automatisme - grafcet...
TRANSCRIPT

Introduction 1
Automatisme - Grafcet
Introduction
Loıc CUVILLON
Ecole Nationale Sup erieure de Physique de Strasbourg
Ann ee universitaire 2007-2008
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 2
1 – Les systemes automatises de production . . . . . . . . . . . . . . . . . . 4
2 – Structure d’un SAP . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3 – Description du comportement de l’automatisme . . . . . . . . . . . . . . 14
4 – Realisation d’un automatisme . . . . . . . . . . . . . . . . . . . . . . . 24
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 3
☞ Bibliographie :
➠ Le GRAFCET 2eme edition, cepadues-edition, 1995
Auteurs issus de l’ADEPA, AFCET, Telemecanique.
➠ Cours en ligne de Patrick TRAU, IPST :
http ://www-ipst.u-strasbg.fr/supports-de-cours/
➠ Version electronique de ce cours :
http ://eavr.u-strasbg.fr/, section enseignement, FIP
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 4
1 – Les syst emes automatis es de production
☞ Systeme de production :
➠ But = apporter une valeur ajoutee a un ensemble des produits bruts pour obtenir
des produits de valeur superieure (produits finis ou produits intermediaires)
(finis ou intermédiaires)
exploitation,réglage,maintenance...
Produitset matériauxbruts
Système de production
Composants auxiliairs(eau, liquides de refroidissement,lubrifiants,...etc.)Energies
Déchets Nuisances
Produits élaborés
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 5
➠ Necessite differentes interventions humaines :
➛ Surveillance des machines
➛ Chargement, controle et dechargement des machines
➛ participation au procede de production
➛ reglage et maintenance
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 6
☞ Objectifs de l’automatisation des systemes de production :
➠ Reduction des frais de main d’oeuvre, economie de matiere et d’energie
➠ Suppression des travaux dangereux ou penibles
➠ Meilleure qualite du produit
➠ Ameliorer les performances −→ realiser des operations impossible a controler
manuellement ou intellectuellement
=⇒ Systemes automatises de production (SAP)
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 7
☞ Systemes automatises de production :
➠ SAP = une machine isolee ou une unite de production voire une usine ou un
groupe d’usines
➠ Un ensemble hierarchise de SAP forme un ensemble productif industriel (ilot,
cellule ou ligne de fabrication)
Energies
SAP 1
SAP 2 SAP 3
Informations 1
Informations 3Informations 2
Produitsentrants Produits + VA
déchets,nuisances
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 8
☞ Systemes automatises de production :
➠ Brasserie Kronembourg : 4500 E/S.
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 9
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 10
2 – Structure d’un SAP
☞ SAP comporte deux parties :
➠ Partie operative (PO)
➠ Partie commande (PC)
Consignes
avec d’autres partiescommandes
Visualisation
(finis)Produits + VA
Partie
commandeopérative
Partiede commande
ou états
Préactionneurs
CapteursComptes rendus
Ordres
Produits bruts
et communication
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA
Introduction 11
☞ Partie operative :
➠ Opere sur le produit brut afin d’obtenir un produit finis
➠ Composee de l’ensemble d’organes physique qui interagissent sur le produit
pour lui conferer une VA
➛ pre-actionneurs = relais de puissance entre la commande et les actionneurs
qui agissent et transforment le produit
➛ capteurs = recueillent les informations traduisant un changement d’etat du
procede
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 12
☞ PC ou systeme de controle/commande (SCC) :
➠ Emet des ordres vers la PO et recoit des comptes rendus en retour afin de
coordonner ses actions
➠ Composee de l’ensemble des moyens logiciels et d’informations concernant le
pilotage et la conduite du procede
➠ Elle coordonne
➛ le dialogue avec la machine = commande des actionneurs via les
pre-actionneurs et l’acquisition des signaux des capteurs
➛ le dialogue homme-machine = le personnel emet des consignes pour
exploiter, regler et depanner la machine
➛ le dialogue avec d’autres machines = afin de coordonner les machines
pouvant cooperer dans une meme production
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 13
☞ Exemple : ascenseur
➠ PO = ensemble electro-mecanique (cabine, moteur, portes)
➠ PC = boutons d’appels, la logique et les armoires
PC
voyant occupé, indiquel’étage où se trouve lacabine et le sens dudéplacement
Etage d’origine Boutons de commande
Etage destination
PO = cabine,moteur, portes
Ordre montée/descenteouverture/fermeture portes
Position, masse
Alarme surcharge,
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 14
3 – Description du comportement de l’automatisme
☞ Comment decrire l’automatisme (PC) qui gere le comportement global du systeme
et qui provoque (controle) les changements d’etats du produit ?
