chapter-iii conventional to soft computing...
TRANSCRIPT

20
CHAPTER-III
CONVENTIONAL TO SOFT COMPUTING
TECHNIQUES
21
CHAPTER-III
CONVENTIONAL TO SOFT COMPUTING
TECHNIQUES
3.0. INTRODUCTION
HVDC systems are highly uncertain; obtaining an accurate
mathematical model of the plant is not possible. Thus, the controller
incorporated has to satisfy the many constraints. They should operate
well over a wide operating range, they should adapt to changing
system conditions and parameters, should not be sensitive to
nonlinearities, should not demand a mathematical model of the plant
and should be simple to design and implement.
This leads to considerable research in the field of effective control
of a HVDC systems using either adaptive, optimal, or Intelligent
controllers such as fuzzy and neural networks or genetic algorithm
controllers .So, brief description of conventional to intelligent controls
for HVDC is presented in brief in the next few sections.
3.1. OPERATIONAL MODES OF AC-DC INTERCONNECTON
FROM CONVENTIONAL CONTROL THEORY
Figure 3.1 is the model of a transmission system comprising of two
converters, one acting as a rectifier and the other as an inverter. The
rectified dc power is transferred from the sending terminal to the
receiving end over a line consisting of a resistance connected in series

22
with an Inductance L consisting smoothing reactors which reduce the
ripple content in the dc power.
Figure 3.1 A Two Terminal HVDC System
Eq‟n (3.1) represents the current exchanged in a dc interconnector
----------------------(3.1)
Where Vdr is the rectifier side dc voltage.
Vdi is the inverter end dc voltage.
From the converter control theory the Vd –Id equation for a rectifier
can be written as
-------------------(3.2)
A similar Vd –Id relationship for inverter end is written as
β -------------------(3.3)
Or
γ --------------------(3.4)
So from the above two equations 3.2 and 3.3 an equation for the dc
link current in terms of the controllable parameters can be written as
β)/RL+Rcr+Rci --------------------(3.5)
23
3.2. NEED FOR CONVERTER CONTROL
Converter control has a major role to play in avoiding large
variations of the link current and attain a reasonable performance of
the HVDC system. A merger variation in the value of Vdr or Vdi may
result in huge variation of Id .So it can be inferred that even if r and
i are kept constant, Id may vary over a very wide range for small
variations in ac voltage at the either terminals. Such variation cannot
be tolerated as the resulting current may damage the thyristor valves
and remaining system components. Therefore effective and fast
control of power to limit wild variations in current is an essential
requisite for practical applications of a HVDC system.
Therefore from the equation (3.5) it can be concluded that the
changes in current dI can occur because of the variation of
Firing Angle α at the rectifier
Advance angle β or extinction angle γ at the inverter
Transformer tap to vary voltages at both ends of the system.
The power factor at sending and receiving end systems can be found
from
)cos((cos5.0)cos( ------(3.6)
Or
)cos((cos5.0)cos( ------(3.7)
In view of minimizing losses and current rating of the ac system
apparatus and maximize power rating of the converter as large for a
particular current , power factor of the ac system should be high.
24
3.3 .REQUREMENTS OF KEEPNG LOW POWER FACTOR
Four reasons are concerned with maintaining the power factor
high; two concerning the converter itself and the other two concerning
the ac system to which it is connected. Primarily for specified values of
currents and voltages, it is to maximize rated power of the converters,
voltage specifications of valves and transformers. The second factor is
reduction in stresses on switches. The third reason is to minimize the
required current rating and the copper losses in the ac lines to the
converter. The fourth reason is to minimize voltage drops at the ac
terminals of the converter as the loading increases. The last two
reasons apply to any large ac loads. The power factor can be raised by
adding shunt capacitors, and if this is done the disadvantages become
the cost of the capacitors and switching them as the load on the
converter varies. The Reactive power requirement at the converters is
dependent on . Reactive power requirement at the rectifier side rises
with the rise of converter firing angle and similarly the reactive
power requirement at inverter increases with the rise of converter
extinction angle (γ).
)cos([cos2/1cos u
-------- --------------(3.8)
)cos([cos2/1cos u
----------------------(3.9)
In order to get a reasonably high power factor, it is preferred to
operate the inverter with minimum extinction angle (γ) and the
25
rectifier with minimum firing angle (a).In a rectifier, it is easy to make
a=0, for which cos a = 1 . There are various practical reasons for
which a has to be limited to around 50. The rectifier has a minimum
alpha limit of about 50 to ensure adequate voltage across the valve
before firing. For example, in the case of thyristors ,the +ve voltage
appearing across each thyristor before firing is used to charge the
supply circuit providing the firing pulse energy to the thyristor.
Therefore, firing cannot occur earlier than about alpha =50.
Consequently ,the rectifier normally operates at a value of alpha
within the range of 15 to 20 o so as to leave room for increasing
rectifier voltage to control dc power flow. In an inverter it is more
difficult, and must be greater than zero by some margin. Extinction
angle (γ) is not supposed to hit this minimum for the reason that
follows.
3.4. γ MINIMUM LIMIT
The reason lies in the fact that, after a valve (thyristor) turns off, it
should regain its blocking capability, prior to re-application of the
forward voltage. We cannot control directly but instead must control
the ignition advance angle u in accordance with the value of
overlap angle u. A generally noted problem at an inverter is the failure
of transfer of current from one valve to other.
26
3.5. COMMUTATION FALIURE
Commutation failure is the phenomenon in which an off-going
valve (thyristor) either does not completely extinguish, or re-ignites
immediately on forward voltage. Commutation failure occurs when
conditions in the ac or dc circuits outside of the bridge results in
inadequate line voltage which is necessary for valve turn-off. In order
to ensure successful commutation during steady state operation, the
ongoing valve should be fired when there is sufficient line voltage to
successfully transfer current from one valve to another. This can be
achieved by maintaining a minimum commutation margin, making
sure that after a valve turns off, it does not see forward voltage until
the end of the margin period. This period, expressed as an electrical
angle, is called the extinction angle (γ) of the valve, and the above
strategy ensures that its value be kept at a constant γ, (typically 15°-
180). The controller that achieves this goal is called the constant
extinction angle (CEA) controller. The reason lies in the fact that, after
a valve (thyristor) turn off it should regain its blocking capability, prior
to re-application of the forward voltage. We cannot control directly but
instead must control the ignition advance angle u in
accordance with the value of overlap angle u.
