departamento de engenharia electrotécnica e de ...14... · departamento de engenharia...
TRANSCRIPT
Prof. Carlos R. Paiva
Departamento de Engenharia Electrotécnica e de Computadores
Instituto Superior Técnico
Maio de 2008
1Álgebra Geométrica do Espaço: Introdução
At first sight it may seem absurd to add two directed numbers with different grades.
That may have delayed Grassmann from considering it. For centuries the notion that
you can only add “like things” has been relentlessly impressed on the mind of every
schoolboy. It is a kind of mathematical taboo – its real justification unknown or
forgotten. It is supposedly obvious that you cannot add apples and oranges or feet and
square feet. On the contrary, it is only obvious that addition of apples and oranges is
not usually a practical thing to do – unless you are making a salad.
David Hestenes†
1. Vectores, produto geométrico e bivectores Estes apontamentos destinam-se a fazer uma breve introdução à álgebra geométrica do
espaço ordinário tridimensional radicada no espaço linear 3 . Designaremos por 3C
esta álgebra geométrica. Comecemos por considerar um vector 3∈r . O seu
comprimento é dado pelo respectivo módulo r . Tem-se, usando a métrica euclidiana
associada ao produto interno habitual,
23métrica euclidiana de → = ⋅r r r .
† New Foundations for Classical Mechanics, Kluwer Academic Publishers, Dordrecht, 2nd ed., p. 30, 1999.

Carlos R. Paiva 2
O nosso ponto de partida é o seguinte: pretende-se introduzir um novo produto entre
vectores – a que chamaremos produto geométrico – que permita recuperar 2r . Como
notação a adoptar far-se-à ( ) 2, =r r r r r , i.e., não se utiliza qualquer espécie de
símbolo para designar este novo produto.
Axioma básico: Considera-se, por definição,
22produto geométrico → = = ⋅ =r r r r r r .
Não impondo, à partida, qualquer restrição algébrica no que respeita à comutatividade
do novo produto, façamos = +r a b com 3, ∈a b . Virá então
( )( )( ) ( ) ( )
2 2 2
2 22 2
= = + + = + + +
= ⋅ = + ⋅ + = + + ⋅
r r r a b a b a b ab ba
r r r a b a b a b a b
pelo que, atendendo a que 22 =a a e 22 =b b , se infere
( )relação entre o produto 1
interno e o produto geométrico 2α→ ⋅ = + = ∈a b ab ba
respeitando-se, deste modo, a simetria inerente ao produto interno, i.e., ⋅ = ⋅a b b a .
Exercício: Mostre que, se α ∈ e 3, , , ∈a b c x , então a solução da equação
( )α + ⋅ =x x a b c
é o vector
1α α
⋅⎛ ⎞= −⎜ ⎟+ ⋅⎝ ⎠c ax c b
a b.

3Álgebra Geométrica do Espaço: Introdução
Exemplo: Vejamos, desde já, uma aplicação geométrica deste resultado. Consideremos
o triângulo da Fig. 1 como sendo a expressão da soma vectorial 0+ + =a b c . Então
, ,a b c= = =a b c
( )( )
( )
2 2 2
2 2 2
2
lei dos2 cos
co-senosc a b ab γ
= − +
= + + ⋅
→ = + −
c a b
c a b a b
Um caso particular desta lei da trigonometria plana corresponde ao teorema de
Pitágoras: 2 2 22 c a bγ π= ⇒ = + .
Exemplo: Mostremos que o ângulo inscrito numa semi-circunferência é um ângulo recto
(Fig. 2). Note-se que basta, para esse efeito,
mostrar que o vector −b a é ortogonal ao vector
−b c , i.e., que ( ) ( ) 0− ⋅ − =b a b c .
( ) ( ) ( ) ( )
2 2
0
− ⋅ − = − ⋅ += −=
b a b c b a b ab a
É portanto possível, desde já, definir o inverso do vector r que se designará por 1−r .
Com efeito, sendo r̂ o correspondente vector unitário, tem-se
β γ
α
a
b
c
Figura 1 Triângulo correspondente à
soma vectorial 0+ + =a b c .
a c
b
Figura 2 O ângulo inscrito numa
semi-circunferência é recto.

Carlos R. Paiva 4
12
2
ˆˆ
inverso de um vectorˆ 1
−
⎧ =⎪⎪→ ⇒ = =⎨⎪ =⎪⎩
rrr r rr
r rr.
Tentemos, agora, averiguar qual a verdadeira natureza do resultado do produto
geométrico entre dois vectores 3, ∈a b .
( ) ( )1 1produto geométrico2 2
u
α
→ = = + + −ab ab ba ab ba
B
O primeiro termo α = ⋅ ∈a b é conhecido: trata-se de um escalar pertencente ao corpo
onde o espaço linear 3 está definido. O segundo termo, resultado de uma nova
operação – designada produto exterior (não confundir com produto externo) –
( )1produto exterior2
→ = ∧ = −B a b ab ba
é, por enquanto, de natureza desconhecida. Adopta-se a notação = ∧B a b para designar
o produto exterior de dois vectores. No entanto é óbvio que
( )1anti-simetria2
→ ∧ = − = − ∧ = −b a ba ab a b B
donde decorre imediatamente que
0∧ = − ∧ ⇒ ∧ =a a a a a a .
Definamos, agora, o reverso do objecto (por enquanto não identificado) u = ab e que
designaremos por u = ba (trata-se do produto geométrico dos mesmos dois vectores
mas em ordem inversa). Tem-se, portanto, sucessivamente

