comparative survey on non linear filtering methods : the quantization and the particle filtering...
Post on 21-Dec-2015
215 views
TRANSCRIPT

Comparative survey on non linear filtering methods : thequantization and the particle filtering approachesAfef SELLAMI
Chang Young Kim

Overview
Introduction Bayes filters Quantization based filters
Zero order scheme First order schemes
Particle filters Sequential importance
sampling (SIS) filter Sampling-Importance Resampling(SIR) filter
Comparison of two approaches Summary

Non linear filter estimators Quantization based filters
Zero order scheme First order schemes
Particle filtering algorithms: Sequential importance sampling (SIS) filter Sampling-Importance Resampling(SIR) filter

Overview
Introduction Bayes filters Quantization based filters
Zero order scheme First order schemes
Particle filters Sequential importance
sampling (SIS) filter Sampling-Importance Resampling(SIR) filter
Comparison of two approaches Summary

Bayesian approach: We attempt to construct the πnf of
the state given all measurements.
Prediction
Correction
Bayes Filter

One step transition bayes filter equation
By introducint the operaters , sequential definition of the unnormalized filter πn
Forward Expression
Bayes Filter

Overview
Introduction Bayes filters Quantization based filters
Zero order scheme First order schemes
Particle filters Sequential importance
sampling (SIS) filter Sampling-Importance Resampling(SIR) filter
Comparison of two approaches Summary

Quantization based filters
Zero order scheme First order schemes
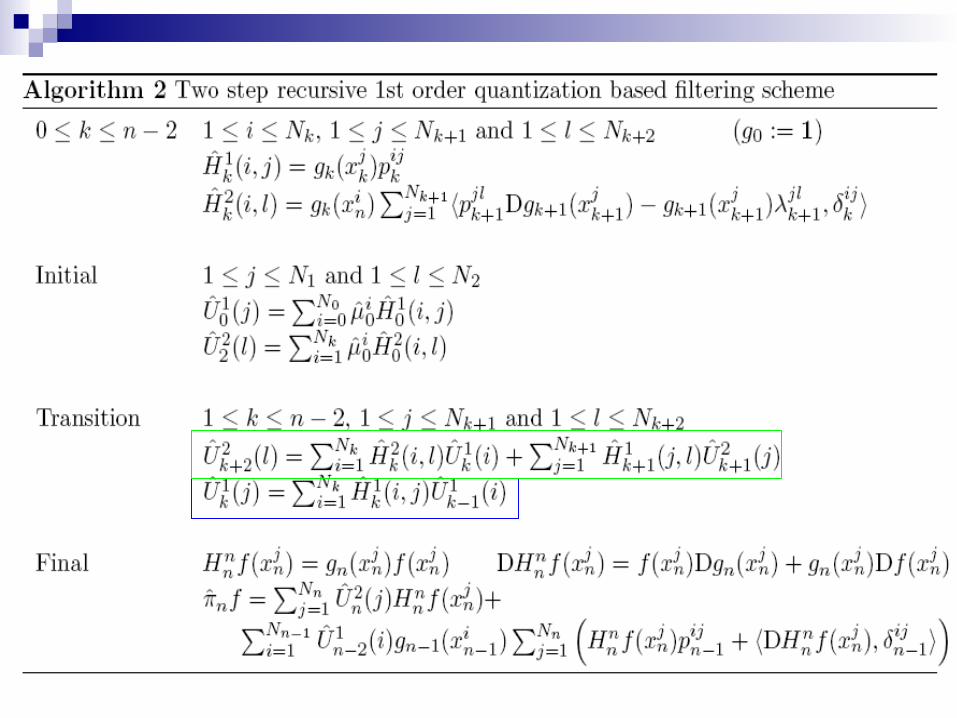
One step recursive first order scheme Two step recursive first order scheme

Zero order scheme
Quantization
Sequential definition of the unnormalized filter πn
Forward Expression

Zero order scheme

Recalling Taylor Series
Let's call our point x0 and let's define a new variable that simply measures how far we are from x0 ; call the variable h = x –x0.
Taylor Series formula
First Order Approximation:

Introduce first order schemes to improve the convergence rate of the zero order schemes.
Rewriting the sequential definition by mimicking some first order Taylor expansion:
Two schemes based on the different approximation by
One step recursive scheme based on a recursive definition of the differential term estimator.
Two step recursive scheme based on an integration by part transformation of conditional expectation derivative.
First order schemes

