a distributed approach for planning radio communications david kidner 1, ian fitzell 2, phillip...
TRANSCRIPT

A Distributed Approach for Planning Radio CommunicationsDavid Kidner1, Ian Fitzell2, Phillip
Rallings3,Miqdad Al Nuaimi2 & Andrew Ware3
University of Glamorgan1School of Computing
2School of Electronics
3Division of Mathematics & Computing
Pontypridd, Rhondda Cynon Taff WALES, U.K. CF37 1DLe-mail: [email protected]

Geocomputation’99 July 25th - 28th
Scope
• Spatial Data Problems & Site Selection• From Sight: Visibility Analysis• To Sound: Radio Field Planning• Topographic Modelling• Parallel Solutions• Results & Conclusions

Geocomputation’99 July 25th - 28th
Optimal Site Selection & Planning• Site selection (or location allocation)
dates back to the 1950s and 60s• However, the availability of spatial data
and GIS (including spatial modelling and analysis) opens up greater challenges– More efficient and effective analysis– Environmentally-acceptable solutions– Optimal solutions
Geocomputation’99 July 25th - 28th
From Sight: Visibility Analysis ...• GIS applications may require visibility
functions for – minimising visual intrusion
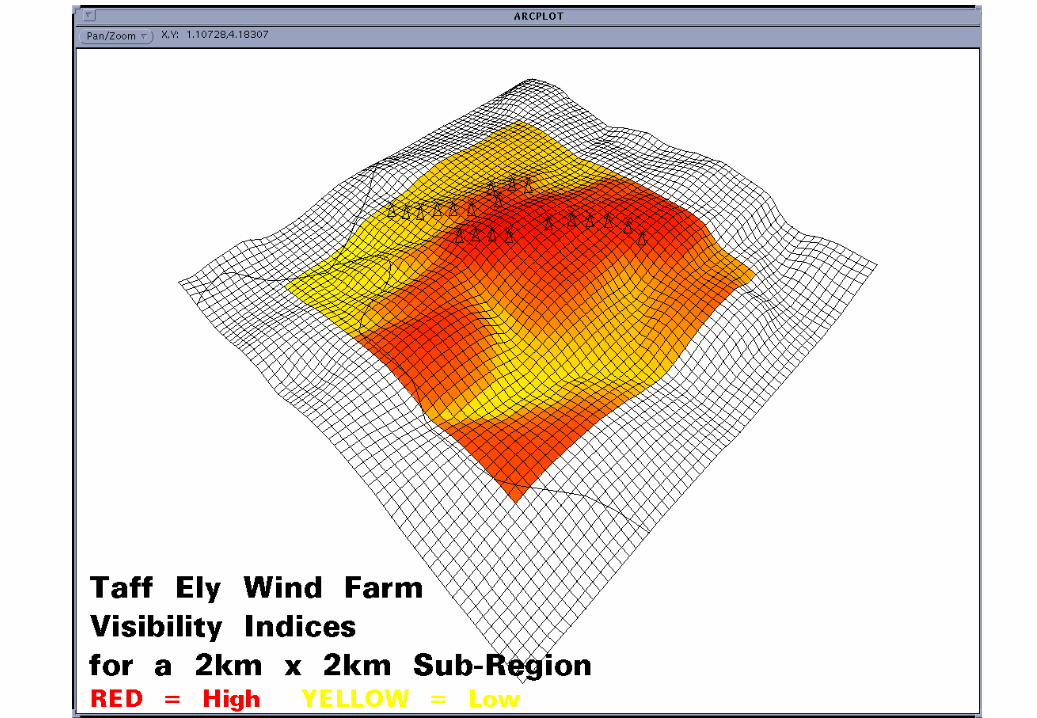
• e.g. contentious developments such as wind farms
– maximising the field-of-view• e.g. radar or missile sites
• Massive workloads, compounded by very high resolution datasets



Geocomputation’99 July 25th - 28th
To Sound: Radio Field Planning• Path loss models describe the signal
attenuation between the transmitter and receiver as a function of the propagation distance and other parameters related to the terrain profile and its surface features.
• Role of radio planning engineer is critical– increased deregulation & network providers– limited radio spectrum
Geocomputation’99 July 25th - 28th
Radio Field Planning
• Point-to-point links are generally straightforward– milliseconds to seconds
• Broadcast Coverages (to a field-of-view) – minutes to hours
• Optimal Transmitter Locations– hours to days to weeks

Geocomputation’99 July 25th - 28th
Radio Path Planning

Geocomputation’99 July 25th - 28th
Radio Communications Planning
Geocomputation’99 July 25th - 28th
Topographic Modelling
• Topographic Data Quality and Accuracy– will greatly improve application performance
– Satellite Imagery• Clutter categories (dense urban, suburban,
vegetation, water features)
– Aerial Photography (including heights)
– Existing Mapping– LiDAR
• Data Structures?