5Álgebra Geométrica do Espaço: Introdução
uu= = ⋅ + ∧ ⇒ ∧ = − ⋅= = ⋅ − ∧ ⇒ ∧ = ⋅ −
ab a b a b a b ab a bba a b a b a b a b ba
( )( ) ( )( )
( )( )( )
( )
2
2
2 22
= ∧ ∧ = − ⋅ ⋅ −
∴= ⋅ + − ⋅ −
⋅
B a b a b ab a b a b ba
a b ab ba a b abbaa ba b
( ) ( )2 22 2 2= ∧ = ⋅ −B a b a b a b .
Mas, em 3 , existe uma interpretação geométrica para o produto interno em termos do
ângulo ( ),θ = a b .
( )
( ) ( )2 3 2 222 2 2 2
cossignificado de em sin 0
θ
θ
⋅ =→
= ⋅ − = − ≤
a b a bB B a b a b a b
Como, quando 0θ ≠ , se tem 2 0<B , infere-se que o objecto geométrico B não pode
ser nem um escalar nem um vector. É um objecto de tipo novo que designaremos por
bivector e que resulta do produto exterior de dois vectores.
Conclusão importante: Em 3 o quadrado de um bivector é sempre um número
negativo. O bivector nulo, para 0θ = , é um caso trivial cujo quadrado é também nulo.
23
produto geométrico multivector
notação produto interno escalar
produto exterior bivector
α
→ = ⋅ + ∧ →
→ → ⋅ = ∈ →
→ ∧ = ∈ →
ab a b a b
a b
a b B ∧
( )área de um paralelogramo sinβ θ→ = =B a b
Assim β representa a área do paralelogramo da figura anexa. Podemos portanto
concluir que o bivector B codifica um plano orientado cuja área é dada por β .
Carlos R. Paiva 6
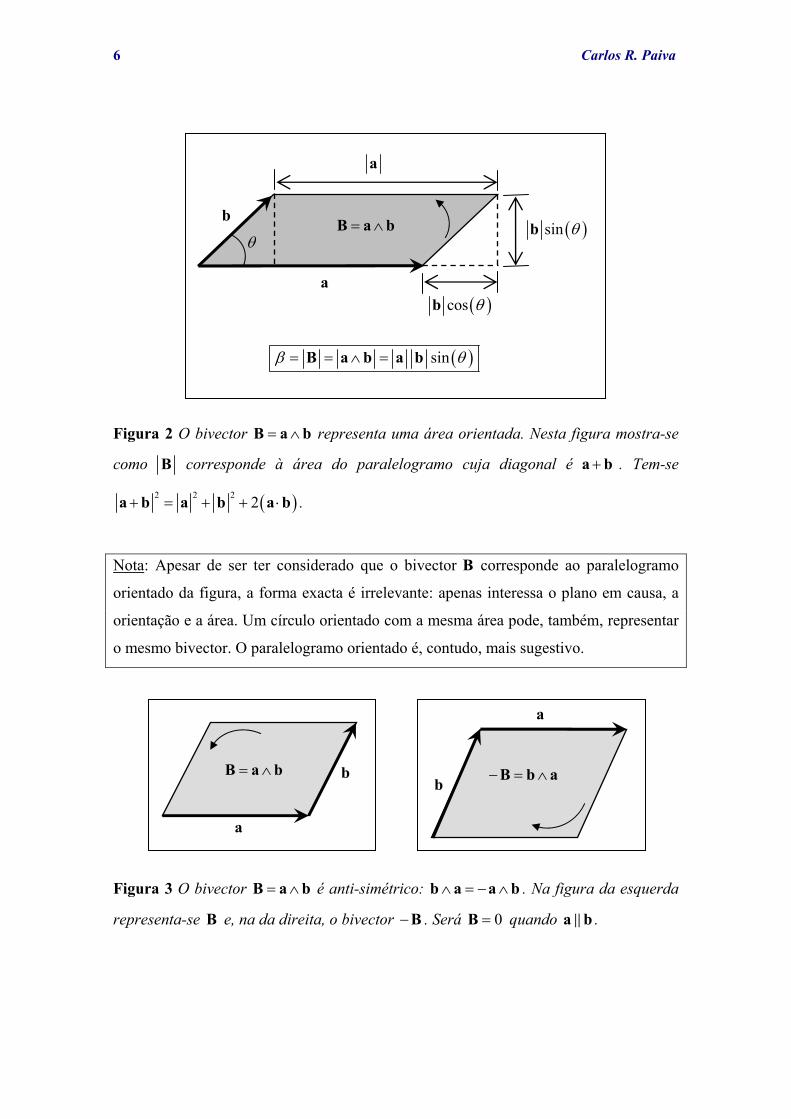
Figura 2 O bivector = ∧B a b representa uma área orientada. Nesta figura mostra-se
como B corresponde à área do paralelogramo cuja diagonal é +a b . Tem-se
( )2 2 2 2+ = + + ⋅a b a b a b .
Nota: Apesar de ser ter considerado que o bivector B corresponde ao paralelogramo
orientado da figura, a forma exacta é irrelevante: apenas interessa o plano em causa, a
orientação e a área. Um círculo orientado com a mesma área pode, também, representar
o mesmo bivector. O paralelogramo orientado é, contudo, mais sugestivo.
Figura 3 O bivector = ∧B a b é anti-simétrico: ∧ = − ∧b a a b . Na figura da esquerda
representa-se B e, na da direita, o bivector −B . Será 0=B quando a b .
θ
a
b
a
( )cos θb
( )sin θb = ∧B a b
( )sinβ θ= = ∧ =B a b a b
a
b= ∧B a b b − = ∧B b a
a

