comparative analysis of winch-based wave energy converters1112529/fulltext01.pdf · comparative...
TRANSCRIPT

1
Comparative analysis of winch-based
wave energy converters
Aleksandar Nachev
Bachelor Thesis MMK 2017:04 MKNB 090
KTH Industrial engineering and management
Machine Design SE-100 44 STOCKHOLM

2
3
Acknowledgments
I would like to thank my supervisors, Dr Richard Neilson and Dr. Ulf Sellgren,
for their advice and support.
I would like to thank the Dr. Panagiotis Kechagiopoulos and the Erasmus teams
in the University of Aberdeen, UK, and the Royal Institute of Technology, Sweden, for
their technical support during my time abroad and the preparations beforehand.
4
BachelorThesis MMK 2017:504 MKNB 090
Comparative analysis of winch-based wave energy converters
Alexandar Nachev
Approved
2016-04-20
Examiner
Ulf Sellgren
Supervisor
Ulf Sellgren
Commissioner
KTH Machine Design
Contact person
Ulf Sellgren
Abstract
Renewable energy sources are probably the future of the mankind. The main
points advocating wave energy in particular include its huge potential, low
environmental impact and availability around the globe. In order to harvest that energy,
however, engineers have to overcome, among others, the corrosive sea environment and
the unpredictable storms as well as secure funding for research and development. A lot
of effort has been put into building and testing WECs after the oil crisis in the 1970s
and is now being used as a starting point to create the modern alternatives to fossil fuels.
The purpose of this thesis is to analyze the available winch-based wave energy
converters (WECs) in comparison with other devices of similar scale, such as linear and
hydraulic point absorber WECs. First, an introduction to the physics and geography of
waves is presented, covering wave formation and particle motion. Then a number of
designs, their working principles and history are described – oscillating water columns,
floating or bottom-fixed devices using translational or rotational motion. Environmental
and economic effects in the long term have to be taken into account. Narrowing down to
point absorbers, different power take-off systems are available – linear, hydraulic or
winch-based, each of them with specific advantages and disadvantages. Focusing on
winch-based systems, three different concepts are described – the counter weight, the
counter buoy and the Lifesaver devices. A set of comparison criteria, covering
technical, economic and environmental aspects of the device performance, is prepared.
Using this set, the three concepts are compared and results are analyzed.
Keywords: winch, PTO, wave, energy

5
Examensarbete MMK 2017:04 MKNB 090
Jämförande analys av vinschbaserade vågenergikonverterare
Aleksandar Nachev
Godkänt
2017-04-20
Examinator
Ulf Sellgren
Handledare
Ulf Sellgren
Uppdragsgivare
KTH Maskinkonstruktion
Kontaktperson
Ulf Sellgren
Sammanfattning (in Swedish)
Förnybara energikällor är förmodligen människans framtid. De viktigaste
argumenten för just vågenergi är att vågenergi har en särskilt stor potential, en liten
miljöpåverkan och att den finns tillgänglig i hela världen. För att kunna skörda denna
eneri måste ingenjörerna emellertid övervinna den korrosiva havsmiljön och de
oförutsägbara stormarna, samt säkerställa finansiering för forskning och utveckling.
Efter oljekrisen på 1970-talet, har stora ansträngningar har gjorts för att bygga och
prova WEC och det pionjärarbetet används nu som utgångspunkt för att skapa moderna
alternativ till fossila bränslen.
Syftet med denna avhandling är att analysera de tillgängliga vinschbaserade
vågenergiomvandlarna (WEC) och att jämföra dessa med andra liknande enheter, såsom
WEC-linjer med linjära och hydrauliska system (WEC). Först ges en introduktion till
vågornas fysik och geografi, en beskrivning som innefattar vågbildning och
partikelrörelse. Därefter beskrivs ett antal konstruktionslösningar, deras arbetsprinciper
och historia - oscillerande vattenkolumner, flytande eller bottenfasta enheter, som
baseras på translaterande- eller roterande rörelser. Miljömässiga och ekonomiska
långtidseffekter måste beaktas för denna typ av system. Om vi begränsar oss till
punktabsorberare (PTO), så finns olika typer av kraftuttagssystem tillgängliga - linjära,
hydrauliska eller vinschbaserade, var och en med specifika fördelar och nackdelar. Med
fokus på vinschbaserade system beskrivs tre olika koncept - motvikt, motverkande boj
och ”Lifesaver”-enheter. En uppsättning jämförelsekriterier, som täcker tekniska,
ekonomiska och miljömässiga aspekter av enhetens prestanda definieras. Med hjälp av
dessa kriterier jämförs de tre koncepten och resultaten analyseras.
Keywords: energi, vinsch, PTO, vågenergi

6
List of figures
Figure 1: Wave formation diagram.
Figure 2: Simplified wave model
Figure 3: Deep and shallow water waves; water particles motion.
Figure 4: Six degrees of freedom.
Figure 5: Classification of the spectrum of ocean waves according to wave period.
Figure 6: World wave energy resource.
Figure 7: Seasonal variation in wave energy intensity.
Figure 8: Wells turbine schematic.
Figure 9: Shoreline oscillating water column (OWC) plant.
Figure 10: Backward Bent Duct Buoy.
Figure 11: WEC classification according to orientation to incoming waves.
Figure 12: Singe body WEC.
Figure 13: Two body WEC.
Figure 14: Wave Star WEC – an example of a multi body system.
Figure 15: Salter’s duck.
Figure 16: Bottom hinged WEC.
Figure 17: Bristol cylinder.
Figure 18: Tapered channel, Norway.
Figure 19: Wave dragon over-topping device.
Figure 20: Hose-pump WEC.
Figure 21: Pelamis WEC.
Figure 22: Bottom-fixed heaving WEC – the Archimedes wave swing (AWS).
Figure 23: Pendulor WEC.
Figure 24: Counter weight WEC.
Figure 25: Pulley-gear system.
Figure 26: Counter buoy device configuration.
Figure 27: Capstan equation.
Figure 28: BOLT Lifesaver.
Figure 29: Winch-based PTO.

7
List of tables
Table 1: WEC classification according to location.
Table 2: Sea state and device parameters.
Table 3: Environmental impact of WECs.
Table 4: Cost comparison between Lifesaver and the next-generation device by FO.
Table 5: Winch-based WECs comparison.

8
Abbreviations
CB – counter buoy
CCL – creative commons license
CW – counter weight
ECMWF – European Centre for Medium Range Weather Forecasts
EPRI TAG – Electric Power Research Institute Technical Assessment Guide
FO – Fred.Olsen
LIMPET – Land Installed Marine Power Energy Transmitter
OWC – oscillating water column
PGS – pulley gear system
PTO – power take-off
SWL – still water level
WEC – wave energy conversion (converter)
List of symbols
A – wave amplitude
d – distance to seabed
D – buoy diameter
H – wave height
Hs – wave height
L – wavelength
T – wave period
Te – energy period
P – designed power
Pw – wave power

9
Contents
Acknowledgments 3
Abstract 4
Sammanfattning (in Swedish) 5
List of figures 6
List tables 7
Abbreviations 8
List of symbols 8
1. Introduction 11
1.1 Background 11
1.2 Motivation 12
1.3 Challenges 13
1.4 Thesis outline 15
1.5 Methodology and delimitations 15
2. Frame of reference 16
2.1 Wave physics 16
2.1.1 Wave formation 16
2.1.2. Wave structure 17
2.1.3. Water particle motion and relation to WEC motion 19
2.1.4. Types of waves 20
2.2. World wave energy resource 21
2.3. WECs classification 25
2.3.1. Classification according to location-based 25
2.3.2. Classification according to energy extraction method 26
2.3.2.1. Oscillating water column – OWC 26
2.3.2.1.1. Fixed OWC 27
2.3.2.1.2. Floating OWC 28
2.3.2.2. Oscillating bodies 29
2.3.2.2.1 Translational 30
2.3.2.2.2. Rotational 33
2.3.2.2.3. Mixed 35
2.3.2.3. Other 36
2.4. Existing WECs around the world 37

10
2.4.1. Europe 38
2.4.2. North America 42
2.4.3. Asia 43
2.4.4. Australia 44
2.4.5. Alternative uses of WECs 44
2.5. PTO systems in point absorbers 44
2.5.1. PTO systems 44
2.5.2. Alternative to electric generators 46
2.6. Control mechanisms 47
2.7. Existing winch-based PTO systems 48
2.7.1. Counter weight 48
2.7.2. Counter buoy 52
2.7.3. Lifesaver 54
2.7.4. Aquaharmonics 57
2.8. Environmental impact 58
2.9. Economy of WEC 61
3. Comparative analysis of winch-based PTO systems 63
3.1. Comparison criteria 63
3.2. Comparison and analysis of existing WECs 64
4. Conclusion and future work 67
5. Bibliography 68
Appendix 1 – Coefficients of importance 71
Appendix 2 – Fred. Olsen design guidelines 73

11
1. Introduction
1.1. Background
The main renewable source of energy on Earth is the Sun. All forms of
electrical, mechanical or chemical energy are converted from solar radiation. In recent
years, mankind has become more aware of the harmful effects of fossil fuels on the
planet (air, water and soil pollution); hence, a global tendency has emerged to replace
fossil fuels with cleaner renewable energy sources. Even though wave energy converters
(WECs) are not as common as wind turbines yet, there is huge potential for energy
extraction. The global theoretical energy wave power resource corresponds to is
approximately 8*106 Twh/year (Rodrigues, 2008; Brooke, 2003). Producing the same
amount of energy using fossil fuels would result in releasing 2 million tones of CO2 into
the air (Rodrigues, 2008). Even though only 10 – 15 % of this energy is practically
available due to various reasons such as location or extraction efficiency (Rodrigues,
2008) this could still be a major contributer to global energy supply.
A French man named Girard and his son were the first people to attempt
capturing wave energy. They obtained a patent in 1799 and since then more than 1000
different devices were patented (McCormick, 1981; Ross, 1995).
The first of the modern technologies were developed by Yoshio Masuda (1925-
2009). A former Japanese navy officer, Masuda started his research around 1940s and
developed a navigation powerbuoy that used air turbine and could be classified as
floating oscillating water column (OWC). It was commercialized in Japan, 1965 (and
later in the USA) and a similar but much larger device, Kaimei, was built and tested in
the 1970s (Falcão, 2014).
After the oil crisis in 1973, a lot of effort was made in research and
development of large scale renewable energy systems. A landmark paper was published
by Stephen Salter, University of Edinburgh, in 1974 that described the ‘duck’ - a wave
energy system using rotating gyroscopes (Salter, 1974) . A year later, the British
Government started a R&D programme in wave energy. The Norwegian prototype plant
at Toftestallen started feeding electricity into the grid in 1985 and a formal programme
was initiated in Denmark in 1990s (Falcão, 2014). By the year 2000, major projects

