a voltage phasor based fault classification method for …staff.vbi.vt.edu/anam86/a voltage phasor...
TRANSCRIPT

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
1
Fenghua Gao1,*, James S. Thorp2, Shibin Gao1, Anamitra Pal2, and Katelynn A. Vance2
1Southwest Jiaotong University, Chengdu, P. R. China.
2Virginia Tech, Blacksburg, USA.
* Corresponding Author. Address: the Department of Electrical Engineering, Southwest Jiaotong University,
Chengdu, 610031, P. R. China. E-mail address: [email protected] (Fenghua Gao).
Abstract— This paper presents a fault classification method for transmission lines based on voltage
phasors using classification and regression trees (CART). The proposed method is intended to aid system
operators in understanding the outputs of a PMU only state estimator. Faults are classified into four
categories when the estimator is positive sequence and into ten categories when the estimator is three phase.
The fault data is generated in PowerWorld® and DSA Tools®. The pre-fault state consists of a variety of
operating conditions and loading angles of faulted lines. The fault condition comprises of different fault types,
fault locations, fault impedances, and fault incidence angles. The fault classification is done using MATLAB®.
The approach is successfully tested on the IEEE-118 bus system. The results demonstrate that the technique
developed here is effective and robust, irrespective of the pre-fault and fault conditions.
Keywords— Classification and Regression Tree (CART), Fault Classification, Fault Type, Fault Voltage,
Phasor Measurement Units (PMUs), State Estimation, Voltage Phasors.
1. INTRODUCTION
In recent years, state estimation [1] has played a key role in energy management systems (EMS), and it
has been extensively used to improve power system performance and reliability. The conventional state
estimator based on supervisory control and data acquisition (SCADA) system typically processes positive
sequence data every two seconds. The conventional state estimator is static because it is based on a data
A Voltage Phasor Based Fault Classification Method for
PMU Only State Estimator Output
This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
2
scan which assumes that the system does not change during the scan. It is also iterative because the
measurements of real and reactive power flows and injections are nonlinear functions of the system state
(bus voltages). Synchronized phasor measurement units (PMUs) [2] have been added to the conventional
state estimator [3], but the resulting hybrid estimators are also nonlinear and the static assumption is still
required. However, as more and more PMUs are installed in the power grid, a purely PMU based state
estimator becomes realistic. A PMU only state estimator is linear and non-iterative and can quickly track
the state of the power system. Therefore, it is potentially more accurate than the conventional state
estimator [4]. Since it is customary for PMUs to be placed on the high voltage buses, it is expected that a
PMU only state estimator will be limited to the high voltage network (345kV and above).
Fault classification for relays is an area in which much research has been conducted over the past few
decades [5]. Papers written on this topic have used methods ranging from fuzzy logic [6] and wavelet
transforms [7-8], to neural networks [9] and support vector machines (SVMs) [10]. The methodology
presented in this paper distinguishes fault types based on only the voltage phasor which is different from
traditional algorithms that required both voltages and currents. This paper is not intended for relaying
applications, but it seeks to aid the operator in understanding the new displays obtained from a PMU only
state estimator. Recently, the first three phase PMU-only state estimator has been developed for
Dominion Virginia Power (a utility of the US) and is currently in operation [4]. In this new estimator, the
operator will see the output once a second under normal conditions. The operator will also have the option
of pushing a button and seeing one second’s worth of data obtained at every cycle. As a consequence of
this fast sampling, faults, high speed recloses, and backup operations will be successfully captured by this
display. However, the problem that is faced by the operators using the outputs of this estimator is that the
array of complex voltages that it generates (corresponding to faults, high speed recloses, etc.) cannot be
distinguished visually. Since, a display at this time scale (one frame per cycle) will be new for the
operator, without proper explanation of this technology, the implementation and acceptance of PMU only
state estimators will be delayed. The aim of this paper is to address this concern by classifying faults
identified by PMU only state estimators using only the voltage phasor.

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
3
In this paper, two versions of the PMU only estimator are considered, namely, positive sequence state
estimator and three phase state estimator. Using voltage phasors obtained from these two estimators,
faults are classified into different types. The fault data is generated in PowerWorld® [11] and DSA Tools®
[12]. The pre-fault state consists of a variety of operating conditions and loading angles of faulted lines.
The faults are simulated on the high voltage lines with the fault condition comprising of different fault
types, fault locations, fault impedances, and fault incidence angles. Based on the fault data, a MATLAB®
[13] implementation is then created to perform the fault classification. The results show that the proposed
approach is an extremely accurate and highly robust method for fault classification, and that it is not
affected by the fault condition and the pre-fault state.
The rest of the paper is organized as follows: In Section 2, a model system is introduced that illustrates
how fault voltages can be obtained from PMUs. The analysis design for fault classification as well as the
different fault types is also explained in this section. Section 3 gives a basic background of CART [14]
and explains the logic that is followed for implementing the proposed algorithm. The results of the
positive sequence and three phase state estimator outputs for the test system (IEEE-118 bus system [15])
are summarized in Section 4. In Section 5, decision making using the proposed approach is compared
with two other algorithms – the first one considers only voltage magnitudes, while the second one
considers voltage magnitudes and angles separately. The comparison is done with respect to complexity,
precision, and error tolerance of inputs. The conclusion is provided in Section 6.
2. SYSTEM DESIGN FOR FAULT ANALYSIS
A. Model system
A four bus, three generator system is used to demonstrate fault analysis using only complex voltages.
The single line diagram of the system is given in Figure 1 [5]. The lines are designed to emulate 300 km,
345kV transmission lines (transposed) with PMUs installed at every bus. The lines are modeled as three
phase exact pi sections for the appropriate line length and voltage level. Figure 2 and 3 depict positive
sequence and three phase outputs (voltage phasors) obtained for a typical system state at fault condition.

