class2
DESCRIPTION
prmTRANSCRIPT
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 1/47
CS 326 A: Motion PlanningCS 326 A: Motion Planninghttp://robotics.stanford.edu/~latombe/cs326/2002
Configuration Space –Configuration Space –Basic Path-Planning MethodsBasic Path-Planning Methods
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 2/47
What is a Path?What is a Path?

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 3/47
ool: Configuration Spaceool: Configuration Space!C-Space C"!C-Space C"

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 4/47
q=(q1,…,qn)
Configuration SpaceConfiguration Space
qq11
qq22
qq33
qqnn

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 5/47
#efinition#efinition
A robot configuration is a specificationof the positions of all robot points
relative to a fixed coordinate syste
!sually a configuration is expressed as
a "vector# of position$orientationparaeters
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 6/47
reference point
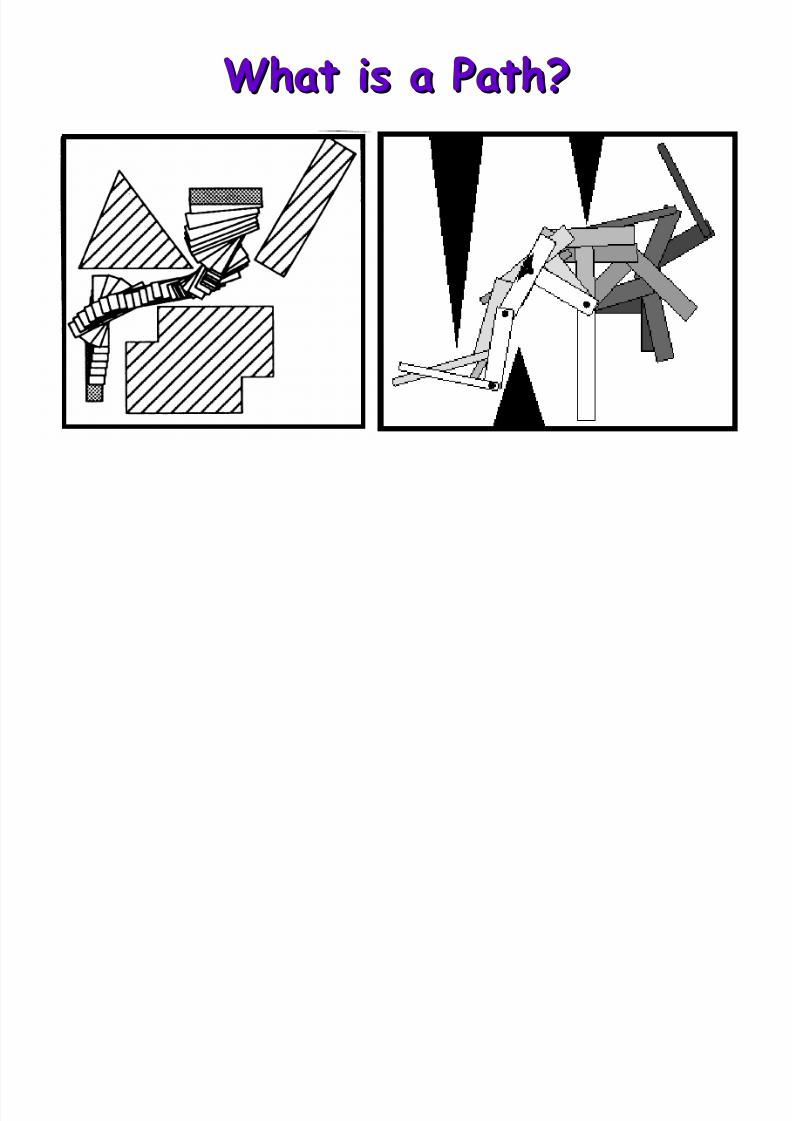
$igid $o%ot &'a(ple$igid $o%ot &'a(ple
% 3¶eter representation' q = (x,y,θ)% n a 3& *or+space q *ould be of the for
(x,y,,α,β,γ )
'
) θ
robotreference direction
*or+space
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 7/47
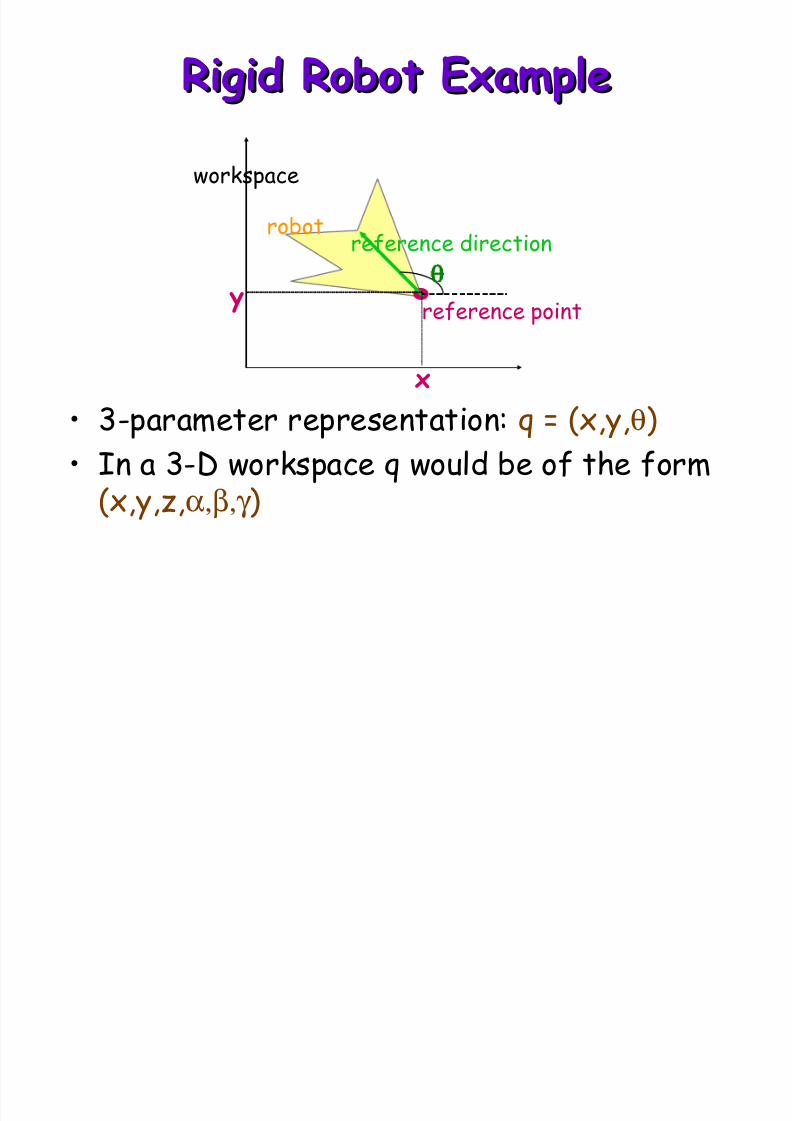
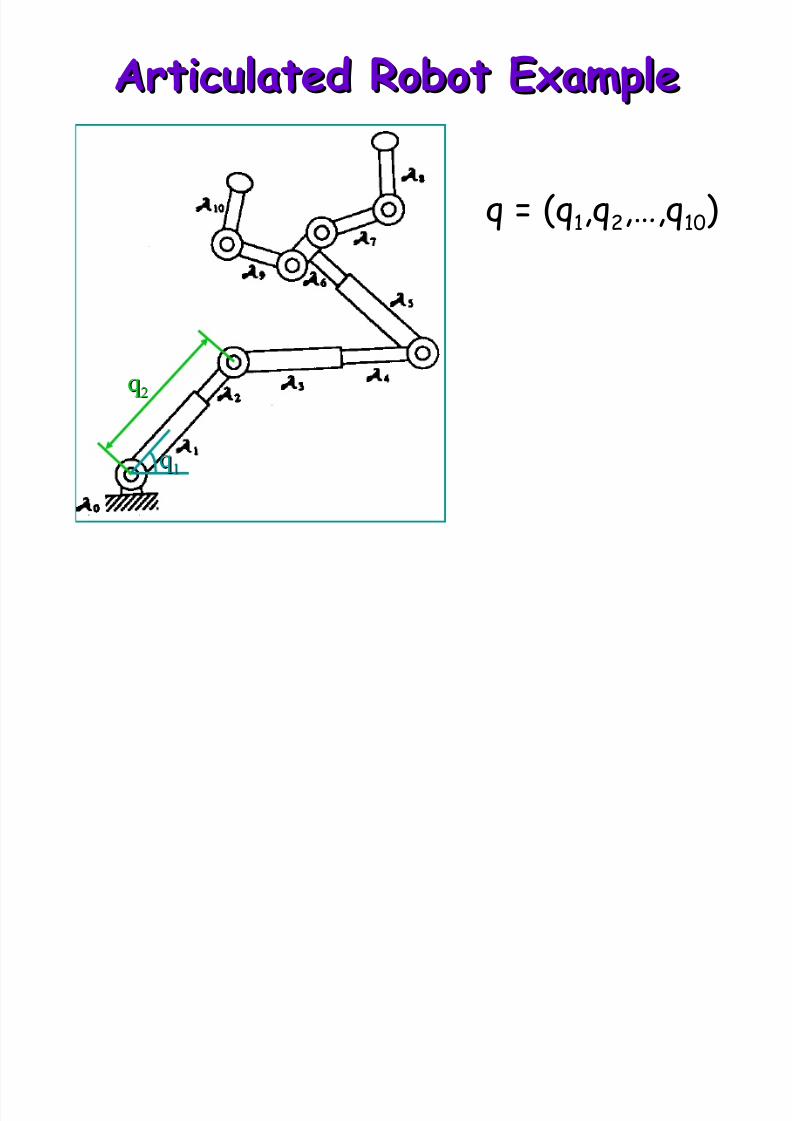
Articulated $o%ot &'a(pleArticulated $o%ot &'a(ple
qq11
qq22
q = (q1,q2,…,q1-)

