a dual extended kalman filter for tilt estimation · were acquired from the imu mpu-6050 with a 50...
TRANSCRIPT

A Dual Extended Kalman Filter for Tilt
Estimation
Herman I. Veriñaz, Edgar M. Vela, Member, IAENG, Ronald A. Ponguillo, Member, IAENG
Abstract— Accelerometers and Gyroscopes are typically used to
measure rotation angles. However, the nature of both sensors
makes difficult to estimate an angle using only one of these
sensors. This is because gyroscopes return high bias data, and,
since accelerometers detects every small acceleration in each
axis, the output of this sensor is very noisy.
A common solution is to combine both signals in so-called
sensor fusion. Two popular techniques are Complementary
Filters and Constant Gyro Bias Kalman Filters. These
algorithms are attractive because they are simple to implement
and do not depend on specific parameters of the system.
Because these filters use the arctangent function, they cannot
resolve a discontinuity on the estimated signal. This discontinuity
is caused by a flip among the two endpoints in the range of
arctangent function. This range is usually [-π/2, π/2] or [-π, π].
This problem occurs because of the discontinuous nature of the
tangent function, and because tangent is strictly not invertible.
To solve this, an additional routine must be implemented to
patch these flips.
This paper presents a practical Dual Extended Kalman Filter
algorithm for angle estimation. This work focus on the restricted
problem of measuring the angle of rotation of a body respect to
one axis parallel to the earth surface. The main characteristic of
the developed algorithm is that it does not depend on physical
parameters and does not use the inverse tangent function on its
implementation.
For the implementation, the accelerometer and gyro signals
were acquired from the IMU MPU-6050 with a 50 ms sampling
time. The complete algorithm was implemented in a MATLAB
script and then it was compared with two other methods usually
used in tilt estimation: Complementary Filters and Constant
Gyro Bias Kalman Filter.
Index Terms—Angle Estimation, Dual Extended Kalman
Filter, Sensor Fusion, Kalman Filter, Tilt Estimation.
I. INTRODUCTION
n many applications it is needed to know the orientation of
a body respect to a certain coordinate system. This work
Manuscript received March 20, 2017; revised March 28, 2017. H. I. Veriñaz is with the Escuela Superior Politécnica del Litoral, ESPOL,
Faculty of Natural Science and Mathematics, Campus Gustavo Galindo, Km
30.5 Via Perimetral, P.O. Box 09-01-5863, Guayaquil, Ecuador (e-mail: [email protected]).
E. M. Vela is an engineer in Electronics and Telecommunications,
graduated at Escuela Superior Politécnica del Litoral, ESPOL, Faculty of Electrical and Computer Engineering, Campus Gustavo Galindo, Km 30.5
Via Perimetral, P.O. Box 09-01-5863, Guayaquil, Ecuador (e-mail:
[email protected]). R. A. Ponguillo is the Coordinator of the Basic Electronics Area and a
Researcher of the Vision and Robotics Center at the Escuela Superior
Politécnica del Litoral, ESPOL, Faculty of Electrical and Computer Engineering, Campus Gustavo Galindo, Km 30.5 Via Perimetral, P.O. Box
09-01-5863, Guayaquil, Ecuador (e-mail: [email protected]).
focus on the restricted problem of measuring the angle of
rotation of a body respect to one axis parallel to the earth
surface.
There are two common sensors used to measure this
orientation: accelerometers, and gyroscopes. One way of
doing this is to use an accelerometer to find the gravity
components, then the angle is calculated using an inverse
tangent function. Other form is to use a gyroscope to measure
the angular speed, and the angle is simply this angular speed
accumulated over the time.
Both techniques have their drawbacks. The accelerometer
does not measure only the gravity components. It also
measures every small acceleration in each axis, so its signals
are usually noisy. On the other hand, the gyroscope is less
noisy but the accumulation of the angular speed over the time
also causes an accumulation of the noise, producing a bias in
the angle signal.
To overcome these problems two popular techniques of
sensor fusion are usually used: Complementary filters and
Kalman filters [2] [4].
