coming out of the woodwork: post-newtonian approximations and...
TRANSCRIPT

Monash University
MTH3000 Research Project
Coming out of the woodwork:Post-Newtonian approximations and
applications
Author:Justin Forlano
Supervisor:Dr. Todd Oliynyk
March 25, 2015

Contents
1 Introduction 2
2 The post-Newtonian Approximation 52.1 The Relaxed Einstein Field Equations . . . . . . . . . . . . . . . . . . . . . 52.2 Solution Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3 Zones of Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.4 Multi-pole Expansions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.5 The first post-Newtonian potentials . . . . . . . . . . . . . . . . . . . . . . 172.6 Alternate Integration Methods . . . . . . . . . . . . . . . . . . . . . . . . . 24
3 Equations of Motion and the Precession of Mercury 283.1 Deriving equations of motion . . . . . . . . . . . . . . . . . . . . . . . . . . 283.2 Application to precession of Mercury . . . . . . . . . . . . . . . . . . . . . . 33
4 Gravitational Waves and the Hulse-Taylor Binary 384.1 Transverse-traceless potentials and polarisations . . . . . . . . . . . . . . . 384.2 Particular gravitational wave fields . . . . . . . . . . . . . . . . . . . . . . . 424.3 Effect of gravitational waves on space-time . . . . . . . . . . . . . . . . . . . 464.4 Quadrupole formula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484.5 Application to Hulse-Taylor binary . . . . . . . . . . . . . . . . . . . . . . . 524.6 Beyond the Quadrupole formula . . . . . . . . . . . . . . . . . . . . . . . . 56
5 Concluding Remarks 58
A Appendix 63A.1 Solving the Wave Equation . . . . . . . . . . . . . . . . . . . . . . . . . . . 63A.2 Angular STF Tensors and Spherical Averages . . . . . . . . . . . . . . . . . 64A.3 Evaluation of a 1PN surface integral . . . . . . . . . . . . . . . . . . . . . . 65A.4 Details of Quadrupole formula derivation . . . . . . . . . . . . . . . . . . . 66
1

Chapter 1
Introduction
Einstein’s General theory of relativity [1] was a bold departure from the widely successfulNewtonian theory. Unlike the Newtonian theory written in terms of fields, gravitationis a geometric phenomena, with space and time forming a space-time manifold that isdeformed by the presence of matter and energy. The deformation of this differentiablemanifold is characterised by a symmetric metric, and freely falling (not acted on by exter-nal forces) particles will move along geodesics of this manifold as determined by the metric.Although this notion of curved spaces is an elegant picture, when we seek to understand itat a mathematical level we naturally need some way of describing this manifold through acoordinate system. Crucially, gravity is associated with actual curved space-time, that isto say we should not be able to make a global coordinate transformation so that in anotherdescription the space is no longer curved. This is why the foundations of general relativityare built on a covariant formalism, where their form is invariant under coordinate trans-formations. Tensors are therefore unavoidable in the mathematics since tensor equationshave this invariance property and when one wishes to impose a certain coordinate system,it is relatively straightforward to do so. This is in stark contrast to the Newtonian theory,where it is difficult to describe systems in anything other than Cartesian coordinates.
Unfortunately the price we pay for such coordinate freedom is that the equationsdealt with are far more challenging to solve exactly. The Einstein field equations whichgovern how the space-time is curved, take the form of 6 independent, non-linear, coupledpartial differential equations. Apart from the most idealised geometries such as sphericalsymmetry where exact solutions exist (the Schwarzschild metric [2] for instance), we mustinstead resort to approximations. There are many different approaches ranging from thepost-Newtonian approximation (PN), perturbation approaches which assume one mass ismuch larger than the other masses and the field of numerical relativity which seeks toobtain solutions to the field equations for complicated systems computationally.
Here we consider the post-Newtonian method which proceeds iteratively generatingever higher order approximations. As the name suggests, the lowest order result is theNewtonian gravitational potentials. The next iteration obtains the first post-Newtonianorder which is labelled as 1PN and represents a first correction past Newtonian gravity.After this one can then obtain higher post-Newtonian corrections such as 2PN, 3PN andso on. In this scheme there are two main assumptions: firstly that the gravitational fieldsare weak which is to say that they are dominated by the Newtonian order potentialsand secondly that the velocities of the system are small enough to allow the weak gravityassumption to hold. This is known collectively as a weak field, slow motion approximation.The weak field approximation can be made by considering the metric as a sum of the flat-space, unperturbed Minkowski metric plus an additional term which describes deviationsfrom this. By slow motion, we mean that the dimensionless parameter ε := vT /c 1 wherevT is some characteristic velocity of the system and c is the speed of light in vacuum. Here
2

Chapter 1
ε can be thought of as the “slowness” of the system, a larger ε implies a more vigorouslymoving system. This allows us to then consider the metric to be expanded in powers of εwhile the limit as ε→ 0 is to recover the Newtonian equations. An example is the case of abinary system where the post-Newtonian approximation seeks to determine the equationsof motion (they give accelerations in terms of positions and velocities) of the bodies to ahigh order. The relative acceleration of the bodies can be schematically expanded as
a =Gm
r2
−n+ ε2A1PN + ε3A1.5PN + ε4A2PN + ε5A2.5PN + ε6A3PN + ε7A3.5PN + · · ·
,
(1.0.1)where m := m1 +m2, r := |x1−x2| and n := (x1−x2)/r. We can see that the Newtonianlevel is obtained when ε → 0 and the higher order terms represent corrections past theNewtonian order given by approximations to General relativity. One can also include spineffects in this expansion, for instance as is done by Will [3] in the context of the directintegration of the relaxed field equation (DIRE) approach to post-Newtonian theory. Thisis allows the orbiting bodies to have some intrinsic angular momentum, much like how theEarth rotates about its own axis as it orbits the sun. The spin effects are first noticeable atthe 1PN order where the spin can couple to the orbital angular momentum. The equationsof motion to 1PN order for N - orbiting bodies was given by Eisntein, Infeld and Hoffmanin 1938 [4]. At the other end of the scale are the highest completed calculations to 3.5PNorder which have been tackled by Pati and Will [5], Futamese and Itoh [6,7], Blanchet [8]and 4PN Hamiltonians have been found [9]. The search for higher orders is complicatedbecause the number of terms appearing in each PN term of (1.0.1) increases dramatically.The number of terms in the metric potentials at 1PN order is 10, at 2PN it is around 100terms, and the 3PN is of the order of 103 ∼ 104 terms. Going to 4PN requires handlingtens of thousands of terms, which is a hugely challenging task.
A prediction of general relativity is that freely orbiting bodies are not stable forever.They in fact emit energy through gravitational radiation which gradually causes the bodiesto spiral inwards towards closer orbits before plunging together in a coalescence phase. Asthey inspiral, the velocities increase so ε will in fact not be uniform forever, it will increasein this case. This implies that the post-Newtonian corrections can in fact become largerthan the Newtonian terms which causes a breakdown of the Newtonian limit as the systemmoves to relativistic orbits. The effect of emitted gravitational waves on the system itselfwhich is known as radiation-reaction is first seen at the 2.5PN order which is at O(ε5) in(1.0.1). The most likely sources for the detection of gravitational radiation are compactbinary systems such as orbiting black holes or neutron stars because of the closeness oftheir orbits and large masses. The compact binary case is especially useful as tidal effectscan be neglected for much of the motion right up until the close inspiral.
The existence of gravitational waves is perhaps the greatest as yet undetected predic-tion of general relativity and is a large reason why the PN formulation exists at all. Justas matter curves space-time, it is possible that for accelerating, non-spherically symmetricsystems, such as a compact binary or the violent collision between two black holes, pro-cesses such as these can form propagating waves in the space-time. This prediction waslargely theoretical until a gradual shift in the technological capability around the 1980’sopened up the possibility of detecting these waves. The experimental difficulty is that theamplitude of a gravitational wave is extremely small, even for a binary black hole system.The effects felt in a detector are on the order of one part in 1022. Modern gravitationalwave detectors such as LIGO and VIRGO have to not only be built with sensitivitiesin this range but they must also contend with numerous sources of noise which obscuresthe true signal. The noise ranges from the small: thermal noise and quantum effects, tothe large scale, such as seismic noise. The goal of the post-Newtonian approximationsis to provide wave templates which are theoretically derived waveforms written in terms
3

Chapter 1
of some observable parameters such as masses of bodies, orbital frequency and distanceto source. These waveforms can then be used to sift the true signal from the noisy dataobserved. These waveforms are computed in the far-field of the source and are expressedin terms of the orders as
hij =4G
c2r
Qij +Qij0.5PN +Qij1PN +Qij1.5PN +Qij2PN +Qij2.5PN +Qij3PN +Qij3.5PN + · · ·
.
(1.0.2)The lowest order term, Qij is in fact the quadrupole which leads to the quadrupole formula.It is this reason why the qaudrupole formula is sometimes considered as a Newtonian termeven though it appears nowhere in Newtonian gravity. The inspiral of compact binariescan be quite relativistic with velocities approaching 0.5c. At this point in the systemevolution, the gravitational wave amplitude is around its maximum so it can potentiallybe registered by a detector on Earth. However the quadrupole formula is likely to give apoor prediction for this system because of a necessity of accurate time evolution which isonly available starting at the 3PN order, or Qij3PN in (1.0.2). This precise time evolutionis required by the detectors such as LIGO and VIRGO. In fact, the higher order one canachieve past 3PN, the more accurately the true signal can be extracted from the noise.This is the major motivation for proceeding to ever higher order expressions.
The plan of this paper is as follows. In chapter two we introduce the Landau-Lifshitzharmonic formulation of the Einstein field equations [10] which is a much better way tostudy the post-Newtonian expansion and also puts gravitational waves at ones fingertips.We then proceed by describing in detail how the PN method works in practice as an εmatching scheme. We then use these general results to consider the 1PN potentials foran N -body point particle system. We then with a look at many other techniques foremploying a post-Newtonian expansion. We also look at the 1PN equations of motionand how they can be derived in two ways: a Lagrangian and a surface integral approach.Chapter 3 we then begin to discuss the formalism and generation of gravitational waves.Specifically we see that we can impose a transverse-traceless gauge on the waveforms whichdrastically simplifies the calculations. We then apply the results of the linearised theory ofgravity to deduce the existence of plane gravitational waves in vacuum and waves emittedfrom a binary system. This then transitions into the slightly more physical discussion ofhow gravitational waves actually affect space-time, where we find it is due to stresses andstrains in a system. We then reach the pinnacle of the lowest order gravitational wavetheory which is the quadrupole formula for radiation emission. The quadrupole formulagives the rate that energy is emitted from a system. From this, we apply it to the binarysystem PSR1931+16, the famous Hulse-Taylor binary, which gives excellent agreementwith experimental observations. We then have a brief look at expression that go beyondthe quadrupole formula to higher orders.
The conventions used herein include an event in space-time being labelled by thecoordinates xα = (x0,xa) = (ct, x1, x2, x3), where Greek indices run through all space-time values (i.e. through 0, 1, 2, 3, 4), and the corresponding Latin indices run onlythrough spatial components (i.e. 1, 2, 3) and c is the (constant) speed of light. Anotherconstant which will appear prominently is G, the gravitational constant. We use ηαβ :=diag(−1, 1, 1, 1) = ηαβ the Minkowski metric of flat space-time, g := det(gαβ), ∂α := ∂
∂xα
and gαβ is the contravariant form of the metric such that gαµgαν = δνµ. Finally we use a
multi-index notation for repeated products, where for example xQq := xq1xq2xq3 . . . xqn ,with the order of Q to be clear from the context in which it appears. Finally we notethat in Appendix A.2, we define our use of symmetric, trace-free tensors (STF) which arewritten with Ω and are used throughout.
4

Chapter 2
The post-NewtonianApproximation
In this chapter, we discuss the theoretical basis for the post-Newtonian expansions andsee how it is applied to find iterative solutions for the metric potentials. In Section 2.1,we present an extremely brief introduction to the governing equation of General rela-tivity, that is the Einstein field equations. However for the purposes of post-Newtonianapproximations, they will be transformed into an equation reminiscent of the wave equa-tion. These preliminaries are the foundational basis for the PN approximations and forthe study of gravitational waves. In Section 2.2, we discuss the a solution method this‘wave equation’ noting that the inherent non-linearities significantly complicate the mat-ter. With an integration approach sighted, Section 2.3 discusses the partitioning of theproblem into so called near and wave zones. In these zones, we may expand the requiredintegrals into sums of multi-poles which is the basis for Section 2.4. In Section 2.5, webegin to obtain the form of these metric potentials. At a zeroth order expansion, we findNewtonian theory indicating the internal consistency of this approach and of the fieldequations in general. We then discuss the 1PN order equations and apply them to thecase of an N -body, point particle system. Finally, Section 2.6 concludes this chapter witha brief look at the many different approaches to integrating the ‘wave-like’ equations thatcan be found in the literature.
2.1 The Relaxed Einstein Field Equations
All physical theories contain at least one dynamical variable which captures the state ofthe system; for example Newton’s Laws of motion contain the position vector, r(t), whileQuantum mechanics has the state vector |Ψ(t)〉. For the General Theory of Relativity,we have the metric tensor gαβ, which encapsulates the geometric structure of space-time.The equations which govern the form of the metric are Einstein’s Field Equations (EFE)1
Gαβ =8πG
c4Tαβ, (2.1.1)
where Gαβ := Rαβ− 12gαβR is the Einstein tensor, Rαβ is the Ricci tensor, R := gαβR
αβ isthe Ricci scalar, and Tαβ is the energy-momentum tensor which contains all the informa-tion related to the matter distribution. These form a system of 10 non-linear second-orderpartial differential equations for the components gαβ of the metric. By virtue of the Bianchi
1In general, the EFE contain an extra term linear in the metric with proportionality constant Λ. Thisis known as the cosmological constant. For post-Newtonian theory, we ignore this term due its smallmagnitude which is negligible for systems such as the solar-system and binary stars.
5

Chapter 2 2.1. THE RELAXED EINSTEIN FIELD EQUATIONS
identities, we also have the conservation equations
DβGαβ = 0, ⇒ DβT
αβ = 0, (2.1.2)
where the operator Dβ represents covariant differentiation with respect to the index β.These represent the conservation of energy and momentum. The Bianchi identies in factfurther reduce the number of independent equations in (2.1.1) down to just six. Since thespace-time manifold is parametrisable by four coordinates xµ, we see that we have twoextra free conditions which allows us to impose gauge constraints.
Unfortunately (2.1.1) in this form is not the optimal formulation for studying the post-Newtonian theory and gravitational waves. In light of this, we introduce the potentials
hαβ := ηαβ −√−ggαβ, (2.1.3)
along with imposing what is known as the harmonic or de Donder gauge conditions
∂βhαβ = 0. (2.1.4)
We can also write (2.1.3) as hαβ = ηαβ − gαβ where gαβ :=√−ggαβ is known as the
gothic inverse metric and is useful for intermediary calculations. The definition givenin (2.1.3) has the particularly nice interpretation in that the potentials represent theperturbations of the space-time relative to the flat Minkowskian background. It is alsoworth mentioning that from the definition in (2.1.3), knowledge of the potentials hαβ willcompletely determine the metric gαβ. The process for this involves finding hαβ, rearrangingfor√−ggαβ and noting that det(gαβ) = (
√−g)4/g = g and hence inverting gαβ to find
the metric gαβ. Inserting (2.1.3) into (2.1.1) and after utilising many times the gaugecondition of (2.1.4), we eventually arrive at an exact expression for the potentials whichis known as the relaxed EFE,
hαβ = −16πG
c4Λαβ, (2.1.5)
where = ηµν∂µν is the d’Alembertian wave operator. The right hand side of (2.1.5),contains the effective energy-momentum pseudo-tensor which is
Λαβ := (−g)(Tαβ + tαβLL + tαβH ), (2.1.6)
where we make the further definitions for the Landau-Lifshitz pseudo-tensor 2
(−g)tαβLL :=c4
16πG
gλµg
νρ∂νhαλ∂ρh
βµ +1
2gλµg
αβ∂ρhλν∂νh
ρµ − 2gµνgλ(α∂ρh
β)ν∂λhρµ
+1
8(2gαλgβµ − gαβgλµ)(2gνρgστ − gρσgντ )∂λh
ντ∂µhρσ
(2.1.7)
and the harmonic pseudo-tensor
(−g)tαβH :=c4
16πG
∂µh
αν∂νhβµ − hµν∂µνhαβ
. (2.1.8)
We can see that these are not tensors because they involve only regular derivatives, ∂µand not covariant derivatives. As a consequence of the harmonic gauge condition, we findthat the effective energy momentum tensor is conserved, i.e
∂βΛαβ = 0. (2.1.9)
2Brackets connecting indices such as g(αβgµν) denotes a symmetrization over those indices. In generalfor a rank-N contravariant tensor, T (αβ...ω) := 1
N !(Sum over permutations on indices α, β, . . . , ω).
6

Chapter 2 2.2. SOLUTION METHOD
This conservation can be split into two pieces, namely
∂βΛαβ = ∂β
[(−g)(Tαβ + tαβLL)
]+ ∂β
[(−g)tαβH
]= 0. (2.1.10)
A very short computation using the gauge condition of (2.1.4), reveals that ∂β(−g)tαβH = 0.
This says that (−g)tαβH is separately conserved independent of the total conservation ofΛαβ. Therefore we have a conservation equation of both the matter sources in Tαβ andfield sources tαβLL which is
∂β
[(−g)(Tαβ + tαβLL)
]= 0. (2.1.11)
This is an extremely important equation which is deeply related to total conservation ofmass-energy for both sources of matter and the gravitational field itself.
The wave equation of (2.1.5) is the main starting point for the post-Newtonian theory.It is worth mentioning that (2.1.5) is non-linear in h. For instance, if hαβ is a givensolution and ζαβ is some smooth tensor field, then the sum hαβ + ζαβ is not a solutioneven if ζαβ = 0. This is due to the quadratic terms hidden within the effective energy-momentum pseudo-tensor. Apart from the general covariance of this theory, the non-linearity of it is the first clear departure from Newtonian gravitational physics which isitself linear.
It is hard not to draw parallels between the formulation of GR presented and theequations governing electromagnetic (EM) phenomena due to Maxwell. In EM, the fun-damental entity is the four-potential A which is sourced by the four-current density j andthe relation is given (in cgs units) by
Aα =4π
cjα. (2.1.12)
To arrive at this wave equation, one has to impose the Lorentz gauge condition ∂αAα = 0
which is very similar to the de Donder gauge condition ∂βhαβ = 0. Indeed Aα in (2.1.12)
can be written as a retarded integral solution (see Section 2.2 for more on this) much likethe gravitational potentials. On the face of it, the key equations governing the two theoriesmay look similar but that is where it ends. The difference is, as discussed, the non-linearityof the field equations and this represents the grand departure from Newtonian mechanics.
2.2 Solution Method
In order to solve (2.1.5), we outline some extra hypothesis we require, as is discussed byBlanchet [8]. The first condition is that the matter distribution is entirely contained withinsome world tube T (S) = xα|r < S, −∞ < t <∞. As we will see, we assume the matteris deep within the near zone of the source. This condition imposes that Tαβ has spatiallycompact support (i.e. vanishes outside this world tube). Furthermore, we also require
that ∂β
[(−g)(tαβLL + tαβH )
]= 0 when r > S, which physically amounts to there being no
matter sourcing gravitational fields outside the compact support. Secondly, we assumethat the matter distribution within the source is smooth (Tαβ ∈ C∞(R3)), and thus freeof shocks. Thirdly, the source shall be post-Newtonian in nature as we will discuss now.
The post-Newtonian approximation involves imposing a ‘slow motion’ condition on thesystem such that its characteristic velocities are much less than the speed of light c. As wewill see, we need to formulate a process in which we can expand our governing equation (inthis case (2.1.5)) in an asymptotic expansion. For this we require some small parameterto expand about and for which successive approximations are accurate to higher orders inthis small parameter. A natural choice is to define
ε :=vTc, (2.2.1)
7

Chapter 2 2.2. SOLUTION METHOD
as our small parameter, where vT is the characteristic velocity of the system which ismuch less than c, under the ‘slow motion’ condition. The solutions we seek should thusbe parametrized in terms of ε and when ε→ 0, the Newtonian features of the system areto be found. Assuming the bodies are perfect fluids, then they are characterized by thedynamical variables which are the density ρ(x, t), pressure P (x, t), velocity v(x, t) and theNewtonian potential Φ(x, t). Under the governing equations of these variables, namely thePoisson equation, the continuity equation and the Euler equation, we have the followingscalings in terms of ε,
ρε(t, x) = ε2ρ(εt, x), (2.2.2)
Pε(t, x) = ε4P (εt, x), (2.2.3)
viε(t, x) = εvi(εt, x), (2.2.4)
Φε(t, x) = ε2Φ(εt, x). (2.2.5)
These say that our solutions are in fact invariant under such transformations as given bythe (2.2.2)-(2.2.5). Following Futamese [7]), we also introduce a scaled time
τ := εt, (2.2.6)
which represents a Newtonian dynamical time. For example, the period of a system withε = 0.01 is 10 times that of a system with ε = 0.1 since t = τ/ε. Since ε is the parameterthat defines the order of the expansions in our family of solutions, then it also plays ahelpful visual aid for spotting the terms of certain orders, as we shall see in Section 2.5.Under the scaling τ = εt, the scaling laws of (2.2.5) now suggest that
ρ(ct) = ε2ρ(cτ), (2.2.7)
ja(ct) = ε3ja(cτ), (2.2.8)
T ab(ct) = ε4T ab(cτ), (2.2.9)
where ja and T ab are related to T 0a and T ab respectively and will be expanded upon inSection 2.5. We now begin to differentiate between quantities written in terms of thedynamical time τ and the ordinary time t by the presence and absence of a ‘hat’ (e.g. ρ)respectively.
In appendix A.1, we found the retarded solution to the in-homogeneous wave equation.By comparison between (2.1.5) and (A.1.1) and use of (A.1.6), we propose a formal solutionto the relaxed field equations given by
hαβ(ct, x) =4G
c4
∫L(ct,x)
Λαβ(ct− |x− x′|,x′)|x− x′|
d3x′ + hαβH (ct, x). (2.2.10)
The homogeneous solution hαβH is typically suppressed in post-Newtonian approximations.There are a few arguments available which attempt to justify this. The first is the wellknown ‘no-incoming radiation’ condition. In (A.1.7) of Appendix 1, we mention that thehomogeneous solution is given by the Kirchoff formula which in this context is written as
hαβH (ct, x) =1
4π
∮∂L(ct,x)
[∂
∂r(rhαβH (ct′, x)) +
∂
∂(ct′)(rhαβH (ct′, x))
]dΩ. (2.2.11)
Imposing the condition
limr→∞
[∂
∂r(rhαβH (ct′, x)) +
∂
∂(ct′)(rhαβH (ct′, x))
]= 0, (2.2.12)
8