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
4
Line 1
Line 2
G1
G2
G3Line 3
1
2
3
4
Figure 1. One-line diagram of four bus model system
Figure 2. Positive Sequence Voltage phasor at Bus 3 for b-g fault in Line 3
Figure 3. Three Phase Voltage phasor at Bus 3 for b-g fault in Line 3
-0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1100
150
200
250Magnitude for Voltage Phasor
Time (s)
Mag
nit
ude
(kV
)
-0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1120
125
130
135Angle for Voltage Phasor
Time (s)
An
gle
(deg
)
-0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1100
150
200
250Magnitude for Voltage Phasors
Time (s)
Mag
nit
ude
(kV
)
a
b
c
-0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1-200
-100
0
100
200Angle for Voltage Phasor
Time (s)
An
gle
(deg
)
a
b
c

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
5
When a phase b to ground (b-g) fault is applied at 40% of Line 3 with 30o fault incident angle and 1Ω
fault resistance, the positive sequence and three phase complex voltages measured at Bus 3 are depicted
in Figure 2 and Figure 3, respectively. It is clear that the positive sequence voltage (in Figure 2) and
Phase b voltage (in Figure 3) decrease rapidly when the fault occurs. Similarly, it can be inferred that
faults in other phase/s and line/s will be reflected in their corresponding voltage plots [16]. In the
following sub-sections, these complex voltages will be extracted and used to classify different types of
faults.
B. Analysis design
The complex voltages obtained as outputs of the PMU only state estimator are sampled as fast as once
per cycle. In this paper, it has been assumed that relays take at least 1 cycle to detect the fault, whereas the
breakers take at least 2 cycles to open after the relay has detected the fault. Therefore, the second and
third data samples will capture the steady state fault data. Now, there is a possibility that the fault might
not exactly coincide with the beginning of a cycle (it might occur at half-cycle, three quarters of a cycle,
etc.). Taking all this into account, it can be ascertained that the third voltage sample after the fault is the
best sample to be used as the steady state fault voltage.
The flow diagram of the fault analysis process is given in Figure 4. It starts with the outputs of a PMU
only state estimator. The outputs are the voltage phasors that are fed into the fault detector. The fault
detection algorithm is based on the dynamic state prediction method developed in [17]. If there is a fault,
the fault detector provides the voltage phasors of the terminal ends of the faulted line to the fault classifier
which then determines the fault type.
Fault detector
Fault classifier
PMU only state
estimator output
Voltage phasor
Fault type
Figure 4. The flow-process of fault analysis based on PMU only state estimator output

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
6
C. Fault classification types
For a positive sequence state estimator output, short circuit faults were classified into four types,
namely single-line to ground faults, line-to-line faults, double-line to ground faults, and three phase faults.
For a three phase state estimator, ten fault types are considered, namely single-line to ground faults on
Phase a, single-line to ground faults on Phase b, single-line to ground faults on Phase c, line-to-line faults
on Phase a and b, line-to-line faults on Phase b and c, line-to-line faults on Phase a and c, double-line to
ground faults on Phase a and b, double-line to ground faults on Phase b and c, double-line to ground faults
on Phase a and c, and three phase faults. CART has been used in this paper to identify the fault type. A
variety of fault conditions are simulated in PowerWorld® and DSA Tools® to generate the data. After
post-processing of the data, it is used as input to the MATLAB implementation of CART for decision
making. It is expected that the proposed technique will provide operators with a label for the plots that the
PMU only state estimator generates.
3. ALGORITHM SELECTION AND IMPLEMENTATION FOR FAULT CLASSIFICATION
A. Classification and regression tree (CART)
Decision tree is a machine-learning tool that extracts information from large sets of data and constructs
a prediction model based on the gained information. A classification and regression tree (CART) is a non-
parametric decision tree learning technique that intuitively represents the gained knowledge in the form of
if-else statements. It extracts a manageable number of core measures from the database which is then used
to classify the data. As illustrated in [18], decision trees are widely used in power systems, with CART
being the most popular tool because of its high precision and robustness. Typical examples of decision
tree applications are adaptive protection schemes [19], online monitoring schemes [20], transient stability
analysis [21], control analysis [22], etc. A commercial implementation of CART (CART®) has also been
developed by Salford Systems [23].
The objective of CART is to perform an optimal split for a given problem. The splitting variables
specify the required measurements while the structure of the tree determines how the new data will be

