activity booklet of fischertechnik txt discovery set
DESCRIPTION
Activity Booklet of fischertechnik Robotics TXT Discovery SetTRANSCRIPT


TXT Discovery Set
ROBOTICS
2
Welcome to the fischertechnik World of ROBOTICS 4
Some General Information 5
Electricity 5
AboutthisActivityBooklet 5
Robot,ArtificialHumans? 6
ROBOTICS,(Almost)EverythingAutomatic 7
Component Explanations 8
EncoderMotors 8
XSMotor 9
LEDs 9
LensTipLamp 9
Phototransistor 10
Pushbutton 10
HeatSensor(NTC) 11
CameraModule 11
ROBOTICSTXTController 12
A Few Tips 13
First Steps 14
Starter Models 15
Pedestrianlight 15
Handdryer 16
TemperatureControl 18
Barrier 19
"CameraMan" 20
SwivelingCamera 22
TXT Discovery Set
ROBOTICS
3
Mobile Robots - The Next Challenge 23
MobileRobot 23
HindranceDetector 27
HindranceDetectorwithCamera 28
TrailSearcher 30
DetectionRobot 33
SoccerRobotwithMovementControl 35
SoccerRobot 38
Trouble Shooting 43
InterfaceTest 43
CablesandWiring 43
LooseConnection 43
ShortCircuits 44
PowerSupply 44
ErrorsintheProgram 44
CameraFunction 44
LastSourcesforHelp 45
And what else can I do? 46

TXT Discovery Set
ROBOTICS
4
Welcome to the fischertechnik World of ROBOTICS
Hello!
Wearehappyyouhavechosenthe"ROBOTICSTXTDiscoverySet"constructionsetfromfisch-ertechnik.Becausewiththisconstructionsetyoucanconductmanyinterestingexperimentsandsolveexcitingtasks.
Readthisdigitalbookletandtrytheexperimentsandtasks,tolearnstep-by-stephowyoucancontrolandprogramsimpleaswellascomplicatedmachinesandrobotsusingtheROBOTICSTXTControllerfromfischertechnik.
Learningisaprocessofbuildingthingsupfromafoundationanditisnotpossibletostartwiththemostdifficultthingsrightaway,eventhoughtheymaybealittlebitmoreinterestingthanthemoresimpletasks.Thisiswhywehavestructuredtheexperimentsandtasksinthisbookletsothatyoulearnsomethingdifferentwitheverynewtaskandcanthenusethisasthebasisforthenexttask.
Sodon'tworry,wewillstartwithsmallthingsandthenworktogethertoprogresstothebigrobots.
WehopeyouhavealotoffunandsuccessnowexperimentingwithyourROBOTICSTXTDiscoverySet.
Yourteamfrom

TXT Discovery Set
ROBOTICS
5
Some General Information
Beforewereallygetstartedwiththeconstructionset,youstillneedtoknowafewthings.Eventhoughthecomponentswewillworkwithareveryrobust,ifyoudonothandlethemproperly,theycanbedamagedundercertaincircumstances.
Electricity
Asyoucertainlyknow,alotofthecomponentsintheROBOTICSTXTDiscoverySetuseelectricpower.Andyouknowitisnecessarytobeparticularlycarefulnottomakeanymistakeswhenworkingwithelectricalcomponents.Thatiswhyyoushouldalwaysreadtheassemblyinstructionsverycarefullywhenwiringtheelectricalcomponents.
Neverconnectthepositiveandnegativepolesdirectlytooneanothertopreventashort-circuit.ThiscandamagetheROBOTICSTXTControllerortherechargeablebattery.
Thesubjectsofelectricityandelectronicsarejustasinterestingasrobotics(whichiswhatthisconstructionsetisabout)andthereisaconstructionsetfromfischertechnik,whichdealsspecificallywiththesesubjects.Ifyouareinterestedinthis,youwillalsohavejustasmuchfunwithour"PROFIElectronics"constructionsetaswiththeROBOTICSTXTDiscoverySet.
About this Activity Booklet
ThisPDFactivitybooklethasanumberoffunctions,whicharenotpresentintheprintedbookletandwhichmayalreadybefamiliartoyoufromtheInternet.
▯ Links within the Booklet
Whensomethingismentionedsomewhereinthetext,whichisexplainedinmoredetailatanotherpointinthisbooklet(forexample,components),thetextappearsindarkblueandunderlined.Youcanclickonthetexttomoveautomaticallytothepagecontainingtheexplanation.Thisiscalleda"crossreference."

TXT Discovery Set
ROBOTICS
6
▯ Background Infos
Insomecasesinthisbooklet,therearetermsorforeignwords,whichmayrequireexplanation.Thesetermsaredisplayedingreenandunderlined.Ifyoutouchthetextwiththemousepointer,awindowappearswithanexplanation.
▯ Link Outside of this Booklet
AfewlinksrequireanInternetconnection(forexample,thefischertechnikwebsite),oraninstalledROBOPro(forconnectiontotheROBOProonlinehelp).Thesetermsaredisplayedinlightblueandunderlined.
▯ Pictures
Apictureiswortha1000words.Youhavecertainlyheardthissentencebefore.Andbecausethiscertainlycontainsalotoftruth,youcandisplayapicturebytouchingthewordsinbrownandunderlinedtoseeapictureshowingwhatismeantinthetext.
▯ The ROBO Pro Icon
Thisisalwayslocatedinthevicinityoftasks.Thismakessense,becauseassoonasyouclickonit,asuitableexampleprogramopenswithapossiblesolution.
Allexampleprogramsarelistedunder C:\Programs (x86)\ROBOPro\Example programs\ROBO TX Automation Robots.[Translatorsnote:HavethesedirectorynamesbeenprogrammedinEnglish?Ifnot,theywillhavetoremaininGerman.]
Robot, Artificial Humans?
Whatisyourfirstthoughtwhenyouheartheword"robot?"Haveyoueverseenarobot?Inamovieorontelevision?Orperhapsarealone?
Therearemanydifferenttypesofrobots.Somerobotslookabitlikeahuman,whileothershaveonlyoneormorearms.So,whatexactlymakesarobotarobot?
Thedictionarystates:"Robotsarestationaryormobilemachines,whichperformsettasksaccordingtoacertainprogram."
click-me.rpp

TXT Discovery Set
ROBOTICS
7
ROBOTICS, (Almost) Everything Automatic
Thus,robotsaremachinescontrolledbyaprogram.Andwecallthiscontrolofmachines(orinourcasemodels)"ROBOTICS."
The"ROBOTICSTXTDiscoverySet"providesyouwithawonderfulstarttolearnaboutthissubject.Thisisbecausetheconstructionsetcontainseverythingyouneedtobuildandcontrolmanydifferentmachines.
YoucancreatetheprogramsforcontrolofthemodelsonaPCwiththeaidoftheROBOPro4.0(orhigher)softwareandthentransferthemtotheROBOTICSTXTControllerusingtheUSBorBluetoothconnection.Thecontrollerthencontrolsoroperatesthemodelaccordingtotheprogramyouhaveprepared.

TXT Discovery Set
ROBOTICS
8
Component Explanations
The construction set contains all of the followingFirst,itcontainsnumerousfischertechnikbuildingblocks,aswellasmotors,indicatorlightsandsensorsandcoloredassemblyinstructionsforbuildingvariousmodels.
Afteryouhaveunpackedallthebuildingblocks,itisnecessarytofirstassembleafewcomponentssuchascablesandplugsbeforeyoucanreallygetstarted.Detailsaregivenintheassemblyinstructionsunder"AssemblyTips."Itisbesttodothisfirst.
ActuatorsActuatorsareallcomponents,whichcanperformsometypeofaction.Thismeansthattheybecome"active"insomewaywhentheyareconnectedtoelectricpower.Inmostcasesyoucanseethisdirectly.Amotorruns,anindicatorlightilluminatesandsoforth.
Encoder Motors
Weusethetwoencodermotors,containedintheconstructionset,todriveourrobots.Atfirstglance,thesearenormalelectricmotors,designedforavoltageof9voltsandmaximumcurrentinputof0.5amperes.
Buttheencodermotorscandomore:Inadditiontotheconnectionforthepowersupplyforthemotor,theyhaveanotherconnectorforathree-pinconnectioncable,whichisusedincombinationwithaso-calledencodertomeasuretherotationofthemotor.
Thisencoderworksthesamewayasaspeedometeronabicycle.Amagnet(inmostcasesforabicyclelocatedononeofthespokes)passesbyasensor(attachedtotheforkofthebicycleinmostcases)witheachrevolutioncausingthesensortogenerateapulse.Thesepulsescanbecounted,and,inthecaseofaspeedometer,forexample,multipliedbythecircumferenceofthetire.Thisgivesusthedistancetraveled.
Theencodersonthefischertechnikencodermotorsgeneratethreepulseseachtimethemotorshaftrevolvesonce.Andbecausetheencodermotorsalsohaveagearboxwithatransmissionratioof21:1

