$ffhohudwlrqvplwqlqjdu rfk ghvv dqylqgqlqj l...
TRANSCRIPT

INOMEXAMENSARBETE TEKNIK,GRUNDNIVÅ, 15 HP
,
Accelerationsmätningar och dess användning i hållfasthetsproblem
FREDRIK RANOW
ERIK SANDBERG
KTHSKOLAN FÖR INDUSTRIELL TEKNIK OCH MANAGEMENT


INDEGREE PROJECT TECHNOLOGY,FIRST CYCLE, 15 CREDITS
,
Usage of acceleration measurements in material mechanics
FREDRIK RANOW
ERIK SANDBERG
KTH ROYAL INSTITUTE OF TECHNOLOGYSCHOOL OF INDUSTRIAL ENGINEERING AND MANAGEMENT


Sammanfattning
Projektet utreder hur man kan utföra mätningar med en modern mobiltelefon inom hållfasthetslära. Även problem som faller inom mekanikens domän undersöks. För att erhålla mätvärden utnyttjas de inbyggda accelerometrar som finns i alla moderna telefonenheter.
Ett antal experiment utförs för att illustrera dessa inbyggda accelerometrars svaghet och styrka. Dessa visar exempelvis hur man bestämmer styvheten hos bagagestroppar och träbjälkar, samt hur man hittar egenfrekvenser i strukturer.
Projektets resultat visar att mobiltelefoner kan användas för dessa ändamål.
Abstract
The aim of this project is to investigate accelerometer readings obtained from a modern smartphone, for use within the discipline of material mechanics. Problems that fall within the domain of classical mechanics are addressed as well. To obtain data, the smartphone’s integrated accelerometer is used. All modern smartphones contain these devices. When conducting experiments, data files are created which are then transferred to a computer for analysis.
A series of experiments were conducted. The equipment for each experiment was chosen specifically for being common in households. The acceleration may be used directly for determining force, for obtaining velocity and displacement upon integration, and for calculating stiffness of systems. Frequency analysis of the acceleration was carried out to find the natural frequencies of structures.
The results of these experiments are promising. The accelerometer is well suited for use within these disciplines.

Innehållsförteckning
1. Inledning ................................................................................................................................................... 1
2. Metod ........................................................................................................................................................ 2