One step recursive scheme The recursive definition of the differential term estimator
Forward Expression


Two step recursive scheme
An integration by part formula
where
where

Comparisons of convergence rate
Zero order scheme
First order schemes One step recursive first order scheme
Two step recursive first order scheme

Overview
Introduction Bayes filters Quantization based filters
Zero order scheme First order schemes
Particle filters Sequential importance
sampling (SIS) filter Sampling-Importance Resampling(SIR) filter
Comparison of two approaches Summary
Particle filtering
Consists of two basic elements:Monte Carlo integration
Importance sampling
limL ! 1
LX
`=1
w`f (x`) =Zf (x)p(x)dx
p(x) ¼LX
`=1
w`±x`

Importance sampling
Proposal distribution:
easy to sample from Original
distribution: hard to
sample from, easy to
evaluate
Ex [f (x)] =Zp(x)f (x)dx
=Z
p(x)q(x)
f (x)q(x)dx
¼1L
LX
`=1
p(x`)q(x`)
f (x`)
Importanceweights
x` » q(¢)
wl=p(x`)q(x`)

we want samples from
and make the following importance sampling identifications
Sequential importance sampling (SIS) filter
Proposal distribution
Distribution from which we want to sample
1 1 1( ) ( | ) ( | ) ( )t t t t t t tBel x p y x p x x Bel x dx
1 1( ) ( | ) ( )t t tq x p x x Bel x ( ) ( )tp x Bel x

draw xit1 from Bel(xt1)
draw xit from p(xt | xi
t1)
Importance factor for xit:
1 1
1 1
( )
( )
( | ) ( | ) ( )
( | ) ( )
( | )
it
t t t t t
t t t
t t
p xw
q x
p y x p x x Bel x
p x x Bel x
p y x
1 1 1( ) ( | ) ( | ) ( )t t t t t t tBel x p y x p x x Bel x dx SIS Filter Algorithm

Sampling-Importance Resampling(SIR)
Problems of SIS:
Weight Degeneration
Solution RESAMPLING
Resampling eliminates samples with low importance weights and multiply samples with high importance weights
Replicate particles when the effective number of particles is below a threshold
2
1
1
( )eff n
ik
i
Nw

Sampling-Importance Resampling(SIR)
( )1
1
1,
ni
ki
xn
x
( ) ( )
1,
ni ik k i
x w
( )1
1
1,
ni
ki
xn
( ) ( )1 1 1,
ni ik k i
x w
( )2
1
1,
ni
ki
xn
Sensor model
Update
Resampling
Prediction

Overview
Introduction Bayes filters Quantization based filters
Zero order scheme First order schemes
Particle filters Sequential importance
sampling (SIS) filter Sampling-Importance Resampling(SIR) filter
Comparison of two approaches Summary

Elements for a comparison
Complexity Numerical performances in three state
models:Kalman filter (KF)Canonical stochastic volatility model (SVM)Explicit non linear filter

Complexity comparison
Zero order scheme C0N2
One step recursive first order scheme
C1N2d3
Two step recursive first order scheme
C2N2d
SIS particle filter C3N
SIR particle filter C4N

Numerical performances
Three models chosen to make up the benchmark.Kalman filter (KF)Canonical stochastic volatility model (SVM)Explicit non linear filter

Kalman filter (KF)
Both signal and observation equations are linear with Gaussian independent noises.
Gaussian process which parameters (the two first moments) can be computed sequentially by a deterministic algorithm (KF)

Canonical stochastic volatility model (SVM) The time discretization of a continuous diffusion model.
State Model

Explicit non linear filter
A non linear non Gaussian state equation Serial Gaussian distributions SG()
State Model

Numerical performance Results Convergence tests
three test functions:
Kalman filter: d=1

Numerical performance Results : Convergence rate improvement
<Regression slopes on the log-log scale representation (d=3)>
Kalman filter: d=3

Numerical performance Results Stochastic volatility model
<Particle filter for large particle sizes (N = 10000) and quantization filter approximations for SVM as a function of the quantizer size>

Numerical performance Results Non linear explicit filter
<Explicit filter estimators as function of grid sizes >

Conclusions Particle methods do not suffer from dimension
dependency when considering their theoretical convergence rate, whereas quantization based methods do depend on the dimension of the state space.
Considering the theoretical convergence results, quantization methods are still competitive till dimension 2 for zero order schemes and till dimension 4 for first order ones.
Quantization methods need smaller grid sizes than Monte Carlo methods to attain convergence regions