Chapter 2 2.2. SOLUTION METHOD
where this is at past null infinity where t + r/c =constant, means that as we expand thesurface of the light cone L, we encompass all space but the integrand will vanish causing thehomogeneous solution to vanish. The condition of (2.2.12) is a statement that the systemis unperturbed and cut off from contributions from the ‘outside.’ Another approach (givenin pg. 23 of Futamese [7]) is to consider random initial data for the field that is of 1 PNorder. It is found that effects due to the presence of the homogeneous solution do notarise until the 2.5 PN order. While it has not been demonstrated, it is assumed that ifone specifies initial data to a sufficiently high order, then the homogeneous solution willbe irrelevant to the dynamics of the system for orders close to that of the initial data. Forthese two reasons we can thus neglect the homogeneous solution.
We would now like to consider rewriting (2.2.10) to include our post-Newtonian pa-rameter ε. We could simply replace a t with a τ/ε however there is an alternative whichmakes it easier to calculate with. If we consider the inhomogeneous wave equation, whichis our main equation to solve, then making the transformation τ = εt gives
− ∂2cτ h(cτ, x) +
1
ε24h(cτ, x) =
1
ε2[−4πf(cτ, x)], (2.2.13)
where f is some arbitrary smooth source. We now consider a spatial transformationy = εx3, and we will write functions of the coordinates (cτ, y) with a tilde for example, fand functions of the coordinates (cτ, x) with a hat as usual. The relation between these is
k(cτ, y) = k(cτ, y/ε) = k(cτ, x), (2.2.14)
where k is some arbitrary function. In the coordinates (cτ, y), (2.2.13) becomes
− ∂2cτ h+4yh = 1/ε2(−4πf), (2.2.15)
which admits a retarded integral solution
h(cτ, y) =1
ε2
∫L(cτ,y)
f(cτ − |y − y′|,y′)|y − y′|
d3y′.
The integration domain here is L(cτ, y) = 0 ≤ |y − y′| ≤ cτ which is a ball centred aty with radius cτ . In order to convert back into the coordinates (cτ, x), we write
1
ε2
∫L(cτ,y)
f(cτ − |y − y′|,y′)|y − y′|
d3y′ =1
ε2
∫0≤ε|y/ε−y′/ε|≤cτ
f(cτ − ε|y/ε− y′/ε|,y′/ε)ε|y/ε− y′/ε|
ε3d3y′
ε3
and notice that h(cτ, y) = h(cτ, y/ε) along with using y′/ε = x′ to obtain
h(cτ, y/ε) =
∫0≤|y/ε−x′|≤cτ/ε
f(cτ − ε|y/ε− x′|,x′)|y/ε− x′|
d3x′.
The final step is to recall our original definition y/ε = x, so we arrive at
h(cτ, x) =
∫0≤|x−x′|≤cτ/ε
f(cτ − ε|x− x′|,x′)|x− x′|
d3x′. (2.2.16)
Using this, we have a formal solution for (2.1.5) given by
hαβ(cτ, x) =4G
c4
∫L(cτ/ε,x)
Λαβ(cτ − ε|x− x′|,x′)|x− x′|
d3x′. (2.2.17)
3The transformation y = εx is implied to mean yi = εxi where each spatial coordinate is transformed.For brevity, we omit these indices with understanding that x is to imply x1, x2, x3.
9

Chapter 2 2.2. SOLUTION METHOD
where we explicitly have the integration region L(cτ/ε, y) = 0 ≤ |x− x′| ≤ cτ/ε whichis a ball centred at x with radius cτ/ε. The relaxed field equations are so called becausethis solution does not require knowledge of the motion of the source.
However there is a glaring issue with this: Λαβ is itself dependent on hαβ, so this is nosolution at all. In the post-Newtonian regime of non-relativistic motion and weak fields(||hαβ|| 1) we can instead proceed by an iterative method for determining the potentialsby writing
hαβ =
∞∑n=0
εnhαβ(n)(ε) = hαβ(0)(ε) + εhαβ(1)(ε) + ε2hαβ(2)(ε) +O(ε3). (2.2.18)
This is a post-Newtonian expansion since our expansion parameter is ε = vT /c, which isassumed to be small. Each of the expansion terms are also functions of ε since we obtainthese terms in another series expansion manner in powers of ε which arises from scalingof the energy-momentum tensor Tαβ. However we can simplify this by noting that if wesubstitute each of these separately into the reduced field equations (2.1.5) and take noteof how the energy- momentum tensor scales with ε as in (2.2.7)-(2.2.9), then we see thatthe only way we can hope to have solutions that scale properly (as in either side of thereduced EFE match) is if
h00(0) = h00
(1) = 0, h0a(0) = h0a
(1) = h0a(2) = 0, hab(0) = hab(1) = hab(2) = hab(3) = 0. (2.2.19)
There is one more argument we can make which will remove further terms from theexpansions in (2.2.18). In the low order post-Newtonian expansions, the effect of theemitted gravitational radiation (more on this in Chapter 4) on the fields themselves canbe neglected. This back-radiation reaction begins to appear only at the 2.5PN order,which is much greater than the simple 1PN order at maximum we will be examining tocome. Therefore in our system we have a time-reversal symmetry. If we consider the spacetime squared interval
ds2 = gαβdxαdxβ = g00d(cτ)2 + 2g0ad(cτ)dxa + gabdx
adxb (2.2.20)
and note that schematically, the metric epxands like
g00 = −1 + (terms of h00) = −1 +O(ε2), (2.2.21)
g0a = (terms of h0a) = O(ε3), (2.2.22)
g0a = δab + (terms of h00) = δab +O(ε2), (2.2.23)
then when make the transformation τ → −τ , which forces velocities to transform asv → −v, we find the interval reads as
ds2−τ = g00d(cτ)2 − 2g0ad(cτ)dxa + gabdx
adxb. (2.2.24)
For the interval to be invariant, me must have the same expansion. The time reversalcan also be achieved by transforming ε → −ε as suggested by −τ = ε(−t) = (−ε)t. Wecan then consider the metric components as an expansion in powers of ε. The invarianceimplies that ds2
τ = ds2−τ , so that g00 and gab must be even functions of ε and g0a must be
odd. Therefore g00 and gab contain only even powers of ε and g0a has only odd powers of
10

Chapter 2 2.2. SOLUTION METHOD
ε. In summary, our expansions for the potentials of (2.2.18) are now
h00 =∞∑n=1
ε2nh00(n)(ε) = ε2h00
(2) + ε4h00(4) +O(ε6), (2.2.25)
h0a =
∞∑n=1
ε2n+1h0a(n)(ε) = ε3h0a
(3) + ε5h0a(5) +O(ε7), (2.2.26)
hab =
∞∑n=2
ε2nhab(n)(ε) = ε4hab(4) + ε6hab(6) +O(ε8), (2.2.27)
where we have attempted to space the expansions out to make it clear the comparativesizes of these terms. As we have alluded to, we also treat the energy-momentum tensor asan expansion in ε, that is
Tαβ =
∞∑n=2
εnTαβ(n)(ε) (2.2.28)
and in a similar manner the components are
T 00 =∞∑n=1
ε2nT 00(n)(ε) = ε2T 00
(2) + ε4T 00(4) +O(ε6), (2.2.29)
T 0a =
∞∑n=1
ε2n+1T 0a(n)(ε) = ε3T 00
(3) + ε5T 00(5) +O(ε7), (2.2.30)
T ab =∞∑n=2
ε2nT ab(n)(ε) = ε4T ab(4) + ε6T ab(6) +O(ε8). (2.2.31)
Now we are ready to see how these expansions fit together with the reduced field equationsand the gauge condition of (2.1.4). To obtain analogues of the reduced field equations,we simply substitute (2.2.18) and (2.2.28) into their respective sides and make use of thedistributivity of the d’Alembertian. We find
hαβ =∞∑n=2
εnhαβ(n) = −16πG
c4
∞∑n=2
εn(−g)Tαβ(n) + (−g)[tαβLL(hαβ) + tαβH (hαβ)
].
(2.2.32)We have emphasised here that the metric determinant, the Landau-Lifshitz and Harmonicpseudo-tensors are functions of the potentials and are to be expanded to the correct orderin those potentials. The goal here is to equate like powers of ε either side and thus obtainequations which give the potentials to progressively higher orders.
At the 1PN level, we need to determine the expansions for the components of thepotentials up to the terms O(ε4) for h00, O(ε4) for h0a and O(ε4) for hab. This requiresh00
(2), h0a(1), h
0a(2) which are then used to find h00
(4), h0a(3), h
0a(4). This involves expanding
gαβ,tαβLL and tαβH to the required order. We begin with expansions for the metric and itsdeterminant to this required order which are
gαβ = ηαβ + hαβ − 1
2hηαβ, (2.2.33)
(−g) = 1− h, (2.2.34)√−g(1) = 1− 1
2h, (2.2.35)
where indices are lowered with the Minkowski metric, i.e. hµν = ηµαηβν hαβ and h :=
ηµν hµν .
11

Chapter 2 2.2. SOLUTION METHOD
For tαβLL and tαβH expansions, we first make note of the leading order scaling of thepotentials which are:
h00 = O(ε2), h0a = O(ε3), hab = O(ε4). (2.2.36)
We note also that spatial derivatives of these potentials will not alter the scalings buttime derivatives will contribute an extra factor of ε. We will show how the expansions arefound for t00
LL and t00H and provide the other components. At this order, all we require of
the metric gαβ are the scalings given by (2.2.21)-(2.2.23). By inspection of (2.1.7) and
(2.1.8), we can see that at O(ε2) (which is for h00(2)), t
00LL = 0 = t00
H . This is purely dueto the quadratic nature of the potentials in these expressions. The minimum order wecan obtain for a quadratic term, that is a general expression of the form ∂λh
ρσ∂µhντ , is
of O(ε4) corresponding to a term like ∂ah00∂bh
00. Indeed, we can therefore simply guessthat the expression for (−g)t00
LL accurate to O(ε4) is C∂ch00∂ch00 where C is a constant.
An explicit calculation using (2.1.7), reveals that at the required order,
16πG
c4(−g)t00
LL = −7
8∂ch
00∂ch00 +O(ε6). (2.2.37)
We can then substitute (2.2.25) into this and neglecting all terms of order ε6 and higher,we find
16πG
c4(−g1)t00
LL = −7
8∂ch
00(2)∂
ch00(2)ε
4 +O(ε6). (2.2.38)
For the Harmonic pseudo-tensor, we have
16πG
c4(−g1)t00
H = O(ε6) (2.2.39)
and it can therefore be ignored. The one subscript on the determinant of the metric termis to indicate that this is to be expanded accurate to the first order potentials which areh00
(2), h0a(1), h
ab(2). That is, (−g0) = −det(ηαβ) = 1 and (−g1) = 1 + h00
(2). So upon looking
at the h00 component of (2.2.32), we have
ε2h00(2)+ε
4h00(4) = ε2
[−16πG
c4(−g0)T 00
(2)
]+ε4
[−16πG
c4(−g1)T 00
(4) +7
8∂ch
00(2)∂
ch00(2)
]+O(ε6).
(2.2.40)Equating powers of ε will gives us our first and second order equations respectively,
h00(2) = −16πG
c4(−g0)T 00
(2), (2.2.41)
h00(4) = −16πG
c4(−g1)T 00
(4) +7
8∂ch
00(2)∂
ch00(2). (2.2.42)
For the other components of the potential we find expansions accurate to their leadingorders. For the first order potentials the pairs t0aLL, tabLL and t0aH , tabH both vanish. Atthe next order, we very carefully keep track of orders of ε and substituting in (2.2.26) and(2.2.27), we eventually find
16πG
c4(−g1)t0aLL =
[3
4∂ah00
(2)∂0h00(2) + (∂ah0c
(3) − ∂ch0a
(3))∂ch00(2)
]ε5 +O(ε7),
16πG
c4(−g1)tabLL =
[1
4∂ah00
(2)∂bh00
(2) −1
8δab∂ch
00(2)∂
ch00(2)
]ε4 +O(ε6),
16πG
c4(−g1)t0aH = O(ε7),
16πG
c4(−g1)tabH = O(ε6).
12

Chapter 2 2.3. ZONES OF INTEGRATION
The relevant versions of (2.2.32) for these components are
ε3h0a(3) + ε5h0a
(5) +O(ε7) = ε3[−16πG
c4(−g1)T 0a
(3)
]+
ε5[−16πG
c4(−g2)T 0a
(5) +3
4∂ah00
(2)∂0h00(2) + (∂ah0c
(3) − ∂ch0a
(3))∂ch00(2)
](2.2.43)
and
ε4hab(4) + ε6hab(6) = ε4[−16πG
c4(−g1)T ab(4) +
1
4∂ah00
(2)∂bh00
(2) −1
8δab∂ch
00(2)∂
ch00(2)
]+O(ε6).
(2.2.44)For the 1PN order we only require h0a
(3) and hab(4) and we can easily read off these equationsas
h0a(3) = −16πG
c4(−g1)T 0a
(3), (2.2.45)
hab(4) = −16πG
c4(−g1)T ab(4) +
1
4∂ah00
(2)∂bh00
(2) −1
8δab∂ch
00(2)∂
ch00(2). (2.2.46)
Equations (2.2.41), (2.2.42), (2.2.45) and (2.2.46) will form the basis for Section 2.5.As it stands, the components in (2.2.18) will not solve the reduced field equations
alone. We must find a way to include the gauge condition which we recall is
∂βhαβ = 0.
Fortunately this is simple for if we take the partial derivative of both sides of (2.2.18),then
0 = ∂βhαβ =
∞∑n=0
εn∂βhαβ(n). (2.2.47)
Therefore we find∂βh
αβ(n) = 0, (2.2.48)
which says that each iteration must also satisfy this gauge condition.
2.3 Zones of Integration
In the DIRE approach, one partitions the past light cone domain L(cτ/ε, x) of integrationof (2.2.17) into two disjoint sets, a near and a wave zone. The boundary of these regionsis set to be a two-sphere of radius R. This radius represents a characteristic scale forthe system which is to be understood as the length of one characteristic gravitationalwavelength. The entire source is to be contained deep within the near zone which is tosay that it is within the world tube T (S) and hence within the larger world tube T (R) :=xα; |x′| =: r′ < R, −∞ < τ < ∞. Until the post-Newtonian approximation beginsto break down; which could occur for instance in the in-spiral phase of two gravitatingobjects, we assume that S R. In this region, retardation effects are assumed to besmall and in fact this may be taken instead as the definition of the interface between thenear and wave zones.
We define the near zone of the field point (cτ, x), namelyNε(cτ, x), as the intersection ofthe spatial region Lε(cτ, x) := 0 ≤ |x− x′| ≤ cτ/ε with the spatial region r′ := |x′| < R.That is, the intersection of the world tube T (R) containing the source and the projection ofthe past light cone at (cτ, x) at the time slice cτ = 0. The wave zone, Wε(cτ, x), is definedas the relative complement of Nε(cτ, x) in Lε(cτ, x), i.e. Wε(cτ, x) := Lε(cτ, x) \Nε(cτ, x).In simpler terms, the wave zone is the spatial region remaining after we remove the near
13

Chapter 2 2.3. ZONES OF INTEGRATION
(a) Wave zone field point (b) Near zone field point
Figure 2.1: Past, solid light cones of the field point (cτ,x) depicting the regions of interest:the matter distribution which is contained within the world tube T (S); the world tubeT (R) whose projection of the intersection with the light cone Lε(cτ, x) onto the surfaceτ = 0, yields the near zone Nε(cτ, x). The rest of the projection of the light cone after thenear zone intersection is removed is the wave zone Wε(cτ, x).
zone region. We refer the reader to Figure 2.1 for a space-time diagram depiction of theseregions.
By definition, the near and wave zone sets are disjoint so that Lε(cτ, x) = Nε(cτ, x) ∩Wε(cτ, x). Our solutions to (2.1.5) can then be written as
hαβ(cτ, x) =4G
c4
∫Lε(cτ,x)
Λαβ(cτ − ε|x− x′|,x′)|x− x′|
d3x′ (2.3.1)
=4G
c4
[∫Nε(cτ,x)
Λαβ(cτ − ε|x− x′|,x′)|x− x′|
d3x′ +
∫Wε(cτ,x)
Λαβ(cτ − ε|x− x′|,x′)|x− x′|
d3x′
](2.3.2)
= hαβNε(cτ, x) + hαβWε(cτ, x). (2.3.3)
where we have defined
hαβNε :=4G
c4
∫Nε(cτ,x)
Λαβ(cτ − ε|x− x′|,x′)|x− x′|
d3x′, (2.3.4)
hαβWε:=
4G
c4
∫Wε(cτ,x)
Λαβ(cτ − ε|x− x′|,x′)|x− x′|
d3x′. (2.3.5)
So for a chosen field point we have two contributions to the potential hαβ; one from thenear zone and one from the wave zone. Each of these will individually depend on R butthe sum should not depend on the arbitrary choice of R. This is because it is expectedthat the wave zone contribution will contain terms dependent on R, but that all theseterms will be exactly cancelled by the near zone contribution and the remaining terms willbe finite. This result was proved by Pati and Will [11].
In summary, we have two choices of the field point position; it can be in the nearzone or the wave zone as is depicted in Figure 2.1. For the field point x ∈ Nε(cτ, x), thepotential reads as
hαβ(x ∈ Nε) = hαβNε(x ∈ Nε) + hαβWε(x ∈ Nε). (2.3.6)
14

Chapter 2 2.4. MULTI-POLE EXPANSIONS
We can refer to each term on the right hand side of (2.3.6) as the near zone contributionto a near zone field point, which we label schematically as N → N , and the wave zonecontribution to a near zone field point W → N . Of course, these are still dependenton the choice of the field point (cτ, x) and on ε; we use these purely to aid conceptualunderstanding. The expressions for these contributions are explicitly given by (2.3.4) and(2.3.5) respectively. Similarly for x ∈ Wε(cτ, x), the potentials split into
hαβ(x ∈ Wε) = hαβNε(x ∈ Wε) + hαβWε(x ∈ Wε). (2.3.7)
and we label these as the near zone contribution to a wave zone field point (N →W) andthe wave zone contribution to a wave zone field point (W →W). The explicit expressionsare given by (2.3.4) and (2.3.5) respectively for each contribution.
2.4 Multi-pole Expansions
In this section we examine specific cases for the position of the field point and of these,only one contribution each. These will be the near zone contribution to a wave zone fieldpoint, N → W, and the near zone contribution to a near zone field point, N → N . Forour purposes, the N → W and W → W contributions will only briefly be considered inSection 2.5.
Let us first consider the field point to be in the wave zone, that is x ∈ Wε(cτ, x). Weknow from (2.3.7), that we have two contributions for the potential. We will examine onlythe near zone contribution here. We define
Λαβ(cτ − ε|x− x′|,y)
|x− x′|=: f(ε(x− x′)),
where the spatial dependence of Λ has been replaced with an arbitrary vector y. If we fixτ and y, we can define a function f which has argument only of (x− x′). On top of this,we may also hold x fixed since this is just an arbitrary point lying in the wave zone whichwe have chosen. Doing this we can then consider a function g with argument only of thesource points x′. This chain of logic is summarised by
Λαβ(cτ − ε|x− x′|,y)
|x− x′|=: f(ε(x− x′)) =: g(εx′). (2.4.1)
Now since εx′ lies in the near zone, we can treat it as a ‘small’ vector and write a Taylorexpansion about x′ = 0 (we ignore the question of whether g is infinitely differentiable).Then
g(εx′) = g(0) + εx′a∂g
∂x′a+ ε2
1
2x′ax′b
∂2g
∂x′a∂x′b+ · · · , (2.4.2)
with the derivatives evaluated at x′ = 0. Since f is dependent on x′ through (x − x′),then
∂g
∂x′a=
∂f
∂x′a= − ∂f
∂xa, (2.4.3)
where primes indicate the coordinates of x′ and unprimed quantities that of x. Critically,since the derivatives are with respect to xa rather than x′a, then we can set x′ = 0 beforetaking the derivatives. We then write f(x−x′) = f(x), |x| := r and hence (2.4.2) becomes
g(x′) =∞∑q=0
(−ε)q
q!x′Qq∂Qq (f(x)) =
∞∑q=0
(−ε)q
q!x′Qq∂Qq
(Λαβ(cτ − εr,y)
r
). (2.4.4)
15

Chapter 2 2.4. MULTI-POLE EXPANSIONS
Note the multi-index notation, where a sum over a repeated multi-index is to be understoodas a sum over each index contained in the multi-index. For example, if q = 2, then theterm becomes (ε2/2)x′ax′b∂ab[Λ
αβ(cτ − εr,y)/r]. With y = x′, then 2.3.4 is now
hαβNε =4G
c4
∞∑q=0
(−ε)q
q!∂Qq
[1
rMαβ,Qq
], (2.4.5)
where the multi-pole moments are
Mαβ,Qq :=
∫Nε
Λαβ(cτ − εr,x′)x′Qqd3x′. (2.4.6)
For gravitational wave detection, we will be interested in when the field point is in thefar away wave zone where terms of O(r−2) and higher are dominated by those of orderO(r−1). Using the product rule, we can split the derivative in (2.4.5) into two parts, oneacting on r−1 and the other able to be pulled into the integrand and differentiating Λαβ.From (A.2.5) (at this point we recommend reading appendix A.2 for background of thecoming notation), ∂Qqr
−1 = O(r−2) and this term can be ignored. For the second term,
we realize that Λαβ is dependent on the coordinates of the field point xa through theretarded coordinate u = cτ − εr. Therefore by the product rule,
∂Λαβ
∂xa= ∂aΛ
αβ = −∂Λαβ
∂u∂ar = −ε∂Λαβ
∂uΩa,
∂abΛαβ = ε2
∂2Λαβ
∂u2ΩaΩb +O(r−1),
∂Qq Λαβ = (−ε)q ∂
qΛαβ
∂uqΩQq +O(r−1), (2.4.7)
where (A.2.3) has been used and where (2.4.7) follows by induction on q, the number ofindices contained in the multi index Q. We then substitute (2.4.7) into (2.4.5) and notethat the summation can be split with the derivatives terms of (2.4.5) in one sum and theO(r−1) terms in the other. However, the factor of 1/r outside the summation then makesthis second sum become O(r−2), which we ignore. Finally, for a far away wave zone fieldpoint, the near zone contribution to the potential is
hαβNε =4G
c4r
∞∑q=0
ΩQq
q!ε2q(∂
∂u
)q ∫Nε
Λαβ(u,x′)x′Qqd3x′. (2.4.8)
This is a multi-pole expansion. Recalling the definition of Λαβ from (2.1.6), we see thatwe can split this integral into two pieces: one composed of the energy-momentum tensorTαβ and another of the Landau-Lifshitz and harmonic pseudo-tensors. In this way, we canloosely consider the Tαβ term as a matter multi-pole expansion which gives rise to someof the potential h. The other expression describes how the potentials affect themselves.This is a consequence of the non-linearity present in General Relativity and is the inherentsource of much of its difficulties.
If the field point x ∈ Nε(cτ, x), then since the source is also contained in the near zonethen ε|x − x′| can be treated as a small quantity and we may write a Taylor expansionabout ε|x− x′| = 0,
Λαβ(cτ − ε|x− x′|) = Λαβ(cτ)− ε|x− x′| ∂cτ Λαβ +1
2ε2|x− x′|2∂2
cτ Λαβ − · · · , (2.4.9)
where the derivatives are evaluated at cτ . This can be inserted into (2.3.4) to yield
hαβNε =4G
c4
∞∑q=0
(−ε)q
q!
(∂
∂(cτ)
)q ∫Nε
Λαβ(cτ,x′)|x− x′|q−1d3x′. (2.4.10)
16

