phase system as defined in Table 13.9,irrespective of the condition of neutral will be
IIxsc(r.m.s)
r
d= ¢ (16.1)
(from equation 13.5)
where Ir = rated current of the generator
for = 16.2%, = 0.162
or 6.17 d scr
r¢xI
II
and (phase-to-phase fault) = 3 + sc
r
d 2I ◊
¢I
x x (Table 13.9)
= 3
0.162 + 0.087r◊ I
= 6.95 Ir
If there is more than one generator operating in parallel,when the fault occurs, the reactances of all such machineswill fall in parallel and diminish the effective reactanceof the faulty circuit and enhance the fault current. Forinstance, when all four machines are operating in parallel,the effective reactance will become
¢ ¢¢ ¢ ¢ ¢ ¢
ÊË
ˆ¯x
xx x x x xde
d
de d d d d =
4 1 = 1 + 1 + 1 + 1
and the enhanced 3-f symmetrical fault current
¢ ¢ ¢II
xI
xscr
d
r
d =
/4 =
4
i.e. 4 ¥ 6.17Ir or 24.68Ir
Generalizing the above, the symmetrical 3-f fault current,when n number of machines are operating in parallel,
IIx
nscr
d = ¢ ◊ (16.2)
This is irrespective of whether the generator neutral isisolated or solidly grounded, and if grounded, whetheroperating singly or in parallel. System fault level multiplieswhen more than one machines are operating in parallel.
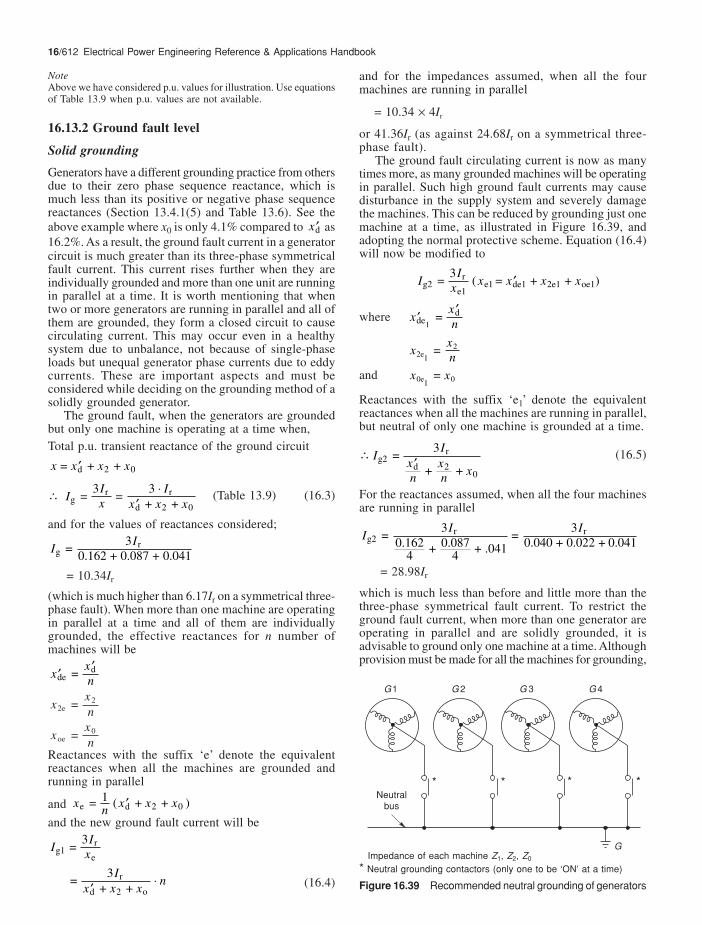
16/612 Electrical Power Engineering Reference & Applications Handbook
NoteAbove we have considered p.u. values for illustration. Use equationsof Table 13.9 when p.u. values are not available.
16.13.2 Ground fault level
Solid grounding
Generators have a different grounding practice from othersdue to their zero phase sequence reactance, which ismuch less than its positive or negative phase sequencereactances (Section 13.4.1(5) and Table 13.6). See theabove example where x0 is only 4.1% compared to ¢xd as16.2%. As a result, the ground fault current in a generatorcircuit is much greater than its three-phase symmetricalfault current. This current rises further when they areindividually grounded and more than one unit are runningin parallel at a time. It is worth mentioning that whentwo or more generators are running in parallel and all ofthem are grounded, they form a closed circuit to causecirculating current. This may occur even in a healthysystem due to unbalance, not because of single-phaseloads but unequal generator phase currents due to eddycurrents. These are important aspects and must beconsidered while deciding on the grounding method of asolidly grounded generator.
The ground fault, when the generators are groundedbut only one machine is operating at a time when,Total p.u. transient reactance of the ground circuit
x x x x = + + d 2 0¢
\ IIx
Ix x xg
r r
d 2 0 =
3 =
3 + +
ע
(Table 13.9) (16.3)
and for the values of reactances considered;
II
gr =
30.162 + 0.087 + 0.041
= 10.34Ir
(which is much higher than 6.17Ir on a symmetrical three-phase fault). When more than one machine are operatingin parallel at a time and all of them are individuallygrounded, the effective reactances for n number ofmachines will be
¢ ¢x
xnded =
xxn2e2 =
xxnoe0 =
Reactances with the suffix ‘e’ denote the equivalentreactances when all the machines are grounded andrunning in parallel
and xn
x x xe d 2 0 = 1 ( + + )¢and the new ground fault current will be
II
xg1r
e =
3
= 3
+ + r
d 2 o
Ix x x
n¢ ◊ (16.4)
and for the impedances assumed, when all the fourmachines are running in parallel
= 10.34 ¥ 4Ir
or 41.36Ir (as against 24.68Ir on a symmetrical three-phase fault).
The ground fault circulating current is now as manytimes more, as many grounded machines will be operatingin parallel. Such high ground fault currents may causedisturbance in the supply system and severely damagethe machines. This can be reduced by grounding just onemachine at a time, as illustrated in Figure 16.39, andadopting the normal protective scheme. Equation (16.4)will now be modified to
II
xx x x xg2
r
e1e1 de1 2e1 oe1 =
3 ( = + + )¢
where ¢ ¢x
xnded
1 =
xxn2e1
2 =
and x x0e1 0 =
Reactances with the suffix ‘e1’ denote the equivalentreactances when all the machines are running in parallel,but neutral of only one machine is grounded at a time.
\ II
xn
xn
xg2
r
d 20
= 3
+ + ¢
(16.5)
For the reactances assumed, when all the four machinesare running in parallel
II I
g2r r =
30.162
4 + 0.087
4 + .041
= 3
0.040 + 0.022 + 0.041
= 28.98Ir
which is much less than before and little more than thethree-phase symmetrical fault current. To restrict theground fault current, when more than one generator areoperating in parallel and are solidly grounded, it isadvisable to ground only one machine at a time. Althoughprovision must be made for all the machines for grounding,
G1 G 2 G 3 G 4
Neutralbus
* * * *
G Impedance of each machine Z1, Z2, Z0
* Neutral grounding contactors (only one to be ‘ON’ at a time)
Figure 16.39 Recommended neutral grounding of generators

Captive (emergency) power generation 16/613
so that when one or more machines are out of service,one of those in service may be grounded. To achievethis, all the neutrals may be connected to a commonneutral bus through individual neutral grounding contactoras shown in Figure 16.39, and the common neutralgrounded solidly.
It may be pertinent to mention that in the above analysisground impedance is considered as nil, while it shallnever be so. In fact in LV systems, ground impedance ofeach ground station may be usually of the order of 1W ormore. Even if we consider it as small as 1W when all theground stations are put to parallel, it shall substantiallyreduce the ground fault current and so the severity of thefault. Nevertheless grounding of only one machine at atime is advisable to contain the severity of ground fault.
Notes1. The contactor may be three phase and all its terminals shorted
to make use of all its current carrying links for raising its currentrating and saving on its size and cost. To account for unequalload sharing by these links due to the slightest variation in theirimpedances, some manufacturers of contactors recommend toconsider only about 2.5 times the contactor rating for theselinks in parallel rather than three times to be on the safe side.
2. The rating of the neutral and so the size of contactor can be 30–50% of generator rated current Ir. Unless single phase loads arepredominant, neutral rating as 30% of Ir may be adequate.
Accordingly the contactor can be rated for only 12% 302.5( ) to
20% 502.5( ) of Ir. Use of breaker in the neutral circuit is rare in view
of large ratings of contactors available in the market.3. Choosing a contactor in the ground circuit commensurate to the
ground fault current may not pose a limitation and in alllikelihood, use of a breaker will not be necessary. The groundfault protection scheme shall usually have a tripping time ofless than 400 ms and a contactor is capable to withstand a faultof this duration.
4. Avoiding contactor chattering: A ground fault will cause anasymmetry in the supply system as discussed in Section 13.4.1(8)and one of the phases may have a severe voltage dip. If thecontrol circuit involves this phase, it may cause contactor chatteringeven tripping, rendering the protective scheme erratic and damagethe contactor or even render the scheme inoperational. To avoidthis, it is advisable to employ an independent source of controlsupply such as a battery for the contactor control and protectivewiring and the contactor with a d.c. coil.
5. During parallel operation usually the neutral of the mastergenerator is closed and other neutrals are left open. If the mastergenerator is to be taken out, another generator can be consideredas master and its neutral closed such that it opens the earlierneutral. Floating neutral must be avoided even momentarilyand for this the incoming neutral must close before the earlierone opens. It may momentarily put the two neutrals in parallelbut that may be safe.
6. In case of LV generators, impedance grounding to contain theground fault current as for MV generators (Section 21.4), is notadvisable, due to the same neutral feeding the single phase loads.Introduction of an impedance in the ground circuit will raise theGFF (Section 20.6), consequently the phase to neutral voltage ona ground fault. According to IEEE 142 and other electrical codes4 wire systems feeding single phase loads (not when feeding onlythree-phase loads) must be effectively or solidly grounded tomaintain GFF as close to unity as possible during a ground faultand prevent the phase voltage rise appreciably to endanger single-phase loads connected on the system.
Impedance grounding of MV generators
The above problem in case of MV machines can be
overcome by impedance grounding rather than solidgrounding. It can be a resistance R or inductance L orboth, as discussed in Section 20.4.2. For simplicityconsidering the same parameters as above then a p.u.resistance r of just 9% in every neutral, the improvedground fault current will become as follows when all thefour generators are grounded and are operating in paralleland one of them develops a ground fault:
II
x x xr
gr
d 2 0 =
3
4 +
4 +
4 + 3
¢(Table 13.9) (16.6)
= 4 3
+ + + 4 3r
d 2 0 r
¥¢ ¥
I
x x x I
= 4 3
(0.162 + 0.087 + 0.041) + 4 3 0.09r¥
¥ ¥I
J
= 4 3
1.08 + 0.29r¥ I
J
= 4 3
1.08 + 0.29
r2 2
¥ I
= 4 31.118
¥ Ir
or 10.73Ir
This is much less than the corresponding symmetricalfault current of 24.68Ir. By this method, the ground faultcurrent can be controlled to any desired level, even neutralsof all generators connected together without the need toprovide a cumbersome and elaborate groundingarrangement as for an LV system, except for takingcognisance of higher GFF because of impedancegrounding. We have considered a resistance with a viewto improving the p.f. of the fault current and thus, makingit easier to interrupt.
Level of ground fault current for large generators
Manufacturers of large generators, 200 MW and above,recommend the ground fault current, Ig to be limited inthe range of 5–15 A and a fault clearing time of the orderof 5–30 seconds to protect the machine and avoid over-heating of the grounded steel frame. One may also referto National Electrical Code (NEC), USA for more details.It is also recommended to limit the TRV (transient recoveryvoltage, Section 17.6.2) by inserting a small resistanceinto the grounding circuit to make the ground fault current(Ig) somewhat resistive than capacitive due to capacitivecoupling between the generator and the associatedequipment and the ground as illustrated in Figure 16.40.To achieve this, the ground fault loss represented by I Rgr
2
(Igr being the active current and R the ground resistance)should be higher than the electrostatic loss to ground, asexplained in Example 16.4.
Since a reactor can only offset or over-compensatethe capacitive kVA, it will not improve the p.f. of theground circuit and hence not yield the same result as aresistance. Resistance grounding is therefore preferredto reactance grounding. The GFF, however, will now be

16/614 Electrical Power Engineering Reference & Applications Handbook
higher and may rise to 3 times. The phase to neutralvoltage in the healthy phases may rise to the line voltageduring a ground fault, as in an isolated neutral system.Machine insulation and all equipment and devicesassociated with the machine must take care of this. Thelow-resistance grounding may be achieved through adistribution transformer, with a low resistance on thesecondary side, as shown in Figure 16.40.
Example 16.4To determine the grounding parameters, consider a genera-tor rated for 200 MW, 15 kV and the ground fault currentlimited to 15 A. Considering GFF as 3, the voltage ratio ofthe grounding transformer with a 220 V secondary will be
153
3 kV:220 V◊
or 15 kV :220 V
Consider safe Igr as 10 A.
1. Electrostatic kVAConsider the following ground and other leakage capaci-tances for the sake of reference:
Generator to ground = 0.5 mFGenerator bus duct to ground = 0.15mFLow-voltage winding of GT to ground = 0.007 mFSurge capacitance = 0.2 mF\ Total coupling capacitance = 0.857 mFand coupling reactance
X cg –6 = 1
2 50 0.857 10p ¥ ¥ ¥ (for a 50 Hz system)
= 3.72 ¥ 103W
and coupling current I cc 3 = 15 000
3 3.72 10¥ ¥
� 2.33 A/per phase
3 · I cc � 6.99 A for three phases
and electrostatic kVA
= 153
6.99¥
= 60.53 kVAr
2. Ground fault lossSecondary current on fault
V1 · I1 = V2 · I2
3 153
10 10 = 220 32◊ ¥ ¥ ◊ I
\ I2 = 682 A
and required secondary resistance
R = 220682
= 0.32 W
\ I Rgr2 2 = (682) 0.32◊ ¥
= 148.8 kVA
\ I Rgr2 >> electrostatic kVAr◊
and actual current at the point of fault
I g2 2 = 10 + (2.33 3)¥
= 12.2 A
This is illustrated by a phasor diagram in Figure 16.41.
Igr � 10 A
I g < 15 A 3 ·Icc = 6.99A
I I I–
g–
gr–
cc = + 3 ◊
Figure 16.41 Phasor diagram for the ground fault current ofExample 16.4
3. Rating of transformer
= 15 ¥ 103 ¥ 10 VA
= 150 kVA, 15 kV/220 V
Short-time rating 5–10 minutes, although the relay will tripmuch earlier. For grounding schemes see Chapter 21.
64G
To grid
Generatortransformer
Busconnections
Surgearrester
200 MW
15 kV
3·Icc
Igr
Ig Igr
I2
R
3·Icc
GT – Grounding transformerIcc – Ground and other leakage currents per phase.Igr – Ground fault current through the generatorR – Secondary grounding resistance
Figure 16.40 Grounding method and flow of ground fault currentin a generator on a ground fault (Example 16.4)
mF 0.5 0.15 0.2 0.007
GT
G
64G

