ch. 4. the fourier transform
TRANSCRIPT

Signals & SystemsProf. M. Song
4.1 Introduction
4.2 The Continuous-Time Fourier Transform4.2.1 Development of the Fourier Transform4.2.2 Existence of the Fourier Transform4.2.3 Examples of the Continuous-Time Fourier Transform
4.3 Properties of the Fourier Transform4.3.1 Linearity4.3.2 Symmetry4.3.3 Time Shifting4.3.4 Time Scaling4.3.5 Differentiation4.3.6 Energy of Aperiodic Signals4.3.7 Convolution4.3.8 Duality4.3.9 Modulation
4.4 Applications of the Fourier Transform4.4.1 Amplitude Modulation4.4.2 Multiplexing4.4.3 The Sampling Theorem4.4.4 Signal Filtering
1
Ch. 4. The Fourier Transform
4.5 Duration Bandwidth Relationships4.5.1 Definitions of Duration and Bandwidth
4.5.2 The Uncertainty Principle
4.6 Summary

Signals & SystemsProf. M. Song
2
4.1 Introduction
§ Any periodic signal with period T can be decomposed in terms of harmonics related complex exponential. ð Fourier series
§ Consider the another powerful techniques, called the Fourier transform, for describing both periodic and non-periodic signals for which no Fourier series exists.
• Like the Fourier series coefficients, the Fourier transform specifies the spectral contents of a signal.
• Fourier transform is a valuable tool in the analysis of LTI system.

Signals & SystemsProf. M. Song
4.2 The Continuous-Time Fourier Transform (CtFT)
§ Fourier series is restricted to periodic inputs.
§ We will develop a method, the Fourier transform, for representing
aperiodic signals.
3

Signals & SystemsProf. M. Song
§ For given , consider the periodic signal
§ Fourier series representation
( ) ( )k
x t x t kT¥
=-¥
= -å%
( )x t ( )x t( )x t%
T ® ¥
[ ]0( ) expnn
x t c jn tw¥
=-¥
= å%
[ ]/ 2
0/ 2
1 ( )expT
n Tc x t jn t dt
Tw
-= -ò %
( )x t ( )x t%
4
4.2.1 Development of the Fourier Transform

Signals & SystemsProf. M. Song
• When ,T ® ¥
0 02 2, , ( ) ( )nd n x t x tT Tp pw w w w= ® = ® ®%
[ ]( ) ( )expX x t j t dtw w¥
-¥= -ò
[ ]( )exp2n t
dc x t j t dtw wp
¥
=-¥= -ò
( ) [ ] [ ]( )exp exp2t
dx t x t j t dt j tw
ww wp
¥ ¥
=-¥ =-¥
é ù= -ê úë ûò ò
[ ]0( ) expnn
x t c jn tw¥
=-¥
= å% [ ]/ 2
0/ 2
1 ( )expT
n Tc x t jn t dt
Tw
-= -ò %
( )X w
( ) ( ) [ ]1 X exp2
x t j t dw
w w wp
¥
=-¥= ò
Fourier Transform PairFourier Transform Pair

Signals & SystemsProf. M. Song
§ Fourier transform• Analysis equation
• Synthesis equation
• Notation
§ Spectrum
• Magnitude spectrum :
• Phase spectrum :
• Energy spectrum :
[ ]( ) ( )expX x t j t dtw w¥
-¥= -ò
[ ]1( ) ( )exp2
x t X j t dw w wp
¥
-¥= ò
{ } { }1( ) ( ), ( ) ( ) , ( ) ( )x t X X x t x t Xw w w-« = =F F
[ ]( ) ( ) exp ( )X X jw w f w=
( )X w
( ), ( )X w f wR2( )X w
6
* An aperiodic signal has a continuous spectrum rather than a line spectrum.

Signals & SystemsProf. M. Song
§ Fourier transform exists if x(t) is absolutely integrable.
• x(t) is energy signal if x(t) is absolutely integrable.
ð Energy signal has Fourier transform.
• Being absolutely integrable is a sufficient condition.− Power signals (unit-step signal, periodic signal) have Fourier
transforms.
− They are not absolutely integrable.
( )x t dt¥
-¥< ¥ò
4.2.2 Existence of the Fourier Transform
7

Signals & SystemsProf. M. Song
Rectangular pulse
§ Rectangular pulse ⇔ Sinc function
( ) rect tx tt
æ ö= ç ÷è ø
[ ] [ ]/ 2
/ 2
2( ) ( )exp exp sin2
X x t j t dt j t dtt
t
wtw w ww
¥
-¥ -= - = - =ò ò
( )x t
2t
2t
-
Ex. 4.2.1Ex. 4.2.1
4.2.3 Examples of the Continuous-Time Fourier Transform
8

Signals & SystemsProf. M. Song
Triangular pulse
| |1 , | |( )
0, | |
t ttx tt
tt
t t
ì - £ïæ ö= D = íç ÷è ø ï >î
[ ] 2 2
0( ) exp 2 1 cos sinc Sa
2 2t tX j t dt t dt
t wt wtw w w tt t p
¥
-¥
æ ö æ ö= D - = - = =ç ÷ ç ÷è ø è øò ò
2 2sinc Sa2 2
t wt wttt p
æ öD « =ç ÷è ø
0t
x(t)
Ex. 4.2.2Ex. 4.2.2
9