TXT Discovery Set
ROBOTICS
9
(read"21to1"),onerevolutionoftheshaftcomingoutofthegearbox,correspondsto21x3=63encoderpulses.
XS Motor
TheXSmotorisanelectricmotor,exactlyaslongandhighasafischertechnikbuildingblock.Inaddition,itisverylight.Thismeans,youcaninstallitatpointstoosmallforthebigmotors.
BothgearboxesincludedintheconstructionsetfitperfectlyontheXSmotor.
TheXSmotorisdesignedforasupplyvoltageof9voltsandamaximumcurrentof0.3amperes.
LEDs
TwoLEDsarecontainedintheconstructionset.Theycanbeusedinavarietyofways.Forexampleassignallightsinatrafficlight,asflashinglightsonarobotorforbetterilluminationofanimagesuppliedbythecameraalsoprovidedintheconstructionset.
TheLEDsaredesignedforavoltageof9voltsandconsumeapproximately0.01amperesofcurrent.
Caution! When connecting LEDs to the power supply, always pay particular attention to correct polarity. Connect the positive pole to the red marking on the LED.
Lens Tip Lamp
Thisincandescentbulbcontainsalenstofocusthelight.ItlooksverysimilartoanLED.Becarefulnottomixthemup.Onthelenstiplampthepolaritymakesnodifference-thisiswhythesocketisnotmarked.Youneedthelenstiplamptobuildalightbarrierincombinationwiththephototransistor.
Thelenstiplampisdesignedforavoltageof9voltsandcurrentofapprox.0.15amperes.

TXT Discovery Set
ROBOTICS
10
SensorsSensorsaresotospeakthecounterparttotheactuators.Thisisbecausetheydonotperformanyactions,butreacttocertainsituationsandevents.Forexample,apushbuttonreactswhenpressed,allowinganelectriccurrenttofloworinterruptingitsflow.Aheatsensorreactstothetemperatureinitssurroundings.
Phototransistor
Phototransistorsarealsocalled"lightsensors“.Thisisa"feeler"thatreactstobrightness.
Foralightbarrierthisisthecounterparttothelenstiplamp.Whenthereisahighdegreeofbrightness,thatiswhenthetransistorreceiveslightfromthelenstiplamp,itconductselectricity.Ifthebeamoflightisinterrupted,itdoesnotconductanyelectricity.
Caution! When connecting the phototransistor to the power supply, pay particular attention to correct polarity. Connect the positive pole to the red marking on the phototransistor.
Pushbutton
Thepushbuttoncouldalsobecalledatouchsensor.Pressingtheredbuttonactuatesaswitchmechanicallyallowingelectricitytoflowfromcontact1(middlecontact)tocontact3.Atthesametimethecircuitbetweencontacts1and2isinterrupted.Soyoucanusethepushbuttonintwodifferentways:
As a "normally open switch" (NO or push-to-make switch)
Contacts1and3areconnected.
Pushbuttonswitchpressed:Electricityflows.Whenthepushbuttonisnotpressed:Electricitydoesnotflow
As a "normally closed switch" (NC or push-to-break switch)
Contacts1and2areconnected.
Pushbuttonswitchpressed:Noelectricityflows.Whenthepushbuttonisnotpressed:Electricityflows.
3
1
2
3
1
2

TXT Discovery Set
ROBOTICS
11
Heat Sensor (NTC)
Thiscomponentisaheatsensorformeasuringtemperatures.At20°Citselectricalresistanceis1.5kΩ(kiloohms,butpronounced'kil-ohms').NTCstandsforNegativeTemperatureCoefficient.Thissimplymeansthattheresistancevaluedecreaseswhenthetemperatureincreases.
Theinformationprovidedbythesensors,forexample,bright/dark,pressed/notpressedandtemperaturevalue,can,aswewillseelater,betransmittedbytheROBOTICSTXTControllertoaPCwhereitcanbeusedincombinationwiththesoftwaretoprogramamotortodriveafanwhenalightbarrierisinterrupted.
Camera Module
Thecameramoduleisaparticularlyversatiletypeofsensor.Theimageresolutionis1megapixel(meaningthateachimageconsistsofonemillionimagedots).ConnectthecameratothelargeUSBport(USB1)onyourROBOTICSTXTController.TheimagesfromthecameracanbetransferredtothePCandviewedonthemonitor.Thisallowsyoutoseewhatyourrobotisdoingatanyparticulartime.MoreovertheROBOTICSTXTControllercanprocesstheimagestherebyrecognizingmotion,colorsandtracks,allowingyoutocontrolyourrobotmodelaccordingly.ItisalsopossibletoconnectthecameradirectlytoaUSBinterfaceonyourPCandprocesstheimageswiththeROBOProsoftware.Thispossibilityisalsousedbyafewmodels.
Youcanfocusthecameraimagebyturningthecameralens.
ROBO Pro 4.x SoftwareROBOProisagraphicprogramminginterfaceforcreatingprogramsfortheROBOTICSTXTController.
A"graphicprogramminginterface"allowsyoutocompileprogramsvisuallywiththeaidofgraphicsymbolsinsteadof"writing"themoutby

TXT Discovery Set
ROBOTICS
12
handlineforline.Anexampleofsuchaprogramisshownattheleft.
TheprocedureforcreatingsuchaprogramisdescribedindetailintheChapter"FirstSteps".TheROBO Pro HelpfeaturealsoshowshowthisworksinChapters3and4.
ThissoftwarehasalreadybeeninstalledonyourPCtogetherwiththisactivitybooklet.
ROBOTICS TXT Controller
TheROBOTICSTXTControlleristheheartofthisROBOTICSconstructionset.Itcontrolsactuators,andevaluatestheinformationfromthesensors.
ForthispurposetheROBOTICSTXTControllerhasnumerousterminalsforconnectiontothecomponents.TheinstructionmanualfortheROBOTICSTXTControllerdescribeswhichcomponentscanbeconnectedtowhichconnectionsandthefunctionsoftheconnections.
ThecolortouchscreenallowsconvenientoperationofyourROBOTICSTXTController.ThecameracontainedintheconstructionsetcanbeconnectedtotheUSBhostport(USB-1).TheintegratedBluetoothandWLANinterfaceisaparticularlyinterestingspecialfeature.ItallowsyoutocompleteawirelesslinkbetweenyourPCandtheROBOTICSTXTController.
YoucandefinehowthecontrollerinteractswiththeindividualcomponentsandwhattheyaretodoindetailintheprogramyouwritewiththeROBOProsoftware.
Power Supply (not included)Asyouknow,manyofthecomponentsintheROBOTICSTXTDiscoverySetneedelectricitytooperate,sonaturallyyoualsoneedapowersupply.
ThefischertechnikAccuSetisbestsuitedforthis.Itisnotincludedintheconstructionset.

TXT Discovery Set
ROBOTICS
13
A Few Tips
Experimenting makes the most fun when the experiments also work. This is why you should follow a few basic rules when building the models.
Work carefullyTake your time and look precisely at the assembly instructions for the model. If you have to look for an error later, this will take much longer.
Check the movement of all partsWhen putting models together continually check to see if parts, which have to move, move easily.
Use Interface TestBefore starting to write a program for a model, you should test all parts connected to the ROBOTICS TXT Controller, using the interface test feature in ROBO Pro. How this works is described in the ROBO Pro help in Chapter 2.4.

TXT Discovery Set
ROBOTICS
14
First Steps
Nowthatyouhavemadeallofthepreparationsandreadtheinformation,youcanfinallystartworking.
Thischapterdescribeshowto:
▯ buildthefirstsimplemodel,aventilatingfan,andconnectittotheROBOTICSTXTController,
▯ connecttheROBOTICSTXTControllertothepowersupplyandPC,
▯ loadtheROBOProSoftwareandtestthemodel,
▯ loadandstartaROBOProprogram,and
▯ createandstartyourfirstsimpleprogramwithROBOPro
Clickhere,toseethefirst,easy-to-understandsteps.
SinceyouwillbeworkingparticularlywiththeROBOProSoftwareinadditiontothefischertechnik
componentsthemselves,youshouldbefamiliarwiththedetailsforwritingprograms.AndbecausethisisexplainedveryclearlyinChapters3and4oftheROBO Pro Help,it
isbestatthispointtocontinuebyworkingthroughthesechapterscarefully.
Thefollowingtipalsoapplieshere:Takeyourtimeandconcentrate;thenyouwillhavethatmuchmorefunwiththemodelslater.