A complementary filter is employed because it is very
practical, and has low computational complexity. It is a
weighted sum of the gyro and accelerometer data:
𝜃𝑘+1 = 𝑎(𝜃𝑘 + 𝜔𝑘) + (1 − 𝑎)𝑧𝑘 (1)
𝑧𝑘 = arctan(𝑎𝑚𝑡𝑘/𝑎𝑚𝑟𝑘
)
𝑎: Adjustable parameter between 0 and 1.
𝑧𝑘: Measured angle at the kth instant.
𝑎𝑚𝑡𝑘: Measured tangential acceleration at the kth instant.
𝑎𝑚𝑟𝑘: Measured radial acceleration at the kth instant.
𝜃𝑘: Angle of rotation at the kth instant.
𝜔𝑘: Angular velocity at the kth instant.
Also, it is typically preferred a Linear Kalman filter [2]
using the following constant gyro bias model:
𝜃𝑘+1 = 𝜃𝑘 + (𝑏𝑘 +𝜔𝑘) (2)
𝑏𝑘+1 = 𝑏𝑘
𝑏𝑘: Gyroscope bias at the kth instant.
Both filters are simple to implement and do not depend on
physical parameters.
This paper presents a Dual Extended Kalman Filter [1]
algorithm designed for tilt estimation. The algorithm relies
principally on the gyroscope measures that are less noisy than
accelerometer signals. This model does not depend on
I
Proceedings of the World Congress on Engineering 2017 Vol I WCE 2017, July 5-7, 2017, London, U.K.
ISBN: 978-988-14047-4-9 ISSN: 2078-0958 (Print); ISSN: 2078-0966 (Online)
WCE 2017

physical parameters, does not use the arctangent function and
it was designed and tested using MATLAB software.
II. MATHEMATICAL MODEL
As mentioned in the introduction, this model greatly relies
on the angular speed measured with the gyroscope. Ideally,
the measured angle is simply the accumulated angular speed
over the time. If the sampling time is one, the equation is:
𝜃𝑘+1 = 𝜃𝑘 +𝜔𝑘 (3)
𝜃𝑘: Measured angle at the kth instant.
𝜔𝑘: Angular velocity at the kth instant.
To improve the model, additional information is obtained
from the accelerometer. The accelerometer measures the
gravity and the acceleration at the same time. This is
represented as:
𝑎𝑚𝑡𝑘= 𝑎𝑡𝑘 + 𝑔𝑐𝑜𝑠(𝜃𝑘) (4)
𝑎𝑚𝑟𝑘= 𝑎𝑟𝑘 + 𝑔𝑠𝑖𝑛(𝜃𝑘)
𝑎𝑡𝑘: Tangential acceleration at the kth instant.
𝑎𝑟𝑘: Radial acceleration at the kth instant.
𝑎𝑚𝑡𝑘: Measured tangential acceleration at the kth instant.
𝑎𝑚𝑟𝑘: Measured radial acceleration at the kth instant.
𝑔: Local gravity.
The tangential and radial acceleration are:
𝑎𝑡𝑘 = 𝑟𝛼𝑘 + 𝑎𝑡𝑘𝑐𝑚 (5)
𝑎𝑚𝑟𝑘= −𝑟𝜔𝑘
2 + 𝑎𝑟𝑘𝑐𝑚 (6)
𝛼𝑘: Angular acceleration respect to the center of curvature
at the kth instant.
𝑟: Radius of curvature.
𝑎𝑡𝑘𝑐𝑚 : Tangential acceleration of the center of mass
relative to an inertial frame.
𝑎𝑟𝑘𝑐𝑚: Radial acceleration of the center of mass relative to
an inertial frame.
The terms 𝑎𝑡𝑘𝑐𝑚 and 𝑎𝑟𝑘𝑐𝑚 can be used to give additional
information to the system. For example, if it is plausible, an
additional accelerometer can be placed in the center of mass.