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
7
sorted. For classification purposes, CART takes all variables from the given data set and picks suitable
splitting variables for performing optimal splits. If 𝑝 is a list of attributes and 𝑑 denotes the splitting
variables that have been picked, then this logic can be referred to as “𝑝 chooses 𝑑” [24]. However,
synchrophasor data consists of complex numbers (complex voltages, currents, etc.). The traditional CART
algorithm considers the two components of a complex number (real and imaginary) separately and picks
one of them at a time for decision making. As demonstrated in [25], this may not always produce the most
optimal results. An algorithm called Fisher’s linear discriminant applied to synchrophasor data (FLDSD)
was developed in [25] for applying CART to high dimensional multivariate data. When two classes are
considered, FLDSD represents multi-dimensional data points by a one-dimensional variable. This
variable is the distance from an optimally selected hyperplane. When multiple classes are present, the
process is repeated by taking two classes at a time. If n denotes the number of classes, then the maximum
number of hyperplanes needed to split the data is given by (1).
Number of hyperplanes =n(n − 1)
2 (1)
It can be easily inferred that the number of variables produced is equal to the number of hyperplanes
formed. CART then picks those one-dimensional variables which are needed to perform an optimal split.
More details about CART and its operations can be found in [14], [23], and [26].
B. Algorithm implementation for fault classification
The voltage based fault classification method introduced in this paper has been analyzed and tested on
the IEEE-118 bus system [15]. PMUs are placed on the eleven 345kV buses to monitor the ten high-
voltage lines. The outputs are generated as fast as once per cycle. For each of the lines, four kinds of
faults are applied to generate positive sequence fault data, whereas ten kinds of faults are applied to
generate three phase fault data. For both the estimators, the fault voltage of the estimator output is chosen
as the input to train the fault classification tree. CART is used to pick the measurements to classify the
fault. The complex measurements (voltage magnitudes and angles) from the terminal ends of the lines are
set as inputs to CART for fault classification. This means that CART uses two magnitudes and two angles

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
8
for the positive sequence state estimator output, and six magnitudes and six angles for the three phase
state estimator output. Thus, the data points become four dimensional for the positive sequence state
estimator and twelve dimensional for the three phase state estimator. Since the input data to CART are
complex numbers, FLDSD is used to represent them as one-dimensional variables.
The MATLAB implementation of CART has been used in this paper to categorize the fault type.
Figure 5 depicts the tree-growing logic that was developed. The complex voltage measurements obtained
from PMUs are represented by one-dimensional distance variables. These distance variables then become
the inputs for CART. The training data is initially used to create a full and un-pruned classification tree.
Next, this tree is pruned to obtain the smallest tree (T) such that the error is within one standard deviation
of the minimum cost sub-tree. If the desired accuracy is obtained, then this tree is the final fault
classification tree. If the desired accuracy is not obtained, then the Tree T is pruned one level at a time to
obtain a family of possible classification trees with different tree sizes. The tree with the smallest number
of terminal nodes that satisfies the accuracy criterion is then selected to be the final fault classification
tree.
4. SIMULATION RESULTS
The total number of training cases for the positive sequence state estimator was 7,600, whereas it was
11,400 for the three phase state estimator. These cases were created by considering different fault
locations, fault impedances, and adding noise to voltage phasors in PowerWorld®. For the simulations,
fault locations ranged from 5% to 95% of the line in steps of 5%. Fault impedances were set at 0 and 10
Ohms for the positive sequence state estimator, and 0, 10, and 100 Ohms for the three phase state
estimator. The loading angles changed from -12° to 7° for different faulted lines. 1% fixed error was
introduced in the three phase PMU measurements. White noise of 1% was then added to all the
measurements. The cases with fault locations varying from 5% to 95% in steps of 10% were used to train
the trees while the remaining cases were used to test the trees.