Chapter 2 2.5. THE FIRST POST-NEWTONIAN POTENTIALS
The domain of integration is the same as in (2.4.5). On the whole, the key equations forthis section are the pair, (2.4.5, 2.4.6), describing a near zone expansion for a wave zonefield point, (2.4.8) which is a far-away wave zone expansion where we only seek terms ofO(r−1) and (2.4.10), a near zone expansion for a near zone field point. These will proveuseful in the coming section.
2.5 The first post-Newtonian potentials
The Newtonian order
As the title suggests, in this section we will integrate the first post-Newtonian equationsfor the potentials in the case of a system of N point-particles. This firstly requires thesolution to the ‘Newtonian’ order which are given by the equations
h00(2) = −16πG
c4(−g0)T 00
(2), (2.5.1)
h0a(3) = O(ε3), (2.5.2)
hab(4) = O(ε4). (2.5.3)
At this order, the metric we use for the right hand side is the Minkwoski metric sincewe are using hαβ(0) = 0 here. Therefore (−g1) = −det(ηαβ) = 1 and T 00
(2) is now a function
of the Minkowski metric which we can write as T 00(2)[η]. As described in Section 2.2, we
require that Tαβ(0) ∈ C∞(R3) so that we may utilize the key equations of Section 2.4,
namely (2.4.5) and (2.4.10). We also assume that the matter distribution is bounded and
is entirely contained within the near zone so that we have the nice simplification hαβWε= 0
and hence hαβ = hαβNε + hαβWε= hαβNε .
We now define the field variables Φ, Aa and the matter variables ρ, ja such that
h00(2) :=
4
c2Φ, h0a
(3) :=4
c3Aa, (2.5.4)
T 00(2) := c2ε2ρ, T 0a
(3) := cε3ja, (2.5.5)
and with these definitions, we have the wave equation
Φ = −4πGε2ρ. (2.5.6)
The gauge condition ∂βhαβ = 0, is now a consequence of the conservation equations
∂βTαβ = 0. From these we can find two continuity equations which are
∂τ ρ+ ∂aja = 0, ∂τ Φ + ∂aA
a = 0. (2.5.7)
The wave equation of (2.5.6) admits a retarded integral solution
Φ(cτ,x) = ε2G
∫ρ(cτ − ε|x− x′|,x′)
|x− x′|d3x′. (2.5.8)
The task now is to evaluate this expression depending on the position of the field point.We begin by considering the field point in the near zone; x ∈ Nε(cτ, x)). Here we can
use (2.4.10) and consider the first few terms. For the potential Φ these are
Φ = Gε2∫ρ(cτ, x′)
|x− x′|d3x′− Gε3
c
∂
∂τ
∫ρ(cτ, x′)d3x′+
Gε4
2c2
∂2
∂τ2
∫ρ(cτ, x′)|x− x′|d3x′+ · · ·
(2.5.9)
17

Chapter 2 2.5. THE FIRST POST-NEWTONIAN POTENTIALS
This is good so far but we can do slightly better. If we integrate both sides of the continuityequation for ρ as in the left of (2.5.7) and using Gauss’ theorem for the spatial derivativeterm we find ∫
∂τ ρd3x = −
∫∂aj
ad3x = −∮jadSa = 0,
because there is no flux of matter across the surface bounding the matter (we assumed thematter was bounded). We can then move the time derivative outside the integral becausewe know that ρ is a smooth function over the matter distribution. This is a common trickwith continuity equations. So if we make the following definitions
U := G
∫ρ(cτ, x′)
|x− x′|d3x′, (2.5.10)
X := G
∫ρ(cτ, x′)|x− x′|d3x′, (2.5.11)
then (2.5.9) reads
Φ = ε2
[U +
ε2
2c2
∂2X
∂τ2+O(ε3)
]. (2.5.12)
It is a rather comforting verification that a post-Newtonian method does indeed re-derivethe Newtonian terms, for instance (2.5.10) is the Newtonian potential which satisfies thePoisson equation 4U = −4πGρ. The next order contribution (2.5.11) satisfies 4X = 2Uand is called a super-potential since it is sourced by a potential. The near zone metric isnow
h00(2) =
4ε2
c2U +
2ε4
c4
∂2X
∂τ2+O(ε5), x ∈ Nε(cτ, x). (2.5.13)
At this order, the metric becomes
g00 = −(
1 +2
c2Φ
), (2.5.14)
g0a = 0, (2.5.15)
gab = δab
(1− 2
c2Φ
), (2.5.16)
which is exactly that found if one considers the Newtonian limit in General relativity fromthe field equations.
To completely determine the potentials to first order, we now consider the case wherethe field point is in the wave zone; x ∈ Wε(cτ, x). For this we make use of (2.4.5). Wecan therefore expand the scalar field Φ as
Φ = Gε2[
1
r
∫ρd3x′ − ε∂a
(1
r
∫ρx′ad3x′
)+ε2
2∂ab
(1
r
∫ρx′ax′bd3x′
)− ε3
6∂abc
(1
r
∫ρx′ax′bx′cd3x′
)+ · · ·
]. (2.5.17)
To simplify this notation we introduce a general mass multi-pole moment defined by
Iq1q2...qn :=
∫ρx′Qqd3x′, (2.5.18)
where Qq is a multi-index. It can be shown by taking derivatives with respect to u andusing surface integral arguments that Ia = 0 in the center of mass frame. Therefore thescalar field becomes
Φ = ε2GI
r+ ε3
G
2∂ab
(Iab
r
)− ε4G
6∂abc
(Iabc
r
)+ . . . . (2.5.19)
18

Chapter 2 2.5. THE FIRST POST-NEWTONIAN POTENTIALS
It is interesting to note that again the leading order term is the ordinary Newtonianpotential since I = M , where M is the total mass-energy of the system. The higherorder moments are functions of the retarded time τr := τ − εr/c, so the post-Newtoniancorrections contain all the retardation effects. The wave-zone potential is now
h00(2) =
4Gε2
c2
[M
r+ε
2∂ab
(Iab
r
)− ε2
6∂abc
(Iabc
r
)+O(ε3)
], x ∈ Wε(cτ, x). (2.5.20)
The 1PN potentials
It is now time to consider the 1PN equations for the potentials. In Section 2.2, we foundthat these were governed by the wave equations
h00(4) = −16πG
c4(−g1)T 00
(4) +7
8∂ch
00(2)∂
ch00(2), (2.5.21)
h0a(3) = −16πG
c4(−g1)T 0a
(3), (2.5.22)
hab(4) = −16πG
c4(−g1)T ab(4) +
1
4∂ah00
(2)∂bh00
(2) −1
8δab∂ch
00(2)∂
ch00(2). (2.5.23)
In these equations we recall that (−g1) = 1 + h00(2) = 1 + (4/c2)Φ and that T 00
(4), T0a(3)
and T ab(4) are functions of the ‘Newtonian’ metric given by (2.5.14)-(2.5.16). Substituting
h00(2) = (4/c2)Φ we have
h00(4) = −16πG
c4(−g1)T 00
(4) +14
c4∂cΦ∂
cΦ, (2.5.24)
h0a(3) = −16πG
c4(−g1)T 0a
(3), (2.5.25)
hab(4) = −16πG
c4(−g1)T ab(4) −
4
c4
(∂aΦ∂bΦ− 1
8δab∂cΦ∂
cΦ
). (2.5.26)
To continue further, we define new functions V , V a, W ab and W := δabWab by
h00(4) =
4
c2V − 4
c4W +
8
c4Φ2, (2.5.27)
h0a(3) =
4
c3V a, (2.5.28)
hab(4) =4
c4W ab. (2.5.29)
The goal with these definitions is to reduce (2.5.24)-(2.5.26) into wave equations for whichsome will have purely matter sources and others both matter and field sources. Inserting(2.5.29) into (2.5.26) yields a wave equation for the tensor potential
W ab = −4πG(−g1)T ab(4) − ∂aΦ∂bΦ +
1
2δab∂cΦ∂
cΦ. (2.5.30)
We can take the trace of this equation to find the wave equation for W ,
W = −4πGδab(−g1)T ab(4) +1
2∂cΦ∂
cΦ +O(ε2), (2.5.31)
where we have used δabδab = 3. We can also trivially insert (2.5.28) into (2.5.25) to obtain
the wave equation satisfied by the vector potential V a, that is
V a = −4πG
c(−g1)T 0a
(3). (2.5.32)
19

Chapter 2 2.5. THE FIRST POST-NEWTONIAN POTENTIALS
In anticipation of inserting (2.5.27) into (2.5.24), we would have a Φ2 term which we willnow evaluate. Noting that Φ2 = 2ΦΦ + 2∂cΦ∂
cΦ − 2(∂0Φ)2 and using the first orderexpression for Φ which is Φ = −4πG
c2T 00
(2) then
Φ2 = −8πG
c2ΦT 00
(2) + 2∂cΦ∂cΦ +O(ε6). (2.5.33)
Note that we have neglected the term (∂0Φ)2 which is of order O(ε6). Inserting (2.5.27)into (2.5.24) and making use of the wave equations for W and Φ2 we find
V = −4πG
c2(−g1)δαβT
αβ(4) +
16πG
c4ΦT 00
(2) +O(ε2), (2.5.34)
which completes our set of wave equations. Integrating each of these to an appropriateorder will then yield the second order expansion. We could write down for each of thesewave equations a retarded integral solution, however to evaluate these we would need tosplit the integration region into near and wave zones since there are now field sources Φwhich range over all space.
While we will not be integrating explicitly the general forms for these new potentials,it is worth examining just the leading order term in an expansion for W ab for a wave zonefield point. This term will lead us to the beloved quadrupole formula in chapter 4. Tobegin we define from (2.5.30)
W ab = −4πGχab, (2.5.35)
χab := (−g1)T ab(4) +1
4πG
(∂aΦ∂bΦ− 1
2δab∂cΦ∂
cΦ
), (2.5.36)
and we will utilise the identity [12]
χab =1
2∂00(χ00xaxb) +
1
2∂c(χ
acxb + χbcxa − ∂dχcdxaxb), (2.5.37)
where χ00 = c2ε2ρ+O(ε4). The solution to (2.5.35) is a retarded integral and we choosethe field point x ∈ Wε(cτ, x). The source term for (2.5.35) contains field terms Φ whichrange over all space, so the wave zone contribution to W ab must be taken into account.So W ab = W ab
Nε + W abWε
; however the the leading term in the wave zone contribution is of
order 0.5PN relative to the quadrupole term of W abNε so we will ignore W ab
Wεanyway. For
higher order terms, one should not ignore this contribution and we discuss this in Section4.6. The expansion of W ab
Nε with a wave zone field point, using (2.4.5), is
W ab = G
[1
r
∫Nεχabd3x′ − ε∂c
(1
r
∫Nεχabx′cd3x′
)+ · · ·
]. (2.5.38)
For the leading term, we use (2.5.37) and the Divergence theorem, to find∫Nεχabd3x′ =
ε4
2
∂2
∂τ2r
∫Nερ xaxb d3x′ +
1
2
∮∂Nε
(χacxb + χbcxa − ∂dχcdxaxb) dSc, (2.5.39)
where the region of integration for the surface integral is the boundary of the near andwave zones which is set at r′ := |x′| = R with R the radius of the two-sphere which formsthis boundary (recall Section 2.3). The first term is the quadrupole term
ε4
2
∂2Iab
∂τ2r
, (2.5.40)
where the derivative is with respect to τr := τ−εr/c. The utility of converting to a surfaceintegral is that at the boundary, T ab(4) vanishes since we assumed the matter was contained
20

Chapter 2 2.5. THE FIRST POST-NEWTONIAN POTENTIALS
deep within the near zone in a two-sphere of radius S R. We then only need to worryabout the field terms Φ at the boundary.
The surface integral term is a little more interesting as we have not come across thisyet, although we do have the machinery required to handle it. Our field point is in thewave zone so we must use the expression for Φ which is also in the wave zone. We foundthis is in (2.5.17) and to the order we require, it is
Φ = ε2GM
r+O(ε4). (2.5.41)
Therefore χab becomes
χab = ε4GM
4πr4
(ΩaΩb − δab/2
)+O(ε6), (2.5.42)
where we have used Eqs. (A.2.2) and (A.2.5). The surface integrals can now be evaluatedusing dSc = R2ΩcdΩ and xa = RΩa on the surface. We will only evaluate the onecontaining ∂dχ
cdxaxb and this is done in Appendix A.3. The core idea of this morecomplicated version can be easily transferred across to the other two integrals and integralsfor higher order terms. These integrals are either zero because they contain products of anodd number of the angular vectors Ωa or they are only dependent on the arbitrary radiusR. In the latter case, these terms will be exactly cancelled by corresponding terms fromthe wave zone contribution W ab
W (recall the discussion in Section 2.3). After all of this wefind,
hab(4) =4Gε4
c4
Iab(2)
2r+O(ε6), (2.5.43)
which is our quadrupole term.
Near-zone 1PN potentials for an N -body system
We can specialise to a particular situation where the source of the field is generatedby a system of N -point particles each having their own mass mA where A is used tolabel a particle, at positions zA. We assume that this system obeys the ‘slow motion’approximation and that its entire evolution is contained deep within the near zone. Forinstance, a model of the solar system. Based on previous discussions, we could immediatelytake issue with this use of point particles. Using this approximation, we can expect tohave divergences appearing typically due to the infinite self field of each particle. Theseare a result of evaluating the Newtonian potentials at the position of the particle exactlywhere the potentials diverge. We know that any energy in space-time will generate its owngravitational field (from 2.1.1) which will then contribute to the inter-body field. Anotherpossibly clearer issue, is that we have assumed throughout that Tαβ ∈ C∞ and yet we seekto use Dirac delta distributions. We must therefore be quite careful of how the equationsare handled.
To avert these infinities, we must use the methods of regularization where we givemeaning to these offending terms which typically involves assuming they should vanish.There are many prescriptions for these regularizations and common approaches are usingmodified forms of a Hadamard partie finie as in the BDI approach or a dimensionalregularization used in effective field theories which are taken from quantum field theoriesand are quite powerful (see the work of Goldberg and Rothstein [13] for this in action).While these regularizations may seem unsatisfactory, the end results agree very well withexperiments and observations. In no way does this validate their use mathematically, butit does give one confidence that it is not too far-fetched.
21

Chapter 2 2.5. THE FIRST POST-NEWTONIAN POTENTIALS
For an N -body system of point particles we will need an expression for the energy-momentum tensor. Although we will not prove it here we state that it is given by
(−g1)Tαβ(4) = εα, β∑A
mAvαAv
βA
√−g1√
−gµν 1vµAv
νA/c
2δ(x− zA), (2.5.44)
where vA = d(ct,xA)dτ = (c/ε,vA) is the four-velocity of particle A and
εα, β =
ε2 : α = 0, β = 0ε3 : α = 0, β = bε4 : α = a, β = b.
For the metric terms that appear we make use of the expansions given in (2.2.33) and(2.2.35) and the potentials from earlier,
h00(2) =
4ε2
c2U +O(ε4), h0a
(1) = O(ε3), hab(2) = O(ε4). (2.5.45)
We also have that the density is ρ =∑
BmBδ(x−zB) and therefore we can easily evaluate(2.5.10) to obtain the ‘Newtonian’ potential for N -point masses
U =∑B
GmB
|x− zB|. (2.5.46)
The relevant metric terms appearing in the energy-momentum tensor can be expanded as√−gµν 1v
µAv
νA/c
2 = 1− ε2
2c2v2A −
ε2
c2U +O(ε4),√
−g1 = 1 +ε2
c2U +O(ε4)
and inserted into (2.5.44) to obtain
(−g1)Tαβ(4) = εα, β∑A
mAvαAv
βA
[1 +
ε2
2c2v2A +
3ε2
c2UA +O(ε4)
]δ(x− zA), (2.5.47)
where UA = U(τ, zA) is evaluated at the point of particle A. However there is a serious issuehere: the potential is infinite when we reach the summation index where we put zB = zAin (2.5.46). As a distribution (because of the presence of the Dirac delta), (2.5.47) isundefined. This is a first look at the need for regularization methods in post-Newtoniantheory. In this case, the method of Blanchet, Damour and Iyer (BDI) [14] proposes theregularization
δ(x− z)
|x− z|≡ 0, (2.5.48)
which removes the offending term in the summation and hence we instead insert
bUcA =∑B 6=A
GmB
|zA − zB|, (2.5.49)
in place of UA in (2.5.44). Our wave equations for the potentials V , V a, W and W ab are
22

Chapter 2 2.5. THE FIRST POST-NEWTONIAN POTENTIALS
now
V = −4πGε2∑A
mA
(1 +
3
2
ε2
c2v2A −
ε2
c2bUcA
)δ(x− zA) +O(ε6), (2.5.50)
V a = −4πGε3∑A
vaAδ(x− zA) +O(ε5), (2.5.51)
W = −4πGε4∑A
mAv2Aδ(x− zA) +
1
2∂cΦ∂
cΦ +O(ε6), (2.5.52)
W ab = −4πGε4∑A
mAvaAv
bAδ(x− zA)−
(∂aΦ∂bΦ− 1
2δab∂cΦ∂
cΦ
)+O(ε6). (2.5.53)
Here (2.5.34)-(2.5.53) are the starting points for determining the 1PN potentials of hαβ.We will not labour through all of the details here but we will give an overview of how onecould proceed from this point and what the results are.
As usual we can write the wave equations above in terms of a retarded integral solutionover the past light cone of the field point and then split this into a near zone contributionand a wave zone contribution. Next we choose where we place the field point x, eitherin the near or wave zone and then proceed to evaluate the integrals to determine thepotentials. To begin we consider x ∈ Nε(cτ, x). For V , we note that the source forits wave equation, (2.5.50), is entirely contained in the near zone; it is a matter source.Therefore its wave zone contribution vanishes (VWε = 0) and hence V = VNε . Keepingtrack of orders of ε we can essentially copy down the method for the evaluation of Φ inthe near zone from the previous section. We obtain
V = ε2U +ε4
c2ψ +
ε4
2c2
∂2X
∂τ2+O(ε5), (2.5.54)
where
U :=∑A
GmA
|x− zA|, ψ :=
∑A
GmA
(32 v
2A − bUcA
)|x− zA|
, X :=∑A
GmA|x− zA|. (2.5.55)
The wave equation for V a also contains only a matter term which implies that the wavezone contribution vanishes so
V a = ε3Ua +O(ε5), (2.5.56)
with
Ua =∑A
GmAvaA
|x− zA|. (2.5.57)
The computations for W ab are more difficult and involve realising that we can split it intotwo parts schematically as
W ab = W ab[M ] + W ab[F ], (2.5.58)
where W ab[M ] contains only matter contributions and W ab[F ] contains the field contribu-tions. We can then divide (2.5.53) into two pieces; one wave equation for each contribution.The matter contribution can be evaluated simply by the same argument as before thatW ab[M ]Wε = 0. However the field contribution will not vainsh in the wave zone since itis sourced by the potentials Φ which range over all space. For the wave zone contributionwe would have to use (2.5.19) rather than (2.5.12) but it turns out that this part onlycontributes at the 3PN order which is well beyond the 1PN order that we are considering
23

Chapter 2 2.6. ALTERNATE INTEGRATION METHODS
and so can be ignored. The final result is (noting that once we find W ab we can take thetrace and find W )
W ab = ε4P ab +O(ε5), (2.5.59)
W = ε4P +O(ε5), (2.5.60)
where we have the rather long definitions
P ab :=∑A
GmAvaAv
bA
|x− zA|+
1
4
∑A
G2m2A
|x− zA|2naAn
bA − 2
∑A
∑B>A
G2mAmB
S|zA − zA|nAABn
bAB
+ 2∑A
∑B>A
G2mAmB
S2
[(naA − naAB)(nbB − nbAB)− 1
2δab(nA − nAB).(nB + nAB)
],
(2.5.61)
and
P :=∑A
GmAv2A
|x− zA|+
1
4
∑A
G2m2A
|x− zA|2
− 1
2
∑A
∑B>A
G2mAmB
(1
|x− zA||zA − zB|+
1
|x− zB||zA − zB|− 1
|x− zB||x− zB|
).
(2.5.62)
The simplifying notation we have used here is
nA :=x− zA|x− zA|
, nAB :=zA − zB|zA − zB|
, S := |x− zA|+ |x− zB|+ |zA − zB|. (2.5.63)
Finally, for a near zone field point, the potentials are given by
h00(4) =
4ε2
c2U +
4ε4
c4
(ψ +
1
2
∂2X
∂τ2− P + 2U2
)+O(ε5), (2.5.64)
h0a(3) =
4ε3
c3Ua +O(ε5), (2.5.65)
hab(4) =4ε4
c4P ab +O(ε5). (2.5.66)
We will not be considering the potentials for a wave zone field point since we intend to usethese results to derive the equations of motion of the system. Therefore we should onlyneed to use the results for a near zone field point.
2.6 Alternate Integration Methods
There are also more subtle issues with (2.2.17) which are the cause of mathematical diver-gences. This arises because the potentials cannot and in general will not have any compactsupport since it is assumed that they exist over all space-time which includes points veryfar from the source. In the context of gravitational waves, detectors on Earth can beassumed to be in this far region and therefore the limiting extent of the potentials mustbe known for data analysis. There is then a chance that this retarded integral may divergeor be ill-defined. This typically occurs when Dirac-delta functions are used to model pointparticles as we have seen with the dramatic result that equations begin to diverge. Thisis clearly not consistent with observation and reality. To keep them in check, they are
24