On this work, a null acceleration model is used for the center
of mass. Thus, the center of mass is the inertial frame.
The radius of curvature is a parameter needed for the
implementation. In specific applications, this parameter can
be measured directly, but for generality and practicability of
the filter, it is assumed unknown. As there is not much
information about this parameter, therefore a simple model is
used:
𝑟𝑘+1 = 𝑟𝑘 (7)
Even though the radius is assumed to be constant, the
appropriate tuning of the Kalman filter will allow this
estimated value to change over the time.
Thus, the complete model is:
𝜃𝑘+1 = 𝜃𝑘 +𝜔𝑘 (8)
𝑟𝑘+1 = 𝑟𝑘
𝑧𝑘 = ℎ(𝑟𝑘 , 𝜃𝑘 , 𝛼𝑘, 𝜔𝑘) = (𝑟𝑘𝛼𝑘 +𝑔𝑐𝑜𝑠(𝜃𝑘)
−𝑟𝑘𝜔𝑘2 +𝑔𝑠𝑖𝑛(𝜃𝑘)
)
𝛼𝑘: Angular acceleration at the kth instant.
𝑟𝑘: Radius of curvature.
𝑔: Local gravity.
𝜃𝑘: Angle of rotation at the kth instant.
𝜔𝑘: Angular velocity at the kth instant.
𝑧𝑘: Observation vector
III. Kalman Filter
The algorithm for the implementation is a Dual Extended
Kalman Filter [1] (DEKF). A linear Kalman filter [2] and an
extended Kalman filter are executed at the same time, for the
radius estimation and angle estimation respectively. The
Kalman equations are:
Prediction:
�̂�𝑘|𝑘−1 = �̂�𝑘−1|𝑘−1 +𝜔𝑘 (9)
𝑃𝜃𝑘|𝑘−1 = 𝑃𝜃𝑘−1|𝑘−1 + 𝑄𝜃𝑘
�̂�𝑘|𝑘−1 = �̂�𝑘−1|𝑘−1
𝑃𝑟𝑘|𝑘−1 = 𝑃𝑟𝑘−1|𝑘−1 + 𝑄𝑟𝑘
Update:
𝑌𝑘 = 𝑧𝑘 − ℎ(�̂�𝑘|𝑘−1, 𝜃𝑘|𝑘−1, 𝛼𝑘, 𝜔𝑘) (10)
𝐾𝜃𝑘 = 𝑃𝜃𝑘|𝑘−1𝐻𝜃𝑘𝑇 (𝐻𝜃𝑘
𝑃𝜃𝑘|𝑘−1𝐻𝜃𝑘𝑇 + 𝑅𝑘)
−1
(11)
𝜃𝑘|𝑘 = 𝜃𝑘|𝑘−1 + 𝐾𝑘𝑌𝑘 (12) 𝑃𝜃𝑘|𝑘 = (𝐼 − 𝐾𝜃𝑘𝐻𝜃𝑘
)𝑃𝜃𝑘|𝑘−1 (13)
𝐾𝑟𝑘 = 𝑃𝑟𝑘|𝑘−1𝐻𝑟𝑘𝑇(𝐻𝑟𝑘𝑃𝑟𝑘|𝑘−1𝐻𝑟𝑘
𝑇 +𝑅𝑘)−1
(14)
�̂�𝑘|𝑘 = �̂�𝑘|𝑘−1 + 𝐾𝑘𝑌𝑘 (15)
𝑃𝜃𝑘|𝑘 = (𝐼 − 𝐾𝑟𝑘𝐻𝑟𝑘)𝑃𝑟𝑘|𝑘−1 (16)
The observation model matrix H, for each state variable is
the gradient of ℎ, which is the observation model function.