TXT Discovery Set
ROBOTICS
15
Starter Models
AfterreadingthroughChapters3and4intheROBO Pro Help,youwillbeabletoprogramsomeofthemodelsintheconstructionset.Let'sgetstarted.ROBOProhasvariouslevels,whichyoucanselectonthemenubar.WewillstartwithverysimpleprogramsatLevel1.Wheneveryouhavefinishedbuildingandwiringamodel,checkwhetherallinputsandoutputsontheROBOTICSTXTControllerareproperlyconnectedandifthesensors,motorsandlightsallfunctionproperlywiththeaidoftheinterface test.
Pedestrian light
Apedestrianlighthasbeeninstalledinfrontofyourhouse.Sincethetechnicianfromthetrafficlightcompanydoesn'thavemuchtime,youoffertoprogramthetrafficlightcontrolforhim.
Themanexplainstoyouhowthecontrolissupposedtowork.Butfirst,buildthemodel.
Task: (Level1)
Thetrafficlightshouldberedinitially.WhenpushbuttonI1ispressedbyapedestrianthetrafficlightshouldchangetoyellowthreesecondslaterandafteranadditionalfoursecondstored.Thegreenphaseistolastfor10seconds,beforethelightturnsredagain.
Programming Tips:
ThevariousLEDsareassociatedwiththefollowingoutputsontheTXTController.
▯ Red–M1
▯ Green–M2
Turntheindicatorlightsonandoffoneafteranothertoobtainthedesiredsequence.
Youcanloadthefinishedprogrambyclickingonthepictureontheright. Pedestrian_light.rpp

TXT Discovery Set
ROBOTICS
16
Hand dryer
Inthebathroomatyourschool,newhanddryershavebeeninstallednexttothesinks.Theseareequippedwithlightbarriersforswitchingthefanonandoff.
First,buildthemodelasdescribedintheassemblyinstructions.
Task 1: (Level 1)
Nowitisnecessarytoprogramthehanddryersothatassoonasthelightbarrierisinterruptedthefanswitchesonandthenbackoffagainafter5seconds.
Programming Tips:
IntheprogramsequencefirstswitchonthelightforthelightbarrieratoutputM2.
Thenwaitonesecondtoallowthephototransistortimetoreacttothelight.Thelightbarriershouldthenworkproperly.
Thencheck(interrogate)thephototransistoratInputI1.Ifthevalueis"1"(lightbarriernotinterrupted),theinputshouldbeinterrogatedcontinuouslyinaloop.
Assoonasthevaluechangesto"0"(lightbarrierinterrupted),switchmotorM1onandthenbackoffafter5seconds.
Thenreturntotheloopforinterrogatingthephototransistor.
Starttheprogramwiththestartbuttonandcheckwhetheritworksthewayyouwant.Ifitdoesworkright,you'reonyourwaytobecomingaprofessionalROBOProprogrammer.
Ifitdoesn'twork,trytofindoutwhy.
Theinterface testallowsyoutocheckwhetherallinputsandoutputsworkproperlyandiftheyareconnectedcorrectly.
Whiletheprogramisrunning,youcanfollowtheprogramsequencewiththeredbuildingblocks.Thisallowsyoutoquicklyseewhereanerrorhascreptin.

TXT Discovery Set
ROBOTICS
17
Finallyyoucancompareyourprogramwiththefinishedexampleprogram,whichcanbecalledwiththeiconontheright.
Afteryouhavetakenthishurdle,wewanttochangethetaskslightly:
Task 2: (Level 1)
Theschoolprincipalisalwaysinterestedinsavingenergyanddoesn'tlikethehanddryertocontinuerunningafteryourhandsaredry.Heasksyoutorewritetheprogramsothatthefanshutsoffassoonasyoupullbackyourhands.That'snotaproblemforyou,isit?
Programming Tips:
Asinthefirstprogram,itisnecessarytointerrogatethephototransistorI1.Ifthevalueis"0,"switchmotorM1onandifthevalueis"1"switchmotorM1offandsoforth.
Forthistask,thereisalsoacompleteprogramjustincase:
Handdryer_1.rpp
Handdryer_2.rpp

TXT Discovery Set
ROBOTICS
18
Temperature Control
Athomewhereyoulive,anewairconditioningsystemhasbeeninstalled.Ofcourse,youimmediatelyaskedtheplumberhowthetemperaturecontrolworks.Hewashappytoexplaintoyouthatatemperaturesensorcontinuallymeasuresthetemperature.Assoonasamaximumvalueisexceeded,theairconditioningisswitchedon.However,ifthetemperatureisbelowtheminimumvalue,theairconditioningisswitchedoffandtheheatingturnedon.Nowyouneedtotrytoprogramacontrolcircuitbasedonthe"temperaturecontrol"model.Butfirst,buildthemodel.
Task: (Level 1)
TheheatingissimulatedbylenstiplampM2.ThefanatoutputM1servesasthe"airconditioningunit".AnNTCthermistoratinputI8isusedtomeasurethetemperature.
Programthemodelsothataboveacertaintemperaturevaluetheheatingisshutoffandthefanisturnedon.Thisistocoolthehouseuntilaminimumvalueisreached.Thenthefanistobeshutoffandtheheatingturnedon.
Programming Tips:
Please note!TheresistanceoftheNTCthermistordecreaseswithincreasingtemperature.Therefore,theuppertemperaturelimitisthesmallestvalueforI8.Thefanshouldswitchonwhenthislimitisreached.ThelowertemperaturelimitisthelargestvalueforI8.Theheatingshouldswitchonwhenthislimitisreached.
YoucanseethevalueofI8atroomtemperatureusingtheinterface test.TurnontheindicatorlightM2andobservehowmuchthevaluedecreases.Nowswitchonthefantofindouthowmuchthevalueincreases.Usethisasabasisforselectingthelimitsforheatingandcooling.
Youcanopenthefinishedprogrambyclickingontheiconontheright.
Temperature_control.rpp
TXT Discovery Set
ROBOTICS
19
Barrier
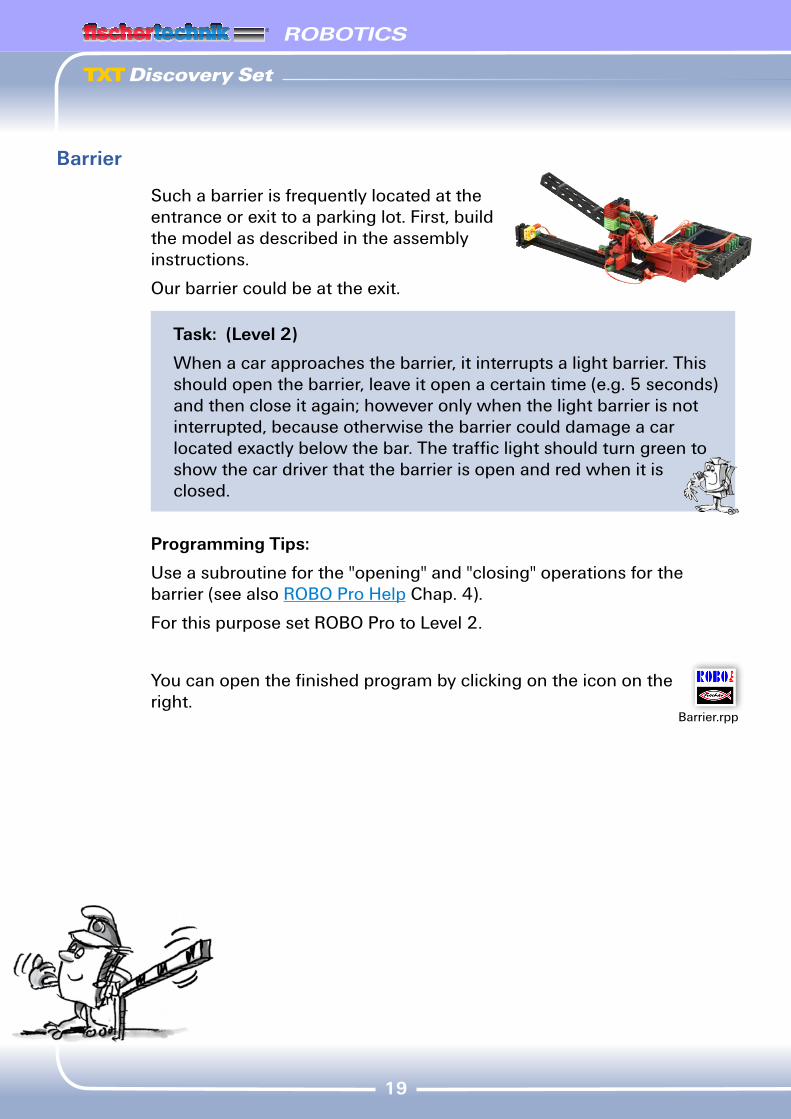
Suchabarrierisfrequentlylocatedattheentranceorexittoaparkinglot.First,buildthemodelasdescribedintheassemblyinstructions.
Ourbarriercouldbeattheexit.
Task: (Level 2)
Whenacarapproachesthebarrier,itinterruptsalightbarrier.Thisshouldopenthebarrier,leaveitopenacertaintime(e.g.5seconds)andthencloseitagain;howeveronlywhenthelightbarrierisnotinterrupted,becauseotherwisethebarriercoulddamageacarlocatedexactlybelowthebar.Thetrafficlightshouldturngreentoshowthecardriverthatthebarrierisopenandredwhenitisclosed.
Programming Tips:
Useasubroutineforthe"opening"and"closing"operationsforthebarrier(seealsoROBO Pro HelpChap.4).
ForthispurposesetROBOProtoLevel2.
Youcanopenthefinishedprogrambyclickingontheiconontheright.
Barrier.rpp