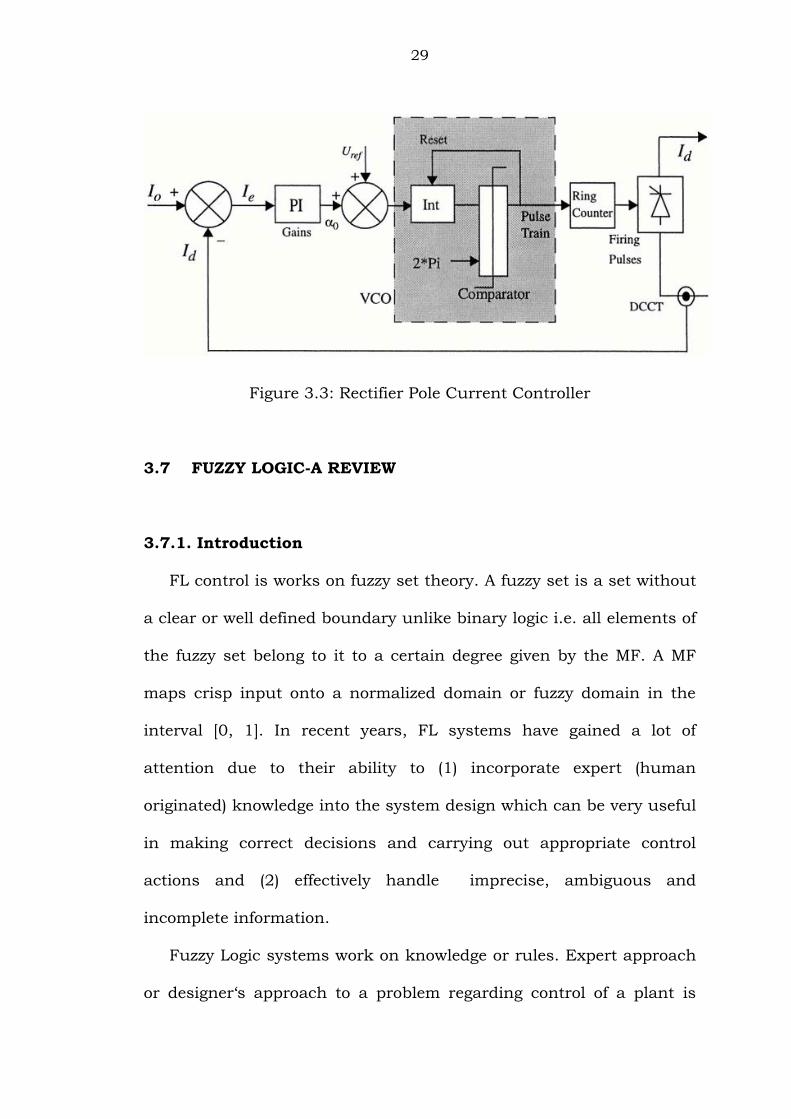
3.6. CONTROLS EMPLOYED
Under rated conditions the rectifier is in CC and inverter is in CEA
control mode. System changes such as ac side voltage reduction at the
rectifier end pushes the CC controller to hit the minimum firing angle
27
limit on the rectifier side (a = amin), and the controller acts as the
constant firing angle.
Simultaneously the inverter controller should switch from CEA to
CC. In other words the current control function is taken over at the
inverter end, with the rectifier operating on its uncontrolled
characteristic at the minimum firing angle. Inverter is also equipped
with an current controller, but for this the terminal current reference
is dropped by the amount dI , the so called current margin.
So as to further improve the performance of the controller a few
particulars are also included into the HVDC control scheme. Some of
these modifications are of general nature and common among all the
control schemes, and are summarized.
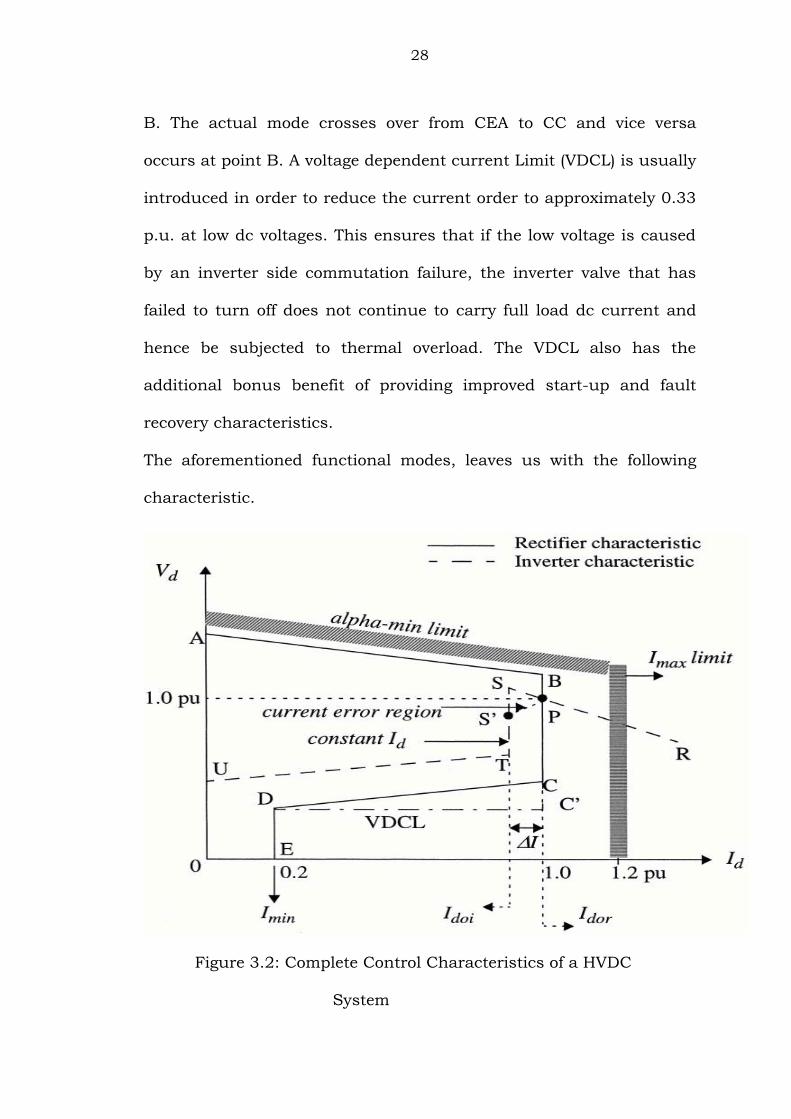
In order to prevent sudden changes in the operating point during
system transients (as mentioned above), the crossover sharp knee (as
shown dashed-dotted figure 3.2) is broken with a positive resistance
drop from the γ min characteristic to current control characteristic of
the inverter (AB instead of AB 'B figure (3.2)). This droop characteristic
is usually called current error control (CEC) as shown in figure (3.2).