Captive (emergency) power generation 16/615
List of formulae used
System fault levels
Transient fault current
(i) For a single generator
Isc(r.m.s.)
= (3–f r.m.s. fault current) = Ix
r
d¢(16.1)
Ir = rated current of generator¢xd = positive phase sequence p.u. transient
reactanceIsc(r.m.s.)
= transient fault current (usually denoted asIsc). It defines the fault level of the generator.
(ii) When n number of machines are operating inparallel
IIx
nrsc
d = ¢ ◊ (16.2)
Ground fault levels of generators
When a number of machines are individually groundedand paralleled but only one is operating at a time
IIx
Ix x xg
r r
d 2 0=
3 =
3 + +
ע (16.3)
When n number of machines are operating in parallel
II
x x xng1
r
d 2 0 =
3 + +
¢ ◊ (16.4)
x2 = negative phase sequence p.u. reactance x0 = zero phase sequence p.u. reactance
When only one machine is grounded at a time
II
xn
xn
xg2
r
d 20
= 3
+ + ¢ (16.5)
n = no. of machines operating in parallel
Impedance grounding of MV generators
II
xn
xn
xn
gr
d 2 0=
3
+ + + 3r¢ (16.6)
r = additional p.u. resistance in ground circuitIg = ground fault current when ‘n’ number of machines are
operating in parallel with their neutrals separatelygrounded.
Further Reading
Bimbhra, P.S., Generalised Theory of Electrical Machines, KhannaPublication, India.
Siemens Electrical Engineering Handbook, Siemens AG, Munich,and Hayden and Sons Ltd, London, UK.
Relevant Standards
IEC
60034-1/2004
60034-3/2005
–
Title
Rotating electrical machines.Rating and performance.
Rotating electrical machines. Specific requirementsfor turbine type synchronous machines.
Specification for voltage regulation and paralleloperation of a.c. synchronous generators.
IS
4722/2001325/2002–
–
BS
BS EN 60034-1/1998
BS EN 60034-3/1996
BS 4999-140/1987
–
–
–
Relevant US Standards ANSI/NEMA and IEEE
ANSI/IEEE-115-1/1995ANSI/IEEE-446/1995
ANSI/IEEE-C37.2/2001ANSI/IEEE-C37.101/1993ANSI-C50.10/1990NEMA/MG-1/2003NEMA/MG-2/2001
Test procedures for synchronous machines. Acceptance and performance testing.Recommended practice for emergency and standby power systems for industrial and commercialapplications. (IEEE Orange Book)Electrical power system device function numbers and contact designations.Guide for generator ground protection.Synchronous machines.Motor and generators ratings, construction, testing and performance.Safety standards (enclosures) for construction and guide for selection, installation and use of rotatingmachines.
Notes1 In the table of relevant Standards while the latest editions of the Standards are provided, it is possible that revised editions have become
available or some of them are even withdrawn. With the advances in technology and/or its application, the upgrading of Standards is acontinuous process by different Standards organizations. It is therefore advisable that for more authentic references, one may consult therelevant organizations for the latest version of a Standard.
2 Some of the BS or IS Standards mentioned against IEC may not be identical.3 The year noted against each Standard may also refer to the year it was last reaffirmed and not necessarily the year of publication.


Contents
Appendix 16: Selection of power cables A16/617
A16.1 Introduction A16/619A16.2 Technical details A16/619A16.3 Service conditions A16/623A16.4 Recommended derating factors A16/623A16.5 Voltage drop A16/623A16.6 Skin and proximity effects in a multicore cable A16/625A16.7 Short-time rating of cables A16/626A16.8 Termination of cables A16/627A16.9 Energy conservation A16/627A16.10 EHV XLPE cables A16/627
Rating tables A16/629
I PVC cables A16/629II Paper insulated cables A16/633III XLPE cables A16/635
Relevant Standards A16/641
AppendixSelection ofpower cables
A16/617


Selection of power cables A16/619
Appendix 16: Selection of powercables
A16.1 IntroductionTo provide a reference for those working on power projectsor at sites, we provide some important data on differenttypes of LV and HV power cables in this appendix. Thecables described here are in use for all kinds of powerdistribution applications. Of these, XLPE cables are alsoused for power transmission applications. To help a userselect the most appropriate types of cables, we also providea brief comparative chart of the various types of cablesbeing manufactured. Tables giving the technical particularsof such cables in all voltage ratings have also beenprovided.
The selection process of power cables is almost thesame as that of a bus system discussed in Section 28.3.For simplicity we consider only the basic data for selectionwhich would suffice the majority of applications. For
accurate calculations a similar approach will be essentialas for the bus systems (Chapter 28). For site conditionsand laying arrangements which may influence the basicrating of a cable, corresponding derating factors havealso been provided. The information covered here willbe useful to users to meet their cable requirements,although the data may vary marginally for differentmanufacturers. For more data on cables, not coveredhere, reference may be made to the cable manu-facturers.
The choice of any of the cables mentioned in TableA16.1 will depend upon the site conditions, fault leveland the voltage rating of the system. A brief comparisonof all these insulating systems is given in Table A16.2.
A16.2 Technical details
We have reproduced a few Tables (A16.14-A16.31) forPVC, paper insulated and XLPE cables that are usedcommonly in all voltage ratings with aluminium and
Table A16.1 Insulating systems for cables
Sr. no. Insulating system Constituents
1 Polyvinyl chloride (PVC) A thermoplastic compound
2 Paper insulated (PI)(Figure A16.1) Impregnated paper
3 Unfilled or filled crosslinkedpolyethylene (XLPE) A thermoplastic compoundinsulated(Figure A16.2)
4 Polyethylene (PE) A thermoplastic compound. These are basically polyethylene compounds only, witha little crosslinking to save on cost. LV cables and those below 6.6 kV are costly toproduce and hence not in great use
5 Ethylene propylene (EP) rubber A synthetic rubber (butyl rubber)
6 Flame retardant low smoke cables (FRLS) The outer sheathing of such cables is made with the base insulation of chlorinatedpolymers (e.g. PVC, polythene, CSP, PCP, XLPE or EP rubber) and hence they canbe manufactured for all system voltages. All polymers are self-extinguishing andfire retardant. But in the event of fire, they propagate fire and release large volumesof dense smoke, toxic gases and HCl. When combined with water, such as duringfirefighting, they produce corrosive acids which are highly dangerous for humaninhalation. A good FRLS cable must therefore possess the following properties:– Ability to restrict the propagation of flame– Emit low smoke– The smoke emitted should not obscure visibility– Emit low acid (HCl) gas– Emit low toxic gasesTo make these polymers have the desired properties, certain additives (chemicals),as noted below, are added to the sheathing compound in specific ratios. The additivesact like flame retardants and diminish the ignitability of the insulation by loweringthe temperature of the cable, delaying ignition and resisting the spread of fire in theinsulation and the polymeric compounds– Alumina trihydrate – to achieve reduction of heat by cooling through an endothermic
process that decomposes the flame– Molybdenum trihydrate – reduces smoke– Antimony trioxide – also provides a flame retardant effect– Zinc borate – forms a protective coating of a glass-like film, retards the burning
process and protects the insulation– Calcium carbonate – emits non-flammable gases and helps to reduce the supply
of oxygen to the burning surfaces. The FRLS cables thus produced would possessthe required properties
7 Fire survival cables (FS) These are silicon rubber, glass tape or glass mica tape sheathed, with an elastomer,having fire retardant and low smoke properties

A16/620 Electrical Power Engineering Reference & Applications Handbook
Table A16.2 Comparative study of different insulating systems
Sr. Particulars PVC Paper XLPE insulated PE EP rubberno. insulated PVC sheated
1 Loss factor, tan d at 50 Hz and 20∞C 0.07 Low, 0.003 Very low, 0.0005 Very low, Low, 0.0030.0005
2 Dielectric constant at 50 Hz and 20∞C 5.8 3.5 2.3 2.3 3.0
3 A.C. dielectric strength (kV/mm) 18 40 40 30 30
4 Volume resistivity at 20∞C (W-cm) 1012–1015 1015 1017 1017 1015
5 Specific gravity (g/cm3) Very heavy, Heavy, 1.1 Very light, 0.93 Very light, Very heavy, 1.351.35–1.46 0.93
6 Thermal resistivity, ∞C (cm/W) 650 550 350 350 500
7 Flexibility at 10∞C Poor Poor Good Good Excellent
8 Abrasion resistance Good Poor Good Good Poor
9 Deformation resistance at 150∞C Poor Good Good Poor Excellent
10 Fire resistance Excellent. Poor Poor Poor PoorLow smokeand lowhalogenemissionunder fireconditions
11 Ageing resistance at100∞C Moderate Good Excellent Moderate Good120∞C Poor Moderate Good Poor Moderate150∞C Poorer Poor Moderate Poorer Poor
12 Oil resistance at 70∞C Good Poor Good Good Poor
13 Resistance to chemicals Good Moderate Excellent Good Moderate
14 Hydroscopic properties Non-hygro- Hygroscopic Non-hygroscopic Non-hygro- Hygroscopic scopic scopic
15 Voltage range LV and HV 1.1 kV to 33 6.6 kV to 550 kV Below 6.6 kV. LV and HV up toup to 11 kV kV (No LV But not in use 11 kV
due to cost) due to cost
16 Thermal rating(i) For continuous operation ∞C 70 65 90 70 85–90(ii) For short time overload ∞C 130 85 130 90 120–130(iii) For short-circuit conditions ∞C 160 160 250 150 220–250
Utilization: Different rubber(1) Higher operating tempera- compounds can
ture permits a greater operate at differentutilization of metal and temperatures.allows a higher current Special compounds arerating compared to PVC available such asand paper insulated silicon rubber thatcables. can provide yet higher
(2) A higher operating temperatures, say,temperature will necessitate up to 150∞C operatingchecking of the surround- and 350∞C duringings at the point of short-circuits.installation for any fire Utilization:hazards or adverse thermal As for XLPE cableseffects on the equipment,devices, and componentsinstalled in the vicinity.When desired, the cablemay have to be derated tooperate at lowertemperatures
17 Condition on fault Emits corrosive gases and Emits CO2 and water. Does not melt. As for PVCcauses leakage of oil. Environment friendly.Not environment friendly
18 Applicable standards IEC 60227 IEC 60055- IEC 60502-2 up to 33 kV IEC-60502-1 BS 67081 and 2 IEC 60840 above 30 kV up to IS 9968 Part I Elastomer
150 kV SS-424 24 17 – insulated cables –Swedish specification– up to 1100 V12-420 kV Part II 3.3–11 kV
(Contd)

Selection of power cables A16/621
19 Qualities and recommendations The most In common 1 Light weight, easy to lay Due to cost,for use undisputed use up to and bend not much
cable for all 11 kV but no 2 Fire retardant, has low in useLV applica- inhibition up smoke and low halogentions and up to 33 kV emission under fireto 11 kV in conditionsHV 3 Strong resistance to
deformation at hightemperatures
4 High thermal stability5 Until a few years ago paper
insulated cables had adominant position but notso with the advent ofXLPE cables (a develop-ment of the 1960s), inview of their higher thermalrating and availability in allvoltage ranges up to 550 kV.This situation isalmost similar to SF6technology over vacuum(Chapter 19). While vacuumis preferred it has limitationsin HV above 33 kV as havepaper insulated cables, whichare available up to 33 kVand have limitations beyondthis. Hence the use ofXLPE cables for HV andEHV installations
Table A16.2 (Contd.)
Sr. Particulars PVC Paper XLPE insulated PE EP rubberno. insulated PVC sheated
1 Elastomeric cablesor silicon elastomer
2 Resistant to oil,fire and heat
3 They are copperconductor cables tosave from breakages
4 Being highlyflexible, are idealfor materialhandlingapplications suchas cranes, hoists,lifts and allinstallationsmounted onmoving platforms.Used as a trailingcable for reelingand unreelingoperations
20 Likely applications – Power distribution andcontrol wiring
– Utilities, lifts, elevators– Underground railway
transport– Mining– Submersible pumps– Paper, mining– Chemicals and fertilizers– All locations that are not
fire hazardous
– Power plants for bulktransfer of energy
– Underground transmissionand distribution of power
– Chemicals and fertilizers– Underground metro– Mining– High fire risk zones– All possible applications
Material handling:– Reeling–unreeling
operations such as– Hoists– Conveyors– Lifts– Dumpers– Trailing cables– Portable drills– Earth-moving
machinery– Offshore platform
feeder cables– Ship wiring– Transportation– Railways– Ovens– Furnaces– Steel rolling mills
Notes1 Flame retardant low smoke (FRLS) cables
Where greater safety for equipment and personnel against a likely occurrence of fire is a pre-requisite FRLS coating is used on practically all types ofcables described above, as in IEEE 383, IEC 60332-1 and IEC 60754-1. This coating will restrict the spread of fire and produce a low smoke.
Applications– Hazardous locations – Hotels – Public places, for safety to life and property– High-rise buildings – Schools – Offshore platforms etc.– Hospitals – Power stations– Theatres – Offices, banks
2 Fire survival cables (FS)These are heat- and flame-proof cables suitable for high fire risk zones. In severe fire conditions, when the outer protection and insulation have beendestroyed, these cables would still maintain continuity of essential services.– Emit very low smoke.– For installations prone to ignition and fire, these cables can sustain fire for three hours as in IEC 60331, to minimize the extent of fire and consequent
damage.– This, however, is possible only in special EP rubber compounds as noted above.
Applications– Firefighting systems – Emergency lighting– Pumping – Offshore platforms– Safety alarms – All places of high fire risks

A16/622 Electrical Power Engineering Reference & Applications Handbook
1. Conductor2. Conductor screening3. Impregnated-paper
insulation4. Screening (metallized
paper)5. Tape6. Belt insulation7. Lead sheath8. Bedding9. Armouring
10. Outer serving
1
3
6
7
8
9
10
1
2
9
8
7
4
3
2
1
10
9
8
7
5
4
3
10
Belted construction in whichinsulation in the form ofcommon belt, in addition tocore insulation, is employed
Screen construction (H type) inwhich each core has its owninsulation and screen
Screened SL construction (HSLtype) which, in addition topossessing its own insulationand screen also has a separatelead sheath for each core asagainst a common lead sheathin the other two types
Extruded semi-conducting conductor shielding
Aluminium conductor
TROPOTHEN-X insulation
Extruded semi-conducting core shielding
Copper tape screening
Core identification tape
TROPODUR outer sheath
Armour
Tape wrapping
Filler
Figure A16.1 Different constructions of paper-insulated cables
Figure A16.2 Three -core XLPE cable (Courtesy: CCI)