TXT Discovery Set
ROBOTICS
20
"Camera Man"
Nowwewanttotakealookattheinterestingsubjectofcamerasandimageprocessingforthefirsttimeinthisactivitybooklet.Forthispurposebuildthe"cameraman"modelasdescribedintheassemblyinstructionsandconnectthecameradirectlytoyourPCwithaUSBcable.Thecamerawillberecognizedandtheassociatedcameradriverinstalledautomatically.
NowstarttheROBOProsoftware.
Task 1:
PlacethecameramaninfrontofyourPCandletROBOProshowyouwhatthecamera"sees".
Programming Tips:
TodothisitisnotevennecessarytowriteaROBOProprogram.SimplyopenanewprograminROBOPro,gotothe"camera"tab,setthecameraconnectionto"PC"thereandclick"Switchoncamera".
Youcanfocustheimagebyturningthelensonthecamera.
Task 2: (Level 3)
Nowyoucanprogramthecameramantoreacttomotion.Assoonassomeonewalksthroughtheimage,aredlightconnectedtooutputM1shouldflashthreetimesontheTXTController.
Programming Tips:
ConnecttheTXTControllertoyourPCusingasecondUSBinterface.
ConnectanLEDwithredcovertooutputM1ontheTXTController.
Switchtolevel3inROBOPro.RefertotheROBO Pro HelpinChap.5toseetheadditionalfunctionsavailablethere.

TXT Discovery Set
ROBOTICS
21
Drawarectangleofthedesiredsizeinthecamera"Motion"sensorfieldinROBOPro.
Theinteractivefieldformotionrecognition,whichcanbeopenedbyright-clickingwiththemouseontheinsertedsensorfield,allowsyoutosethowintensethemotionmustbetoactuatethesensorandhowextensivethemotionmustbeinrelationtotheentiresensorfield,forittoreact.Thebestwayistotryitwiththedefaultvaluesfirstandthenlaterchangethesettingstoseethereaction.
CreatearoutineinROBOProforcheckingwhetherthesensorfieldhasrecognizedamotion.Tointerrogatethesensorfield,usethecamerainputelementfromLevel3inROBOProandusealooptocheckwhethermotionispresent.
Interrogationof"MotionC"input (Changecontrast).Isthevalue >0?Ifso,thelightshouldflash.
FurtherinformationonthecamerasensorfieldsisgiveninROBO Pro HelpChap.11.
Youcanopenthefinishedexampleprogramhere.
Camera_man.rpp

TXT Discovery Set
ROBOTICS
22
Swiveling Camera
Nextyoucanbuildasurveillancecameraforyourroom.First,buildthemodelasdescribedintheassemblyinstructions.
Task: (Level 3)
Thiscameraisdrivenbyanencodermotortorepeatedlyturnitslightlybeforecheckingifanythingmovesintheroom.Ifso,itshouldtriggeranalarmontheTXTControllerloudspeaker;ifnothingmoves,itshouldcontinuetoturnslightlybeforecheckingagain.
Afterreachingtheendoftheswivelrange,itshouldreturntoitsinitialpositioninsmallincrements.
Programming Tips:
Thecamerashouldfirstmovetoitsinitialposition(untilpushbuttonI1isdepressed).
Thenitshouldrepeatedlymoveacertainnumberofpulsesintheotherdirection.Youcaneasilycheckhowmanypulsesarepracticalperrotationwiththeaidoftheinterface tests.
Usethecamera"Motion"sensorelementtocheckwhetheranythingchangesintheimage.Ifso,triggeranalarmontheTXTControllerloudspeaker,see(ROBO Pro Help).
Repeatthisoperationuntilthecamerareachestheendofitsswivelrange,thenmovebackintheotherdirectiontolimitswitchI1.
Hereisoursolutionforthistask:
ThismodelcanbeoperatedindependentlyofthePCinthedownloadmode.Itistheperfectsurveillancecameratokeeptrespassersoutofyourroom.
Swiveling_camera.rpp

TXT Discovery Set
ROBOTICS
23
Mobile Robots - The Next Challenge
Mobile Robot
Withthismodel,wewanttofindouttogetherhowyoucancontrolamovingrobot.Howdoyougetittomove,howdoesthesteeringworkandcanyouperhapsimproveitsprecision?Wewillanswerthesequestionswiththehelpofthetasksinthischapter.
Butfirstofcourse,youhavetoputtherobottogether.Asalways,youwillfindthedescriptionintheassemblyinstructions.
Takeyourtimeputtingittogether.Lookcloselyatthedrawingsintheassemblyinstructionsandthewiringaswell.IfyoudonotconnectthecomponentstotheROBOTICSTXTControllerasdescribedintheassemblyinstructions,therobotmaynotbehavelikeyouexpect.
Afterassembly,checkallcomponentsconnectedtotheROBOTICSTXTControllerwiththeROBOProsoftwareinterface test.Whenthemotorsturncounterclockwise,therobotshouldmoveforwards.
DirectionofmotionDirectionofrotation,
motor1Directionofrotation,
motor2
Forwards Left LeftBackwards Right Right
Left Left RightRight Right LeftStop Stop Stop
Task 1: Simply Straight Ahead
Havetherobotmovestraightaheadfor3seconds(notonatable,dangeroffallingoff!)andthenstraightbackfor3seconds.
Didtherobotreallycomebacktoitsstartingpoint?
Repeattheprogramseveraltimesandobserveiftherobotreal-lymovespreciselystraightaheadandback.

TXT Discovery Set
ROBOTICS
24
ProgrammingTips:
Evenifthistaskiseasyforyou,wewouldliketomakeafewsuggestions:
The Steering
Evenifitisfuntowatchtherobotmovestraightahead,itissomewhatmonotonous.That'swhy,itisnowtimetolearntomoveinacurve.Andhowisthatdone?Verysimple:
Task 2: Also moving in a curve
Lettherobotmovestraightaheadagainforthreeseconds(bothmotorsturningatthesamespeed)thenchangethedirectionofrotationoftherightmotor(M1)foronesecondandthenlettherobotmovestraightaheadagainforthreeseconds(meaningbothmotorsatthesamespeedinthesamedirection).
Findouthowlongyouhavetoletthemotorsrunindifferentdirectionstomaketherobotturn90°.
Programming Tips:
Forthis,changethewaitingtimeafterthecommandforchangingthedirectionofthesecondmotor.
Youcanopenthefinishedprogramasusualbyclickingontheiconontheright.
Task 3: Moving through a figure
Nowthatyouknowhowlongitisnecessarytoreversethedirectionofrotationofamotortomaketherobotturntotherightorleft,programtherobotsothatitmovesinarectangle,returningtoitsstartingposition.
Makeamarktocheckiftherobotreallymovespreciselytoitsstartingposition.
Mobile_robot_1.rpp
Mobile_robot_2.rpp