In fact as long as the CEC block is active and the operating point lies
on the droop line AB, the inverter is under the CEA control mode with
adjusted value for the reference .
At point A, is at γ minimum limit. As the point moves down along
line AB a linear offset is added to γ min which is equal to Ay at point
28
B. The actual mode crosses over from CEA to CC and vice versa
occurs at point B. A voltage dependent current Limit (VDCL) is usually
introduced in order to reduce the current order to approximately 0.33
p.u. at low dc voltages. This ensures that if the low voltage is caused
by an inverter side commutation failure, the inverter valve that has
failed to turn off does not continue to carry full load dc current and
hence be subjected to thermal overload. The VDCL also has the
additional bonus benefit of providing improved start-up and fault
recovery characteristics.
The aforementioned functional modes, leaves us with the following
characteristic.
Figure 3.2: Complete Control Characteristics of a HVDC
System
29
Figure 3.3: Rectifier Pole Current Controller
3.7 FUZZY LOGIC-A REVIEW
3.7.1. Introduction
FL control is works on fuzzy set theory. A fuzzy set is a set without
a clear or well defined boundary unlike binary logic i.e. all elements of
the fuzzy set belong to it to a certain degree given by the MF. A MF
maps crisp input onto a normalized domain or fuzzy domain in the
interval [0, 1]. In recent years, FL systems have gained a lot of
attention due to their ability to (1) incorporate expert (human
originated) knowledge into the system design which can be very useful
in making correct decisions and carrying out appropriate control
actions and (2) effectively handle imprecise, ambiguous and
incomplete information.
Fuzzy Logic systems work on knowledge or rules. Expert approach
or designer„s approach to a problem regarding control of a plant is

30
accumulated in the knowledge base as clear IF-THEN rules and this
knowledge base is used by Fuzzy Logic Controller to deduce
appropriate control action employing an inference strategy.
Overall, Fuzzy Logic controller acts as a buffer between a
nonlinear, highly complex system and desired control output, offering
numerous advantages such as providing a model free approach,
allowing human intelligence to be included in the control scheme and
ability to perform any nonlinear control action as fuzzy systems are
universal.
In recent years the fuzzy logic control technique has been used in
many applications, by which the controller performance can be
improved significantly as compared to conventional methods in the
presence of model uncertainties. In this chapter a basic introduction
about fuzzy logic design technique is given which describes the main
parts of the fuzzy controller and the description of each component is
given in detail.
3.7.2. Fuzzy Sets
As per the properties of classical set theory we speak whether an
element do or do not belong to a set. For eg: It‟ s 100% percent true
that the number three is a one among the set of odd numbers
and 100% percent false that it belongs to the set of even numbers.
But in the case of fuzzy an object partly will be a member of fuzzy set
and at the same instant to another set.
31
Let G be very big space all its components represented by y, then a
fuzzy set B in G is denoted as a set of prearranged pairs.
GyyxB B ),(,{ --------------------------------------(3.10)
B(y) is called the membership function (or MF) of y in B. MF‟S
relates all members of G to a value between 0 and 1. Degrees of
fuzziness are not similar to probability percentages, Probabilities tell
us whether a thing will happen or not, fuzziness defines the extent to
which something occurs.
3.7.3. Membership Function.
Membership functions can be a variety of shapes, the most
usual being triangular, trapezoidal, singleton or an exponential. The
simplest membership function is a straight line. A triangular
membership function is formed by a number of straight lines.
Trapezoidal, Gaussian, and bell-shaped functions are also extensively
used .In [31] it is concluded that the performance of fuzzy logic fault
detector designed considering three membership functions of
triangular shape is better than trapezoidal and Gaussian membership
functions. In [32] the investigation concluded that shape of MF‟s
slightly affect the performance with nonlinear MF‟s (Gaussian ) being
better than linear MF‟s. Polynomial distribution has a slightly worse or
similar performance to linear distribution. Therefore, linear
distribution of MF‟s is recommended to be used for the control of
HVDC systems. Investigations available in literature [33] and [34]
32
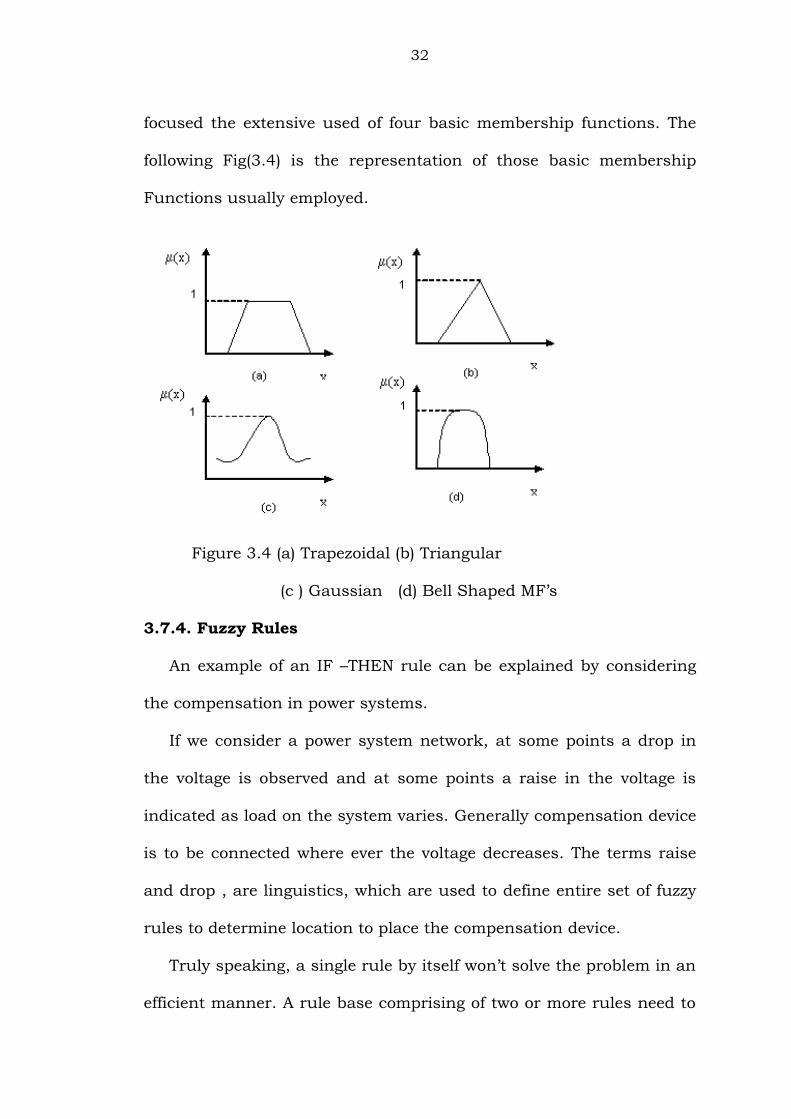
focused the extensive used of four basic membership functions. The
following Fig(3.4) is the representation of those basic membership
Functions usually employed.