Selection of power cables A16/623
copper conductors. For cables data not covered and othertypes of cables, refer to the manufacturers or theircatalogues.
A16.3 Service conditions
The standard parameters of installation on which theratings of the cables are based are noted in Table A16.3.
may already be many more drops in the power networkfrom the receiving point up to the final load point and allmay add up to exceed the permissible limits. (Refer toFigure A16.3 for more clarity.) During a motor start itmay be kept within 3-5%. The voltage drop in a cableduring start can be expressed by
Voltage drop = Ist · Zwhere Ist = starting current of the motor in amperes,
andZ = impedance of the cable for that length
in ohms.This value can be determined from the data available ona per km basis in cable manufacturers’ catalogues and asprovided in the various tables. For the given a.c. resistanceand inductive reactance it can be determined by:
Z = R Xac2
L2 + ohm
whereRac = a.c. resistance in ohmXL = inductive reactance in ohm
It is possible that at certain installations, even afterselecting the size of the cables on the basis of the siteconditions and the laying parameters as discussed above,a larger cable may become imperative as a consequenceof a higher voltage drop.
ExampleConsider a 55 kW motor to be switched direct on-line andinstalled, say, at 75 m from its controlgear. To select the mostappropriate cable size refer to Table 12.4, where
Ir = 100 A, and
Maximum Ist = 7 ¥ 100 A\ Recommended cable size as in Table 12.4 = 3 ¥ 70 mm2.Considering an armoured cable, as in Table A16.14, a.c.resistance/phase
Rac = 0.532 – W/1000 m at 70∞C.
and inductive reactance/phase,
XL = 0.083 W/1000 m at 50 Hz.
\ impedance Z = 0.532 + 0.0832 2
= 0.538 W/1000 m
Table A16.3 Standard service conditions
Parameter PVC PILC XLPE
Ground temperature ∞C 30 30 30Ambient air temperature ∞C 40 40 40Depth of laying in groundUp to 1.1 kV cm 75 – –3.3 to 11 kV cm 90 90 9022 and 33 kV cm – 105 10566–250 kV cm – – 150Thermal resistivity of ∞C cm/W 150 150 150soil,Thermal resistivity of ∞C cm/W 650 550 350cable insulation,
A16.4 Recommended derating factors
These are common for all types and sizes of cables,except where noted. Derating of cable ratings resultingfrom site conditions and laying parameters are providedin Tables A16.4-A16.13.
A16.5 Voltage drop
It is essential to keep the voltage drop in a power cablewithin the permissible limits, particularly for long LV cablessay, 25 m and above, similar to a bus system (Section28.6.2). This may not be necessary in HV cables, wherethe voltage drop as a percentage of the system voltagemay be low. The maximum permissible voltage variationon a system as discussed in Chapters 1 and 12 is ±6% ofthe rated voltage. Therefore, during normal operation thevoltage drop in an individual feeder cable should not bemore than 1-2% of the rated voltage for correct operationof the drive and the load. This is due to the fact that there
Table A16.4 Rating factors for variation in ambient air temperature
Air temp. ∞C 15 20 25 30 35 40 45 50 55
Rating factor PVC 1.40 1.32 1.25 1.16 1.09 1.00 0.90 0.80 0.68PILC – – 1.30 1.21 1.10 1.00 0.88 – –XLPE 1.25 1.2 1.16 1.11 1.05 1.00 0.94 0.88 0.82
Table A16.5 Rating factors for variation in ground temperature
Ground temp.∞C 15 20 25 30 35 40 45 50 55
Rating factor PVC 1.17 1.12 1.06 1.00 0.94 0.87 0.79 0.71 0.61PILC – – 1.30 1.21 1.10 1.00 0.88 – –XLPE 1.12 1.08 1.04 1.00 0.96 0.91 0.87 0.82 –

A16/624 Electrical Power Engineering Reference & Applications Handbook
Table A16.6 Rating factors for multicore cables laid on open racks in air
No. of racks No. of cables per rack
1 2 3 6 9
1 1.00 0.98 0.96 0.93 0.92
2 1.00 0.95 0.93 0.90 0.89
3 1.00 0.94 0.92 0.89 0.88
6 1.00 0.93 0.90 0.87 0.86
Arrangement 2 No. of racks No. of cables per rack
1 2 3 6 9
1 1.00 0.84 0.80 0.75 0.73
2 1.00 0.80 0.76 0.71 0.69
3 1.00 0.78 0.74 0.70 0.68
6 1.00 0.76 0.72 0.68 0.66
25mm
d
d
300 mm
25mm d
300 mm
Arrangement 1
Table A16.7 Rating factors for single core cable in trefoil circuits laid on open racks in air
No. of racks No. of circuits per rack
1 2 3
1 1.00 0.98 0.96
2 1.00 0.95 0.93
3 1.00 0.94 0.92
6 1.00 0.93 0.90
Arrangement25 mm
2d
2d
300 mm
Table A16.8 Rating factors for groups of twin and multicorecables laid directly in ground in horizontal formation
No. of Rating factor for axial spacingcables Touching 15 cm 30 cm 45 cm 60 cm
2 0.79 0.82 0.87 0.90 0.913 0.69 0.75 0.79 0.83 0.864 0.62 0.69 0.74 0.79 0.826 0.54 0.61 0.69 0.75 0.788 0.50 0.57 0.66 0.72 0.76
Table A16.9 Group rating factors for circuits of two single-corecables, side by side and touching, in horizontal formation, laiddirectly in ground
No. of Spacing (between centres of circuits)circuits Touching 15 cm 30 cm 45 cm 60 cm
2 0.79 0.86 0.91 0.93 0.953 0.69 0.78 0.84 0.88 0.914 0.64 0.73 0.81 0.86 0.886 0.56 0.67 0.77 0.83 0.878 0.51 0.65 0.75 0.82 0.86
Table A16.10 Group rating factors for circuits of three singlecore cables in trefoil and touching, horizontal formation laid directlyin ground
No. of Spacing (Between centres of circuits)circuits Touching 15 cm 30 cm 45 cm 60 cm
2 0.78 0.81 0.85 0.88 0.903 0.68 0.71 0.77 0.81 0.834 0.61 0.65 0.72 0.76 0.796 0.53 0.58 0.66 0.71 0.768 0.48 0.54 0.62 0.67 0.72
Table A16.11 Rating factor for groups of twin and multicorecables laid directly in ground in tier formation
No. of Rating factor for axial spacingcircuits Touching 15 cm 30 cm 45 cm 60 cm
4 0.60 0.67 0.73 0.76 0.786 0.51 0.57 0.63 0.67 0.698 0.45 0.51 0.57 0.57 0.61

Selection of power cables A16/625
Table A16.12 Rating factors for variation in thermal resistivityof soil (multicore cables laid directly in the ground)
Nominal Rating factor for value of thermal resistivity of soil inarea of ∞C cm/Wconductor(mm2) 100 120 150 200 250 300
25 1.14 1.08 1.00 0.91 0.84 0.7835 1.15 1.08 1.00 0.91 0.84 0.7750 1.15 1.08 1.00 0.91 0.84 0.7770 1.15 1.08 1.00 0.90 0.83 0.7695 1.15 1.08 1.00 0.90 0.83 0.76
120 1.17 1.09 1.00 0.90 0.82 0.76150 1.17 1.09 1.00 0.90 0.82 0.76185 1.18 1.09 1.00 0.89 0.81 0.75240 1.18 1.09 1.00 0.89 0.81 0.75300 1.18 1.09 1.00 0.89 0.81 0.75400 1.19 1.10 1.00 0.89 0.81 0.75500 1.21 1.10 1.00 0.89 0.81 0.75630 1.22 1.10 1.00 0.89 0.81 0.74
Table A16.13 Rating factors for variation in thermal resistivityof soil, three single-core cables laid directly in the ground (threecables in trefoil, touching)
Nominal Rating for value of thermal resistivity of soil inarea of ∞C cm /Wconductor(mm2) 100 120 150 200 250 300
25 1.19 1.09 1.00 0.88 0.80 0.7435 1.20 1.09 1.00 0.88 0.80 0.7450 1.20 1.09 1.00 0.88 0.80 0.7470 1.21 1.10 1.00 0.88 0.80 0.7495 1.22 1.10 1.00 0.88 0.80 0.74
120 1.22 1.10 1.00 0.88 0.79 0.74150 1.22 1.10 1.00 0.88 0.79 0.73185 1.22 1.10 1.00 0.88 0.79 0.73240 1.22 1.10 1.00 0.88 0.79 0.73300 1.22 1.10 1.00 0.88 0.79 0.72400 1.24 1.11 1.00 0.88 0.79 0.72500 1.24 1.11 1.00 0.88 0.79 0.72630 to 1000 1.24 1.11 1.00 0.88 0.79 0.72
Courtesy: CCI
and voltage drop during start = 7 100 0.538 751000
¥ ¥ ¥
= 28.25 V
which is almost 6.8% for a 415 V system and is not recomended.This cable size is therefore inadequate for such a feeder lengthand the next size, i.e. 3 ¥ 95 mm2, may be chosen.
However, during normal running, 3 ¥ 70 mm2 cable willhave a voltage drop of just 4.03 V (100 ¥ 0.538 ¥ 75/1000 =4.03 V), which is less than 1% of 415 V. Therefore, depend-ing upon the duty the motor may have to perform, and otherloads connected on the same bus, the design engineer wouldbe a better judge to decide whether to select a higher size ofcable or be content with this marginal case.
For clarity, voltage drop in the next size of cable, i.e. 3 ¥95 mm2, is also calculated as
Rac = 0.385 W/1000 m at 70∞CXL = 0.083 W/1000 m at 50 Hz
\ Z = 0.385 + 0.0832 2
= 0.394 W/1000 m
and the voltage drop during start
= 7 100 0.394 751000
volts¥ ¥ ¥
= 20.7 V
which is still almost 5% of a 415 V system and is again, onlymarginally suitable for such an application. For still greaterlength of feeder cable line, a yet higher size of cable may beneeded but such lengths are seldom required.
A16.6 Skin and proximity effects in a multicorecable
The influence of skin effects in a multi-core cable isalmost the same as that of a multiphase busbar system,discussed in Sections 28.7 and 28.8. However, unlike abusbar system, the resistance and inductive reactancefor various sizes of cables can be easily measured andare provided by leading manufacturers as standard practicein their technical data sheets. To this extent, making anassessment of skin effects in cables is easy compared toa busbar system. Since all the phases in a cable, of a 3-core or 31/2-core are in a regularly twisted formation
Voltage at thispoint is subjectto drops fromreceiving pointup to this point
Transformer (ifthe receiving endsupply is HV)
3f supply HV or LV atreceiving end. [Thisvoltage may be lowerthan rated because ofdistribution drops]
For suchsub-distributionsthere are furtherdrops up to thefeeding point
M M M M M M
M M M M M M
Figure A16.3 Voltage drop at various points in a distributionsystem

A16/626 Electrical Power Engineering Reference & Applications Handbook
throughout the length of the cable, they represent thecase of an ideal phase transposition (Section 28.8.4(3))and almost nullify the effect of proximity.
A16.7 Short-time rating of cables
Calculating the minimum size of cable for a particularfault level is enough and requires no more elaboratecalculations as for a bus system for the suitability of itsstructure, mounting supports and hardware etc., as discussedin Section 28.4.2. The reason is the constructional flexibilityof cables and their direct laying into trenches or on cableracks. In the event of a fault the cables will not damage thetrenches or racks. The enclosure, mounting supports andhardware etc. are absent unlike in the case of a bus system.One can therefore determine only the suitability ofaluminium size for a given fault level (thermal effect), andneed not consider any mechanical factor. Since, all the 3or 31/2 cores of the cable or even single core cables are inthe form of almost a solid mass, during a fault, dissipationof heat would be slightly less while the direct thermalinfluence of one core on the other depending upon theconfiguration of cables would be slightly more than in thecase of a bus system. But for all practical purposes equation(28.1) and Figure 28.5 for determining the minimumconductor size will be valid in the case of cables also withvery little variation, i.e.
q qtsc
2
20 = 100
(1 + )K IA
t¥ ÊË
ˆ¯ ¥ µ (28.1)
The values of qt and q are now based on the short-timetemperature and the continuous operating temperatureassumed for the various types of cables as in Table A16.2.Based on these values, the above equation can be reducedto the following for different types of cables:
IA
tsc =¥ 0.076 for PVC cables*
= 0.078 for paper insulated cables,* and
= 0.094 for XLPE cables etc*.
For the selection of cables, the same guidelines wouldapply as for a bus system in a switchgear assembly (Section13.4). The outgoing circuits that would have a diminishingvalue of fault current, due to circuit impedance, are alsonormally protected through a current limiting device. Anormal size of cable, therefore, commensurate with thethermal rating of the circuit, will be adequate in mostcases, subject to applicable deratings and voltage drops,discussed above. However, for incoming cables connectingthe incoming source of supply and the power-receivingend, an exercise to determine their minimum size for thesystem fault level would be essential, based on graphs of
A Sq.mm.10008006255004003002402251851501209570503525
16
10
I sc(
kA)
200
100
50
20
10
5.0
2.0
1.0
0.5
0.2
0.10.1 0.2 0.5 1.0 2.0 5.0 10
Time seconds (t)
(a) For PVC cables up to 11 kV, IA
tsc = 0.076
*These factors are provided by CCI. They may vary slightly fromone manufacturer to another, depending upon the grade of aluminiumbeing used and the value of a20 considered by them. Based on theabove factors, manufacturers provide the short-time rating of theircables for different types and sizes, in the shape of a graph, Iscversus t. Refer to graphs drawn in Figure A16.4(a) and (b) for PVCand XLPE cables respectively, based on the above factors. Similargraphs can be drawn for other types of cables also.
Figure A16.4 Current–time characteristics for aluminiumcables for the selection of minimum cable size for a givenfault level
I sc(
kA)
300
200
100
50
20
10
5.0
2.0
1.0
0.50.1 0.2 0.5 1.0 2.0 5.0
Time seconds (t)
(b) For XLPE cables 6.6 kV to 33 kV, IA
tsc = 0.094
A Sq.mm.1000800630500
40030024022518515012095
70
50
35
25