Geocomputation’99 July 25th - 28th
Airborne Laser Scanning - LiDAR (Cardiff)

Geocomputation’99 July 25th - 28th
LiDAR• Very high resolution (1 or 2m as a
DEM)• With or Without Clutter• Accurate• Cheap


Geocomputation’99 July 25th - 28th
Managing Complex Data
Geocomputation’99 July 25th - 28th
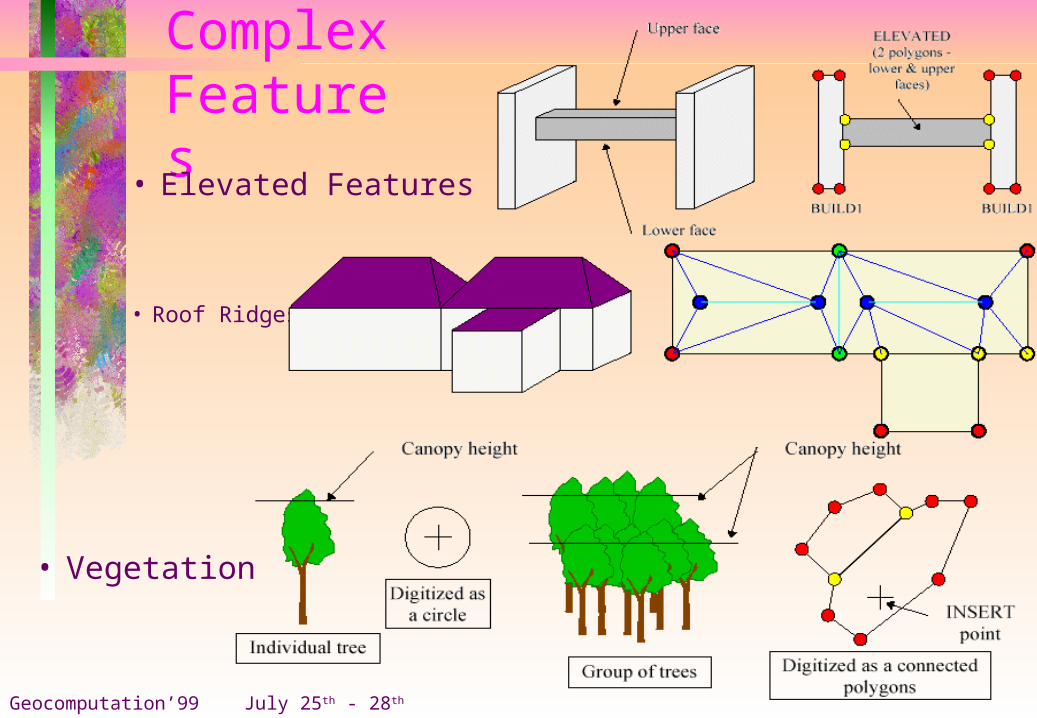
ComplexFeatures
• Elevated Features
• Vegetation
• Roof Ridges

Geocomputation’99 July 25th - 28th
Proposed 3D Standard for Topographic Data (for Radio Planning)

Geocomputation’99 July 25th - 28th
Design Issues for Parallel Algorithms• Sometimes difficult to recognise parallel
aspects of a task– If it takes 1 woman 9 months to produce a baby, how
long will it take 2 women ?– Some things are inherently sequential
• How do we split up the tasks ?– Data or Task Parallelism?
• How do we store the data ?– Shared or Distributed Memory Architecture?

Geocomputation’99 July 25th - 28th
The Need for aParallel Radio Broadcast Algorithm• Determining an optimal transmitter location

Geocomputation’99 July 25th - 28th
Previous Work
• Based on TRANSPUTERS (a distributed memory architecture, specifically designed for parallel processing)
• Very good at transferring information between processors, but little processing power and limited memory
• Transputers failed to capture the share of the processor market that they should have!

Geocomputation’99 July 25th - 28th
Parallel Workstation Cluster• Advances in the field of networks & operating
systems have provided organisations with a valuable non-specialised, general purpose parallel processing resource.
• Cluster computing can scale to provide a very large parallel machine and specialised hardware can be made available to all machines.
• Each individual machine would also have total and independent control of its own resources (e.g. memory, disk, etc.)

Geocomputation’99 July 25th - 28th
Current State of Play• We have looked at a Data Parallel approach on what is
essentially a Distributed Memory architecture.
• Looked at numerous STATIC & DYNAMIC approaches to the allocation of data.– Blocks, Quadrants, Octants, Rows/Columns, Individual Points,
etc.

Geocomputation’99 July 25th - 28th
Speed-up = elapsed time of a uniprocessor elapsed time of the multiprocessors
Efficiency = speed-up * 100 number of processors
Parallel Implementation Comparison Indicators

Geocomputation’99 July 25th - 28th
Test Data (520 Possible Transmitter Locations)

Geocomputation’99 July 25th - 28th
Speed-Up PerformanceSpeed-Up Performance
0
2
4
6
8
10
12
14
16
18
20
22
24
2 4 6 8 10 12 14 16 18 20 22 24
Number of Processors
Sp
ee
d-U
p
Sight
Sound

Geocomputation’99 July 25th - 28th
Relative Efficiency
Relative Efficiency
92
93
94
95
96
97
98
99
100
2 4 6 8 10 12 14 16 18 20 22 24
Number of Processors
%
Sight
Sound

Geocomputation’99 July 25th - 28th
Summary• Phenomenal Results!• Distributed cluster architecture is ideally
suited for spatial data processing• Dynamic partitioning is consistently
superior to static partitioning– the variability of terrain can seriously affect
load-balancing– small workloads are superior, provided
communication overheads can be minimised.