TXT Discovery Set
ROBOTICS
25
Programming Tips:
Youcancreateasubroutinefor"turningacorner."Thiskeepsthemainprogramclearer.
Youprobablyalreadyhavethesolutiontothetaskinyourhead.Buthereisanotherrecommendation,justincase:
Always the same, but not exactly?
Youhaveprobablynoticedthattherepetitionaccuracyoftherobotcouldbeimproved.Evenwhenitperformspreciselythesametaskseveraltimes,theresultisnotalwaysthesame.Thisisduetovariousreasons.Oneoftheseisthatbothmotorsdonotrotateatexactlythesamespeed.Forexample,thegearboxforonemotorcanrunwithmorefrictionthantheothermotor.Andbecausebothmotorsareoperatedatthesamevoltage(ninevolts),thismakesonemotorrotateslowerthantheother.Since,inthepast,wehavecontrolledourrobotusingwaitingtimes,perhapsonewheelhasrotatedfartherduringthistimethantheotherone.
Thus,thesolutionwouldbetohavebothmotorsrotateatexactlythesamespeed.Andthisispreciselywhatencodermotorsdo.
Task 4: Using Encoder Motors
Repeatthelasttaskusingtheencodermotorelementsinsteadofthenormalmotoroutputandwaitingtimeelements.HowtousetheseisdescribedintheROBOProhelpinChap.12.6.
Programming Tip:
Withtheencodermotorelementyoucancontrolbothmotorssimultaneouslywithoneprogramelement.Withthedistanceentryfieldyoucanseteachmotortoturnexactlythedistanceitissupposedto.
Mobile_robot_3.rpp
TXT Discovery Set
ROBOTICS
26
Youcanopenthesolutionsuggestionsasusualbyclickingontheiconsontheright.
AnadditionalprogramelementisnotrequiredinROBOProtocountthepulsesatthehighspeedcounterinputsC1-C4.ThecounterinputC1isautomaticallyassignedinternallytomotorM1;M2isconnectedtoC2andsoforth.
Note:Ifthemodeldoesnotmovestraightaheadinspiteofusingtheencodermotorelementsthecausecanbethemodelitself.Forexample,ifahubnut,whichtransferstheforcefromtheaxletothewheels,isnottightenoughtheaxleslipsandthemodelmovesinacurveeventhoughthemotorsarerotatingatthesamespeed.Thereforebesurethehubnutsaretightenedwell.
Mobile_robot_1_sync.rpp
Mobile_robot_2_sync.rpp
Mobile_robot_3_sync.rpp

TXT Discovery Set
ROBOTICS
27
Hindrance Detector
Yourrobotcannowmovestraightaheadandturn.Anduptonowitdoesthispreciselyasdescribedinyourprogram.
However,arobotshouldactuallybeabletoreactasindependentlyaspossible.Thisiswhywenowwanttohaveitreacttoobstacleswiththeaidabumper.
First,buildthemodelasdescribedintheassemblyinstructions.
Task:
Thehindrancedetectorshouldmovestraightahead.Assoonasithitsanobstaclewithitsleftbumper,itshouldstop,movebackashortdistance,turnslightlytotherightandthencontinuetomovestraightahead.Ifithitsanobstaclewithitsrightbumper,itshouldmovearoundtheobstacletotheleftinthesamemanner.
Programming Tips:
Leftbumper:PushbuttonI6;Rightbumper:PushbuttonI5
Useasubroutineforeachofthevariousactions:forwards/reverse,goaroundtoleft/right.
Ensurethattherobotdoesnotmovethesamenumberofpulseswhenmovingtotherightandtotheleft;otherwiseitcouldgetintoacornerandnotbeabletogetout.Howeverifthenumberofpulsesisdifferent,itwillbeabletoworkitswayoutofacorner.
Youcanfindthefinishedprogramhere:
Hindrance_detector.rpp

TXT Discovery Set
ROBOTICS
28
Hindrance Detector with Camera
Nowyoucanequipyourmobilerobotwithacamerasoitcanseewhereitisgoingandallowyoutocontrolitbyremotecontrol.Todothissimplytakethehindrancedetectorandinstallacameraasdescribedintheassemblyinstructions.ThecameracanbeconnectedtotheUSB-1interfaceontheTXTController.
Task 1:
Firsttherobotshouldbehaveinexactlythesamemannerasthehindrancedetectorwithoutcamera.Inadditionitshouldstopandturnaroundwhenyouholdaredcardinfrontofit.
Usethecamera"Color"sensorfieldforcolorrecognitionanddrawitlargeenoughthatitsareacoversthemajorportionofthecameraimage.
Thensettherobotparameterssothatitmovesstraightaheadaslongasaredcardisnotdetectedandnohindranceispresent.Youcanusethehindrancedetectionfromthe"Hindrancedetectorprogram".
Itisbesttouseyourownsubroutineforcheckingthecolor.Checkthecamerainputtodetermineiftheredvalueisgreaterthangreenandblueandifthecolorislighterthanblack.
Usethesmallredcardcutfromthelargecuttingtemplateintheconstructionset.
The"sensorvalues"inthecamerawindowinROBOProshowthecolorvaluefortheredcard.
Againyoucanseeoursolutionhere:
Note:Avoiddirectsunlight.Therobotmayconfusesunlightwiththeredcard.Particularlybrightsunlightwithahighpercentageofred.
Hindrance_detector_camera_1.rpp

TXT Discovery Set
ROBOTICS
29
Task 2: Remote control of robot
Note:ThistaskrequiresaWLANconnectionbetweentheTXTControllerandyourPC.TheprocessforcompletingthisconnectionisdescribedintheinstructionmanualfortheTXTController.
Tips:
AftersuccessfullycompletingtheWLANconnection,opentheappropriateprogramwiththeicon.
Changetothecontrolpanelandlookfortheinterfaceforremotecontrolofthemodelthere.
Starttheprogramintheonlinemode.Nowyoucanusethevariousbuttonsontheremotecontroltocontroltherobotandyoucanalsoseewhereitisgoing.Ifyouoverlookanobstacle,itwillbedetectedbythebumperandthemodelwillautomaticallymovebackashortdistance.
Havefunexploringthearea!
Hindrance_detector_camera_2.rpp

TXT Discovery Set
ROBOTICS
30
Trail Searcher
Withthismodelthecameraisusedtomaketherobotmovealongaline.Theamazingpartoftrailsearchingwiththecameraisthat,inadditiontorecognizingwhetheratrackispresent,itcanalsodetectitsprecisepositionandoutputitinthecameraimage.Thisallowstherobottoreactandeithermovestraightahead,whenthetrailisexactlyinthemiddleoftheimageorcorrectitsmotiontotheleftorright,whenthetrailisnotinthemiddle.
Theobjectiveisfortherobottofindtheblacklineandmovealongit.
Butonethingatatime.First,itisnecessarybuildthetrailsearchermodel.Naturallytheassemblyinstructionsdescribehowtodothis.
Afteryouhavecompletedthemodel,youshouldcheckitwiththeinterface testtoensurethatallcomponentsareproperlyconnectedtotheROBOTICSTXTControllerandareworkingcorrectly.
Task 1: Recognition of a trail
Programtherobotsothatitfollowsastraightblacktrailwhenplacedonit.Ifitlosesthetrailoritends,therobotshouldstop.Usetheobstaclecoursefromtheconstructionsetforthistask.
Programming Tips:
Usetheobstaclecoursefromtheconstructionsettotesttheblacktrail.
SetthecamerasothatthetrailisinproperfocusintheROBOProcamerawindow.
Usethecamera"Line"sensorfieldfordetectingthetrail.Itconsistsofastraightlineinthecameraimage,locatedacrosstheimagefromlefttorightwithascalefrom-100to+100.0ispreciselyinthemiddle.

TXT Discovery Set
ROBOTICS
31
Furtherinformationonthecamera"Line"sensorfieldisgiveninROBO Pro HelpChap.11.
Nowyoucancheckthepositionofthetrailinyourprogram.
▯ Ifitislocatedbetween–10and+10therobotshouldmovestraightahead(M1andM2=left:v=5)
▯ Between–11and–40itshouldcorrectslightlytotheleft(M1left:v=5,M2left:v=2)
▯ Between+11and+40itshouldcorrectslightlytotheright(M1left:v=2,M2left:v=5)
▯ Atvalues<–40itshouldcorrectstronglytotheleft(M1left:v=5,M2right,v=3)
▯ Atvalues>+40itshouldcorrectstronglytotheright(M1right:v=3,M2left,v=5)
▯ Ifitloosesthetrail,itshouldstop.
Youcanfindthefinishedprogramhere:
Yourrobotcannowreact.Howeveritwouldbeevenbetterifyourrobotwouldturnaroundattheendofthetrailinsteadofjuststopping.
Trail_searcher_1.rpp

