2394 ieee transactions on microwave theory and …lknockae/pdf/fkd11.pdf · 2394 ieee transactions...
TRANSCRIPT

2394 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 59, NO. 10, OCTOBER 2011
Passivity-Preserving Parametric Macromodeling byMeans of Scaled and Shifted State-Space Systems
Francesco Ferranti, Member, IEEE, Luc Knockaert, Senior Member, IEEE, and Tom Dhaene, Senior Member, IEEE
Abstract—We propose a novel parametric macromodelingmethod for systems described by admittance and impedancerepresentations, which depend on multiple design variables suchas geometrical layout or substrate features. It is able to buildaccurate multivariate macromodels that are stable and passiveover the entire design space. Poles and residues are parameterizedindirectly. The proposed method is based on an efficient andreliable combination of rational identification, a procedure tofind scaling and frequency-shifting coefficients and positive inter-polation schemes. Pertinent numerical results validate the highmodeling capability of the proposed parametric macromodelingtechnique.
Index Terms—Interpolation, parametric macromodeling, pas-sivity, rational approximation.
I. INTRODUCTION
D URING a typical design process of electromagnetic (EM)systems, design space exploration, design optimization,
and sensitivity analysis are usually performed and requiremultiple frequency-domain simulations for different design pa-rameter values (e.g., layout features). Parametric macromodelsare suitable to efficiently and accurately perform these designactivities, while using multiple EM simulations may often betoo computationally expensive due to the high computationalcost per simulation. Parametric macromodels are multivariatemodels that describe the complex behavior of EM systems,which is typically characterized by the frequency (or time) andseveral design parameters, such as layout or substrate features.
Recently, some parametric macromodeling techniques able toguarantee overall stability and passivity of parametric macro-models have been proposed [1]–[4].
The techniques described in [1] and [2] are based on the pas-sive interpolation of a set of stable and passive univariate macro-models, called root macromodels, treated as input–output sys-tems. This interpolation process of input–output systems leadsto parameterize only the residues. A passive interpolation of thestate-space matrices of a set of root macromodels is proposedin [3] and[4], which provides an increased modeling capability
Manuscript received March 14, 2011; revised July 16, 2011; accepted August01, 2011. Date of publication September 15, 2011; date of current version Oc-tober 12, 2011. This work was supported by the Research Foundation Flanders(FWO).
The authors are with the Department of Information Technology, InternetBased Communication Networks and Services (IBCN), Ghent Univer-sity–IBBT, B-9050 Gent, Belgium (e-mail: [email protected];[email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TMTT.2011.2164551
with respect to [1] and [2] due to the parameterization of bothpoles and residues. Unfortunately, these methods are sensitive tothe issues related to the interpolation of state-space matrices [5]and can only deal with rational models of the same order. Thematrix solution of positive-real or bounded-real lemma is usedto perform a passivity preserving interpolation of state-spacematrices. Its computation can be carried out using linear ma-trix inequalities (LMIs) or Riccati equation solvers. The com-plexity of LMI computations can grow quickly with the numberof states . For example, the number of operations required tosolve a Riccati equation is , while the cost of solving anequivalent LMI is . The method proposed in [4] uses afinal optimization procedure with the aim of tuning the accu-racy of the parametric macromodel. This optimization step canbe computationally expensive, and it is only described for oneparameter in addition to frequency.
This paper presents a new parametric macromodeling methodfor admittance and impedance representations, whichindirectly parameterizes poles and residues and is able to guar-antee overall stability and passivity. It is based on an efficientand reliable combination of rational identification, a procedureto find scaling and frequency-shifting coefficients and positiveinterpolation schemes. No LMI computation is required andno limitation on the order of the root macromodels is present.An innovative passive interpolation of root macromodels at aninput–output level is proposed, which considerably enhancesthe modeling capability of [1] and [2] and allows to accuratelymodel highly dynamic systems due to the parameterizationof both poles and residues. The interpolation process at aninput–output level avoids the issues related to the interpolationof state-space matrices [5].