Figure 3.4 (a) Trapezoidal (b) Triangular
(c ) Gaussian (d) Bell Shaped MF‟s
3.7.4. Fuzzy Rules
An example of an IF –THEN rule can be explained by considering
the compensation in power systems.
If we consider a power system network, at some points a drop in
the voltage is observed and at some points a raise in the voltage is
indicated as load on the system varies. Generally compensation device
is to be connected where ever the voltage decreases. The terms raise
and drop , are linguistics, which are used to define entire set of fuzzy
rules to determine location to place the compensation device.
Truly speaking, a single rule by itself won‟t solve the problem in an
efficient manner. A rule base comprising of two or more rules need to
33
be played-off one other. Each rule gives us a fuzzy set. All these
generated fuzzy sets are segregated in to one output set and the
obtained set has to be defuzzified.
3.7.5 FLC Structure
In the conventional control, the amount of control is determined
in relation to a number of data inputs using a set of equations to
express the entire control process. Expressing human experience in
the form of a mathematical formula is a very difficult task, if not an
impossible one. Fuzzy logic provides a simple tool to interpret this
experience into reality. Fuzzy logic controllers are rule-based
controllers. The structure of the FLC resembles that of a knowledge
based controller except that the FLC utilizes the principles of the fuzzy
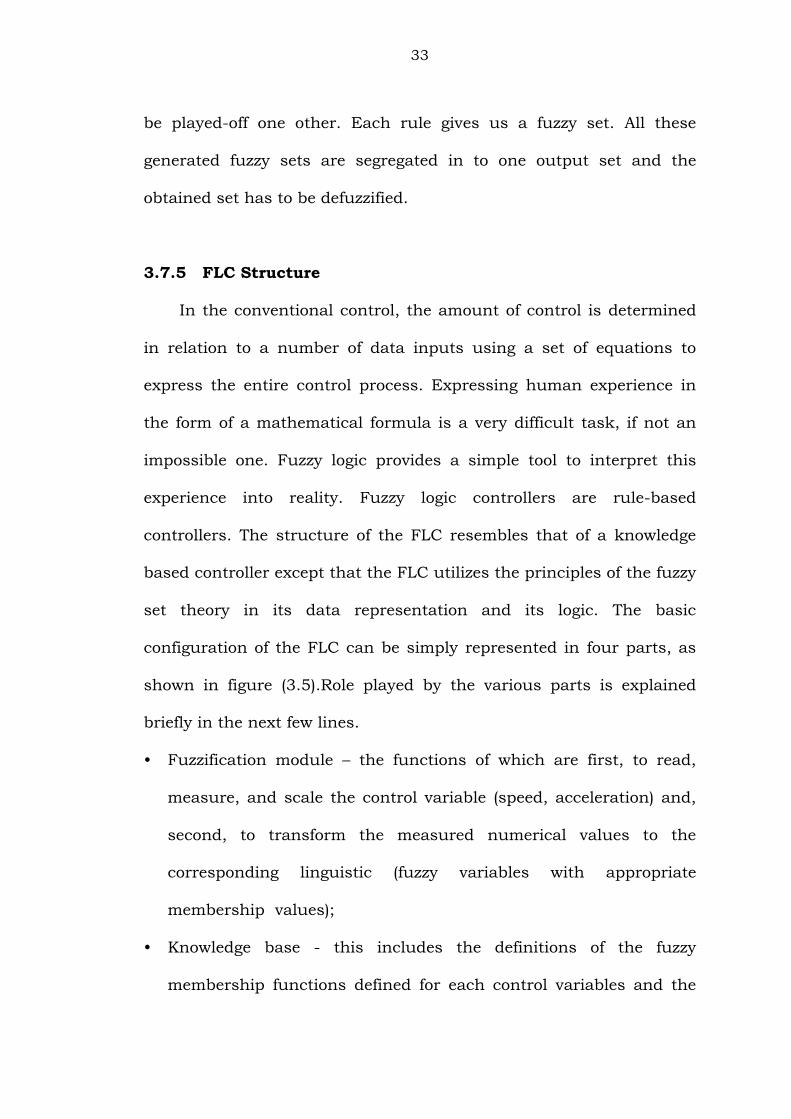
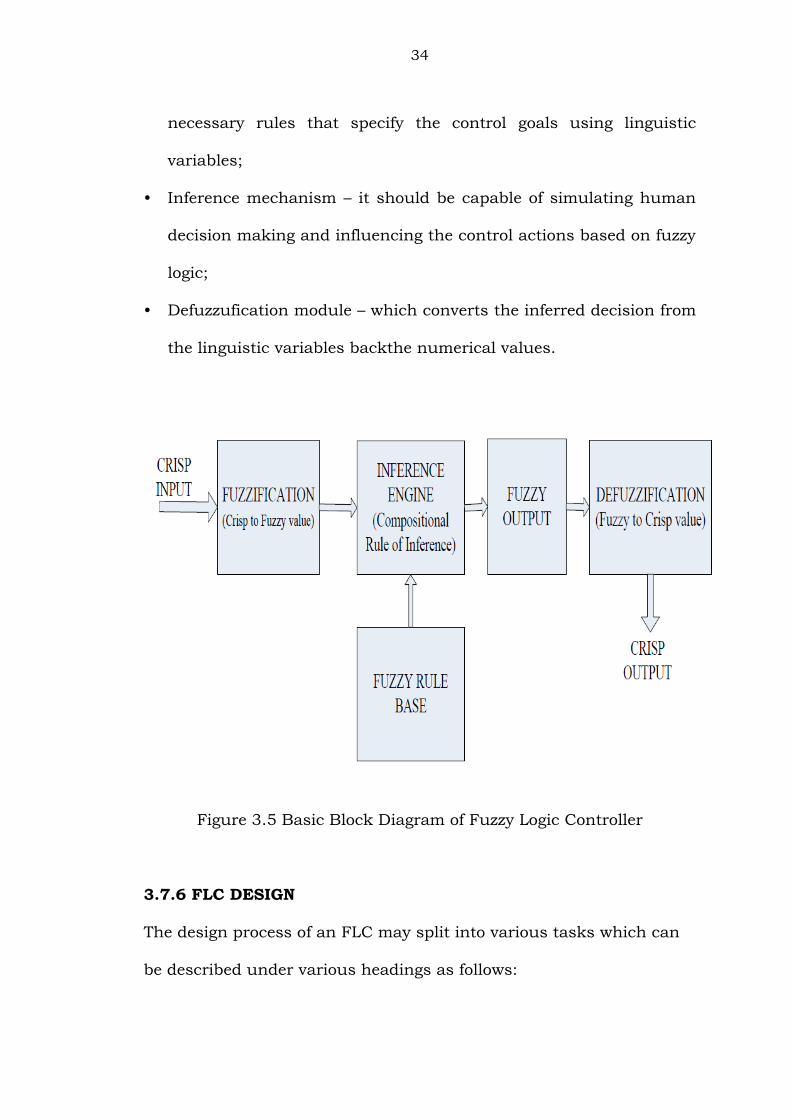
set theory in its data representation and its logic. The basic
configuration of the FLC can be simply represented in four parts, as
shown in figure (3.5).Role played by the various parts is explained
briefly in the next few lines.