Chapter 2 2.6. ALTERNATE INTEGRATION METHODS
‘regularized’ so that only finite quantities are obtained and the equations can be solved.These divergences have caused much difficulty in this field so many different approacheshave been formulated to tackle them. In this section we will briefly discuss these.
The method of Blanchet, Damour and Iyer (BDI) developed over many papers [14–17]computes directly the equations of motion for a system in harmonic coordinates using apost-Newtonian iteration, in many ways equivalent to the approach defined in Section 2.2.Their method begins by solving the reduced EFE at the first order in vacuum, exteriorto the compact source, by a multipole expansion. They then show that the solution herecan be written in terms of only two types of moments; a mass and a current momentwhich are (in their notation [8]) IL(u := t − r/c) and JL(u) where L is a multi-index.Due to a gauge transformation there are in fact four other moments labelled WL, XL, YLand ZL which have no physical meaning but omitting them leads to different and mostimportantly, incorrect results. The key is that there is no bijective map from the set ofmoments IL, JL,WL, XL, YL, ZL to IL, JL, 0 . . . , 0, so these four new moments mustbe included. However there is map to a set of different moments ML, SL, 0 . . . , 0 whichare in general non-linear combinations of the previous moments. The potentials are theniterated to higher orders indexing with n. It is important to note that the moments IL andso on are not given in terms of the source itself yet, they arise simply due to the presenceof the wave operator. The problem now is solving a wave equation with a known sourceas we found before, however the moments are singular at r = 0. This is the first case fora need to regularize these divergences. The approach is to rewrite the source tensor as
Παβ(n) → rBΠαβ
(n), (2.6.1)
where r := r/r0 is dimensionless, B ∈ C and Παβ := (16πG/c4)(−g)(tαβLL + tαβH ) . Theretarded integral solution to the wave equations is then
Hαβ(B) = −1ret
[rBχαβ(n)
], (2.6.2)
where −1ret represents the retarded integral solution. The idea is that the real part of B
can be taken large enough so that the order of the singularities of the moments in Λαβ(n)
are removed. The trick is then to consider H(B) as an analytic continuation with respectto B into the complex plane, then write the solution, (2.6.2), as a Laurent series andthen pick out the finite-part coefficient as B → 0. The BDI approach then shows thatin a neighbourhood of B = 0, a near zone expansion can be performed in terms of themoments IL to ZL. The core of this approach is to match these expansions of the exteriorfield to the inner field of the source. This matching involves expressing the multipoleexterior solution in terms of a near zone expansion. This is then equated to a multipoleexpansion of the near zone field. If M(h) is a multipole expansion of hαβ which is theexterior solution and h is a post-Newtonian expansion of h, then the ‘Matching equation’imposes
M(h) =M(h). (2.6.3)
The difference between h and M(h) is that h is the field valid everywhere in space-timewhile M(h) is a multipole expansion of h valid only outside the source and is singular atr = 0. This method gives
M(hαβ) = FPB=0−1ret
[rBM(Παβ)
]+
4G
c4
∞∑q=0
(−1)q
q!∂Qq
[1
rHαβ,Qq
], (2.6.4)
where
HαβQ = FPB=0
∫rBΛαβ(u,x′)x′Qqd
3x′. (2.6.5)
25

Chapter 2 2.6. ALTERNATE INTEGRATION METHODS
These equations require a little explaining. The operation FPB=0 represents taking thefinite part as B = 0 as mentioned previously. The first term on the right hand side of(2.6.5) is the mulitpolar solution to the vacuum field equations outside the source while thesecond term is reminiscent of (2.4.5) and contains the actual matter source contributionwhere Λαβ is defined as in (2.1.6) which we see contains Tαβ. These terms represent anear and a wave zone contribution except the integrals range over all space.
A second method known as DIRE (direct integration of relaxed Einstein equations)used by Will, Wiseman and Pati [5,11,18] also splits the integration region into a near andfar zone. The methods in Section 2.3 follow this particular partitioning of the integrationregion. It then evaluates them separately and exactly. As an example of the similarity(and one can prove, equivalence) between the DIRE and BDI approach is the DIRE versionof (2.6.4) and (2.6.5) which are
M(hαβ) = −1ret
[M(Παβ)
]W
+4G
c4
∞∑q=0
(−1)q
q!∂Qq
[1
rKαβ,Qq
], (2.6.6)
KαβQ =
∫N
Λαβ(u,x′)x′Qqd3x′. (2.6.7)
where N is the near zone defined by |x| < R and the subscript W implies the retardedintegral is truncated so that it extends only into the wave zone |x| > R. We can see thatthere is no finite part operation because the the retarded integral part no longer containsr = 0 in its its integration region where it diverges. This is exactly equivalent to (2.3.3)where instead the post-Newtonian parameter is ε = 1/c which is a slight abuse of notationsince ε should be dimensionless while c, the speed of light, has dimensions. We will alsopoint out again, that in our analysis we have largely neglected the wave zone contributionsto the potentials, that is the W → N and W → W parts. The reason for this is two-fold: firstly the wave zone contribution is negligible up to the 3 PN terms which requireaccuracy to O(ε8) and so do not show at the 1 PN order of equations (2.5.64)-(2.5.66) andfor the simpler reason that they are much more difficult to compute than the near zonecontributions and so are in some sense beyond the content contained here.
The ‘strong field point particle limit’ pioneered by Itoh and Futamese [19] is a highlyuseful formulation that does not require any regularizations. They define an explicit smallparameter ε exactly as we have in (2.2.1), and from it imply how the physical quantitiesof the system should scale with this ε. Their idea is that the internal fields of a body, suchas the members of an inspiralling compact binary, can be kept fixed as they are shrunkto approximate point particles. By scaling the mass of the body (M) in line with howits radius (R) shrinks, then the internal field Φ ∼ M/R can remain constant. With this,Futamase and Itoh partition into a near and a far zone however the near zone contributionis split into two pieces: a body zone B and other area N/B. The body zone is written interms of so called ‘body zone coordinates.’ In the near zone coordinates (τ,x), the sizeof the body zone shrinks as ε while the star shrinks as ε2 as ε → 0. In the body zonecoordinates, the star instead remains fixed in size while the body zone boundary expandsto infinity like ε−1 as ε → 0. In this way, the star never shrinks towards a Dirac deltaand the integrals are naturally convergent. It then uses a surface integral approach todetermine the equations of motion and has been calculated to 3PN order [7].
Other approaches include using the ADM formalism of general relativity to computeHamiltonians and is of use by Damour, Jaranowski and Schafer [9,20]. With these Hamil-tonians all the equations of motion can be found by Hamilton’s equations along withother relevant quantities such as angular momentum. Their most recent achievement isdetermining a 4PN order correct Hamiltonian for a binary point particle system [9]. The4PN order is known to have been notoriously difficult because the post-Newtonian expan-sions no longer converges. This occurs because when we consider the following near zone
26

Chapter 2 2.6. ALTERNATE INTEGRATION METHODS
expansion (in the notation of Futamese)∫f(τ − εr, . . . )dr =
∫f(τ)dr − ε
∫f(τ)dr +O(ε2), (2.6.8)
we ignore retardation. However since the radius r scales as ε−1, then the product rε willonly be small as we take ε → 0 if the integrals themselves decay sufficiently fast. At the4PN order the integrals do not due to the presence of tail terms and we find a blow upat this order. By controlling these terms, they were able to overcome this difficulty andachieve an impressive 4PN calculation.
It is certainly an achievement unto itself that despite the extreme difficulties inherentin General relativity, so many diverse methods have been created to handle it. Thecomplexity in the post-Newtonian regime leads to very long end results for the potentials,equations of motion and other important quantities and it is imperative that they becross-checked to identify any errors. This is one major reason why these approaches havesurfaced and it is remarkable that they are all entirely consistent in their end results. Itis simply a matter then of picking the approach that suits one best for the computationat hand.
27

Chapter 3
Equations of Motion and thePrecession of Mercury
One of the main reasons we want to determine the potentials and hence the metric is toexplore how matter will move in the curved space-time. To this end, we seek to deriveequations of motion for systems of particles based on the 1PN accurate potentials obtainedin the previous chapter. These equations of motion are differential equations that describehow acceleration of a body is dependent on its position and its velocity. The integration ofthese then gives the world-line of the particle. In Section 3.1, we use a Lagrangian approachto determine the 1PN accurate equations of motion for an N point particle system. Wealso discuss the surface integral method, which is an elegant alternative method to achievethe same end results. Reducing to a two-body system, we find in Section 3.2 that theorbits actually rotate in time and we derive the famous anomalous perihelion precessionformula which describes the angular amount that the orbit rotates. The application ofthis formula to the orbit of the planet Mercury was historically the first great predictionof General relativity.
3.1 Deriving equations of motion
Ever since the laws of Newtonian gravity were written, their major application was to theorbits of celestial bodies. The two-body problem consisting of two orbiting point masseswas solved completely by Newton, who in 1687, verified analytically the elliptical orbitsthat Kepler had proposed 78 years previously. The more general N -body system (N ≥ 3)is much more difficult to analyse and exhibits chaotic behaviours. While it is relativelysimple to write down the equations of motion for an N -body Newtonian system, it ismuch more difficult in General relativity. In fact, no exact two-body General relativisticexpression exists yet. This is why we must use approximation methods such as the post-Newtonian formalism in order to find equations of motion accurate to a high order.
Just as there are many formulations of classical dynamics, such as those due to Newton,Lagrange, Hamilton, Hamilton and Jacobi etc, there are many ways we can determine theequations of motion for a post-Newtonian system. We will explore two methods: theLagrangian and surface integral approaches. A Hamiltonian formulation would followsimply from the results of the Lagrangian calculations. We begin with the Lagrangianapproach which requires an expansion of the components of the metric accurate to O(ε4).A general expansion for the metric is
gαβ = ηαβ + hαβ −1
2hηαβ + hαµh
µβ −
1
2hhαβ +
(1
8h2 − 1
4hµν h
µν
)δαβ. (3.1.1)
28

Chapter 3 3.1. DERIVING EQUATIONS OF MOTION
The components are using our expansions for the 1PN potentials,
g00 = −1 +1
2h00(4) −
3
8(h00(4))
2 +1
2δabhab(4) +O(ε5), (3.1.2)
g0a = h0a(3) +O(ε5), (3.1.3)
gab = δab +1
2δabh00(4) +
[hab +
(1
2h00(4) −
1
2hcd(4)δ
cd − 1
8h2
00(4)
)δab
]+O(ε5), (3.1.4)
where we have written, for example, h00(4) = η0µη0ν hµν(4) = hµν(4). The equations of motion
are local to the scales of the system so we use the near zone 1PN potentials which are(2.5.64)-(2.5.66). Inserting these expressions into (3.1.2)-(3.1.4), we find
g00 = −1 +2ε2
c2U +
2ε4
c4
(ψ +
1
2¨X − U2
)+O(ε5), (3.1.5)
g0a = −4ε3
c3Ua +O(ε5), (3.1.6)
gab = δab +2ε2
c2δabU +
2ε4
c4
[2Pab +
(ψ +
1
2¨X − P + U2
)δab
]+O(ε5). (3.1.7)
To proceed with Lagrangian dynamics, we need a Lagrangian. Since free particlesmove on geodesics of the space-time, we consider an action that encodes motion alonggeodesics. We take the action
S = −c∫ √
−gµνvµvνdt, (3.1.8)
and transform it to the dynamical time τ = εt which yields
S = −cε
∫ √−gµν vµvνdτ, (3.1.9)
where vµ = d(ct,x)dτ = (c/ε,v). We then have the Lagrangian we were looking for as
L = −cε
√−gµν vµvν . (3.1.10)
As a small aside, we will show that the Newtonian potentials of (2.5.14)-(2.5.16) do indeedgive the Newtonian equations of motion with this Lagrangian. Substituting we find
L = −cε
√−c
2
ε2
(−1 +
2ε2
c2U
)− v2
(1 +
2ε2
c2U
)= −c
2
ε2
√1− 2ε2
c2U − ε2
c2v2 + +O(ε4)
= −c2
ε2+ U +
1
2v2 +O(ε2)
and substituting this into the Euler-Lagrange equations,
d
dτ
∂L
∂va=
∂L
∂xa, (3.1.11)
yields the equations of motionaa = ∂aU +O(ε2). (3.1.12)
Taking the spatial derivatives of (2.5.10), we have the more familiar form
aA = −∑B 6=A
GmB
z2AB
nAB. (3.1.13)
29

Chapter 3 3.1. DERIVING EQUATIONS OF MOTION
For the 1PN equations, we make use of the components of the metric we calculatedearlier in (3.1.2)-(3.1.4) and we find that to the order we require, O(ε4), the Lagrangian is
L = −cε
√−g00v0v0 − 2g0av0va − gabvavb
= −
√1− ε2
c2
(v2 + 2U
)− 2ε4
c4
(ψ +
1
2¨X − U2 − 4Uava + U v2
)+O(ε6)
= −c2
ε2+
1
2v2 + U +
ε2
c2
(1
8v4 + ψ +
1
2¨X − 1
2U2 − 4Uav
a +3
2U v2
)+O(ε6). (3.1.14)
Inserting this into the Euler-Lagrange equations and turning the handle we obtain theequations of motion of a test particle moving on a geodesic of this space-time, which are
aa = ∂aU +ε2
c2
[(v2 − 4U)∂aU − 4vavb∂bU − 3va
˙U + ∂aψ
+1
2∂a
¨X + 4
˙Ua − 4(∂aU b − ∂bUa)vb
]+O(ε4). (3.1.15)
Here aa are the components of the acceleration which is defined as ˙va =: aa. We have alsomade use of the Newtonian acceleration here once which says that aa = ∂aU +O(ε2). Inthe Newtonian limit ε→ 0, the second (and higher) term vanishes and we are left with theNewtonian result. The expression contained in the ε2 bracket is the 1PN order correctionto the equations of motion.
There are many differences between this expression and the Newtonian one. Firstly,the acceleration of the body is dependent on its own velocity not just its position alone. In
fact it is more difficult than this because of the presence of the ψ term and˙U terms which
are proportional to the velocities of all the gravitating bodies. A more striking departurefrom Newtonian gravity is that the mass of the test particle itself influences its motiondue to the ψ term. Therefore, we no longer have the interpretation of the test particlesimply moving through a background field produced by our source. It moves through acomplicated non-linear combination of a ‘background’ field and this fields interaction withthe field of the test mass. This is another prime example of the non-linearity of Generalrelativity.
An explicit version of the equations of motion can be obtained by substituting into(3.1.15) the definitions of (2.5.55) and (2.5.57) and evaluating the derivatives. This leads toa long expression for the acceleration of any one of the particles but we will not reproduceit here. While its derivation was an early triumph in General relativity, there is littlephysical meaning we can directly extract from it in comparison to simpler equations.Instead, we note that these equations drastically simplify in the case of a binary system.If the coordinate system is shifted to the centre of mass which can be set as the originof the coordinate system, then we can instead write down one acceleration vector whichdescribes the relative acceleration between body 1 and body 2, that is a := a1− a2. Thisis given by
a = −Gmrn+
ε2
c2
−Gmr2
[(1 + 3η)v2 − 3
2η(n.v)2 − 2(2 + η)
Gm
r
]n+ 2(2− η)
Gm
r2(n.v)v
.
(3.1.16)Here n := r/r where unfortunately here we mean r = er as in a unit vector in theradial direction, m := m1 + m2, η := (m1m2)/(m1 + m2)2 and the expression n.v canbe interpreted as the radial velocity. Splitting the components of the acceleration vectorinto radial and angular pieces using plane polar coordinates will then give the explicitdifferential equations that must be solved to fully determine the motion of the relative
30

Chapter 3 3.1. DERIVING EQUATIONS OF MOTION
system and hence that of each particle (since the transformation from two-body to relativesystem is ‘invertible’). The most well known post-Newtonian effect which can be derivedfrom (3.1.16) is the precession of the perihelion of the orbits.
Another approach to obtain equations of motion is the surface integral method. Themotivation for this is obtaining an extension to a useful Newtonian case. Consider anextended body in a Newtonian gravitational field given by the potential Φ. The force itexperiences is given by the volume integral
F i =
∫Vρ∂Φ
∂xidV, (3.1.17)
where the volume covers the whole object. This form is difficult to work with in practicesince it requires detailed knowledge of the interior of the source due to the presence ofthe density term. Motivated by the Poisson equation and Gauss’ law, we can postulate acertain stress-tensor
Kij :=1
4πG
(∂iΦ∂jΦ− δij
2∂kΦ∂kΦ
), (3.1.18)
which has the sought after property that
4πG∂jKij = (∂j∂
iΦ)∂jΦ + ∂iΦ∂j∂jΦ− ∂i(∂kΦ)∂kΦ
= ∂iΦ ∂j∂jΦ. (3.1.19)
The utility of this identity is that when we invoke the Poisson equation, we find
ρ∂iΦ =1
4πG∂j∂
jΦ ∂iΦ = ∂jKij , (3.1.20)
which we can substitute into (3.1.17). This is then ready for a healthy dose of the Diver-gence theorem to obtain
F i =
∮∂VKij dSj . (3.1.21)
What we have done here is to reduce the volume integral to a surface integral whichis essentially summing the stresses on surface elements of the body. We have entirelyeffaced the problem of the complicated interior. The reader with a background in classicalelectromagnetism may realise that the form of our tensor Kij in (3.1.18) is very closelyrelated to the Maxwell stress tensor except written in terms of the gravitational potentials(hence the derivatives) rather than the fields.
Now that we have motivated the use of surface integrals, we will discuss its use in thecontext of General relativity. The goal is to determine equations of motion for a system,and in the Newtonian case we know that acceleration is proportional to the time rateof change of the momentum. We wish to do something similar here making use of theLandau-Lifshitz formulation as discussed in Section 2.1. We define
PαA :=1
c
∫VA
(−g)(T 0α + t0αLL)dV, (3.1.22)
as a momentum four-vector of body A and where VA is a sphere centred on zA, the positionof the particle and does not intersect the spheres of other bodies, such as a VB. We willgive this much more meaning in Section 4.4 but for now we just work with it as is. Wewould like to calculate the time derivative of this four-vector however there is an importantsubtlety here: body A is in motion and so the spherical volume also moves in space sothat it is always enclosing the particle. Taking a time derivative must take this movingsurface into account. In this case we take the surface to be moving at the same velocity
31

Chapter 3 3.1. DERIVING EQUATIONS OF MOTION
as that of the particle, vA. By the calculus of moving surfaces, the time rate of change ofa field F moving with veloctity v is given by
d
dt
∫VF dV =
∫V
∂F
∂tdV +
∮∂VFv.dS. (3.1.23)
Applying this to (3.1.22), we find
dPαAdx0
=1
c
∫VA
∂
∂x0(−g)(T 0α + t0αLL)dV +
1
c2
∮∂VA
(−g)(T 0α + t0αLL)vcAdSc
= −1
c
∫VA
∂
∂xa(−g)(T 0α + t0αLL)dV +
1
c2
∮∂VA
(−g)(T 0α + t0αLL)vcAdSc
=1
c2
∮∂VA
(−g)(tcαLL − t0αLLvcA/c)dSc, (3.1.24)
where we have used the conservation identity ∂0[T 00 +t00LL] = −∂a[T 0a+t0aLL] from (2.1.11),
the divergence theorem and set Tαβ = 0 on the surface. Introducing a dipole like 3-vector
DaA :=
1
c2
∫VA
(−g)(T 00 + t00LL)(xa − zaA)dV (3.1.25)
and taking a derivative with respect to x0 along with converting all volume integrals tosurface integrals, we find the identity
P aA = MAvaA +QaA + Da
A. (3.1.26)
The extra terms are
MA :=1
cP 0A, QaA :=
1
c
∮∂VA
(−g)(t0bLL − t00LLv
bA/c)(x
a − zaA)dSb, (3.1.27)
where MA can be interpreted as a mass like quantity and QA does not have any physicalsignificance. As it stands, (3.1.26) is just an identity relating surface integrals howeverit is written suggestively to imply some deeper physical meaning such as the presence ofthe first two terms, which appear to be a linear momentum definition. From (3.1.26) it isstraightforward to take a further time derivative to obtain a law of motion for each body
MAaA = PA − MAvA − QA − DA. (3.1.28)
The surface integral approach therefore reduces the problem of finding the equations ofmotion to the evaluation of surface integrals.
While we will not proceed with explicit calculations here we will mention how thesesurface integrals can be evaluated in practice. The first step is evaluating the relevantcomponents of the Landau-Lifshitz pseudo-tensor accurate to the required order. Thesurface integrals are then evaluated over the surface of a sphere and so these integralsbecome spherical averages in the sense of (A.2.6), and are evaluated accurate to an orderrequired. The computations are arguably far longer than the Lagrangian approach detailedabove for the 1PN order however the surface integral approach works particularly well inthe work of Futamese [7], who uses it to calculate in the strong field point particle limit aswe discussed earlier. At these low orders, it is simply a matter of choice which approachone chooses.
32