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
9
Grow classification tree with maximum possible number of terminal nodes
Choose the tree (T) within one standard deviation error of the minimum cost sub-tree
Desired accuracy
obtained?
Prune the Tree (T) one level at a time to obtain a family of possible classification trees
Test performance of the family of trees and choose the smallest tree with desired accuracy
Final Fault Classification Tree
Yes
No
Set the distance variables as inputs to CART
Use FLDSD to compute one-dimensional distance variables from complex PMU measurements
Figure 5. Implementation of the proposed algorithm (in MATLAB®)
This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
10
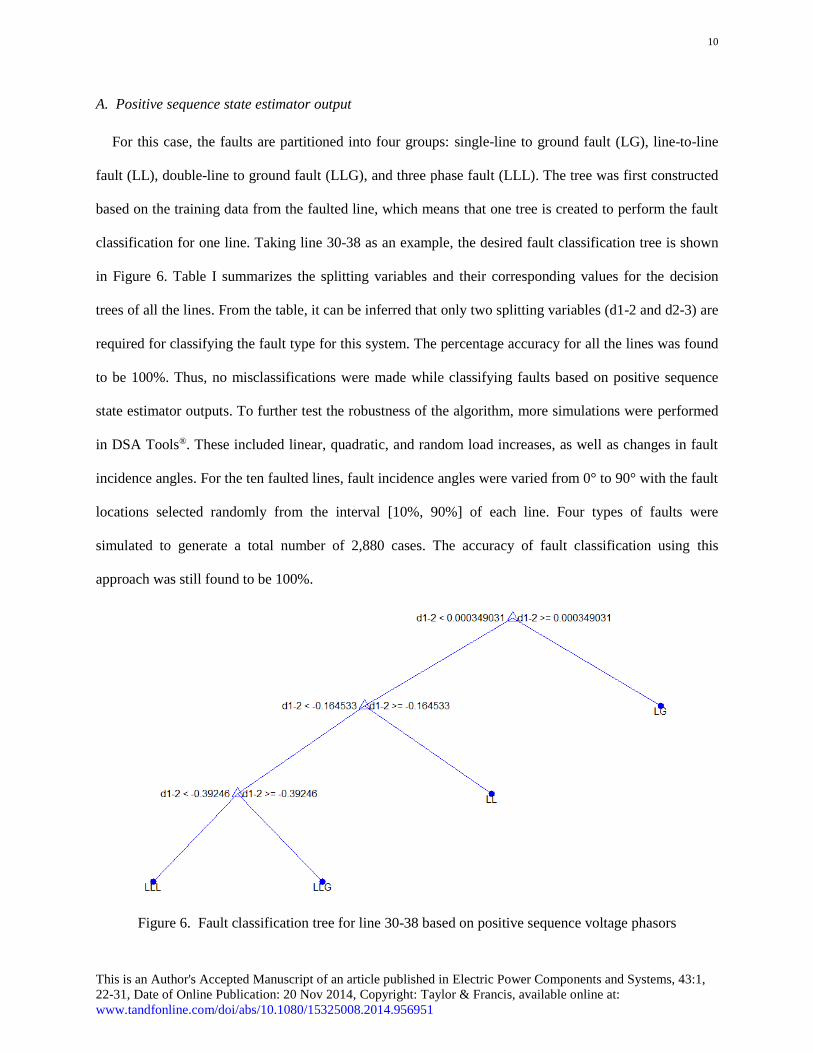
A. Positive sequence state estimator output
For this case, the faults are partitioned into four groups: single-line to ground fault (LG), line-to-line
fault (LL), double-line to ground fault (LLG), and three phase fault (LLL). The tree was first constructed
based on the training data from the faulted line, which means that one tree is created to perform the fault
classification for one line. Taking line 30-38 as an example, the desired fault classification tree is shown
in Figure 6. Table I summarizes the splitting variables and their corresponding values for the decision
trees of all the lines. From the table, it can be inferred that only two splitting variables (d1-2 and d2-3) are
required for classifying the fault type for this system. The percentage accuracy for all the lines was found
to be 100%. Thus, no misclassifications were made while classifying faults based on positive sequence
state estimator outputs. To further test the robustness of the algorithm, more simulations were performed
in DSA Tools®. These included linear, quadratic, and random load increases, as well as changes in fault
incidence angles. For the ten faulted lines, fault incidence angles were varied from 0° to 90° with the fault
locations selected randomly from the interval [10%, 90%] of each line. Four types of faults were
simulated to generate a total number of 2,880 cases. The accuracy of fault classification using this
approach was still found to be 100%.
Figure 6. Fault classification tree for line 30-38 based on positive sequence voltage phasors

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
11
TABLE I
SPLITTING VARIABLES AND THEIR VALUES FOR POSITIVE SEQUENCE STATE ESTIMATOR OUTPUT
Faulted
Line
S1 S2 S3
Splitting
Variable
Splitting
Value
Splitting
Variable
Splitting
Value
Splitting
Variable
Splitting
Value
8-9 d1-2 0.0007 d1-2 -0.1495 d1-2 -0.3632
8-30 d1-2 -0.0003 d1-2 -0.1448 d1-2 -0.3414
9-10 d1-2 0.0007 d1-2 -0.1817 d1-2 -0.4384
26-30 d1-2 -0.0005 d1-2 -0.0934 d1-2 -0.2099
30-38 d1-2 0.0003 d1-2 -0.1645 d1-2 -0.3925
38-65 d1-2 -0.0047 d2-3 -0.0028 d1-2 -0.1313
63-64 d1-2 0.0002 d1-2 -0.1677 d1-2 -0.3995
64-65 d1-2 -0.0013 d1-2 -0.1813 d1-2 -0.4252
65-68 d1-2 0.0005 d1-2 -0.1937 d1-2 -0.4601
68-81 d1-2 -0.0012 d1-2 -0.1668 d1-2 -0.3951
B. Three phase state estimator output
The three phase state estimator tracks all three phases and provides more detailed fault information
than the positive sequence state estimator output. Based on the fault voltage of three phase state estimator
output, the faults are classified into ten categories: single-line to ground faults on Phase a (LGa), single-
line to ground faults on Phase b (LGb), single-line to ground faults on Phase c (LGc), line-to-line faults
on Phase a and b (LLab), line-to-line faults on Phase b and c (LLbc), line-to-line faults on Phase a and c
(LLca), double-line to ground faults on Phase a and b (LLGab), double-line to ground faults on Phase b
and c (LLGbc), double-line to ground faults on Phase a and c (LLGca), and three phase faults (LLL). By
constructing one tree for all faulted lines, 45 hyperplanes are formed resulting in 45 distance variables