2.1 Experiment 1 - Enaxlig förskjutning .................................................................................................... 2
2.2 Experiment 2 - Beräkning av friktionskraft ......................................................................................... 3
2.3 Experiment 3 - Beräkning av fjäderkonstant ...................................................................................... 3
2.4 Experiment 4 - Beräkning av böjstyvhet ............................................................................................. 4
2.5 Experiment 5 - Beräkning av egenfrekvenser hos brygga .................................................................. 4
3. Resultat ..................................................................................................................................................... 5
3.1 Resultat Experiment 1 - Enaxlig förskjutning ...................................................................................... 5
3.2 Resultat Experiment 2 - Beräkning av friktionskraft ........................................................................... 7
3.3 Resultat Experiment 3 - Beräkning av fjäderkonstant ........................................................................ 9
3.4 Resultat Experiment 4 - Beräkning av böjstyvhet ............................................................................. 10
3.5 Resultat Experiment 5 - Beräkning av egenfrekvenser hos brygga .................................................. 11
4. Slutsats .................................................................................................................................................... 13
Referenser ................................................................................................................................................... 13
1
1. Inledning
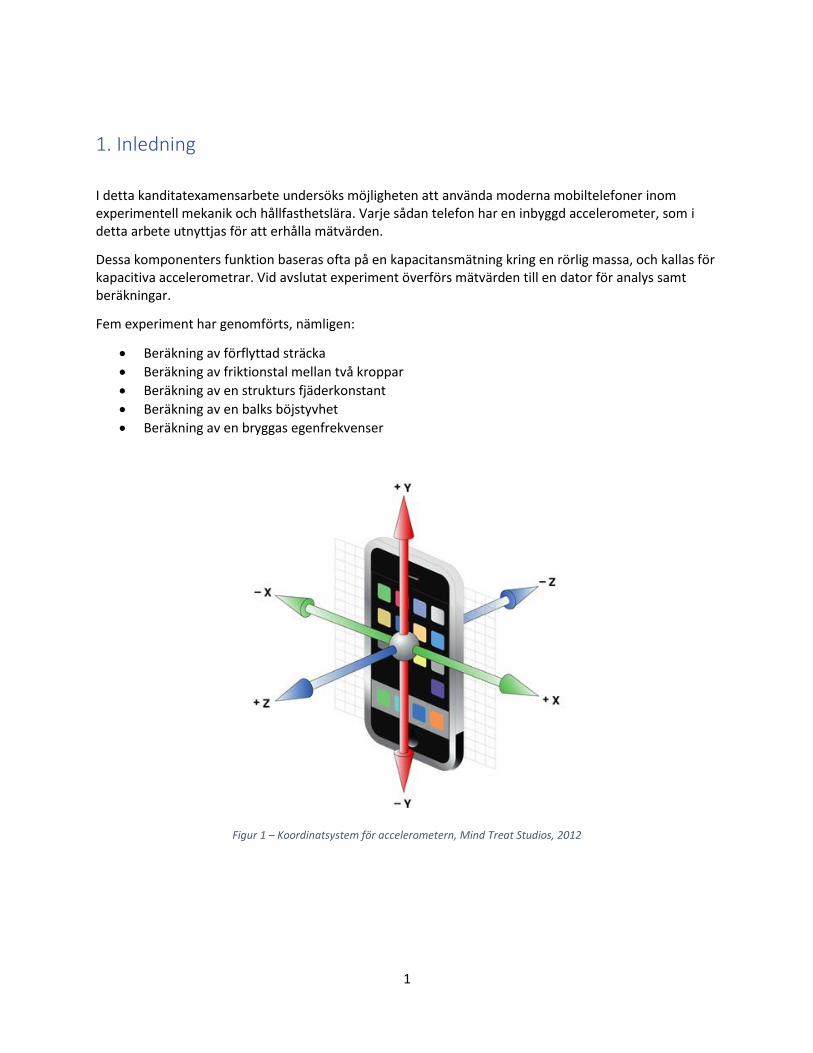
I detta kanditatexamensarbete undersöks möjligheten att använda moderna mobiltelefoner inom experimentell mekanik och hållfasthetslära. Varje sådan telefon har en inbyggd accelerometer, som i detta arbete utnyttjas för att erhålla mätvärden.
Dessa komponenters funktion baseras ofta på en kapacitansmätning kring en rörlig massa, och kallas för kapacitiva accelerometrar. Vid avslutat experiment överförs mätvärden till en dator för analys samt beräkningar.