II. PARAMETRIC MACROMODELING
The proposed method aims at building a parametric macro-model that accurately describes a set of multivariatedata samples and guarantees stabilityand passivity over the entire design space. These multivariatedata samples depend on the complex frequency andseveral design variables , such as layout featuresor substrate parameters. A parametric macromodel in the form
(1)
is computed by the proposed parametric macromodelingmethod. Two data grids are used in the modeling process: anestimation grid and a validation grid. The estimation grid isutilized to build the root macromodels. The validation gridis used to validate the modeling capability of the parametricmacromodel in a set of points of the design space previously
0018-9480/$26.00 © 2011 IEEE
FERRANTI et al.: PASSIVITY-PRESERVING PARAMETRIC MACROMODELING 2395
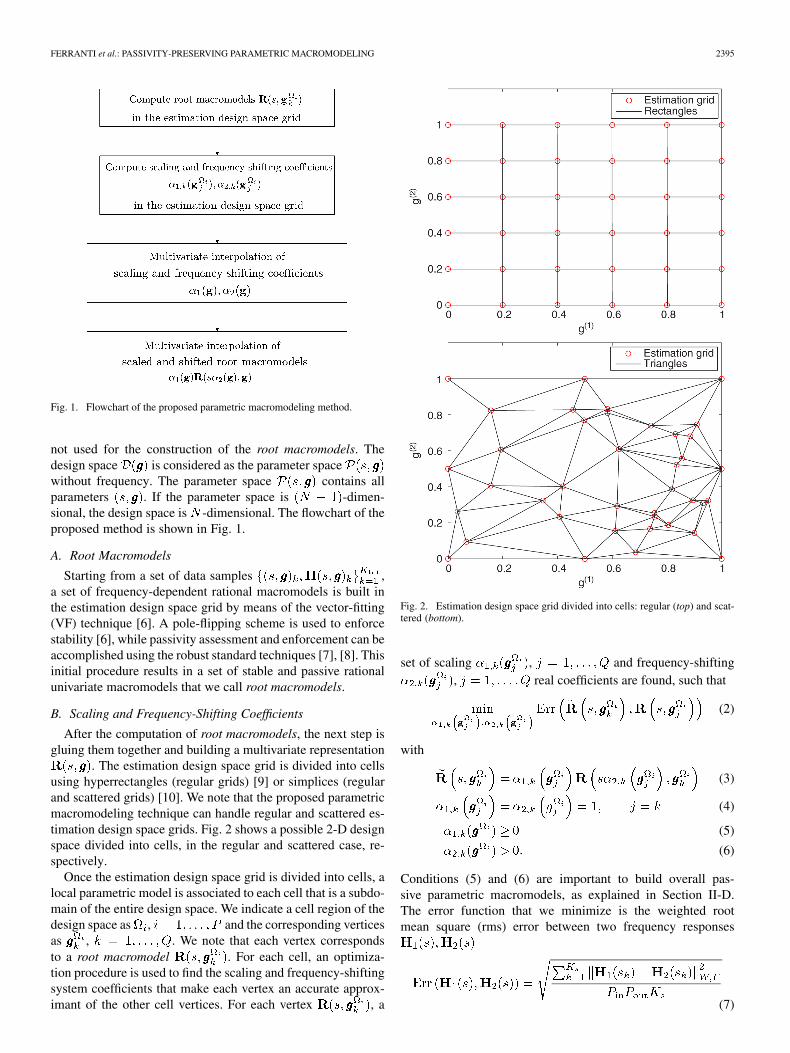
Fig. 1. Flowchart of the proposed parametric macromodeling method.
not used for the construction of the root macromodels. Thedesign space is considered as the parameter spacewithout frequency. The parameter space contains allparameters . If the parameter space is -dimen-sional, the design space is -dimensional. The flowchart of theproposed method is shown in Fig. 1.
A. Root Macromodels
Starting from a set of data samples ,a set of frequency-dependent rational macromodels is built inthe estimation design space grid by means of the vector-fitting(VF) technique [6]. A pole-flipping scheme is used to enforcestability [6], while passivity assessment and enforcement can beaccomplished using the robust standard techniques [7], [8]. Thisinitial procedure results in a set of stable and passive rationalunivariate macromodels that we call root macromodels.
B. Scaling and Frequency-Shifting Coefficients
After the computation of root macromodels, the next step isgluing them together and building a multivariate representation
. The estimation design space grid is divided into cellsusing hyperrectangles (regular grids) [9] or simplices (regularand scattered grids) [10]. We note that the proposed parametricmacromodeling technique can handle regular and scattered es-timation design space grids. Fig. 2 shows a possible 2-D designspace divided into cells, in the regular and scattered case, re-spectively.
Once the estimation design space grid is divided into cells, alocal parametric model is associated to each cell that is a subdo-main of the entire design space. We indicate a cell region of thedesign space as , and the corresponding verticesas , . We note that each vertex correspondsto a root macromodel . For each cell, an optimiza-tion procedure is used to find the scaling and frequency-shiftingsystem coefficients that make each vertex an accurate approx-imant of the other cell vertices. For each vertex , a
Fig. 2. Estimation design space grid divided into cells: regular (top) and scat-tered (bottom).
set of scaling , and frequency-shifting, real coefficients are found, such that
(2)
with
(3)
(4)
(5)
(6)
Conditions (5) and (6) are important to build overall pas-sive parametric macromodels, as explained in Section II-D.The error function that we minimize is the weighted rootmean square (rms) error between two frequency responses
(7)

2396 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 59, NO. 10, OCTOBER 2011
Fig. 3. Design space cell �.
where denotes the weighted Frobenius norm
(8)
and are the number of input and output ports of thesystem, respectively, and is equal to the number of frequencysamples.
The minimization problem (2) can be solved using, for ex-ample, the MATLAB [11] routines andwith , , , andas initial guess. To better clarify the proposed algorithm, let usconsider a specific cell composed of 4 root macromodel ver-tices in a 2-D design space , which is shown inFig. 3. For each vertex, a set of scaling ,and frequency-shifting , coefficients arefound solving the corresponding optimization problem (2), assummarized in Fig. 4.