12
such as Islay LIMPET (UK) and Pico OWC (European wave energy project) were
already connected to the grid. (Brooke, 2003).
In order be able to better describe the wave energy resource, studies started in
the countries developing wave energy technologies, e.g. UK. In 1991, a study by the
European commission was started to review the background on wave theory required
for the exploitation of the resource. The result of this study, called WERATLAS
(European Wave Energy Atlas), remains the basic tool for wave energy planning in
Europe.
1.2. Motivation
Wave energy converters have been around for more than 200 years and yet there
are few commercially competitive designs. Despite the fluctuating intensity of the
funding in the field, however, constant research has been done since 1940s. DuPlesis
(2012) lists some of the advantages of wave energy (based mainly on Clement, 2002,
and Ocean atlas) in the list below:
Wave energy has the highest energy density among renewable energies;
There is a limited negative impact on the environment;
The natural seasonal variability follows electricity demand;
There is a negligible demand on land use;
The energy supply is secure;
Wave energy power plants may serve as artificial reefs;
WECs will stimulate declining industries such as shipbuilding, job creation in
construction, maintenance and operations, etc., leading to local economic
development;
Waves can be generated at a location and travel long distance with negligible
energy losses hence allowing for the usage of WECs around the globe
(advantage over wind and solar energy);
There are no carbon dioxide emissions during operation;

13
Behind the WEC may exist a calm-sea area that could be used for the
development of aquaculture or recreational activities;
WECs may be used on remote islands, as a power source for navigation buoys,
or water pumping for fish farms;
WECs can be built into harbour walls, therefore having the dual uses of the
protection of harbours and the generation of electricity;
WECs have long operation life time;
A WEC may reduce grid stability problems as wave energy converters may
make use of synchronous generators that allow reactive power control.
1.3. Challenges
Despite the abundance of energy in the oceans, it is not an easy task to harvest it.
Here are some of the reasons:
In terms of the wave resource:
Waves’ phase, period and direction vary with location, season, time of the day
or because of other unpredictable factors (storms, earthquakes, etc) (Falcão,
2014) which makes waves an intermittent source of energy;
Due to the complexity of the phenomenon, theoretical models are not able to
perfectly predict wave behavior which in turn leads to imperfect designs;
Periodicity of waves can reach 50-years for a particular site (Clement, 2002);
meanwhile, wave energy-specific data has been actively collected for only a few
decades; more time and data is needed;
The irregular, slow motion of the waves is incompatible with the conventional
electrical generators that require a few hundred times greater frequency.
(Clement, 2002).
In terms of the energy extracting technology:
Real ocean tests or wave tanks are required for the development and testing of
WECs. Either of those is costly and hence makes design iterations expensive.

14
Ocean tests are also constrained by strict weather windows for maintenance,
repair and rebuild. Wave tanks are not easily available and might slow down the
testing process (Sjolte, 2014);
Unlike ships, WEC are usually fixed at a specific site and have to be designed
for the worst case scenario. This could mean loading as high as 100 times the
average. If structural strength is underestimated, the device can be easily
damaged. An overestimation, on the other side, leads to unnecessary high costs.
(Clement, 2002);
In order to maximize efficiency, each device is designed based on the most
frequent waves for a specific location. This is an obstacle for mass production
and relocation of devices hence keeps the prices higher (Drew, 2009);
Except for the high irregular loads, corrosive sea water, high pressures or UV
radiation might be additional constrains that have to be accounted for (Drew,
2009);
The incoming waves have a specific range of wavelengths and periods, which
limits the maximum power of most of the WEC technologies (Sjolte, 2014);
As the energy generation is likely to vary in intensity usually some kind of
energy storage and power smoothing systems are needed along with other
components of the WEC.
Since many factors have to be taken into account (efficiency, survivability, cost)
and the technology is yet immature, the overall design is a difficult task.
Construction and maintenance may be challenging offshore.
In terms of compatibility to the grid:
Wave power offshore is a few times higher than near shore areas. However,
offshore devices need transmission cables to connect the WECs to the grid. That
increases the capital and maintenance costs (Du Plessis, 2012);
Due to high design and production costs most of the current WECs are not
competitive on the current energy market (Clement, 2002);
Fluctuating power from WECs have to be adapted to the grid (Du Plessis, 2012);

15
Other:
Legal issues might arise if more than one party would like to use the same
resource (once a wave passes through a WEC, its energy is transferred to the
device hence a hypothetical device down the road will receive less energy);
Lack of funding / investors due to the high risks and low investment return rate;
Some of the WECs are not powerful enough and a group of several devices has
be deployed (creating a wave energy farm) in order to reach the desired power
rating; this would require additional work and funding;
WECs might affect marine life, shipping, tourism and fishing.
1.4. Thesis outline
The purpose of the thesis is to review the current state wave energy conversion
with a focus on winch- (or drum-) based devices; to compare and analyze those devices
to other similar scale devices; and answer the following research questions:
What are the advantages and disadvantages of the winch-based systems
compared to linear systems?
What are the design requirements of a winch-based PTO.
1.5. Methodology and delimitations
The methods used in the creation of this thesis include collection, analysis, and
restructuring of existing knowledge in the forms of paper-based and electronic souses;
as well as critical analysis and comparison of different concepts.
The thesis will not include detailed design, construction or testing of any
devices.

16
2. Frame-of-reference
2.1. Wave physics
2.1.1 Wave formation
Wave formation starts with solar radiation. Due to the uneven heating of the
Earth’s surface, volumes of air expand and pressure differential is created. The
differential is the reason for the air flow also known as wind and the friction between
the water and air transforms the motion into small waves, called capillaries. Provided
favorable conditions are present, the waves grow bigger accumulating more and more
energy. Hence, wave energy can be seen as concentrated solar energy: from about 1000
W / m2 originally to between 10 - 100 kW per meter crest length (Du Plessis, 2012).
The three main factors governing the wave size are the wind speed, the length of
time during which the wind acts on the water surface and the ‘fetch’ - the distance over
which the wind blows (Figure 1). The winds creating a wave front can be either random,
such as a storm, or regular, such as trade winds. The presence of these constant winds
leads to locations with more energetic wave climates such as South-West coasts of
South Africa, South America, Australia, New Zealand, Europe and the North-West
coasts of North America (Du Plessis, 2012).

17
Figure 1: Wave formation diagram
2.1.2. Wave structure
Real ocean waves are a complex phenomenon. In this thesis will be considered a
simplified model of the waves where they are two-dimensional in x-z plane (Figure 2),
also called ‘plane waves’ as their front moves in parallel planes. Since only
axisymmetrical buoys will be analyzed, this model will be sufficient.
A wave is described by two main parameters: period (T) and wave height (H).
Other parameters (wavelength, speed) could be derived from those. The shape of the
water surface could be represented by a cosine function depending on the time and
distance from a reference point, η(x,t). Still water level (SWL; z = 0) represents a
perfectly calm sea. The highest point of the wave is called crest and the lowest – trough.
The distance between the SWL and the crest is called amplitude (A) and the difference
between the crest and trough is the wave height (H) (note that H = 2 A). Wavelength (L)
is the distance between two equivalent points on the curve, for example, two
neighboring crests. The distance from the seabed to SWL is d.

18
Figure 2: Simplified wave model
Real seas contain waves with random height, period or direction and remain
constant for only a short period of time. Using statistical approach, a sea state can be
described by analyzing the whole wave spectrum. The resultants are significant wave
height (Hs) and energy period (Te). Significant wave height is the average height of the
highest one-third waves; energy period is the mean wave period compared to the
spectral distribution of wave energy transport (Brooke, 2003).
To determine the power that waves contain the following relationship for deep
water waves given by Brooke will be used:
Pw = 0.5 Hs2
Te [ kW/m ] (Eq. 1)
where Hs is the significant wave height, Te is the energy period and Pw is the wave
power. Alternative sources give different coefficient in front of H, most commonly 0.42
(Rodrigues, Baris).
It can be seen that the wave height has significant part in the amount of energy
in the wave. However, if the wave steepness, H/L, is greater than 1/7 the wave
becomes unstable and breaks which limits the energy that can be carried.
Waves are differentiated according to the ratio between wavelength and water
depth (Figure 3):

19
if d > L / 2 waves are called deep water waves. It is assumed that seabed has no
effect on the wave behavior in this case as wave motion decreases exponentially
with depth; at d = L / 2 motion is negligible;
if d < L / 20 waves are called shallow. With increasing depth waves vertical
motion decays and only horizontal motion is present at seabed;
if L / 20 < d < L / 2 waves are called intermediate.
In the near shore regions wave height and period are significantly lower
compared to offshore waves. From an energy perspective it is preferable to locate a
WEC offshore. Hence only deep water waves will be considered in this thesis.
Figure 3: Deep and shallow water waves; water particles motion.
2.1.3. Water particle motion and relation to WEC motion
As can be seen on Figure 3, water particles move along circular paths. There are
both vertical and horizontal forces (functions of x and t), the combination of which
would act on any body submerged in the water. The intensity of these forces and
therefore the displacement of the water particles decreases with depth hence at the SWL
forces are greatest. In general, a floating body has 6 degrees of freedom – 3 translational

20
and 3 rotational (Figure 4). For the purposes of this thesis only heave, surge and pitch
will be considered.
Figure 4: Six degrees of freedom.
2.1.4. Types of waves
As wind blows over the water surface and gravity acts as a restoring force, the
wave height and period increase. Starting with capillary waves (negligible wave height,
period ~ 0.1 sec), then ‘chops’, ‘swells’ (waves traveled away from the wind generation
zone; they have the highest wave height and hence carry the greatest amount of energy;
these are the primary target of the WECs) and finally ‘seiches’ (relatively long period,
1-2 min). Tsunami and tide are not wind-generated waves; even though they have
significant wave height, they appear rarely and will only be considered as the ‘worst
case scenario’ in the design process.
An important point to mention is the ability of the waves to travel long distances
with losing very little of their energy. This means even if there are no winds on a
particular location waves can still be present and hence WECs used.