Signals & SystemsProf. M. Song
One-sided exponential signal
[ ]( ) exp ( )x t t u ta= -
[ ] [ ]
[ ]
[ ]0
0
( ) exp ( )exp
exp ( )
1 exp ( )( )
1
X t u t j t dt
j t dt
j tj
j
w a w
a w
a wa w
a w
¥
-¥
¥
¥
= - -
= - +
é ù= - +ë û- +
=+
òò
Ex. 4.2.3Ex. 4.2.3
10

Signals & SystemsProf. M. Song
Two-sided exponential signal
[ ]( ) exp | | , 0x t ta a= - >
[ ] [ ] [ ] [ ]
[ ] [ ]
0
00
0
2 2
( ) exp exp exp exp
exp ( ) exp ( )
1 1 2
X t j t dt t j t dt
j t dt j t dt
j j
w a w a w
a w a w
aa w a w a w
¥
-¥
¥
-¥
= - + - -
= - + - +
= + =- + +
ò òò ò
Ex. 4.2.4Ex. 4.2.4
11

Signals & SystemsProf. M. Song
Impulse function
§ Impulse signal consists of equal-amplitude sinusoids of all frequency.
{ } [ ]( ) ( )exp 1t t j t dtd d w¥
-¥= - =òF
( ) 1td «
[ ]1( ) exp2
t j t dd w wp
¥
-¥= ò
{ } [ ]1 1exp 2 ( )j t dtw pd w¥
-¥= - =òF
1 2 ( )pd w«
[ ]11 2 ( )exp2
j t dpd w w wp
¥
-¥= ò
Ex. 4.2.5Ex. 4.2.5
12

Signals & SystemsProf. M. Song
§ behaves like as an impulse at t=0
[ ]1 exp ( ) (0)2
j t d g t dt gw wp
¥ ¥
-¥ -¥
é ù Þê úë ûò ò
[ ] [ ]1 1exp ( ) ( )exp ( )2 2
1 ( )2
j t d g t dt g t j t dt d
G d
w w w wp p
w wp
¥ ¥ ¥ ¥
-¥ -¥ -¥ -¥
¥
-¥
é ù é ù= - -ê ú ê úë ûë û
= -
ò ò ò ò
ò
[ ]0
1 1 1( ) ( ) ( )exp (0)2 2 2 t
G d G d G j t d gw w w w w w wp p p
¥ ¥ ¥
-¥ -¥ -¥=
- = = =ò ò ò
[ ]1( ) exp2
t j t dd w wp
¥
-¥\ = ò
[ ](1/ 2 ) exp j t dp w w¥
-¥ò
Ex. 4.2.6Ex. 4.2.6
13

Signals & SystemsProf. M. Song
§ Exchange t and w in Eq. (4.2.11)
[ ] [ ]1 1( ) exp ( ) exp2 2
t j t d jt dtd w w d w wp p
¥ ¥
-¥ -¥= Þ =ò ò
[ ]2 ( ) 1exp 2 ( )j t dtpd w w pd w¥
-¥- = - =ò
1 2 ( )pd w«
Ex. 4.2.6Ex. 4.2.6
14

Signals & SystemsProf. M. Song
§ In Example 4.2.1
§ As , and
2( ) rect( / ) ( ) sin2
x t t X wtt ww
= « =
2lim sin 2 ( )2t
wt pd ww®¥
=
, ( ) 1x tt ® ¥ ® ( ) 2 ( )X w pd w®
Ex. 4.2.7Ex. 4.2.7
15

Signals & SystemsProf. M. Song
Exponential signal
[ ]0( ) expx t j tw=
[ ] [ ]
[ ]0
0
0
( ) exp exp
exp ( )
2 ( )
X j t j t dt
j t dt
w w w
w w
pd w w
¥
-¥
¥
-¥
= -
= - -
= -
òò
[ ]0 0exp 2 ( )j tw pd w w« -
Ex. 4.2.8Ex. 4.2.8
16

Signals & SystemsProf. M. Song
§ Fourier transform of a periodic signal• Periodic signal is a power signal.
• Its Fourier transform contains impulses.
• Its Fourier transform can be obtained from the Fourier series coefficients.
17

Signals & SystemsProf. M. Song
Periodic signal
§ Fourier series representation
§ Fourier transform
§ The Fourier transform of a periodic signal is an impulse train with impulses located at , each of which has a strength , and all impulses are separated from each other by .
02( ) ( ),x t x t TTpw= + =
[ ]0( ) expnn
x t c jn tw¥
=-¥
= å
[ ]{ }0 0( ) exp 2 ( )n nn n
X c jn t c nw w p d w w¥ ¥
=-¥ =-¥
= = -å åF
0nw w= 2 ncp
0w
Ex. 4.2.9Ex. 4.2.9
18

Signals & SystemsProf. M. Song
Impulse train
§ Fourier series coefficients
§ Fourier transform
( ) ( )n
x t t nTd¥
=-¥
= -å
1 2 1 2 1( )exp ( )expn T T
nt ntc x t j dt t j dtT T T T T
p pd< > < >
é ù é ù= - = - =ê ú ê úë û ë ûò ò1 2( ) exp
n
ntx t jT T
p¥
=-¥
é ù= ê úë ûå
2 2exp 2nt njT Tp ppd wé ù æ ö« -ç ÷ê úë û è ø
1 2 2 2expn n
nt njT T T T
p p pd w¥ ¥
=-¥ =-¥
é ù æ ö« -ç ÷ê úë û è øå å
2 2( )n
nXT Tp pw d w
¥
=-¥
æ ö= -ç ÷è ø
åImpulse
train
Ex. 4.2.10Ex. 4.2.10
19

Signals & SystemsProf. M. Song
§ If,
then 1 1 2 2( ) ( ), ( ) ( )x t X x t Xw w« «
1 2 1 2( ) ( ) ( ) ( )ax t bx t aX bXw w+ « +
4.3.1 Linearity
4.3 Properties of the Fourier Transform
20
§ Several useful properties of the Fourier transform allow some problems to be solved almost by inspection.