If the response of the system under modeling needs tobe computed in a specific point of the design space cell
, for each vertex root macromodel, thecorresponding set of scaling and frequency-shifting coefficients
is interpolated in and a rational model
is obtained. Just as an example, letus use the piecewise multilinear method [9] for the interpola-tion, therefore we have for
(9)
(10)
Fig. 4. Scaling and frequency-shifting system coefficients for the design spacecell ���.
where each interpolation kernel function ,is selected as in piecewise linear interpolation. Thisstep is shown in Fig. 5. We note that if a generic root

FERRANTI et al.: PASSIVITY-PRESERVING PARAMETRIC MACROMODELING 2397
Fig. 5. Scaled and frequency-shifted root macromodels for the design space
point ��� .
macromodel has the state-space representation, then a corresponding scaled and fre-
quency-shifted version has the state-spacerepresentation with
(11)
Finally, the set of modified root macromodels
, is interpolated at aninput–output level [1], [2]
(12)
to evaluate the parametric macromodel in . This last step
is shown in Fig. 6. Since is a weighted combinationof state-space models, its state-space matrices are related to
those of , asin the operation of addition of systems [12]. The extension ofthe described procedure to the general multidimensional case isstraightforward.
Scaling coefficients can be extended to scaling matricessuch that
Fig. 6. Parametric macromodel evaluated at the design space point ��� .
(13)
where the superscript is the transpose operator. Even if the useof scaling matrices can provide more flexibility in the optimiza-tion step, we verified that the use of simple scaling coefficientsleads to good results in terms of accuracy, while making the op-timization faster and independent from the number of ports. Ifa frequency-shifting coefficient is larger than one, somefrequency response dynamics beyond the maximum frequencyof interest are considered, and therefore, an extrapolation capa-bility of the related root macromodel is used. The optimizationstep will decide, based on the error function, to minimize howmuch extrapolation information can be used, if needed. The den-sity of the root macromodels in the estimation design space gridalso reflects this aspect since if the extrapolation capability ofthe root macromodels in a specific part of the design space isused and it is not accurate, it may lead to an increased numberof root macromodeld in that design space part to achieve a spe-cific accuracy.
C. Multivariate Interpolation
Stability and passivity are crucial when the macromodel isutilized in a circuit simulator for transient analysis. It is knownthat, while a passive system is also stable, the reverse is notnecessarily true. Passivity refers to the property of systems thatcannot generate more energy than they absorb through theirelectrical ports. When the system is terminated on any arbitrarypassive loads, none of them will cause the system to become un-stable. A linear network described by admittance matrixis passive if [13]:
1) for all , where the is the complexconjugate operator;
2) is analytic in ;3) is a positive-real matrix, i.e.,
; and any arbitrary vector .Under the assumptions of having a minimal and strictly stable(all poles have a negative real part) state-space realization, analternative and equivalent condition for the passivity ofrequires that the associated Hamiltonian matrix has no purelyimaginary eigenvalues [14]. Similar results are valid for a linearnetwork described by impedance matrix . The interpolated

2398 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 59, NO. 10, OCTOBER 2011
scaling and frequency-shifting real coefficientshave to satisfy (5) and (6) to ensure the passivity of the scaledand frequency-shifted root macromodel over the entire designspace.
If scaling matrices are used instead of scaling coef-ficients , no particular condition has to be satisfied by
. Multivariate interpolation schemes based on a class ofpositive interpolation operators [15] are used to parameterize
. These schemes are able to guarantee the pas-sivity of each scaled and frequency-shifted root macromodelover the entire design space by satisfying the properties (5)and (6). The same positive multivariate interpolation schemesare used to interpolate the set of modified root macromodels
, , at an input/output level,which results in a parametric macromodel, stable and passiveover the entire design space.
Multivariate interpolation can be realized by means of tensorproduct [16] or tessellation [10] methods. Any interpolationscheme based on a class of positive interpolation operators[15] can be used. In the bivariate case , each interpolatedfunction , being in turn , can bewritten as
(14)
where represents the number of root macromodels verticesof a specific subdomain and each interpolation kernel is ascalar function satisfying the following constraints:
(15)
(16)
(17)
A possible choice is to select as in piecewise linear inter-polation.
In the general multivariate case, multivariate interpolationmethods that belong to the general class of positive interpola-tion operators can be used, e.g., the piecewise multilinear andmultivariate simplicial methods [9]. We note that the interpola-tion kernel functions of these methods only depend on the de-sign space grid points and their computation does not require thesolution of a linear system to impose an interpolation constraint.Therefore, interpolating systems, matrices or scalars, does notmake any difference for the interpolation kernel functions. Inthe case of piecewise multilinear interpolation, each interpo-lated function can be written as
(18)
where each , satisfies constraints(15)–(17) and is selected as in piecewise linear interpolation.These positive interpolation schemes have been already used
in [1] and [2], where a parametric macromodel is built byinterpolating a set of root macromodels treated as input–outputsystems, while preserving overall stability and passivity. In thepresent new parametric macromodeling technique, a powerfulnovelty is introduced by the interpolation process of somescaling and frequency-shifting system coefficients. It allows toparameterize poles and residues indirectly; hence, the modelingcapability of the proposed algorithm is increased with respect to[1] and [2], where the interpolation process were only appliedto the root macromodels, and therefore, only residues wereparameterized.