21
Figure 5: Classification of the spectrum of ocean waves according to wave period. Image: Walter H.
Munk. CCL
2.2. World wave energy resource
The power of ocean waves is usually described in kW/m wave crest. Using
Eq. 1, only significant wave height and energy period are required to determine the
power. The value refers to the average power that passes through cross section one
meter in width and infinite depth, perpendicular to the wave length. Typically, a good
location will generate between 20 – 70 kW/m (Baris). Depending on the type of WEC,
between 20% and 50% of that energy can be captured. However, point absorbers have
the ability to resonate with the waves and can capture up to 6·π times their width with
respect to the incoming energy (Sjolte, 2014).
There are several ocean atlases that can be used as data sources. In the case of
offshore projects, the most commonly used is WERATLAS, the European Wave
Energy Atlas – a European Commission funded project, focused on North-Eastern
Atlantic Ocean and the North, Norwegian, Barents and Mediterranean Seas. It uses
wind-wave numerical simulations validated by in situ measurements in questionable
ares. Another atlas is Furgo OCEANOR. They use data from the European Centre for

22
Medium Range Weather Forecasts (ECMWF) which is then validated and calibrated
against satellite data. OCEANOR offers offshore wave parameters and full directional
spectra time series data as well as up to 50-years associated statistics.
As waves approach the shore their characteristics are modified by seabed effects,
refraction, diffraction or sheltering by islands. Therefore, detailed maps for specific sites
are usually produced only when needed. An exception is ONDATLAS which covers the
Portugal coast that has a relatively straight bottom profile. Due to its location and
climate, Ireland can meet 75% of its electric needs from wave energy. The Ireland's
marine renewable energy atlas covers small area around the island, focusing on the
Atlantic coast, and is updated hourly. Information about waves’ height, period, mean
power, etc is available.
The wave energy distribution is uneven across the globe. The highest values for
wave energy are between 40 – 60 degrees in both hemispheres (Figure 6). The southern
hemisphere, however, is subject to much lower seasonal variation and hence could be
described as more resourceful. For a more detailed picture we should mention the
British Isles, Iceland, Greenland, and somewhat lower energy levers at the western coast
of the US and Canada in the north; in equatorial waters power levels vary between 15 –
20 kW/m annually, highest off Peru and Ecuador; south: Southern Chile, South Africa
and the south coasts of Australia and New Zealand.
According to Cruz (2008) the points with highest levels of wave energy are
about 48°S 90°E with annual average above 140 kW/m; and 57°N 21°W with 90 kW/m.
Both of these locations, however, are too far away from the shore and the water depth
exceeds what is currently technologically practical – 50 – 60 m depth.

23
Figure 6: World wave energy resourse. Image: Cruz, 2008.
Wave intensity varies along the year, differently for north and south hemisphere.
A point to note is that higher energy levels are present during the winter period which
matches with the higher electricity demand.

24
Figure 7: Seasonal variation in wave energy intensity. Image: Cruz, 2008.

25
2.3. WECs classification
2.3.1 Classification according to location-based
In this thesis the WECs will be classified according to location and working
principle. This classification does not pretend to be the only correct one or to cover all
aspects of the devices but it gives an overall idea about the similarities and differences
between the devices.
According to location there are three types of WECs: shoreline, near shore and
offshore. Each of them is characterized in Table 1 below.
Table 1: WEC classification according to location.
Shoreline (fixed to or embedded in the shoreline):
Advantages Disadvantages
close to utility network;
easy to build and maintain;
lower chance of damage due to severe waves;
coastal structures can support bigger and heavier
devices hence cheaper materials can be used;
no need for long transmission cables or moorings;
presence of ‘hot spots’ - local high energy regions
created by diffraction and refraction near shore (if
location is carefully chosen).
near shore waves carry less energy;
tidal range can be an issue;
devices are site specific and require
knowledge of the shoreline
geometry and geology and cannot
be designed for mass
manufacturing;
design must comply with
preservation the coastal scenery.
Near-shore (devices in water shallower than ¼ wavelength (Duckers, 2004)):
Advantages Disadvantages
usually attached to seabed which gives a good
stationary base.
shallower waters allow for less
energy harvest.
Offshore (devices in water deeper than 1/3 wavelength (Falnes, 2007); 40 m and deeper):

26
Advantages Disadvantages
deep waters offer higher energy content for
extraction;
deep water floating devices are said to have
greater structural economy (Korde, 2000).
harder construction and
maintenance;
devices have to be designed for
extreme weather conditions which
adds to their cost.
2.3.2. Classification according to energy extraction method
In order to be able to extract energy from the oscillating waves, a WEC must
have a stable reaction point. Depending on the design this could be the seabed or a
specific part of the device.
2.3.2.1. Oscillating water column – OWC
Oscillating water columns use the motion of the waves to run water or air
turbines. Commonly used is the Wells turbine, developed in 1976 by Alan Wells in
Queen’s University, Belfast, UK. The main advantage of the turbine is that it works
regardless the flow direction. This, however, leads to lower efficiency because of the
large angle of attack to the blades.

27
Figure 8: Wells turbine schematic. Image: Dominik Lenné, CCL.
Alternatives to the Wells turbine are the I.A. Babinsten’s self-rectifying impulse
turbine and a device by G.D. Filipenco, (US patent number: US3912938 A), both
patented in 1975 (McCormick, 1981).
2.3.2.1.1. Fixed OWC
OWC can be either fixed or floating. In the first case, a partly submerged
concrete or steel structure creates a chamber at the end of which is the air turbine. As
incident waves reach the device, water level in the chamber rises, pushing the trapped
air and creating a flow through the turbine. The rotation of the turbine is turn drives an
electrical generator.

28
Figure 9: Shoreline oscillating water column (OWC) plant.
Due to the relatively easier construction compared to open sea devices, fixed
OWC were one of the first types of WEC to reach the national grid as early as 1980s
(Falcão,2014). Full scaled projects were developed in Norway (in Toftestallen, 1985),
Japan (in Sakata, 1990), India (in Vizhinjam, 1990), Portugal (Pico, On the Azores,
1999) and the UK (LIMPET in Islay, Scotland, 2000). The biggest of all such projects,
called OSPREY, was destroyed by the see shortly after being deployed near the Scottish
coast in 1995. The installed power capacity of such devices usually varies between 60
and 500 kW (reaching 2 MW for OSPREY (Falcão,2014)). OWC can be fixed to
breakwaters. This benefits both sides during the construction.
An improvement to the OWC design was the introduction of a collector that
would increase the area of operation of the OWC. A large parabolic-shaped collector
was developed by the Australian company Energetech and a prototype (Oceanlinx Mk
1) was tested in 2005.
2.3.2.1.2. Floating
An alternative to the fixed OWC are the floating ones, located in near-shore
waters where wave energy is greater. First of those devices was developed by Yoshio

29
Masuda in Japan in the 1970s. The barge, called Kaimei, had thirteen open-bottom
chambers built into the hull, with a water plane area of about 45 m2 each. During the 3
year testing period a variety of air turbines were tested, both self-rectifying and one-
directional with additional rectifying valves. Along with Japan as the lead partner,
contributors from the UK, Canada, Ireland and the USA were involved.
A later project of Masuda was the Backward Bent Duct Buoy (BBDB). It
consisted of a tube with the air turbine at the end and a buoyant body to keep the device
afloat.
Figure 10: Backward Bent duct Buoy.
A 1:4th-scale model of the BBDB has been tested in Galway Bay, western Ireland since
2006. It was equipped with a horizontal-axis Wells turbine and later upgraded to an
impulse turbine.
2.3.2.2. Oscillating bodies
Depending on their orientation to the incoming waves, devices can be described
as attenuators, terminators or point absorbers. Attenuators lie parallel to the
predominant wave direction and ‘ride’ the waves. An example is a ‘sea snake’-like
device called Pelamis. Terminators are devices with their principal axis perpendicular to
the predominant wave direction, intercepting the waves. Wave roller is an example. The
third type, point absorbers, are small compared to the wave length and hence the wave
direction is not important. An example – Powerbuoy.

30
Figure 11: WEC classification according to orientation to incoming waves.
2.3.2.2.1 Translational
Using the heave or surge motion, the translational devices can be single-body or
multi-body devices.
Single-body WEC use the seabed or a fixed structure as a reference point. They
can be submerged (Archimedes wave swing) or floating, using linear or rotary
generators, purely mechanical or hydraulic PTOs (see chapter 2.5.1.). Such devices have
been developed around the world (Denmark, Sweden, USA) as early as 1990. Because
they are relatively smaller compared to fixed OWC, lower rated power can be achieved.
Often multiple devices are combined in a ‘farm’ to reach a certain power output.

31
Figure 12: Singe body WEC.
Multi-body systems use the motion of one body relative to another to extract
energy. For example, Power buoy has a floater moving against a heave plate and hence
driving a generator (Figure 13). There is no need for bottom-based components such as
support structures or heavy duty moorings, which is an advantage. However, control
issues may rise as the dynamics is more complex. Other devices using similar principle
are IPS Buoy and Wavebob.

32
Figure 13: Two body WEC.
A different approach to the multi-body concept has the WaveStar. The device is
consists of two rectilinear arrays of floaters located on both sides of a bottom-standing
platform. The waves make the buoys heave up and down pumping oil in a hydraulic
system. Scale models were deployed in Denmark in 2006 and 2009. Sinnpower,
founded in 2014, has a similar concept but the structure is floating. Multiple modules,
each comprising a buoy, a rod and reaction structure, are connected in a steel matrix. As
the front rows heave up, the rear heave down, creating relative motion against each
other. The company has projects in Greece, India and the Caribbean sea.

33
Figure 14: Wave Star WEC – an example of a multi body system. Image: WaveStarEnergy
2.3.2.2.2. Rotational
The main types of devices using rotational motion are either pitching floaters or
bottom-hinged systems.
In the case of pitching devices most of the energy comes from relative rotation
of the devices. A well known example and one of the first constructed pitching devices
was the ‘nodding duck’ developed by Stephen Salter in Edinburgh in 1970s. Many of
these rather small devices (less than a meter in diameter and 6 m in length) are
connected in a row and the relative rotation between the inner circle and the outer
floater creates electricity.

34
Figure 15: Salter’s duck.
The bottom hinged devices are mostly terminators (Figure 16). They use the
horizontal force of the incoming waves to drive a generator or a hydraulic pump. An
example could be the Wave roller, developed by AW-Energy Ltd.

35
Figure 16: Bottom hinged WEC.
2.3.2.2.3. Mixed
Some designs try to maximize the energy extraction and include both rotational
and translational motion. The Bristol cylinder, developed in 1970s by D. V. Evans
comprises of a submerged cylinder connected to hydraulic rams that absorbs motion in
both vertical and horizontal direction.

36
Figure 17: Bristol cylinder.
2.3.2.3. Other
Over-topping devices are deigned to collect ocean water and use it to run
conventional low head water turbines (such as the Kaplan turbine). In the case of
Norwegian Tapered channel (or Tapchan) incoming waves are directed into a reservoir
through a narrowing channel – the collector. The reservoir is held above mean sea level
so that a pressure head is created for the turbine to run. The design was created in 1980s
in Norway and a prototype was tested between 1985 and 1991.
There are alternative designs that use the similar over-topping principle but on a
floating platform (e.g. Wave Dragon).

37
Figure 18: Tapered channel, Norway.
Bombora wave power, an Australian ocean energy company, founded in 2012,
has developed a membrane pump, called mWave. The device consists of a elongated
bottom fixed structure with inflatable rubber membranes, positioned at an angle to the
wave front. As waves pass over the device, the rubber membranes force air to circulate
through a generator and then return for the next cycle.
2.4. Existing WECs around the world
Since the oil crisis in 1970s the research in wave energy has never fully stopped,
even though there are waves of enthusiasm and disappointment. The first nations to
engage in the area were Japan in Asia and Ireland, UK, Norway, Sweden, Denmark and
Portugal in Europe. However, along the way many more countries joined and many
devices were designed and tested. The current chapter is an overview of th world’s
effort to tame the waves.