𝐻𝑟𝑘 = (𝛼𝑘−𝜔𝑘
2)
For the angle, the gradient matrix is:
𝐻𝜃𝑘= (
−𝑔𝑠𝑖𝑛(�̂�𝑘|𝑘−1)
𝑔𝑐𝑜𝑠(�̂�𝑘|𝑘−1))
The vector 𝑧𝑘 is the pair of measured accelerations:
𝑧𝑘 = (𝑎𝑚𝑡𝑘𝑎𝑚𝑟𝑘
)
Finally, notice that matrix 𝑅𝑘 is symmetric because signals
are real, and Q matrices are simply real numbers:
𝑅𝑘 ∈ 𝑆2𝑥2
𝑄𝜃𝑘, 𝑄𝑟𝑘
∈ ℝ
Proceedings of the World Congress on Engineering 2017 Vol I WCE 2017, July 5-7, 2017, London, U.K.
ISBN: 978-988-14047-4-9 ISSN: 2078-0958 (Print); ISSN: 2078-0966 (Online)
WCE 2017
These equations can be implemented in an IDE that handle
matrices, like MATLAB. However, the idea is to obtain one-
dimensional equations that could be easily implemented in a
microcontroller. To simplify the problem, it was assumed that
the observation noise is uncorrelated. This means the matrix
𝑅𝑘is diagonal.
Notice that the prediction equations (9) are one-
dimensional equations and (10) can be write as two simple
one-dimensional equations.
Now, to compute the gain matrix 𝐾𝜃𝑘 it is needed to
calculate a determinant result of the inverse in equation (11),
the equation is:
(17)
𝑑𝑒𝑡𝜃 = 𝑔2𝑝𝜃𝑘|𝑘−1((𝑟11 − 𝑟22) 𝑐𝑜𝑠2 (𝜃𝑘|𝑘−1) + 𝑟22) + 𝑟11𝑟22
Then, the two components of the matrix 𝐾𝜃𝑘 can be
obtained using equation (11), these are:
𝐾𝜃1𝑘 = −𝑔𝑝𝜃𝑘|𝑘−1 𝑠𝑖𝑛(�̂�𝑘|𝑘−1)𝑟22
𝑑𝑒𝑡𝜃 (18)
𝐾𝜃2𝑘 =𝑔𝑝𝜃𝑘|𝑘−1𝑐𝑜𝑠(�̂�𝑘|𝑘−1)𝑟11
𝑑𝑒𝑡𝜃 (19)
To compute the equations (12) and (13) it is needed to do
some matrix algebra, the reduced expressions are:
𝜃𝑘|𝑘 = 𝜃𝑘|𝑘−1 + 𝐾𝜃1𝑘𝑌𝑘1 + 𝐾𝜃2𝑘𝑌𝑘2 (20)
𝑝𝜃𝑘|𝑘 = 𝑝𝜃𝑘|𝑘−1(𝑔𝐾𝜃1𝑘𝑠𝑖𝑛(𝜃𝑘) − 𝑔𝐾𝜃2𝑘𝑐𝑜𝑠(𝜃𝑘) + 1) (21)
In the same way, the equations for the radius are:
𝑑𝑒𝑡𝑟 = 𝑝𝑟𝑘|𝑘−1𝑟11𝜔𝑘4 + 𝑝𝑟𝑘|𝑘−1𝑟22𝛼𝑘
2 + 𝑟11𝑟22 (22)
𝐾𝑟1𝑘 =𝛼𝑘𝑝𝑟𝑘|𝑘−1𝑟22
𝑑𝑒𝑡𝑟 (23)
𝐾𝑟2𝑘 = −𝜔𝑘2𝑝𝑟𝑘|𝑘−1𝑟11
𝑑𝑒𝑡𝑟 (24)
�̂�𝑘|𝑘 = �̂�𝑘|𝑘−1 + 𝐾𝑟1𝑘𝑌𝑘1 + 𝐾𝑟2𝑘𝑌𝑘2 (25)
𝑝𝑟𝑘|𝑘 = 𝑝𝑟𝑘|𝑘−1(−𝐾𝑟1𝑘𝛼𝑘 + 𝐾𝑟2𝑘𝜔𝑘2 + 1) (26)
Once these equations are obtained, it is needed to define the
values of the covariance matrices 𝑅𝑘,𝑄𝜃𝑘and 𝑄𝑟𝑘
.There is no
standard method to obtain these matrices. On this
implementation, they were tuned manually by trial and error.