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 8/47
Configuration Space of a $o%otConfiguration Space of a $o%ot
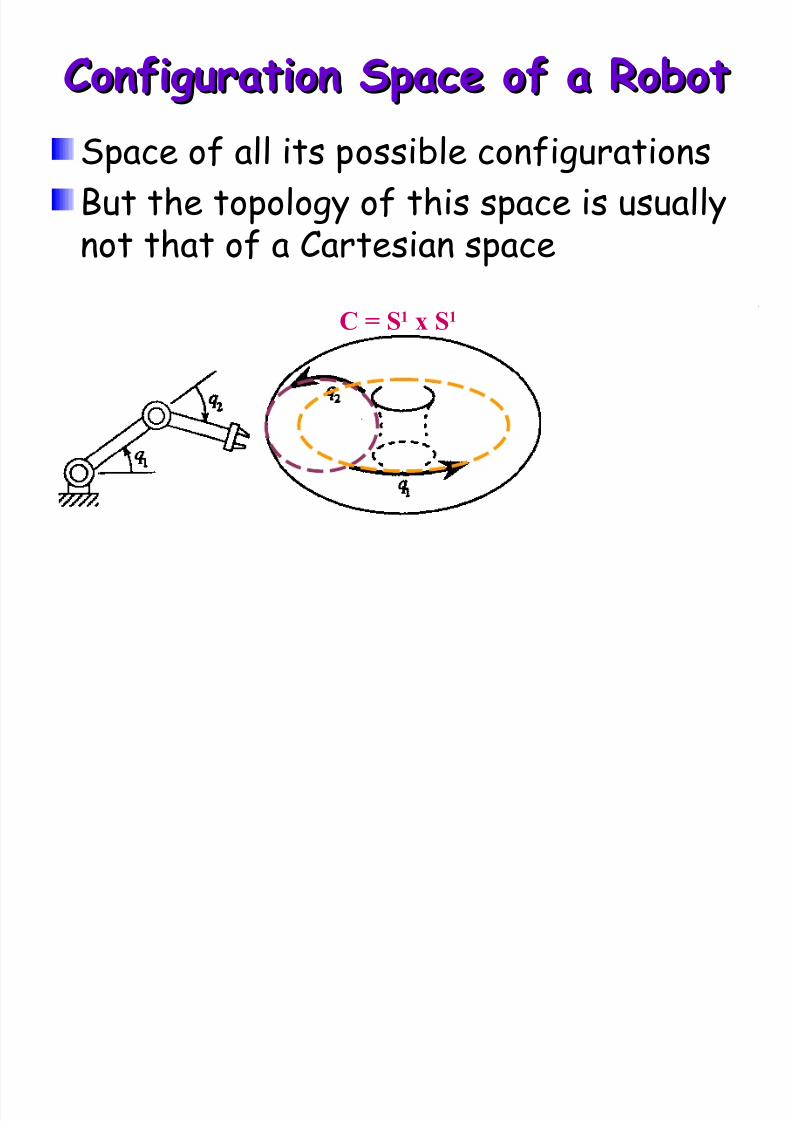
.pace of all its possible configurations/ut the topology of this space is usuallynot that of a 0artesian space
C = S1 x S1
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 9/47
Configuration Space of a $o%otConfiguration Space of a $o%ot
.pace of all its possible configurations/ut the topology of this space is usuallynot that of a 0artesian space
C = S1 x S1