38
2.4.1. Europe
DENMARK
Lying on the North sea coast, Denmark has annual resource between 7 and 24
kW/m (Clement, 2002). The Danish wave energy programme started in 1996 after a
successful wind energy experience. The Point Absorber Wave Energy Converter,
developed by Rambøll, has already gone through a few scale models. The devices
consists of a floater that activates a piston pump. The floater is attached to a suction cup
via a polyester rope. Another notable device is the floating over-topping Wave Dragon.
It comprises of a collector and a Kaplan turbine similarly to Tapchan and Oceanlinx.
Figure 19: Wave dragon over-topping device. Image: CC Erik Friis-Madsen.
IRELAND
Ireland is one of the richest countries in terms of wave energy. According to
Clement (2002), ‘total incident wave energy is around 187.5 TWh’ (compared to 30
TWh in Denmark). Due to the available resource, a number of governmental and private
organizations as well as universities are focused on wave energy research. Focus on
wave and climate prediction methodology.
NORWAY
Norway has a long west coast exposed to the Atlantic ocean which gives the
country plenty of sites and wave energy to explore. Its investigation started back in
1970 with Tapchan (see chapter 2.3.2.3.). In the 1970, Kvaerner Brug AS and the
Norwegian Institute of Technology developed a phase controlled buoy with hydraulic
PTO, funded by Royal Norwegian Council for Scientific and Industrial Research.

39
During the development a the hydraulics were replaced by pneumatic system and scale
models were build. Most recently was developed ConWEC (Controlled WEC). The
device explores the combines usage of OWC and a float and targets near-shore to
offshore areas.
PORTUGAL
With annual wave power rates of 30 – 40 kW/m, Portugal is a relatively good
candidate for WECs deployment. Portuguese government supports the R&D of wave
energy through various channels (Ministries of Science, Ministry of Economics) and
universities have been working on wave energy devices since 1978. The country also
hosted the first EU OWC project called PICO and located in the Azores. Rated 400
kW, Pico was designed for both testing and energy supply. The project was built
between 1992 and 1999. Since then the a number of improvements have been made.
However, technical difficulties and unsteady funding made the project stop and start
often. There are plans for future development.
SWEDEN
Although Sweden has less good areas for utilizing wave energy, back in 1976
was founded Wave Energy Research Group including Chalmers University and the
private consultant Technocean. In 1980 was developed the first full scale point absorber
buoy ‘Elskling’ funded by IPS. Another interested design was the Hosepump, tested
between 1983 – 1986. The Hosepump is a two body oscillating system with an elastic
hose between the floater and the damper. Check valves are attached at both ends. As the
system oscillates, the hose’s volume decreases, pumping water through a hydraulic
system which in turn drives a generator. A floating over-topping device, Floating Wave
Power Vessel, was deployed near Stockholm in the 1980s. Although there is not active
research programme today, such programmes were carried out between 1980 – 1986
and 1989 – 1996. Nowadays, active Swedish companies on the market are IPS (that
developed IPS buoy), Sea Power International and CorPower (founded 2009 by Stig
Lundbäck).

40
Figure 20: Hose-pump WEC.
UNITED KINGDOM
Similarly to Ireland, UK has a great wave energy potential on its west coast. The
R&D of wave energy started shortly after 1973 oil crisis with S. Salter and his nodding
duck. Meanwhile more that ten other wave energy projects were initiated (Clement,
2002). The government support was strongest between 1973 – 1983 and 1999 – 2003
(R&D received about £3 million for the period).
One of the well known WECs – Pelamis – is also located in the UK. The 130 m
long sea snake is a terminator that uses hydraulic rams inside hinged joints. A 375 kW
device is being developed by Ocean Power Delivery Ltd.
Figure 21: Pelamis WEC. Image: Wikipedia.

41
Located on the Isle os Islay, LIMPET (Land Installed Marine Powered Energy
Transformer) is a modular OWC. Using the experience from previous projects,
LIMPET consists of three water columns and is equipped with two counter rotating
Wells turbines, each rated 250 kW.
Two main structures support the work on wave energy R&D – Marine Energy
Technology Network (METN), serving as a network for universities, companies,
consultants etc; and the ‘Sea Power Association’ working closely with METN and the
British Wind Energy Association (BWEA).
OTHER
Although most of the other European countries have less contribution to the
wave energy research in the recent years, there are some projects worth mentioning.
Archimedes Waves Swing (AWS) is a Dutch submerged heaving system that utilizes
the variation in hydrostatic pressure as waves past above. Developed by Teamwork
Technology BV, a 2 MW prototype has been completed.
Figure 22: Bottom-fixed heaving WEC – the Archimedes wave swing (AWS).

42
Despite the number of projects that were undertaken in France during the
1980s, the country has reoriented to dynamic absorption problem solution (the
development of wave absorbing devices – paddles) and optimal control systems for
OWC devices.
Greece has a 16 000 km long coast and despite the rather low energy waves
there are a number of hot spots thanks to the many islands. There is also WEC market
since many of these islands rely on diesel engines (Clement, 2002). However, wind
energy has already taken over the governmental support and all research in wave energy
systems is mainly done in universities or the Centre for Renewable Energy Sources.
Similarly to Greece, Italy has relatively low energetic coastlines and R&D focus
is at universities. Two devices to be mentioned are the ISWEC (Inertial Sea Wave
Energy Converter), developed in University of Rome, which is suitable for closed sea
applications where the wave power is low to moderate. The second, ENERMAR, is
worked upon by Ponte di Archimede nello Stretto di Messina and utilizes marine
currents. Currently a 130 kW prototype is being constructed.
2.4.2. North America
Despite good energy climate on the west coast, the USA has rather low interest
in WECs. In the 1990s the country invested in building and testing the McCormick air
turbine as part of the International Energy Agency’s contribution to Kaimei. McCabe
Wave pump and the Ocean Power Technologies are currently the two bigger projects in
the country. McCabe Wave pump is a pitching device that consists of forward, central
and aft pontoons, hinged together. Hanging below is a damper plate (multi-body
device). The incoming waves and the damper plate make the hinged pontoons rotate
against the central one. A prototype was deployed in Ireland in 1996.

43
2.4.3. Asia
India, Sri Lanka and China focus mainly on OWC. China currently tests
BBDB converters. S.D.E. Ltd. in Israel has developed a device that utilizes both the
kinetic and potential energy of a wave to generate hydraulic pressure and hence
electricity.
Japan was one of the first countries to research WEC. A project from the 1980s
called Pendulor (Figure 23) is one of the first hinged terminator type WEC. Currently,
except for the relatively small unmanned buoys that are being charged by wave power,
there is only one big project – the Mighty Whale. The Mighty Whale (50x30x12 m,
displacement 4400 t), a device developed by Japan Marine Science and Technology
Center, consists of a three air chambers located side by side at the front and buoyancy
tanks. Each air chamber is connected to a Wells air turbine that drives an electric
generator with total rated power of 110 kW. The device was deployed in 1998 and
tested for several years.
Figure 23: Pendulor WEC. Image: MDPI

44
2.4.4. Australia
Being completely surrounded by water, Australia has the conditions for wave
energy devices. However, because of the relatively low energy demand there is very
little done on wave energy. A project to be mentioned is the OWC by Oceanlinx. A few
pototypes were tested at Port Kembla since 2005 (Figure 10).
2.4.5 Alternative uses of WECs
Wave energy devices are not competitive on the general energy market yet due
to the expensive development and capital costs. However, WECs might be a cheaper
alternative for some isolated islands where the main source of electrical power comes
from diesel engines. Their substitution with WECs will have positive effects on the
economy, environment and overall well-being of such areas. More, instead of electrical
energy, WECs can be designed to produce fresh water for the household, livestock and
crops. This can be achieved by modifying a hydraulic system to create the pressure,
required for reverse osmosis, and desalinate sea water. The McCabe wave pump is an
example of a device designed to produce potable water (Brooke, 2003). Alternative uses
of the WEC might be aeration of stagnant bottom water, a reserve power source in sea, a
recharge station offshore for buoys or other autonomous devices (Brooke, 2003).
2.5. PTO systems in point absorbers
2.5.1. PTO systems
Point absorbers are usually devices relatively small compared to a wave length.
They can be floating or bottom fixed, usually located near- to offshore. Particularly
important component is the power take-off (PTO) system which is responsible for
converting the wave energy into electrical energy. Usually the PTO consists of a

45
primary and a secondary conversion system because of the differences in frequency
between waves and conventional electrical generators.
As of today, the most common way to generate electricity is by using rotary
generators with the linear generators being an alternative. One of those two options is
usually chosen for the secondary conversion. There is greater choice regarding the
primary conversion – hydraulic driven generators, rods or cables attached to linear
generators, gearboxes as a link between linear motion and rotary generators, etc. Each
of those, however, has specific advantages and weaknesses, some of which are
described below.
Linear generator systems advantages:
allow for direct conversion of the waves’ heaving motion into electricity;
no rotating parts or high pressure valves.
Disadvantages:
end stops problem: as the system oscillates, the moving component of the linear
generator exerts forces on the fixed component at every cycle, which leads to
fatigue; in the case of an extremely strong waves, the system can be damaged
(Figure 12);
rods buckling/bending (especially if side loads are present).
Cable and drum systems advantages:
no end stops;
direct conversion of rotary motion to electricity.
Disadvantages:
drum diameter is directly related to cable bending and hence fatigue; however,
larger drums are heavier and require bigger buoys;
the drum has to be rewound at the end of every cycle in order to start the next.
Hydraulic systems advantages:
The hydraulic systems are well adjusted to slow, high load forces;
there are less moving parts compared to a purely mechanical system which leads
to longer lifespan for the device;

46
hydrostatic systems traditionally have high peak efficiency (< 80 % (Du Plessis,
2012);
most hydraulic components are readily available.
Disadvantages:
because of the high pressures, hydraulic fluid containment is possible;
sea water could be used as a hydraulic fluid, however challenges may rise due to
sealing and leakage, working temperature and pressure, deposition of solids,
biological growth, lubrication or corrosion (Du Plessis, 2012);
despite the high peak efficiency, the frictional loses, leakages and and
compressibility lead to much lower real efficiencies; moreover, it is unlikely that
a device will spend much time working at its ideal conditions due to the
variability of the wave characteristics;
end stops problem.
2.5.2. Alternative to electric generators
The main devices used to convert the mechanical power of the waves to
electrical are the linear and rotary electric generators and some hydraulic motors. A
more recent idea is the usage of piezoelectric materials and dielectric polymers. These
materials, called also ‘smart materials’ (Tanaka, 2015), are able to produce electricity in
result of some mechanical deformation, such as bending, stretching, etc. This
technology usually consists of a base material, such as silicon rubber, that would
provide the mechanical support and durability; and a piezoelectric film, which will
create the electric charge. The lack of complex mechanical devices, such as a generator,
may reduce costs and help the wave energy industry become competitive. Some
research has been carried out, e.g. Tanaka (2015), Zurkinden (2007), Matsuda (2013).