7Álgebra Geométrica do Espaço: Introdução
Assim como foi possível definir o inverso de um vector, é agora possível introduzir o
inverso de um bivector B que se designará por 1−B . Sendo B̂ o correspondente
bivector unitário, tem-se
12
2
ˆˆ
inverso de um bivectorˆ 1
−
⎧ =⎪⎪→ ⇒ = = −⎨⎪ = −⎪⎩
BBB B BB
B BB.
Nota importante: Este resultado mostra que 1−B tem a orientação oposta à de B .
Fica, assim, clarificada a natureza do objecto u = ab que será designado (como, de
resto, qualquer elemento genérico da nossa álgebra 3C ) por multivector: trata-se da
soma (graduada) de um escalar com um bivector.
soma graduada
multivectorescalar bivectorproduto
geométrico
u→ = = ⋅ + ∧ab a b a b
3ˆ ˆu C
αα β
β⎧ = ⋅∧ ⎪= → ⇒ = = + ∈⎨ = ∧∧ ⎪⎩
a ba bB ab Ba ba b
1
1
invertibilidade doproduto geométrico
uu
u
−
−
=→ = ⇒
=a b
abb a
Assim, é possível calcular facilmente 1u− para u = ab . Vem
( )( )1 1 1 1
1
1u u u u uu
− − − −
−
= ⇒ = ⇒ =ab b a b a
1 1 12 2 2 2u− − − ⋅ − ∧
∴ = = =ba a b a bb a
a b a b.

Carlos R. Paiva 8
Podemos introduzir a operação projecção de grau r de um multivector 3u C∈ e
designar o respectivo resultado por r
u .
( )( )
00 2
2
escalar grau zerobivector grau dois
uu u u
uα⎧ → = = ⋅⎪= = + → ⎨ → = = ∧⎪⎩
a bab
B a b
Nota: O produto interno diminui o grau dos vectores intervenientes (objectos de grau
um) para o grau zero uma vez que dá origem a um escalar. O produto exterior, por sua
vez, eleva o grau ao produzir um objecto de grau dois (um bivector).
Dados dois multivectores 3,u v C∈ , a respectiva soma deve respeitar a estrutura
graduada de cada um dos intervenientes.
( ) ( )1 1 11 2 1 1 2 1
2 2 2
ˆˆ ˆ
ˆescalar bivector
uu v
v
α βα α β β
α β
= +⇒ + = + + +
= +
BB B
B
0 0 0
2 2 2
u v u vu v u v+ = +
∴+ = +
Numa base ortonormada { }1 2 3, ,e e e do espaço linear 3 , tem-se
1,
delta de Kronecker0,i j i j
i ji j
δ=⎧
→ ⋅ = = ⎨ ≠⎩e e
pelo que
i j i j i j i j i j
j i j i j i i j i j
δδ
= ⋅ + ∧ = + ∧= ⋅ + ∧ = − ∧
e e e e e e e ee e e e e e e e
3 2base ortonormada de
2i j j i i j
i j j i i j
δ+ =→
− =e e e ee e e e e
onde se fez