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 10/47
Configuration Space of a $o%otConfiguration Space of a $o%ot
.pace of all its possible configurations/ut the topology of this space is usuallynot that of a 0artesian space
C = S1 x S1
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 11/47
Structure of Configuration SpaceStructure of Configuration Space
t is a anifoldor each point q, there is a 1&to&1 apbet*een a neighborhood of q and a
0artesian space R n, *here n is thediension of 0
his ap is a local coordinate syste
called a chart0 can al*ays be covered by a finite nuberof charts .uch a set is called an atlas

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 12/47
&'a(ple&'a(ple
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 13/47
reference point
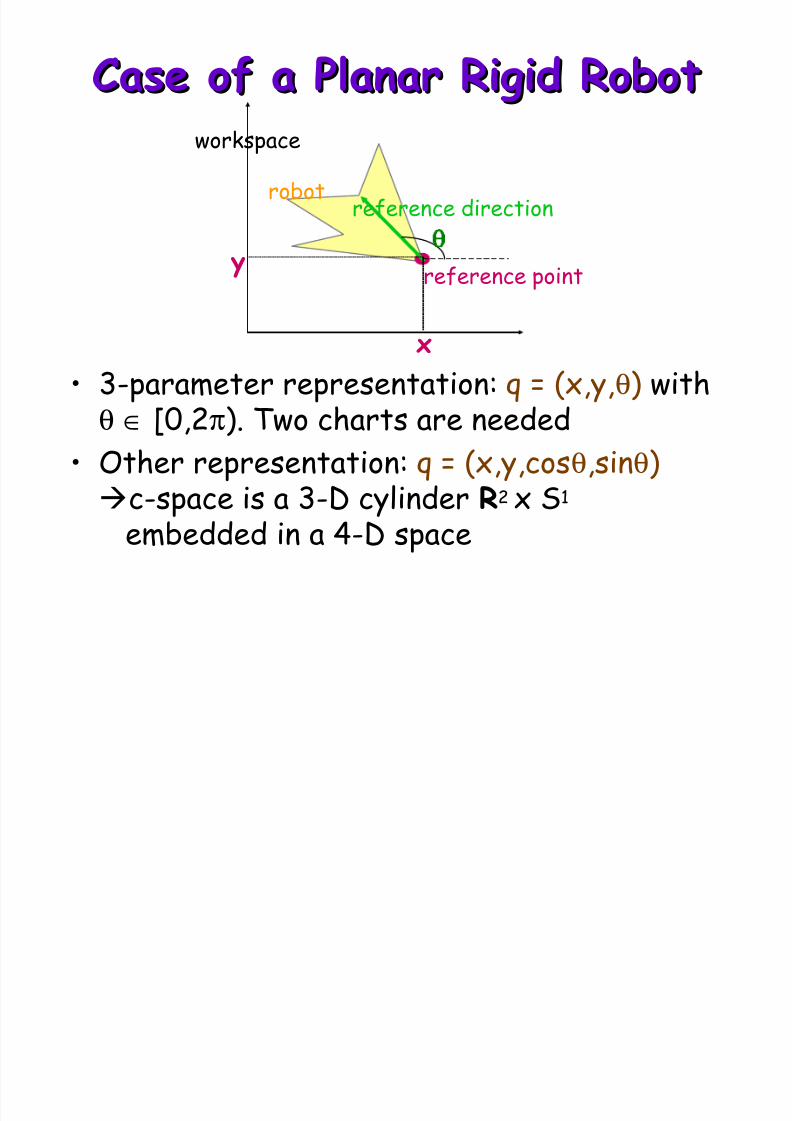
Case of a Planar $igid $o%otCase of a Planar $igid $o%ot
% 3¶eter representation' q = (x,y,θ) *ith
θ ∈ 4-,2π) *o charts are needed% 5ther representation' q = (x,y,cosθ,sinθ)c&space is a 3& cylinder $2 x .1
ebedded in a 6& space
'
) θ
robotreference direction
*or+space