Selection of power cables A16/627
Figures A16.4(a) and (b) or similar graphs for other typesof cables. Refer to Figure A16.5 for more clarity. Therewill be no need to check on the mechanical strength ofcables and their supports.
A16.8 Termination of cables
This plays an important role and requires utmost care.While termination of LV PVC cables is easier with thehelp of a crimping tool, HV cables need a proper kit forjointing and end termination. The jointing material isalso manufactured by the cable manufacturers. We are notproviding details of these kits and their jointing procedures.These can be obtained from manufacturers’ catalogues.
A16.9 Energy conservation
Energy conservation in today’s scenario is mandatorywherever possible. As far as cables are concerned theirlosses can be minimised by observing the following niceties,
• Optimising cable routes: by planning a judicious plantlayout with a view to shorten the cable lengths (lossµ length)
• Selecting higher sizes of cables: as R µ1/A*, I2R lossesand so also the voltage drop can be reduced. (Care:sometimes termination of higher sizes of cables maypose a space limitation at the equipment end).
NoteFor large industrial and commercial installations usually a numberof cables may run together and call for a high derating meeting thisrequirement automatically. The above stipulation may usually applyto small installations.
A16.10 EHV XLPE cables
In today’s scenario with over-urbanization around theworld, allocating long open terrains for transmission oflarge powers is not an easy task besides the hazards ofan exposed overhead transmission network. The task hasbecome easier with the availability of EHV high ratingXLPE cables for underground transmission or EHV andHV sub-transmission and distribution over long distances.
For the benefit of readers we would like to provide abrief account of the precautions that are needed to be takenwhile installing these cables. Metallic screen (cable sheath),circulating currents and potential differences between screenand ground are vital deterrents to be carefully tackled. Itcalls for meticulous bonding of each cable screen with theground. The basic consideration is to reduce the parasiticcurrents caused by induced e.m.f. of the conductor current.Meticulous bonding as noted below can reduce thecirculating current and the consequent heating effect andalso limit the touch voltage between the screen and theground within the safe touch voltage of 65–130 V (Section22.9.6) at any point on the cable run. The cable screen canbe bonded with ground in two possible ways,
(i) Both end bondingSimilar to continuous IPB enclosures Section 31.2.2. Eachcable is grounded through screen at both ends. Now screenand ground form a closed loop, giving rise to circulatingcurrents due to induced e.m.f. in the metallic screen by thecurrent of the main conductor. This current causes heatand demands heavy derating of the main conductors(cables). See the heavy derating of cables at higher currentscompared to single point or cross-bonding methods incable laying in the tables A16.27–A16.29. These lossescan be minimized by laying the cables in trefoil formationor by adapting to technique of phase transposition.
• Trefoil formation – It is an ideal way to laying cables tonullify proximity effect and balancing the voltages. Butnow the cooling is poor and greatly affects the cableratings and not a preferred method for large rating cables.
• Flat formation – cable to cable centre distance ismaintained at ≥300 mm and technique of phasetransposition is adapted to neutralize the effect ofproximity and balancing the voltages (Section 28.8.4).
M M M Nor
mal
cab
lesi
zeN
orm
al c
able
size
M M
LV side
HV side
Cable to besuitable for systemfault level onthe HV side
Cable to besuitable for systemfault level onthe LV side
Figure A16.5 Selection of cables for power distribution system
* A – Area of cross-section of cables.

A16/628 Electrical Power Engineering Reference & Applications Handbook
The cables may be transposed at adequate intervals ofabout 500 m or so depending upon current rating of thecables as shown in Figure A16.6. Higher the rating shortershould be the distance and vice-versa for balancing thereactances and hence the voltages in the three phases.
In the process of transposition the screens of the threephase cables are also cross connected to neutralize theinduced voltages caused by adjacent phases leaving themwith the induced voltages of their own conductors only.The so reduced induced parasitic currents in the cablescreen and consequent standing voltages between themetallic screen and the ground however, still call foryet another remedial action particularly during a transientcondition. The maximum protection demand arises duringa transient condition that may magnify the circulatingcurrents hence the standing voltages to dangerous levels.Usually screen voltage limiters (SVLs) (like a non-linearresistor surge protection device (SPD) (Section 17.13)are installed at suitable intervals to limit the touch voltagewithin 65–130 V during a transient condition. SVLsstay immune under healthy condition.
NoteElectrostatic discharge (ESD) through the screen is now absentbecause of very low surface voltage and calls for no protection.
The usual practice is to ground the screen at both endsafter one complete transposition (major section), i.e. afterthree minor sections as illustrated in Figure 28.31 tofully serve the purpose of balancing the reactances. Thescreen is interrupted at these sections and connected inseries as shown in Figure A16.6. The purpose is to allow
a standing voltage between screen and ground in eachmajor section within permissible limits and eliminateexcessive circulating currents. This arrangementsubstantially enhances the current carrying capacity ofcables particularly of large conductor sizes (see TablesA16.27–A16.29). The cables now become suitable forlong underground transmissions.
(ii) Single point bondingNow the screen is grounded at one end only and insulatedfrom ground for the remaining length. Since it does notform a closed loop with the ground, the circulating currentis now eliminated. The standing voltage however, betweenscreen and ground now rises with the circuit length, cablerating and spacing between adjacent cables. It is the highestat the farthest point from one point ground bonding. SVLsdo not mitigate this situation as they operate only duringtransient conditions and stay immune under healthycondition. The rise in the standing voltage with length ofcable is a limiting factor in adapting to this method in longerroutes. This limitation is overcome with both end bondingand adapting to method of transposition as discussed above.
Tables A16.27–A16.31 describe the variations incurrent carrying capacity for different sizes of conductorsin ground or air with trefoil or flat formation adapting totechnique of single point and cross bonding at both ends.The tables also provide current ratings with both endsimple bonding. One can choose the most appropriateand economical method for his requirement dependingupon current rating and length of the circuit. Deratingfactors for site conditions and laying parameters remainthe same as for other cables.
Figure A16.6 Cross bonding system employing transposed cables (Courtesy: CCl)
Cable termination
Minor sectionB Y R
B Y R
R
Y
B
Sheath/screen
Link box
Major section
Minor section Minor section
Joint with insulated flange forsheath/screen separation
B Y R
Cable termination
R Y B
Y
B
B
R
R
Y
Coaxialbonding
cableR Y B R Y B R Y B R Y B
Link box withSVL unit
Sheath bondingLink box
R B Y RY R B YB Y R B
¸˝ÔÔ
Cabletransposition
¸˝ÔÔ
And so repeats thetransposition sequence

Selection of power cables A16/629
Tab
le A
16.1
4LV
cab
les:
Arm
oure
d tw
in a
nd m
ultic
ore
pow
er c
able
s 65
0/11
00 V
Type
No.
of
core
sC
ondu
c-T
hick
ness
Thi
ckne
ssA
rmou
ring
Thi
ckne
ssA
ppro
x.A
ppro
x.M
ax.
App
rox.
App
rox.
App
rox.
Cur
rent
ra
ting
Shor
t-N
orm
al d
eliv
ery
and
cros
s-to
r (A
l)of
PV
Cof
of P
VC
o.d.
net
wt
d.c.
a.c.
reac
tanc
eca
paci
t-ci
rcui
tse
ctio
nal
min
imum
ins
ula-
com
mon
Fla
tR
ound
oute
rof
cab
lere
sist
ance
resi
stan
ce a
t 50
Hz
ance
per
Dir
ect
inIn
duc
tIn
air
rati
ng f
orL
engt
hD
rum
siz
eA
ppro
x.ar
eano
. of
tion
cove
ring
wir
ew
ire
shea
that
20∞
Cat
phas
egr
ound
1 se
cond
gros
sw
ires
(nom
.)m
inim
umSi
ze(m
in.)
oper
atin
gw
eigh
tex
trud
edte
mp.
70∞C
No.
¥ m
m2
No.
mm
mm
mm
Dia
.m
mm
mkg
/km
W/k
mW
/km
W/k
mm F
/km
Am
psA
mps
Am
pskA
mkg
mm
(r.m
.s.)
AY
WY
2 ¥
1.5
re1
0.8
0.3
1.4
1.24
15.0
400
18.1
21.7
0.23
90.
165
1816
160.
114
1000
A10
0448
5
2 ¥
2.5
re1
0.9
0.3
1.4
1.24
16.0
460
12.1
14.5
0.22
90.
180
2521
210.
190
1000
A10
0454
0
2 ¥
4re
11.
00.
31.
41.
2417
.553
07.
418.
900.
223
0.20
032
2727
0.30
410
00A
1004
610
2 ¥
6re
11.
00.
31.
41.
2418
.561
04.
615.
540.
207
0.22
040
3435
0.45
610
00A
1004
690
2 ¥
10re
11.
00.
31.
41.
2420
.071
03.
083.
700.
198
0.25
055
4547
0.76
050
0A
1004
440
3 ¥
1.5
re1
0.8
0.3
1.4
1.24
15.5
430
18.1
21.7
0.11
90.
330
1614
130.
114
1000
A10
0451
0
3 ¥
2.5
re1
0.9
0.3
1.4
1.24
17.0
490
12.1
14.5
0.11
50.
355
2118
180.
190
1000
A10
0457
0
3 ¥
4re
11.
00.
31.
41.
2418
.058
07.
418.
900.
112
0.39
528
2323
0.30
410
00A
1004
660
3 ¥
6re
11.
00.
31.
41.
2419
.567
04.
615.
540.
104
0.43
535
3030
0.45
610
00A
1004
750
3 ¥
10re
11.
00.
31.
41.
2421
.580
03.
083.
700.
099
0.49
546
3940
0.76
050
0A
1004
485
4 ¥
1.5
re1
0.8
0.3
1.4
1.24
16.0
460
18.1
21.7
0.12
70.
330
1614
130.
114
1000
A10
0454
0
4 ¥
2.5
re1
0.9
0.3
1.4
1.24
17.5
540
12.1
14.5
0.12
30.
355
2118
180.
190
1000
A10
0462
0
4 ¥
4re
11.
00.
31.
41.
2419
.064
07.
418.
900.
119
0.39
528
2323
0.30
410
00A
1004
720
4 ¥
6re
11.
00.
31.
41.
2420
.574
04.
615.
540.
112
0.43
535
3030
0.45
610
00A
1206
880
AY
FY
2 ¥
16rm
71.
00.
34.
0¥0.
81.
4022
.579
01.
912.
300.
179
0.28
070
5859
1.22
500
A10
0448
0
2 ¥
25rm
/v6
1.2
0.3
4.0¥
0.8
1.40
25.5
990
1.20
1.44
0.17
60.
310
9076
781.
9050
0A
1004
580
2 ¥
35rm
/v6
1.2
0.3
4.0¥
0.8
1.40
27.5
1160
0.86
81.
040.
173
0.33
011
092
992.
6650
0A
1004
660
2 ¥
50rm
/v6
1.4
0.3
4.0¥
0.8
1.40
31.0
1460
0.64
10.
770
0.17
30.
350
135
115
125
3.80
500
A12
0687
0
3 ¥
16rm
71.
00.
34.
0¥0.
81.
4023
.587
01.
912.
300.
090
0.56
060
5051
1.22
500
A10
0452
0
4 ¥
10re
11.
00.
34.
0¥0.
81.
4021
.573
03.
083.
700.
107
0.49
546
3940
0.76
050
0A
1004
450
4 ¥
16rm
71.
00.
34.
0¥0.
81.
4025
.599
01.
912.
300.
097
0.56
060
5051
1.22
500
A10
0458
0
AY
FY
3 ¥
25sm
61.
20.
34.
0¥0.
81.
4023
.582
01.
201.
440.
088
0.62
076
6370
1.90
500
A10
0449
5
3 ¥
35sm
61.
20.
34.
0¥0.
81.
4025
.596
00.
868
1.04
0.08
60.
660
9277
862.
6650
0A
1004
560
3 ¥
50sm
61.
40.
34.
0¥0.
81.
5629
.512
100.
641
0.77
00.
086
0.70
011
095
105
3.80
500
A12
0675
0
3 ¥
70sm
121.
40.
44.
0¥0.
81.
5633
.015
000.
443
0.53
20.
083
0.73
013
511
513
05.
3250
0A
1407
940
3 ¥
95sm
151.
60.
44.
0¥0.
81.
5637
.019
000.
320
0.38
50.
083
0.76
016
514
015
57.
2250
0A
1407
1140
3 ¥
120
sm15
1.6
0.4
4.0¥
0.8
1.72
39.0
2230
0.25
30.
305
0.08
20.
780
185
155
180
9.12
500
A16
0814
50
3 ¥
150
sm15
1.8
0.5
4.0¥
0.8
1.88
43.0
2650
0.20
60.
249
0.08
20.
795
210
175
205
11.4
500
A16
0816
60
3 ¥
185
sm30
2.0
0.5
4.0¥
0.8
1.88
47.0
3180
0.16
40.
199
0.08
20.
810
235
200
240
14.1
500
B18
0920
20
3 ¥
240
sm30
2.2
0.6
4.0¥
0.8
2.20
54.0
4070
0.12
50.
152
0.07
90.
820
275
235
280
18.2
500
B20
1025
60
3 ¥
300
sm30
2.4
0.6
4.0¥
0.8
2.36
60.0
4900
0.10
00.
123
0.07
90.
825
305
260
315
22.8
500
B22
1231
50
3 ¥
400
sm53
2.6
0.7
4.0¥
0.8
2.52
66.0
6070
0.07
780.
0975
0.07
90.
830
335
290
375
30.4
500
B22
12G
3740
3 ¥
500
sm53
3.0
0.7
4.0¥
0.8
2.84
76.0
7620
0.06
050.
0767
0.07
91.
100
355
315
405
38.0
450
B24
1442
90
I P
VC
CA
BL
ES/
AL
UM
INIU
M C
ON
DU
CT
OR