Chapter 3 3.2. APPLICATION TO PRECESSION OF MERCURY
3.2 Application to precession of Mercury
The orbit of Mercury about the Sun is observed to rotate and this effect is famouslyknown as the precession of the perihelion of Mercury. The amount of rotation is closeto 575 arc-seconds per century of which 531 arc-seconds per century [21] can be entirelyexplained by the effects of the other planets perturbing the Mercury-Sun system. In 1859,the French astrophysicist Urbain Le Verrier accurately calculated the effects due to allthe other planets and found that there was an anomalous amount of 43” per century [22]that could not be explained using Newtonian theory. He proposed that there should existanother planet called ’Vulcan’ close to Mercury, which would be the cause of this shift.Unfortunately, no such planet was ever found which implied that Newtonian gravity maynot be the final word on the motions of the heavens. There were of course many otherattempts to explain this shift mostly by adding extra terms to the to the gravitationalforce, however these either did not work or incorrectly explained other known phenomenaand were abandoned. The resolution came in 1916, when Einstein published a paper [23]based on his General theory of relativity that naturally and accurately explained this shift.He predicted that amount of this precession was
δφ =6πG(MMercury +M)
c2a(1− e2), (3.2.1)
where a is the semi-major axis length of the orbit and e is its eccentricity. Applying thisto the known values, gives 42.8 arc-seconds per century which exactly accounts for theanomaly. This was the first of many great predictions of General relativity which gavegreat confidence to its correctness as a physical theory.
In this section, we seek to derive (3.2.1) using the 1PN equations of motion or inactual fact, the 1PN accurate relative Lagrangian. The approach we take here is to useHamilton-Jacobi theory, which is another formulation of classical dynamics much like theLagrangian or Hamiltonian mechanics. The fundamental quantity is now a function inconfiguration-space S(qi, t) which determines the path of the system and is essentially theaction evaluated along the true path. The evolution of S in the Newtonian time τ = εt isdetermined by the Hamilton-Jacobi equation which is
∂S
∂t= −H
(qi,
∂S
∂qi,τ
ε
), (3.2.2)
where our N -generalised coordinates in configuration-space are labelled qi, pi = ∂S/∂qiand H is the Hamiltonian which is itself related to the Lagrangian by
H(qi, pi, τ/ε) =∑i
piqi − L(qi, ˙qi, t),
where pi = ∂L/∂ ˙qi. The dot represents differentiation with respect to τ here. For referencethe Hamiltonian formalism satisfies its own equations which determine the motion and theyare
˙pi = −∂H∂qi
, (3.2.3)
qi =∂H
∂pi, (3.2.4)
−∂L∂τ
=∂H
∂τ. (3.2.5)
33

Chapter 3 3.2. APPLICATION TO PRECESSION OF MERCURY
In the special case where the Hamiltonian is conserved, ∂H/∂τ = 0 which occurs whenH does not explicitly depend on τ , then we can take another time derivative of (3.2.2) toobtain
∂2S
∂τ2= 0.
Solving this we find S(qi, τ) = W (qi) − Eτ where E is a constant and W is an arbitraryfunction only of the coordinates qi. Now (3.2.2) reduces to
E = H
(qi,
∂S
∂qi
), (3.2.6)
where the constant E appears to bear a relationship to the total energy of the system.Another special case can occur when one of the generalised coordinates qj where 1 ≤ j ≤ Nis cyclic. This occurs when ∂H/∂qj = 0. From Hamilton’s equations, ˙pj = −∂H/∂qj = 0and hence pj = J where J is a constant. We also have the definition that pj = ∂S/∂qj ,so then S = Jqj + W (qi 6=j), where W (qi 6=j) is an arbitrary function of the remainingcoordinates. In the simple case where the configuration space contains only two generalisedcoordinates, say q1 and q2, and where the Hamiltonian is conserved and q2 is cyclic, thenwe can write
S(q1, q2, τ) = −Eτ + Jq2 + W (q1). (3.2.7)
From these considerations, we can see that whenever we have a cyclic coordinate, thetrue action S is separable in that coordinate. To determine the function W we need theconjugate momenta p1 since p1 = dW/dq1 and hence we could then formally write
W (q1) =
∫p1dq1. (3.2.8)
To complete this discussion, we write the Euler-Lagrange equations as
˙pi =d
dτ
(∂L
∂qi
)=∂L
∂qi, (3.2.9)
using our new notation here for a set of arbitrary generalised coordinates qi.With the preliminaries out of the way, we begin to formulate the actual problem at
hand following an example given by Landau and Lifshitz [24]. We consider the case oftwo orbiting bodies of mass m1 and m2 respectively. Based on (3.1.14), we can write theLagrangian for a two-body system in terms of the relative position. For this we set thecentre of mass to be at the origin of the coordinate system so that our the Lagrangianis written in terms of the distance from this origin. A Lagrangian that gives the 1PNaccurate relative acceleration which was (3.1.16), is
L =1
2µv2 +
Gmµ
r+ε2
c2
1
8(1− 3η)µv4 +
1
2(3 + η)
Gmµ
rv2 +
Gηmµ
2r(n.v)2 − G2m2µ
2r2
,
(3.2.10)where we recall that m := (m1 + m2) is the total mass, µ := m1m2/m is the reducedmass, η := µ/m is a dimensionless reduced mass and n = r is a unit vector in the radialdirection. Our generalised coordinates here are the plane polar r, φ (which are our qi)and their derivatives r, φ (which are our qi). The conjugate momenta are pr = ∂L/∂rand pφ = ∂L/∂φ. Since the velocities are expanded as v2 = r2 + r2φ2, we notice thatthe Lagrangian is explicitly independent of the coordinate φ. From the Euler-Lagrangeequations of (3.2.9), ˙pφ = 0. This gives rise to conservation of angular momentum in the
34

Chapter 3 3.2. APPLICATION TO PRECESSION OF MERCURY
system. The conjugate momenta can be combined into a momentum vector, where wecan write p = ∂L/∂v noting that we mean we take each component pa and then combinethem as a vector. The momentum vector we find is
p = µv +ε2
c2
1
2(1− 3η)µv2 + (3 + η)
Gmµ
r
v + ε2
Gmηµ
c2r(n.v)n+O(ε4). (3.2.11)
Noting that p = µv +O(ε2) then we define
α =1
2(1− 3η)µv2 + (3 + η)
Gmµ
r
=1
2(1− 3η)p2/µ+ (3 + η)
Gmµ
r+O(ε2),
and
β =Gmηµ
r(n.v)
=Gmηµ
r(n.p) +O(ε2),
which allows us to write p = µv + (ε2α/c2)v + (ε2β/c2)n. The squared magnitude of themomentum vector is then
p2 = µ2v2 +2ε2αµ
c2v2 +
2ε2βµ
c2(n.v) +O(ε4). (3.2.12)
Rearranging this we find
v2 =p2
µ2− 2ε2αµ
c2
p2
µ3− 2ε2β
c2µ2(n.p) +O(ε4). (3.2.13)
While these computations may seem trivial they are necessary since we wish to find anaction which can be written as in (3.2.7) which will involve finding a Hamiltonian andwriting it in terms of the conjugate momentum pi, rather than the derivatives qi allowingus to find W given by (3.2.8). In our situation, we need to write a Hamiltonian in termsof p which involves removing all velocity v terms.
The Hamiltonian is given by H = p.v− L, and can be written in terms of the momen-tum using (3.2.13), and we have
H =p2
2µ−Gmµ
r− ε2
8c2µ3(1−3η)p4−ε2 Gm
2c2r
(3 + η)
µp2+ε2
G
2c2r(n.p)2+ε2
G2m2µ
2c2r2, (3.2.14)
where we neglect terms of order ε4 and higher. We can instantly make a few observations.The first is that the Hamiltonian is explicitly time independent and is thus conserved.Since H = E, then at the 1PN order we have conservation of energy so dE/dτ = 0and hence E is constant. Secondly, the angular coordinate φ is cyclic so we also haveconservation of angular momentum as we have seen and we can then write pφ = J whereJ is the constant angular momentum. We therefore have a conserved Hamiltonian withtwo generalised coordinates of which one is cyclic. We considered this exact scenario earlierand we found that the true action S from (3.2.7) becomes
S(r, φ, τ) = −Eτ + Jφ+
∫prdr. (3.2.15)
At the Newtonian order, one finds that φ = J/mr2 along with p2 = µv2 = µr2 + µr2φ2.We then have that
p2 = p2r + J2/r2. (3.2.16)
35

Chapter 3 3.2. APPLICATION TO PRECESSION OF MERCURY
Also at this order,
E =p2
2µ− Gmµ
r,
which implies that
p2 = 2µ
(E +
Gmµ
r
). (3.2.17)
Substituting (3.2.16) and (3.2.17) into (3.2.14) yields
E =1
2µ
(1− ε2Gµ
c2r
)p2r+
J2
2µr2−ε2 (1− 3η)
2c2µ
(E +
Gmµ
r
)2
−ε2GmEc2r
(3+η)−ε2G2m2µ
c2r2(5/2+η).
(3.2.18)Solving for pr we obtain
p2r =
Ar2 +Br − Cr(r − rg)
, (3.2.19)
where
A := 2µE + ε2(1− 3η)E2
c2, (3.2.20)
B := 2Gmµ2 + ε24GmµE
c2(2− η), (3.2.21)
C := J2 − ε2G2m2µ2
c2(6− η), (3.2.22)
and rg := ε2Gµ/c2. For the integral
W (r) =
∫ [Ar2 +Br − Cr(r − rg)
]1/2
dr, (3.2.23)
we make a transformation r(r − rg) = R2. The radius rg is recognisable as being closeto the Schwarzschild radius of a massive body with mass µ. For orbiting bodies we canassume that in the relative frame the distance of the body from the origin is much greaterthan rg, that is when rg r, then R ≈ r − rg/2 or r ≈ R + rg/2. This condition is validfor essentially all cases except for very close orbits near a black hole. Expanding terms inpowers of rg/R and noting that rg = O(ε2), then the integral of (3.2.23) becomes
W ≈∫ [
A+(rgA+B)
R− (D − rgB/2)
R2
]1/2
dR. (3.2.24)
The shift in the constant term in the R−2 term evaluates to
D − rgB/2 = J2 − ε2 6G2m2µ2
c2,
where we neglect higher order terms. We therefore find that
W (r) =
∫ [A+
B′
r− 1
r2
(J2 − ε2 6G2m2
1m22
c2
)]1/2
dr, (3.2.25)
where A and B′ are constants. The term k2 := ε26G2m2
1m22
c2is responsible for the non-zero
precession of the perihelion.
36

Chapter 3 3.2. APPLICATION TO PRECESSION OF MERCURY
Utilising the fact that S acts as a generator of canonical transformations [25], then wecan think of the constant J along with the constant K = ∂S/∂J as a pair of canonicalcoordinates. The trajectory of the system is then given by ∂S/∂M = C0 which becomes
φ+∂W
∂J= C0, (3.2.26)
where C0 is a constant. After one full revolution this becomes
∆φ = −∂∆W
∂J. (3.2.27)
Putting this to one side for the moment, we return to (3.2.25) and split the term causingthe precession apart from the other terms as
W =
∫ √A+
B′
r− J2
r2
√√√√1 +k2(
A+ B′
r −J2
r2
)r2dr
≈∫ √
A+B′
r− J2
r2dr +
k2
2
∫dr
r2√A+ B′
r −J2
r2
= W 0 − k2
2J
∂W 0
∂J,
where in the second line we made use of the Binomial expansion since k2 = O(ε2), and
have defined W 0(r) :=∫ √
A+ B′
r −J2
r2dr. Over a revolution, ∆W = ∆W 0 − k2
2J∂∆W 0
∂J .
When there is no precession, the ∆φ = 2π, so then −∂∆W 0/∂J = ∆φ = 2π. Substitutingthese results into (3.2.27), we find
∆φ = −∂W0
∂J+k2
2
∂
∂J
[1
J
∂W 0
∂J
]
= 2π +k2
2
∂
∂J
[−2π
J
]= 2π +
πk2
J2.
We find that under a full rotation there is a little extra amount that the orbit will rotatewhich is given by πk2/J2. At the Newtonian order, we can make use of the Keplerianrelation J2 = Gm3η2a(1−e2) where a is the semi-major axis length and e is the eccentricityof the orbit. Any higher order changes to this formula would appear at the ε2 terms butsince k2 = O(ε2), these terms are relegated to O(ε4) and are neglected. Therefore the shiftδφ in the perihelion is
δφ = ε26πGm
c2a(1− e2). (3.2.28)
This formula is in agreement with that obtained by Damour and Deruelle [26] by inte-grating exactly the 1PN equations of motion. Applying this to the Mercury-Sun systemyields a prediction of 43” per century as in (3.2.1).
37

Chapter 4
Gravitational Waves and theHulse-Taylor Binary
After finding equations of motion, the next leap required of post-Newtonian approxima-tions is to study the generation and propagation of gravitational waves. In Section 4.1, wediscuss the mathematical representation of the potentials that encapsulates the presence ofgravitational waves in the far-away wave zone. This involves converting into the so-calledtransverse, traceless gauge and rewriting our potentials there. From these, the perturba-tions to the metric in the far-away wave zone due to gravitational waves becomes clear:they are the result of the quadrupole mass moment. To illustrate these results, Section4.2 works through some example waveforms. In Section 4.3, we briefly examine the effectof this metric perturbation on space-time by using the concept of geodesic deviation. Thisanalysis reveals a key detection method for gravitational waves. In order to study theeffects of these waves on the local orbital motion of the source system, we need to knowthe rate at which energy is lost due to emission. This leads us to the celebrated quadrupoleformula of Einstein in Section 4.4 along with a brief discussion about the tricky concept ofenergy in General relativity. We then consider a non-relativistic two body system in boundelliptic orbits and calculate its rate of energy loss due to gravitational waves in Section4.5. We then use these formulae to analyse the binary pulsar PSR1913+16 whose observedorbital motion agrees brilliantly with the equations derived previously. We conclude withSection 4.6 where we discuss the higher PN expansions of the quadrupole formula andthere use as templates for data analysis at next generation gravitational wave detectorssuch as LIGO, VIRGO and GEO600.
4.1 Transverse-traceless potentials and polarisations
The transverse-traceless gauge
The goal of gravitational wave theory is to determine the potentials in a far-away wavezone (e.g. a detector on Earth). In this regime, the O(r−1) terms dominate over all terms
of order r−2 and higher. The potentials can be written as hαβ = hαβNε + hαβWε, where the
field point is x ∈ W(ct, x). The near zone contribution can be expanded using (2.4.8),while much more difficult analyses is required for the wave zone contribution. The general
38

Chapter 4 4.1. TRANSVERSE-TRACELESS POTENTIALS AND POLARISATIONS
behaviour in the far-away wave zone can be written as
h00 = ε24GM
c2r+ ε4
G
c4rC(τr,Ω), (4.1.1)
h0a = ε4G
c4rDa(τr,Ω), (4.1.2)
hab = ε4G
c4rAab(τr,Ω), (4.1.3)
where τr = t − εr/c and O(r−2) terms have been omitted. We then seek to expand Da
and Aab into irreducible components; i.e. transverse and longitudinal components,
Da = DΩa + DaT, (4.1.4)
ΩaDaT = 0, (4.1.5)
Aab =1
3δabA+
(ΩaΩb −
1
3δab)B + ΩaAbT + ΩbAaT + AabTT, (4.1.6)
ΩaAaT = 0, (4.1.7)
ΩaAabTT = 0, (4.1.8)
δabAabTT = 0, (4.1.9)
where (4.1.5), (4.1.7) and (4.1.8) are longitudinal-free conditions for the transverse com-ponents and (4.1.9) is a trace free condition, hence the name ‘transverse trace-less’ tensoror TT tensor. Substituting these into the far zone potentials and imposing the harmonicgauge conditions, ∂βh
αβ = 0, and omitting O(r−2) terms, allows us to remove some re-dundant quantities. The potentials then become
h00 = ε24GM
c2r+ ε4
G
c4r
1
3(A+ 2B), (4.1.10)
h0a = ε4G
c4r
[1
3(A+ 2B)Ωa + AaT
], (4.1.11)
hab = ε4G
c4r
[1
3δabA+
(ΩaΩb − 1
3δab)B + ΩaAbT + ΩbAaT + AabTT
]. (4.1.12)
Interestingly, four more terms are just a gauge, and can be removed. To implement thisgauge, we introduce a small perturbation to the Minkowski metric
gαβ = ηαβ + δgαβ, (4.1.13)
with a gauge produced by a four-vector ζα(cτ, x) such that the perturbation transformsaccording to
δgOLDαβ → δgNEW
αβ = δgOLDαβ − ∂αζβ − ∂β ζα. (4.1.14)
Expanding the metric to linear terms in the potentials because quadratic terms will beO(r−2), which we ignore, we find
ηαβ + δgαβ = gαβ = ηαβ + hαβ −1
2hηαβ +O(h2) (4.1.15)
and thus
hαβ = δgαβ −1
2δgηαβ +O(r−2), (4.1.16)
since it can be shown that h = −δg where ηαβhαβ := h and similarly for δg. Gaugetransforming (4.1.16) according to (4.1.14), we find that the potential transforms accordingto
hαβOLD → hαβNEW = hαβOLD − ∂αζβ − ∂β ζα + (∂µζ
µ)ηαβ. (4.1.17)
39

Chapter 4 4.1. TRANSVERSE-TRACELESS POTENTIALS AND POLARISATIONS
This transform implies that the harmonic gauge conditions become
∂βhαβOLD → ∂βh
αβNEW = ∂βh
αβOLD −ζα (4.1.18)
= −ζα. (4.1.19)
In order to preserve the conditions ∂βhαβ = 0 under a such a gauge transfomration, we
are free to choose ζ such that ζα = 0. This is a homogeneous wave equation which issatisfied in the far-away wave zone if we suppose that the components satisfy
ζ0 = ε3G
c3rα(τr, Ω) +O(r−2), (4.1.20)
ζa = ε3G
c3rβa(τr, Ω) +O(r−2). (4.1.21)
We can then decompose βa into βΩa + βaT with ΩaβaT = 0, and substitute (4.1.20) and
(4.1.21) along with (4.1.10), (4.1.11) and (4.1.12) into the gauge transformation (4.1.17).We find that it produces the following changes
A→ A+ 3 ˙α− ˙β,
B → B + 2˙β,
AaT → AaT +˙βbT,
AabTT → AabTT,
where a dot indicates differentiation with respect to τr. Therefore we are free to choosethe components of ζα such that A, B and AaT vanish leaving only AabTT standing after weexhaust all our coordinate freedom. Hence the potentials take the form in the far-awaywave zone of
h00 = ε24GM
c2r+O(r−2), (4.1.22)
h0a = O(r−2), (4.1.23)
hab = ε4G
c4rAabTT +O(r−2), (4.1.24)
where ΩaAabTT = 0 and δabA
abTT = 0. These are the key equations for this subsection. Since
we have used up all our coordinate freedom, the terms left standing must be physicallyimportant. In Section 4.3, we give a brief explanation of the physical effect these potentialshave on space-time.
While so far we have kept Aab somewhat arbitrary, we will now match it to the prop-erties of the source itself. We noted its appearance in (2.5.43) at second order. At the1PN order we have
Aab = 2Iab(2)(τr) (4.1.25)
and therefore the spatial components of the potential take the form
hab = ε42G
c4rIab(2)(τr) +O(r−2), (4.1.26)
where τr = τ − εr/c is the retarded time and
Iab :=
∫ρxaxbd3x. (4.1.27)
Here ρ is the Newtonian order term as T 00(2) = c2ε2ρ. Therefore the waves are generated
by the matter quadrupole moment of the source.
40

Chapter 4 4.1. TRANSVERSE-TRACELESS POTENTIALS AND POLARISATIONS
When we find a suitable potential we can then take the TT-part to obtain the wavefield.A method to do this is to introduce the TT projector which acts on a symmetric tensorto obtain its TT part, as below
AabTT = (TT)abcdAcd.
The TT projector works by extracting the transverse part and then removing the traceand can be written as
(TT)abcd := P ac Pbd −
1
2P abPcd, (4.1.28)
where P ab := δab −ΩaΩb is called the transverse projector. For example consider a decom-position of an arbitrary contra-variant vector Aa = AΩa+AaT. Acting with the projectionoperator we find
P ab Ab = (δab − ΩaΩb)(AΩb +AbT)
= ΩaA− ΩaA+ δabAbT − ΩaΩbA
bT
= AaT,
where we have used the fact that ΩbAbT := 0, hence the name transverse projector.
Wave polarisation
If we have a symmetric, TT tensor, then we can decompose it into an angular basis,
A+ = fab(θ, φ)AabTT = fab(θ, φ)Aab, (4.1.29)
A× = gab(θ, φ)AabTT = gab(θ, φ)Aab, (4.1.30)
since f and g turn out to be already transverse, trace-free operators. The functions f andg are defined as
fab(θ, φ) =1
2(θaθb − φaφb),
gab(θ, φ) =1
2(θaφb + φaθb),
where 1
θ := [cos θ cosφ, cos θ sinφ,− sin θ], (4.1.31)
φ := [− sinφ, cosφ, 0], (4.1.32)
and the projection operator satisfies the identity Pab = θaθb+φaφb. It can be easily shownusing the definitions that fabf
ab = 1/2, gabgab = 1/2 and fabg
ab = 0. Therefore we havefound a basis of tensors to expand the potentials with, which are
e+ := θ ⊗ θ − φ⊗ φ, (4.1.33)
e× := θ ⊗ φ+ φ⊗ θ, (4.1.34)
where we have, in terms of components, eab+ := 2fab and eab× := 2gab. The wave field tensorin the TT gauge habTT can then be written as a linear combination of these basis tensors as
hTT = h+e+ + h×e× +O(r−2). (4.1.35)
Now (4.1.29) and (4.1.30) have a geometrical meaning as projections of the full wavefield tensor onto its polarisation basis. It is common to see a gravitational wave-fielddecomposed into ‘plus’ and ‘cross’ terms, h+ and h× since they can be related to how adetector measures a gravitational wave.
1Note that the hats used here are to indicate unit vectors not functions of the dynamical time τ asbefore.
41