IV. IMPLEMENTATION AND RESULTS
For implementation, the MPU-6050 [3] was employed.
This is a popular device among hobbyist. It is a MEMS
accelerometer and a MEMS gyro in a single chip. For this
implementation, both sensors were sampled each 50 ms.
The algorithm was tested using a MATLAB script. The
equations implemented were the one-dimensional prediction
equations (9), equation (10) and (17) to (26). Matrices Q and
R obtained after the tuning are:
𝑅𝑘 = (250 00 250
)
𝑄𝜃𝑘 = 0.000021
𝑄𝑟𝑘= 20
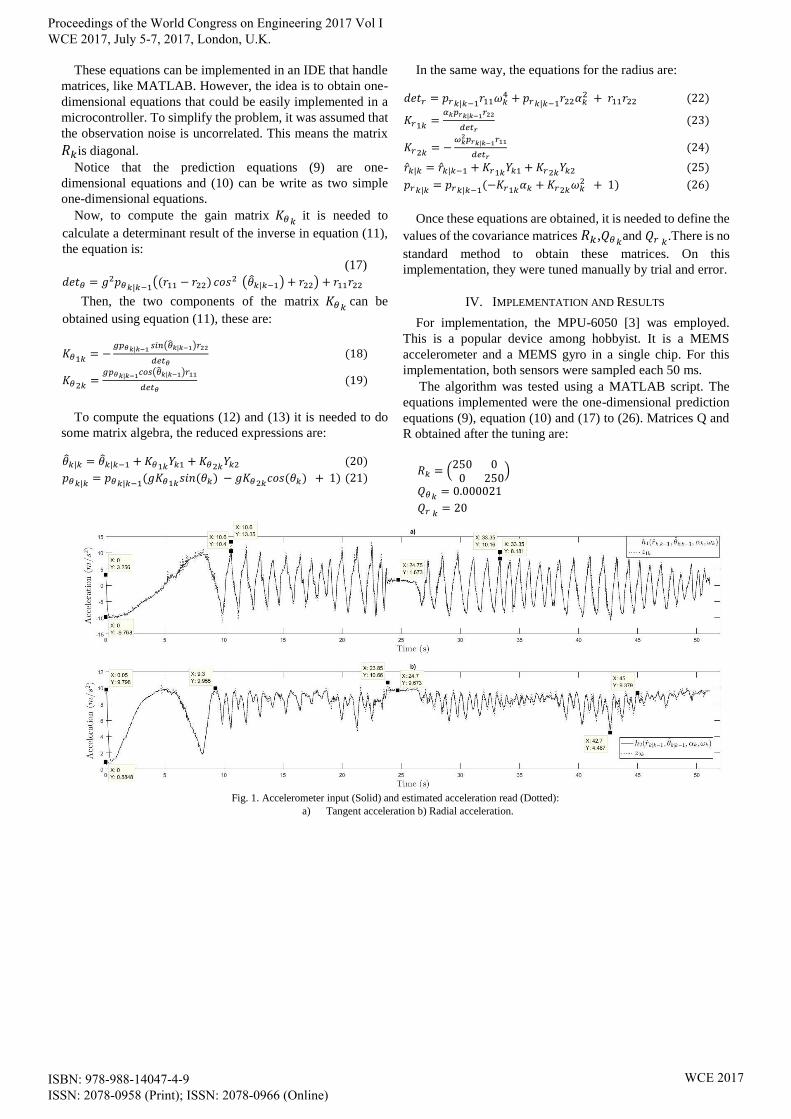
Fig. 1. Accelerometer input (Solid) and estimated acceleration read (Dotted):
a) Tangent acceleration b) Radial acceleration.
Proceedings of the World Congress on Engineering 2017 Vol I WCE 2017, July 5-7, 2017, London, U.K.