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 14/47
$igid $o%ot in 3-# Wor*space$igid $o%ot in 3-# Wor*space
% q = (x,y,,α,β,γ )
% 5ther representation' q = (x,y,,r11,r12,…,r33) *herer11, r12, …, r33 are the eleents of rotation atrix7' r11 r12 r13
r21 r22 r23
r31 r32 r33
*ith' 8 ri129ri229ri32 = 18 ri1r :1 9 ri2r2: 9 ri3r :3 = -8 det(7) = 91
he c&space is a ;& space (anifold) ebeddedin a 12& 0artesian space t is denoted by 73x.5(3)
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 15/47
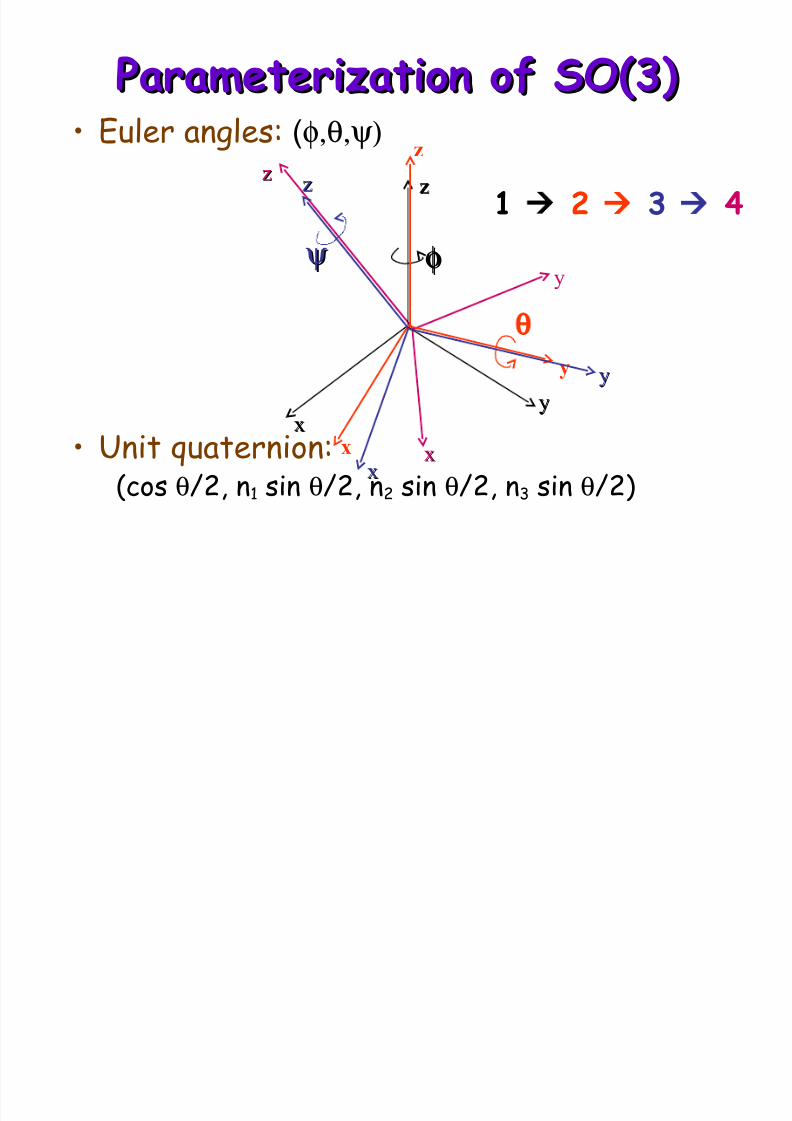
Para(eteri+ation of S,!3"Para(eteri+ation of S,!3"
% <uler angles' (φ,θ,ψ)
% !nit quaternion' (cos θ$2, n1 sin θ$2, n2 sin θ$2, n3 sin θ$2)
xx
y
zz
xxyy
zz
φφ
x
y
z
θ
xx
yy
zz
ψ ψ
2 3 .
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 16/47
Metric in Configuration SpaceMetric in Configuration Space
A etric or distance function d in 0 is a apd' (q1,q2) ∈ 02 d(q1,q2) -
such that'
8 d(q1,q2) = - if and only if q1 = q2
8 d(q1,q2) = d (q2,q1)
8 d(q1,q2) > d(q1,q3) 9 d(q3,q2)
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 17/47
Metric in Configuration SpaceMetric in Configuration Space
&'a(ple:% 7obot A and point x of A
% x(q)' location of x in the *or+space *hen A isat configuration q
% A distance d in 0 is defined by'd(q,q?) = axx∈A @@x(q)&x(q?)@@
*here @@a & b@@ denotes the <uclidean distancebet*een points a and b in the *or+space
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 18/47
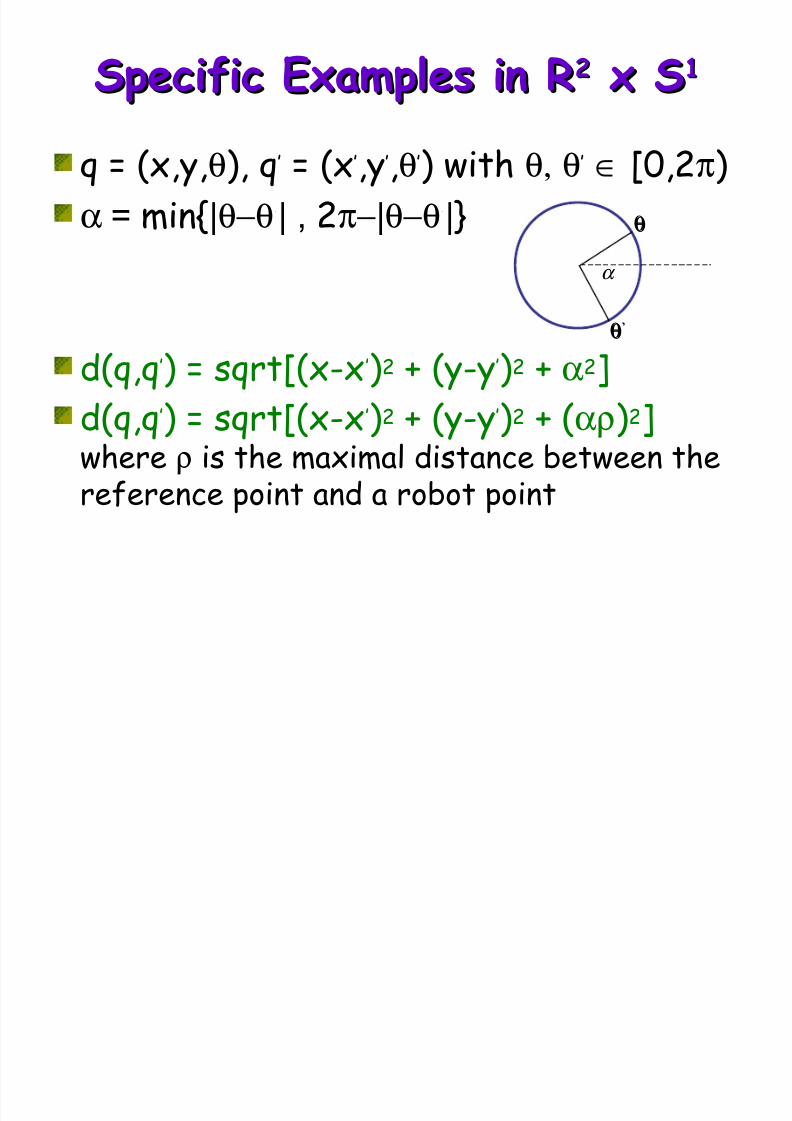
Specific &'a(ples in $Specific &'a(ples in $22 ' S' S
q = (x,y,θ), q? = (x?,y?,θ?) *ith θ, θ? ∈ 4-,2π)
α = in|θ−θ’| , 2π−|θ−θ’|B
d(q,q?) = sqrt4(x&x?)2 9 (y&y?)2 9 α2C
d(q,q?) = sqrt4(x&x?)2 9 (y&y?)2 9 (αρ)2C*here ρ is the axial distance bet*een thereference point and a robot point
θθ’’
θθ
α