9Álgebra Geométrica do Espaço: Introdução
convenção i j i j→ = ∧e e e .
Exemplo: Consideremos o caso de 12 1 2= ∧e e e . Vem sucessivamente
12 1 2 1 2 1 2 1 2
0= ∧ = ⋅ + ∧ =e e e e e e e e e
2
12 2 1 2 2 1 2 12
2 12 2 1 2 2 2 1 2 1 1
= = =∴
= = − = − = −e e e e e e e ee e e e e e e e e e e
( ) ( )2 22 2 212 1 2 1 2 1 2 1= ∧ = ⋅ − = −e e e e e e e .
●
A invertibilidade do produto geométrico tem uma clara interpretação geométrica.
Suponhamos, em tudo o que se se segue, que o vector 3∈a é um vector conhecido.
Consideremos, em primeiro lugar, que também se conhece o escalar α ∈ tal que
α⋅ =r a , sendo r um vector qualquer desde que satisfaça esta equação. Então, fazendo
α = ⋅b a , vem ainda ( ) 0− ⋅ =r b a . Facilmente se verifica que o afixo dos possíveis
vectores r que observam esta equação se encontra no plano π (visto de perfil) na Fig. 4.
Isto significa que o vector r , tal que α⋅ =r a , não fica caracterizado univocamente:
qualquer ponto em π é solução deste primeiro problema.
Figura 4 O plano π é o lugar geométrico
dos afixos dos vectores r tais que α⋅ =r a ,
i.e., tais que ( ) 0− ⋅ =r b a em que se
introduziu um vector b com α = ⋅ = ⋅b a a b .
O a
b
r −r b
plano π
Carlos R. Paiva 10
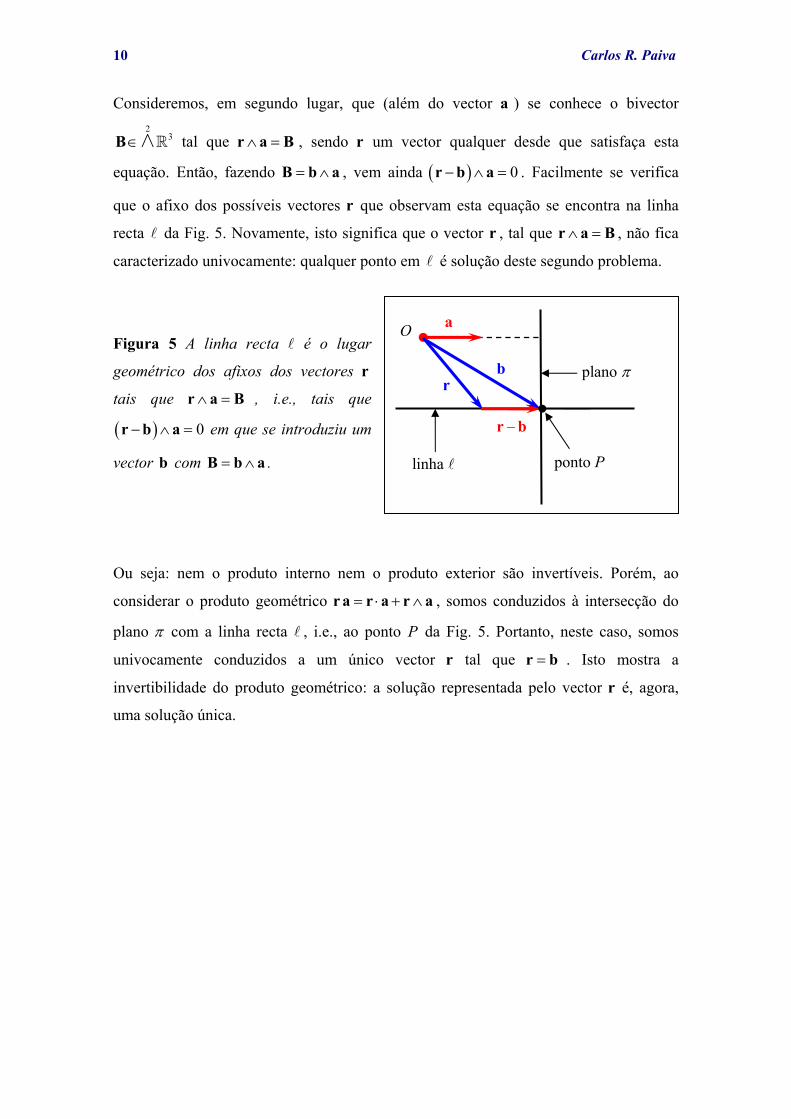
Consideremos, em segundo lugar, que (além do vector a ) se conhece o bivector 2
3∈B ∧ tal que ∧ =r a B , sendo r um vector qualquer desde que satisfaça esta
equação. Então, fazendo = ∧B b a , vem ainda ( ) 0− ∧ =r b a . Facilmente se verifica
que o afixo dos possíveis vectores r que observam esta equação se encontra na linha
recta da Fig. 5. Novamente, isto significa que o vector r , tal que ∧ =r a B , não fica
caracterizado univocamente: qualquer ponto em é solução deste segundo problema.
Figura 5 A linha recta é o lugar
geométrico dos afixos dos vectores r
tais que ∧ =r a B , i.e., tais que
( ) 0− ∧ =r b a em que se introduziu um
vector b com = ∧B b a .
Ou seja: nem o produto interno nem o produto exterior são invertíveis. Porém, ao
considerar o produto geométrico = ⋅ + ∧r a r a r a , somos conduzidos à intersecção do
plano π com a linha recta , i.e., ao ponto P da Fig. 5. Portanto, neste caso, somos
univocamente conduzidos a um único vector r tal que =r b . Isto mostra a
invertibilidade do produto geométrico: a solução representada pelo vector r é, agora,
uma solução única.
O a
br
−r b
plano π
linha ponto P

11Álgebra Geométrica do Espaço: Introdução
2. Trivectores, contracções e duais de Clifford Assim como o produto geométrico gera a álgebra geométrica, inventada por Clifford,
também o produto exterior gera uma álgebra – a álgebra exterior de Grassmann. O
produto exterior gera objectos denominados lâminas. As lâminas representam os
subespaços da álgebra geométrica.
Definição: Uma lâmina é um multivector que resulta do produto exterior de r vectores.
Um bivector é, assim, uma lâmina de grau dois; um vector é uma lâmina de grau um;
um escalar pode ser entendido como uma lâmina de grau zero. Podemos, agora, analisar
as lâminas de grau três: os trivectores.
Notação: As lâminas são representadas a negrito por letras maiúsculas. É o caso do
bivector (lâmina-2) = ∧B a b . As excepções são: (i) os vectores (lâminas-1), que são
representados por letras minúsculas a negrito: (ii) os escalares (lâminas-0), que são
representados por letras gregas, e.g., α = ⋅a b .
Os trivectores resultam do produto exterior de três vectores. Sejam 3, , ∈a b c . O
trivector = ∧ ∧V a b c pode ser entendido de duas formas distintas: (i) definindo o
bivector 1 = ∧B a b , vem 1= ∧V B c ; (ii) definindo o bivector 2 = ∧B b c , vem
2= ∧V a B . Está-se, naturalmente, a admitir a associatividade do produto exterior, i.e.,
que se tem 1 2∧ = ∧B c a B .
( ) ( )associatividade do produto exterior → ∧ ∧ = ∧ ∧a b c a b c
Assim como um bivector codifica uma área orientada num determinado plano, um
trivector codifica um determinado volume orientado. Note-se que se podem definir
triedros com duas orientações distintas: triedros direitos e triedros esquerdos. Na figura
anexa mostra-se como o trivector V se pode obter: (i) através de 1= ∧V B c , fazendo
deslizar o bivector 1 = ∧B a b ao longo do vector c (figura da esquerda); (ii) através de