Chapter 4 4.2. PARTICULAR GRAVITATIONAL WAVE FIELDS
4.2 Particular gravitational wave fields
Gravitational waves in vacuum
Firstly, we consider the waves emitted from a far-away, non-stationary source. In thisregion, the fluctuations are assumed to be weak but are not time independent since thesource may have undergone some strong motions to emit these waves and we only receiveit much later as a result of retarded times. We consider only the first order approximationto (2.1.5) in vacuum (Tαβ = 0) where
hαβ = 0. (4.2.1)
We can postulate a solution to this wave equation in the form of a plane wave, that is
hαβTT = Aαβeikρxρ (4.2.2)
where Aαβ are a set of 10 independent (complex) constants (since Aαβ is symmetric) andkµ is the wave vector. Upon finding a suitable solution we should take the real part of thissince this is what has physical significance. If we consider the divergence of this solutionwe find
∂µhαβTT = ikµAαβeikρx
ρ= ikµAαβ, (4.2.3)
and from the definition of the d’Alembertian := ηµν∂µ∂ν we find that for (4.2.2) to bea non trivial solution to (4.2.1), we require that
kµkµ = 0. (4.2.4)
This implies that the four-vector k is a null vector and hence the speed of propagation ofthis wave is c. The gauge condition ∂βh
αβ is now ∂βAαβeikρxρ
= 0 and hence
Aαβkβ = 0. (4.2.5)
This is a constraint on the coefficients of the tensor Aαβ. We still have two more conditionswe can impose which are the fact that hαβTT is by definition transverse and trace-free. Thesetwo conditions imply
ΩbAab = 0, δαβAαβ = 0. (4.2.6)
We now make a specialisation for a wave travelling in the Cartesian z-direction and wechoose k = (ω/c, 0, 0, k). This implies that θ = φ = 0 and hence Ω = (0, 0, 1). From thetransverse condition of (4.2.6), we find that Aα3 = 0 and using this and (4.2.5) we haveAα0 = 0. From the vanishing of the trace and the previous property we have A11 = −A22.The only other remaining terms are A12 = A21 where we use the fact that hαβ is asymmetric tensor (this comes from the symmetry of the metric tensor and (2.1.3) whichdefines hαβ). Therefore the potential hαβ becomes, in matrix form,
hαβ =
0 0 0 00 Axx Axy 00 Axy −Axx 00 0 0 0
ei(kz−ωt). (4.2.7)
We have replaced the indices (1, 2, 3) with (x, y, z). The inner 2 × 2 matrix of A termsindicates the presence of two polarisation states for the wave which we will see soon arethe observables of the wave.
Now that we have found the wave-field (subject to taking the real part), we can deter-mine the metric. From (2.1.3), we can determine
√−ggαβ using (4.2.7). Next we can use
the fact that det(√−ggαβ) = (
√−g)4/det(gαβ) = g2/g = g and we find that
g = −1 +O(r−2). (4.2.8)
42

Chapter 4 4.2. PARTICULAR GRAVITATIONAL WAVE FIELDS
We can then determine gαβ and invert to find the metric tensor gαβ which is, in matrixform
gαβ =
−1 0 0 00 1 + pAxx pAxy 00 pAxy 1− pAxx 00 0 0 1
, (4.2.9)
where we have written p(z, t) = ei(kz−ωt). The line element defined as ds2 = gαβdxαdxβ
can now be calculated using this metric and is
ds2 = −c2dt2 + (dx2 + dy2 + dz2) + pAxx(dx2 − dy2) + 2pAxydxdy. (4.2.10)
We recognise the first two terms as the Minkowski line-element ds2M := ηαβdx
αdxβ offlat space. This verifies that our space can be thought of as a background Minkowskispacetime imbued with weak deformations due to the presence of matter and gravitationalwaves. The final two terms are the perturbations due to the presence of propagatinggravitational waves. Noting that p is actually a function of time, we see that these additionsmake the line-element time dependent. We can write this in a more enlightening form bydecomposing the wave part into its two polarisation states, h+ and h×. For the choice ofpropagation direction, we find that θ = (1, 0, 0) and φ = (0, 1, 0) and hence
h+ = Axxei(kz−ωt), h× = Axyei(kz−ωt). (4.2.11)
Alternatively we can find the polarisation states of the wave itself by finding the basis e+
and e× as in (4.1.35). In this case it is relatively simple since we can write
hαβ =
0 0 0 00 1 0 00 0 −1 00 0 0 0
Axxei(kz−ωt) +
0 0 0 00 0 1 00 1 0 00 0 0 0
Axyei(kz−ωt). (4.2.12)
From (4.1.35) we have by inspection that the independent polarisations for this wave areh+ = Axxei(kz−ωt) and h× = Axyei(kz−ωt). These are reminiscent of the two independentpolarisations of electromagnetic waves which are the linear horizontal and vertical states.However, the interpretation is different for gravitational waves and we discuss this inSection 4.3. The gravitational wave pieces of the line-element in (4.2.10) now become
ds2gw := h+(dx2 − dy2) + 2h×dxdy (4.2.13)
and we can see that each piece corresponds to the two polarisation states of the wave.
Gravitational waves from an elliptical binary
Our next example will be to examine the wave form for a binary point mass system in anelliptic orbit. The goal here will be to calculate the quadrupole moment and to examinethe polarisation states h+ and h×. We may use the solutions to the Keplerian two-bodyproblem since (4.1.26) is accurate to lowest order. These solutions show that the bodiesorbit in ellipses about their centre of mass with eccentricity e and the radial and angularcomponents are given by
r =p
1 + e cos θ, θ =
√Gm
a3
(1 + e cos θ)2
(1− e2)3/2:= k(1 + e cos θ)2, (4.2.14)
where we define k =√
Gma3
(1 − e2)−3/2 and p = a(1 − e2) and a is the semi major axis
length of the ellipse. We also note that r, θ are functions of time however this relation is
43

Chapter 4 4.2. PARTICULAR GRAVITATIONAL WAVE FIELDS
complicated and we will not need them for the ensuing computations. In calculating thequadrupole moments, we will require the following derivatives
d
dt
(1
1 + e cos θ
)=
e sin θθ
(1 + e cos θ)2= ke sin θ, (4.2.15)
d
dt
(1
(1 + e cos θ)2
)=
2e sin θθ
(1 + e cos θ)3=
2ke sin θ
1 + e cos θ, (4.2.16)
where we have made use of the time derivative of the angular coordinate in θ from (4.2.14).In the centre of mass frame, we only need to consider relative orbits because our two bodysystem has been replaced by a single body with the reduced mass µ = m1m2/(m1 +m2)orbiting about the centre of mass which we are free to set at the origin of our coordinatesystem. The coordinates of this body are now
x1(t) := x = r(t) cos θ(t), x2(t) := y = r(t) sin θ(t), x3(t) := z = 0 (4.2.17)
and so the density becomes ρ = µδ(x − x′) = µδ(x1 − x)δ(x2 − y)δ(x3) which makes thequadrupole moment a simple calculation, that is
Iab = µxaxb. (4.2.18)
Straight away we can make use of the fact that the motion occurs in a plane so that z = 0and hence Ia3 = 0 for all a = 1, 2, 3. The remaining moments are
I11 = µr2 cos2 θ = µp2 cos2 θ
(1 + e cos θ)2,
I12 = I21 = µr2 cos θ sin θ = µp2 cos θ sin θ
(1 + e cos θ)2,
I22 = µr2 sin2 θ = µp2 sin2 θ
(1 + e cos θ)2.
Taking two time derivatives which involves using θ from (4.2.14) extensively along withtrigonometric identities, we eventually arrive at
I11 = −2µp2k2[cos 2θ + e cos3 θ
]:= −2µp2k2Q11(θ), (4.2.19)
I12 = I21 = −2µp2k2[sin 2θ + e sin θ(1 + cos2 θ)
]:= −2µp2k2Q12(θ), (4.2.20)
I22 = 2µp2k2[cos 2θ + e cos θ(1 + cos2 θ) + e2
]:= 2µp2k2Q22(θ). (4.2.21)
The components of the spatial potentials in the far-away wave zone are now
hab =4G2mµ
c4Ra(1− e2)
−Q11 −Q12 0−Q12 Q22 0
0 0 0
. (4.2.22)
where R is the distance from the centre of mass of the source to the observer point (in(4.1.26) this was r) and m := m1 + m2. These potentials considerably simplify if weconsider a circular orbit where e = 0. In this case, the semi major axis length reducesto the radius of the circle a = r and θ(t) = ω(t − R/c) where ω2 = Gm/r3 is the orbitalangular frequency and is also Kepler’s third law. We must also use the retarded timeu = t−R/c. The potential now reduces to
hab(u) = −4G2
c4R
mµ
r
cos(2ωu) sin(2ωu) 0sin(2ωu) − cos(2ωu) 0
0 0 0
. (4.2.23)
44

Chapter 4 4.2. PARTICULAR GRAVITATIONAL WAVE FIELDS
From this we can see that the gravitational waves are emitted at a frequency twice that ofthe orbital frequency. Now that we have the wave form we can decompose it into its twopolarisation states using (4.1.29)-(4.1.32) (we replace θ in those definitions by ϑ to avoidconfusion with the angle of the orbits θ = θ(t)). The results of these calculations are
h+ = −2G2
c4R
mµ
r(1 + cos2 ϑ)[cos(2φ) cos(2ωu) + sin(2φ) sin(2ωu)]
= −2G2
c4R
mµ
r(1 + cos2 ϑ) cos[2(ωu− φ)], (4.2.24)
h× = −4G2
c4R
mµ
rcosϑ[− sin(2φ) cos(2ωu) + cos(2φ) sin(2ωu)]
= −4G2
c4R
mµ
rcosϑ sin[2(ωu− φ)] (4.2.25)
and we can see that in general, gravitational radiation is not isotropic, the amplitudeschange as we change our inclination ϑ. There are two special cases that we can consider,an observer perpendicular to the plane of the orbit and an observer in the plane of theorbit. In the former case, ϑ = φ = 0 so
h+ = −4G2
c4R
mµ
rcos(2ωu), (4.2.26)
h× = −4G2
c4R
mµ
rsin(2ωu). (4.2.27)
In this instance we receive both polarisation states with equal amplitude except that theyact out of phase with each other (one is a cosine, the other a sine). This can be thoughtof as circularly polarised gravitational radiation. For the latter case of detection in theplane of the orbit, ϑ = π/2, and hence
h+ = −2G2
c4R
mµ
rcos(2ωu), (4.2.28)
h× = 0. (4.2.29)
This situation is much more striking; the cross polarisation vanishes completely. Thisarises because the emitted waves must be transverse to the motions of the source sothe system would not be able to emit waves with a cross polarisation in this case. Theobserver in the plane simply sees the bodies moving back and forth so they only receiveone polarisation. We have also set φ = 0 since this simply amounts to rotating the planeof the orbit and orienting oneself along the x1 axis as in Figure 4.1. The important anglehere is the inclination ϑ.
From the (4.2.24) and (4.2.25), we can also deduce a simple fact of these waves inthis elementary case: you cannot escape their effects. No matter what angles with whichyou are oriented with respect to the binary system, the h+ polarisation will never vanish.Therefore the emission of gravitational waves is omnidirectional.
We can also rewrite these amplitudes in terms of the frequency of the gravitationalwaves fgw = ω/π, which is twice the orbital frequency using the Keplerian relation ω2r3 =Gm. We find
h+ = −2GMc
c4R(GMcπfgw)2/3 (1 + cos2 ϑ) cos(2ωu), (4.2.30)
h× = −4GMc
c4R(GMcπfgw)2/3 cosϑ sin(2ωu), (4.2.31)
where Mc := m2/5µ3/5 is known as the chirp mass. In this form we can see that the onlyway to maximise the amplitude of the wave is to increase the masses of the system whichincreases Mc or the frequency of the gravitational waves which is in turn related to theradius of the orbit.
45

Chapter 4 4.3. EFFECT OF GRAVITATIONAL WAVES ON SPACE-TIME
Figure 4.1: Geometry of a binary system orbiting in the x1 − x2 plane. The observer(field point) is at a distance R from the centre of mass of the system and is much greaterthan the distance between the bodies r. The angles ϑ, φ are the angles appearing inthe polarisation states and are dependent on the position of the field point relative to thesystem. This diagram is largely the same for an eccentric orbit
4.3 Effect of gravitational waves on space-time
Here we seek to study the effects of the potentials derived in (4.1.22)-(4.1.24) on theproper distances of space-time. To do this we require the equation of geodesic deviation,which loosely speaking, describes the variation of the components of some vector ξα whichconnects two infinitesimally close geodesics due to curvature of the space. In a Euclideanspace, our geodesics are straight lines which in this case will run parallel forever whenextended, so there is zero geodesic deviation. The equation of geodesic deviation at apoint P on one of the geodesics is
∇U∇Uξα = RαµνβUµUνξβ, (4.3.1)
where ξα is a connecting vector which begins at some point P on one geodesic and reachesover to the other, U is a tangent vector to the geodesic, ∇U is the covariant derivativealong the direction of U and Rαµνβ is the Riemann tensor we met in Section 2.1. In general,(4.3.1) can be very complicated since we have two covariant derivative operations and aRiemann tensor showing up.
Suppose we have two freely falling particles with the connecting vector ξα betweenthem. The condition of freely falling implies they travel along geodesics of the space-time. We choose a local inertial coordinate system such that at P, the origin of thevector ξ, the space is locally Minkowski space. The vector U in this context is nowthe four-momentum of the particles. Neglecting quadratic metric terms, the coordinatedistances become proper distances and since the particle separation is assumed to besmall, the components of ξα represent proper distances. The variation in the componentsof ξα is governed (4.3.1). The first derivative gives differentiation with respect to theproper time, which we label as t. The second covariant derivative gives rise to Chirstoffelsymbols but since the space is locally Minkowskian, then they all vanish at P. Hence
∇U∇Uξα = d2ξα
dt2. If we further assume the particles are moving slowly so that |U0| |Ua|,
then RαµνβUµUνξβ ≈ c2Rα00βξ
β = −c2Rα0β0ξβ and the proper time reduces to time t.
Therefore the variation in the proper distance between the particles is
d2ξa
dt2= −c2Ra0b0ξ
b. (4.3.2)
46

Chapter 4 4.3. EFFECT OF GRAVITATIONAL WAVES ON SPACE-TIME
Expanding the Riemann tensor into its corrdinate representation in terms of Christoffelsymbols and using gαβ = ηαβ − hαβ + 1
2hhηαβ, the only surviving term which is of orderr−1 is
−1
2c2
G
c4rAabTT.
Therefore (4.3.2) reduces tod2ξa
dt2=
G
2c4rAabTTξ
b, (4.3.3)
where we can see that it is the TT part of the potentials that alter proper distances in thefar-away wave zone, which is due to the change in distance between infinitesimally closegeodesics.
We can also examine the effect of the plus and cross polarisations have on the properdistance between points. We orient our axis so that the wave is propagating in the z-direction and take a slice in time and a planar slice in the z-axis. This corresponds tosetting dt = 0 and dz = 0. Our line element now reads as
ds2 = dx2 + dy2 + h+(dx2 − dy2) + 2h×dxdy. (4.3.4)
Suppose we have two freely-falling test masses in the x − y plane. The distance betweenthe masses is given by
L′ =
∫ds =
∫ 1
0
∣∣∣∣gαβ dxαdλ dxβ
dλ
∣∣∣∣1/2dλ, (4.3.5)
where we have parametrised the curve connecting the points with parameter λ. For ourmetric of (4.3.4), we have
L′ =
∫ 1
0
√x2 + y2 + h+(x2 − y2) + 2h×xy dλ, (4.3.6)
with a dot indicating differentiation with respect to λ. If the particles are oriented alonga line, then in flat space we can parametrise the straight line connecting the two particleswith x(λ) = aλ and y(λ) = bλ. The unperturbed distance between these particles isL =
√a2 + b2 and x = a, y = b. The distance between them in the presence of the
propagating wave is now
L′ =
∫ 1
0
√a2 + b2 + h+(a2 − b2) + 2abh× dλ
= L
∫ 1
0
√1 + h+
a2 − b2L2
+ 2ab
L2h× dλ (4.3.7)
≈ L+a2 − b2
2Lh+ +
ab
Lh×, (4.3.8)
where we have used the binomial approximation since |h+| 1 and |h×| 1. This canbe written in terms of the relative change in the displacement ∆L/L where ∆L := L′−Land we find
∆L
L≈ a2 − b2
2L2h+ +
ab
L2h×. (4.3.9)
Recalling that the polarisations are sinusoidally time varying, then this proper distanceis in fact time dependent and causes it to both contract and expand as the wave passes.We emphasise that the particles are still at rest; it is space itself that is changing as thewave passes. In the case of the masses aligned along the x-axis, then b = 0, a = L and∆L/L = h+/2; the same is true for alignment along the y-axis albeit with a minus sign.
47

Chapter 4 4.4. QUADRUPOLE FORMULA
For alignment at either +45 to the positive x-axis or at −45, the relative displacementis ∆L/L = ±h×/2. These calculations show that the effects of the gravitational wave canbe directly related to its polarisation.
The effects of these polarisations are striking. The time dependence of the polarisa-tions, which are proportional to cos(kz − ωt), implies that L′ becomes larger and smallerthan the unperturbed length L periodically in time with a frequency 2πω. This expansionand contraction is the characteristic defining of a gravitational wave as it interacts withmatter. The polarisation h+ induces changes only along the vertical and horizontal direc-tions but the effects of compression and expansion occur out of phase due to the minussign, that is when the horizontal is compressed the vertical expands. The same is true forthe h× polarisation except its effects are rotated π/4 relative to those of the h+. This isthe origin of the ‘plus’ and ‘cross’ names for the polarisation states. These independentmodes are demonstrated on a ring of test particles in Figure 4.2. Each state periodicallydeforms the circle into an ellipse. A linear combination of polarisations would of courseinduce a linear combination of these deformations.
More exotic arrangements can be examined by using (4.3.6) and parametrising thepaths between the particles. If we arrange many particles along a circle of radius r wehave the parametrisations x(λ) = r cos(λ) and y(λ) = r sin(λ). Inserting this into (4.3.6)and expanding the square root to quadratic order (the integral over the linear termsvanishes) we find the relative change in the radius is ∆r/r ∝ (h2
+ + h2×). For detection
purposes then, it is far better to arrange the masses co-linearly than in more complicatedarrangements such as along a circle. Indeed since ∆L ∝ L we should also displace ourmasses across great distances to amplify the effects.
Figure 4.2: The effect of a passing gravitational wave into the page on test particles atrest lying in a circle. The two modes of oscillation shown are the effects of a purely pluspolarised wave and a purely crossed polarised wave. The shape is deformed in such away that it is compressed in one direction and expanded in another orthogonal to thecompression direction.
4.4 Quadrupole formula
Now that we know the wave-field we expect in the far-away wave zone, we can ask aboutthe rate at which energy is dissipated through gravitational radiation. The results willlead us to the well-known quadrupole formula for gravitational radiation emission andfrom this we will be able to predict the effect of such emissions on the orbital motion ofthe system itself. Finally we apply these results to the case of the Hulse-Taylor binarywhich yields excellent agreement with observations.
48

Chapter 4 4.4. QUADRUPOLE FORMULA
We mentioned long ago that (2.1.11) had a connection to the conservation of mass-energy in space-time. It is now time to explore this further. The conservation equationswe had there where
∂β
[(−g)(Tαβ + tαβLL)
]= 0. (4.4.1)
In Special Relativity (SR), the metric is the flat-space Minkowksi metric which implies that(4.4.1) reduces down to the SR conservation equivalent of ∂βT
αβ = 0. In that context, itthen makes perfect sense to define a momentum four-vector for the matter in some volumeV as
PαSR[V ] :=1
c
∫VTα0d3x, (4.4.2)
along with a definition of energy as E[V ] := cP 0SR[V ]. These definitions can be motivated
to be consistent with what we expect in SR if we define T 00 = c2ρ. Then
E[V ] = c2
∫Vρ d3x = Mc2,
with M :=∫V ρ d
3x, which is of course mass-energy equivalence. We seek a generalisationof (4.4.2) that is valid in General relativity (GR). In GR, the conservation of the energy-momentum tensor is now a covariant derivative since the metric is in general differentfrom flat-Minkowski space. This conservation alone is not useful because it only takes intoaccount matter contributions and neglects energy that is stored in the gravitational fielditself. The combination we are looking for that contains the field is (4.4.1).
We define in analogy to the SR case, the four-momentum in a volume V with boundary∂V and with Tαβ = 0 on ∂V , as
Pα[V ] :=1
c
∫V
(−g)(Tα0 + t0aLL)d3x. (4.4.3)
This is similar to our definition in (3.1.22) except we here we consider a time-independentvolume (equivalent to choosing a hyper-surface where x0 =constant) so we will not needto make use of results from the calculus of moving surfaces. An ‘energy’ like componentof this four-vector is given by the zero index term and we define E[V ] := cP 0[V ], so then
E[V ] =
∫V
(−g)(T 00 + t00LL)d3x. (4.4.4)
In the limit of no gravitational field, t00LL = 0 and this reduces to the SR case. As it
stands, (4.4.4) has no physical meaning because a notion of local energy densities in GRdoes not exist. In general, this is because there is no way of splitting the metric gαβ intoa “background” and a “dynamical” part, for which we would expect changes in energy tobe found in the dynamical part, without introducing coordinate specific quantities whichis entirely counter to the covariant formulation of GR (as is discussed by Wald [27]). Morespecific to the formulation in Section 2.1, if we have all components of Tαβ vanishing atsome point, then it will vanish in all frames because it is a valid tensor. However the samecannot be said for tαβLL since it is not a tensor so in some frames it vanishes and in others
it does not. Even further we can make tαβLL vanish in flat-space Cartesian coordinates (i.e.using gαβ = ηαβ), but it will not vanish in, say, flat polar coordinates. It therefore doesnot make sense to talk of local energy densities here. We will see soon however that it infact does make physical sense to define a total mass-energy if we consider all space.
Consider taking a derivative of (4.4.3) with respect to the time-like coordinate x0.Since the integration is over the spatial coordinates, the derivative may come inside the
49

Chapter 4 4.4. QUADRUPOLE FORMULA
integral (we assume that we can indeed do this) and we can make use of (4.4.1) and theDivergence theorem to obtain
dPα
dt[V ] = −
∮∂V
(−g)(Tαc + tαcLL)dSc. (4.4.5)
However by assumption, Tαβ = 0 on this boundary, so this reduces to
dPα
dt[V ] = −
∮∂V
(−g)tαcLLdSc. (4.4.6)
Looking at the zero component of this we have
dE
dt[V ] = −c
∮∂V
(−g)t0cLLdSc. (4.4.7)
Our conserved quantity has led us to see that the rate of change of P 0[V ] is directly relatedto flux of the gravitational field represented by t0cLL. Under the assumption of asymptoticflatness which is that (−g)t0cLL (and its derivatives) will vanish in the limit as r → ∞ atleast as fast as 1/r2, 2 then we can extend the volume V to ‘all-space’ which leads us tothe total quantities
E =
∫All space
(−g)t00LLd
3x, (4.4.8)
dE
dt= −c
∮All space
(−g)t0cLLdSc. (4.4.9)
The advantages of these quantities is that under a special gauge transformation, they areboth invariant [27] which means that they have qualities of the concepts we require themto be.
For now, we define (4.4.8) as the total mass-energy in the space-time, and later we willmotivate why this is the case in terms of other definitions. Since (4.4.9) represents a fluxof gravitational energy, then the rate at which energy is emitted by gravitational waves isthe negative of this, so we write
Egw = c
∮All space
(−g)t0cLLdSc. (4.4.10)
With the potentials written in the far-away wave zone as
h00 =4GM
c2r, h0a = 0, hab = habTT, (4.4.11)
the specific Landau-Lifshitz pseudo-tensor becomes
(−g)t0cLL =c2
32πGhTTab h
abTTΩc. (4.4.12)
Substituting this into (4.4.10) and evaluating in spherical coordinates so that dSc =r2ΩcdΩ, we have
Egw =c3
32πGlimr→∞
∮r2hTT
ab habTTdΩ. (4.4.13)
2Roughly speaking, we require (−g)t0cLL = O(r−2) as r →∞ because dSc = r2ΩcdΩ so for the integralto converge, we require that the combination (−g)t0cLLdSc converges uniformly. Since t0cLL is quadratic inthe potentials, then this requires that hαβ = O(r−1) in this limit. This is fine since we saw that in thefar-field this is the leading order scaling of the potentials in (4.1.1)-(4.1.3).
50