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 19/47
/otion of a Path/otion of a Path
A path in 0 is a piece of continuous curveconnecting t*o configurations q and q?'τ
' s ∈ 4-,1C τ (s) ∈ 0 s? → s ⇒ d(
τ
(s),τ
(s?)) → -
q1
q3
q0
qn
q4
q2
τ(s)
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 20/47
,ther Possi%le Constraints on Path,ther Possi%le Constraints on Path
inite length, soothness, curvature, etc… A tra:ectory is a path paraeteried by tie'
τ
' t ∈ 4-,C τ
(t) ∈ 0
q1
q3
q0
qn
q4
q2
τ(s)

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 21/47
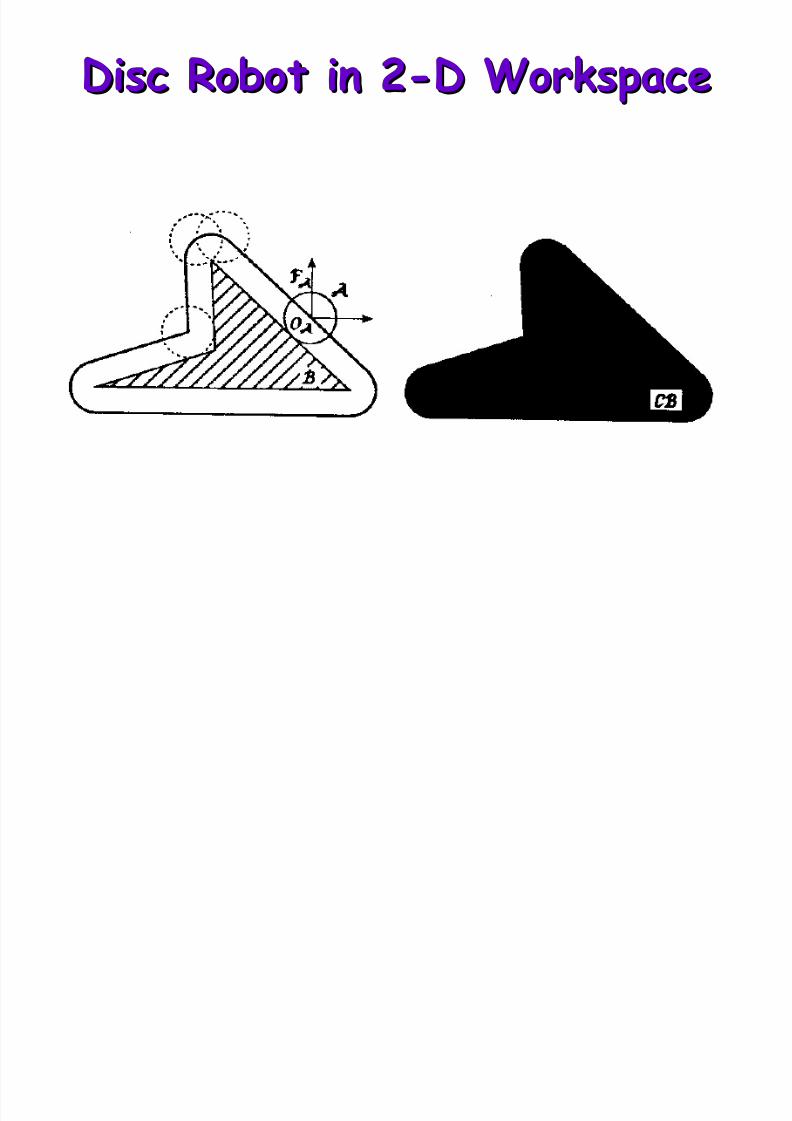
,%stacles in C-Space,%stacles in C-Space
A configuration q is collision&free, or free, if therobot placed at q has null intersection *ith theobstacles in the *or+space
he free space is the set of freeconfigurations
A 0&obstacle is the set of configurations *herethe robot collides *ith a given *or+space
obstacleA configuration is sei&free if the robot at thisconfiguration touches obstacles *ithout overlap
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 22/47
#isc $o%ot in 2-# Wor*space#isc $o%ot in 2-# Wor*space

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 23/47
$igid $o%ot ranslating in 2-#$igid $o%ot ranslating in 2-#
CB 0 B A 0 1%-a a∈A %∈B4
a1
b1
b1&a1

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 24/47
5inear-i(e Co(putation of5inear-i(e Co(putation ofC-,%stacle in 2-#C-,%stacle in 2-#
(convex polygons)