Fem experiment har genomförts, nämligen:
• Beräkning av förflyttad sträcka
• Beräkning av friktionstal mellan två kroppar
• Beräkning av en strukturs fjäderkonstant
• Beräkning av en balks böjstyvhet
• Beräkning av en bryggas egenfrekvenser
Figur 1 – Koordinatsystem för accelerometern, Mind Treat Studios, 2012
2
2. Metod
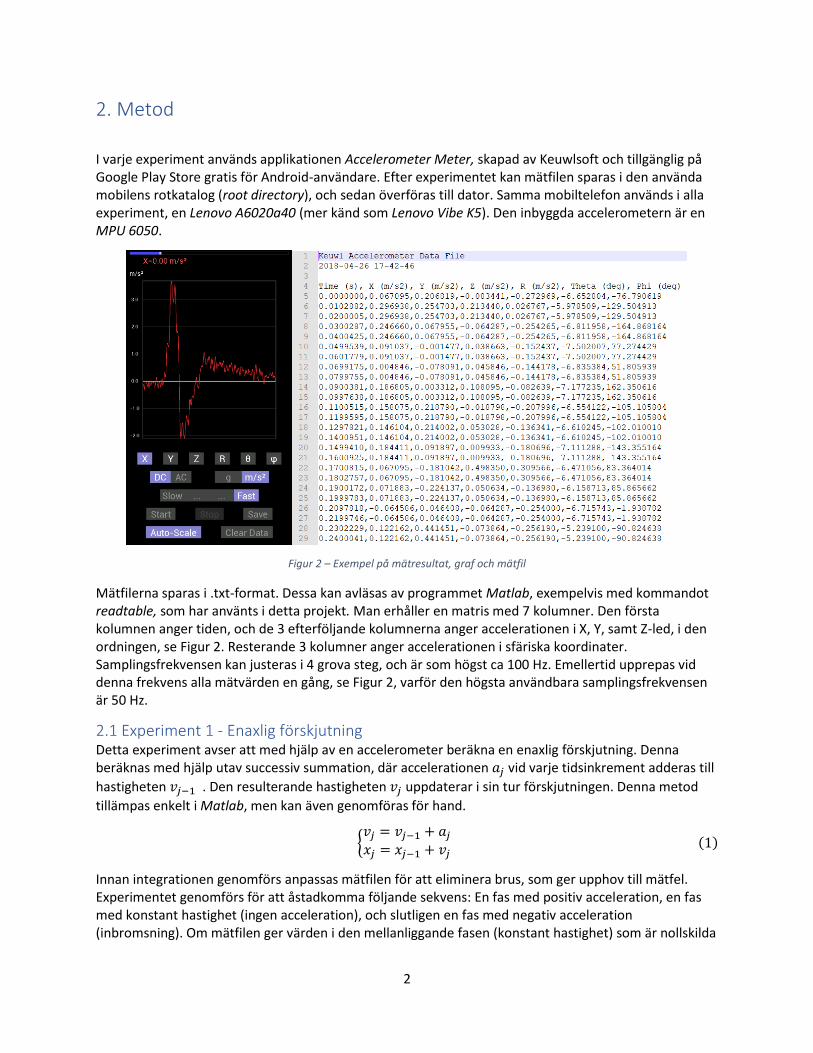
I varje experiment används applikationen Accelerometer Meter, skapad av Keuwlsoft och tillgänglig på Google Play Store gratis för Android-användare. Efter experimentet kan mätfilen sparas i den använda mobilens rotkatalog (root directory), och sedan överföras till dator. Samma mobiltelefon används i alla experiment, en Lenovo A6020a40 (mer känd som Lenovo Vibe K5). Den inbyggda accelerometern är en MPU 6050.
Figur 2 – Exempel på mätresultat, graf och mätfil
Mätfilerna sparas i .txt-format. Dessa kan avläsas av programmet Matlab, exempelvis med kommandot readtable, som har använts i detta projekt. Man erhåller en matris med 7 kolumner. Den första kolumnen anger tiden, och de 3 efterföljande kolumnerna anger accelerationen i X, Y, samt Z-led, i den ordningen, se Figur 2. Resterande 3 kolumner anger accelerationen i sfäriska koordinater. Samplingsfrekvensen kan justeras i 4 grova steg, och är som högst ca 100 Hz. Emellertid upprepas vid denna frekvens alla mätvärden en gång, se Figur 2, varför den högsta användbara samplingsfrekvensen är 50 Hz.
2.1 Experiment 1 - Enaxlig förskjutning Detta experiment avser att med hjälp av en accelerometer beräkna en enaxlig förskjutning. Denna beräknas med hjälp utav successiv summation, där accelerationen 𝑎𝑗 vid varje tidsinkrement adderas till
hastigheten 𝑣𝑗−1 . Den resulterande hastigheten 𝑣𝑗 uppdaterar i sin tur förskjutningen. Denna metod
tillämpas enkelt i Matlab, men kan även genomföras för hand.