TXT Discovery Set
ROBOTICS
32
Task 2: Turning around at the end of the trail and following it back
Expandyourprogramtoincludeafunction,sothatwhentherobotgetsoffthetrailitturnsaroundandreturns.
Programming Tips:
Thereareseveralpossibilitiesforcorrectingthedirection.Youcanstoponemotorandlettheotheronecontinuetorunorhaveonemotorrotateoppositethedirectionofmovement.Experimenttodeterminewhichmethodisbetter.
Hereisoursuggestedsolution:
So!Nowyourrobotcanmoveonvisual"rails".Theonlydisadvantageisthatyoufirsthavetosetitontherail.Wewanttochangethis.Therobotshouldsearchforitstrailonitsown.
Task 3: Finding the trail and following it
Writea"search"subroutinetomaketherobotsearchforablacktrailifitdoesnotfindonewhentheprogramstarts.Forthispurpose,therobotistofirstmoveinacircleforonetime.Ifitdoesnotfindatrailwhenitdoesthisitshouldmovestraightaheadforashortdistance.Assoonastherobotdetectsatrail,itshouldfollowit.Ifthisdoesn't,thesearchshouldstartoverfromthebeginning.Afterithasmovedinacircle10timeswithoutfindingatrail,itshouldstopandflashthreetimes.
Programming Tips:
Incaseyouarenotexactlyontherighttrail,hereisoursuggestedsolution:
Trail_searcher_2.rpp
Trail_searcher_3.rpp

TXT Discovery Set
ROBOTICS
33
Detection Robot
Onthismodelwenowwanttocombineanumberofcamerafunctions.Therobotshouldbeabletolookforwardtodetectitssurroundings,howeveritshouldalsobecapableoflookingdownandfollowingthevariouscoloredtrailsontheobstaclecourseincluded.Moreoveritshouldalsocollectthe"temperaturedata"foritssurroundingsusingitsNTCthermistor.
First,buildthemodelasdescribedintheassemblyinstructions.
Task 1: The robot should function as follows:
Firstplaceitontheblacktrail.Itshouldmovealongittoitsend.Thenitshouldturnaroundandmoveintheoppositedirection.Afterreachingtheendoftheblacktrailwherethetrailiswider,itshouldraisethecameraandlookforward.Ifyouthenholdaredorgreencardinfrontofit,itshouldfirstfollowtheblacktrailandthenturnontotheredorgreentrail.Beforemovingoff,itagainmeasurestheambienttemperatureandsendsittotheTXTControllerdisplay.
Youcancutthesmallcoloredcardsoutofthelargecuttingtemplateintheconstructionset
Programming Tips:
ThisprogramisintendedtoshowyoueverythingthatispossiblewithROBOPro.Sinceweknowthatprogrammingisnotallthatsimple,justloadthepreparedprogramandtryitout:
Task 2:
The"Trail"subroutineisresponsibleforcontrollingtheencodermotorwhilefollowingatrail.Compareitwiththesubroutinefromthetrailsearchermodel.Whatdifferencesdoyousee?
Detection_robot.rpp

TXT Discovery Set
ROBOTICS
34
Solution:
Thesubroutineforthedetectionrobotisconsiderablymorecomplicatedthanforthetrailsearcher.Itcontainsacontrolfunctionwhichmakesthedegreetowhichthedirectioniscorrecteddependentonthedistancefromthemiddleofthetrail.Incomparison,thetrailsearcherdifferentiatedonlybetweenstraightahead,minorcorrectionandmajorcorrection.Creatingsuchacontrolfunctionrequiresagreatdealofprogrammingexperience(suchasourprofessionalprogrammershave).Butthecontrolresultsarealsosignificantlybetterthanwiththetrailsearchermodel.Inthefutureyoucansimplyusethissubroutineforyourownprograms,andbehappythatitworkssowell.
Task 3:
Ifyouhaveasmartphone(withAndroidoperatingsystem),youcanuseittocontrolthedetectionrobot.YoucandownloadtheappforthisfromtheGooglePlaystore.Itiscalled"TXTCamdroid“.ConnecttheTXTControllertoyoursmartphoneviaWLANtogetstarted.Youcanseewhatthecameraseesonyoursmartphonedisplay.Youcancontrolthemodelwithdifferentkeysandsenditondiscoverytrips.Havefun!
TXT Discovery Set
ROBOTICS
35
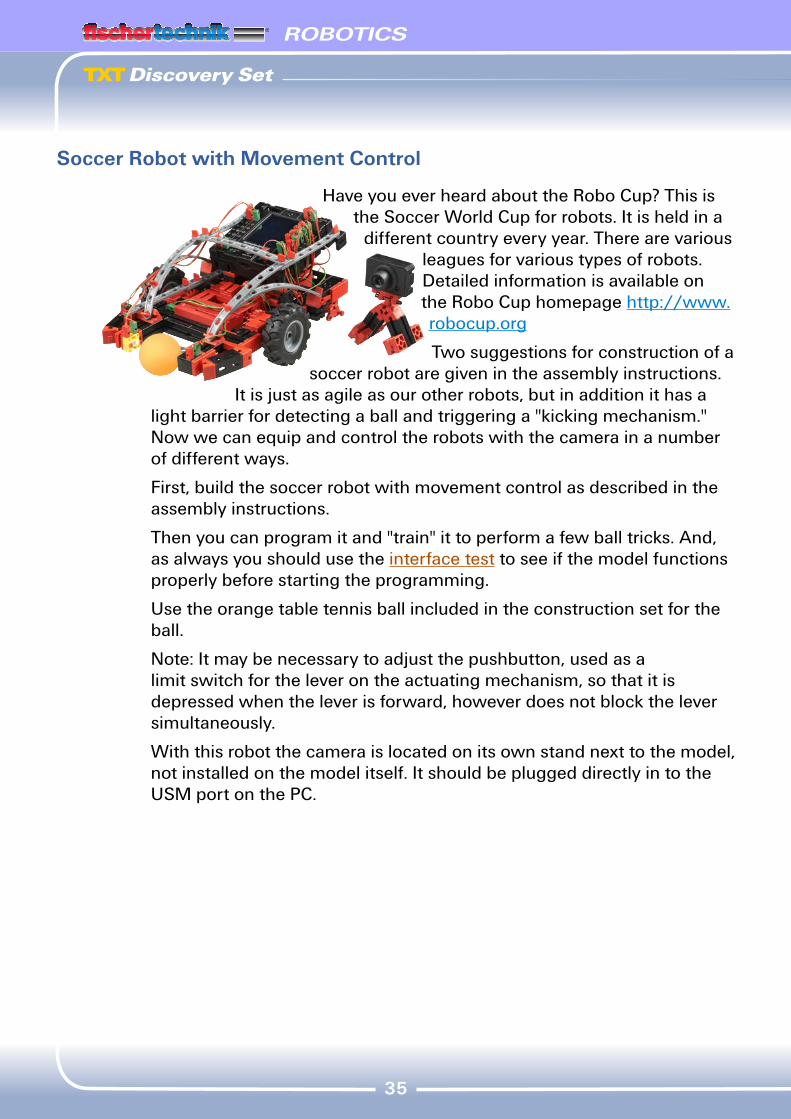
Soccer Robot with Movement Control
HaveyoueverheardabouttheRoboCup?ThisistheSoccerWorldCupforrobots.Itisheldina
differentcountryeveryyear.Therearevariousleaguesforvarioustypesofrobots.DetailedinformationisavailableontheRoboCuphomepagehttp://www.robocup.org
Twosuggestionsforconstructionofasoccerrobotaregivenintheassemblyinstructions.
Itisjustasagileasourotherrobots,butinadditionithasalightbarrierfordetectingaballandtriggeringa"kickingmechanism."Nowwecanequipandcontroltherobotswiththecamerainanumberofdifferentways.
First,buildthesoccerrobotwithmovementcontrolasdescribedintheassemblyinstructions.
Thenyoucanprogramitand"train"ittoperformafewballtricks.And,asalwaysyoushouldusetheinterface testtoseeifthemodelfunctionsproperlybeforestartingtheprogramming.
Usetheorangetabletennisballincludedintheconstructionsetfortheball.
Note:Itmaybenecessarytoadjustthepushbutton,usedasalimitswitchfortheleverontheactuatingmechanism,sothatitisdepressedwhentheleverisforward,howeverdoesnotblocktheleversimultaneously.
Withthisrobotthecameraislocatedonitsownstandnexttothemodel,notinstalledonthemodelitself.ItshouldbepluggeddirectlyintotheUSMportonthePC.