D. Passivity Preserving Interpolation
A scaling coefficient or matrix is applied at theinput–output level of the system, while a frequency-shiftingcoefficient is a compression or expansion term for theLaplace variable . Considering admittance and impedancerepresentations, it is straightforward to prove that if sat-isfy (5) and (6), passivity is preserved when applied to a passivesystem. Concerning the second interpolation step, the proof ofthe passivity preserving interpolation of root macromodels canbe found in [1].
E. Method Complexity and Parallelization
As shown in Fig. 1, the proposed method is composed of thefollowing four steps with a related complexity.Step 1) The construction of the root macromodels is per-
formed using the VF method and passivity assess-ment techniques a number of times equal to thenumber of estimation design space points. Passivityenforcement techniques are used if needed. Matrix-,column-, and entry-wise fitting can be carried outusing VF, which influence the dimension of thestate-space realization of the computed VF models[17]. A matrix-wise fitting has been used in thefollowing numerical examples.
Step 2) The computation of scaling and frequency-shiftingcoefficients is performed using optimization rou-tines. We recall that using scalar scaling andfrequency-shifting coefficients leads to a good ac-curacy of parametric macromodels, while keepingthe optimization process computationally cheap andfast.
Step 3) The multivariate interpolation of scaling and fre-quency-shifting coefficients uses positive localinterpolation methods with interpolation kernelfunctions that only depend on the estimation gridpoints.
Step 4) Comments similar to those of the previous point arevalid for the multivariate interpolation of scaledand frequency-shifted root macromodels. We recallthat the estimation design space grid is divided intocells using hyperrectangles (regular grids) [9] orsimplices (regular and scattered grids) [10]. Eachcell is defined by a specific number of vertices thatare used to perform interpolation in the cell itself.The number of vertices used for the interpolationleads to a different complexity for the parametric

FERRANTI et al.: PASSIVITY-PRESERVING PARAMETRIC MACROMODELING 2399
macromodels since the final step of the proposedalgorithm carries out an interpolation process at aninput–ouput level. Therefore, the maximum orderof a parametric macromodel into a specific designspace cell is equal to the sum of the orders of theroot macromodel cell vertices. For example, thepiecewise multilinear and multivariate simplicialmethods [9] in an – design space use and
cell vertices, respectively, for the interpola-tion into a design space cell.
The state-space dimension of parametric macromodels is influ-enced by the fitting method (matrix, column, or entry wise) usedfor the root macromodels and the interpolation schemes. Allfour steps of the proposed technique have a certain degree ofparallelism:
1) since each root macromodel is independent from theothers, the construction of a single root macromodel canbe performed in parallel with the others;
2) the computation of scaling and frequency-shifting coeffi-cients can be parallelized cell by cell;
3) a parallelization cell by cell is also feasible for the multi-variate interpolation of scaling and frequency-shifting co-efficients;
4) comments similar to those of the previous point are validfor the multivariate interpolation of scaled and frequency-shifted root macromodels.
III. NUMERICAL EXAMPLES
This section presents two numerical examples to validate theproposed approach. The worst case weighted rms error overthe validation grid between parametric macromodel and data ischosen to assess the accuracy and quality of parametric macro-models
(19)
(20)
The number of poles for each root macromodel is selected adap-tively in VF by a bottom-up approach in such a way that thecorresponding weighted rms error is smaller than 0.05. The pro-posed parametric macromodeling algorithm was implementedin MATLAB R2009A [11] and all experiments were carried outon Windows platform equipped with Intel Core2 Extreme CPUQ9300 2.53-GHz and 8-GB RAM.
A. Spiral Inductor With Variable Horizontal andVertical Length
An integrated spiral inductor has been modeled in this ex-ample. The structure is shown in Fig. 7. The conductors widthis equal to 46 m. A trivariate macromodel is built as a functionof the horizontal and vertical length of the spiral inductorin addition to frequency. Their corresponding ranges are shownin Table I.
Multilinear and simplicial interpolation schemes are used forthe scaling, frequency-shifting coefficients, and modified rootmacromodels. The admittance parameters have been computed
Fig. 7. Structure of the spiral inductor.