{𝑣𝑗 = 𝑣𝑗−1 + 𝑎𝑗
𝑥𝑗 = 𝑥𝑗−1 + 𝑣𝑗 (1)
Innan integrationen genomförs anpassas mätfilen för att eliminera brus, som ger upphov till mätfel. Experimentet genomförs för att åstadkomma följande sekvens: En fas med positiv acceleration, en fas med konstant hastighet (ingen acceleration), och slutligen en fas med negativ acceleration (inbromsning). Om mätfilen ger värden i den mellanliggande fasen (konstant hastighet) som är nollskilda
3
så kan dessa värden anses vara oönskat brus. Även intervallen innan och efter accelerationskurvorna nollställs, och märkbara störningar inom dessa kurvor linjäriseras.
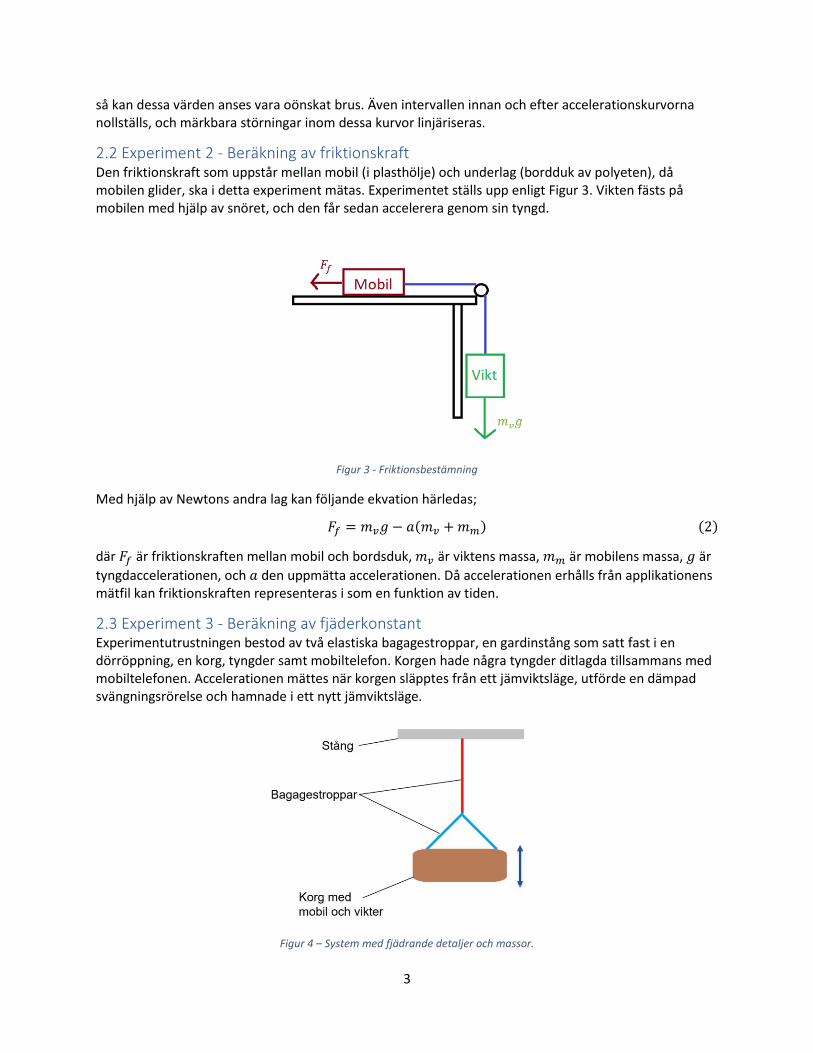
2.2 Experiment 2 - Beräkning av friktionskraft Den friktionskraft som uppstår mellan mobil (i plasthölje) och underlag (bordduk av polyeten), då mobilen glider, ska i detta experiment mätas. Experimentet ställs upp enligt Figur 3. Vikten fästs på mobilen med hjälp av snöret, och den får sedan accelerera genom sin tyngd.