Signals & SystemsProf. M. Song
Sinusoidal signal
[ ] [ ]{ }1 0 0 01( ) cos exp exp2
x t t j t j tw w w= = + -
[ ] [ ]{ }2 0 0 01( ) sin exp exp
2x t t j t j t
jw w w= = - -
{ }2 0 0( ) ( ) ( )Xjpw d w w d w w= - - +
1 0( ) cosx t tw=
2 0( ) sinx t tw=
{ }1 0 0( ) ( ) ( )X w p d w w d w w= - + +
[ ][ ]
0 0
0 0
exp 2 ( )
exp 2 ( )
j t
j t
w pd w w
w pd w w
« -
- « +
Ex. 4.3.1Ex. 4.3.1
21

Signals & SystemsProf. M. Song
§ If x(t) is a real-valued time signal, then
<Proof>
§ The magnitude is an even function and the phase is an odd function.
*( ) ( )X Xw w- =
[ ]
[ ]{ }
[ ]{ }
*
*
*
( ) ( )exp ( )
( ) exp ( )
( )exp
( )
X x t j t dt
x t j t dt
x t j t dt
X
w w
w
w
w
¥
-¥
¥
-¥
¥
-¥
- = - -
= -
= -
=
òò
ò
[ ]( ) ( ) exp ( )X X jw w f w=
4.3.2 Symmetry
22[ ]*( ) ( ) exp ( )X X jw w f w= -
[ ]( ) ( ) exp ( ) ( ) ( ) , ( ) ( )X X j X Xw w f w w w f w f w- = - - Þ = - - = -

Signals & SystemsProf. M. Song
Real signal
[ ]
[ ] [ ]
[ ] [ ]
[ ] [ ] [ ] [ ]
{ }
0
0
0 0
0 0
1( ) ( )exp21 1( )exp ( )exp
2 21 1( )exp ( )exp
2 21 1( ) exp ( ) exp ( ) exp ( ) exp
2 2
set
1 ( ) exp ( ) exp2
x t X j t d
X j t d X j t d
X j t d X j t d
X j j t d X j j t d
X j t j t
w w wp
w w w w w wp p
q q q w w wp p
w f w w w w f w w wp p
w w f w w
w q
p
¥
-¥
¥
-¥
¥ ¥
¥ ¥
=
= +
= - - +
= - - +
é ù= + + - +
¬ -
û
=
ë
ò
ò ò
ò ò
ò ò
{ }( )
{ }
0
0
( )
1 2 ( ) cos ( )2
d
X t d
f w w
w w f w wp
¥
¥
é ùë û
= +
ò
ò
Ex. 4.3.2Ex. 4.3.2
23

Signals & SystemsProf. M. Song
Even and real-valued signal
[ ]
( )
0
( ) ( ) exp
( ) cos sin
( ) cos ( )sin
2 ( )cos
X x t j t dt
x t t j t dt
x t t dt j x t t dt
x t t dt
w w
w w
w w
w
¥
-¥
¥
-¥
¥ ¥
-¥ -¥
¥
= -
= -
= -
=
òòò òò
Ex. 4.3.3Ex. 4.3.3
24

Signals & SystemsProf. M. Song
§ If
then,
<Proof>
( ) ( )x t X w«
[ ]0 0( ) ( )expx t t X j tw w- « -
[ ]0 0( )exp ( )x t j t Xw w w« -
[ ] [ ]
[ ] [ ][ ]
0
0
0
00 set( )exp ( )exp ( )
exp ( )exp
ex
p ( )
tx t t j t dt x j t d
j t x j d
X
t
j t
w t w t t
w t wt
t
t
w w
¥ ¥
-¥ -¥
¥
-¥
- - = - +
=
¬ = -
- -
= -
ò òò
[ ] [ ] ( ) ( )0 0 0( )exp exp ( )expx t j t j t dt x t j t d Xw w w w t w w¥ ¥
-¥ -¥é ù- = - - = -ë ûò ò
Amplitude isnot changed
AM modulation
4.3.3 Time Shifting
25

Signals & SystemsProf. M. Song
§ If
then,( ) ( )x t X w«
1( )x t X waa a
æ ö« ç ÷è ø
0 00
0
0t
0
0
0
t
t
2 0
0/2
2 0
0/2
t0 t0
t0/2 t0/2
2t0 2t0
X
X
X
x t
x t
x t/2
4.3.4 Time Scaling
26

Signals & SystemsProf. M. Song
( ) rect , 0tx t aa at
æ ö= >ç ÷è ø
rect sinc rect sinc2 2
t twt a wtt a tt p t pa
ì ü ì üæ ö æ ö= Þ =í ý í ýç ÷ ç ÷è ø è øî þ î þ
F F
Ex. 4.3.4Ex. 4.3.4
27