ISBN: 978-988-14047-4-9 ISSN: 2078-0958 (Print); ISSN: 2078-0966 (Online)
WCE 2017

Fig. 2. Gain matrix elements for the estimated radius.
a) First component. b) Second component.
Fig. 3. Gain matrix elements for the estimated angle.
a) First component. b) Second component.
Fig. 4. Tilt angle measure using directly the Gyroscope reading, the Accelerometer reading, and the estimation using DEKF
An adequate tuning allows the predicted signals to follow
the sensor signal. This is shown in Figure 1. The estimated
signal does not have the same initial value than the read
signals, but after approximately 0.5 seconds the filter
converges, and both signals are approximately equal.
Notice, that while the filter output converged after 0.5
seconds, the gain matrices did not converge. The gain matrix
𝐾𝑟𝑘for the radius is shown in the Figure 2, and the gain matrix
𝐾𝜃𝑘 for the angle is shown in the Figure 3. The elements of
these matrices do not converge to any value, rather they are
always being self-adjusted during the whole simulation.
The angle estimated by the filter is shown in Figure 4, and
it is compared with the angle calculated integrating the gyro
Proceedings of the World Congress on Engineering 2017 Vol I WCE 2017, July 5-7, 2017, London, U.K.
ISBN: 978-988-14047-4-9 ISSN: 2078-0958 (Print); ISSN: 2078-0966 (Online)
WCE 2017
signal, and with the angle calculated with the data acquired
from the accelerometer.
The estimated radius is shown in Figure 5, as mentioned
before, this signal is not constant even though a constant
model was assumed.
V. CONCLUSIONS
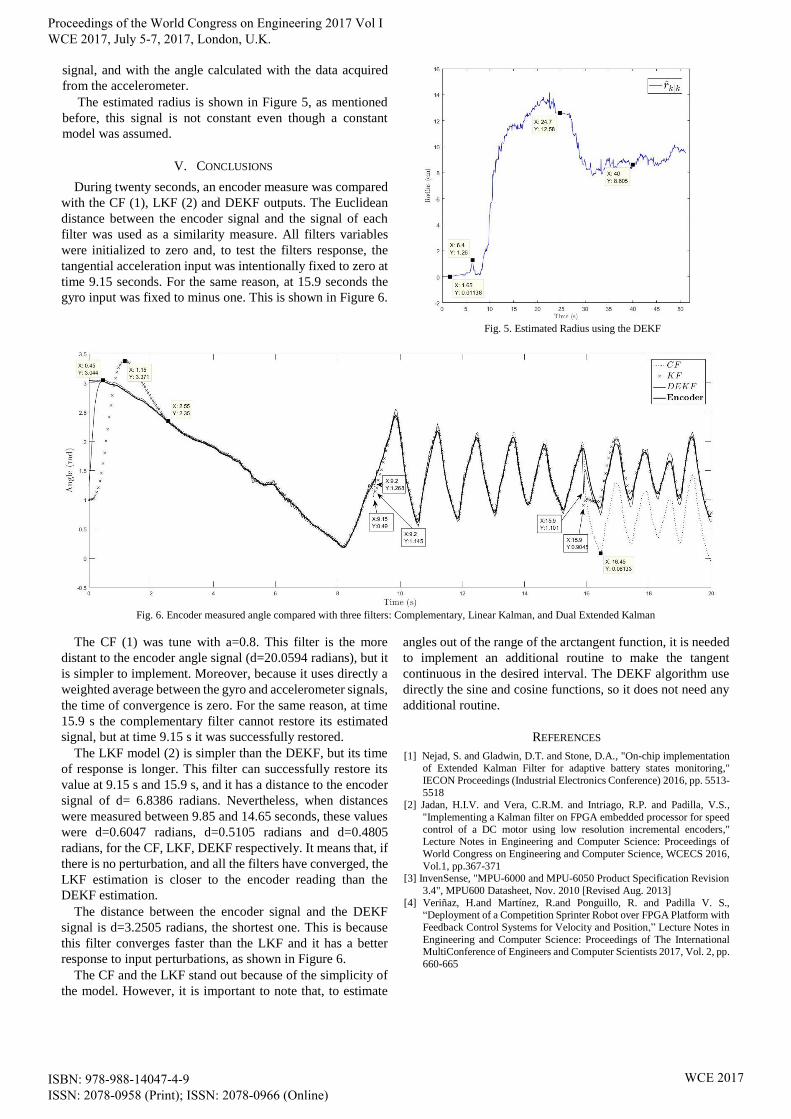
During twenty seconds, an encoder measure was compared
with the CF (1), LKF (2) and DEKF outputs. The Euclidean
distance between the encoder signal and the signal of each
filter was used as a similarity measure. All filters variables
were initialized to zero and, to test the filters response, the
tangential acceleration input was intentionally fixed to zero at
time 9.15 seconds. For the same reason, at 15.9 seconds the
gyro input was fixed to minus one. This is shown in Figure 6.