Figur 3 - Friktionsbestämning
Med hjälp av Newtons andra lag kan följande ekvation härledas;
𝐹𝑓 = 𝑚𝑣𝑔 − 𝑎(𝑚𝑣 + 𝑚𝑚) (2)
där 𝐹𝑓 är friktionskraften mellan mobil och bordsduk, 𝑚𝑣 är viktens massa, 𝑚𝑚 är mobilens massa, 𝑔 är
tyngdaccelerationen, och 𝑎 den uppmätta accelerationen. Då accelerationen erhålls från applikationens mätfil kan friktionskraften representeras i som en funktion av tiden.
2.3 Experiment 3 - Beräkning av fjäderkonstant Experimentutrustningen bestod av två elastiska bagagestroppar, en gardinstång som satt fast i en dörröppning, en korg, tyngder samt mobiltelefon. Korgen hade några tyngder ditlagda tillsammans med mobiltelefonen. Accelerationen mättes när korgen släpptes från ett jämviktsläge, utförde en dämpad svängningsrörelse och hamnade i ett nytt jämviktsläge.
Figur 4 – System med fjädrande detaljer och massor.

4
Fjäderkonstanten k beräknas ur följande uttryck enligt [1];
𝑘 = 𝑚𝜔𝑛2 (3)
där 𝑚 är korgens massa, mobil och vikter inkluderat, och 𝜔𝑛 är systemets egenfrekvens. Beräkning av egenfrekvensen åstadkomms genom att erhålla perioden 𝑇 av svängningsrörelsen. Perioden beräknas genom att interpolera fram punkter där accelerationen är nollvärd. Egenfrekvensen kan då bestämmas enligt:
𝜔𝑑 =2𝜋
𝑇(4)
2.4 Experiment 4 - Beräkning av böjstyvhet
Figur 5 – Fritt upplagd träribba belastad av tyngd i sin mittpunkt
Detta experiment avser beräkna en balks böjstyvhet. En vikt hålls alldeles ovanför balken i outböjt tillstånd. Sedan släpps denna för att påbörja experimentet. Mobilen som används för att erhålla mätvärden vilar på vikten.
För att beräkna balkens böjstyvhet 𝐸𝐼 utnyttjas svängningsrörelsens egenfrekvens 𝜔, som erhålls från den erhållna accelerationen genom att beräkna perioden, som i Experiment 3.
(𝐸𝐼)𝜔 =𝜔2𝑚𝑙3
48(5)
2.5 Experiment 5 - Beräkning av egenfrekvenser hos brygga Detta experiment avser beräkna egenfrekvenser hos en brygga, som är konstruerad som en hängbro.
Denna brygga har ett flertal svängningsmoder. För att erhålla en acceleration exciterades bryggan, först i
horisontalled och sedan i vertikalled.
Eftersom dessa svängningar är påtvingade är det olämpligt att som i tidigare experiment bestämma
perioden för att sedan beräkna egenfrekvensen. Istället genomförs s.k. snabb fouriertransfrom (Fast
Fourier Transform, FFT, på engelska) för att isolera egenfrekvenserna.