Chapter 4 4.4. QUADRUPOLE FORMULA
In this calculation we have made use of the fact that h00 is time-independent so ∂0h00 = 0
and that we can swap between spatial derivatives and retarded time derivatives with∂b = ∂b(t − r/c)∂u = −Ωb∂u/c. We can write this in terms of the wave polarisations byusing (4.1.35) and it becomes
Egw =c3
16πGlimr→∞
∮r2(h2
+ + h2×
)dΩ. (4.4.14)
The validity of our definition in (4.4.8) as the total mass-energy is consistent with theresult derived using the more rigorous Bondi-Sachs mass loss equation [28], where we findEgw = Egw(Bondi-Sachs), where Egw is given in (4.4.14) and Egw(Bondi-Sachs) is theBondi-Sachs mass loss equation in the case of gravitational waves. [28].
To lowest order in the potentials, we saw that in the wave zone,
hab =2G
c4rIab, (4.4.15)
where this term appears in (2.5.43) and where
Iab =
∫ρxaxbd3x, (4.4.16)
is the quadrupole mass moment. Taking the TT part of hab in (4.4.15) and contractingover itself leads to (A.4.1) which is derived in appendix 3,
hTTab h
abTT =
4G2
c8r2
(δacδbd −
1
2δabδcd − δacΩbΩd − δbdΩaΩc
+1
2δabΩcΩd +
1
2δcdΩaΩb +
1
2ΩaΩbΩcΩb
)Iab(3)Icd(3). (4.4.17)
We can then insert this into (4.4.13) to arrive at the quadrupole formula for the rate ofenergy loss due to gravitational wave emission
Egw =G
5c5
(Iab(3)Iab(3) −
1
3I(3)2
), (4.4.18)
where I := δabIab. The details are contained in Theorem A.2 of Appendix A.4. We
could further write (4.4.18) in terms of STF tensors, such as I<ab>(3) however its givenform will prove more useful for calculations we shall do in the next section. The firstterm to contribute to gravitational radiation is therefore the quadrupole moment. Themonopole moment vanishes since this is related to the total mass of the system, which isheld constant. Similarly the dipole moment vanishes in the centre of mass frame as is seenin Section 2.5 which is related to conservation of linear momentum. At higher orders, wecould rightly expect the presence of current multipoles in a quadrupole radiation formulato appear. Indeed this is the case as we discuss in Section 4.6. The far-field potentials of(4.4.15) can be derived by an alternative means as is discussed by Wald [27] by consideringthe retarded integral solution and Fourier transforming in time while also making a far-field approximation. One can then use this result to derive quadrupole formula exactlythe same as in (4.4.18). If we also formulated this in terms of the dynamical time τ , wewould find
(−g)t0cLL =ε2c2
32πG˙hTTab
˙habTTΩc, (4.4.19)
and using hab(4) = ε4 2Gc4rIab, the quadrupole formula would become
˙Egw = ε10 G
5c5
(Iab(3)Iab(3) −
1
3I(3)2
). (4.4.20)
51

Chapter 4 4.5. APPLICATION TO HULSE-TAYLOR BINARY
4.5 Application to Hulse-Taylor binary
The quadrupole formula ‘derived’ in the previous section gives to lowest order, the rate atwhich energy is emitted via gravitational waves from an orbiting system. We would verymuch like to test this formula and hence the prediction of gravitational waves in generaland therefore require a suitable system. A very useful system to consider is an inspiralingcompact binary. These systems are compact in the sense that tidal forces due to the finitesize of the bodies are negligible in comparison to the effects of radiation damping on theorbits. Indeed a quick calculation [8] reveals that finite size effects should only appear inthe equations of motion at 5PN order with an error equivalent to less than one part in16,000 rotations. Typical compact objects include neutron stars, pulsars and black holes.
Another important question that arises is that the objects we consider have very stronginternal gravitational fields. Since general relativity is a non-linear theory we could expectthat there should be some contribution due to these internal fields to the external fieldsand if there is, then the post-Newtonian approximation of weak fields should not be valid.The resolution of these complications is rather simple: in GR, the internal dynamics of thegravitating objects are irrelevant for the external gravitational fields as long as they arewell separated to ignore tidal interactions. This is the strong equivalence principle (SEP)in action (some alternative theories violate SEP, such as scalar-tensor gravity). The onlytwo relevant parameters for the inter-body fields are the total mass m and any spin dueto angular momentum. This has been termed the ”effacement” principle. Despite thepost-Newtonian approximation begin valid for slow-moving, weak gravity systems it hasalso been seen to be ”unreasonably effective” [29] at describing the fast-motions and strongfields for inspiraling neutron stars and black holes.
Perhaps the greatest verification of this principle of neglecting the internal dynamicsis the remarkable agreement between observations and the theoretical predictions basedoff the quadrupole formula. The hallmark example is the PSR 1913+16 pulsar discoveredby Hulse and Taylor in 1974 [30]. It was discovered by radio pulse emissions from theactive radio pulsar and there was very likely an inert neutron star companion in orbit witha period close to 8 hours. From subsequent observations, the period has seen to decreaseat a rate of 76.5 microseconds per year with decreases in the separation as well. Thisobserved period decrease is in remarkable agreement with the GR prediction and is thusseen as an indirect observation of the existence of gravitational waves.
By consideration of the ‘effacement’ principle we approximate the neutron stars aspoint particles of mass m1 and m2 and neglect individual angular momentum. Thereforethe density becomes ρ = m1δ(x − z1) + m2δ(x − z2) and thus the quadrupole momentreduces to
Iab =
∫ρxaxbd3x = m1z
a1zb1 +m2z
a2zb2. (4.5.1)
If we convert to the Newtonian centre of mass frame (of course in special relativity, centerof mass is relative) using z := z1 − z2 as the separation vector, then to lowest order,z1 = (m2/m)z and z2 = (m1/m)z where m := m1 +m2. Then
Iab =m1m
22
m2zazb +
m2m21
m2zazb
=m1m2
m2mzazb
= ηmzazb, (4.5.2)
where we define the dimensionless reduced mass η := m1m2m2 . Inserting this quadrupole
mass moment into the quadrupole formula (A.4.3), yields (details given in appendix 3)
Egw =8
15
G
c5
(Gm)2(mη)2
z4(12v2 − 11z2), (4.5.3)
52

Chapter 4 4.5. APPLICATION TO HULSE-TAYLOR BINARY
where n = z/z is a unit vector, and z = nava is the radial velocity. Immediately we canspecialize to a quasi-circular orbit that is Newtonian so that z = 0 and v2 = Gm/z so that
Egw =32
5
η2c5
G(v/c)10.
We can see that as the energy radiated increases as the velocity of the objects becomeslarger. Therefore the emission of gravitational waves is stongest in the inpsiral phase ofthe binary. The Newtonian orbital energy is E = −Gm1m2/(2z) = −Gm2η/(2z) and ifwe suppose that energy is conserved so that the rate of decrease of the orbital energy isexactly matched by the rate at which energy is transported due to gravitational waves,then E = −Egw. This leads to the prediction that the orbital separation decreases asgravitational radiation is emitted, where the rate of decrease is given by
z = −64η
5
G3m3
c5z3. (4.5.4)
Equivalently the orbital velocity v increases along with the angular velocity ω ∝ z−3/2.We can in fact easily solve (4.5.4) to determine the separation as a function of time. If weintegrate over an intial separation R0 to an arbitrary one R while considering the start ofthe measurement as t = 0, then∫ R
R0
z3dz = −64η
5
G3m3
c5
∫ t
0dt′ (4.5.5)
and the integration yields
R(t) = R(0)
(1− 256η
5
G3m3
c5R4(0)
)1/4
= R(0)
(1− t
tc
)1/4
, (4.5.6)
where
tc =5c5R4(0)
256ηG3m3, (4.5.7)
is an in spiral time defined such that R(tc) = 0. This time is purely representative ofthe idealized case of point masses. Real inspiral times are likely to be less than this sincefinite bodies will begin to exert non-negligible tidal forces on each other when they aresufficiently close and then the quadrupole formula would be no longer valid. Nonethelessthe prediction of a time to coalesce is certainly a post-Newtonian effect. We plot in Figure4.3(a) the solution given by (4.5.6) and in Figure 4.3(b) we plot a parametric solution. Bothplots clearly indicate the presence of gradual orbital decay before a sudden inspiral phase.Newtonian theory would predict that stable orbits are infinitely stable when isolated whilewe see here that this is not the case any more. However we expect for ‘Newtonian’ systemsthat this time should be extremely large and indeed for the Sun-Earth system, this timeis on the order of 1023 years or approximately 1013 times the age of the universe. Clearlythe emission of gravitational waves in this system is completely negligible for everydayapplications, such as satellite positioning.
The solution to the Keplerian two-body problem shows that the orbits are planarellipses with an eccentricity e and obey
r =a(1− e2)
1 + e cos θ, (4.5.8)
where a is the length of the semi-major axis. Further the rate of change of the angularcoordinate is given by
θ =
√Gm
a3
(1 + e cos θ)2
(1− e2)3/2, (4.5.9)
53

Chapter 4 4.5. APPLICATION TO HULSE-TAYLOR BINARY
(a) Radial plot (b) Parametric plot
Figure 4.3: Plots of the orbital separation in the relative frame for a quasi-circular orbit.The orbits slowly decay before a inspiral phase at times close to tc.
which is due to the conservation of angular momentum of the system. We also definem := m1 +m2 as the sum of the individual masses. Taking the derivative of (4.5.8) withrespect to time and using (4.5.9) yields
r2 =Gme2 sin2 θ
a(1− e2). (4.5.10)
In the case of a quasi-Keplerian orbit where the rate of decrease in the separation betweenthe bodies is small in comparison to the period of the orbits, we can use the Keplerianexpressions in the quadrupole formula. The total velocity of the centre of mass is thengiven in polar coordinates as v2 = r2 + r2θ2 and z = r. Substituting we find
Egw =8
15
G
c5
(Gm)2(mη)2
z4(r2 + 12r2θ2) (4.5.11)
and substituting in (4.5.8)-(4.5.10), gives
Egw =8
15
G
c5
(Gm)3(mη)2
a5(1− e2)5(1 + e cos θ)4
[e2 sin2 θ + 12(1 + e cos θ)2
]. (4.5.12)
As it stands, (4.5.12) is an intractable quantity for physical measurement, so we averageit over a period of the orbit. The Keplerian period is
T =2πa3/2
G1/2m1/2, (4.5.13)
which can be obtained by integrating the reciprocal of (4.5.9) from zero to 2π. Hence theaverage over the period is
〈Egw〉 =1
T
∫ T
0Egwdt
=1
T
∫ 2π
0
Egw
θdθ
=G1/2m1/2
2πa3/2
√a3
Gm(1− e2)
32
8
15
G
c5
(Gm)3(mη)2
a5(1− e2)5
∫ 2π
0(1 + e cos θ)2
[e2 sin2 θ + 12(1 + e cos θ)2
]dθ.
54

Chapter 4 4.5. APPLICATION TO HULSE-TAYLOR BINARY
The integral can be evaluated with the result∫ 2π
0(1 + e cos θ)2
[e2 sin2 θ + 12(1 + e cos θ)2
]dθ = 24π
(1 +
73
24e2 +
37
96e4
)and hence the averaged energy loss rate for the binary system is
〈Egw〉 =32
5
G4
c5
m5η2
a5f(e), (4.5.14)
where
f(e) =1
(1− e2)7/2
(1 +
73
24e2 +
37
96e4
), (4.5.15)
is known as the enhancement factor since f(e) ≥ 1 for elliptic orbits with the minimum fora circular orbit. Due to the Keplerian motion we have a relationship between the energyand the semi-major axis which is E = −(Gηm2)/(2a), therefore the period is proportionalto the energy by T = (constant)× (−E)−3/2. Therefore we have the relation
T
T= −3
2
E
E.
The rate at which the energy decreases is equal to the rate at which energy is removed dueto gravitational waves so E = −Egw and hence over one period, the period itself decreasesat a rate predicted by
T = −192π
5
G5/3
c5m5/3η
(2π
T
)5/3
. (4.5.16)
For the Hulse-Taylor binary, the masses of each object are known from other means andthe eccentricty and period are also known [31], they are
e = 0.6171,
mpulsar = 1.44M,
mcompanion = 1.39M,
T = 27907 s,
along with the constants and the mass of the sun
G = 6.674× 10−11 m3kgs−2,
c = 2.9979× 108 ms−1,
M = 1.989× 1030 kg.
Plugging these directly into (4.5.16), we find a rate of decrease of
T = −2.40× 10−12 s/s,
which is in excellent agreement with the observed value [32] of
T = −(2.427± 0.026)× 10−12 s/s.
This success of general relativity is seen as indirect evidence for the existence of gravita-tional waves. To achieve higher orders of precision requires formulae that go beyond the1PN order of the quadrupole formula and are discussed in the next section.
55

Chapter 4 4.6. BEYOND THE QUADRUPOLE FORMULA
4.6 Beyond the Quadrupole formula
Even though the quadrupole formula yields excellent agreement in the case of the Hulse-Taylor binary, more accurate equations are required for use as templates in acquiring thereal gravitational wave signals from noisy data. Initially, higher order PN expansions ofthe quadrupole formula were only of academic interest. However with the need for highorder waveform templates for the analysis of gravitational wave data at detectors such asLIGO, these expressions have become a key priority. At higher orders, the energy fluxtakes on different terms related to the increased complexity of the iterations. For instance,Blanchet [8] has derived an equivalent quadrupole formula accurate to the much higher3.5PN order. The energy flux is split into three parts
Egw = Einst + Etail + Etail-tail, (4.6.1)
where Einst is created only by the multipole moments and has the form
Einst =G
c5
1
5I
(3)〈ij〉
1
5I
(3)〈ij〉 +
1
c2
[1
189I
(4)〈ijk〉I
(4)〈ijk〉 +
16
45J
(3)〈ij〉J
(3)〈ij〉
]+
1
c4
[1
9072I
(5)〈ijkm〉I
(5)〈ijkm〉 +
1
84J
(4)〈ijk〉J
(4)〈ijk〉
]+
1
c6
[1
594000I
(6)〈ijklm〉I
(6)〈ijklm〉 +
4
14175J
(5)〈ijkl〉J
(5)〈ijkl〉
]+O
(1
c8
), (4.6.2)
where repeated indices are assumed to be summed over; they are placed as subscripts so tomake it easier to read. We can make a few observations for this portion of the energy flux.The first term is the lowest order quadrupole formula of (4.4.18), with the subsequentterms grouped into higher PN orders. The mass and current moments I and J are writtenin terms of STF tensors. We expect the presence of these higher order moments simplybecause they will not in general vanish as we do not have any conservation equationsleft to make use of. We also note that each successive PN order requires higher ordermoments and further differentiations. The tail terms Etail and Etail-tail are due to the wavezone contribution of the potentials and involve integrals of logarithmic terms. Applyingto circular orbits allows the tail integrals to be evaluated and (4.6.2) to be simplified. Theresult which is the culmination of a real tour de force is
Egw =32c5
5Gη2x5
1 +
(−1247
336− 35
12η
)x+ 4πx3/2
+
(−44711
9072+
9271
504η +
65
18η2
)x2 +
(−8191
672− 583
24η
)πx5/2
+
[6643739519
69854400+
16
3π2 − 1712
105γE −
856
105ln(16x) +
(−134543
776+
41
48π2
)η − 94403
3024η2 − 775
324η3
]x3
+
(−16285
504+
214745
1728η +
193385
3024η2
)πx7/2 +O
(1
c8
), (4.6.3)
where the first term is a disguised version of (4.5.14) with e = 0 and γE is the Euler-Mascheroni constant. The post-Newtonian expansion parameter here is instead the di-mensionless quantity
x :=
(Gmω
c3
)2/3
, (4.6.4)
which is much more useful than say v/c since it is related to the orbital frequency ωwhich is directly measurable and is not coordinate specific (gauge invariant) unlike v/c.Counting of PN orders is simple for example after factorising the common x5 term in
56

Chapter 4 4.6. BEYOND THE QUADRUPOLE FORMULA
(4.6.3), the bracketed entries have PN orders directly equal to the power of x appearing.It is interesting to note that there is no 1
2PN contribution to the radiated energy. Eventhough the waveform does contain a term at this order it vanishes due to destructiveinterference with the ‘Newtonian’ waveform term. The other remaining half integer termsin x (e.g. 3/2, 5/2 and 7/2) are known as wave-propagation corrections since they appearas a result of interactions between the integer order waveforms and tail terms. Remarkablythe averaged energy over an obit can be computed for eccentric binaries and are higherorder analogues of (4.5.14). It can be written as
〈Egw〉 =32c5
5Gη2x5
(P0 + P1x+ P3/2x
3/2 + P2x2 + P5/2x
5/2 + P3x3), (4.6.5)
where each Pi is a function of the dimensionless mass η and so called time eccentricityterms et which to lowest order are (actual calculation requires an extra order higher)√
1− e2 where e is the ordinary orbital eccentricity. The lowest order term P0 = f(et),where f is the enhancement factor from (4.5.15). Therefore these terms can be thoughtof as enhancement factors to the Keplerian orbit.
57

Chapter 5
Concluding Remarks
We will first proceed with a brief summary of the content contained within. We introducedthe reduced field equations of GR and we then found that they were brilliantly suited forthe implementation of a post-Newtonian approximation scheme. This involved defining εas some small parameter to quantify the slowness of the system and we made use of thisto write expansions about this parameter. We then obtained the first and second orderequations from these considerations and showed that the first order yielded the Newtonianlimit and the second order corresponded to the first post-Newtonian contribution. We thenapplied these equations to the case of a system of point particles and found the metric inthis case and the equations of motion. As a verification of these results, we obtained awell known formula for the perihelion precession of a binary system.
In the second half we were concerned about the prediction of gravitational wave phe-nomena; ripples in space-time. By utilising gauge freedom we could place these the leadingorder potentials in such a way that the wave was transverse and trace-free. We then ap-plied these results to the case of waves in vacuum and to the elliptical binary systemand examined the polarisation states. We then found that it is in fact these polarisationstates that correspond to physical observables and it is the change in distances betweengeodesics that is observed of a passing gravitational wave. With all of the previous results,we could discuss the tricky concept of energy in GR and finally arrived at the quadrupoleformula for gravitational wave emission. The validity of this formula was then tested onthe binary pulsar PSR1913+16. The prediction was astoundingly accurate even to thelowest order which is the quadrupole formula and it is indirect evidence for the existenceof gravitational radiation. The concepts covered within would form a great introductioninto applications of GR such as to the post-Newtonian approximations and to the theoryof gravitational waves and would form a firm basis for more advanced study.
Perhaps the most important test of GR will be the detection of gravitational waves.Since Joseph Weber created the first gravitational wave detector in 1959 [33] and showedthat it may be possible to detect them, detectors have sprung up all over the world.The most recent of these are the highly sensitive interferometers such as LIGO in theUS and VIRGO in Italy which are due to be improved into the advanced LIGO andVIRGO detectors which will be able to detect wave amplitudes of ∼ 10−22 [34]. Whileno positive detections have been made yet, detection is becoming more and more likely aspeak sensitivities increase.
The most important application of the post-Newtonian expansions is, as we have men-tioned previously, obtaining high accuracy wave-templates for data analysis. While havesaid that high accuracy such as to the 3.5PN order is essential for reducing systematicerrors between the observed data and the theoretical templates, it is important to see themagnitude of these corrections. In Figure 5.1 we show estimates for the contributions eachPN order makes for the accumulated gravitational wave cycles measured by a detector like
58

