cielguard ben holt, ryan andersen, jed casper founding member: hockeybot federation ciel: french for...
Post on 20-Dec-2015
213 views
TRANSCRIPT

CielguardCielguard
Ben Holt, Ryan Andersen, Jed Ben Holt, Ryan Andersen, Jed CasperCasper
Founding Member: HockeyBot Founding Member: HockeyBot FederationFederation
Ciel: French for skyCiel: French for skyGuard: to be careful or to protectGuard: to be careful or to protect

Presentation OrganizationPresentation Organization
• OverviewOverview
• Project GoalsProject Goals
• Project LayoutProject Layout
• ProblemsProblems
• ResultsResults
• DemoDemo
• ConclusionConclusion
• Q & AQ & A
OverviewOverview
• Cs4710Cs4710– Given partsGiven parts
• Systronix JstampSystronix Jstamp
• CMU CameraCMU Camera
• Sonar UnitSonar Unit
• Lego MindstormsLego Mindstorms
• BatteriesBatteries
• Anything else we buyAnything else we buy
– ““Do Something Do Something Interesting”Interesting”
– Studied Autonomous Studied Autonomous Robots from U of Robots from U of MichiganMichigan
• HockeyBot FederationHockeyBot Federation– Question: Has anyone Question: Has anyone
played autonomous played autonomous Street Hockey before?Street Hockey before?
– Old Answer: No.Old Answer: No.– RulesRules
• AutonomousAutonomous
• Only on board sensorsOnly on board sensors
• 5 second shot rule5 second shot rule
• Base Class SharingBase Class Sharing
Cielguard GoalsCielguard Goals
• Unit TestingUnit Testing
• Real-time Control with JavaReal-time Control with Java
• Corners/Walls AdaptationCorners/Walls Adaptation
• Offense-Defense CapabilitiesOffense-Defense Capabilities
• Ball DetectionBall Detection
• Goal DetectionGoal Detection
• Rely on VisionRely on Vision
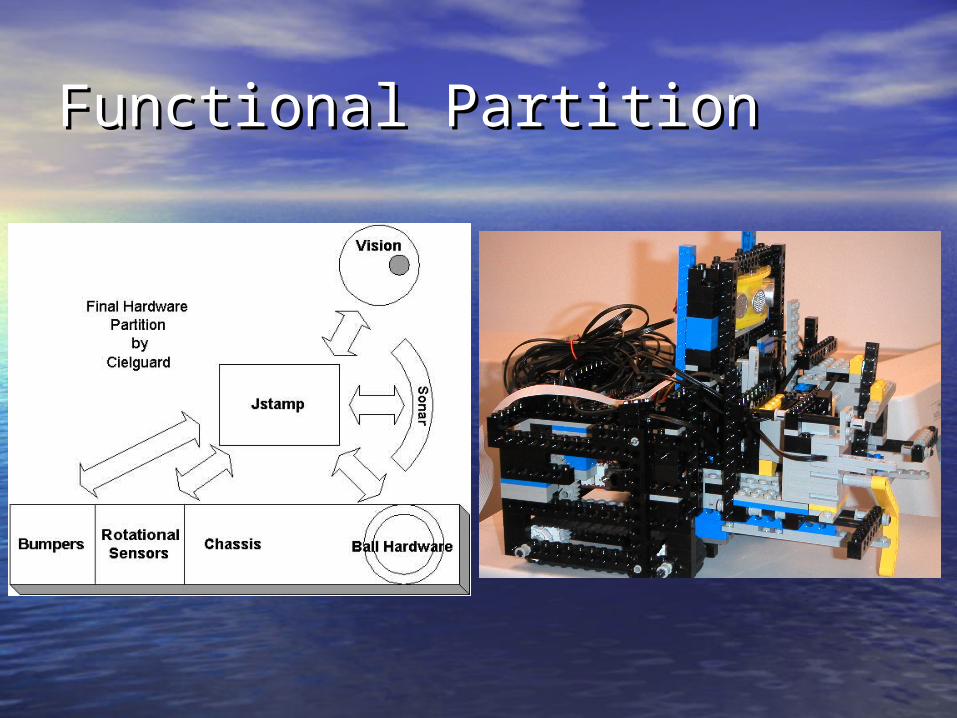
Functional PartitionFunctional Partition