47
2.6. Control mechanisms
During the design process specific design parameters (or a narrow range of
those) is selected in order to maximize energy extraction. In the case of point absorbers,
resonance concept can be used to further increase the efficiency of the device. At
resonance, the oscillating motion is matched with the incoming waves resulting in a
substantial energy transfer due to the increase amplitude of oscillation and forces.
(Drew 2009). However, in real seas the conditions vary greatly hence the device’s
oscillating frequency is matched with the waves only in a fraction of the time. To
overcome the problem, engineers have developed different control mechanisms. An
example of an active control mechanism is the latching. The idea, proposed by Budal
and Falnes in 1980, is to stall (i.e. latch) the device until the wave phase is appropriate
for resonance. There could be different levels of tuning, from sea-state to independent
wave control (fast tuning). The mechanism can be only applied to a device whose
natural frequency is higher than the wave excitation frequency. Although this could be
restricting in general, latching control is widely applicable to point absorbers, which
smaller mass usually meets the requirements. Research on latching has been carried out
by Babarit, Clement, Falcão, Valerio, Korde, etc. (Drew 2009).
An alternative is the so-called declutching (unclutching, dubbed unlatching)
where the primary element of the system is allowed to float freely during some parts of
the cycle. The PTO component and hence the energy extraction is only used at the
desired conditions. For example, in the case of a hydraulic system, valves could be open
to allow for free flow without energy extraction. In an experiment including the
SEAREV device, the efficiency was seen to improve by a factor of two for some wave
conditions (Drew 2009).
Reactive loading control is another control mechanism aiming to broaden the
efficiency range both below and above the resonance frequency. The main tool it uses to
maximize energy absorption is the adjustment of the dynamic parameters of primary
converter (spring constant, inertia, damping).
48
2.7. Existing winch-based PTO systems
In this section a few variations of the winch-based PTO will be compared. All
devices use electro-mechanical systems. The main difference is in the mechanisms used
to rewind the drum.
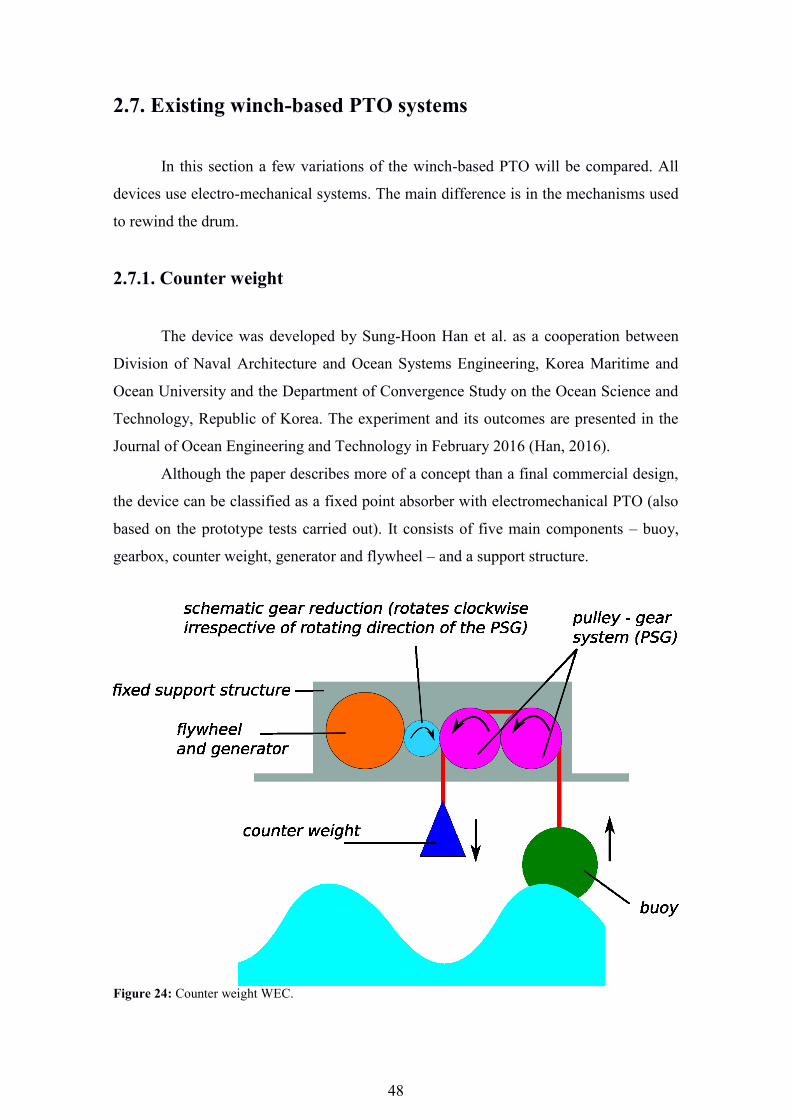
2.7.1. Counter weight
The device was developed by Sung-Hoon Han et al. as a cooperation between
Division of Naval Architecture and Ocean Systems Engineering, Korea Maritime and
Ocean University and the Department of Convergence Study on the Ocean Science and
Technology, Republic of Korea. The experiment and its outcomes are presented in the
Journal of Ocean Engineering and Technology in February 2016 (Han, 2016).
Although the paper describes more of a concept than a final commercial design,
the device can be classified as a fixed point absorber with electromechanical PTO (also
based on the prototype tests carried out). It consists of five main components – buoy,
gearbox, counter weight, generator and flywheel – and a support structure.
Figure 24: Counter weight WEC.

49
Working principle
The study evaluates only the primary efficiency of the system. Additional
resistance is added to account for the generator. Also, it will be assumed that the support
is a fixed structure hence motion of the pulley/gear system (PGS), flywheel and
generator can be neglected. The buoy has mass greater than the mass of the counter
weight (CW). The two are connected through the PGS so that as the waves lift the buoy
up, the CW sets the generator in motion; as the buoy heaves down, the latter rotates the
generator and lifts the CW, preparing the system for the next cycle. The wave energy is
first converted to torque, rotating the flywheel, and then to electricity, rotating the
generator. There is a possibility to regulate the CW mass which in turn can be used to
optimize the response rate of the buoy.
The novel concept in the design is the bidirectional PGS that allows for energy
extraction no matter which way the buoy moves. This is achieved thanks to clutches in
both pulleys, allowing rotation in one direction and stop rotation in the opposite
direction. The configuration of the pulleys can be seen on Figure 25. The rotation of the
pulleys is translated to the flywheel through a gearbox. The gear ratio converts the slow
heaving motion to a higher speed rotation, required by the generator; the flywheel is
used as an intermediate energy storage which helps to steady the energy fluctuations
from the waves. The CW also is the rewind mechanism for the system.

50
Figure 25: Pulley-gear system.
Experimental conditions
The Korean team designed and build a 1:20 scale model which was tested in a
two-dimensional basin (sized at 25 m (L) × 1 m (B) × 0.7 m (D)). The wave parameters
used were obtained from the scaled annual wave parameters for the coast of Jeju Island,
South Korea, namely wave period of 0.9 ~ 2.0 s and wave height of 0.10 m. The
respective buoy diameter was 0.5 m. The buoy hemispherical shape and designed size
were adopted from the Danish Wave Star WEC. Five different combinations of buoy
mass, counter mass and flywheel inertia were tested in order to find the best
combination and mass ratios. (Buoy mass: 9.3 or 18.6 kg; CW mass: 2, 6 or 12 kg;
Flywheel moment of inertia: 0, 0.0038 or 0.0060 kg.m2
). Generally, the best mass ratio
of buoy/CW is 3/2.
Results
For wave periods about 1 s, best power generation was achieved without
flywheel (inertia = 0). In the more extreme conditions of 1,7 – 2 s, the presence of a

51
flywheel improved the power generation, however, with lower maximum compared to
the 1st case.
The increase of the buoy and CW masses, maintaining the ratio, leads to
increase in power generation for wave periods between 1 – 2 s, although the effect is
exactly opposite for the lower wave periods.
In the study was also used the concept of capture width ratio (CWR) – the
fraction of the wave energy that is actually converted to the primary conversion system.
This is an estimate of the efficiency of the PTO system. According to the study, the
CWR calculated was 45% (at up-scaled wave period = 5.36 s). The up-scaled power
generated was 95 kW (with the largest buoy and CW masses, wave period 5.36 s). The
equation used to calculate the CWR is given below:
CWR = P / (D x Pw) (Eq. 2)
where P is designed power (dependent on torque and speed), D is the buoy diameter and
Pw is the wave power (dependent on water density, wave height and period).
The study concludes that both power generation and efficiency are strongly
dependent on specific wave conditions. Hence, selecting the optimal masses is crucial
for good results. The findings of the study could be used as a starting point for future
projects including the counter weight concept.
Counter-weight WEC summary:
Advantages:
bidirectional energy absorption;
no energy is wasted rewinding the winch (done by gravity);
equalized energy input to generator thanks to the flywheel.
Disadvantages:
bidirectional gearbox is rather complicated piece of equipment with many
moving parts hence lower durability and higher maintenance costs;
requires a support structure;
pendulum effect: the hanging freely mass can exert unwanted and hardly
predictable motion that can damage the device;

52
survivability: the limited length of the cables, supporting the CW, can lead to
damage in the case of a higher-than-expected wave heights; on the other side,
increase in the cable length leads to greater pendulum effect.
2.7.2. Counter buoy
The second device to be presented is very similar to the counter-weight,
however, using a buoy instead of a mass and buoyancy force instead of gravity. The
project was presented at the World Renewable Energy Congress in Linköping, Sweden,
in 2011. It is a joint project between scientists from University of Hawaii, USA, INSA,
France and Chalmers University of Technology, Sweden.
The device is designed as a low cost point absorber with electromechanical PTO
which aims to charge electrical vehicles. It utilizes the heaving motion of the waves and
converts it into electricity through a permanent magnet AC generator. The total cost of a
2 kW WEC is said be less than $ 2000, including the generator and cables (Foster,
2011).
Working principle
The device can be separated into three main components: the floater, the PTO
unit and the counter-buoy. The PTO unit (including the motor/generator, a drum and an
inertial wheel) could be located at the seabed, however, this leads to difficulties related
to leaks, deployment and maintenance. To overcome these obstacles, the designers
suggest to put the PTO unit on a column, fixed to the seabed with a concrete anchor-
base. In this case, the PTO is above the mean sea level which makes it accessible and
does not require watertight housing. Additional structure, however, has to be
present/built.