Signals & SystemsProf. M. Song
§ If,
then
<Proof>
( ) ( )x t X w«
( ) ( )( ), ( ) ( )n
nn
dx t d x tj X j Xdt dt
w w w w« «
[ ]1( ) ( )exp2
x t X j t dw w wp
¥
-¥= ò
[ ] { }1( ) 1 ( ) exp ( )2
dx t X j j t d j Xdt
w w w w w wp
¥ -
-¥= =ò F
4.3.5 Differentiation
28

Signals & SystemsProf. M. Song
§ Integration
§ Problems• Differentiation operation destroys any dc component of y(t).
• X(0) must be zero. (See 166 page, )
§ When , we add a dc term , where c depends on the
average of x(t),
1( ) ( ) ( )t
y t x d Xj
t t ww-¥
= «ò( ) 1( ) ( ) ( ) ( ) ( ) ( ) ( )
t dy ty t x d x t X j Y Y Xdt j
t t w w w w ww-¥
= Þ = « = Þ =ò
(0) ( ) 0X x dt t¥
-¥= =ò
1( ) ( ) ( ) ( ) (0) ( )t
y t x d Y X Xj
t t w w p d ww-¥
= « = +ò
( ) (0)y X¥ =
(0) 0X ¹ ( )cd w
(0)c Xp=
29

Signals & SystemsProf. M. Song
Unit step function
§ Signum function
• sgnt has a zero dc component
§ Unit step function
1, 0sgn 0, 0
1, 0
tt t
t
- <ìï= =íï >î
sgn 2 ( ) sgn 2 ( )td t t t d
dtd d t t
-¥= Þ = ò
{ } { }1 2sgn 2 ( )t tj j
dw w
= =F F
1 1( ) sgn2 2
u t t= +
{ } { }1 1 1( ) sgn ( )2 2
u t tj
pd ww
ì ü= + = +í ýî þ
F F F
Ex. 4.3.5Ex. 4.3.5
30

Signals & SystemsProf. M. Song
§ Parseval's theorem
§ Parseval's relation for aperiodic signals.
<Proof>
2 21 ( ) nTn
x t dt cT
¥
< >=-¥
= åò
2 21( ) ( )2
E x t dt X dw wp
¥ ¥
-¥ -¥= =ò ò
[ ]
[ ]{ }
2 *
*
*
2
( ) ( ) ( )
1( ) ( )exp2
1 ( ) ( )exp21 ( )
2
E x t dt x t x t dt
x t X j t d dt
X x t j t dt d
X d
w w wp
w w wp
w wp
¥ ¥
-¥ -¥
¥ ¥
-¥ -¥
¥ ¥
-¥ -¥
¥
-¥
= =
ì ü= -í ýî þ
= -
=
ò ò
ò ò
ò ò
ò
4.3.6 Energy of aperiodic signals
31

Signals & SystemsProf. M. Song
§ Energy density spectrum
• Energy in the frequency band
§ Power density spectrum• Let x(t) be a power signal and define as
2( )( ) ( )
2X
E dw
w w wp
¥
-¥= Þ = òE E
1 2w w w£ £
2
1
( )E dw
ww wD = ò E
( )x tt
( ),( )
0, otherwisex t t
x tt
t t- < <ì= í
î
32

Signals & SystemsProf. M. Song
• The average power of x(t)
• Power density spectrum, power spectrum density (PSD)
⇒ PSD depends only on the magnitude of the spectrum.
221 1lim ( ) lim ( )2 2
P x t dt x t dtt
ttt tt t¥
- -¥®¥ ®¥
é ù é ù= =ê ú ê úë û ë ûò ò2
2
1 1lim ( )2 2
( )1 lim2 2
1 ( )2
P X d
Xd
S d
tt
t
t
w wt p
ww
p t
w wp
¥
-¥®¥
¥
-¥ ®¥
¥
-¥
é ùì ü= í ýê úî þë ûé ù
= ê úê úë û
=
ò
ò
ò
2( )( ) lim
2X
S t
t
ww
t®¥
é ù= ê ú
ê úë û
33

Signals & SystemsProf. M. Song
§ One-sided exponential signal
§ Energy density spectrum
§ Total energy
§ Energy in
⇒84.4 % of total energy
[ ]( ) exp ( )x t t u t= -
2
2
( ) 1 1 1( )1
( )2 2 1
XX
jw
ww
wp p w
= =+
¬ =+
E
2
1 1 1( )2 21
E d dw w wp w
¥ ¥
-¥ -¥= = =
+ò òE
12 2 2
1 1 1tan ,1
xdx C da ax a
w pw
¥-
-¥
ì ü= + =í ý+ +î þò òQ
( )4 4 1 124 0
1 1 1( ) 2 tan 4 tan 0 0.42202 1
E d dw w wp pw
- -
-D = = = - »
+ò òE
Ex. 4.3.6Ex. 4.3.6
34