• Fuzzification module – the functions of which are first, to read,
measure, and scale the control variable (speed, acceleration) and,
second, to transform the measured numerical values to the
corresponding linguistic (fuzzy variables with appropriate
membership values);
• Knowledge base - this includes the definitions of the fuzzy
membership functions defined for each control variables and the
34
necessary rules that specify the control goals using linguistic
variables;
• Inference mechanism – it should be capable of simulating human
decision making and influencing the control actions based on fuzzy
logic;
• Defuzzufication module – which converts the inferred decision from
the linguistic variables backthe numerical values.
Figure 3.5 Basic Block Diagram of Fuzzy Logic Controller
3.7.6 FLC DESIGN
The design process of an FLC may split into various tasks which can
be described under various headings as follows:
35
a. Selection of the control variables
The selection of control variables (controlled inputs and outputs)
depends on the nature of the controlled system and the desired
output. Usually the output error (e) and the rate or derivative of the
output (de) are used as controller inputs. Some researchers have also
proposed the use of error and the integral of error as an input to the
FLC [33].
b. Representation of Membership functions
Each of the FLC input signal and output signal, fuzzy variables
(Xj={e, de,u}), has the real line R as the universe of discourse. In
practice, the universe of discourse is restricted to a comparatively
small interval [Xminj, Xmaxj]. The universe of discourse of each fuzzy
variables can be quantized into a number of overlapping fuzzy sets
(linguistic variables).The number of fuzzy sets for each fuzzy variables
varies according to the application. The reasonable number is an odd
number (3,5,7…). Increasing the number of fuzzy sets results in a
corresponding increase in the number of rules.
c. Defuzzification strategy
Defuzzification is a process of converting the FLC inferred control
actions from fuzzy vales to crisp values. This process depends on the
output fuzzy set, which is generated from the fired rules. The
performance of the FLC depends very much on the deffuzzification
36
process. This is because the overall performance of the system under
control is determined by the controlling signal (the defuzzified output
of the FLC.As mentioned in [33] various defuzzification methods have
been proposed to convert the output of the fuzzy controller to a crisp
value required by the plant. These methods are: Center of Area (COA),
Center of Sum (COS), Height Method (HM), Mean of maxima (MOM),
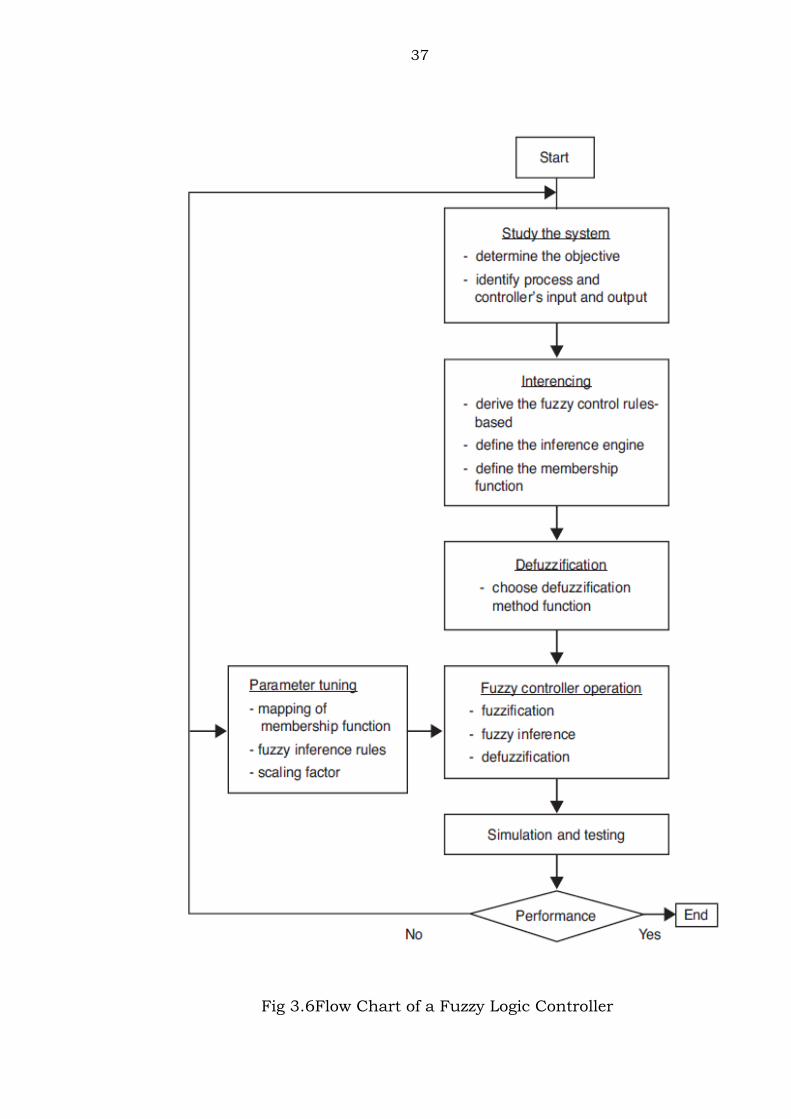
Center of Largest (COLA) and First maxima (FM).The flow chart
representing the various operations involved can be drawn as shown
in the figure (3.6).
The main part of the FLC is the Rule Base and the Inference
Mechanism. The rule base is normally expressed in a set of Fuzzy
Linguistic rules, with each rule triggered with varying belief for
support. The ith linguistic control rule can be expressed as:
Ri: If ei is Ai and dei is Bi THEN ui is Ci,
Where Ai and Bi (antecedent), Ci (consequent) are fuzzy variables
characterized by fuzzy membership functions.