53
Figure 26: Counter buoy device configuration.
The floater is at the water surface and the counter-buoy is submerged
underwater. To allow for undisturbed motion of the two buoys, additional pulleys are
located at the seabed, guiding the buoys away from each other. The buoys are connected
with a single cable that has been turned around the drum enough times to provide
friction and prevent unwanted sliding. Given the tension on both sides of the drum and
the friction coefficient, the capstan equation can be used to determine the number of
turns required. Once this number is reached, the drum will only turn when the floater
oscillates. The floater is the main power generator and the smaller buoy provides the
tension to keep the cable on the drum from sliding and also rewinds the floater’s cable.
As in the counter-weight device, the floater is larger than the counter buoy (and exerts
larger forces). Therefore the counter buoy only moves upward when the cable on the
floater side is slack (which is on the downward floater motion).
54
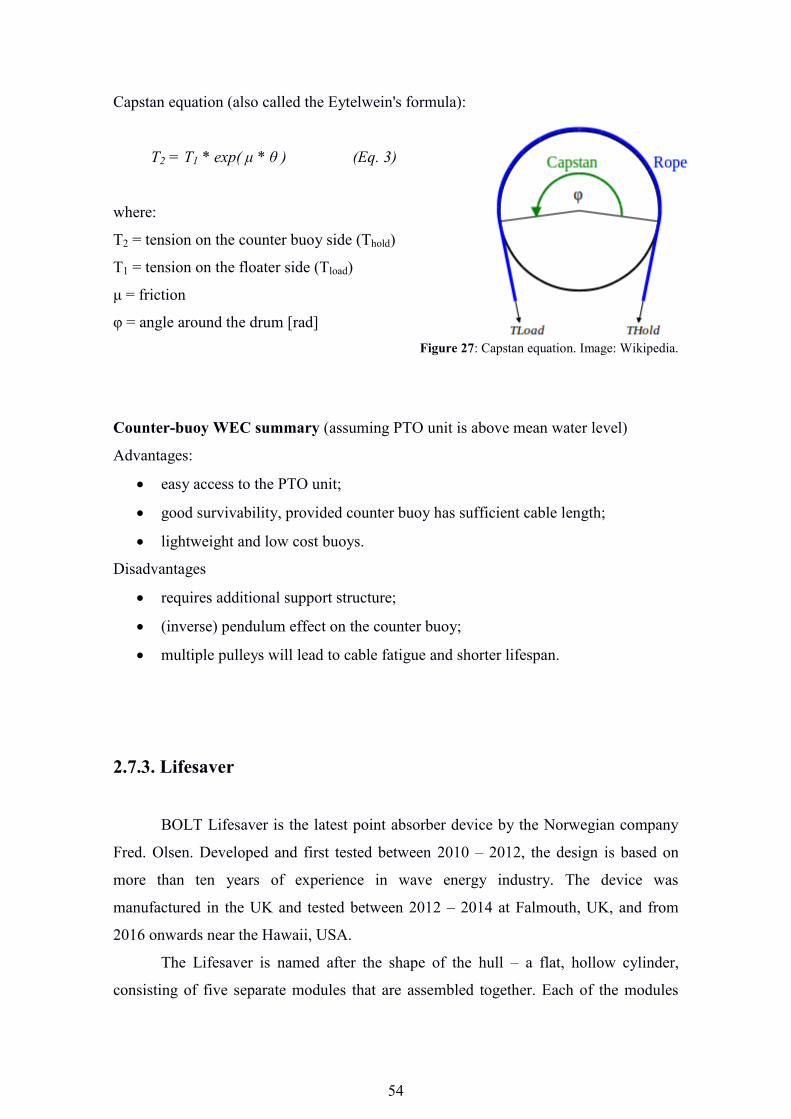
Capstan equation (also called the Eytelwein's formula):
T2 = T1 * exp( μ * θ ) (Eq. 3)
where:
T2 = tension on the counter buoy side (Thold)
T1 = tension on the floater side (Tload)
μ = friction
φ = angle around the drum [rad]
Figure 27: Capstan equation. Image: Wikipedia.
Counter-buoy WEC summary (assuming PTO unit is above mean water level)
Advantages:
easy access to the PTO unit;
good survivability, provided counter buoy has sufficient cable length;
lightweight and low cost buoys.
Disadvantages
requires additional support structure;
(inverse) pendulum effect on the counter buoy;
multiple pulleys will lead to cable fatigue and shorter lifespan.
2.7.3. Lifesaver
BOLT Lifesaver is the latest point absorber device by the Norwegian company
Fred. Olsen. Developed and first tested between 2010 – 2012, the design is based on
more than ten years of experience in wave energy industry. The device was
manufactured in the UK and tested between 2012 – 2014 at Falmouth, UK, and from
2016 onwards near the Hawaii, USA.
The Lifesaver is named after the shape of the hull – a flat, hollow cylinder,
consisting of five separate modules that are assembled together. Each of the modules

55
can carry a winch-based PTO system, including a drum, belt drive gearbox and a
motor/generator. In the latest prototype tested only three of the five PTO units are used,
with total power of 30 kW.
Figure 28: BOLT Lifesaver. Image: Fred.Olsen
Working principle
Similar to the previous devices, the Lifesaver is a heaving point absorber with
electromechanical PTO system. A relative motion between the floating body (the hull,
including all PTOs) and the seabed fixed moorings drives the rotation of the drums and
hence the generators. During the downward motion of the hull, generators act as motors
in order to rewind the drums and complete the cycle. Although this requires energy
input and hence decreases the overall efficiency of the WEC, using springs, counter
weight/buoy or hydraulic systems was found to make the device unnecessary complex,
less durable and more expensive. A guiding system is also present in order to negate the
effects of rolling or pitching and prevent cable entanglement or high lateral forces. Once
the energy is collected by the generators, it is transferred to a common DC-bus and then
to the grid. Additional battery bank serves as a long term storage to keep the system
running in the case of a calm sea. The device is equipped with a number of on-board
monitoring systems that deliver real time data and help maintenance and control.
However, the control and optimization of the drum motion in reaction to the ever-
changing sea state is still an issue.

56
Figure 29: Winch-based PTO. Image: Fred.Olsen.
Since BOLT Lifesaver is one of the first winch-based WECs so far in its
development, some of the components and mechanism had to be developed during the
design process. Examples of such are:
a several million bend cycles winch line developed in collaboration with Gates
Corporation between 2010 – 2016;
a high ratio, belt based gear box developed in collaboration with Gates
Corporation with the focus on low maintenance requirements, accessibility and
high corrosion resistance;
proprietary software based on the LabView software platform from National
Instruments.
Table 2: Sea state and device parameters.
Parameter Value Unit
Wave height 2.75 m
Wave period 6.5 s
Hull outer diameter 16 m
Hull inner diameter 10 m
Hull height 1 m
57
Hull dry weight 35 tones
Single PTO dry weight 3 tones
Buoyancy 1200 (total); 650 (available) kN
Lifesaver WEC summary
Advantages:
independent PTO units account for reliability and flexibility of maintenance;
simple rewinding system;
practically unlimited cable length allows for good survivability.
Disadvantages:
energy usage to rewind the drum hence lower efficiency;
control issues.
2.7.4. Aquaharmonics
“Aquaharmonics” is the name of the team that won the 2015 – 2016 US Wave
Energy Prize – an 18-month public design-build-test competition sponsored by the U.S.
Department of Energy. The main goal of the competition is to encourage the design of
efficient WEC devices which would be competitive on the energy market. The grand
price of $1.5 million attracted than 90 teams and provided ideas for improving
performance and reducing costs. “Aquharmonics” includes two engineers – Alex
Hagmuller and Max Ginsburg.
The working principle of the device is very similar to the Lifesaver – a heaving
buoy reacting against some mooring at the seabed through a pretensioned cable. The
vertical motion is converted to rotation with a horizontal drum, located in the buoy, and
then to electrical energy through a generator. Main focus of the design is the control
system. Starting from latching and declutching, the design evolved to “proportional
integral control, using coefficients based on the peak frequency of the wave spectrum –
the force demanded by the generator was the sum of a constant times velocity and a
constant times displacement” (Wave power conundrums, 2017). Although the WEC
operates with lower loads and hence produces less energy, lower CapEx and OpEx are a

58
significant advantage as well as greater survivability. Different modes of operation were
also available such as power capture or lower loads (in the case of harsh sea).
2.8. Environmental impact
For the purposes of this thesis, the environmental analysis will focus on WECs
classified as ‘point absorber’ - relatively small compared to wave length and located
offshore.
Wave energy is usually considered a clean renewable energy source. The limited
research done on environmental impact, however, combined with the short time that
WEC devices have been in use, only allows for partial description of possible
environmental effects.
In terms of environmental impact research, a few notable projects can be
mentioned: the WaveNet and the Coordinated action on ocean energy project (CA-OE).
WaveNet was carried out between 2000 and 2003 as a “European Commission
Thematic network to share understanding and information on the development of ocean
energy systems” (Wavenet, 2003). Including many European universities (in the UK,
Ireland, France, Sweden, Denmark, etc.), the study was one of the first to address
legislative, environmental and sustainability issues. The Coordinated action on ocean
energy project was carried out between October 2004 and December 2007, once again
supported and funded by the European Commission. Its main objectives include
developing R&D policies regarding WEC design, coordination of efforts in key projects
and collection and analysis of data from ocean energy systems in real seas.
Despite some effort that has been made to incorporate the WECs in coutry-level
legislations concerning coastal structures, shipping or electricity production, there are
few at the European union or international level. The lack of common guidelines at the
early stage of WEC development increases the possibility of conflict of interests as the
industry grows and allows for environmentally harmful use of the wave energy resource
and environment due to lack of knowledge or negligence. Hence extensive research and
monitoring should be undertaken.
There are a number of effects that a WEC can have on its immediate
surroundings. Those can vary in nature and severity during the installation, operation,
maintenance or decommissioning phase of the device life. The impact also depends on

59
the scale of the device – a prototype test, a single device, a small array or a wave energy
farm. Finally, along with the converter itself, all cables, moorings, energy hubs and
deployment/decommissioning ships affect the sea environment.
Environmental effect can be separated into three main areas:
Effect on abiotic system
Some larger WEC and especially wave energy farms may alter the water
currents and hence change the sediment deposition patterns. Large seabed fixed devices
or the moorings used for floating ones can also alter the seabed. The waves behind a
WEC have 10-15% lower wave height (Cruz, 2008), which can reduce coastal erosion
and interfere surfing. During the deployment and decommissioning phase increased
presence of ships may temporally increase the turbidity. Bad practices can pollute the
water with hydraulic and other oils.
Effect on biotic system
Seas are full of life – benthos, fish and marine mammals. These could be
attracted or displaced by the noise a WEC emits. Electromagnetism from high voltage
lines on seabed can affect the migration or feeding habits of some animals (Cruz, 2008).
On the other hand, floating WEC devices can serve as artificial nesting locations for sea
birds; bottom-fixed devices can act as artificial reefs; restricted fishing in the area can
help the local fish population serving as sanctuary for vulnerable species.
Some measures to mitigate negative impact include burying electricity cables in
order to decrease the electromagnetic radiation; observation of
installation/decommissioning phases by a marine life specialist who can delay the
disturbing works (usually high noise levels are present) in case there are sensitive
animals nearby; design of low-noise WECs, etc.
Effect on human activities
Fishing can be negatively impacted if the WEC devices occupy larger area.
WECs can visually impact tourism as the floating ones could be seen from the shore.
However, as the industry grows, wave energy can generate employment in many sectors
such as production and services. WECs can serve as guidance at night or they can be a
navigational hazard for shipping.