Signals & SystemsProf. M. Song
§ If
then
<Proof>
( ) ( ), ( ) ( )x t X h t Hw w« «
( ) ( ) ( ) ( ) ( ) ( )y t x t h t Y X Hw w w= * « =
{ } [ ]
[ ]
[ ]
[ ]
( ) ( ) ( ) ( ) exp
( ) ( ) exp
( ) ( ) exp
( )exp ( )
( ) ( )
x t h t x t h t j t dt
x h t d j t dt
x h t j t dt d
x j H d
X H
w
t t t w
t t w t
t wt w t
w w
¥
-¥
¥ ¥
-¥ -¥
¥ ¥
-¥ -¥
¥
-¥
* = * -
é ù= - -ê úë ûé ù= - -ê úë û
= -
=
ò
ò ò
ò ò
ò
F
4.3.7 Convolution
35

Signals & SystemsProf. M. Song
§ Amplitude and phase spectrum of output signal
§ Hence, convolution in the time domain is equivalent to multiplication in the frequency domain, which, in many cases, is convenient and can be done by inspection.
( ) ( ) ( )Y X Hw w w=
( ) ( ) ( )Y X Hw w w= +R R R
36

Signals & SystemsProf. M. Song
LTI system[ ]( ) ( ), ( ) exp ( ) ( ) ??x t u t h t at u t y t= = - Þ =
1 1( ) ( ) , ( )X Hj j a
w pd w ww w
= + =+
{ } [ ]{ }
1 1( ) ( )
1( )( )
1 1 1( )
1 1 1 1( )
1 1( ) exp ( )
Yj j a
a j j a
a a j j a
a j a j a
u t at u ta a
w pd ww w
p d ww w
p d ww w
pd ww w
é ù é ù= +ê ú ê ú+ë û ë û
= ++
é ù= + -ê ú+ë û
é ù= + -ê ú +ë û
= - -F F
[ ]{ }1( ) 1 exp ( )y t at u ta
\ = - -
Ex. 4.3.7Ex. 4.3.7
37

Signals & SystemsProf. M. Song
Triangle signal
1( ) , ( ) rectt tz t x tt tt
æ ö æ ö= D =ç ÷ ç ÷è ø è ø
1( ) sinc2
X wtwt
=
2 22 1 1( ) ( ) sinc sinc
2 2Z X wt wtw w
ttæ ö æ ö= = = ç ÷ç ÷ è øè ø
( ) ( ) ( ) ( ) ??z t x t x t Z w= * Þ =
Ex. 4.3.8Ex. 4.3.8
38

Signals & SystemsProf. M. Song
LTI system
[ ] [ ] [ ]{ }( ) exp ( ), ( ) exp exp ( ) ( ) ??h t at u t y t bt ct u t x t= - = - - - Þ =
1( )Hj a
ww
=+
1 1( )Yj b j c
ww w
= -+ +
( )( )( )
1 1
Y j a j aXH j b j c
a b a c a b a cj b j c j b j c
w w www w w
w w w w
+ += = -
+ +- - - -
= + - - = -+ + + +
[ ] [ ]( ) ( ) exp ( ) ( ) exp ( )x t a b bt u t a c ct u t\ = - - - - -
Ex. 4.3.9Ex. 4.3.9
39

Signals & SystemsProf. M. Song
Integration
( ) ( ) ( ) ( )t
y t x d x t u tt t-¥
= = *ò1( ) ( )Uj
w pd ww
= +
1 ( )( ) ( ) ( ) ( ) ( ) (0) ( ) XY X U X Xj j
ww w w w pd w p d ww w
é ù= = + = +ê ú
ë û
Ex. 4.3.10Ex. 4.3.10
40

Signals & SystemsProf. M. Song
§ Energy spectrum density of the response of an LTI system
• The phase characteristics of the system does not affect the energy
spectrum density of the output.
2 2 2 2( ) ( ) ( ) ( ) ( )Y X H X Hw w w w w= =
41

Signals & SystemsProf. M. Song
§ If
then
<Proof>
( ) ( )x t X w«
( ) 2 ( )X t xp w« -
{ } [ ]
[ ]
( ) ( ) exp
12 ( )exp ( )2
2 ( )
X t X t j t dt
X t jt dt
x
w
p wp
p w
¥
-¥
¥
-¥
= -
é ù= -ê úë û= -
ò
ò
F
4.3.8 Duality
42

Signals & SystemsProf. M. Song
§ Time limiting and frequency limiting are mutually exclusive.• If x(t) is time limited, then X(w) is never band limited.
• If X(w) is band limited, then x(t) is never time limited.
rect sinc2
t twtt p
«
2sinc rect2
B
B B
tw p wp w w
«
Ex. 4.3.11Ex. 4.3.11
43

Signals & SystemsProf. M. Song
[ ]( ) ( ) expX x t j t dtw w¥
-¥= -ò
[ ] { }( ) ( )( ) exp ( ) ( )dX x t jt j t dt jt x td
w ww
¥
-¥= - - = -ò F
( )( ) ( ) dXjt x td
ww
\ - «
( )( ) ( )n
nn
d Xjt x td
ww
\ - «
Ex. 4.3.12Ex. 4.3.12
44