➠ Languages (outils) qui permettent la description d’un automatisme :
➛ languages litteraux
➛ symboliques
➛ graphiques
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 15
☞ Languages litteraux :
➠ Description litterale du comportement utilisant le language naturel −→ difficile et
ambigue pour des systemes complexes
➠ Exemple
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 16
☞ Outils symboliques :
➠ Variables ”Tout Ou Rien” (TOR)
➛ Suffisant pour des applications dont le comportement est facilement decrit a
l’aide des variables booleennes
➛ Exemples
➳ un capteur prend 2 etats : repos ou marche (actionne) et a chaqu’un de ces
etats correspond un signal de sortie de niveau determine
➳ une grandeur mesuree est analogique −→ on utilise un capteur a seuils
pour obtenir un signal TOR
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 17
Signal analogique
montéeSeuil à la
Seuil à ladescente
Signal TOR
➳ Perceuse :
Si c = 1 et d = 1 alors A+
lorsque a1 = 1 alors B+, R
lorsque b1 = 1 alors B-
lorsque b0 = 1 alors A-
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 18
➠ Fonctions logiques (algebre de Boole)
➛ permettent de manipuler les combinaisons de variables TOR
➛ fonctions de base : ET, OU, NON
➠ Fonctions combinatoires et sequentielles
➛ Lorsque a chaque combinaison des variables d’entree ne correspond qu’un
seul etat d’une variable de sortie −→ relation combinatoire
➛ Lorsque l’etat de la variable de sortie depend aussi des evenements
precedents −→ fonctions sequentielles (a memoire)
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA
Introduction 19
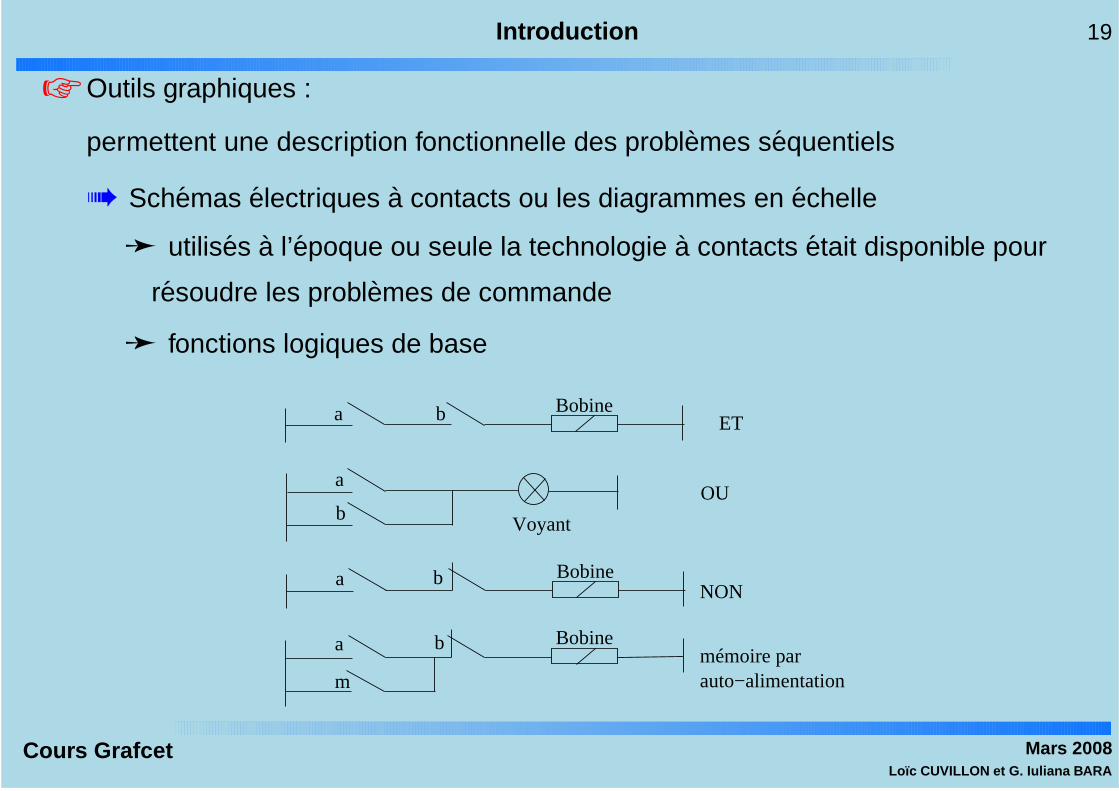
☞ Outils graphiques :
permettent une description fonctionnelle des problemes sequentiels
➠ Schemas electriques a contacts ou les diagrammes en echelle
➛ utilises a l’epoque ou seule la technologie a contacts etait disponible pour
resoudre les problemes de commande
➛ fonctions logiques de base
Voyant
Bobine
Bobine
Bobine
a b
a
b
a b
a b
m
OU
NON
mémoire parauto−alimentation
ET
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 20
➠ Logigrammes : representation graphique des fonctions logiques
Ou
>=1&
Et Not
➠ Chronogrammes : permettent de representer dans le temps l’evolution des