TABLE IPARAMETERS OF THE SPIRAL INDUCTOR
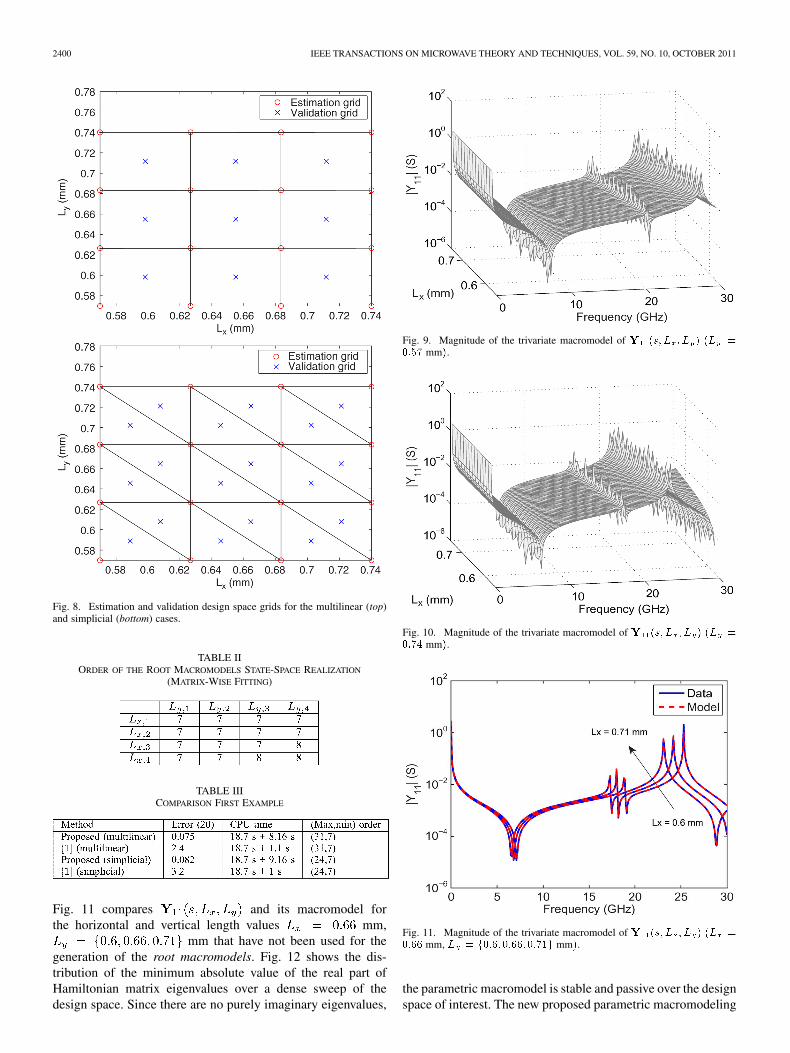
by means of ADS Momentum1 for 251 frequency samples overan estimation grid of 4 4 samples and two validationgrids of nine (multilinear case) and 18 (simplicial case)samples. The validation design space points are located in thecenter and centroid of each cell of the rectangular and triangularestimation grids, respectively, as shown in Fig. 8. We have builtthe root macromodels using VF, each with an order chosen bythe error-based bottom-up approach described in Section III.Table II shows the order of the state-space realization of the rootmacromodels.
To clearly show the enhanced modeling capability of thenew proposed method due to the innovative interpolation atan input–output level based on scaling and frequency-shiftingcoefficients, a comparison has been made between the latter andthe technique described in [1]. Table III shows some compar-ison measures: the error defined in (20), the CPU time to buildthe root macromodels and final parametric macromodels, themaximum and minimum order of the parametric macromodelsover the design space. We note the following:
• the new proposed method is considerably more accuratethan [1];
• the step of the construction of the root macromodels is thesame for all compared methods;
• the new proposed method is slightly slower than [1] due tothe optimization step;
• the order of the parametric macromodels varies over thedesign space.
Some results of the new technique using the multilinear inter-polation scheme are shown in what follows. Figs. 9 and 10 showthe magnitude of the parametric macromodel offor the vertical length values mm.
1Momentum EEsof EDA, Agilent Technologies, Santa Rosa, CA.
2400 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 59, NO. 10, OCTOBER 2011
Fig. 8. Estimation and validation design space grids for the multilinear (top)and simplicial (bottom) cases.
TABLE IIORDER OF THE ROOT MACROMODELS STATE-SPACE REALIZATION
(MATRIX-WISE FITTING)
TABLE IIICOMPARISON FIRST EXAMPLE
Fig. 11 compares and its macromodel forthe horizontal and vertical length values mm,
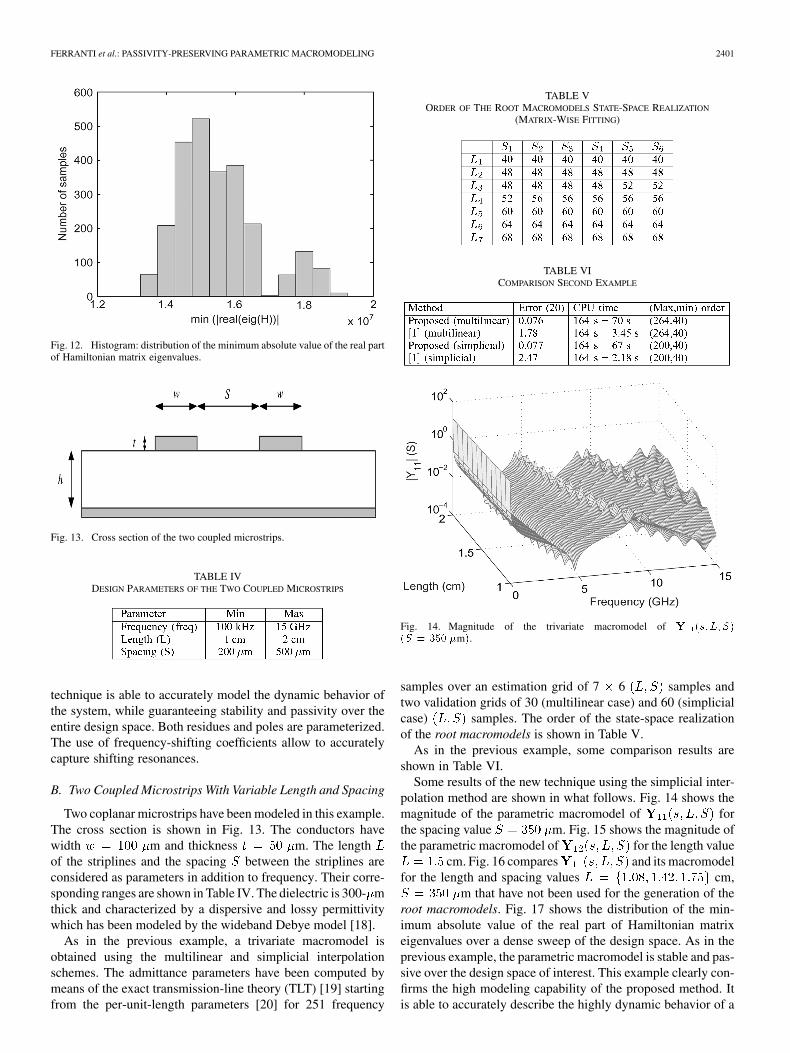
mm that have not been used for thegeneration of the root macromodels. Fig. 12 shows the dis-tribution of the minimum absolute value of the real part ofHamiltonian matrix eigenvalues over a dense sweep of thedesign space. Since there are no purely imaginary eigenvalues,