Signals & SystemsProf. M. Song
§ If,
then
( ) ( ), ( ) ( )]x t X m t Mw w« «
[ ]1 1( ) ( ) ( ) ( ) ( ) ( )2 2
x t m t X M X M dw w s w s sp p
¥
-¥« * = -ò
{ } [ ]
[ ] [ ]
[ ]
[ ]
( ) ( ) ( ) ( ) exp
1 ( )exp ( )exp2
1 ( ) ( ) exp ( )21 ( ) ( )
21 ( ) ( )
2
x t m t x t m t j t dt
X j t d m t j t dt
X m t j dt d
X M d
X M
w
s s s wp
s w s sp
w w s sp
w wp
¥
-¥
¥ ¥
-¥ -¥
¥ ¥
-¥ -¥
¥
-¥
= -
é ù= -ê úë û
é ù= - -ê úë û
= -
= *
ò
ò ò
ò ò
ò
F
4.3.9 Modulation
45

Signals & SystemsProf. M. Song
§ AM modulation
( ) ( )x t X w«
[ ]0 0 01( )cos ( ) ( )2
x t X Xw w w w w« - + +
46

Signals & SystemsProf. M. Song
Sampling signal
§ Periodic impulse train
§ Sampled signal
2 2( ) ( ) ( )n n
np t t nT PT Tp pd w d w
¥ ¥
=-¥ =-¥
æ ö= - « = -ç ÷è ø
å å
( ) ( ) ( )sx t x t p t=
[ ]1( ) ( ) ( )21 2( )
1 2
s
n
n
X X P
nXT T
nXT T
w w wp
pw d w
pw
¥
=-¥
¥
=-¥
= *
æ ö= * -ç ÷è ø
æ ö= -ç ÷è ø
å
å
Ex. 4.3.13Ex. 4.3.13
47

Signals & SystemsProf. M. Song
§ consists of a periodically repeated replica of
2Tp 4
Tp2
Tp
-4Tp
-
1T
( )sX w ( )X w
48
Ex. 4.3.13Ex. 4.3.13
Signals & SystemsProf. M. Song
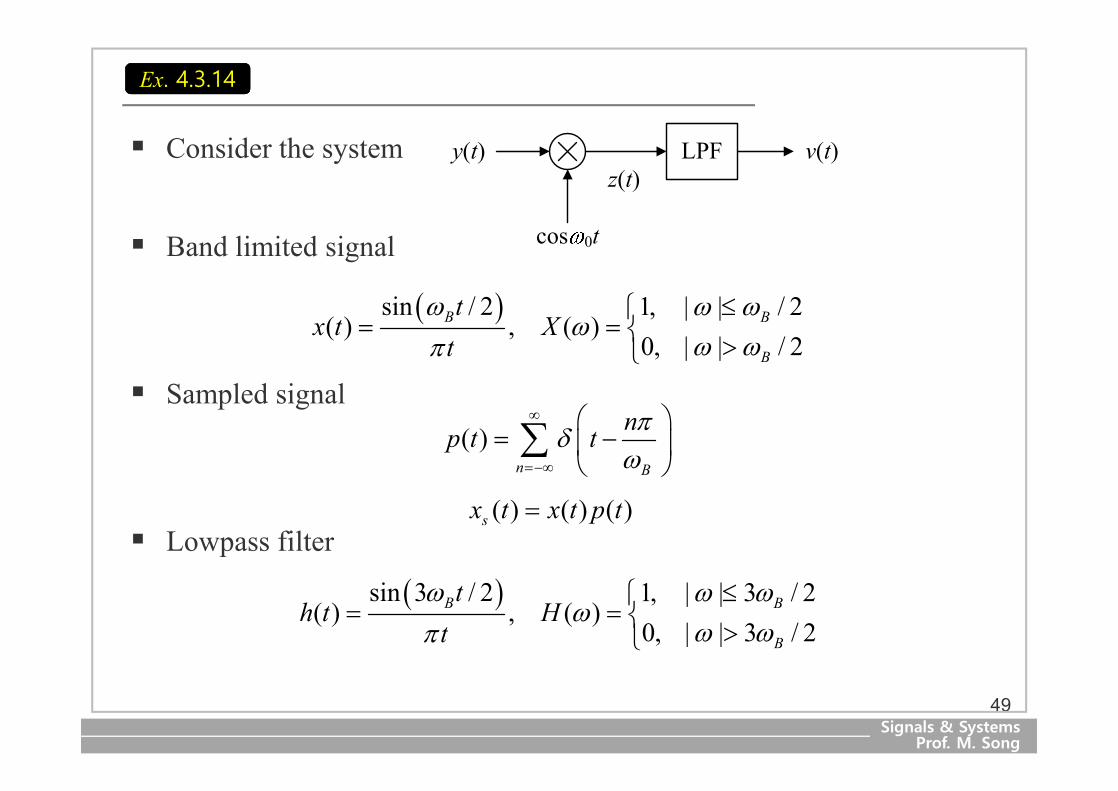
§ Consider the system
§ Band limited signal
§ Sampled signal
§ Lowpass filter
LPFy(t)
cos 0t
v(t)z(t)
( )sin / 2 1, | | / 2( ) , ( )
0, | | / 2B B
B
tx t X
tw w w
ww wp
£ì= = í >î
( )n B
np t t pdw
¥
=-¥
æ ö= -ç ÷
è øå
( ) ( ) ( )sx t x t p t=
( )sin 3 / 2 1, | | 3 / 2( ) , ( )
0, | | 3 / 2B B
B
th t H
tw w w
ww wp
£ì= = í >î
Ex. 4.3.14Ex. 4.3.14
49