A16/630 Electrical Power Engineering Reference & Applications Handbook
AY
FY
31 / 2 ¥
25/
16sm
/rm
61.
2/1.
00.
34.
0 ¥
0.8
1.40
26.0
930
1.20
1.44
0.09
40.
620
7663
701.
9050
0A
1206
600
31 / 2 ¥
35/
16sm
/rm
61.
2/1.
00.
34.
0 ¥
0.8
1.40
27.0
1060
0.86
81.
040.
093
0.66
092
7786
2.66
500
A10
0461
0
31 / 2 ¥
50/
25sm
61.
4/1.
20.
34.
0 ¥
0.8
1.56
31.0
1340
0.64
10.
770
0.09
30.
700
110
9510
53.
8050
0A
1206
810
31 / 2 ¥
70/
35sm
121.
4/1.
20.
44.
0 ¥
0.8
1.56
34.0
1690
0.44
30.
532
0.09
00.
730
135
115
130
5.32
500
A14
0710
40
31 / 2 ¥
95/
50sm
151.
6/1.
40.
44.
0 ¥
0.8
1.56
39.0
2150
0.32
00.
384
0.09
00.
760
165
140
155
7.22
500
A15
0613
60
31 / 2 ¥
120
/70
sm15
1.6/
1.4
0.5
4.0
¥ 0.
81.
7242
.025
700.
253
0.30
50.
088
0.78
018
515
518
09.
1250
0A
1608
1620
31 / 2 ¥
150
/70
sm15
1.8/
1.4
0.5
4.0
¥ 0.
81.
8847
.030
000.
206
0.24
90.
088
0.79
521
017
520
511
.450
0A
1608
1830
31 / 2 ¥
185
/95
sm30
2.0/
1.6
0.5
4.0
¥ 0.
82.
0452
.037
000.
164
0.19
90.
088
0.81
023
520
024
014
.150
0B
1809
2290
31 / 2 ¥
240
/120
sm30
2.2/
1.6
0.6
4.0
¥ 0.
82.
2058
.046
600.
125
0.15
20.
085
0.82
027
523
528
018
.250
0B
2010
2860
31 / 2 ¥
300
/150
sm30
2.4/
1.8
0.6
4.0
¥ 0.
82.
3665
.056
300.
100
0.12
30.
085
0.82
530
526
031
522
.850
0B
2212
3520
31 / 2 ¥
400
/185
sm53
2.6/
2.0
0.7
4.0
¥ 0.
82.
6872
.069
900.
0778
0.09
750.
085
0.83
033
529
037
530
.445
0B
2414
4010
31 / 2 ¥
500
/240
sm53
3.0/
2.2
0.7
4.0
¥ 0.
82.
8482
.087
100.
0605
0.07
670.
085
1.10
035
531
540
538
.035
0B
2414
4780
AY
FY
4 ¥
25sm
61.
20.
34.
0 ¥
0.8
1.40
26.0
970
1.20
1.44
0.09
70.
620
7663
701.
9050
0A
1206
620
4 ¥
35sm
61.
20.
34.
0 ¥
0.8
1.40
28.5
1170
0.86
81.
040.
094
0.66
092
7786
2.66
500
A10
0467
0
4 ¥
50sm
61.
40.
44.
0 ¥
0.8
1.56
33.0
1510
0.64
10.
770
0.09
30.
700
110
9510
53.
8050
0A
1407
950
Type
des
igna
tion
AA
lum
iniu
m c
ondu
ctor
–w
hen
it i
s th
e fi
rst
lett
er o
f ty
pe d
esig
nati
on. W
hen
type
des
igna
tion
doe
s no
t ha
ve a
n ‘A
’ pr
efix
the
n ca
ble
is w
ith
copp
er c
ondu
ctor
s.Y
Whe
n it
is
at f
irst
or
seco
nd p
lace
in
type
des
igna
tion
it
stan
ds f
or P
VC
ins
ulat
ion.
CE
Indi
vidu
al c
ore
scre
enin
g.W
Rou
nd s
teel
wir
e ar
mou
ring
.F
Fla
t st
eel
wir
e (s
trip
) ar
mou
ring
.G
bS
teel
tap
e co
unte
r-he
lix.
YW
hen
last
in
type
des
igna
tion
, it
sta
nds
for
PV
C o
uter
she
ath.
WW
Ste
el d
oubl
e-ro
und
wir
e ar
mou
r.F
FS
teel
dou
ble-
stri
p ar
mou
r.
Con
duct
or t
ypes
reC
ircu
lar,
soli
d co
nduc
tor.
rmC
ircu
lar,
stra
nded
con
duct
or (
non-
com
pact
ed).
rm/v
Cir
cula
r, st
rand
ed c
ompa
cted
con
duct
or.
smS
ecto
r sh
aped
, str
ande
d co
nduc
tor.
Cou
rtes
y:C
CI
Tab
le A
16.1
4(C
ontd
.)
Type
No.
of
core
sC
ondu
c-T
hick
ness
Thi
ckne
ssA
rmou
ring
Thi
ckne
ssA
ppro
x.A
ppro
x.M
ax.
App
rox.
App
rox.
App
rox.
Cur
rent
ra
ting
Shor
t-N
orm
al d
eliv
ery
and
cros
s-to
r (A
l)of
PV
Cof
of P
VC
o.d.
net
wt
d.c.
a.c.
reac
tanc
eca
paci
t-ci
rcui
tse
ctio
nal
min
imum
ins
ula-
com
mon
Fla
tR
ound
oute
rof
cab
lere
sist
ance
resi
stan
ceat
50
Hz
ance
per
Dir
ect
inIn
duc
tIn
air
rati
ng f
orL
engt
hD
rum
siz
eA
ppro
x.ar
eano
. of
tion
cove
ring
wir
ew
ire
shea
that
20∞
Cat
phas
egr
ound
1 se
cond
gros
sw
ires
(nom
.)m
inim
umsi
ze(m
in.)
oper
atin
gw
eigh
tex
trud
edte
mp.
70∞C
No.
¥ m
m2
No.
mm
mm
mm
Dia
.m
mm
mkg
/km
W/k
mW
/km
W/k
mm F
/km
Am
psA
mps
Am
pskA
mkg
mm
(r.m
.s.)

Selection of power cables A16/631
Tab
le A
16.1
5C
oppe
r ca
bles
650
/110
0 V
Con
duct
orM
ax.
d.c.
App
rox.
a.c
.C
urre
nt r
atin
g fo
r on
e-co
rea
Cur
rent
rat
ing
for
two
core
aC
urre
nt r
atin
g fo
r 3-
, 3.
5-,
4-co
rea
Shor
t-ci
rcui
tcr
oss-
sect
ion
resi
stan
cere
sist
ance
at
rati
ngat
20∞
Cop
erat
ing
for
1 se
cond
tem
p. (
70∞ C
)In
gro
und
In d
uct
In a
irIn
gro
und
In d
uct
In a
irIn
gro
und
In d
uct
In a
irm
m2
W/k
mW
/km
Am
pA
mp
Am
pA
mp
Am
pA
mp
Am
pA
mp
Am
pkA
(r.m
.s.)
1.5
12.1
14.5
2221
2023
2020
2117
170.
173
2.5
7.41
8.87
3029
2732
2727
2724
240.
288
44.
615.
5239
3835
4135
3536
3030
0.46
0
63.
083.
6949
4844
5044
4545
3839
0.69
0
101.
832.
1965
6460
7058
6060
5052
1.15
161.
151.
3885
8382
9075
7877
6466
1.84
250.
727
0.87
011
011
011
011
597
105
9981
902.
88
350.
524
0.62
713
012
513
014
012
012
512
099
110
4.03
500.
387
0.46
315
515
016
516
514
515
514
512
513
55.
75
700.
268
0.32
119
017
520
517
515
016
58.
05
950.
193
0.23
122
020
024
521
017
520
010
.9
120
0.15
30.
184
250
220
280
240
195
230
13.8
150
0.12
40.
149
280
245
320
270
225
265
17.3
185
0.09
910.
120
305
260
370
300
255
305
21.3
240
0.07
540.
0912
345
285
425
345
295
355
27.6
300
0.06
010.
0739
375
310
475
385
335
400
34.5
400
0.04
700.
0592
400
335
550
425
360
455
46.0
500
0.03
660.
0468
425
355
590
440
390
500
57.5
630
0.02
830.
0379
470
375
660
72.5
800
0.02
210.
0314
530
405
725
92.0
1000
0.01
760.
0271
590
435
870
115.
0
a Thr
ee s
ingl
e-co
re c
able
s la
id i
n tr
efoi
l fo
rmat
ion
Cou
rtes
y:C
CI

A16/632 Electrical Power Engineering Reference & Applications Handbook
Tab
le A
16.1
7A
rmou
red
thre
e-co
re p
ower
cab
le 3
.8/6
.6 k
V (
grou
nded
sys
tem
)
No.
of
core
sC
ondu
ctor
Thi
ckne
ssT
hick
ness
Arm
ouri
ngT
hick
ness
App
rox.
App
rox.
Max
. d.
c.A
ppro
x.A
ppro
x.A
ppro
x.C
urre
nt r
atin
gSh
ort-
Nor
mal
del
iver
yan
d cr
oss-
(Al)
of P
VC
of c
omm
onfl
at w
ire
of P
VC
o.d.
net
wt.
resi
stan
cea.
c. r
esi-
reac
tanc
eca
paci
tanc
eci
rcui
tse
ctio
nal
min
imum
insu
lati
onco
veri
ngsi
zeou
ter
ofat
stan
ce a
tat
per
phas
era
ting
area
no.
of w
ires
(nom
.)m
inim
umsh
eath
cabl
e20∞ C
oper
atin
g50
Hz
Dir
ect
InIn
air
for
Len
gth
Dru
mA
ppro
x.w
rapp
ed(m
in.)
tem
p.in
duct
1 se
cond
size
gros
s70∞C
grou
ndw
eigh
tN
o. ¥
mm
2m
mm
mm
mm
mm
mkg
/km
W/k
mW
/km
W/k
mmF
/km
Am
psA
mps
Am
pskA
mkg
(r.m
.s.)
3 ¥
25sm
63.
60.
44.
0¥0.
81.
5635
1530
1.20
1.44
0.11
90.
340
7461
701.
9050
0A
140
796
03
¥ 35
sm6
3.6
0.4
4.0¥
0.8
1.56
3817
400.
868
1.04
0.11
30.
375
8975
862.
6650
0A
150
611
603
¥ 50
sm6
3.6
0.4
4.0¥
0.8
1.72
4120
300.
641
0.77
00.
108
0.41
510
592
105
3.80
500
A 1
506
1300
3 ¥
70sm
123.
60.
54.
0¥0.
81.
7244
2370
0.44
30.
532
0.10
30.
470
130
110
130
5.32
500
A 1
608
1520
3 ¥
95sm
153.
60.
54.
0¥0.
81.
8847
2760
0.32
00.
385
0.09
80.
520
160
135
155
7.22
500
A 1
608
1710
3 ¥
120
sm15
3.6
0.5
4.0¥
0.8
1.88
4930
500.
253
0.30
50.
095
0.56
518
015
018
09.
1250
0B
180
919
603
¥ 15
0sm
153.
60.
64.
0¥0.
82.
0452
3450
0.20
60.
249
0.09
30.
720
205
170
205
11.4
500
B 1
809
2160
3 ¥
185
sm30
3.6
0.6
4.0¥
0.8
2.20
5640
100.
164
0.19
90.
090
0.77
523
019
524
014
.150
0B
201
025
303
¥ 24
0sm
303.
60.
64.
0¥0.
82.
3661
4800
0.12
50.
152
0.08
80.
860
265
230
280
18.2
500
B 2
212
3100
3 ¥
300
sm30
3.6
0.7
4.0¥
0.8
2.52
6656
300.
100
0.12
30.
086
0.94
029
525
031
522
.850
0B
221
2G35
203
¥ 40
0sm
533.
60.
74.
0¥0.
82.
6872
6690
0.07
780.
0975
0.08
41.
030
325
280
375
30.4
450
B 2
414
3870
3 ¥
500
sm53
3.6
0.7
4.0¥
0.8
2.84
7980
200.
0605
0.07
670.
082
1.12
534
530
540
538
.045
0B
241
444
70
Cou
rtes
y:C
CI
Tab
le A
16.1
6H
V C
able
s up
to
11 k
V: A
rmou
red
thre
e-co
re p
ower
cab
les
1.9/
3.3
kVa
No.
of
core
sC
ondu
ctor
Thi
ckne
ssT
hick
ness
Arm
ouri
ngT
hick
ness
App
rox.
App
rox.
Max
. d.
c.A
ppro
x.A
ppro
x.A
ppro
x.C
urre
nt r
atin
gSh
ort-
Nor
mal
del
iver
yan
d cr
oss-
(Al)
of P
VC
of c
omm
onfl
at w
ire
of P
VC
o.d.
net
wt.
resi
stan
cea.
c. r
esi-
reac
tanc
eca
paci
tanc
eci
rcui
tse
ctio
nal
min
imum
insu
lati
onco
veri
ngsi
zeou
ter
ofat
stan
ce a
tat
per
phas
era
ting
area
no.
of w
ires
(nom
.)m
inim
umsh
eath
cabl
e20∞C
oper
atin
g50
Hz
Dir
ect
InIn
air
for
Len
gth
Dru
mA
ppro
x.w
rapp
ed(m
in.)
tem
p.in
duct
1 se
cond
size
gros
s70∞ C
grou
ndw
eigh
tN
o. ¥
mm
2m
mm
mm
mm
mm
mkg
/km
W/k
mW
/km
W/k
mm F
/km
Am
psA
mps
Am
pskA
mkg
(r.m
.s.)
3 ¥
25sm
62.
30.
34.
0 ¥
0.8
1.40
28.5
1060
1.20
1.44
0.10
40.
445
7461
701.
9050
0A
120
667
03
¥ 35
sm6
2.3
0.3
4.0
¥ 0.
81.
5631
.012
600.
868
1.04
0.10
00.
500
8975
862.
6650
0A
120
677
03
¥ 50
sm6
2.3
0.4
4.0
¥ 0.
81.
5634
.014
700.
641
0.77
00.
096
0.55
510
592
105
3.80
500
A 1
407
930
3 ¥
70sm
122.
30.
44.
0¥ 0
.81.
5637
.017
600.
443
0.53
20.
091
0.63
013
011
013
05.
3250
0A
140
710
703
¥ 9
5sm
152.
30.
44.
0 ¥
0.8
1.72
40.0
2140
0.32
00.
385
0.08
80.
715
160
135
155
7.22
500
A 1
506
1360
3 ¥
120
sm15
2.3
0.5
4.0
¥ 0.
81.
7243
.024
600.
253
0.30
50.
086
0.78
518
015
018
09.
1250
0A
160
815
603
¥ 15
0sm
152.
30.
54.
0 ¥
0.8
1.88
45.0
2810
0.20
60.
249
0.08
40.
990
205
170
205
11.4
500
A 1
608
1740
3 ¥
185
sm30
2.3
0.5
4.0
¥ 0.
82.
0449
.033
000.
164
0.19
90.
083
1.08
023
019
524
014
.150
0B
180
920
903
¥ 24
0sm
302.
30.
64.
0 ¥
0.8
2.20
54.0
4050
0.12
50.
152
0.08
11.
210
265
230
280
18.2
500
B 2
010
2550
3 ¥
300
sm30
2.5
0.6
4.0
¥ 0.
82.
3660
.048
900.
100
0.12
30.
080
1.23
029
525
031
522
.850
0B
221
231
503
¥ 40
0sm
532.
70.
74.
0 ¥
0.8
2.52
67.0
6030
0.07
780.
0975
0.08
01.
275
325
280
375
30.4
500
B 2
212G
3720
3 ¥
500
sm53
3.0
0.7
4.0
¥ 0.
82.
8476
.075
100.
0605
0.07
670.
080
1.29
034
530
540
538
.045
0B
241
442
40
a The
se c
able
s ca
n be
use
d on
3.3
kV
gro
unde
d or
ung
roun
ded
syst
ems
(tha
t m
eans
the
y ta
ke a
ccou
nt o
f G
FF
(S
ecti
on 2
0.6)
Cou
rtes
y:C
CI