37
Fig 3.6Flow Chart of a Fuzzy Logic Controller
38
3.8. ASPECTS OF NEURAL NETWORKS UTILISED IN THE THESIS
3.8.1. Introduction Artificial Neural networks are data handling prototypes comprising
networked data processing elements called neurons which work
together to perform a specific task. A data archetype is utilized to
teach NN . Constituents of the NN which handles information are
known as neurons. A neuron takes many inputs and gives an output.
The firing principle decides the output to be engendered for a specific
sample of input. Weight allocated to a particular node is a
consequence of effect of an input on the output. The neuron gives us
an output if the sum of the products of inputs and their
corresponding weights exceeds an upper limit.
In a feed Forward Neural Network the parameters traversal is form
input to output. On the contrary in feedback networks data takes the
path of various loops and can travel in any direction from input to
output or output to input.
3.8.2. Back Propagation Algorithm
The process involved in BPA can be demonstrated by considering a
three layer feed forward network consisting of a input, output as well
as a hidden layer.
39
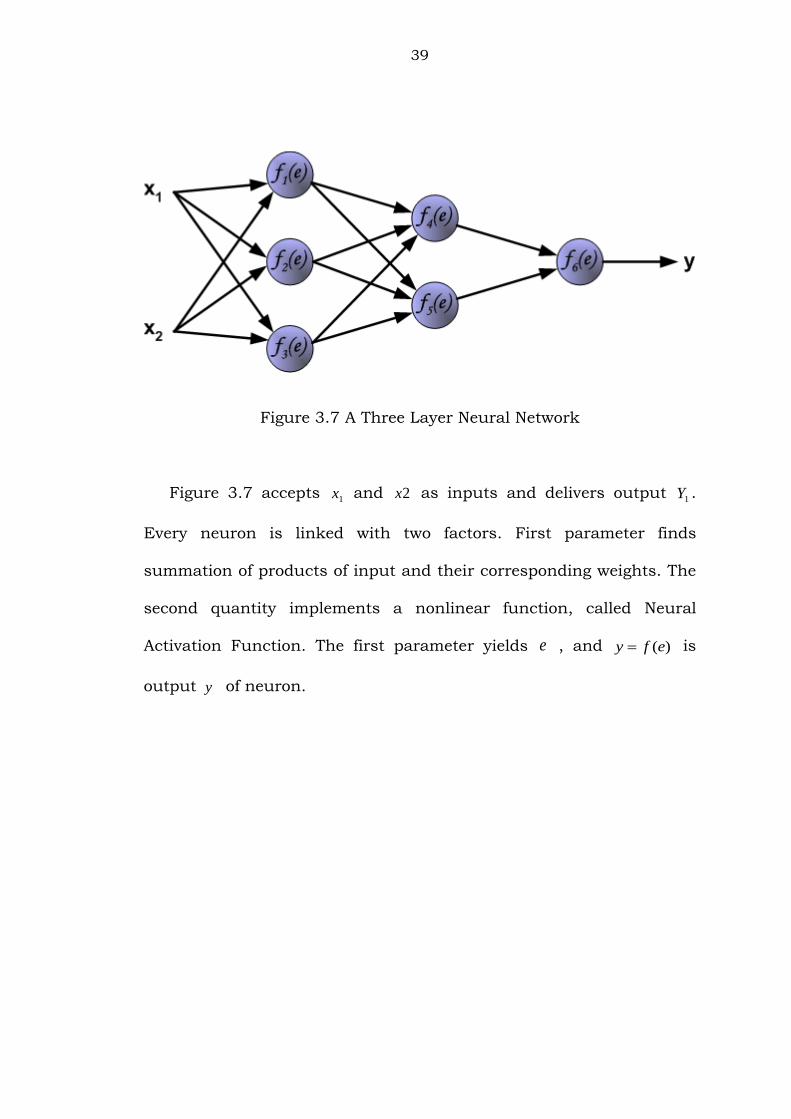
Figure 3.7 A Three Layer Neural Network
Figure 3.7 accepts 1x and 2x as inputs and delivers output
1Y .
Every neuron is linked with two factors. First parameter finds
summation of products of input and their corresponding weights. The
second quantity implements a nonlinear function, called Neural
Activation Function. The first parameter yields e , and )(efy is
output y of neuron.
40
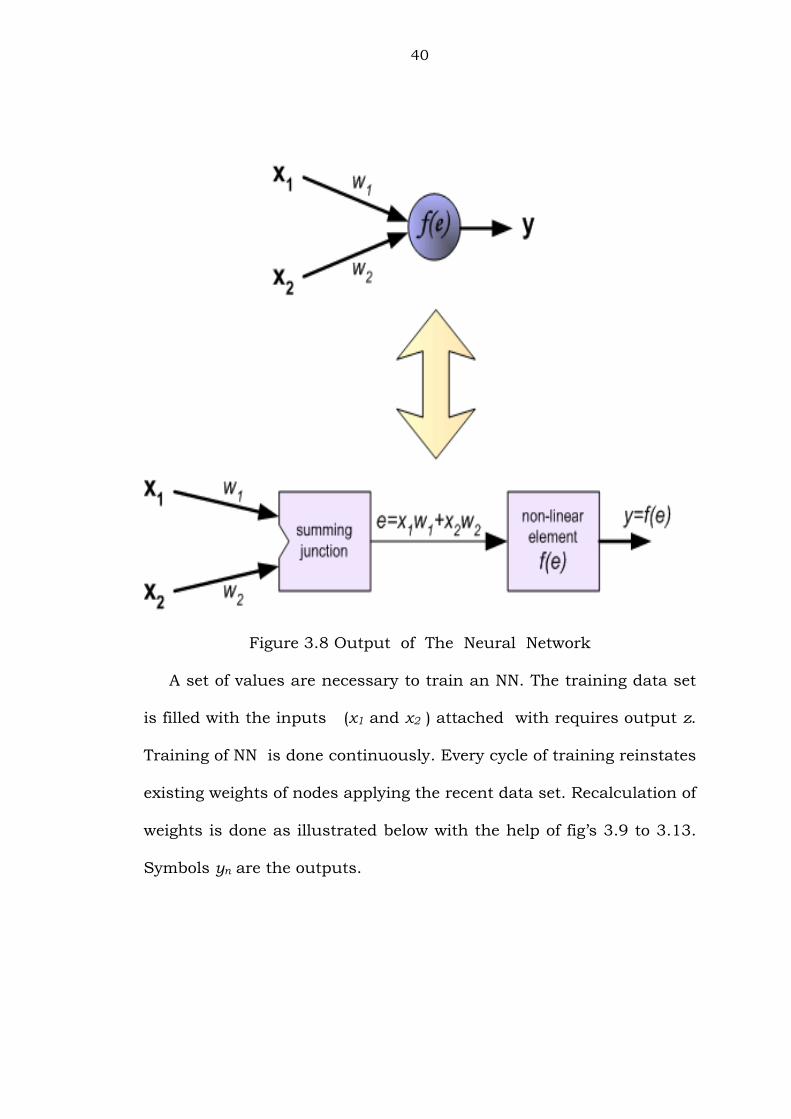
Figure 3.8 Output of The Neural Network
A set of values are necessary to train an NN. The training data set
is filled with the inputs (x1 and x2 ) attached with requires output z.