Signals & SystemsProf. M. Song
§ Output signal
§ Spectra
0
0
1
Z(
BB
H(
0
X(
1
B/2B/2
0
Y(
1
B/2B/2
3 B/2-3 B/2
( ) ( ) ( )sy t x t h t= *
( ) ( ) ( ) ( )Y X H Xw w w w= =
50
Ex. 4.3.14Ex. 4.3.14

Signals & SystemsProf. M. Song
§ Power spectrum of the periodic signal x(t) with period T
• where cn are the Fourier series coefficients of x(t)
§ Define the truncated signal
§ Fourier transform of periodic signal x(t)
( )20 0
2( ) 2 ,nn
S c nTpw p d w w w
¥
=-¥
= - =å
( ) ( )rect2tx t x tt t
æ ö= ç ÷è ø
[ ]1 1( ) 2 Sa ( ) ( ) 2 Sa ( ) ( )2 2
X X X dt w t wt w t qt w q qp p
¥
-¥= * = -ò
0( ) 2 ( )nn
X cw p d w w¥
=-¥
= -å
Ex. 4.3.15Ex. 4.3.15
51

Signals & SystemsProf. M. Song
§ Average power of
§ Power spectrum of x(t)
( ) ( )2
*0 0
( )2 Sa Sa
2 n mn m
Xc c n mt w
t w w t w w tt
¥ ¥
=-¥ =-¥
é ù é ù= - -ë û ë ûå å
( ) ( )0 0
1,0,
m nn m
m nd w w d w w
=ì- - = í ¹î
( )x tt
( )2
20
( )( ) lim 2
2 nn
XS c nt
t
ww p d w w
t
¥
®¥=-¥
\ = = -å
52
Ex. 4.3.15Ex. 4.3.15

Signals & SystemsProf. M. Song
§ Modulation• Modulated signal
where m(t) is a carrier signal.0( ) ( ) ( ) ( )cosy t x t m t x t tw= =
4.4.1 Amplitude Modulation
53
4.4 Applications of the Fourier Transform
Signal multiplier
• Spectrum[ ]
[ ]
0 0
0 0
1( ) ( ) ( ) ( )21 ( ) ( )2
Y X
X X
w w p d w w d w wp
w w w w
= * - + +
= - + +
Shift in frequency

Signals & SystemsProf. M. Song
54
[ ]0 01( ) ( ) ( )2
Y X Xw w w w w= - + +
§ This process of shifting the spectrum of the signal by w0 is necessary because low-frequency (baseband) information signals cannot be propagated easily be radio waves.

Signals & SystemsProf. M. Song
§ Process of extracting the information from the modulated signal
§ Synchronous demodulation• Demodulated signal
• Low-pass filtering [Fig. 4.4.3]
LPFy(t)
cos 0t
v(t)z(t)
0( ) ( )cosz t y t tw=
[ ]0 0
0 0
1( ) ( ) ( )21 1 1( ) ( 2 ) ( 2 )2 4 4
Z Y Y
X X X
w w w w w
w w w w w
= - + +
= + - + +
2, | |( )
0, | |B
B
Hw w
ww w
£ì= í >î
( ) ( ) ( ) ( )V H Z Xw w w w= =
55
Demodulation

Signals & SystemsProf. M. Song
• Spectrum of the demodulated output
56
LPFy(t)
cos 0t
v(t)z(t)

Signals & SystemsProf. M. Song
§ Frequency Division Multiplexing (FDM): A very useful technique for
simultaneously transmitting several information signals by assigning
a portion of the final frequency to each signal
• Examples− AM radio stations− TV stations− Fire engines− Police cruisers− Taxicabs− Mobile phones− And many other sources of radio waves
4.4.2 Multiplexing
57

Signals & SystemsProf. M. Song
§ Frequency division multiplexing (FDM)• Modulated signal
• Spectrum
1 1 2 2 3 3( ) ( )cos ( )cos ( )cosy t x t t x t t x t tw w w= + +
[ ] [ ]
[ ]
1 1 1 1 2 2 2 2
3 3 3 3
1 1( ) ( ) ( ) ( ) ( )2 2
1 ( ) ( )2
Y X X X X
X X
w w w w w w w w w
w w w w
= - + + + - + +
+ - + +
0
1
0
1
0
1
B1 B1 B2 B3 B3B2
4.4.2 Multiplexing
58

Signals & SystemsProf. M. Song
§ FDM system
59

Signals & SystemsProf. M. Song
§ The sampling theorem has the most impact on information
transmission and processing.
§ Sampling process• Let x(t) be a band limited signal.
• Sampler output, sampled signal
where p(t) is the periodic impulse train
− T : sampling period
− : sampling frequency
( ) 0, for | | BX w w w= >
( ) ( ) ( )sx t x t p t=
( ) ( )n
p t t nTd¥
=-¥
= -å
2 /s Tw p=
4.4.3 The Sampling Theorem
60

Signals & SystemsProf. M. Song
§ Spectrum of sampled signal
( )2 2 2( ) sn n
nP nT T Tp p pw d w d w w
¥ ¥
=-¥ =-¥
æ ö= - = -ç ÷è ø
å å1 1 1( ) ( ) ( ) ( ) ( ) ( )
2 2s sn
X X P X P d X nT
w w w s w s s w wp p
¥¥
-¥=-¥
= * = - = -åò
61