60
A major issue will be the conflict of uses – existing structures such as pipes can
be an obstacle for WECs; fishing or sand mining can be negatively affected if a wave
energy away or a farm are located in the area; surfing is directly affected due to the
reduction in wave height; the presence of biologically or historically important sites will
limit the available locations for WECs’ deployment.
Cruz (2008) summarizes the environmental impact of WECs in the following table:
Table 3: Environmental impact of WECs.
Actions Installation Operation Decommiss -
ioning
Environmental factors S C M D S C M D S C M D
Coastal processes x x x x x x x
Abiotic Water quality x x x x x x x x x x
Air quality x x x x
Benthos x x x x x
Fish x x x x x x x x x
Biotic Marine mammals x x x x x x x x x
Other aquatic fauna x x x x x
Marine birds x x
Flora x x x x x
Conflict of uses x x x x x x x x x x x x
Socioeconomic Cultural resources x x
Socio-eco x x x x x x
Visual x
Legend: S – ships; C – cables; M – moorings; D – device

61
2.9. Economy of WEC
According to Brooke (2003), the most accurate method of calculating energy
production cost, and hence being able to compare different devices, is using the US
Electric Power Research Institute Technical Assessment Guide (EPRI TAG ™). “The
cost of energy is computed by leveling a power plant’s annual revenue requirement over
the service life of the plant and dividing it by the plants’ annual output. If the energy
would be sold at this price, the total collected revenue would have the same present
value as the sum of all fixed charges and expenses paid out during the plants life,
allowing for discounting of future costs and revenues” (Brooke, 2003). Hence a single
term can be used to compare various designs, namely the “levelized” cost of energy.
The revenue requirement consists of 1. fixed charges and 2. variable costs and expenses.
The fixed charges do not depend on the amount of energy produced and include
construction, installation and regular maintenance of the device, power transmission
cables, staff payment, etc. The variable costs are directly related to the amount of
energy produced and can include consumable items such as filters, lubricants or fuel,
depending on the specific design. If sales exceed costs, the difference is considered a
profit and is subject to taxes. Important to note is that the majority of the costs are site
specific.
The wave energy industry is not yet mature and hence it could not be used as
costs data source (Brooke, 2003). This requires some mechanism to estimate the capital
costs of a WEC. Three commonly used are ‘costing by analogy’ approach, ‘bottom-up’
approach and the ‘parametric costing’ approach. The first uses average figures from
similar projects and adjusts them based on size, complexity, etc. In th case of a
relatively new ideas where analogs are hard to find, the use of this approach may be
limited. An alternative is the ‘bottom-up’ method: using the detailed drawings and
construction plans, a complete work breakdown is established. However, this method
can only be used when more detailed design has been created. Somewhere in between
these two is the ‘parametric costing’ method that uses functional relationship between
item characteristics (weight, size, etc.) and ts cost. Relationships are derived based on
past experience and an outline drawing is required as well as specifications and unit
rates for labour, transport, materials, etc.

62
In addition to WECs, some designs incorporate both wave and wind energy in
order to create more reliable devices and lower the energy prices.
The majority of WEC companies believe more research is required before wave
energy is ready to compete on the market (Sjolte, 2014). Similar to the wind energy
industry, however, wave energy economics has shown improvement over time.
Developing better understanding of the phenomenon as well as good practices and
manufacturing methods helps lower the capital and operational costs. Taking the
Lifesaver for example, the device was built as a prototype with the purpose of gaining
operational experience. Since little effort was made to optimize the device for low cost
energy production, there is huge potential for cost reduction. In table X are presented
the costs, based on a detailed design, of the current Lifesaver WEC and a next
generation device (Sjolte, 2014):
Table 4: Cost comparison between Lifesaver and the next generation device by FO.
Item Lifesaver Next
generation Unit
Floater 7.7 1.6 k€/kW
PTO 8 2.2 k€/kW
Mooring and auxiliary 7.6 2.1 k€/kW
Installation - 0.95 k€/kW
Operational cost 5.3 0.38 k€/(kW.yr)
Sum CapEx 23.3 5.9 k€/kW
Sum OpEx (NVP, 20 yr, 4%) - 5.2 k€/kW
Sum CapEx + OpEx - 11.1 k€/kW

63
3. Comparative analysis of winch-based PTO systems
3.1. Comparison criteria
WECs have been designed and improved for many years now and therefore a
great number of ideas are present. However, for financial or other reasons, not many of
those have reached the model testing stage. For example, this thesis considers three
distinct designs and only one of them (Lifesaver) has been built and tested
(Aquaharmonics WEC will not be analyzed further because of the early stage it is in;
and the similarity to Lifesaver). Since it is inefficient and financially challenging to
built and test every WEC design, a theoretical method for comparison and analysis must
be developed.
For the comparison criteria to be determined, it is important to define the goals a
WEC device aims to achieve. Once these are defined, a more detailed list of parameter
related to these goals can be created. These criteria could also be considered a starting
point for more specific design requirements.
The aim of the WECs is to produce reliable, low cost, clean energy from the
waves. Parameter that would affect the ‘cleanness’ could be the materials and methods
used for manufacturing, the presence of fuel, oils or exhaust gases. In terms of
reliability, the ability of the device to adapt to the changing conditions, its robustness
and survivability are important to account for. Factors affecting the cost are many,
including efficiency, mass, maintenance requirements, materials and manufacturing
methods, etc. The following list of criteria for comparison summarizes and extends the
points mentioned above:
WECs comparison criteria:
1. cost (per unit energy produced; for development and construction; for
installation, maintenance and decommissioning) ;
2. mass and dimensions (of the buoys, PTOs, any additional structures);
3. materials, manufacturing methods and availability of existing components;
4. robustness (device reaction to corrosion, fatigue, temperature change, etc.);
5. survivability (in extreme conditions);

64
6. design complexity and maintenance frequency requirement (are there multiple
components, moving parts, etc.);
7. efficiency (energy losses might occur in wave – mechanical/hydraulic
conversion as well as in mechanical – electrical conversion and transport);
8. adaptability to wave conditions (efficiency over a broad specter of wave
parameters);
9. environmental impact (see chapter 2.8).
These criteria are not equally important. For example, variation in efficiency,
design complexity and adaptability to wave conditions can be tolerated provided the
overall performance meets the desired goals. However, there might be legal, economic
or moral reasons that would restrict the freedom in terms of cost or environmental
impact.
3.2. Comparison and analysis of existing WECs
In order to select the best design, the considered devices are ordered best to
worst receiving 3, 2 or 1 points respectively for each of the comparison criteria. If there
is no undeniable winner for some of the criteria, 2 points will be allocated to either two
of the devices (where the third receivs 1 or 3 pts depending on its relative performance)
or to all three devices. ‘Coefficients of importance’ are based on the subjective
importance of each parameter (justification provided in Appendix 1); these coefficients
would be later multiplied by the allocated points to give the final score. Justification for
the decision is also provided.
Abbreviations
Counter weight device – CW;
Counter buoy device – CB;
BOLT Lifesaver – Ls;
Coefficient of Importance – C.o.I;
Weighted score – w.s. (score * C.o.I)

65
Table 5: Winch-based WECs comparison.
Criteria C.o.I CW CB Ls w.s.
CW
w.s.
CB
w.s.
Ls Justification
1 0.9 1 2 3 0.9 1.8 2.7
All devices require solid mooring; both CW
and CB require additional structure to be build;
CB uses relatively low cost buoys;
2 0.3 1 2 3 0.3 0.6 0.9
Ls only carries the PTO and the floater; in
addition, CB uses light buoys and CW uses
relatively large mass;
3 0.5 1 2 2 0.5 1 1
All devices require high load durable cables;
CW requires a specific bidirectional gearing
system;
4 0.9 2 2 1 1.8 1.8 0.9
All devices experience cable fatigue; CW and
CB are fixed to a structure above SWL and
could be better insulated from the sea water;
5 1 2 2 3 2 2 3
CW and CB experience the (inverse) pendulum
effect which limits their survivability;
meanwhile, Ls could have practically infinite
cable length
6 0.5 2 2 3 1 1 1.5
CW (PSG) and CB (multiple pulleys and
capstan) have rather complicated machinery;
Ls uses the generator which simplifies the
design;
7 0.8 3 2 1 2.4 1.6 0.8 CW utilizes energy production bidirectionally;
Ls uses energy to wind up the drum;
8 0.9 2 2 3 1.8 1.8 2.7
Regulation of the mass or buoyancy in CW and
CB is an option; however, the direct link
between the motor and the cable gives Ls an
advantage;
9 0.6 2 2 3 1.2 1.2 1.8
The installation and presence of the large
structures, required by CW and CB, will affect
the environment more compared to the Ls.
Final scores: 11.9 12.8 15.3

66
The result of the comparison shows that the Lifesaver is the best of the
compared designs. A design guide is available on the Bolt wave Power website and a
summarized version is presented in Appendix 2.
Results
Following the comparison, some key points have been identified:
All devices are prone to cable fatigue issues;
All devices use unconventional gear systems which is likely increase the overall
cost;
Both counter weight and counter buoy have a similar problem with balancing
between the pendulum effect and survivability in harsh sea;
Due to either support structure construction or underwater installation and
maintenance, the counter buoy design would most likely be commercially
inefficient;
Lifesaver trades energy production for simpler design and avoids drum rewind
issues such as pendulum effect, hydraulic leaks or spring wear;
Provided enough cable is present on the drum, Lifesaver has the best chances to
survive the hundred year wave (a hypothetical wave with greater wave height
and energy, appearing once every 100 years)
Lifesaver has been tested and developed for more than 5 years which ensures
well-thought design and less unexpected complications;
Hence, Lifesaver is currently the best winch-based PTO design – a buoy, moored to the
seabed, a drum-based PTO and a motor/generator with electrical hub to store the
produced energy.