5
Figur 6 - Bryggan som i experimentet sätts i svängning
3. Resultat 3.1 Resultat Experiment 1 - Enaxlig förskjutning
Figur 7 - Uppmätt acceleration
6
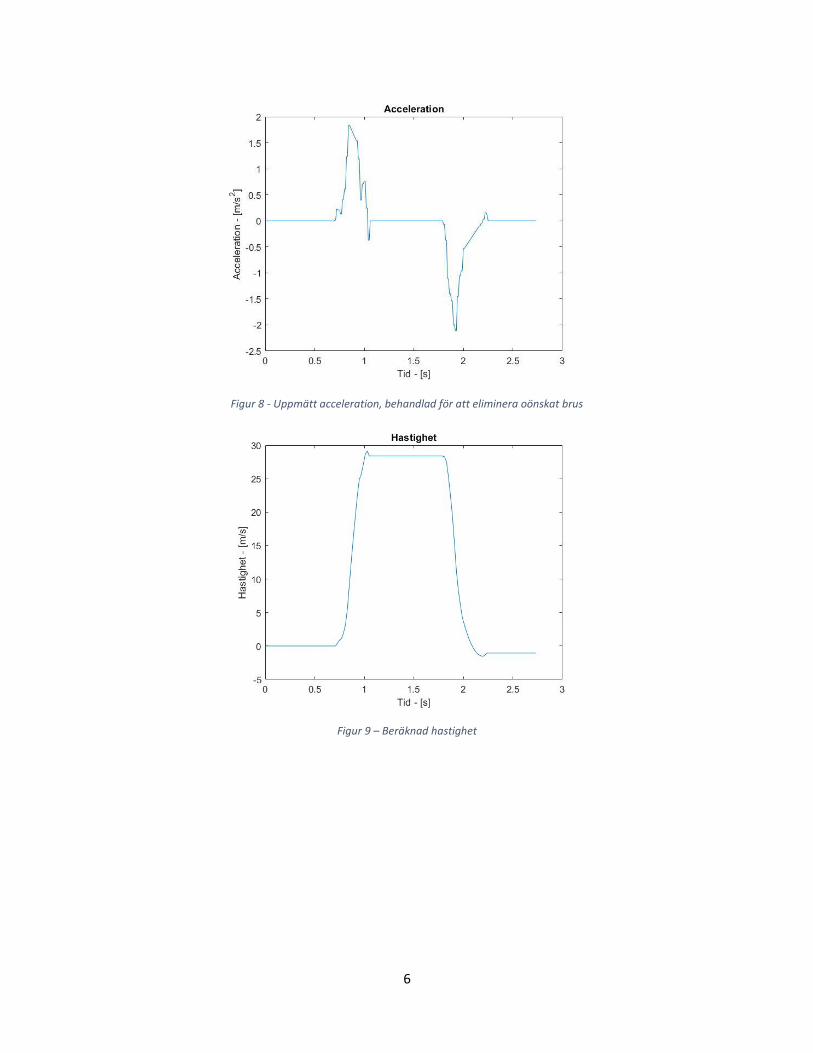
Figur 8 - Uppmätt acceleration, behandlad för att eliminera oönskat brus
Figur 9 – Beräknad hastighet
7
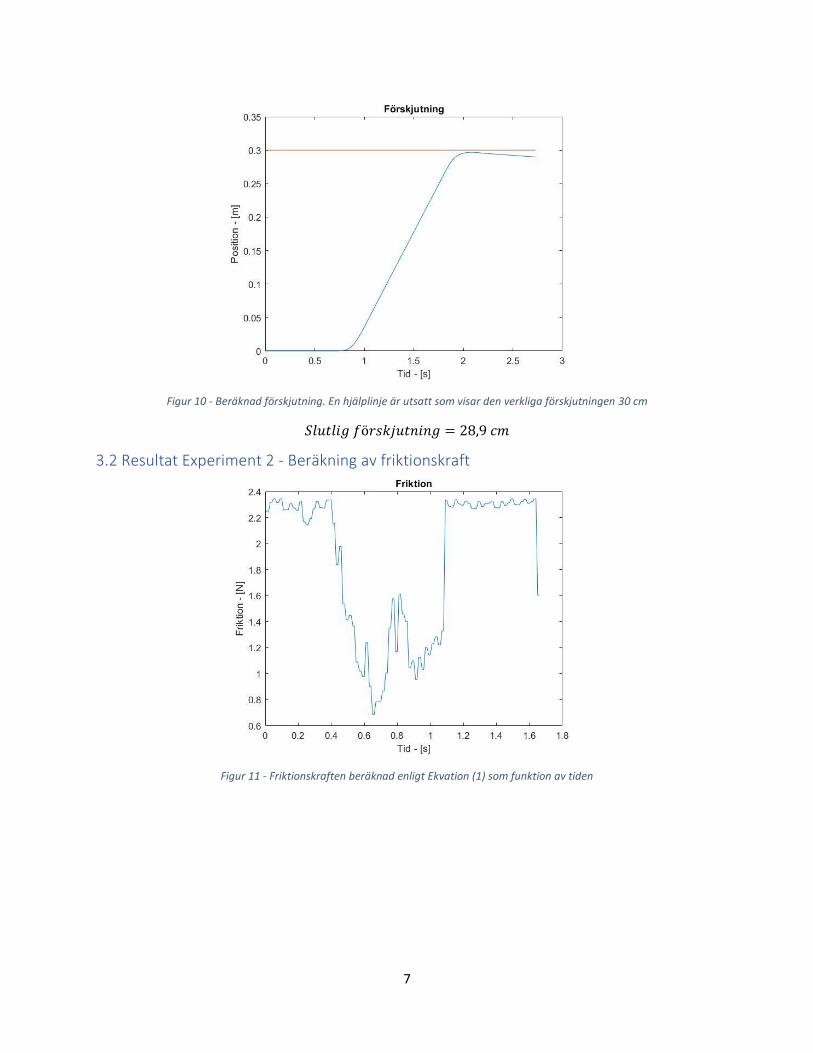
Figur 10 - Beräknad förskjutning. En hjälplinje är utsatt som visar den verkliga förskjutningen 30 cm
𝑆𝑙𝑢𝑡𝑙𝑖𝑔 𝑓ö𝑟𝑠𝑘𝑗𝑢𝑡𝑛𝑖𝑛𝑔 = 28,9 𝑐𝑚
3.2 Resultat Experiment 2 - Beräkning av friktionskraft
Figur 11 - Friktionskraften beräknad enligt Ekvation (1) som funktion av tiden

8
Figur 12 – Hastigheten som funktion av tiden
Figur 13 - Friktionskraften som funktion av tiden
Det är möjligt att beräkna friktionskoefficienten för olika hastigheter. Exempelvis erhålls att friktionskoefficienten mellan mobiltelefon och bordduk vid hastigheten 0,6 𝑚
𝑠⁄ är 0,44.
Bruset från accelerometern bidrar till ett visst fel i den beräknade friktionskraften. Från [2] erhålls
brusförhållandet (Power Spectral Density) 400𝜇𝑔
√𝐻𝑧. Detta ger att friktionskoefficienten (vid samma
hastighet som användes ovan) kan bestämmas med följande noggrannhet:
𝜇 = 0,44 ± 0,001

9
3.3 Resultat Experiment 3 - Beräkning av fjäderkonstant
Figur 14 - Uppmätt acceleration från Experiment 3
Medelvärdet av avstånd mellan nollställen till accelerationen (Figur 9) används för att räkna ut perioden 𝑇:
𝑇 = 0,793 ± 0,043 𝑠
Ett logaritmiskt dekrement är den naturliga logaritmen av kvoten mellan 2 maximala utslag åt samma håll, där det största utslaget är i täljaren vid en amplitudminskning.
I det här fallet har logaritmiska dekrementet 𝛿 räknats ut dels för största positiva accelerationerna efter cirka 3 och 3,75 sekunder och dels för största positiva accelerationerna efter cirka 3,75 och 4,5 sekunder.