Carlos R. Paiva 12
2= ∧V a B , fazendo deslizar o bivector 2 = ∧B b c ao longo do vector a (figura da
direita). A associatividade é óbvia através da observação da figura.
Figura 6 O trivector = ∧ ∧V a b c é representado geometricamente por um volume
orientado. Na figura da esquerda V obtém-se fazendo deslizar o bivector ∧a b ao
longo do vector c . Na figura da direita V obtém-se fazendo deslizar o bivector ∧b c
ao longo do vector a .
A anti-simetria e a associatividade do produto exterior garantem que:
.
∧ ∧ = ∧ ∧ = ∧ ∧= − ∧ ∧ = − ∧ ∧ = − ∧ ∧
a b c b c a c a bc b a a c b b a c
Uma lâmina de grau r (uma lâmina- r ) rA pode dar origem a duas novas lâminas
através de dois tipos de involuções: (i) involução de grau; (ii) reversão.
( )( ) ( )2 2
involução de grau: 1involuções da lâmina
reversão: 1
rr r r
r r rr r r
−
= −→
= −
A A AA
A A A
Note-se que, deste modo, = −a a . O reverso de uma lâmina corresponde a inverter a
ordem dos vectores, i.e.,
∧a b a
b c
a
c ∧b c
b

13Álgebra Geométrica do Espaço: Introdução
( )( )
~
~exemplos de reversão
∧ = ∧ = − ∧→
∧ ∧ = ∧ ∧ = − ∧ ∧
a b b a a b
a b c c b a a b c
tendo-se, obviamente, =a a . Estamos, agora, em condições de apresentar a álgebra
geométrica 3C como a soma directa dos subespaços onde residem as suas lâminas.
2 3
3 3 33álgebra geométrica do espaço C→ = ⊕ ⊕ ⊕∧ ∧
3
233
33
subespaço dos escalares:
subespaços da álgebra subespaço dos vectores:geométrica subespaço dos bivectores:
subespaço dos trivectores:
C→
∧
∧
3
30 1 2 30
multivector genérico da álgebrar
ru u u u u u C
=
→ = = + + + ∈∑
0
31
3 323
23
33
lâminas de
u
uC u C
u
u
α
α
= ∈
= ∈→ ⇒ = + + + ∈
= ∈
= ∈
aa B V
B
V
∧
∧
Tem particular relevância o trivector unitário que se representa por 123e . Numa base
ortonormada { }1 2 3, ,e e e do espaço linear 3 , tem-se
123 1 2 3
123 3 2 1 1 2 3 123
trivector unitárioreverso do trivector unitário
→ = ∧ ∧→ = ∧ ∧ = − ∧ ∧ = −
e e e ee e e e e e e e
.
0 1 2 3
3 0 1 2 3
0 1 2 3
involução de grau:involuções em reversão:
conjugação de Clifford:
u u u u uC u u u u u
u u u u u
= − + −→ = + − −
= − − +

Carlos R. Paiva 14
Vamos agora investigar qual é a natureza do produto geométrico de um vector a com
um bivector = ∧B b c .
( ) 3u C= = ∧ ∈a B a b c
Vem sucessivamente
( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ( )
1 1 12 2 21 12 22 2
1 .2
∧ = − = −
= ⋅ − − ⋅ −⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦
= ⋅ − ⋅ − −
a b c a bc cb ab c ac b
a b ba c a c ca b
a b c a c b bac cab
Mas, por outro lado,
( ) ( ) ( )
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
1 1 12 2 2
1 12 22 2
1212
− = −
= ⋅ − − ⋅ −⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦
= ⋅ − ⋅ − −
= ⋅ − ⋅ − −
= ⋅ − ⋅ − ∧
bac cab b ac c ab
b a c ca c a b ba
a c b a b c bca cba
a c b a b c bc cb a
a c b a b c b c a
pelo que, após substituir esta última expressão no resultado precedente, vem
( ) ( ) ( ) ( ) ( ) ( )∧ = ⋅ − ⋅ − ⋅ − ⋅ − ∧⎡ ⎤⎣ ⎦a b c a b c a c b a c b a b c b c a
( ) ( ) ( ) ( )2 2∴ ∧ − ∧ = ⋅ − ⋅a b c b c a a b c a c b .
( ) ( ) 3conclusão 2 2→ − = ⋅ − ⋅ ∈aB Ba a b c a c b .
Define-se, então, a contracção à esquerda