Fig. 9. Magnitude of the trivariate macromodel of � ��� � � � � �� ����� mm�.
Fig. 10. Magnitude of the trivariate macromodel of � ��� � � � � �� ����� mm�.
Fig. 11. Magnitude of the trivariate macromodel of � ��� � � � � �� ����� mm, � � �������������� mm�.
the parametric macromodel is stable and passive over the designspace of interest. The new proposed parametric macromodeling
FERRANTI et al.: PASSIVITY-PRESERVING PARAMETRIC MACROMODELING 2401
Fig. 12. Histogram: distribution of the minimum absolute value of the real partof Hamiltonian matrix eigenvalues.
Fig. 13. Cross section of the two coupled microstrips.
TABLE IVDESIGN PARAMETERS OF THE TWO COUPLED MICROSTRIPS
technique is able to accurately model the dynamic behavior ofthe system, while guaranteeing stability and passivity over theentire design space. Both residues and poles are parameterized.The use of frequency-shifting coefficients allow to accuratelycapture shifting resonances.
B. Two Coupled Microstrips With Variable Length and Spacing
Two coplanar microstrips have been modeled in this example.The cross section is shown in Fig. 13. The conductors havewidth m and thickness m. The lengthof the striplines and the spacing between the striplines areconsidered as parameters in addition to frequency. Their corre-sponding ranges are shown in Table IV. The dielectric is 300- mthick and characterized by a dispersive and lossy permittivitywhich has been modeled by the wideband Debye model [18].
As in the previous example, a trivariate macromodel isobtained using the multilinear and simplicial interpolationschemes. The admittance parameters have been computed bymeans of the exact transmission-line theory (TLT) [19] startingfrom the per-unit-length parameters [20] for 251 frequency
TABLE VORDER OF THE ROOT MACROMODELS STATE-SPACE REALIZATION
(MATRIX-WISE FITTING)
TABLE VICOMPARISON SECOND EXAMPLE
Fig. 14. Magnitude of the trivariate macromodel of � ��� �� ���� � ��� �m�.
samples over an estimation grid of 7 6 samples andtwo validation grids of 30 (multilinear case) and 60 (simplicialcase) samples. The order of the state-space realizationof the root macromodels is shown in Table V.
As in the previous example, some comparison results areshown in Table VI.