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 25/47
$igid $o%ot ranslating and$igid $o%ot ranslating and$otating in 2-#$otating in 2-#
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 26/47
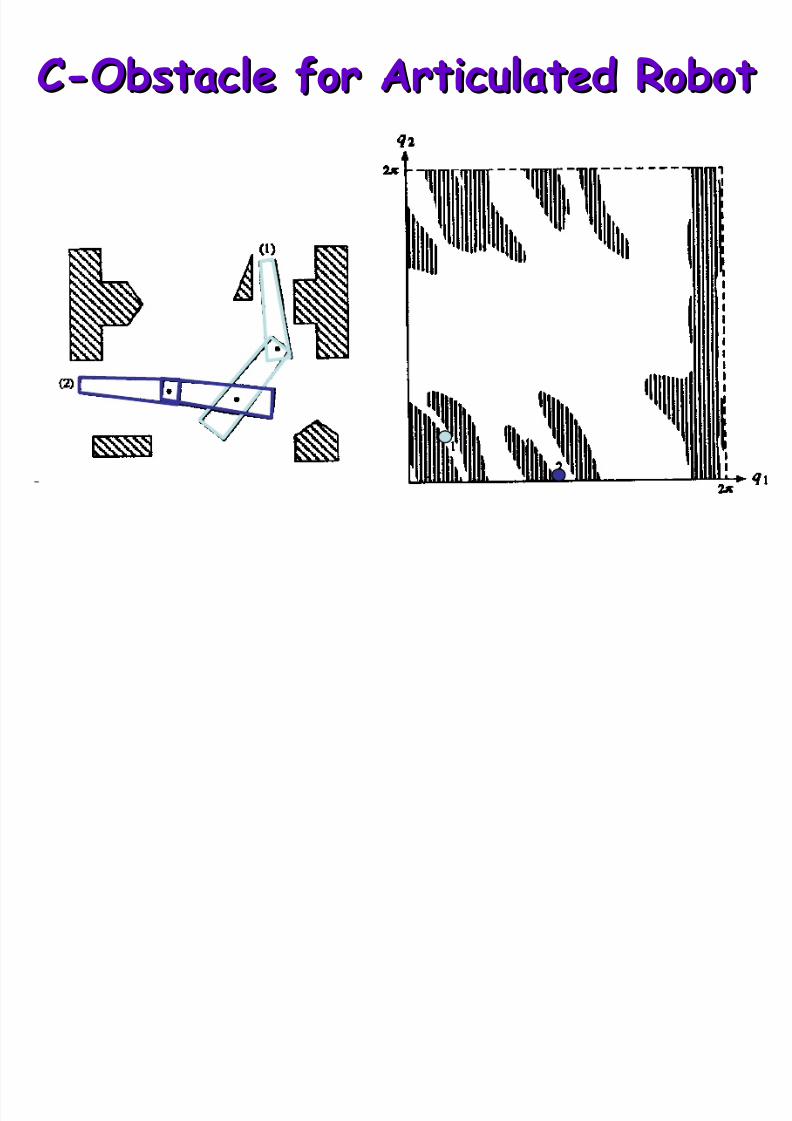
C-,%stacle for Articulated $o%otC-,%stacle for Articulated $o%ot

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 27/47
ree and .ei&ree Dathsree and .ei&ree Daths
A free path lies entirely in the freespace
A sei&free path lies entirely in thesei&free space
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 28/47
$e(ar* on ree-Space opolog)$e(ar* on ree-Space opolog)
% he robot and the obstacles are odeled asclosed subsets, eaning that they contain theirboundaries
% 5ne can sho* that the 0&obstacles are closed
subsets of the configuration space 0 as *ell% 0onsequently, the free space is an open subset
of 0 Eence, each free configuration is the centerof a ball of non&ero radius entirely contained in
% he sei&free space is a closed subset of 0 tsboundary is a superset of the boundary of

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 29/47

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 30/47

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 31/47
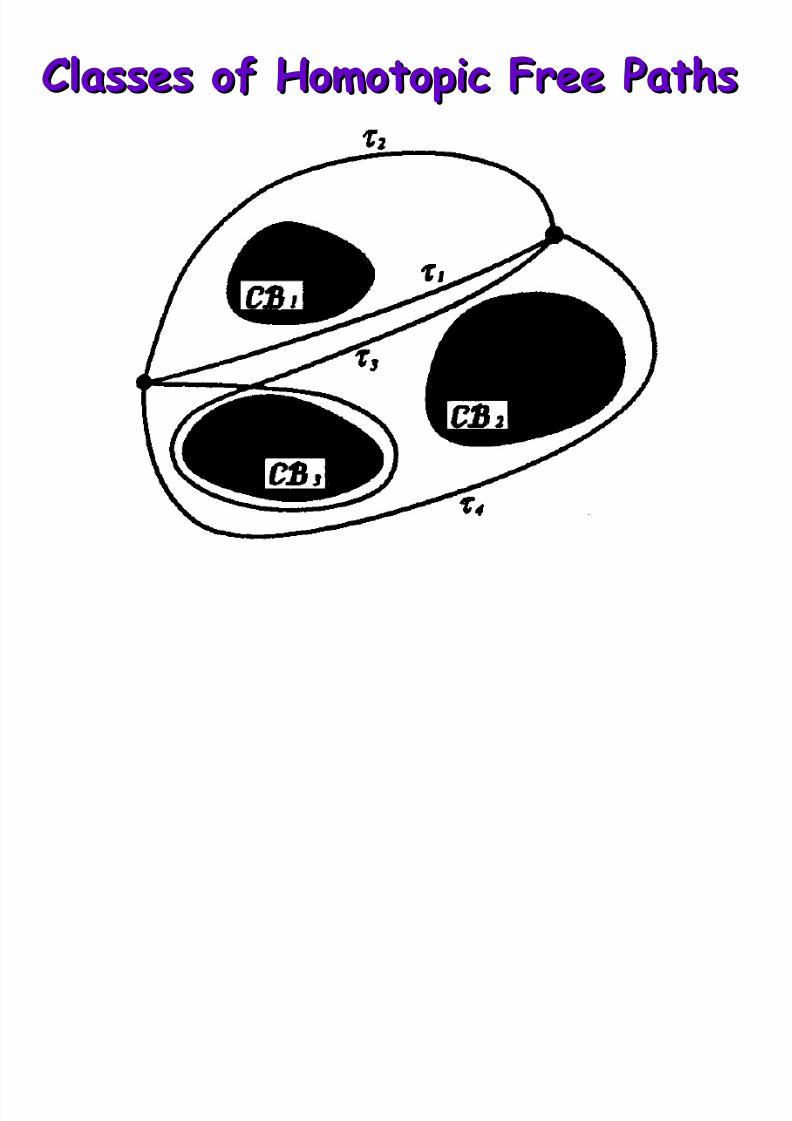
/otion of 7o(otopic Paths/otion of 7o(otopic Paths
*o paths *ith the sae endpoints arehootopic if one can be continuously deforedinto the other
7 x .1 exaple'
τ
1 and τ2 are hootopicτ1 and
τ3 are not hootopic
n this exaple, infinity of hootopy classes
8
89
τ
τ
τ
3