15Álgebra Geométrica do Espaço: Introdução
( )1contracção à esquerda2
→ = −a B aB Ba .
Desta definição resulta imediatamente
( ) ( ) ( )regra fundamental dacontracção à esquerda
→ ∧ = ⋅ − ⋅a b c a b c a c b .
Existe uma forma alternativa de deduzir esta regra fundamental e que será importante
para a sua generalização. Esta forma alternativa consiste na aplicação sucessiva de
( )2= ⋅ −ab a b ba .
Consideremos, então, o produto geométrico 1 2aa a de três vectores 31 2, , ∈a a a . Virá
sucessivamente
( )( ) ( )
1 2 1 2 1 2
1 2 2 1 1 2
22 2
= ⋅ −= ⋅ − ⋅ +
aa a a a a a aaa a a a a a a a a
( ) ( )1 2 1 2 1 2 2 12 2∴ − = ⋅ − ⋅aa a a a a a a a a a a .
Mas, por outro lado, tem-se por definição
( ) ( ) ( )1 2 1 2 1 212
∧ = ∧ − ∧⎡ ⎤⎣ ⎦a a a a a a a a a .
Admitindo agora que 1 2 0⋅ =a a , vem 1 2 1 2= ∧a a a a . Logo
( ) ( ) ( ) ( )1 2 1 2 1 2 1 2 1 2 2 12 2− = ∧ − ∧ = ⋅ − ⋅aa a a a a a a a a a a a a a a a a
donde se infere efectivamente a regra fundamental da contracção à esquerda
( ) ( ) ( )1 2 1 2 2 1∧ = ⋅ − ⋅a a a a a a a a a .

Carlos R. Paiva 16
Este tipo de dedução permite facilmente a generalização para o produto geométrico
1 2 3aa a a de quatro vectores 31 2 3, , , ∈a a a a . Vejamos.
( )( ) ( )( ) ( ) ( )
1 2 3 1 2 3 1 2 3
1 2 3 2 1 3 1 2 3
1 2 3 2 1 3 3 1 2 1 2 3
22 22 2 2
= ⋅ −= ⋅ − ⋅ += ⋅ − ⋅ + ⋅ −
aa a a a a a a a aa aa a a a a a a a a a aaa a a a a a a a a a a a a a a a
( ) ( ) ( )1 2 3 1 2 3 1 2 3 2 1 3 3 1 22 2 2∴ + = ⋅ − ⋅ + ⋅aa a a a a a a a a a a a a a a a a a a .
Admitamos, agora, que 1 2 0⋅ =a a , 1 3 0⋅ =a a e 2 3 0⋅ =a a . Vem então
( ) ( )( ) ( ) ( )( )( ) ( )( ) ( )( )
1 2 3 1 2 3 1 2 3 1 2 3
1 2 3 2 1 3 3 1 2
1 2 3 2 1 3 3 1 2
2 2 22 2 2
+ = ∧ ∧ + ∧ ∧= ⋅ − ⋅ + ⋅= ⋅ ∧ − ⋅ ∧ + ⋅ ∧
aa a a a a a a a a a a a a a aa a a a a a a a a a a aa a a a a a a a a a a a
( ) ( ) ( )1 2 3 1 2 3 1 2 3
contracção à esquerda1de um trivector2
com um vector→ ∧ ∧ = ∧ ∧ + ∧ ∧⎡ ⎤⎣ ⎦a a a a a a a a a a a a
( ) ( )( ) ( )( ) ( )( )1 2 3 1 2 3 2 1 3 3 1 2∴ ∧ ∧ = ⋅ ∧ − ⋅ ∧ + ⋅ ∧a a a a a a a a a a a a a a a a .
Facilmente se verifica a seguinte identidade de Jacobi:
( ) ( ) ( )identidade de Jacobi 0→ ∧ + ∧ + ∧ =a b c b c a c a b .
Uma outra consequência importante desta regra é que, em relação à base ortonormada
{ }1 2 3, ,e e e do espaço linear 3 , se pode inferir que
( ) ( ) ( )1 2 3 1 2 3 1 3 2 0
0 0
∧ = ⋅ − ⋅ =e e e e e e e e e .