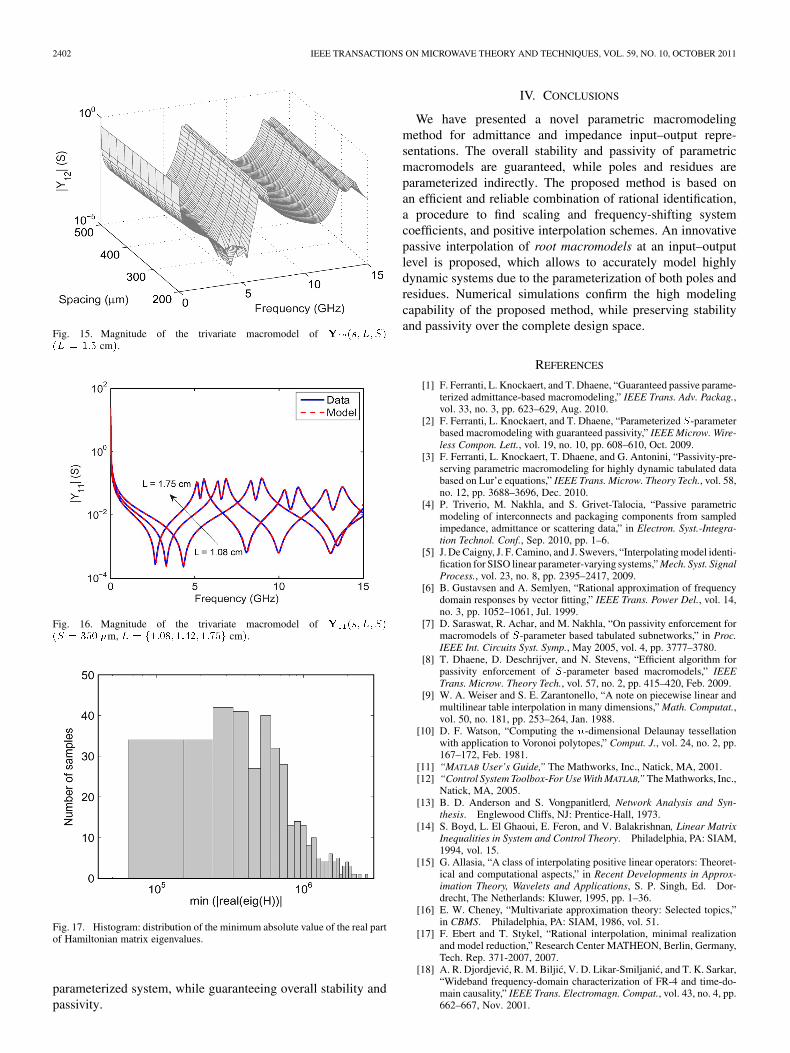
Some results of the new technique using the simplicial inter-polation method are shown in what follows. Fig. 14 shows themagnitude of the parametric macromodel of forthe spacing value m. Fig. 15 shows the magnitude ofthe parametric macromodel of for the length value
cm. Fig. 16 compares and its macromodelfor the length and spacing values cm,
m that have not been used for the generation of theroot macromodels. Fig. 17 shows the distribution of the min-imum absolute value of the real part of Hamiltonian matrixeigenvalues over a dense sweep of the design space. As in theprevious example, the parametric macromodel is stable and pas-sive over the design space of interest. This example clearly con-firms the high modeling capability of the proposed method. Itis able to accurately describe the highly dynamic behavior of a
2402 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 59, NO. 10, OCTOBER 2011
Fig. 15. Magnitude of the trivariate macromodel of � ��� �� ���� � ��� cm�.
Fig. 16. Magnitude of the trivariate macromodel of � ��� �� ���� � ��� �m, � � ������ ��� ����� cm�.
Fig. 17. Histogram: distribution of the minimum absolute value of the real partof Hamiltonian matrix eigenvalues.
parameterized system, while guaranteeing overall stability andpassivity.
IV. CONCLUSIONS
We have presented a novel parametric macromodelingmethod for admittance and impedance input–output repre-sentations. The overall stability and passivity of parametricmacromodels are guaranteed, while poles and residues areparameterized indirectly. The proposed method is based onan efficient and reliable combination of rational identification,a procedure to find scaling and frequency-shifting systemcoefficients, and positive interpolation schemes. An innovativepassive interpolation of root macromodels at an input–outputlevel is proposed, which allows to accurately model highlydynamic systems due to the parameterization of both poles andresidues. Numerical simulations confirm the high modelingcapability of the proposed method, while preserving stabilityand passivity over the complete design space.
REFERENCES
[1] F. Ferranti, L. Knockaert, and T. Dhaene, “Guaranteed passive parame-terized admittance-based macromodeling,” IEEE Trans. Adv. Packag.,vol. 33, no. 3, pp. 623–629, Aug. 2010.
[2] F. Ferranti, L. Knockaert, and T. Dhaene, “Parameterized �-parameterbased macromodeling with guaranteed passivity,” IEEE Microw. Wire-less Compon. Lett., vol. 19, no. 10, pp. 608–610, Oct. 2009.
[3] F. Ferranti, L. Knockaert, T. Dhaene, and G. Antonini, “Passivity-pre-serving parametric macromodeling for highly dynamic tabulated databased on Lur’e equations,” IEEE Trans. Microw. Theory Tech., vol. 58,no. 12, pp. 3688–3696, Dec. 2010.
[4] P. Triverio, M. Nakhla, and S. Grivet-Talocia, “Passive parametricmodeling of interconnects and packaging components from sampledimpedance, admittance or scattering data,” in Electron. Syst.-Integra-tion Technol. Conf., Sep. 2010, pp. 1–6.
[5] J. De Caigny, J. F. Camino, and J. Swevers, “Interpolating model identi-fication for SISO linear parameter-varying systems,” Mech. Syst. SignalProcess., vol. 23, no. 8, pp. 2395–2417, 2009.
[6] B. Gustavsen and A. Semlyen, “Rational approximation of frequencydomain responses by vector fitting,” IEEE Trans. Power Del., vol. 14,no. 3, pp. 1052–1061, Jul. 1999.
[7] D. Saraswat, R. Achar, and M. Nakhla, “On passivity enforcement formacromodels of �-parameter based tabulated subnetworks,” in Proc.IEEE Int. Circuits Syst. Symp., May 2005, vol. 4, pp. 3777–3780.