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
12
being set as inputs to CART. In accordance with the implementation of the proposed algorithm as
summarized in Section 3B, the smallest tree with ten terminal nodes is selected as the final fault
classification tree. This tree is presented in Figure 7. From the tree, it becomes clear that only 9
hyperplanes out of 45 are required to perform an optimal split. The percentage accuracy obtained by using
this tree is 100% for the training cases and 99.981% for the testing cases. In the case of an actual event,
the nine distances of the data points from the corresponding hyperplanes have to be computed. Once these
distances are known, by following the tree to the respective terminal node, the fault type can be identified.
Figure 7. Fault classification tree for all ten high voltage lines based on three phase voltage phasors
5. ALGORITHM COMPARISON
In this section the performance of the proposed algorithm is compared with two other algorithms. The
first algorithm uses only voltage magnitudes to perform fault classification [27], while the second
algorithm classifies faults by considering voltage magnitudes and angles separately (traditional CART
algorithm). In both the algorithms, the IEEE-118 bus system is used as the test system with one tree being
created for one line for the positive sequence state estimator output, while one tree is created for all the
lines for the three phase state estimator output. The following sub-sections summarize the results obtained.

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
13
A. Result comparison with the algorithm that considers only voltage magnitudes for fault classification
From Figures 2 and 3 one can hypothesize that the voltage magnitude alone can be used for classifying
different types of faults. To test this logic, an algorithm was developed in [27] that used only voltage
magnitudes for fault classification. Using the IEEE-118 bus system as the test system and incorporating
similar error and white noise percentages, the precision of the trees created using only voltage magnitudes
is compared with the trees obtained using the proposed approach. Table II shows the trees with the best
and worst performances for the positive sequence state estimator output. These performances were picked
from the ten trees created for the ten lines for the two algorithms. It was found that the tree for line 38-65
had the worst performance (93.06% test accuracy) for the algorithm using voltage magnitudes alone,
whereas faults on all ten lines were identified with 100% accuracy by treating the voltage phasors as a
single entity as was done using the proposed approach. It is to be noted here that the worst performance
was based on the complexity of the tree (more number of terminal nodes and higher tree depth) and its
resulting lower accuracy. For the three phase state estimator output shown in Table III, two trees with
different number of terminal nodes were created for the algorithm using only voltage magnitudes to show
how the error counts for the trees decrease as the number of terminal nodes were increased. However,
from this table also it becomes clear that the trees created using the proposed algorithm are simpler,
smaller and more accurate in comparison with the ones obtained using the algorithm based on voltage
magnitudes alone.
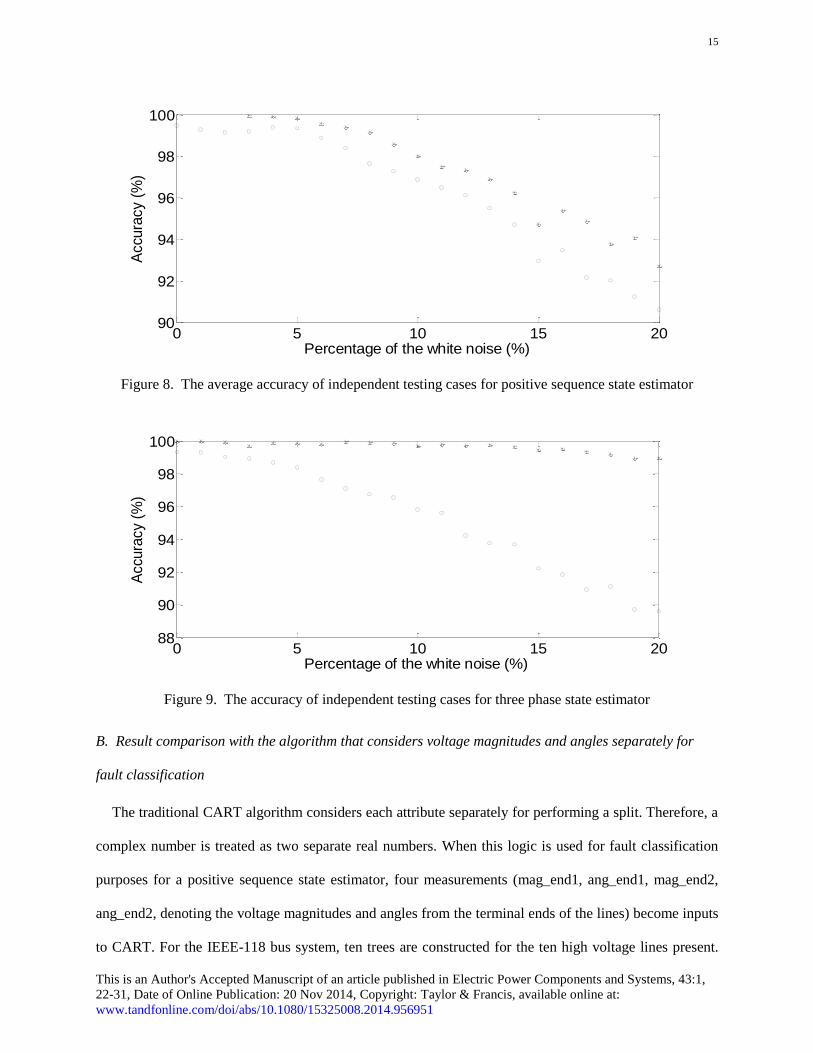
To test the effect of white noise on both the algorithms, the white noise percentage was increased from
0% to 20% in steps of 1%. The training and testing of the trees was repeated for all 21 cases (0% to 20%)
for both the algorithms. Figures 8 and 9 depict the results obtained. The stars denote percentage
accuracies for the proposed algorithm while the circles denote the same for the algorithm that uses voltage
magnitudes alone. From the plots, it can be inferred that as the percentage of white noise is increased, the
accuracy of the proposed algorithm continues to remain high while the one that uses voltage magnitudes
alone drops considerably. Based on these results, it is realized that the trees generated using the proposed