TXT Discovery Set
ROBOTICS
36
Task 1: "There, he has the ball and shoots . . ."
Thefirststepistoteachtheelectronicballwizardtoshoottheballassoonasitisdetectedbythelightbarrier.Experimentalittlewiththe"shootingspeed."Ashortpausebetween"detection"and"shooting"maypossiblyleadtoanimprovement.
Programming Tips:
ForthistaskitisfirstnecessarytoconnecttheTXTControltoyourPCusingtheUSBcable.Aswiththehanddryeryoushouldwaitafewsecondsafterthelens tip lampswitchesonbeforecheckingthephototransistoronthelightbarrier.
Beingatrainerisnoteasy.Ifyourrobotplayerdoesnotobeyyou,perhapsyoucangetitsattentionwithourprogramsuggestion.
Butsincearealballwizardshouldbeabletodomorethanjustapenaltyshootout,wewanttoexpandthecapabilitiesofoursoccerrobotabit.
Task 2: Motion control for soccer robot
Nowwewanttoprogramthesoccerrobottoreacttomotionsyoumakeinfrontofthecamera.Whenyouwavewithyourlefthand,itshouldmovetotheleft;ifyouwavewithyourrighthanditshouldturntotheright.Ifyouwavewithbothhandsinthemiddleoftheimage,itshouldmovestraightahead.Whenthelightbarrierdetectstheball,itshouldshoot,naturallyintothegoalifpossible.
Programming Tips:
Note:ForthistaskitisnecessarytoconnecttheTXTControltoyourPCviaWLANorBluetooth.
Eventhoughthistaskmaysoundsomewhatdifficultinitially,youhavealreadyusedmostofthefunctionsforthisprogramwithyourotherrobots.
Soccer_robot_movement_control_1.rpp

TXT Discovery Set
ROBOTICS
37
Usethreecamera"Motion"sensorfieldsforcontrolofthemotion.Positiononeoftheseinthemiddleofthecameraimage,oneontheleftandoneontheright.Placethecamerainfrontofyourmonitorwhereyoucaneasilyreachthethreeareasinthecamerawindowwithyourarmswithoutthesensorfieldsreactingunintentionally.Forthispurposeplacethefieldspreferablyintheupperhalfofthecamerasurface.
Thensimplyhaveyourprograminterrogatethethreesensorfieldstodeterminewhichofthefieldshasdetectedmotionandactuatetherobotaccordinglytomovetotheleft,rightorstraightahead.YouhavealreadyprogrammedtheshootingmechanisminTask1.Youcanintegratethisintoyourprogram.
ThenstarttheprogramintheROBOProonlinemode.ThecameraimageistransferredtothePCovertheUSBinterface;therobotcontroliswirelessviaBluetoothorWLAN.
Forthismodelyouonlyneedthegoalfromthesoccerstadiumincludedwiththeconstructionset.Youcouldalsousethe"sideboards"tokeeptheballfromrollingaway.Howevertheyareactuallyrequiredfororientationoftherobotonlyafterbuildingthenextmodel.Andnow,havefun"waving"andshootinggoals.
Onceagainwealsohavearecommendedsolutionforthisprogram.
*seealsoROBO Pro Help,Chap.11.
Soccer_robot_movement_control_2.rpp

TXT Discovery Set
ROBOTICS
38
Soccer Robot
Althoughitisveryamusingtocontrolthesoccerrobotbywavingyourarms,arealsoccerrobotshouldbeabletokicktheballintothegoalbyitself.Nowwewanttoteachhimtodothisbyinstallingthecameradirectlyontherobot.
Onceagaintheassemblyinstructionsdescribehowtodothis.
ConnectthecameratotheUSB-1interfaceontheTXTController.
Theentiresoccerstadiumisrequiredforthismodel.Itconsistsoftheunprinted,whiterear,youalreadyusedfortheobstaclecourseforthetrailsearcherandthedetectionrobotaswellasthesideboardsprintedwithblackstripesandthegoal.
Therobotneedsthepurewhitebackgroundtodetecttheorangeballwiththecamera"Ball"sensorfield.
Theblackstripesonthesideboards,whichhaveadifferentappearanceoneachside,allowtherobottodetectwhereitisontheplayingfieldandwherethegoalis.Thestripesontherearwallofthegoalshowtherobotwheretoshoot,whenithastheball.
Task 1:
Aswiththedetectionrobot,thisrobotisnoteasytoprogram.ThereforestartbytryingouttheprogramprovidedbyloadingitontheTXTController.
Hereisoursuggestedsolution:
Tips:
Adjustthelensonthecamerasothatthestripesonthegoalsideboardsinthestadiumarefocusedwhentherobotisattheoppositeendofthestadium.
Soccer_robot.rpp

TXT Discovery Set
ROBOTICS
39
Positiontherobotinthestadiumandthenthrowaballontotheplayingfield.Therobotwillsearchfortheball,attempttocatchitandshootitinthedirectionofthegoalassoonasithasturnedtofacethegoal.Withalittlelucktherobotwillshoottheballintothegoal.
Task 2:
TrytounderstandhowtheballdetectionworksbasedonthedescriptionintheROBOProhelp.
Solution:
The"Ball"sensorfielddetectsacoloredballonthewhitebackground.Itoutputsthepositionofthecenterpointoftheballinthesensorfield.SeealsoROBO Pro Help,Chap.11.
Similartothetrailsearcher,0isexactlyinthemiddlebetweenrightandleft.Intheverticaldirectionthevaluegoesfrom0toanautomaticallycalculatedmaximumheight.Therobotselectsitsdirectionofmotiondependingonwheretheballislocated.

TXT Discovery Set
ROBOTICS
40
Task 3:
Whichcamerasensorelementdoestheprogramusetoevaluatestripesonthesideboards?
Solution:
The"line"sensorelementisused.Incontrasttothetrailsearcher,threelinesensorsarelocatedfromtoptobottominthecamerawindowtodetectthethreehorizontalstripesonthesideboards.Therobotusestheirwidthtocalculatewhereitispresentlylocatedandwhereitneedstomoveto.
Moreoverthestripesallowittorecognizewhenitistooclosetothesideboardandtostopbeforecollidingwiththesideboard.
Task 4:
Two"Exclusion"sensorfieldsarepresentintheROBOProcamerawindowforthisrobot.Canyouimaginewhatthesearefor?
Solution:Thesesensorfieldssupplementthesensorfieldforballrecognition.Theexclusionareasarenotevaluatedwhenlookingfortheball.Thiscanbehelpful,whenobjectssuchasthephototransistorforthesoccerrobotarelocatedintheimageandcouldbemistakenfortheball.

TXT Discovery Set
ROBOTICS
41
How does the robot find its way around the playing field?
Maybeyouhavewonderedhowtherobotfindsitswayaroundtheplayingfieldusingthestripecodesonthesideboards.Asamatteroffact,thisisnotasimpleoperation,butitworksaccordingtothefollowingprinciple.
Infacttherobotiscapableofdeterminingitspositionontheplayingfieldtoanaccuracyofapproximately2 cmandanangleofapprox.5degreesbasedonthesideboards.Forthispurposetherobotmeasurestheheightofthesideboardsatvariouspointsandusesthisheighttocalculatethedistancesandthenfinallytheangleandabsoluteposition.Thisprocessisknownastriangulation.
Thesideboardsalwayshave3blackstripeswith2whitestripesinbetween.Oneoftheblackstripesiswiderthantheotherstripes.Thisallowstherobottorecognizewhichsideboardiswhich.Alltotaledthereare5differentsideboardpatterns,oneforeachsideoftheplayingfieldandoneforthegoal.
Moreovertherobotusesthecountingpulsesfromtheencodermotorstocalculatethepositionandanglebetweentriangulationoperations.
Thisprocessisknownasodometry.Odometryismorepreciseforshorttimesanddistances.Howeverithasthedisadvantagethaterrorsaccumulateinthecourseoftime.Forthisreasonthedataobtainedbyodometryiscorrectedusingthedatafromtriangulation.
Thesoccerrobotprogramhastwosubroutinesforthesecalculations:thetriangulationandodometrysubroutines.Ifyouwouldlike,takeacloserlookatthem.Butdon'tbealarmed!Theylookprettycomplicated;andtheyare.
Ifeverythinglookstootheoreticalforyou,don'tworry.Simplyusetheprogramprovided,beamazedathowitworksandmakeabetwithyourfriends,howmanytimestherobotwillhavetotrybeforemakingagoal.
TXT Discovery Set
ROBOTICS
42
Here are a few more tips on the playing field:
Ensurethatalargegapisnotpresentbetweenthefloorandthesideboards.Otherwisethecameracouldthinkthegapisastripeandthecalculationofthepositionwouldbewrong.
Topreventthisitisimportantforyoutofoldtheedgesexactlyandensurethattheplayingfieldisplacedonalevelsurface.Inadditionyoucanalsoplacebooksorotherobjectsalongtheoutsidesofthesideboardstohelpholdthemdown.
Iftheballcontinuouslyrollstowardonecornerorfrequentlystopsagainstoneofthesideboards,youcanleveltheplayingfieldbyplacingflatobjectssuchasnewspapers,schoolnotebooks,cardboard,etc.underthecornerssotheballwillrollbacktothemiddleinsteadofstoppingagainstthesideboard.Thiswillputmoreactionintothegame!