Training of NN is done continuously. Every cycle of training reinstates
existing weights of nodes applying the recent data set. Recalculation of
weights is done as illustrated below with the help of fig‟s 3.9 to 3.13.
Symbols yn are the outputs.
41
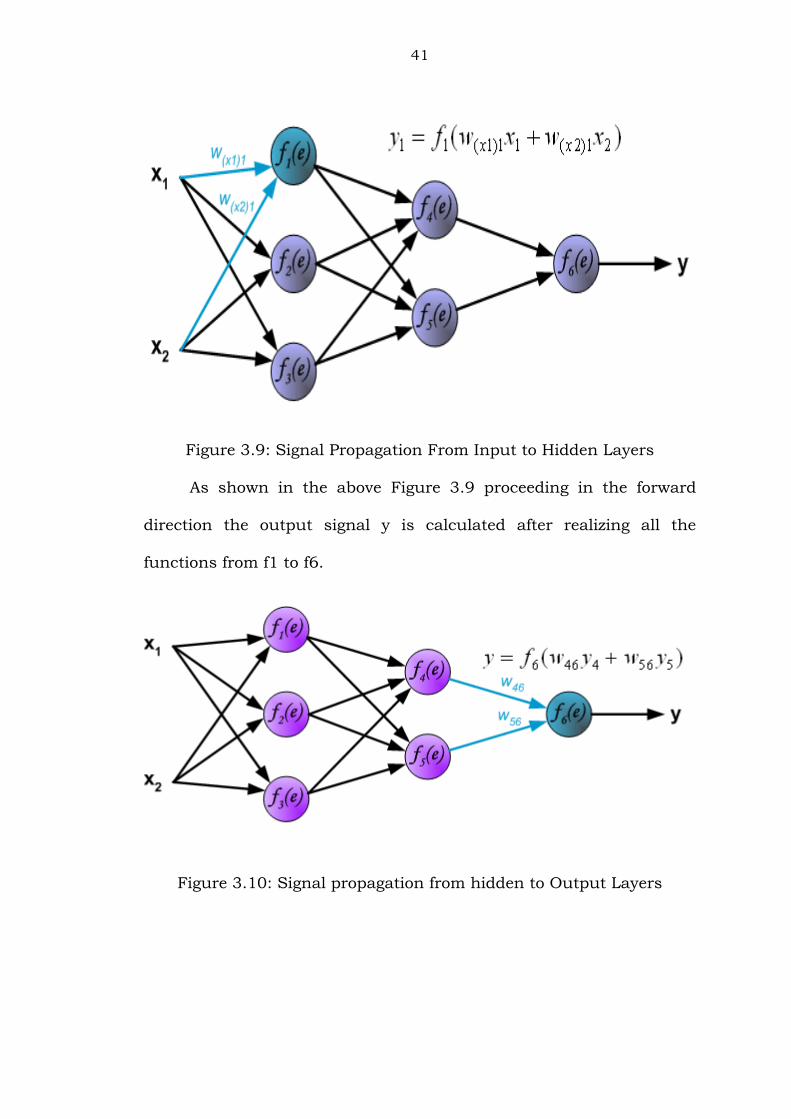
Figure 3.9: Signal Propagation From Input to Hidden Layers
As shown in the above Figure 3.9 proceeding in the forward
direction the output signal y is calculated after realizing all the
functions from f1 to f6.
Figure 3.10: Signal propagation from hidden to Output Layers
42
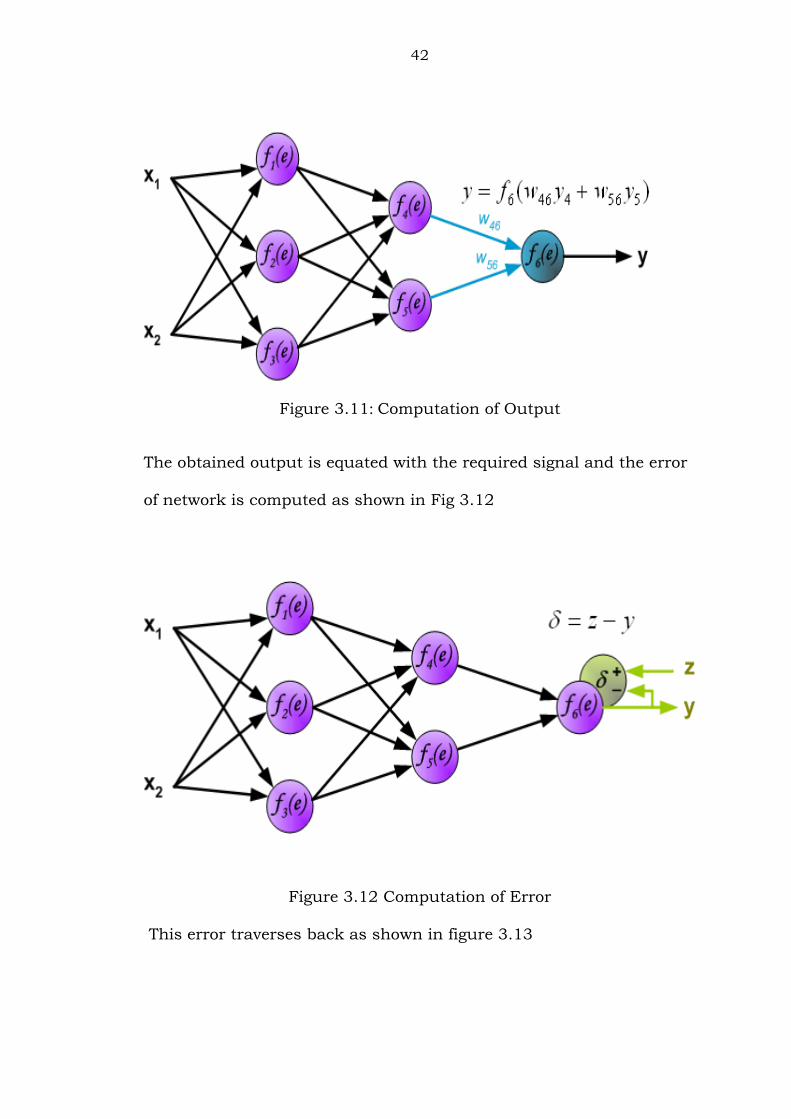
Figure 3.11: Computation of Output
The obtained output is equated with the required signal and the error
of network is computed as shown in Fig 3.12
Figure 3.12 Computation of Error
This error traverses back as shown in figure 3.13