17Álgebra Geométrica do Espaço: Introdução
Analogamente define-se uma contracção à direita
( )1contracção à direita2
→ = −B a Ba aB
anti-simetria entre a contracção
à esquerda e a contracção à direita∴ → = −a B B a .
Consideremos a seguinte decomposição em partes par e ímpar:
( ) ( )produto geométrico de 1 1
um vector com um bivector 2 2parte ímpar parte par
u→ = = − + +aB aB Ba aB Ba .
O produto geométrico de um vector a por um bivector B é, em geral, a soma
(graduada) de um vector com um trivector. Para entender esta afirmação basta
considerar a decomposição ⊥= +a a a em que a se encontra no plano definido por B .
Então, considerando um vector b perpendicular a a ( )0⋅ =a b e também localizado
em B , tal que = ∧ =B a b a b , vem 2=a B a b que é um vector. Mas, por outro lado,
( )⊥ ⊥ ⊥= ∧ =a B a a b a a b é o produto de três vectores ortogonais entre si e,
consequentemente, é um trivector. Ou seja, ( ) 2⊥ ⊥= + = + ∧ ∧aB a a B a b a a b é
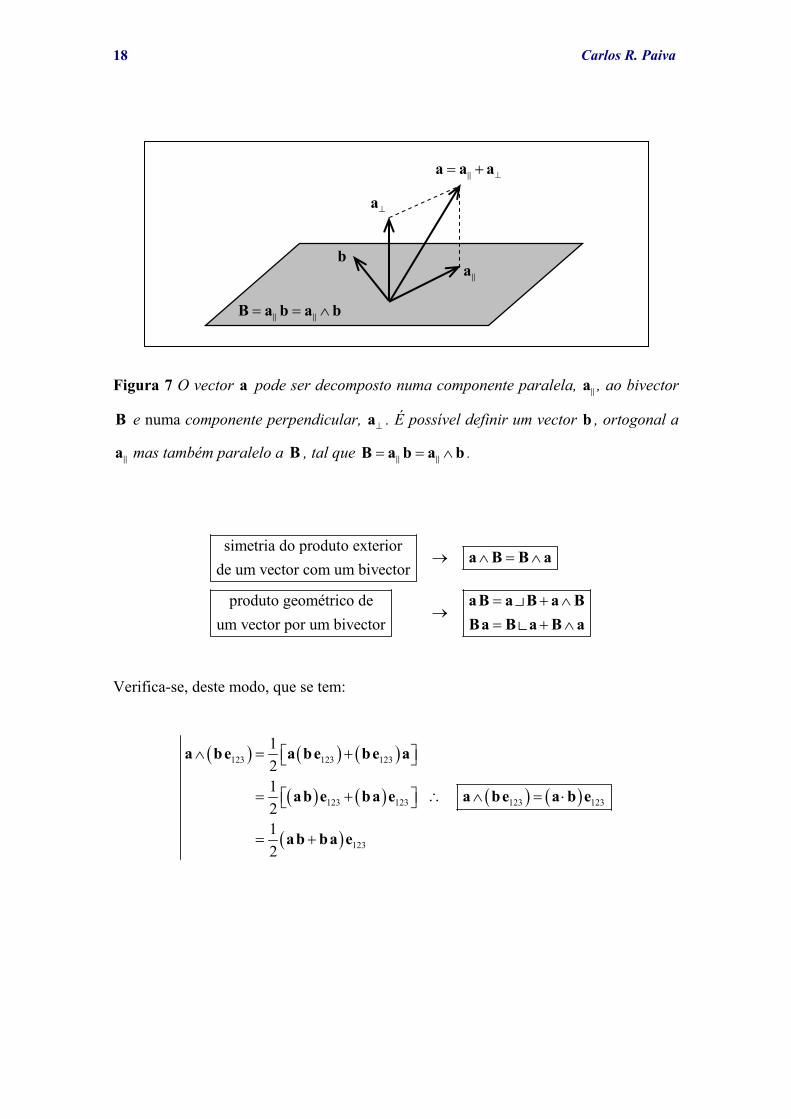
efectivamente a soma de um vector com um trivector (Fig. 7).
( ) ( )3
3 31 12 2
vector trivector
u = = − + + ∈ ⊕a B a B Ba a B Ba ∧
( )
( )
3
33
1212
− = ∈∴
+ = ∧ ∈
aB Ba a B
aB Ba a B ∧
Carlos R. Paiva 18
= = ∧B a b a b
⊥= +a a a
a
⊥a
b
Figura 7 O vector a pode ser decomposto numa componente paralela, a , ao bivector
B e numa componente perpendicular, ⊥a . É possível definir um vector b , ortogonal a
a mas também paralelo a B , tal que = = ∧B a b a b .
simetria do produto exteriorde um vector com um bivector
produto geométrico deum vector por um bivector
→ ∧ = ∧
= + ∧→
= + ∧
a B B a
aB a B a BBa B a B a
Verifica-se, deste modo, que se tem:
( ) ( ) ( )
( ) ( )
( )
( ) ( )
123 123 123
123 123 123 123
123
121212
∧ = +⎡ ⎤⎣ ⎦
= + ∴ ∧ = ⋅⎡ ⎤⎣ ⎦
= +
a be a be be a
ab e ba e a be a b e
ab ba e
19Álgebra Geométrica do Espaço: Introdução
( ) ( ) ( )
( ) ( )
( )
( ) ( ) ( )
123 123 123
123
123
123 123
1212