Selection of power cables A16/633Ta
ble
A16
.18
Arm
oure
d th
ree-
core
pow
er c
able
s 6.
35/1
1 kV
(gr
ound
ed s
yste
m)a
No.
of
core
sC
ondu
ctor
Thi
ckne
ssT
hick
ness
Arm
ouri
ngT
hick
ness
App
rox.
App
rox.
Max
. d.
c.A
ppro
x.A
ppro
x.A
ppro
x.C
urre
nt r
atin
gSh
ort-
Nor
mal
del
iver
yan
d cr
oss-
(Al)
of P
VC
of c
omm
onfl
at w
ire
of P
VC
o.d.
net
wt.
resi
stan
cea.
c. r
esi-
reac
tanc
eca
paci
tanc
eci
rcui
tse
ctio
nal
min
imum
insu
lati
onco
veri
ngsi
zeou
ter
ofat
stan
ce a
tat
per
phas
era
ting
area
no.
of w
ires
(nom
.)m
inim
umsh
eath
cabl
e20∞C
oper
atin
g50
Hz
Dir
ect
InIn
air
for
Len
gth
Dru
mA
ppro
x.w
rapp
ed(m
in.)
tem
p.in
duct
1 se
cond
size
gros
s70∞ C
grou
ndw
eigh
tN
o.¥
mm
2m
mm
mm
mm
mm
mkg
/km
W/k
mW
/ km
W/k
mm F
/km
Am
psA
mps
Am
pskA
mkg
(r.m
.s.)
3 ¥
25rm
/v6
4.2
0.5
4.0
¥ 0.
81.
7246
2470
1.20
1.44
0.13
90.
436
7361
731.
9050
0A
1608
1570
3 ¥
35rm
/v6
4.2
0.5
4.0
¥ 0.
81.
8849
2800
0.86
81.
040.
132
0.48
086
7287
2.66
500
A16
0817
303
¥ 50
rm/v
64.
20.
54.
0 ¥
0.8
1.88
5130
600.
641
0.77
00.
126
0.52
510
086
105
3.80
500
B18
0919
703
¥ 70
rm/v
124.
20.
54.
0 ¥
0.8
2.04
5535
600.
4 43
0.53
20.
119
0.58
912
510
513
05.
3250
0B
2010
2310
3 ¥
95rm
/v15
4.2
0.6
4.0
¥ 0.
82.
2060
4160
0.32
00.
385
0.11
30.
661
150
125
160
7.22
500
B20
1026
103
¥ 12
0rm
/v15
4.2
0.6
4.0
¥ 0.
82.
2064
4710
0.25
30.
305
0.10
80.
728
165
140
185
9.12
500
B22
1230
603
¥ 15
0rm
/v15
4.2
0.6
4.0
¥ 0.
82.
3667
5230
0.20
60.
249
0.10
50.
780
190
160
210
11.4
500
B22
12G
3320
3 ¥
185
rm/v
304.
20.
74.
0 ¥
0.8
2.52
7260
900.
164
0.19
90.
103
0.85
921
518
523
514
.150
0B
2311
3850
3 ¥
240
rm/v
304.
20.
74.
0 ¥
0.8
2.68
7871
700.
125
0.15
20.
099
0.95
324
521
027
018
.245
0B
2414
4090
3 ¥
300
rm/v
304.
20.
74.
0 ¥
0.8
2.68
8381
200.
100
0.12
30.
096
1.04
027
523
531
022
.835
0B
2414
3700
3 ¥
400
rm/v
534.
20.
74.
0 ¥
0.8
3.00
9296
700.
0778
0.09
750.
093
1.17
031
527
536
530
.420
0B
2414
G27
903
¥ 50
0rm
/v53
4.2
0.7
4.0
¥ 0.
83.
0099
1138
00.
0 605
0.07
670.
079
1.25
036
532
043
538
.020
0B
2616
G32
40
a Cab
les
of 6
.35/
11 k
V g
rade
(gr
ound
ed s
yste
m)
are
also
con
side
red
suit
able
for
use
on
6.6/
6.6
kV (
ung r
ound
ed s
yste
m)
Cou
rtes
y:C
CI
II P
AP
ER
IN
SUL
AT
ED
CA
BL
ES
UP
TO
33
kV
Tab
le A
16.1
96.
35/1
1 kV
(G
roun
ded
syst
em)
pape
r in
sula
ted
belte
d ca
bles
Con
duct
or (
alum
iniu
m)
Thi
ckne
ss o
fL
ead
shea
thA
rmou
ring
App
rox.
App
rox.
Nor
mal
Dru
mA
ppro
x.M
axi-
App
rox.
App
rox.
App
rox.
Cur
rent
rat
ing
Shor
t-in
sula
tion
over
net
deli
very
Size
gros
sm
uma.
c.re
act-
capa
-ci
rcui
tN
umbe
rC
ross
-C
onfi
-M
ini-
Thi
ck-
App
rox.
Thi
ck-
App
rox.
all
dia.
wei
ght
leng
thty
pew
eigh
td.
c.re
sist
-an
ce p
erci
tanc
eD
irec
tIn
In a
irra
ting
ofse
ctio
nalg
urat
ion
mum
Con
d/C
ond/
ness
dia.
ness
of
dia.
of c
able
Aof
resi
st-
ance
of
phas
e at
per
indu
ctfo
r 1
core
sar
eano
. of
cond
.sh
eath
over
each
over
deli
very
ance
at
cond
uc-
50 H
zph
ase
grou
ndse
cond
wir
es(n
om.)
(nom
.)(n
om.)
arm
our-
tape
arm
our-
leng
th20∞ C
tor
atin
g(n
om.)
ing
incl
udin
gop
erat
ing
(nom
)(n
om.)
drum
tem
p. 6
5 ∞C
mm
2m
mm
mm
mm
mm
mm
mm
mkg
/km
mm
kgW
/km
W/k
mW
/km
mF/k
mA
mps
Am
psA
mps
kA
316
RM
75.
33.
81.
527
0.5
3238
3000
500
1506
1790
1.91
2.26
0.12
00.
265
5849
501.
253
25S
M6
5.3
3.8
1.5
260.
531
3729
9050
014
0716
851.
201.
420.
110
0.31
572
6468
1.95
335
SM
65.
33.
81.
629
0.5
3439
3410
500
1506
1990
0.86
81.
030.
107
0.34
584
7480
2.73
350
SM
65.
33.
81.
731
0.5
3642
3910
700
1810
3240
0.64
10.
757
0.10
20.
390
105
9210
03.
903
70S
M12
5.3
3.8
1.8
340.
840
4749
7085
020
1048
200.
443
0.52
30.
096
0.43
513
011
512
55.
463
95S
M15
5.3
3.8
1.8
370.
843
5055
6070
020
1044
900.
320
0.37
80.
094
0.48
015
513
515
57.
413
120
SM
155.
33.
82.
039
0.8
4652
6320
600
2010
4390
0.25
30.
300
0.09
10.
525
170
155
175
9.36
315
0S
M15
5.3
3.8
2.0
420.
848
5468
5050
020
1240
300.
206
0.24
40.
089
0.56
519
017
520
011
.73
185
SM
305.
33.
82.
146
0.8
5259
7880
400
2012
3750
0.16
40.
196
0.08
70.
605
220
200
230
14.4
322
5S
M30
5.3
3.8
2.2
490.
855
6288
3035
020
1236
900.
134
0.16
00.
086
0.67
024
022
026
017
.63
240
SM
305.
33.
82.
349
0.8
5663
9220
350
2012
3830
0.12
50.
150
0.08
50.
710
250
225
275
18.7
330
0S
M30
5.3
3.8
2.4
560.
862
6910
890
500
2414
6410
0.10
00.
121
0.08
40.
750
280
250
310
23.4
340
0S
M53
5.3
3.8
2.6
600.
866
7312
570
400
2414
5990
0.07
780.
0956
0.08
10.
870
325
295
370
31.2
350
0S
M53
5.3
3.8
2.8
660.
872
8014
960
300
2616
5570
0.06
050.
0755
0.08
00.
935
365
320
435
39.0
Not
eT
hick
ness
of
lapp
ed b
eddi
ng a
ppro
x. 1
.5 m
m. T
hick
ness
of
lapp
ed s
ervi
ng a
ppro
x. 2
.0 m
mC
ourt
esy:
CC
I

A16/634 Electrical Power Engineering Reference & Applications HandbookTa
ble
A16
.20
11/1
1 kV
(U
ngro
unde
d sy
stem
) pa
per
insu
late
d be
lted
cabl
es
Con
duct
or (
alum
iniu
m)
Thi
ckne
ss o
fL
ead
shea
thA
rmou
ring
App
rox.
App
rox.
Nor
mal
Dru
mA
ppro
x.M
axi-
App
rox.
App
rox.
App
rox.
Cur
rent
rat
ing
Shor
t-in
sula
tion
over
net
deli
very
Size
gros
sm
uma.
c.re
act-
capa
-ci
rcui
tN
umbe
rC
ross
-C
onfi
-M
ini-
Thi
ck-
App
rox.
Thi
ck-
App
rox.
all
dia.
wei
ght
leng
thty
pew
eigh
ta.
c.re
sist
-an
ceci
tanc
eD
irec
tIn
In a
irra
ting
ofse
ctio
nalg
urat
ion
mum
Con
d/C
ond/
ness
dia.
ness
of
dia.
of c
able
Aof
resi
st-
ance
of
per
per
indu
ctfo
r 1
core
sar
eano
. of
cond
.sh
eath
over
each
over
deli
very
ance
at
cond
uc-
phas
e at
phas
egr
ound
seco
ndw
ires
(nom
.)(n
om.)
(nom
.)le
adta
pear
mou
r-le
ngth
20∞ C
tor
at50
Hz
shea
th(n
om.)
ing
incl
ud-
oper
atin
g(n
om.)
ing
tem
p.dr
um65∞C
mm
2m
mm
mm
mm
mm
mm
mm
mkg
/km
mm
kgW
/km
W/k
mW
/km
mF/k
mA
mps
Am
psA
mps
kA
316
RM
75.
35.
31.
630
0.5
3541
3510
500
1506
2040
1.91
2.26
0.12
00.
245
5849
501.
253
25S
M6
5.3
5.3
1.6
290.
534
4034
9050
015
0 620
301.
201.
420.
110
0.27
572
6468
1.95
335
SM
65.
35.
31.
732
0.5
3743
3940
500
1608
2300
0.86
81.
030.
107
0.30
084
7480
2.73
350
SM
65.
35.
31.
734
0.8
4046
4750
850
2010
4630
0.64
10.
757
0.10
20.
340
105
9210
03.
903
70S
M12
5.3
5.3
1 .9
370.
843
5056
0070
020
1045
200.
443
0.52
30.
096
0.38
513
011
512
55.
463
95S
M15
5.3
5.3
1.9
400.
846
5362
2055
020
1040
200.
320
0.37
80.
094
0.42
015
513
515
57.
413
120
SM
155.
35.
32.
042
0.8
4855
6860
500
2212
4210
0.25
30.
300
0.09
10.
460
170
155
175
9.36
315
0S
M15
5.3
5.3
2.1
450.
851
5875
7035
020
1232
500.
206
0.24
40.
089
0.50
019
017
520
011
.73
185
SM
305.
35.
32.
249
0.8
5562
8660
350
2012
3630
0.16
40.
196
0.08
70.
535
220
200
230
14.4
322
5S
M30
5.3
5.3
2.3
520.
858
6596
4030
022
1637
300.
134
0.16
00.
086
0.60
024
022
026
017
.63
240
SM
305.
35.
32.
452
0.8
5966
1005
055
024
1464
900.
125
0.15
00.
085
0.63
525
022
527
518
.73
300
SM
305.
35.
32.
458
0.8
6572
1157
040
024
1455
900.
100
0.12
10.
084
0.66
528
025
031
023
.43
400
SM
535.
35.
32.
763
0.8
6976
1352
035
026
1658
100.
0778
0.09
560.
081
0.77
532
529
537
031
.23
500
SM
535.
35.
32.
969
0.8
7583
1600
025
026
1650
800.
0605
0.07
550.
080
0.82
536
532
043
539
.0
Not
eT
hick
ness
of
lapp
ed b
eddi
ng a
ppro
x. 1
.5 m
m. T
hick
ness
of
lapp
ed s
ervi
ng a
ppro
x. 2
.0 m
m
Tab
le A
16.2
112
.7/2
2 kV
(G
roun
ded
syst
em)
pape
r in
sula
ted
scre
ened
(H
) ca
bles
Con
duct
or (
Alu
min
ium
)T
hick
ness
Lea
d sh
eath
Arm
ouri
ngA
ppro
x.A
ppro
x.N
orm
alD
rum
App
rox.
Max
i-A
ppro
x.A
ppro
x.A
ppro
x.C
urre
nt r
atin
gSh
ort-
ofov
erne
tde
live
rysi
zegr
oss
mum
a.c.
reac
t-ca
pa-
circ
uit
Num
ber
Cro
ss-
Con
fi-
Min
imum
insu
lati
onT
hick
-A
ppro
x.T
hick
-A
ppro
x.al
l di
a.w
eigh
tle
ngth
type
wei
ght
d.c.
resi
st-
ance
per
cita
nce
Dir
ect
InIn
air
rati
ngof
sect
iona
lgu
rati
onno
. of
(nom
.)ne
ssdi
a. o
ver
ness
of
dia.
of c
able
Aof
resi
st-
ance
of
phas
e at
per
indu
ctfo
r 1
core
sar
eaw
ires
(nom
.)le
adea
chov
erde
live
ryan
ce a
tco
nduc
-50
Hz
phas
egr
ound
seco
ndsh
eath
tape
arm
our-
leng
th20∞C
tor
at(n
om.)
ing
incl
udin
gop
erat
ing
drum
tem
p.65∞C
mm
2m
mm
mm
mm
mm
mm
mkg
/km
mm
kgW
/km
W/k
mW
/km
m F/k
mA
mps
Am
psA
mps
kA
325
RM
/V6
5.8
2.0
430.
849
5565
2050
022
1240
401.
201.
420.
147
0.21
672
6672
1.95
335
RM
/V6
5.8
2.1
450.
851
5871
9035
020
1231
200.
868
1.03
0.13
90.
239
8879
882.
733
50R
M/V
65.
82.
248
0.8
5461
7900
350
2012
3370
0.64
10.
757
0.13
20.
265
105
9710
53.
903
70R
M/V
125.
82.
351
0.8
5865
8900
300
2216
3510
0.44
30.
523
0.12
50.
296
130
120
130
5.46
395
SM
155.
82.
252
0.8
5865
9030
300
2216
3550
0.32
00.
378
0.11
60.
355
155
140
160
7.41
312
0S
M15
5.8
2.4
540.
860
6810
030
500
2414
5980
0.25
30.
300
0.11
20.
387
170
155
180
9.36
315
0S
M15
5.8
2.4
560.
863
7010
670
450
2414
5760
0.20
60.
244
0.10
80.
419
190
175
210
11.7
318
5S
M30
5.8
2.5
600.
866
7411
910
350
2616
5250
0.16
40.
195
0.10
50.
456
220
205
245
14.4
322
5S
M30
5.8
2.6
640.
870
7813
130
300
2616
5020
0.13
40.
159
0.10
20.
496
240
225
275
17.6
324
0S
M30
5.8
2.7
640.
871
7813
610
300
2616
5160
0.12
50.
149
0.10
10.
510
250
230
285
18.7
330
0S
M30
5.8
2.8
700.
876
8415
430
250
2616
4940
0.10
00.
120
0.09
80.
557
275
255
320
23.4
340
0S
M53
5.8
3.0
750.
881
9017
750
200
2818
S49
100.
0778
0.09
410.
095
0.61
731
028
538
031
.2
Not
eT
hick
ness
of
lapp
ed b
eddi
ng a
ppro
x. 1
.5 m
m. T
hick
ness
of
lapp
ed s
ervi
ng a
ppro
x. 2
.0 m
m