differentes variables
41 t3 t5 t6 t7 t8temps
B
A
t2 tt
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 21
➠ Organigrammes :
permettent de decrire sequentiellement les differentes commandes en precisant
au fur et a mesure les traitements a effectuer
➠ Diagrammes de phase
➠ GEMMA (Guide d’Etude des Modes de Marches et d’Arret) :
graphisme permettant de classifier les procedures de conduite et le dialogue
operateur relatif a un SAP (sans decrire reellement le contenu de la commande)
➠ Reseaux de Petri
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 22
➠ GRAFCET (GRAphe Fonctionnel de Commande Etape-Transition) :
➛ represente la succession des etapes dans le cycle
➛ l’evolution du cycle etape par etape est controlee par une transition disposee
entre chaque etape
➛ a chaque etape peut correspondre une action
➛ a chaque transition correspond une condition (receptivite)qui doit etre
satisfaite pour que la transition puisse etre franchie
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 23
➛ Exemple : perceuse
0
4
3
2
1
0
R
A
, B
B
A
+
−
+
−
appui opérateur de boutons (c,d)
pièce serrée (a1)
pièce percée (b1)
retour effectué (b )0
desserrage effectué (a )
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 24
4 – Realisation d’un automatisme
☞ Outils de realisation d’un automatisme :
➠ Technologies cablees :
➛ l’automatisme est realise par des modules raccordes entre eux
➛ le fonctionnement obtenu resulte du choix de ces modules et du cablage qui
les relie
➛ l’automatisme est entierement personnalise par sa realisation materielle
➛ elements permettant la realisation des automatismes cables :
– relais electromagnetiques
– modules logiques pneumatiques
– cartes ou modules electriques
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA

Introduction 25
➠ Technologies programmes :
➛ l’automatisme est realise par la programmation des constituants
➛ le fonctionnement obtenu resulte de la programmation effectuee
➛ l’automatisme est personnalise par le choix materiels mais aussi par la
programmation
➛ constituants programmables :
– cartes electroniques standards et specifiques
– micro et mini-ordinateurs
– automates programmables
Cours Grafcet Mars 2008Loıc CUVILLON et G. Iuliana BARA