Dämpningskonstanten räknades ut med en formel från [3];
𝜁 =
𝛿2𝜋
√1 + (𝛿
2𝜋)2
(6)
varpå egenvinkelfrekvensen enligt [1] blir:
𝜔𝑛 =𝜔𝑑
√1 − 𝜁2(7)
Fjäderkonstanten bestäms nu enligt Ekvation (3), (6), (7):
𝑘 = 86 ± 15 N
m

10
3.4 Resultat Experiment 4 - Beräkning av böjstyvhet
Figur 65 - Uppmätt acceleration från Experiment 4
𝐵ö𝑗𝑠𝑡𝑦𝑣ℎ𝑒𝑡 𝑏𝑒𝑟ä𝑘𝑛𝑎𝑑 𝑚𝑒𝑑 ℎ𝑗ä𝑙𝑝 𝑎𝑣 𝑒𝑔𝑒𝑛𝑓𝑟𝑒𝑘𝑣𝑒𝑛𝑠 = (𝐸𝐼)𝜔 = 172 𝑁𝑚2
Böjstyvheten har även bestämts i ett statiskt experiment genom att mäta nedböjningen under den
kända, belastande tyngden [4]. Då erhålls en böjstyvhet som är 181 𝑁𝑚2.
Som i Experiment 3 bestäms perioden 𝑇 med en viss felmarginal, då det är medelvärdet av en serie
beräknade perioder som används.
𝑇 = 0,512 ± 0,051 𝑠
Denna marginal ger i sin tur en osäkerhet för den beräknade böjstyvheten:
(𝐸𝐼)𝜔 = 172 ± 35 𝑁𝑚2

11
3.5 Resultat Experiment 5 - Beräkning av egenfrekvenser hos brygga
Figur 16 - Uppmätt acceleration då bryggan exciteras i horisontell riktning
Figur 17 - Uppmätt acceleration då bryggan exciteras i vertikal riktning
FFT fungerar bäst när antalet datapunkter är en tvåpotens (2𝑛). Mätfilerna från vartdera fallet har 405
respektive 506 datapunkter. Båda dessa beskärs till 256 datapunkter.

12
Figur 18 - Fouriertransform för svängning hos brygga i horisontalled
Figur 19 - Fouriertransform för svängning hos brygga i vertikalled
I horisontalled bestäms egenfrekvensen till 0,78 Hz. Svängningen i vertikalled ger upphov till något annorlunda beteende, där man utöver grundtonen 2,73 Hz (som är egenfrekvensen) även ser en överton.

13
4. Slutsats
Resultat från experiment visar att det är möjligt att använda moderna mobiltelefoner för att genomföra
experiment inom experimentell hållfasthetslära och mekanik.
Den inbyggda accelerometern är inte direkt avsedd för att användas inom dessa områden. Direkt
användning av accelerationen för att beräkna exempelvis förskjutningen kan ge förhållandevis låg
precision genom summation framräknade resultat i hastighet och förskjutning. Det är då lämpligt att
begränsa brusets inverkan som i Experiment 1. I Experiment 2 var brusproblemet inte lika stort eftersom
det var ett dynamiskt förlopp, där telefonen förflyttades under hela mätningen.
Arbetet visar även att det är möjligt att bestämma materialkonstanter såsom fjäderkonstanter och
böjstyvheter, genom att sätta system i svängning och sen bestämma egenfrekvenser. Det är även möjligt
att mäta på en struktur som kan svänga på mer komplicerade sätt, som bryggan i Experiment 5. Man kan
då bestämma strukturens egenfrekvenser.
Referenser 1. Nyberg, C. Mekanik Grundkurs (första upplagan). Stockholm. Liber; 2007. Formel (12.38), (12.25) 2. InvenSense (2013). MPU-6000 and MPU-6050 Product Specification Revision 3.4. [www]. Hämtat
från https://www.invensense.com/wp-content/uploads/2015/02/MPU-6000-Datasheet1.pdf. Publicerat 19 augusti 2013. Hämtat 13 juni 2018
3. MIT OpenCourseWare. 18.03 Differential Equations, Supplementary Notes Ch. 13 [www]. Hämtat från: https://ocw.mit.edu/courses/mathematics/18-03-differential-equations-spring-2010/readings/supp_notes/MIT18_03S10_chapter_13.pdf. Publicerat 2010. Hämtat 13 juni 2018
4. Alfredsson, B. (red.) Handbok och formelsamling i Hållfasthetslära. Institutionen för hållfasthetslära, KTH, Stockholm, 2014


www.kth.se