Signals & SystemsProf. M. Song
§ If , x(t) can be recovered from xs(t) using LPF.
§ If , x(t) cannot be recovered from xs(t). ⇒ aliasing
§ Nyquist sampling rate
2s Bw w³
2s Bw w<
2s Bw w=
|Xs
BB 0ss
s+ Bs Bs+ Bs B
BB 0 ss
BB 0 ss ss
|Xs
|Xs
s > 2 B
s < 2 B
s = 2 B
62
Nyquist sampling theorem

Signals & SystemsProf. M. Song
Nyquist sampling rate
§ Band limited signal with
§ Nyquist sampling rate
§ Sampling period
5 kHzBf =
2 10 kHzs Bf f= =
42 2 (2 5000) 2 10 rad/secs Bw w p p= = ´ ´ = ´
1 2 0.1 mss s
Tf
pw
= = =
Ex. 4.4.1Ex. 4.4.1
63

Signals & SystemsProf. M. Song
Aliasing
§ Band limited signal with
§ Sampling rate is
§ Aliasing
5 kHzBf =
8 kHzsf =
( )2s Bf f£Q
Ex. 4.4.2Ex. 4.4.2
64

Signals & SystemsProf. M. Song
Sampling of modulated signal
§ xa(t) is band limited to the range
§ Modulated signal xm(t)
§ Filtered signal xb(t) with LPF of
§ Sampled signal xs(t) with
800 1200 Hzf£ £
200 Hzcw =
1/ 400 sec, 400 HzsT f< >
1/ 500 sec, 500 HzsT f= =
Ex. 4.4.3Ex. 4.4.3
65

Signals & SystemsProf. M. Song
§ Spectra
• we can recover xa(t) from xs(t) by using a BPF
Xa
0 1 1.20.8-1
1
-1.2 -0.8
Xm
0 1-1
1
2-2
Xb
0 1-1
1
2-2
Xs
0 1-1
500
2-2
66
Ex. 4.4.3Ex. 4.4.3

Signals & SystemsProf. M. Song
§ Reconstruction• We can recover x(t) from sampled signal xs(t) by using a LPF
• Reconstructed signal
• It can be interpreted as using interpolation to reconstruct x(t) from its
samples x(nT) .
( ) ( ) ( )sX H Xw w w=
1, | | sin( ) , ( )0, | |
B B
B
tH h t Tt
w w ww
w w p£ì
= =í >î
sin( ) ( ) ( ) ( ) ( )
sin ( ) 2 sin ( )( ) ( )( ) ( )
Bs
n
B B B
n n s
tx t x t h t x t t nT Tt
t nT t nTTx nT x nTt nT t nT
wd
pw w w
p w p
¥
=-¥
¥ ¥
=-¥ =-¥
é ù= * = - *ê úë û
- -= =
- -
å
å å
67

Signals & SystemsProf. M. Song
§ Filtering is the process by which the essential and useful part of a
signal is separated from noise.• Passband: the range of frequencies that pass through
• Stop band: the range of frequencies that do not pass
• The most common types of filters− Low-pass filter (LPF) − High-pass filter (HPF)− Band-pass filter (BPF)− Band-stop filter (BSF)
4.4.4 Signal Filtering
68

Signals & SystemsProf. M. Song
Ideal LPF
§ This filter is noncausal and is not physically realizable.
lp
1, | |( )
0, otherwisecH
w ww
<ì= í
î
lp ( ) sincc cth t w wp p
=
lp ( ) 0 for 0h t t¹ <
Ex. 4.4.4Ex. 4.4.4
69

Signals & SystemsProf. M. Song
§ The most filters we deal with in practice are different from the ideal
filters which pass one set of frequencies without any change and
completely stop others. Practical filters have some transition band as
shown in following figure.
70
Practical Filters

Signals & SystemsProf. M. Song
RC circuit
§ Low-pass RC circuit• Transfer function
• Amplitude spectrum ⇒ LPF
• Cutoff frequency
1( )1
Hj RC
ww
=+
2
1( )( ) 1
HRC
ww
=+
2
1 1 1( )2( ) 1
c c
c
HRCRC
w ww
= = Þ =+
1 kΩ, C=1 FR m=
Ex. 4.4.5Ex. 4.4.5
71

Signals & SystemsProf. M. Song
§ High-pass RC circuit• Transfer function
• Amplitude spectrum ⇒ HPF
• Cutoff frequency
y(t)x(t)
C
R+
-
1( ) 11 1
j RCHj RC
j RC
www
w
= =+ +
2
2
1( )1( ) 1 1
( )
RCHRC
RC
www
w
= =+ +
2
1 1 1( )211
( )
c c
c
HRC
RC
w w
w
= = Þ =+
1 kΩ, C=1 FR m=72
Ex. 4.4.5Ex. 4.4.5

Signals & SystemsProf. M. Song
73
Passive or Active Filters
§ Filters can be classified as passive or active.• Passive filters: made of passive elements (resistors, capacitors, and inductors)
• Active filters: use operational amplifiers with capacitors and resistors.
• Passive filters are relatively large in size, more stable against parameter changes,
and can operate at higher frequencies.
• Active filters are small, more sensitive to parameter changes, operate at lower
frequencies, and need voltage sources.

Signals & SystemsProf. M. Song
4.5 Duration-Bandwidth Relations
74

Signals & SystemsProf. M. Song
75
4.6 Summary