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
14
algorithm are more accurate, reliable and resilient to errors in inputs than the algorithm that uses only
voltage magnitudes.
TABLE II
COMPARISON OF ALGORITHM PERFORMANCE FOR POSITIVE SEQUENCE STATE ESTIMATOR OUTPUT
Algorithm
The Tree with the Best Performance The Tree with the Worst Performance
Number
of
Terminal
Nodes
Tree
Depth
Learning
Accuracy
(%)
Testing
Accuracy
(%)
Number
of
Terminal
Nodes
Tree
Depth
Learning
Accuracy
(%)
Testing
Accuracy
(%)
Voltage
Magnitude
4 3 100 100 10 8 98.50 93.06
Proposed
Approach
4 3 100 100 4 3 100 100
TABLE III
COMPARISON OF ALGORITHM PERFORMANCE FOR THREE PHASE STATE ESTIMATOR OUTPUT
Algorithm
Number of
Terminal
Nodes
Tree
Depth
Learning
Accuracy (%)
Testing
Accuracy (%)
Error Counts for
11400 cases
Voltage
Magnitude
10 6 99.35 99.296 77
16 8 99.983 99.963 3
Proposed
Approach
10 5 100 99.981 1
This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
15
Figure 8. The average accuracy of independent testing cases for positive sequence state estimator
Figure 9. The accuracy of independent testing cases for three phase state estimator
B. Result comparison with the algorithm that considers voltage magnitudes and angles separately for
fault classification
The traditional CART algorithm considers each attribute separately for performing a split. Therefore, a
complex number is treated as two separate real numbers. When this logic is used for fault classification
purposes for a positive sequence state estimator, four measurements (mag_end1, ang_end1, mag_end2,
ang_end2, denoting the voltage magnitudes and angles from the terminal ends of the lines) become inputs
to CART. For the IEEE-118 bus system, ten trees are constructed for the ten high voltage lines present.
0 5 10 15 2090
92
94
96
98
100
Percentage of the white noise (%)
Accu
racy
(%)
0 5 10 15 2088
90
92
94
96
98
100
Percentage of the white noise (%)
Accu
racy
(%)
This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
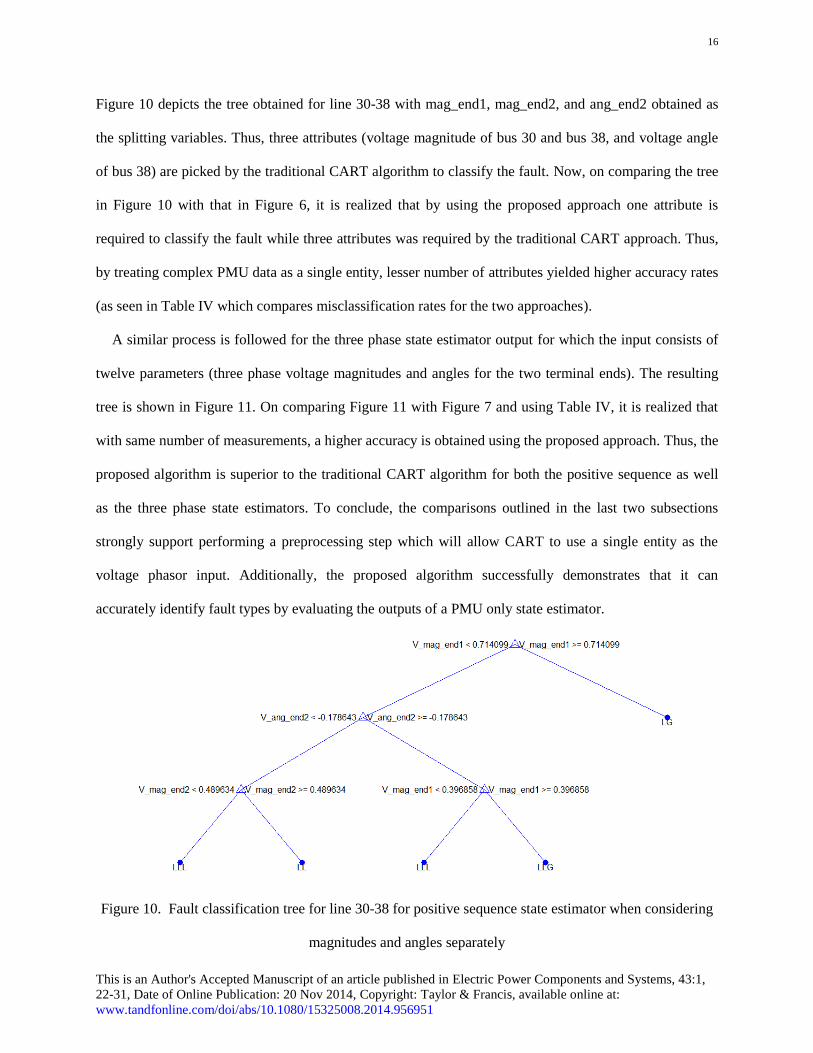
16
Figure 10 depicts the tree obtained for line 30-38 with mag_end1, mag_end2, and ang_end2 obtained as
the splitting variables. Thus, three attributes (voltage magnitude of bus 30 and bus 38, and voltage angle
of bus 38) are picked by the traditional CART algorithm to classify the fault. Now, on comparing the tree
in Figure 10 with that in Figure 6, it is realized that by using the proposed approach one attribute is
required to classify the fault while three attributes was required by the traditional CART approach. Thus,
by treating complex PMU data as a single entity, lesser number of attributes yielded higher accuracy rates
(as seen in Table IV which compares misclassification rates for the two approaches).
A similar process is followed for the three phase state estimator output for which the input consists of
twelve parameters (three phase voltage magnitudes and angles for the two terminal ends). The resulting
tree is shown in Figure 11. On comparing Figure 11 with Figure 7 and using Table IV, it is realized that
with same number of measurements, a higher accuracy is obtained using the proposed approach. Thus, the
proposed algorithm is superior to the traditional CART algorithm for both the positive sequence as well
as the three phase state estimators. To conclude, the comparisons outlined in the last two subsections
strongly support performing a preprocessing step which will allow CART to use a single entity as the
voltage phasor input. Additionally, the proposed algorithm successfully demonstrates that it can
accurately identify fault types by evaluating the outputs of a PMU only state estimator.
Figure 10. Fault classification tree for line 30-38 for positive sequence state estimator when considering
magnitudes and angles separately