Fig. 5. Estimated Radius using the DEKF
Fig. 6. Encoder measured angle compared with three filters: Complementary, Linear Kalman, and Dual Extended Kalman
The CF (1) was tune with a=0.8. This filter is the more
distant to the encoder angle signal (d=20.0594 radians), but it
is simpler to implement. Moreover, because it uses directly a
weighted average between the gyro and accelerometer signals,
the time of convergence is zero. For the same reason, at time
15.9 s the complementary filter cannot restore its estimated
signal, but at time 9.15 s it was successfully restored.
The LKF model (2) is simpler than the DEKF, but its time
of response is longer. This filter can successfully restore its
value at 9.15 s and 15.9 s, and it has a distance to the encoder
signal of d= 6.8386 radians. Nevertheless, when distances
were measured between 9.85 and 14.65 seconds, these values
were d=0.6047 radians, d=0.5105 radians and d=0.4805
radians, for the CF, LKF, DEKF respectively. It means that, if
there is no perturbation, and all the filters have converged, the
LKF estimation is closer to the encoder reading than the
DEKF estimation.
The distance between the encoder signal and the DEKF
signal is d=3.2505 radians, the shortest one. This is because
this filter converges faster than the LKF and it has a better
response to input perturbations, as shown in Figure 6.
The CF and the LKF stand out because of the simplicity of
the model. However, it is important to note that, to estimate
angles out of the range of the arctangent function, it is needed
to implement an additional routine to make the tangent
continuous in the desired interval. The DEKF algorithm use
directly the sine and cosine functions, so it does not need any
additional routine.
REFERENCES
[1] Nejad, S. and Gladwin, D.T. and Stone, D.A., "On-chip implementation of Extended Kalman Filter for adaptive battery states monitoring,"
IECON Proceedings (Industrial Electronics Conference) 2016, pp. 5513-
5518 [2] Jadan, H.I.V. and Vera, C.R.M. and Intriago, R.P. and Padilla, V.S.,
"Implementing a Kalman filter on FPGA embedded processor for speed
control of a DC motor using low resolution incremental encoders," Lecture Notes in Engineering and Computer Science: Proceedings of
World Congress on Engineering and Computer Science, WCECS 2016,
Vol.1, pp.367-371 [3] InvenSense, "MPU-6000 and MPU-6050 Product Specification Revision
3.4", MPU600 Datasheet, Nov. 2010 [Revised Aug. 2013]
[4] Veriñaz, H.and Martínez, R.and Ponguillo, R. and Padilla V. S., “Deployment of a Competition Sprinter Robot over FPGA Platform with
Feedback Control Systems for Velocity and Position,” Lecture Notes in
Engineering and Computer Science: Proceedings of The International MultiConference of Engineers and Computer Scientists 2017, Vol. 2, pp.
660-665
Proceedings of the World Congress on Engineering 2017 Vol I WCE 2017, July 5-7, 2017, London, U.K.
ISBN: 978-988-14047-4-9 ISSN: 2078-0958 (Print); ISSN: 2078-0966 (Online)
WCE 2017