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 32/47
Connectedness of C-SpaceConnectedness of C-Space
0 is connected if every t*o configurations can beconnected by a path
0 is siply&connected if any t*o paths
connecting the sae endpoints are hootopic<xaples' $2 or $3
5ther*ise 0 is ultiply&connected<xaples' .1 and .5(3) are ultiply& connected'& n .1, infinity of hootopy classes& n .5(3), only t*o hootopy classes
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 33/47
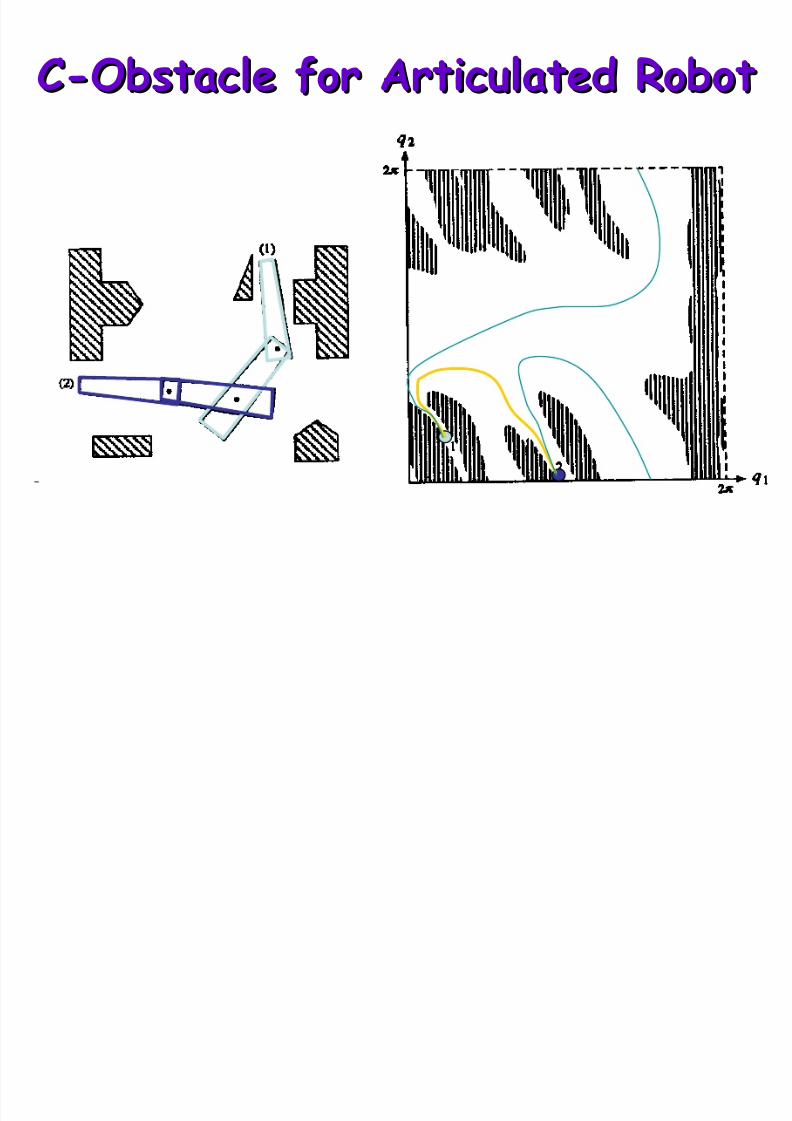
C-,%stacle for Articulated $o%otC-,%stacle for Articulated $o%ot
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 34/47
Classes of 7o(otopic ree PathsClasses of 7o(otopic ree Paths

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 35/47
Motion-Planning ra(eor*Motion-Planning ra(eor*
0ontinuous representation(configuration space forulation)
iscretiation
Fraph searching(blind, best&first, AG)

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 36/47
Path-Planning ApproachesPath-Planning Approaches
; $oad(ap7epresent the connectivity of the free spaceby a net*or+ of 1& curves
2; Cell deco(positionecopose the free space into siple cellsand represent the connectivity of the freespace by the ad:acency graph of these cells
3; Potential fieldefine a function over the free space thathas a global iniu at the goal configurationand follo* its steepest descent

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 37/47
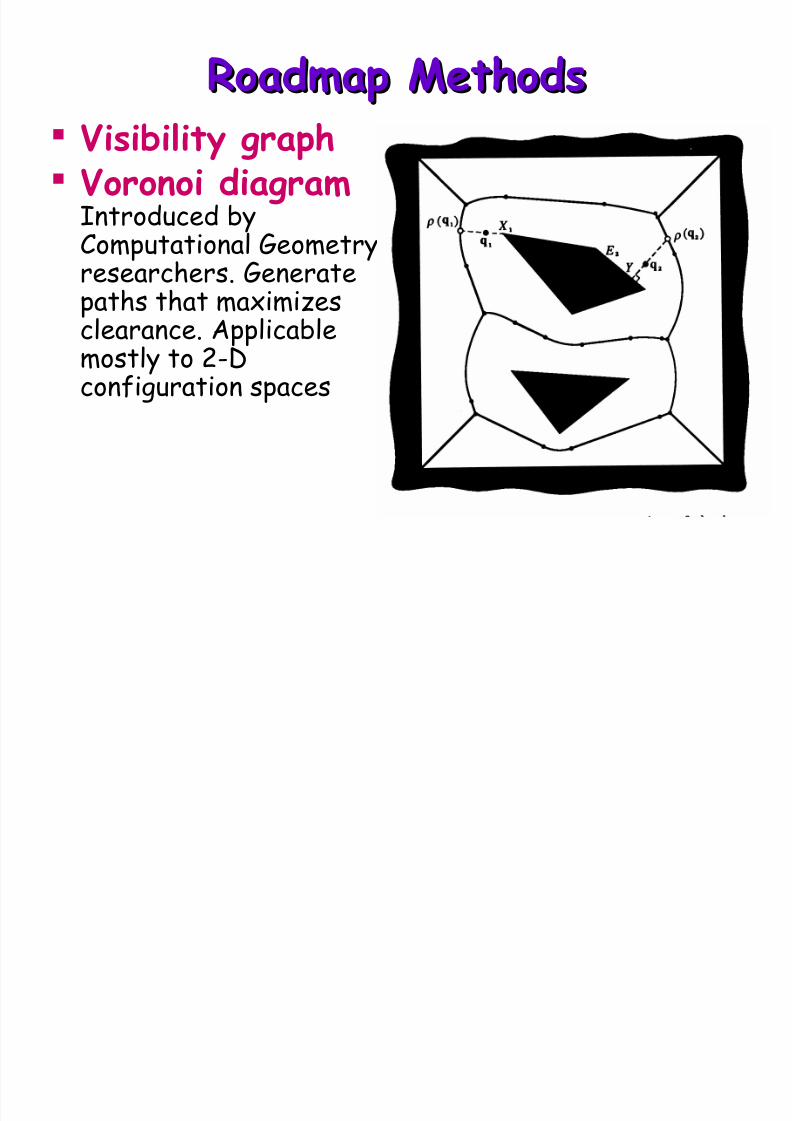
$oad(ap Methods$oad(ap Methods
<isi%ilit) graphntroduced in the.ha+ey pro:ect at.7 in the late ;-s
0an produceshortest paths in 2& configurationspaces
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 38/47
$oad(ap Methods$oad(ap Methods
<isi%ilit) graph <oronoi diagra(
ntroduced by0oputational Feoetry
researchers Feneratepaths that axiiesclearance Applicableostly to 2&configuration spaces