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
17
Figure 11. Fault classification tree for three phase sequence state estimator when considering magnitudes
and angles separately
TABLE IV
COMPARISON OF ALGORITHM PERFORMANCE FOR PMU ONLY STATE ESTIMATOR OUTPUT
Scenario
Using Traditional CART approach Using Proposed Algorithm
Number of Nodes
Misclassification
Rate (%)
Number of Nodes
Misclassification
Rate (%)
Positive Sequence
State Estimator
4 or 5 2.53 4 0
Three Phase State
Estimator
10 1.50 10 0.0088

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
18
6. CONCLUSION
This paper presents a voltage phasor based fault classification technique for transmission lines that
uses CART and is intended for labeling the fault type for system operators who will be seeing the outputs
of a PMU only state estimator. The novelty of this paper lies in the fact that unlike other fault
classification techniques that need currents as well as voltages the proposed approach can successfully
classify faults using only the voltage phasor (obtained directly from the outputs of a PMU only state
estimator). The proposed algorithm handles two categories of voltage phasor data (positive sequence and
three phase). PowerWorld® and DSA Tools® were used for data generation process, while MATLAB®
was used for the classification process. Using positive sequence voltage phasors, faults were classified
into four types, whereas three phase voltage phasors were able to classify faults into ten types.
The training and testing data were generated under a variety of system conditions. The precision of the
algorithm was evaluated by applying it on completely independent data sets. The robustness of the
algorithm was validated by changing different parameters (pre-fault and fault conditions) and adding
white noise to the inputs. The parameters that were varied include the fault impedance, the fault incidence
angle, the fault location, the loading angle of the line, and the load trajectory before and/or during the
fault. Compared with the algorithm that uses only voltage magnitude and the one that treats voltage
magnitude and angle separately, the tree created using the proposed approach was found to classify short
circuit faults with higher accuracy. Simulation results indicate that the proposed technique is highly
effective, robust, and easily applicable to large power system networks.
7. ACKNOWLEDGEMENTS
The authors gratefully acknowledge the financial support provided by the Lockheed Martin
Corporation. Special thanks also go to the faculty members and students of the Power Lab at Virginia
Tech for their valuable suggestions and useful discussions. The authors would like to especially thank Dr.
Jaime De La Ree and Dr. Victor Ortiz for their generous help.
This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
19
8. REFERENCES
[1] A. Abur, and A. G. Exposito, Power System State Estimation: Theory and Implementation. New
York: Marcel Dekker, 2004.
[2] A. G. Phadke, and J. S. Thorp, Synchronized phasor measurements and their applications. Springer
Science and Business Media, 2008, pp. 141-144.
[3] M. Zhou, V. A. Centeno, J. S. Thorp, and A. G. Phadke, “An Alternative for Including Phasor
Measurements in State Estimators,” IEEE Trans. Power Syst., vol. 21, no. 4, pp. 1930-1937, Nov.
2006.
[4] K. D. Jones, J. S. Thorp, and R. M. Gardner, “Three-phase linear state estimation using phasor
measurements,” in Proc. IEEE Power Eng. Soc. Gen. Meeting, Vancouver, BC, Canada, pp. 1-5, 21-
25 Jul. 2013.
[5] A. G. Phadke, and J. S. Thorp, Computer Relaying for Power Systems (2nd Ed.). John Wiley, 1988,
pp. 96-98, 144, 166-174.
[6] O. A. S. Youssef, “Combined fuzzy-logic wavelet-based fault classification technique for power
system relaying,” IEEE Trans. Power Del., vol. 19, no. 2, pp. 582-589, Apr. 2004.
[7] K. M. Silva, B. A. Souza, and N. S. D. Brito, “Fault detection and classification in transmission lines
based on wavelet transform and ANN,” IEEE Trans. Power Del., vol. 21, no. 4, pp. 2058-2063, Oct.
2006.
[8] Z. He, L. Fu, S. Lin, and Z. Bo, “Fault detection and classification in EHV transmission line based on
wavelet singular entropy,” IEEE Trans. Power Del., vol. 25, no. 4, pp. 2156-2163, Oct. 2010.
[9] T. Dalstein, and B. Kulicke, “Neural network approach to fault classification for high speed
protective relaying,” IEEE Trans. Power Del., vol. 10, no. 2, pp. 1002-1011, Apr. 1995.
[10] P. K. Dash, S. R. Samantaray, and G. Panda, “Fault classification and section identification of an
advanced series-compensated transmission line using support vector machine,” IEEE Trans. Power
Del., vol. 22, no. 1, pp. 67-73, Jan. 2007.