Selection of power cables A16/635Ta
ble
A16
.22
19/3
3 kV
(G
roun
ded
syst
em)
pape
r in
sula
ted
scre
ened
(H
) ca
bles
Con
duct
or (
Alu
min
ium
)T
hick
ness
Lea
d sh
eath
Arm
ouri
ngA
ppro
x.A
ppro
x.N
orm
alD
rum
App
rox.
Max
i-A
ppro
x.A
ppro
x.A
ppro
x.C
urre
nt r
atin
gSh
ort-
ofov
er-
net
deli
very
Size
gros
sm
uma.
c.re
act-
capa
-ci
rcui
tN
umbe
rC
ross
-C
onfi
-M
inim
umin
sula
tion
Thi
ck-
App
rox.
Thi
ck-
App
rox.
all
dia.
wei
ght
leng
thty
pew
eigh
td.
c.re
sist
-an
ce p
erci
tanc
eD
irec
tIn
In a
irra
ting
ofse
ctio
nal
gura
tion
no.
of(n
om.)
ness
dia.
ove
rne
ss o
fdi
a.of
cab
leA
ofre
sist
-an
ce o
fph
ase
atpe
rin
duct
for
1co
res
area
wir
esle
adea
chov
erde
live
ryan
ce a
tco
nduc
-50
Hz
phas
egr
ound
seco
nd(n
om.)
shea
thta
pear
mou
r-le
ngth
20∞C
tor
at(n
om.)
ing
incl
udin
gop
erat
ing
(nom
.)dr
umte
mp.
65∞C
mm
2m
mm
mm
mm
mm
mm
mm
mkg
/km
mm
kgW
/km
W/k
mW
/km
mF/k
mA
mps
Am
psA
mps
kA
370
RM
/V12
8.0
2.6
610.
867
7511
670
350
2616
5 160
0.44
30.
523
0.13
80.
239
130
120
135
5.46
395
SM
157.
62.
560
0.8
6673
1142
040
024
145 5
300.
320
0.37
80.
125
0.29
315
514
016
07.
413
120
SM
157.
62.
662
0.8
6876
1229
035
026
1653
800.
253
0.29
90.
120
0.31
917
015
518
09.
363
150
SM
157.
12.
662
0.8
6876
1246
035
026
1654
400.
206
0.24
40.
115
0.36
019
017
521
011
.73
185
SM
307.
12.
766
0.8
7280
1378
030
026
1652
100.
164
0.19
50.
111
0.39
022
020
024
014
.43
225
SM
307.
12.
869
0.8
7684
1509
025
026
1648
500.
134
0.15
90.
108
0.42
324
022
027
517
.63
240
SM
307.
12.
970
0.8
7684
1560
025
028
18S
5260
0.12
50.
149
0.10
70.
435
245
230
285
18.7
330
0S
M30
7.1
2.9
750.
882
9017
260
200
2818
S48
100.
100
0.11
90.
103
0.47
427
025
532
023
.43
400
SM
537.
13.
181
0.8
8795
1969
015
028
20S
4330
0.07
780.
0937
0.10
00.
523
310
295
380
31.2
Not
eT
hick
ness
of
lapp
ed b
eddi
ng a
ppro
x. 1
.5 m
m. T
hick
ness
of
lapp
ed s
ervi
ng a
ppro
x. 2
.0 m
m.
Cou
rtes
y:C
CI
III
XL
PE
CA
BL
ES
UP
TO
33
kV
Tab
le A
16.2
3A
rmou
red
cabl
e 3.
8/6.
6 kV
(G
roun
ded
syst
em)
No.
of
Con
duct
orN
omin
alM
inim
umA
rmou
ring
Min
imum
App
rox.
App
rox.
Nor
mal
Dru
mA
ppro
x.M
ax.
App
rox.
App
rox.
App
rox
Cur
rent
rat
ing
Shor
t-co
res
and
min
. no
.th
ickn
ess
thic
knes
sno
m.
thic
knes
sov
eral
lne
tde
live
rysi
zegr
oss
wt.
d.c.
a.c.
reac
tanc
eca
paci
tanc
eci
rcui
tcr
oss-
of w
ires
ofof
dim
ensi
ons
of P
VC
diam
eter
wei
ght
ofle
ngth
(for
resi
stan
cere
sist
ance
atpe
r ph
ase
Dir
ect
In a
irra
ting
sect
iona
lX
LP
Eco
mm
onof
fla
t w
ire
oute
rca
ble
norm
alat
at o
pera
t-50
Hz
in g
roun
dfo
r 1
area
of
insu
lati
onco
veri
ng(s
trip
)sh
eath
deli
very
20∞ C
ing
tem
p.se
cond
cond
ucto
r(w
rapp
ed)
leng
th)
90∞ C
No.
¥ m
m2
mm
mm
mm
¥ m
mm
mm
mkg
/km
mkg
W/k
mW
/km
W/k
mm f
/km
Am
psA
mps
kA (
r.m.s
.)
3 ¥
25rm
/v6
2.8
0.4
4.0
¥ 0.
81.
5640
1830
500
A 1
506
1200
1.20
1.54
0.13
00.
235
9310
02.
353
¥ 35
rm/v
62.
80.
44.
0 ¥
0.8
1.72
4321
1050
0A
160
813
800.
868
1.11
0.12
30.
260
110
120
3.29
3 ¥
50rm
/v6
2.8
0.5
4.0
¥ 0.
81.
7246
2380
500
A 1
608
1520
0.64
10.
822
0.11
70.
285
130
145
4.70
3 ¥
70rm
/v12
2.8
0.5
4.0
¥ 0.
81.
8850
2820
500
B 1
809
1850
0.44
30.
568
0.11
10.
325
160
180
6.58
3 ¥
95rm
/v15
2.8
0.5
4.0
¥ 0.
81.
8854
3300
500
B 2
010
2180
0.32
00.
410
0.10
60.
370
190
220
8.93
3 ¥
120
rm/v
152.
80.
64.
0 ¥
0.8
2.04
5938
3050
0B
201
024
400.
253
0.32
50.
102
0.41
021
525
511
.33
¥ 15
0rm
/v15
2.8
0.6
4.0
¥ 0.
82.
2062
4320
500
B 2
212
2860
0.20
60.
265
0.09
90.
440
240
285
14.1
3 ¥
185
rm/v
302.
80.
64.
0 ¥
0.8
2.20
6648
5050
0B
221
2G31
200.
164
0.21
10.
096
0.48
027
033
017
.43
¥ 24
0rm
/v30
2.8
0.7
4.0
¥ 0.
82.
3672
5870
500
B 2
311
3740
0.12
50.
161
0.09
30.
540
315
385
22.6
3 ¥
300
rm/v
303.
00.
74.
0 ¥
0.8
2.52
7869
5040
0B
261
637
400.
100
0.13
00.
092
0.55
535
544
028
.23
¥ 40
0rm
/v53
3.3
0.7
4.0
¥ 0.
82.
8489
8520
300
B 2
414
3420
0.07
780.
102
0.09
00.
575
405
510
37.6
3 ¥
500
rm/v
533.
50.
74.
0 ¥
0.8
3.00
9710
270
200
B24
14G
2910
0.06
050.
0782
0.08
90.
605
455
590
47.0
Cou
rtes
y:C
CI
Not
eF
or s
ingl
e co
re a
nd c
ompl
ete
rang
e of
cab
les
refe
r to
man
ufac
ture
r ca
talo
gues
.

A16/636 Electrical Power Engineering Reference & Applications HandbookTa
ble
A16
.24
Arm
oure
d ca
ble
6.35
/11
kV (
grou
nded
sys
tem
)
No.
of
Con
duct
orN
omin
alM
inim
umA
rmou
ring
Min
imum
App
rox.
App
rox.
Nor
mal
Dru
mA
ppro
x.M
ax.
App
rox.
App
rox.
App
rox.
Cur
rent
rat
ing
Shor
t-co
res
and
min
. no
.th
ickn
ess
thic
knes
sno
m.
thic
knes
sov
eral
lne
tde
live
rysi
zegr
oss
wt.
d.c.
a.c.
reac
tanc
eca
paci
tanc
eci
rcui
tcr
oss-
of w
ires
ofof
dim
ensi
ons
of P
VC
diam
eter
wei
ght
ofle
ngth
(for
resi
stan
cere
sist
ance
atpe
r ph
ase
Dir
ect
In a
irra
ting
sect
iona
lX
LP
Eco
mm
onof
fla
t w
ire
oute
rca
ble
norm
alat
at o
pera
t-50
Hz
in g
roun
dfo
r 1
area
of
insu
lati
onco
veri
ng(s
trip
)sh
eath
deli
very
20∞C
ing
tem
p.se
cond
cond
ucto
r(w
rapp
ed)
leng
th)
90∞C
No.
¥ m
m2
mm
mm
mm
¥ m
mm
mm
mkg
/km
mkg
W/k
mW
/km
W/k
mmf
/km
Am
psA
mps
kA (
r.m.s
.)
3 ¥
25rm
/v6
3.6
0.4
4.0
¥ 0.
81.
7244
2140
500
A16
0814
001.
201.
540.
137
0.19
593
100
2.35
3 ¥
35rm
/v6
3.6
0.5
4.0
¥ 0.
81.
7247
2420
500
A16
0815
400.
868
1.11
0.13
00.
215
110
120
3.29
3 ¥
50rm
/v6
3.6
0.5
4.0
¥ 0.
81.
8850
2710
500
A18
0917
900.
641
0.82
20.
124
0.23
513
014
54.
703
¥ 70
rm/v
123.
60.
54.
0 ¥
0.8
1.88
5431
5050
0B
2010
2100
0.44
30.
568
0.11
70.
265
160
180
6.58
3 ¥
95rm
/v15
3.6
0.6
4.0
¥ 0.
82.
0458
3700
500
B20
1023
800.
320
0.41
00.
111
0.30
019
022
08.
933
¥ 12
0rm
/v15
3.6
0.6
4.0
¥ 0.
82.
2063
4280
500
B22
1228
400.
253
0.32
50.
107
0.33
021
525
511
.33
¥ 15
0rm
/v15
3.6
0.6
4.0
¥ 0.
82.
2065
4660
500
B22
1230
300.
206
0.26
50.
104
0.35
524
028
514
.13
¥ 18
5rm
/v30
3.6
0.7
4.0
¥ 0.
82.
3670
5330
500
B23
1134
600.
164
0.21
10.
101
0.38
527
033
017
.43
¥ 24
0rm
/v30
3.6
0.7
4.0
¥ 0.
82.
5276
6300
500
B23
1139
500.
125
0.16
10.
097
0.43
531
538
522
.63
¥ 30
0rm
/v30
3.6
0.7
4.0
¥ 0.
82.
6881
7260
350
B24
1434
000.
100
0.13
00.
095
0.47
535
544
028
.23
¥ 40
0rm
/v53
3.6
0.7
4.0
¥ 0.
82.
8489
8810
300
B24
1435
000.
0778
0.10
20.
091
0.53
040
551
037
.63
¥ 50
0rm
/v53
3.6
0.7
4.0
¥ 0.
83.
0097
1031
020
0B
2414
G29
200.
0605
0.07
820.
089
0.59
045
559
047
.0
Tab
le A
16.2
5A
rmou
red
cabl
e 12
.7/2
2 kV
(gr
ound
ed s
yste
m)
No.
of
Con
duct
orN
omin
alM
inim
umA
rmou
ring
Min
imum
App
rox.
App
rox.
Nor
mal
Dru
mA
ppro
x.M
ax.
App
rox.
App
rox.
App
rox
Cur
rent
rat
ing
Shor
t-co
res
and
min
. no
.th
ickn
ess
thic
knes
sno
m.
thic
knes
sov
eral
lne
tde
live
rysi
zegr
oss
wt.
d.c.
a.c.
reac
tanc
eca
paci
tanc
eci
rcui
tcr
oss-
of w
ires
ofof
dim
ensi
ons
of P
VC
diam
eter
wei
ght
ofle
ngth
(for
resi
stan
cere
sist
ance
atpe
r ph
ase
Dir
ect
In a
irra
ting
sect
iona
lX
LP
Eco
mm
onof
fla
t w
ire
oute
rca
ble
norm
alat
at o
pera
t-50
Hz
in g
roun
dfo
r 1
area
of
insu
lati
onco
veri
ng(s
trip
)sh
eath
deli
very
20∞C
ing
tem
p.se
cond
cond
ucto
r(w
rapp
ed)
leng
th)
90∞C
No.
¥ m
m2
mm
mm
mm
¥ m
mm
mm
mkg
/km
mkg
W/k
mW
/km
W/k
mmf
/km
Am
psA
mps
kA (
r.m.s
.)
3 ¥
35rm
/v6
6.0
0.6
4.0
¥ 0.
82.
0459
3470
500
B20
1022
600.
868
1.11
0.14
70.
150
110
120
3.29
3 ¥
50rm
/v6
6.0
0.6
4.0
¥ 0.
82.
2062
3830
500
B22
1226
200.
641
0.82
20.
140
0.16
513
014
54.
703
¥ 70
rm/v
126.
00.
64.
0 ¥
0.8
2.36
6643
3050
0B
2212
G28
600.
443
0.56
80.
132
0.18
016
018
06.
583
¥ 95
rm/v
156.
00.
74.
0 ¥
0.8
2.36
7049
4050
0B
2311
3270
0.32
00.
410
0.12
50.
205
190
220
8.93
3 ¥
120
rm/v
156.
00.
74.
0 ¥
0.8
2.52
7455
8050
0B
2311
3590
0.25
30.
325
0.12
00.
220
215
255
11.3
3 ¥
150
rm/v
156.
00.
74.
0 ¥
0.8
2.68
7861
8040
0B
2616
3430
0.20
60.
265
0.11
60.
235
240
285
14.1
3 ¥
185
rm/v
306.
00.
74.
0 ¥
0.8
2.68
8268
2035
0B
2414
3250
0.16
40.
211
0.11
30.
255
265
330
17.4
3 ¥
240
rm/v
306.
00.
74.
0 ¥
0.8
2.84
8980
4030
0B
2414
3270
0.12
50.
161
0.10
80.
285
310
385
22.6
3 ¥
300
rm/v
306.
00.
74.
0 ¥
0.8
3.00
9490
8025
0B
2616
G32
300.
100
0.13
00.
105
0.31
035
044
028
.23
¥ 40
0rm
/v53
6.0
0.7
4.0
¥ 0.
83.
0010
110
420
200
B26
16G
3040
0.07
780.
102
0.10
10.
345
400
510
37.6
3 ¥
500
rm/v
536.
00.
74.
0 ¥
0.8
3.00
108
1217
020
0B
2616
G33
900.
0605
0.07
820.
097
0.38
045
059
047
.0
Cou
rtes
y:C
CI