[8] T. Dhaene, D. Deschrijver, and N. Stevens, “Efficient algorithm forpassivity enforcement of �-parameter based macromodels,” IEEETrans. Microw. Theory Tech., vol. 57, no. 2, pp. 415–420, Feb. 2009.
[9] W. A. Weiser and S. E. Zarantonello, “A note on piecewise linear andmultilinear table interpolation in many dimensions,” Math. Computat.,vol. 50, no. 181, pp. 253–264, Jan. 1988.
[10] D. F. Watson, “Computing the �-dimensional Delaunay tessellationwith application to Voronoi polytopes,” Comput. J., vol. 24, no. 2, pp.167–172, Feb. 1981.
[11] “MATLAB User’s Guide,” The Mathworks, Inc., Natick, MA, 2001.[12] “Control System Toolbox-For Use With MATLAB,” The Mathworks, Inc.,
Natick, MA, 2005.[13] B. D. Anderson and S. Vongpanitlerd, Network Analysis and Syn-
thesis. Englewood Cliffs, NJ: Prentice-Hall, 1973.[14] S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan, Linear Matrix
Inequalities in System and Control Theory. Philadelphia, PA: SIAM,1994, vol. 15.
[15] G. Allasia, “A class of interpolating positive linear operators: Theoret-ical and computational aspects,” in Recent Developments in Approx-imation Theory, Wavelets and Applications, S. P. Singh, Ed. Dor-drecht, The Netherlands: Kluwer, 1995, pp. 1–36.
[16] E. W. Cheney, “Multivariate approximation theory: Selected topics,”in CBMS. Philadelphia, PA: SIAM, 1986, vol. 51.
[17] F. Ebert and T. Stykel, “Rational interpolation, minimal realizationand model reduction,” Research Center MATHEON, Berlin, Germany,Tech. Rep. 371-2007, 2007.
[18] A. R. Djordjevic, R. M. Biljic, V. D. Likar-Smiljanic, and T. K. Sarkar,“Wideband frequency-domain characterization of FR-4 and time-do-main causality,” IEEE Trans. Electromagn. Compat., vol. 43, no. 4, pp.662–667, Nov. 2001.

FERRANTI et al.: PASSIVITY-PRESERVING PARAMETRIC MACROMODELING 2403
[19] C. R. Paul, Analysis of Multiconductor Transmission Lines, 2nd ed.New York: Wiley, 2008.
[20] Simbeor, Electromagnetic Simulation Environment with 3-DFull-Wave Field Solver for Multi-Layered Circuits. SimberianInc., Seattle, WA, 2008.
Francesco Ferranti (M’10) received the B.S. degree(summa cum laude) in electronic engineering fromthe Università degli Studi di Palermo, Palermo, Italy,in 2005, the M.S. degree (summa cum laude withhonors) in electronic engineering from the Universitàdegli Studi dell’Aquila, L’Aquila, Italy, in 2007, andthe Ph.D. degree in electrical engineering from theUniversity of Ghent, Gent, Belgium, in 2011.
He is currently a Post-Doctoral Research Fellowwith the Department of Information Technology(INTEC), Ghent University, Gent, Belgium. His re-
search interests include parametric macromodeling, parameterized model-orderreduction, EM compatibility numerical modeling, and system identification.
Luc Knockaert (SM’00) received the M.Sc. degreein physical engineering, the M.Sc. degree in telecom-munications engineering, and the Ph.D. degree inelectrical engineering from Ghent University, Gent,Belgium, in 1974, 1977 and 1987, respectively.
From 1979 to 1984 and from 1988 to 1995, he wasinvolved with North–South cooperation and develop-ment projects with the University of the DemocraticRepublic of the Congo and the University of Burundi.He is currently affiliated with the Interdisciplinary In-stitute for BroadBand Technologies. He is currently
a Professor with the Department of Information Technology, Ghent University.He has authored or coauthored over 100 international journal and conferencepublications. His current interests are the application of linear algebra and adap-tive methods in signal estimation, model-order reduction, and computationalelectromagnetics.
Dr. Knockaert is a member of the Mathematical Association of America(MAA) and the Society for Industrial and Applied Mathematics (SIAM).
Tom Dhaene (SM’05) was born in Deinze, Belgium,on June 25, 1966. He received the Ph.D. degree inelectrotechnical engineering from the University ofGhent, Gent, Belgium, in 1993.
From 1989 to 1993, he was a Research Assistantwith the Department of Information Technology,University of Ghent, where his research focusedon different aspects of full-wave EM circuitmodeling, transient simulation, and time-domaincharacterization of high-frequency and high-speedinterconnections. In 1993, he joined the EDA com-
pany Alphabit (now part of Agilent Technologies). He was one of the keydevelopers of the planar EM simulator ADS Momentum. From September 2000to September 2007, he was a Professor with the Department of Mathematicsand Computer Science, University of Antwerp, Antwerp, Belgium. SinceOctober 2007, he has been a Full Professor with the Department of InformationTechnology (INTEC), Ghent University. He has authored or coauthored over150 peer-reviewed papers and abstracts appearing in international conferenceproceedings, journals, and books. He holds three U.S. patents.