67
4. Conclusion and future work
The thesis shows that the light and simple design of the Lifesaver is the right
way for future winch-based systems. The lack of heavy structures allows for cheaper
construction and installation; the compact and versatile PTO is the perfect alternative to
mass-, spring- or hydraulic-based energy storage. Compared to linear systems, the end-
stop problem is eliminated and survivability in severe storms is enhanced; the linear
generator is replaced by the more efficient rotary generator; the structure is lighter. No
matter the type of the device, however, wave energy has been an inspiring field of
research for many years and surely has its place in the future energy market.
In terms of winch-based devices, further research in computer-based wave
modeling will allow for better understanding of the devices’ behavior and hence for
optimal design. New rotary generators, adaptable to the low frequency wave
oscillations, or alternatives, such as the piezoelectric systems, should be developed. A
common system for classification and comparison of WECs will make it easier for
investors to choose the appropriate project. Further investigation on the specifics of the
the design requirements, such as cost evaluation, environmental impact, material and
manufacturing choice and design complexity and maintenance solutions will greatly
affect the performance, lifespan and cost of the future WECs.

68
5. Bibliography
[1] Baris, Y., Lema, E., Stavrakakis, P., “Wave energy utilization technologies and
exploration of energy resources potentials in the Aegean Sea”
[2] Brooke, J., 2003, “Wave energy conversion” (Oxford: Elsevier Ltd)
[3] BOLT Lifesaver system, 2016. Boltwavepower. [Online]. Available at:
http://www.boltwavepower.com/?nid=349855&lcid=1033 [Accessed March
2017]
[4] Clément, A., McCullen, P., Falcão, A., Fiorentino, A., Gardner, F.,
Hammarlund, K., Lemonis, G., Lewis, T.,Nielsen, K., Petroncini, S., Pontes,
M.T., Schild, P., Sjöström, B.O., Sørensen, H.C., Thorpe, T., 2002, “Wave
energy in Europe: current status and perspectives”, Renewable and Sustainable
Energy Reviews 6, pp 405–431
[5] Cruz, J., 2008, “Ocean wave energy. Current status and future perspectives”
(Bristol: Garrard Hassan and Partners Ltd.)
[6] Diagram to explain the capstan equation, 2012. [Online.] Wikipedia. Available
at:
https://en.wikipedia.org/wiki/Capstan_equation#/media/File:Capstan_equation_
diagram.svg [Accessed April 2017]
[7] Drew, B., Plummer, A.R. and Sahinkaya, M.N., 2009, “A review of wave
energy converter technology”, Proc. IMechE Vol. 223, Part A: J. Power and
Energy, pp 887 – 902
[8] Duckers, L., 2004, “Wave energy. In Renewable energy” (Ed. G.Boyle), 2nd
edition, ch. 8 (Oxford: Oxford University Press)
[9] Du Plessis, J., 2012, “A hydraulic wave energy converter”, MSc Thesis
(University of Stellenbosch)
[10] Energy harvesting journal by IDTechEx, 2017. [Online].
AquaHarmonics wins wave energy prize. Availeble at:
http://www.energyharvestingjournal.com/articles/10286/aquaharmonics-wins-
wave-energy-prize [Accessed March 2017]
[11] Falcão, A.F.O., 2014, “Modelling of wave energy conversion”
(Technical university of Lisbon)

69
[12] Falnes, J., 2007, “A review of wave-energy extraction”, Marine
Structures, Vol. 20(4), pp 185–201
[13] Foster, J.W., Ghorbani, R., Garambois, P., Jonson, E. and Karlsson, S.,
2011, “Development of a Low Cost Point Absorber Wave Energy Converter for
Electric Mobility”, World renewable energy congress 2011 – Sweden, Marine
and ocean technology (MO), pp 2278 – 2285
[14] Fred.Olsen Autonomous Sea Power, 2017. [Online]. Available at:
http://autonomousseapower.com/ [Accessed April 2017]
[15] Friis-Madsen, E., 2008. “Over topping principle of Wave Dragon”.
[Online]. Available at:
https://en.wikipedia.org/wiki/Wave_Dragon#/media/File:WD_side_princip.JPG
[Accessed April 2017]
[16] Gunawardane, S.P., Kankanamge, C.J. and Watabe, T., 2016, “Study on
the Performance of the “Pendulor” Wave Energy Converter in an Array
Configuration”, Energies, Vol 9(4), 282 (MDPI)
[17] Han S.H., Jo, H.J., Lee, S.J., Hwang, J.H. and Park, J.W., 2016,
“Experimental Study on Performance of Wave Energy Converter System with
Counterweight”, Journal of Ocean Engineering and Technology, Vol 30(1)
[18] Korde, U.A., 2000, “Control system applications in wave energy
conversion”, IEEE Conference and Exhibition, Proc. OCEANS 2000 MTS, vol.
3.
[19] Lenné, D., 2007, “Wells turbine”. [Online]. Available at:
https://en.wikipedia.org/wiki/Wells_turbine#/media/File:Wells_turbine_en.svg
[Accessed April 2017]
[20] Matsuda, H., Watanabe, R., Azuma, S., Tanaka, Y. and Doi, Y., 2013,
“Ocean power generator using flexible piezoelectric device”, 32nd International
Conference on Ocean, Offshore and Arctic Engineering, Proc. ASME
[21] McCormick M.E., 1981, “Ocean wave energy conversion” (New York:
Wiley)
[22] Munk, W.H., 1950, "Origin and generation of waves". Proceedings 1st
International Conference on Coastal Engineering, Long Beach, California.
ASCE, pp. 1–4
[23] Ocean Atlas, 2010, Advantages and Disadvantages of Wave Energy.
[Online]. Available at: http://www.oceansatlas.com [Accessed: 26 May 2010]

70
[24] The Pelamis Prototype machine at EMEC, Orkney, Scotland, 2007.
[Online]. Wikipedia. Available at:
https://en.wikipedia.org/wiki/Pelamis_Wave_Energy_Converter#/media/File:Pel
amis_at_EMEC.jpg [Accessed April 2017]
[25] Rodrigues, L., 2008, “Wave power conversion systems for electrical
energy production”, Renewable Energies and Power Quality Journal, Vol. 1,
No.6
[26] Ross, D., 1995, “Power from sea waves” (Oxford: Oxford University
Press)
[27] Salter S.H., 1974, “Wave power”, Nature, 249:720-4.
[28] Sjolte, J., 2014, “Marine renewable energy conversion. Grid and off-grid
modeling, design and operation”, PhD Thesis (Norwegian University of Science
and Technology)
[29] Tanaka, Y., Oko, T., Mutsuda, H., Patel, R., McWilliam, S. and Popov,
A.A., 2015, “An Experimental Study of Wave Power Generation Using a
Flexible Piezoelectric Device”, Journal of Ocean and Wind Energy, Vol. 2 (1),
pp. 28–36
[30] Wave energy prize, 2017. [Online]. Available at:
https://waveenergyprize.org/about [Accessed March 2017]
[31] Wave power conundrums, 2017. Garage Harmony. [Online]. Available
at: http://www.wavepowerconundrums.com/2016/12/garage-
harmony.html#more [Accessed March 2017]
[32] WaveNet, 2003,”Results from the work of the European Thematic
Network on Wave Energy” , E.E.S.D.
[33] WaveStarEnergy, 2017. [Online]. Available at:
http://wavestarenergy.com/details [Accessed April 2017]
[34] Zurkinden, A.S., Campanile, F. and Martinelli, L., 2007, “Wave Energy
Converter through Piezoelectric Polymers”, COMSOL Users Conference

71
Appendix 1
Coefficients of importance
To the criteria selected to compare the WECs were allocated coefficients that
would be a sign of how important those criteria are in the design process. These
coefficients were subjectively selected based on the author’s thoughts and experience.
The criterion with the highest priority (coefficient of 1.0) is the survivability –
how well the device handles harsh conditions. It would not matter how efficient or
durable a device is, if it only operates until the next storm. Right after (0.9) are cost,
robustness and adaptability to wave conditions. Provided that the WEC are trying to
deliver energy for a land-based consumer, the devices will compete with all other
energy sources such as fossil fuels, wind and nuclear power, which are all ahead in their
development and hence can offer lower prices. Robustness is important due to the
constant effect that the elements have on the device – salty and acidic sea water, solar
radiation (some plastics might alter their properties under UV light) and frequent loads.
A need for constant maintenance would increase the overall cost of a device because of
both materials , repair works and travel. Adaptability to wave conditions refers to the
bandwidth of operation of the device. This is essential due to the time- and location-
based variation of the wave parameters. In the case of a very narrow operational
bandwidth, the WEC is practically working in a fraction of the time hence producing
less energy. Next (0.8) is the efficiency of a device. The efficiency determines what
percentage of the available energy will reach the end consumer. Losses may occur
anywhere in the system, from the PTO to the transport power cables and will affect the
overall cost. Environmental impact (0.6) should be an important design criteria because
one of the main points for wave energy advocates its cleanness. Replacing fossil fuels
with devices that poison the oceans is an expensive enterprise with no actual benefit.
Additionally, a harmful WEC may provoke legal or social reaction. Design complexity
and building issues (materials, manufacturing and components) were placed towards the
end of the list (0.5) because if the device performs generally good enough, it is of little
importance to the consumer how complicated it is or how was it made. In terms of
design, however, the lack of certain mechanisms or components (such as a specific

72
gearbox or a cable) may require additional time and effort. On the other side, if a WEC
is build using existing components the cost and maintenance quality will be at better.
Finally, the size (0.3) of a WEC will affect construction and maintenance costs as well
as the environmental impact. However, as point absorbers are relatively small devices
(compared to the shore-based OWC) and are located offshore, provided good overall
performance, mass and dimensions are not an issue.
Criticism
The determination of both C.o.I values and the scores are highly subjective; the
rating system allows for unclarity about the distance in quality between 1st, 2
nd and 3
rd
place. The ‘undeniable winner’ rule attempts to account for that, however, as C.o.I are
multiplied there is another issue – the difference between 1/2/2 and 2/2/3 will grow
proportionally with the C.o.I.

73
Appendix 2
Fred. Olsen design guidelines
On their website (BOLT Lifesaver system), Fred. Olsen have posted a list of
‘rules’ to be followed during the WEC design process. The years of experience with
their previous devices are summarized as follows:
1. As a first cost reduction step all structures that are not required for energy
production should be removed (such as support);
2. Devices should be light-weight in order to reduce ballast and submerged mass
(moorings) costs;
3. Following the rules above, the company advices against multi-body floating
systems (such as heave plates) where passive bodies will add inactive mass;
4. Similarly to additional mass, all moorings should be included in the energy
extraction process (provided the system behavior is fully understood);
5. The company advices against the use of hydraulic PTOs due to unsatisfactory
cost, efficiency and controllability as well as limited ability for filtering
unwanted behavior of the system;
6. Device stroke length should be unlimited to allow for greater wave heights and
eliminate the end stop problem;
7. The company advices against subsurface devices since the submersion
complicates design and maintenance;
8. As WEC are rather complex devices, reliability and durability should come
before maximizing energy production.
Even though the list above is limited to one company’s experience only, Fred. Olsen
have been testing various designs, including bottom fixed multi-body system, a floating
point absorber, hydraulic and electric PTOs, etc.