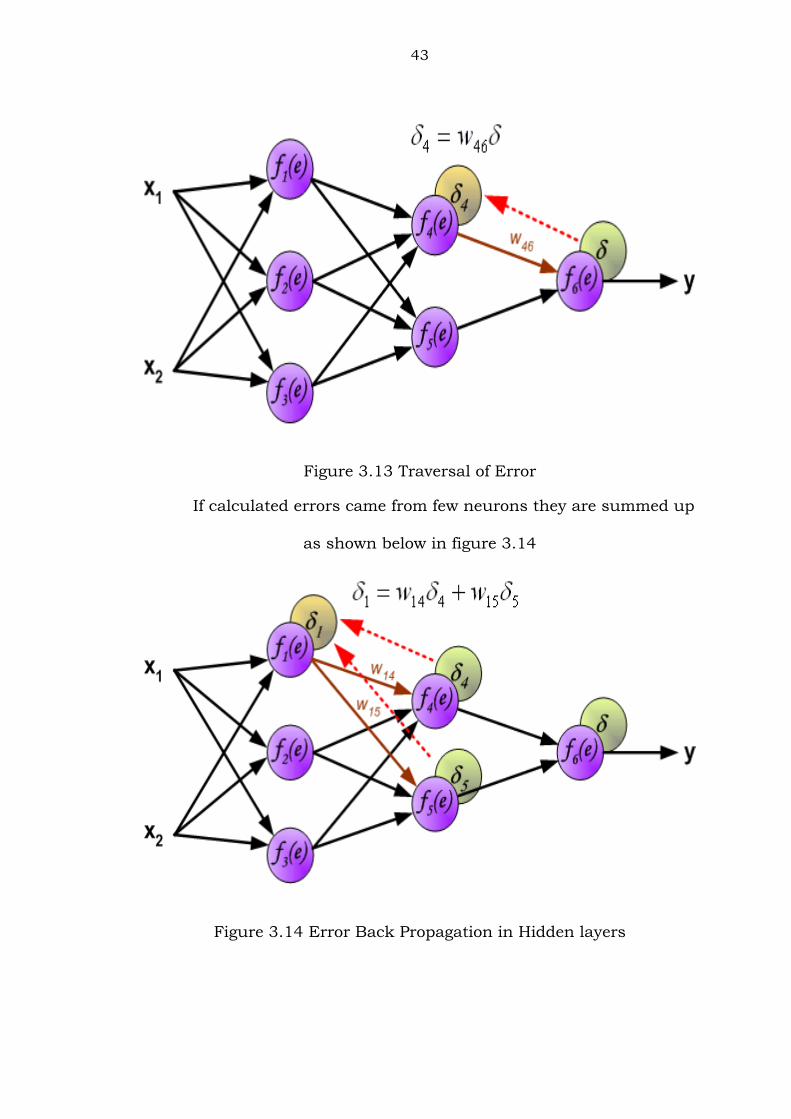
43
Figure 3.13 Traversal of Error
If calculated errors came from few neurons they are summed up
as shown below in figure 3.14
Figure 3.14 Error Back Propagation in Hidden layers
44
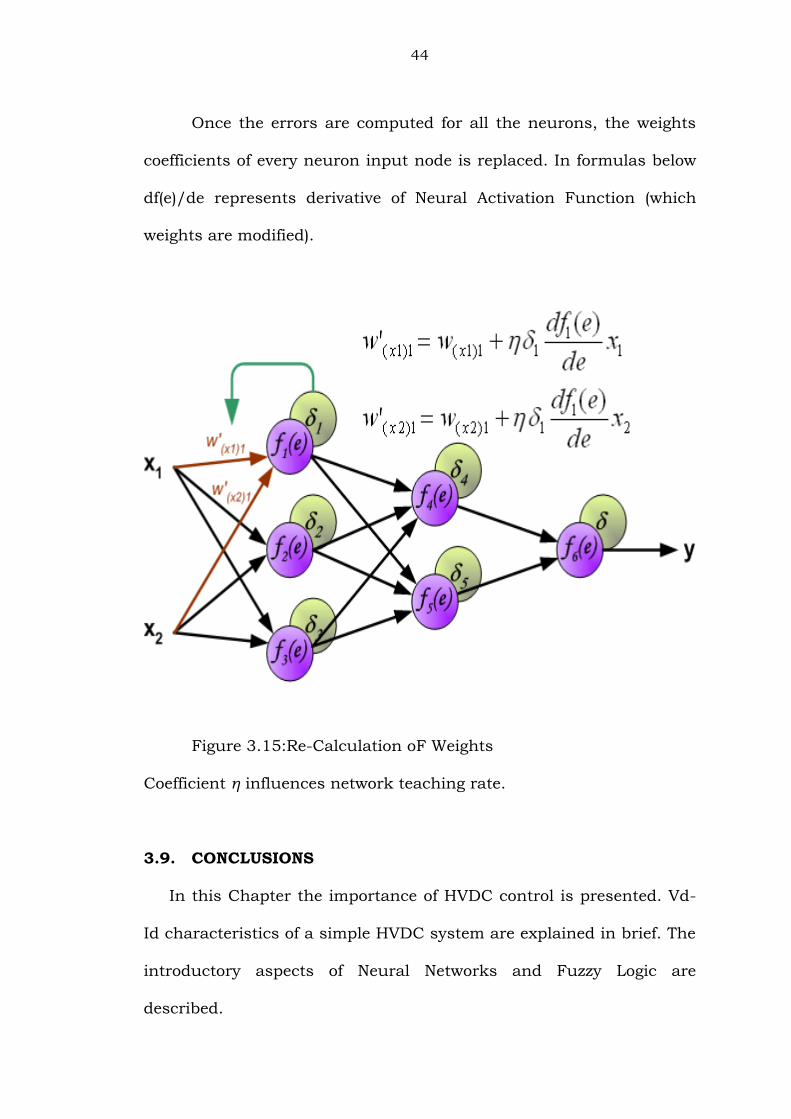
Once the errors are computed for all the neurons, the weights
coefficients of every neuron input node is replaced. In formulas below
df(e)/de represents derivative of Neural Activation Function (which
weights are modified).
Figure 3.15:Re-Calculation oF Weights
Coefficient η influences network teaching rate.
3.9. CONCLUSIONS
In this Chapter the importance of HVDC control is presented. Vd-
Id characteristics of a simple HVDC system are explained in brief. The
introductory aspects of Neural Networks and Fuzzy Logic are
described.