Selection of power cables A16/637
Tab
le A
16.2
6A
rmou
red
cabl
e 19
/33
kV (
grou
nded
sys
tem
)
No.
of
Con
duct
orN
omin
alM
inim
umA
rmou
ring
Min
imum
App
rox.
App
rox.
Nor
mal
Dru
mA
ppro
x.M
ax.
App
rox.
App
rox.
App
rox.
Cur
rent
rat
ing
Shor
t-co
res
and
min
. no
.th
ickn
ess
thic
knes
sno
m.
thic
knes
sov
eral
lne
tde
live
rysi
zegr
oss
wt.
d.c.
a.c.
reac
tanc
eca
paci
tanc
eci
rcui
tcr
oss-
of w
ires
ofof
dim
ensi
ons
of P
VC
diam
eter
wei
ght
ofle
ngth
(for
resi
stan
cere
sist
ance
atpe
r ph
ase
Dir
ect
In a
irra
ting
sect
iona
lX
LP
Eco
mm
onof
fla
t w
ire
oute
rca
ble
norm
alat
at o
pera
t-50
Hz
in g
roun
dfo
r 1
area
of
insu
lati
onco
veri
ng(s
trip
)sh
eath
deli
very
20∞C
ing
tem
p.se
cond
cond
ucto
r(w
rapp
ed)
leng
th)
90∞C
No.
¥ m
m2
mm
mm
mm
¥ m
mm
mm
mkg
/km
mkg
W/k
mW
/km
W/k
mmf
/km
Am
psA
mps
kA (
r.m.s
.)
3 ¥
50rm
/v6
8.8
0.7
4.0 ¥
0.8
2.52
7653
4050
0B
2311
3470
0.64
10.
822
0.15
60.
125
130
145
4.70
3 ¥
70rm
/v12
8.8
0.7
4.0 ¥
0.8
2.68
8059
6035
0B
2414
2950
0.44
30.
568
0.14
60.
140
160
180
6.58
3 ¥
95rm
/v15
8.8
0.7
4.0¥
0.8
2.84
8467
1035
0B
2616
3310
0.32
00.
410
0.13
90.
155
190
220
8.93
3 ¥
120
rm/v
158.
80.
74.
0¥0.
82.
8489
7480
300
B24
1431
000.
253
0.32
50.
133
0.17
021
525
511
.3
3 ¥
150
rm/v
158.
80.
74.
0¥0.
83.
0092
7980
200
B24
14G
2460
0.20
60.
265
0.12
80.
180
240
285
14.1
3 ¥
185
rm/v
308.
80.
74.
0¥0.
83.
0096
8730
200
B24
14G
2610
0.16
40.
211
0.12
40.
190
265
330
17.4
3 ¥
240
rm/v
308.
80.
74.
0¥0.
83.
0010
298
2020
0B
2616
G29
200.
125
0.16
10.
119
0.21
031
038
522
.6
3 ¥
300
rm/v
308.
80.
74.
0¥0.
83.
0010
711
030
200
B26
16G
3170
0.10
00.
130
0.11
50.
230
350
440
28.2
3 ¥
400
rm/v
538.
80.
74.
0¥0.
83.
0011
412
470
200
A28
18G
3970
0.07
780.
102
0.11
00.
250
400
510
37.6
Cou
rtes
y:C
CI

A16/638 Electrical Power Engineering Reference & Applications Handbook
Table A16.27 66 kV XLPE single core cables
Cross-sectionalarea ofconductormm2
Single point bonding / Cross bonding
Trefoil formation Flat formation
In ground In air In ground In air
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
95
120
150
185
240
300
400
500
630
800
1000
1200
1600
2000
194
221
246
277
319
358
408
462
523
585
686
722
815
892
250
283
316
354
407
455
513
576
644
708
816
871
965
1038
271
312
352
402
471
537
624
722
835
953
1111
1235
1434
1613
349
401
452
515
602
685
789
904
1033
1161
1372
1503
1716
1897
202
230
257
290
335
377
431
491
560
632
723
790
907
1008
261
296
331
372
429
483
548
620
701
781
905
977
1108
1216
295
341
385
440
519
594
692
806
938
1080
1264
1416
1669
1904
380
438
496
566
666
762
882
1021
1179
1341
1592
1763
2055
2317
Cross-sectionalarea ofconductormm2
Both end bonding
Trefoil formation Flat formation
In ground In air In ground In air
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
95
120
150
185
240
300
400
500
630
800
1000
1200
1600
2000
242
272
301
334
378
417
461
507
554
595
631
660
704
736
267
307
345
391
456
516
593
678
772
866
961
1048
1176
1285
341
390
437
494
571
642
728
821
920
1013
1115
1198
1317
1415
189
211
231
255
284
309
337
365
391
415
437
453
474
490
234
258
281
305
335
359
384
407
429
447
465
477
493
505
284
324
362
408
469
524
591
662
737
806
884
946
1030
1101
357
404
449
501
570
629
697
797
837
900
976
1032
1105
1166
NoteThe above current ratings correspond to a metallic sheath/screen short circuit current capability of 31.5 kA for one second duration. For anyvariation from this value of short circuit current and duration, refer to the manufacturer.
Courtesy: CCI
191
215
239
267
305
339
380
424
471
516
554
587
639
678

Selection of power cables A16/639
Table A16.28 110/132 kV XLPE single core cables
Cross-sectionalarea ofconductormm2
Single point bonding/Cross bonding
Trefoil formation Flat formation
In ground In air In ground In air
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
185240300400500630800
1000120016002000
277319358408463523586666721816893
354407456514577646712817873969
1043
398467533618715826943
1098121914171595
510598680783898
102711551362149217071890
289335377431491560632723789906
1007
371429483548620701782905977
11081217
429505578673783910
10461223136816121838
551649742859992
114513021544170819922247
Table A16.29 220 kV XLPE single core cables
400500630800
1000120016002000
406461522585664718809869
513576645712815870961
1010
608703811927
1077119513861544
771885
121211411342147016781833
430490558630720785899990
546619699780902973
11011191
651756878
10091178131615461756
831960
110612581490164719162147
Cross-sectionalarea of conductormm2
Single point bonding / Cross bonding
Trefoil formation Flat formation
In ground In air In ground In air
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
Cross-sectionalarea ofconductormm2
Both end bonding
Trefoil formation Flat formation
In ground In air In ground In air
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
185240300400500630800
1000120016002000
268306341383428475522559593645685
336381421466513561605639668713746
390455516593679775871970
105711901303
494574646735830933
10301138122213471449
256286312341369396420443459480496
308338363389414436454473485500512
403465521591664741815897961
10501123
499570632705778853920
1003106011371200
NoteThe above current ratings correspond to a metallic sheath/screen short circuit current capability of 31.5 kA for one second duration. For anyvariation from this value of short circuit current and duration, refer to the manufacturer.
(Contd.)

A16/640 Electrical Power Engineering Reference & Applications Handbook
Table A16.29 (Contd.)
400500630800
1000120016002000
384429478525562595643670
469518566612646647713728
589674770869971
105911881286
734831935
10381152123713581440
344373400425448465493537
394419442461480493516561
585660740818904971
10711186
706784862935
1024108511741288
NoteThe above current ratings correspond to a metallic sheath/screen short circuit current capability of 31.5 kA for one second duration. Forany variation from this value of short circuit current and duration, refer to the manufacturer.Courtesy: CCI
Cross-sectionalarea ofconductormm2
Both end bonding
Trefoil formation Flat formation
In ground In air In ground In air
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
AluminiumAmps
CopperAmps
Table A16.30 Rating factors for grouping of single core XLPE cables laid direct in ground in horizontal formation
Distance betweencentres of circuits
mm
100200400600800
2000
1
111111
2
0.760.810.850.880.900.96
3
0.670.710.770.810.840.93
4
0.590.650.720.770.810.92
5
0.550.610.690.740.790.91
6
0.510.580.660.720.770.91
7
0.490.560.640.710.760.91
8
0.470.530.630.700.750.90
9
0.460.520.620.690.750.90
Number of circuits in group
Table A16.31 Conductor resistance
Copper conductorW/km
Cross-sectional area ofconductormm2
95120150185240300400500630800
1000120016002000
Aluminium conductor W /km
Max d.c. resistance of conductor at 20ºC
Copper conductorW /km
Aluminium conductorW/km
0.3200.2530.2060.1640.1250.1000.07780.06050.04690.03670.02910.02470.01860.0149
0.1930.1530.1240.09910.07540.06010.04700.03660.02830.02210.01760.01510.01130.0090
0.4110.3250.2640.2110.1610.1290.1010.07910.06220.04970.03800.03260.02510.0207
0.2460.1960.1590.1270.09720.07800.06180.04910.03930.03220.02360.02070.01630.0138
Courtesy: CCI
Approximate a.c. resistance of conductor at 90ºC

Selection of power cables A16/641
Relevant US Standards ANSI/NEMA and IEEE
ASTM D-2863/2000IEEE-383/2003NEMA/WC3/1992 (ICEA S-1981)NEMA/WC70, WC71 & WC74
SS:424 24 17
For oxygen index test.Type test of class IE electric cables for nuclear power generating stations.Rubber insulated wire and cable for the transmission and distribution of electrical energy.Cross linked polyethylene insulated wire and cable for the transmission and distribution of electri-cal energy.Swedish specifications for XLPE Cables 12-420 kV.
Notes1. In the table of relevant Standards while the latest editions of the Standards are provided, it is possible that revised editions have become
available or some of them are even withdrawn. With the advances in technology and/or its application, the upgrading of Standards isa continuous process by different Standards organizations. It is therefore advisable that for more authentic references, one may consultthe relevant organizations for the latest version of a Standard.
2. Some of the BS or IS Standards mentioned against IEC may not be identical.3. The year noted against each Standard may also refer to the year it was last reaffirmed and not necessarily the year of publication.
Relevant Standards
IEC
60055-1/2005
60183/1990
60227-1/1998
60227-2/2003
60227-3/1997
60227-4/1997
60227-5/2003
60227-6/2001
60228/2004
60332-1/2004
60332-2/2004
60502-1/2004
60502-2/2005
60754-1/1994
60754-2/1997
60811 (series)
60840/2004
62067/2001
–
–
–
–
–
Title
Paper insulated lead sheathed cables for voltages up to 18/33 kV.Tests on cables and their accessories.
Guide to the selection of HV cables.
General requirements.PVC insulated electric cables for voltages 450/750 V.
Test methods.
Non-sheathed cables for fixed wiring.
Sheathed cables for fixed wiring.
Flexible cables (chords).
Lift cables and cables for flexible connections.
Conductors for insulated cables.
Tests on electric cables under fire conditions.Test on a single vertical insulated wire or cable.
Test on a single small vertical insulated copper wire or cable.
Cross linked poly-ethylene insulated PVC sheathed cables.Power cables with extruded cross-linked insulation (XLPECables) for voltages from 1 kV-33 kV (Vm = 36 kV).
Power cables with extruded cross-linked insulation (XLPECables) for voltages from 3.8/6.6 kV to 19/36 kV.
Test on gases evolved during combustion of materials fromcables. Determination of the amount of halogen acid gas.
Determination of the degree of acidity of gases evaluatedduring the combustion of materials taken from cables bymeasuring pH and conductivity.
On electric cables
Tests for power cables with extruded insulation for ratedvoltages above 30 kV up to 150 kV (XLPE Cables).
Power cables extruded insulation and their accessories for ratedvoltages above 150 kV (Vmax-170 kV) and up to 500 kV(Vmax-550 kV) – Test Methods and requirements.
PVC insulated cables for working voltages up to and including 1100V.
For voltages up to 1100 V.
For voltages from 3.3 kV to 11 kV.
Methods of test for cables
Flexible cables for use in mines and quarries. Elastomer insulatedcables.
IS
692/2000
1554-1/2000
8130/2001
–
–
7098-2/2000
7098-2/2000
–
–
–
7098-3/1998
–
694/1990
9968-1/2000
9968-2/2000
10810/1984(1-45 parts)
14494/1998
BS
BS 6480/1997
BS 6004/2000,6500/2000 &6746/1990
BS 6360/1991
BS EN 50265-1/1999
BS EN 50265-2-2/1999
–
BS 7835/2000BS 6622/1999
BS EN 50267- 1/1999
BS EN 50267-2-3/1999
–
–
–
–
–
–
–
BS 6708/1998
ISO
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
¸
˝
ÔÔ
˛
ÔÔ
¸
˝
ÔÔ
˛
ÔÔ