Chapter 5
LIGO or VIRGO. We can see that for high mass binaries, the first PN order contributionis about 10% of the Newtonian order which would be found using the quadrupole formula(although the tail contributions go some way towards lowering the instantaneous contribu-tions). Although they may look small, the higher contributions such as 3PN are requireddue to the extreme levels of sensitivity needed in the measurements. To declare a positivedetection would require all sources of noise to be accounted for, of which there are many,and these higher order contributions help to rule out false signals. Obtaining higher ordercorrections say to 4PN is an eventual goal for the post-Newtonian approximation aimed atobtaining more accurate waveforms. The main difficulty here is the number of terms onedeals with goes through the roof, so to speak, and it is an extreme challenge to carry outsuch calculations. It is possible that there may be an as yet introduced scheme which isable to obtain higher order contributions more easily. Regardless of whether one can ob-tain these or not, it is in the hands of the detectors to find direct evidence of gravitationalwaves and verify these theories.
Figure 5.1: Representative magnitude estimates for the corrections gained over manygravitational wave cycles with each PN contribution. These are given for three differentbinary systems that would be detectable in the frequnency band of LIGO and VIRGO(Reproduced from [35]).
59
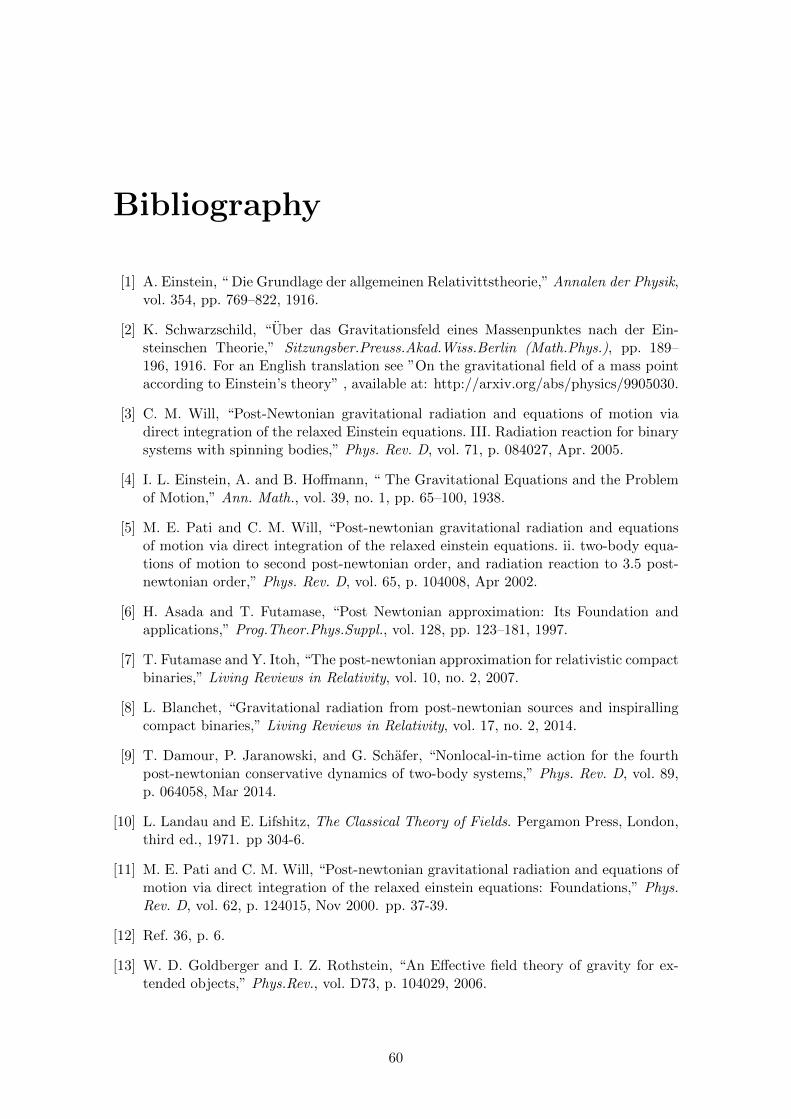
Bibliography
[1] A. Einstein, “ Die Grundlage der allgemeinen Relativittstheorie,” Annalen der Physik,vol. 354, pp. 769–822, 1916.
[2] K. Schwarzschild, “Uber das Gravitationsfeld eines Massenpunktes nach der Ein-steinschen Theorie,” Sitzungsber.Preuss.Akad.Wiss.Berlin (Math.Phys.), pp. 189–196, 1916. For an English translation see ”On the gravitational field of a mass pointaccording to Einstein’s theory” , available at: http://arxiv.org/abs/physics/9905030.
[3] C. M. Will, “Post-Newtonian gravitational radiation and equations of motion viadirect integration of the relaxed Einstein equations. III. Radiation reaction for binarysystems with spinning bodies,” Phys. Rev. D, vol. 71, p. 084027, Apr. 2005.
[4] I. L. Einstein, A. and B. Hoffmann, “ The Gravitational Equations and the Problemof Motion,” Ann. Math., vol. 39, no. 1, pp. 65–100, 1938.
[5] M. E. Pati and C. M. Will, “Post-newtonian gravitational radiation and equationsof motion via direct integration of the relaxed einstein equations. ii. two-body equa-tions of motion to second post-newtonian order, and radiation reaction to 3.5 post-newtonian order,” Phys. Rev. D, vol. 65, p. 104008, Apr 2002.
[6] H. Asada and T. Futamase, “Post Newtonian approximation: Its Foundation andapplications,” Prog.Theor.Phys.Suppl., vol. 128, pp. 123–181, 1997.
[7] T. Futamase and Y. Itoh, “The post-newtonian approximation for relativistic compactbinaries,” Living Reviews in Relativity, vol. 10, no. 2, 2007.
[8] L. Blanchet, “Gravitational radiation from post-newtonian sources and inspirallingcompact binaries,” Living Reviews in Relativity, vol. 17, no. 2, 2014.
[9] T. Damour, P. Jaranowski, and G. Schafer, “Nonlocal-in-time action for the fourthpost-newtonian conservative dynamics of two-body systems,” Phys. Rev. D, vol. 89,p. 064058, Mar 2014.
[10] L. Landau and E. Lifshitz, The Classical Theory of Fields. Pergamon Press, London,third ed., 1971. pp 304-6.
[11] M. E. Pati and C. M. Will, “Post-newtonian gravitational radiation and equations ofmotion via direct integration of the relaxed einstein equations: Foundations,” Phys.Rev. D, vol. 62, p. 124015, Nov 2000. pp. 37-39.
[12] Ref. 36, p. 6.
[13] W. D. Goldberger and I. Z. Rothstein, “An Effective field theory of gravity for ex-tended objects,” Phys.Rev., vol. D73, p. 104029, 2006.
60

Chapter 5 BIBLIOGRAPHY
[14] L. Blanchet and T. Damour, “Radiative gravitational fields in general relativity. I -General structure of the field outside the source,” Royal Society of London Philosoph-ical Transactions Series A, vol. 320, pp. 379–430, Dec. 1986.
[15] L. Blanchet and T. Damour, “Tail-transported temporal correlations in the dynamicsof a gravitating system,” Phys. Rev. D, vol. 37, pp. 1410–1435, Mar 1988.
[16] L. Blanchet and T. Damour, “Post-newtonian generation of gravitational waves,”Ann. Inst. Henri Poincare A, vol. 50, pp. 377–408, 1989.
[17] T. Damour and B. R. Iyer, “Post-newtonian generation of gravitational waves. ii. thespin moments,” Ann. Inst. Henri Poincare A, vol. 54, pp. 115–164, 1991.
[18] C. M. Will and A. G. Wiseman, “Gravitational radiation from compact binary sys-tems: Gravitational waveforms and energy loss to second post-newtonian order,”Phys. Rev. D, vol. 54, pp. 4813–4848, Oct 1996.
[19] T. Futamase and B. F. Schutz, “Newtonian and post-newtonian approximations areasymptotic to general relativity,” Phys. Rev. D, vol. 28, pp. 2363–2372, Nov 1983.
[20] P. Jaranowski and G. Schafer, “Third post-newtonian higher order adm hamiltondynamics for two-body point-mass systems,” Phys. Rev. D, vol. 57, pp. 7274–7291,Jun 1998.
[21] G. M. Clemence, “The relativity effect in planetary motions,” Rev. Mod. Phys.,vol. 19, pp. 361–364, Oct 1947.
[22] U. J. L. Verrier, “Theorie du mouvement de mercure,” Annales de l’Observatoirlmpirial de Paris., vol. 76, 1859.
[23] A. Einstein, “The foundation of the general theory of relativity,” Reprint of the 1916paper in The Principle of Relativity, New York, Dover Publications Inc., pp 109-164,1923.
[24] Ref. 10, p. 287-290.
[25] D. Tong, “Classical dynamics.” University Lecture,http://www.damtp.cam.ac.uk/user/tong/dynamics/clas.pdf, 2012. see p. 123.
[26] D. N. Damour, T., “General relativistic celestial mechanics of binary systems. i. thepost-newtonian motion,” Ann. Inst. H. Poincar Phys. Thor, vol. 43, no. 1, pp. 107–132, 1985. p. 117.
[27] R. M. Wald, General Relativity. The University of Chicago Press, Chicago, 1984. seepp. 84-88 and section 11.2, pp. 285-295.
[28] H. Bondi, M. G. J. van der Burg, and A. W. K. Metzner, “Gravitational Waves inGeneral Relativity. VII. Waves from Axi-Symmetric Isolated Systems,” Royal Societyof London Proceedings Series A, vol. 269, pp. 21–52, Aug. 1962.
[29] C. M. Will, “Inaugural Article: On the unreasonable effectiveness of the post-Newtonian approximation in gravitational physics,” Proceedings of the NationalAcademy of Science, vol. 108, pp. 5938–5945, Apr. 2011.
[30] R. A. Hulse and J. H. Taylor, “Discovery of a pulsar in a binary system.,” TheAstrophysical Journal Letters, vol. 195, pp. L51–L53, 1975.
61

Chapter BIBLIOGRAPHY
[31] J. M. Weisberg and J. H. Taylor, “The Relativistic Binary Pulsar B1913+16: ThirtyYears of Observations and Analysis,” in Binary Radio Pulsars (F. A. Rasio and I. H.Stairs, eds.), vol. 328 of Astronomical Society of the Pacific Conference Series, p. 25,July 2005.
[32] J. M. Weisberg, D. J. Nice, and J. H. Taylor, “Timing Measurements of the Rela-tivistic Binary Pulsar PSR B1913+16,” The Astrophysical Journal Letters, vol. 722,pp. 1030–1034, Oct. 2010.
[33] J. Weber, “Detection and generation of gravitational waves,” Phys. Rev., vol. 117,pp. 306–313, Jan 1960.
[34] G. M. Harry and the LIGO Scientific Collaboration, “Advanced ligo: the next gener-ation of gravitational wave detectors,” Classical and Quantum Gravity, vol. 27, no. 8,p. 084006, 2010.
[35] Ref. 8, p. 121.
[36] E. Poisson, “Post-newtonian theory for the common reader.” University Lecture,http://www.physics.uoguelph.ca/poisson/research/postN.pdf, 2007.
62

Appendix A
Appendix
A.1 Solving the Wave Equation
As we have seen, finding solutions to the wave equation is a central mathematical prob-lem in post-Newtonian theory. Therefore we collect here a method of integrating theinhomogeneous wave equation
ψ = −4πµ(ct, x), (A.1.1)
by means of a Green’s function. Here φ(ct,x) is our scalar potential which is generatedby the source term µ(x) and x = (ct,x). A Green’s function for the d’Alembertian shouldsatisfy
G(x, x′) = −4πδ(ct− ct′)δ(x− x′), (A.1.2)
with G = 0 if x is in the past light cone generated at the source point x′. The Green’sfunction we are looking for is
G(x, x′) =δ(c(t− t′)− |x− x′|)
|x− x′|. (A.1.3)
So our potential is, by the definition of a Green’s function,
ψ(x) =
∫ ∞−∞
∫ t
0G(x, x′)µ(x′)d(ct′)d3x′, (A.1.4)
where the spatial integrations run over all space. Substituting into this (A.1.3) we obtain
ψ(ct,x) =
∫ ∞−∞
∫ t
0
δ(c(t− t′)− |x− x′|)|x− x′|
µ(ct′, x′)d(ct′)d3x′. (A.1.5)
We may now proceed with the temporal integration yielding
ψ(ct,x) =
∫ µ(ct−|x−x′|,x′)|x−x′| d3x′ : |x− x′| ≤ ct
0 : otherwise
and hence
ψ(ct,x) =
∫L(ct,x)
µ(ct− |x− x′|,x′)|x− x′|
d3x′, (A.1.6)
where the integration is performed over the domain L(ct, x) := 0 ≤ |x− x′| ≤ ct whichis a ball centred at x with radius ct. This is the retarded integral solution to the waveequation of (A.1.1), so called because the solution at the field point depends on the valuesof the source µ at the retarded time tr := t− |x− x′|/c. This is a simple consequence ofthe finite speed of propagation of information, c. There also exists an advanced Green’s
63

Chapter A A.2. ANGULAR STF TENSORS AND SPHERICAL AVERAGES
function which solves the wave equation with integration region being the future light-cone,however this is taken as non-physical due to violations of causality.
There is also a homogeneous solution that is to be added (A.1.6). We label it as ψHand it is the unique solution to ψH = 0, where appropriate initial data is given by, sayat time t = 0, ψH(0, x) and ∂(ct)ψH(0, x) which are smooth functions. The solution to thisis given by Kirchoff’s equation
ψH(ct, x) =1
4π
∫∂L(ct,x)
[∂
∂ρ(ρψH(ct′, x)) +
∂
∂(ct′)(ρψH(ct′, x))
] ∣∣∣∣t=0, ρ=r
dΩ, (A.1.7)
where ρ := |x−x′| and dΩ := sin(θ)dθdφ in spherical coordinates. The region of integrationis now the surface of the past light cone of the field point (ct, x). The full solution to thewave equation of (A.1.1) is then
ψ = ψH +
∫L(ct,x)
µ(ct− |x− x′|,x′)|x− x′|
d3x′. (A.1.8)
A.2 Angular STF Tensors and Spherical Averages
Due to the presence of a retarded time in our integrals, it will sometimes be necessaryto take spatial derivatives of the intergrands. Since the time component is dependenton source positions, spatial derivatives must take this into account. Typical derivativesinclude ∂ar where r := |x| and spherical coordinates are implied. In order to proceed withthose calculations we define the angular vector
Ω :=x
r= (cosφ sin θ, sinφ sin θ, cos θ), ⇒ rΩa = xa, (A.2.1)
which satisfies the following identities
δabΩaΩb = 1, (A.2.2)
∂ar = Ωa, (A.2.3)
∂aΩb =1
r(δab − ΩaΩb), (A.2.4)
∂ar−1 = −r−2Ωa, (A.2.5)
where Ωa := δabΩb. We will verify each of these. Beginning with (A.2.2), we have
δabΩaΩb = (Ω1)2 + (Ω2)2 + (Ω3)2 = 1,
using the definition of the components given in (A.2.1). In order to derive (A.2.3), weconsider taking the spatial derivative of (A.2.1), with the left hand side as
∂a(rΩb) = (∂ar)Ω
b + r∂aΩb
= (∂ar)Ωb
and the right hand side trivially as ∂axb = δba, thus putting it together we have
(∂ar)Ωb = δba.
Multiplying both sides by Ωb and making use of δbaΩb = Ωa and (A.2.2), we arrive at(A.2.3). Use of the chain rule and of (A.2.3) will yeild (A.2.5). For the third identity we
64

Chapter A A.3. EVALUATION OF A 1PN SURFACE INTEGRAL
use the definition (A.2.1), that is
∂aΩb = ∂a
(xbr
)= ∂a (xb) r
−1 + xb∂ar−1
= δabr−1 − r−1xbΩar
−1
=1
r(δab − ΩaΩb).
We next introduce the concept of symmetric trace-free tensors which are written, forexample, as Ω〈abc〉 and correspond to products of the angular tensors Ωa in such way thatthey are symmetric and their trace vanishes. For example,
Ω〈ab〉 := ΩaΩb − 1
3δab,
Ω〈abc〉 := ΩaΩbΩc − 1
5(δabΩc + δacΩb + δbcΩa).
They are trace free since δabΩ〈abc〉 = δacΩ
〈abc〉 = δbcΩ〈abc〉 = 0. Finally, we introduce the
notion of a spherical average of a function ψ, which is defined as
〈〈ψ〉〉 :=1
4π
∫ψ(θ, φ) dΩ, (A.2.6)
where dΩ = sin θ dθ dφ is an element of solid angle. We present here a few identitiesrelated to this definition that are simply imported into the derivation of the Quadrupoleapproximation. Using the fact that the angular average of an STF tensor is zero, allowsone to immediately write
〈〈Ωa〉〉 = 0, (A.2.7)
〈〈ΩaΩb〉〉 =1
3δab, (A.2.8)
〈〈ΩaΩbΩc〉〉 = 0, (A.2.9)
〈〈ΩaΩbΩcΩd〉〉 =1
15(δabδcd + δacδbd + δadδbc). (A.2.10)
A.3 Evaluation of a 1PN surface integral
In this section our goal is to evaluate the integral∮∂Nε
∂dχcdxaxb dSc. (A.3.1)
We first need to calculate ∂dχcd where we recall from (2.5.42), we have
χab = ε4GM
4πr4
(ΩaΩb − δab/2
)+O(ε6). (A.3.2)
To evaluate the derivative we require (A.2.2)-(A.2.5). We first find
∂d(ΩcΩdr−4) = ∂d(Ω
c)Ωdr−4 + ΩcΩd∂dr−4
= r−5(δcd − ΩdΩc)Ωd − 4r−5ΩdΩ
dΩc
= −4r−5Ωc.
65

Chapter A A.4. DETAILS OF QUADRUPOLE FORMULA DERIVATION
Therefore
∂dχcd = ε4
GM
4πr5(−4Ωc + 2Ωdδ
cd)
= −ε4 2GM
4πr5Ωc.
We now use dSc = R2ΩcdΩ, xa = rΩa and that at the surface r = R to obtain∮∂Nε
∂dχcdxaxb dSc = −2ε4GM
1
4π
∮∂Nε
R2
R5ΩcΩaΩbR2ΩcdΩ
= −ε4 2GM
R1
4π
∮∂Nε
ΩaΩbdΩ
= −ε4 2GM
R〈〈ΩaΩb〉〉
= −ε4 2GM
3Rδab.
The general ideas in this evaluation can be readily applied to other surface integrals of asimilar type.
A.4 Details of Quadrupole formula derivation
In this appendix, we present a few useful identities related to the derivation of thequadrupole formula that are simply inserted into the relevant sections of the text.
Lemma A.4.1. For the lowest order far-away wave zone contribution hab = 2Gc4rIab we
have the identity
hTTab h
abTT =
4G2
c8r2
(δacδbd −
1
2δabδcd − δacΩbΩd − δbdΩaΩc
+1
2δabΩcΩd +
1
2δcdΩaΩb +
1
2ΩaΩbΩcΩb
)Iab(3)Icd(3), (A.4.1)
where (3) stands for the third derivative with respect to the retarded time u = t− r/c.
Proof. We recall the definition of the TT and projection operators:
AabTT = (TT)abcdAcd,
(TT)abcd := P ac Pbd −
1
2P abPcd,
P ab := δab − ΩaΩb,
and the identities P caPab = P cb and P aa = 2 and as a consequence of these P abPab = 2 along
with P abPcb = P ab . The latter two are obtained by simply raising and lowering indices ofthe first two using the Minkowski metric ηab. We first require the following identity,
hTTab h
abTT = (TT)abcd(TT)efab hef h
cd
=
(P ac P
bd −
1
2P abPcd
)(P eaP
fb −
1
2P efPab
)hef h
cd
=
(P ac P
bdP
eaP
fb −
1
2P abPcdP
eaP
fb −
1
2P efPabP
ac P
b +1
4P abPcdP
efPab
)hef h
cd
=
(P ec P
fd −
1
2PcdP
ef − 1
2PcdP
ef +1
2PcdP
ef
)ηeaηfbh
abhcd
=
(PacPbd −
1
2PcdPab
)habhcd,
66

Chapter A A.4. DETAILS OF QUADRUPOLE FORMULA DERIVATION
where we have made use of the above identities many times. Now inserting the definitionof the projection operator Pab := δab − ΩaΩb into each term and expanding while alsosubstituting hab = 2G
c4rIab, we arrive at the required result.
Theorem A.4.2 (Quadrupole formula). Inserting (4.4.17) into
Egw =c3
32πGlimr→∞
∮r2hTT
ab habTTdΩ, (A.4.2)
yields the quadrupole formula
Egw =G
5c5
(Iab(3)Iab(3) −
1
3I(3)2
), (A.4.3)
where I := δabIab and Iab =
∫ρxaxbd3x.
Proof. The calculations here are not the most instructive but they do make use of a lotof the machinery we have taken care to develop with a key reason being the derivation ofthis result. The angular integrals that will appear have already been given in (A.2.8) and(A.2.10) and we simply insert those results. To begin we substitute (4.4.17) into (4.4.13)and start the process
Egw =G
2c5
[δacδbd −
1
2δabδcd − δac〈〈ΩbΩd〉〉 − δbd〈〈ΩaΩc〉〉
+1
2δab〈〈ΩcΩd〉〉+
1
2δcd〈〈ΩaΩb〉〉+
1
2〈〈ΩaΩbΩcΩd〉〉
]Iab(3)Icd(3)
=G
10c5
[11
6δacδbd −
2
3δabδcd +
1
6δadδbc
]Iab(3)Icd(3)
=G
10c5
[11
6Iab(3)Iab(3) −
2
3I(3)2 +
1
6Iab(3)Iab(3)
]=
G
5c5
(Iab(3)Iab(3) −
1
3I(3)2
).
Lemma A.4.3. For a two body system, with Iab = mηzazb in the centre of mass frame,the rate of energy loss due to gravitational waves emitted, in the far-away wave zone is
Egw =8
15
G
c5
(Gm)2(mη)2
z4(12v2 − 11z2). (A.4.4)
Proof. We first note that we are working in the post-Newtonian limit where the orbitalvelocities of the bodies are much smaller than the speed of light. Since the quadrupoleformula is of 1PN order, we can use the Newtonian equations of motion. If we had aformula for Egw which was accurate to say 2PN order, we would have to use the 1PNequations of motion. This follows from the iterative solution method discussed in Section2.2. In light of this, the Newtonian acceleration is given by aa = za = −(Gm/z2)na wheren = z/z is a unit vector, and z = nava. To begin we have to find an expression for thethird derivative of the mass moment Iab. These derivatives are
Iab = mηzazb,
Iab(1) = mη[zazb + zbza],
Iab(2) = mη[zazb + 2zaza + zbza],
Iab(3) = mη[...z azb + 3zazb + 3zbza +
...z bza]
= mη
[−3Gm
z2(zanb + zbna) +
...z azb +
...z bza
].
67

Chapter A A.4. DETAILS OF QUADRUPOLE FORMULA DERIVATION
For the third derivative terms we use
...z a = aa = −Gm ∂
∂u
(za
z3
)= −Gm
(za
z3− 3zza
z4
)and hence
...z azb +
...z bza = −Gm
(zazb
z3− 3zzazb
z4+zbza
z3− 3zzbza
z4
)= −Gm
z2
(zanb + zbna − 6znanb
).
Therefore
Iab(3) =2Gm2η
z2
[−2(vanb + vbna)− 3znanb
]. (A.4.5)
We now calculate the product Iab(3)Iab(3) using (A.4.5), i.e.
Iab(3)Iab(3) =4(Gm)2(mη)2
z4
[−2(vanb + vbna)− 3znanb
][−2(vanb + vbna)− 3znanb]
=4(Gm)2(mη)2
z4
[9z2nanbnanb − 12znanb(v
anb + navb) + 4(vanb + navb)(vanb + navb)]
=4(Gm)2(mη)2
z4
[9z2 − 24z2 + 8z2 + 8v2
]=
4(Gm)2(mη)2
z4
[8v2 − 7z2
],
where we repeatedly made use of n.n = 1 (unit vector) and z = nava. The trace term isdefined as I(3) := δabI
ab(3) so
I(3) =2Gm2η
z2
[−2(δabv
anb + δabvbna)− 3zδabn
anb]
=2Gm2η
z2[3z − 4z]
=−2Gm2η
z2z
and hence I(3)2 = 4(Gm)2(mη)2z2/z4. So putting it all together we find
Egw =G
5c5
4(Gm)2(mη)2
z4
[8v2 − 7z2
]− 4(Gm)2(mη)2
3z4z2
=
8
15
G
c5
(Gm)2(mη)2
z4(12v2 − 11z2),
after some simplification.
68