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
20
[11] PowerWorld, PowerWorld Corporation. http://www.powerworld.com/
[12] DSA Tools, Powertech Labs Inc., Surrey, British Columbia, Canada. http://www.DSATools.com/
[13] MATLAB version 7.10.0, (computer software), The MathWorks Inc., 2010.
[14] L. Breiman, J. Friedman, R. Olshen, and C. Stone, Classification and Regression Tree.
Wadsworth & Brooks/Cole Advanced Books & Software, Pacific California, 1984.
[15] IEEE-118 Bus System. [Online]. Available:
http://www.ee.washington.edu/research/pstca/pf118/pg_tca118bus.htm
[16] S. M. Deshmukh, B. Dewani, and S. P. Gawande, “A review of power quality problems-voltage
sags for different faults,” Int. J. Sci. Eng. Tech., vol. 2, no. 5, pp. 392-297, May 2013.
[17] F. Gao, J. S. Thorp, A. Pal, and S. Gao, “Dynamic state prediction based on auto-regressive (AR)
model using PMU data,” in Proc. IEEE Power and Energy Conference at Illinois (PECI),
Champaign, IL, pp. 1-5 Feb. 2012.
[18] I. H. Mori, “State-of-the-art overview on data mining in power systems,” in Proc. IEEE Power
Eng. Soc. General Meeting, Montreal, QC, Canada, pp. 1-5, 18-22 Jun. 2006.
[19] E. E. Bernabeu, J. S. Thorp, and V. A. Centeno, “Methodology for a security/dependability
adaptive protection scheme based on data mining,” IEEE Trans. Power Del., vol. 27, no. 1, pp. 104-
111, Jan. 2012.
[20] R. F. Nuqui, A. G. Phadke, R. P. Schulz, and N. Bhatt, “Fast on-line voltage security monitoring
using synchronized phasor measurements and decision trees,” in Proc. IEEE Power Eng. Soc. Winter
Meeting, Columbus, OH, vol. 3, pp. 1347-1352, 28 Jan.-1 Feb. 2001.
[21] M. Li, A. Pal, A. G. Phadke, and J. S. Thorp, “Transient stability prediction based on apparent
impedance trajectory recorded by PMUs,” Int. J. Elect. Power Energy Syst., vol. 54, pp. 498-504, Jul.
2013.
[22] G. Qun, and S. M. Rovnyak, “Decision trees using synchronized phasor measurements for wide-
area response-based control,” IEEE Trans. Power Syst., vol. 26, no. 2, pp. 855-861, May 2011.
[23] Salford Systems, CART. [Online]. Available: http://www.salford-systems.com/cart.php.

This is an Author's Accepted Manuscript of an article published in Electric Power Components and Systems, 43:1,
22-31, Date of Online Publication: 20 Nov 2014, Copyright: Taylor & Francis, available online at:
www.tandfonline.com/doi/abs/10.1080/15325008.2014.956951
21
[24] S. K. Murthy, S. Kasif, and S. Salzberg, “A system for induction of oblique decision trees,” J.
Artific. Intell. Res., vol. 2, no. 1, pp. 1 -32, 1994.
[25] A. Pal, J. S. Thorp, T. Khan, and S. S. Young, “Classification trees for complex
synchrophasor data,” Elect. Power Compon. Syst., vol. 41, no. 14, pp. 1381-1396, Sep. 2013.
[26] S. Dan, and P. Colla, CART: Tree-Structured Non-Parametric Data Analysis. San Diego, CA:
Salford Systems, 1995.
[27] F. Gao, J. S. Thorp, S. Gao, A. Pal, “Fault analysis based on PMU only state estimator,”
submitted to Automation of Electric Power Systems.