TXT Discovery Set
ROBOTICS
43
Trouble Shooting
Ifthingsdon'tworkrightfromtheverystartthereisusuallyasimplereason.But,itisnotalwayseasytofind.That'swhywewanttogiveyousomeinformationhereaboutpossiblesourcesoferrors.
Interface Test
Onceagainhereouradvice:CheckeachindividualcomponentforproperfunctionwiththeaidoftheROBOProinterface tests.
Cables and Wiring
Ifanelectricalcomponentdoesnotworkatall,checkthecableusedtoconnectittotheROBOTICSTXTControlleragain.Forthispurposeusethecabletoconnectthelenstiplamptothebattery.Ifthebulblightsupthecableshouldbeokay.
Anothersourceoferrorsareincorrectlyinstalledplugs(forexample,agreenplugonaredcable).
Alsocheckthat"+"and"-"arecorrectlyconnected.Forthispurpose,compareyourmodelwiththeillustrationsintheassemblyinstructions.
Loose Connection
Acomponent,whichworkssometimesanddoesn'tworkatothertimes,probablyhasalooseconnectionsomewhereinthewiringforthecomponent.
The most frequent causes for this are:
▯ LoosePlugs
Whentheplugsforthecablesaretooloose,thatiswobblyinthejacksockets,theydonotprovidesufficientcontact.Inthiscaseyoucancarefullybendthecontactspringsapartatthefrontontheaffectedconnectorsusingascrewdriver.Justalittle,sotheplugsareheldfirmlyinthejacksocketswhenyouplugthemin.
▯ PoorContactbetweenCableandPlug
Alsocheckthecontactbetweenthestrippedendsofthecableintheconnectorandtheconnectoritself.Itmaybesufficienttotightenthescrewsintheconnectorslightly.

TXT Discovery Set
ROBOTICS
44
Short Circuits
Whenapositiveandnegativeconnectiontouchoneanotheryouhaveashortcircuit.ThebatteryaswellastheROBOTICSTXTControllerhaveabuilt-infusetokeepthemfrombeingdamagedbyashortcircuit.Theysimplyswitchoffthepowersupplyforawhile.Naturally,yourmodelwillnotworkanymoreeither.
Thecauseforashortcircuitcanbeeitheramistakeinthewiringorscrewswhichhavenotbeentightenedsufficientlyintheconnectors.Theycantouchwhentheconnectorsarepluggedin,causingashortcircuit.That'swhyyoushouldalwayscompletelyscrewinthescrewsandplugintheplugssothatthescrewscannottoucheachother.
Power Supply
Shortinterruptionsormotors,whichruntooslowly,usuallyindicatealowbattery.Inthiscase,youshouldchargetherechargeablebatterywiththebatterycharger.ThebatteryiscompletelychargedwhentheredLEDonthechargerstopsflashingandilluminatescontinuously.
Errors in the Program
Evenifnoonelikestoadmitit:Everyonemakesmistakes.Andespeciallywithcomplexprograms,anerrorcancreepinquitequickly.
Ifyourmodelstilldoesn'tdowhatyouwantittoafteryouhavecheckedeverythingonthemodelitselfandhaveremediedanyfaults,youshouldalsocheckyourprogram.Gothroughitlineforlinetoseeifyoucanfindtheerror.
Youcanalsowatchtheprogramrunningonthemonitorintheonlinemode,whichmeanswiththeROBOTICSTXTControllerconnectedtothePC.Theprogramelementactiveatanygivenmomentishighlightedallowingyoutoalwaysseethepointwheretheprogramisandwheretheerroroccurs.
Camera Function
Thecameraworksbestwhenthelightisgood.
Light too low:Itcannotrecognizecolorormotioninthedark.
Remedy:LEDstoilluminatethecamerafieldofvision.
Light too bright:Excessivelight-directsunlightforexample-changesthecolorvalueandcontrastsothatthelinedetectorcannolongerrecognizethelinessatisfactorily.

TXT Discovery Set
ROBOTICS
45
Remedy:Avoiddirectsunlightorreducethelightbypullingthedrapesorclosingtheshutters.
Other remedies:Usethesoftwaretoadaptthecameraproperties.ThiscanbeaccomplishedwiththeROBOProsoftwareinthepropertyfieldsforthecamerasensors.Hereitispossible,forexample,tosetthesensitivityforrecognitionofanobjectandadaptittothesurroundings.DetailsaregiveninROBOProHelpChapter11.
Last Sources for Help
If,inspiteofallthis,youhavenotfoundtheerror,therearestilltwopossibilitiesforobtaininghelp:
▯ EmailHelp
Sendanemailtofischertechnikdescribingtheproblem.
Ouremailaddressis:[email protected].
▯ InternetHelp
YoucanalsovisitourwebsiteontheInternetathttp://www.fischertechnik.de.Thesiteincludesaforumwhereyouarecertaintofindhelp.Inaddition,youcanalsobecomeamemberofthefischertechnikFanClubatnocharge.

TXT Discovery Set
ROBOTICS
46
And what else can I do?
Wasthateverything?No,ofcoursenot.Theexperimentsandmodelsyoutriedoutinthisbookletshouldonlybethebeginning.Your"firstattemptstowalk"sotospeakinthegiganticandexcitingrealmof"ROTBOTICS".
WhatwehaveshownyouhereisonlyaverysmallportionofthepossibilitiesofferedbyyourROBOTICSTXTControllerandthefischertechnikcomponents.Andnowitisyourturn.Youcangiveyourfantasyfreereinandsimplybuildwhatyoufeellike.
Ifyoudon'thaveanyideasforyourowncompletemodelthenjusttakealookatthemodelsinthisbooklet.Perhapssomethingwilloccurtoyouhowtobuildamodeldifferently.Oryoucanchangethefunctionofamodel.
Forexampleyoucouldfastenapentothemobilerobot,sothatitcanbemovedupanddownallowingittowriteonalargepieceofpaperwhiletherobotismovingacrossit.Thenyoucandrawthefigurestherobotmovesthrough.Thisturnsyourmobilerobotintoadrawingmachine.
Youcanalsouseathickfelt-tippentodrawyourownobstaclecourseonapieceofpaperandhavetherobotmovethroughit.AndifyourfriendshaveaROBOTICSTXTController,youcandoevenmoreinterestingthings.Youcanrunracestoseewhoserobotcanmasteragivenobstaclecoursefaster.And,inadditiontoallowingyourPCtocommunicatewiththeROBOTICSTXTController,theBluetoothinterfacecanalsobeusedtoconnectanumberofcomputerswithoneanother.Then,forexample,youcouldprogramtworobots,toreacttooneanother.Ordancewitheachother.AgreatdealofinterestinginformationonthissubjectisgiveninChapters4.5and7intheROBO Pro Help.
Not finished yet
Fantasy
Changing the present
Drawing machine
Racing with friends

TXT Discovery Set
ROBOTICS
47
DoesyourcomputerhaveaWLANinterface?IfsoyoucanconnecttheROBOTICSTXTControllertothecomputerusingWLANinsteadofaUSBcable.Ifnot,youcanbuyaUSBWLANstickanduseitforwirelessconnectionbetweenyourROBOTICSTXTControllerandPC.ThisisdescribedintheinstructionmanualfortheROBOTICSTXTControllersandathttp://www.fischertechnik.de.
So,whatareyouwaitingfor?Getstarted!Inventandexperiment!Anddon'tbebotheredbylittlesetbacks.Patienceandperseveranceareprimaryfactorsforexperimenting.Therewardafterthisisafunctioningmodel.
Wehopeyouhavelotsoffuntryingoutyourownideas.
Wireless freedom
Persistence pays off

robotics roboticsBauanleitungAssembly instructionInstructions de montageBouwhandleidingInstrucciónes de construcciónManual de montagemIstruzioni di montaggioИнструкция по сборке安装说明书
fischertechnik GmbHKlaus-Fischer-Straße 172178 WaldachtalGermany
Phone: +49 74 43/12-43 69Fax: +49 74 43/12-45 91
Discovery set Discovery set
154
520
- P
rinte
d in
Ger
man
y -
Tech
nisc
he Ä
nder
unge
n vo
rbeh
alte
n -
Sub
ject
to
tech
nica
l mod
ifica
tions