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 39/47
$oad(ap Methods$oad(ap Methods
<isi%ilit) graph <oronoi diagra( Silhouette
irst coplete general ethod that applies tospaces of any diension and is singly exponentialin H of diensions 40anny, IJC
Pro%a%ilistic road(aps

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 40/47
Path-Planning ApproachesPath-Planning Approaches
; $oad(ap7epresent the connectivity of the free spaceby a net*or+ of 1& curves
2; Cell deco(positionecopose the free space into siple cellsand represent the connectivity of the freespace by the ad:acency graph of these cells
3; Potential fieldefine a function over the free space thathas a global iniu at the goal configurationand follo* its steepest descent

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 41/47
Cell-#eco(position MethodsCell-#eco(position Methods
*o failies of ethods' <xact cell decoposition
he free space is represented by a
collection of non&overlapping cells *hoseunion is exactly <xaples' trapeoidal and cylindrical
decopositions

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 42/47
rape+oidal deco(positionrape+oidal deco(position

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 43/47
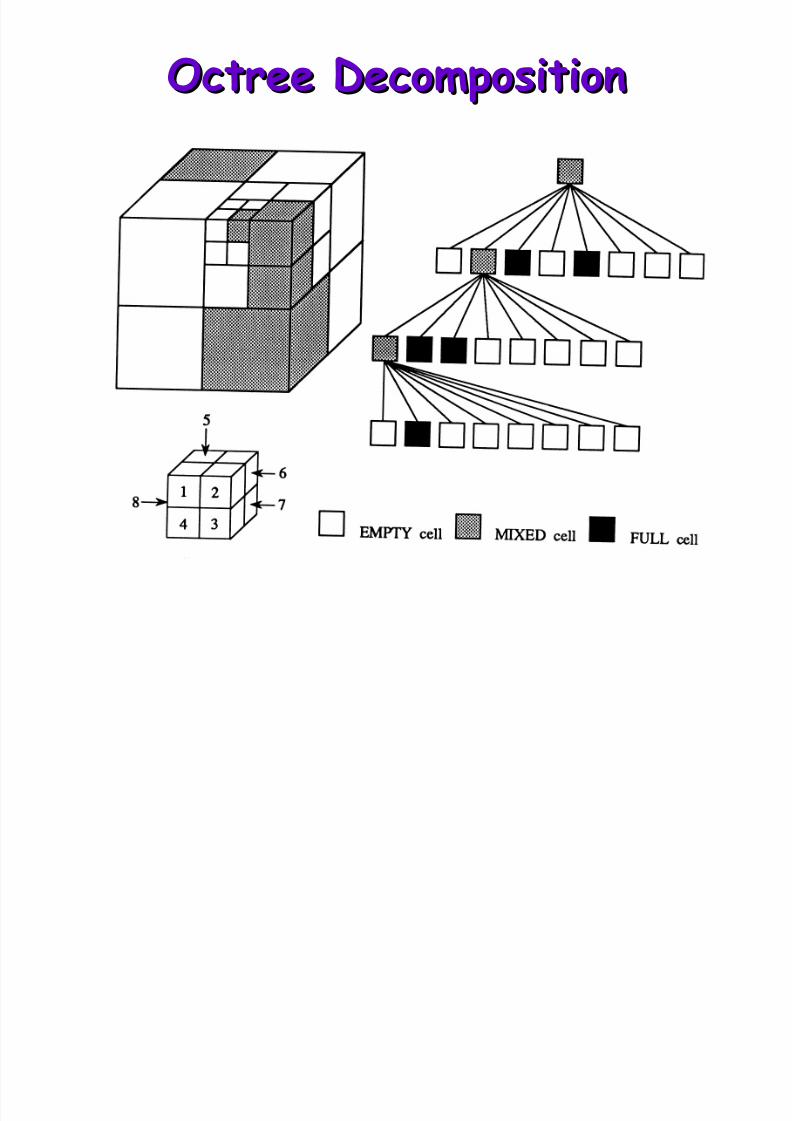
Cell-#eco(position MethodsCell-#eco(position Methods
*o failies of ethods' <xact cell decoposition Approxiate cell decoposition
is represented by a collection of non&overlapping cells *hose union is containedin
<xaples' quadtree, octree, 2n
&tree
7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 44/47
,ctree #eco(position,ctree #eco(position

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 45/47
Path-Planning ApproachesPath-Planning Approaches
; $oad(ap7epresent the connectivity of the free spaceby a net*or+ of 1& curves
2; Cell deco(positionecopose the free space into siple cellsand represent the connectivity of the freespace by the ad:acency graph of these cells
3; Potential fieldefine a function over the free space thathas a global iniu at the goal configurationand follo* its steepest descent

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 46/47
Potential ield MethodsPotential ield Methods
Approach initially proposed for real&tiecollision avoidance 4Khatib, I;C Eundreds ofpapers published on this topic
Dotential field' .calar function over the freespace deal field (navigation function)' .ooth, global
iniu at the goal, no local inia, gro*s to
infinity near obstacles orce applied to robot' Legated gradient of the
potential field Al*ays ove along that force

7/17/2019 class2
http://slidepdf.com/reader/full/class2-568bd499ce10c 47/47
Goal
Robot
Attracti=e>$epulsi=e ieldsAttracti=e>$epulsi=e ields
)( Goal pGoal x xk F −−=
>
≤∂∂ −=
0
02
0
0
,111
ρ ρ
ρ ρ ρ ρ ρ ρ
η
if
if x F Obstacle
Khatib, 1MI;
oal
$o%ot
Dath planning'
& 7egular grid F is placed over 0&space& F is searched using a best&first algorith *ith potential field as the heuristic function