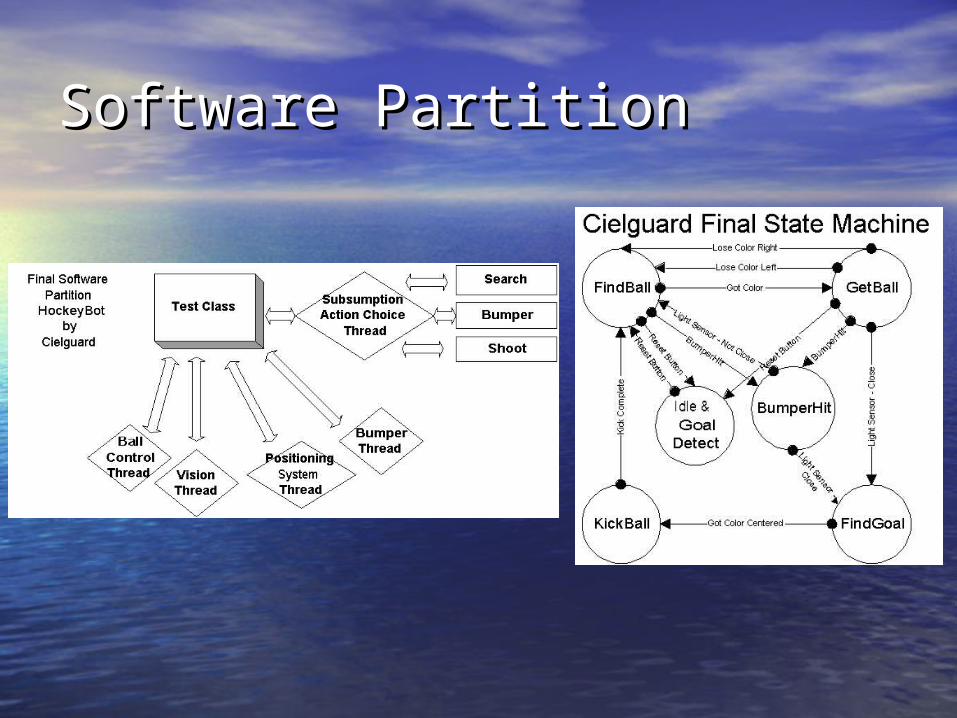
Software PartitionSoftware Partition
ProblemsProblems
• CMU Cam dropping a byteCMU Cam dropping a byte• Ball ManipulationBall Manipulation• Sonar Not Integrating with new CodeSonar Not Integrating with new Code• ““Turtle Effect”Turtle Effect”• Turtle SpeedTurtle Speed• Delayed Snapshot ShootingDelayed Snapshot Shooting• LED FascinationsLED Fascinations• PID Controller lost Rotational SensorsPID Controller lost Rotational Sensors• Non-Linear MotorsNon-Linear Motors
Original Goals vs. Original Goals vs. CompletionCompletion• Original GoalsOriginal Goals
– Unit TestingUnit Testing– Real-time Control with Real-time Control with
JavaJava– Corners/Walls AdaptationCorners/Walls Adaptation– Offense-Defense Offense-Defense
CapabilitiesCapabilities– Ball DetectionBall Detection– Goal DetectionGoal Detection– Rely on VisionRely on Vision
• Completed GoalsCompleted Goals– DoneDone– DoneDone– Walls OK, Corners ToughWalls OK, Corners Tough– No Defense No Defense
Offense OnlyOffense Only– DoneDone– DoneDone– GreatGreat
No SonarNo Sonar• ExtensionsExtensions– SpeedSpeed– Wireless Communication for team playWireless Communication for team play– Possible Commercial Toy Lego DevelopmentPossible Commercial Toy Lego Development

DemoDemo
• Later we’ll step outside for the demo at our Later we’ll step outside for the demo at our HockeyBot Arena.HockeyBot Arena.
• Hockey has a Zamboni, HockeyBots have a Hockey has a Zamboni, HockeyBots have a Roomba!Roomba!
• Remember to be a Cielguard fan!Remember to be a Cielguard fan!• www.cielguard.comwww.cielguard.com
– Robot MoviesRobot Movies– Java DocumentationJava Documentation– Jar FilesJar Files– Everything we’ve doneEverything we’ve done
Questions? Questions?