∧ ∧ = ∧ − ∧⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦
= ∧ − ∧⎡ ⎤⎣ ⎦
⎡ ⎤= ∧⎣ ⎦
∴ ∧ ∧ = ⋅ − ⋅⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦
a b c e a b c e b c ae
a b c b c a e
a b c e
a b c e a b c a c b e
( ) ( ) ( )
( ) ( )
( )
( )
121 12 212
∧ ∧ = ∧ + ∧⎡ ⎤⎣ ⎦
= − ⋅ + ⋅ − ∴ ∧ ∧ = −⎡ ⎤⎣ ⎦
= −
a b c a b c b c a
a bc b c b c cb a a b c abc cba
abc cba
( )
( ) ( ) ( )
( )
131 1 1 13 2 2 2
16
∧ ∧ = ∧ ∧ + ∧ ∧ + ∧ ∧
⎡ ⎤= − + − + −⎢ ⎥⎣ ⎦
∴ ∧ ∧ = + + − − −
a b c a b c b c a c a b
abc cba bca acb cab bac
a b c abc bca cab cba acb bac
Clarifiquemos a interpretação geométrica associada às duas contracções. Notemos, para
esse efeito, que
( ) ( ) ( ) ( )1 1 1 1− − − −
⊥
= = = + ∧a a B B a B B a B B a B B
a a
( ) ( )( ) ( )
1
11
ˆ ˆ ˆ
ˆ ˆ1 ˆ ˆˆˆ ˆ
−⊥
−−⊥
⊥
=⎧ = = ∧⎪ = = −⎪∴ → ⇒⎨== ∧ = − ∧⎪ = −
⎪⎩ = ∧
a B a BB B B a B a Ba a B B a B B
a B a Ba a B B a B BB BB a B a B
( ) ( )1 ˆ ˆ−= =a a B B B Ba .
Carlos R. Paiva 20
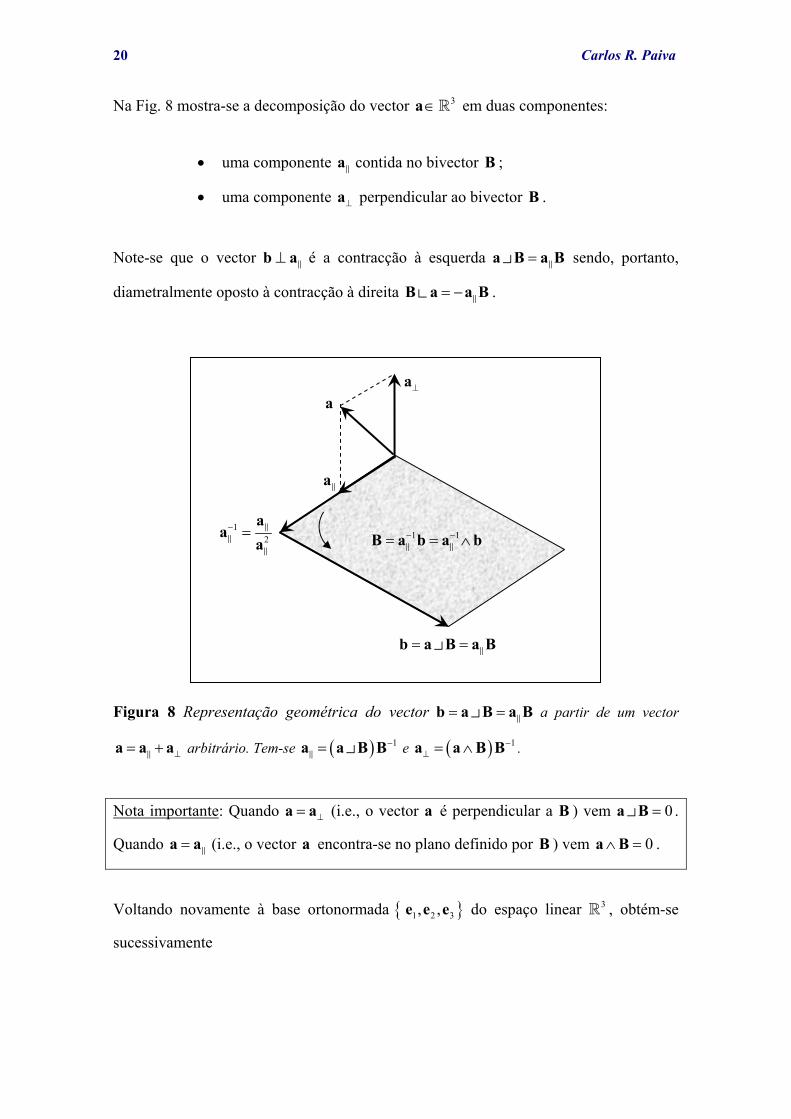
Na Fig. 8 mostra-se a decomposição do vector 3∈a em duas componentes:
• uma componente a contida no bivector B ;
• uma componente ⊥a perpendicular ao bivector B .
Note-se que o vector ⊥b a é a contracção à esquerda =a B a B sendo, portanto,
diametralmente oposto à contracção à direita = −B a a B .
Figura 8 Representação geométrica do vector = =b a B a B a partir de um vector
⊥= +a a a arbitrário. Tem-se ( ) 1−=a a B B e ( ) 1−⊥ = ∧a a B B .
Nota importante: Quando ⊥=a a (i.e., o vector a é perpendicular a B ) vem 0=a B .
Quando =a a (i.e., o vector a encontra-se no plano definido por B ) vem 0∧ =a B .
Voltando novamente à base ortonormada { }1 2 3, ,e e e do espaço linear 3 , obtém-se
sucessivamente
a⊥a
a
= =b a B a B
12
− =a
aa
1 1− −= = ∧B a b a b

21Álgebra Geométrica do Espaço: Introdução
( ) ( ) ( )
( )
1 2 3 1 2 3 1 2 3 2 3 1 2 3
1 2 3 1 2 3
1 2 3
123
0
.
= = ⋅ + ∧ = ∧
= ∧ + ∧ ∧
= ∧ ∧
=
e e e e e e e e e e e e e e
e e e e e e
e e e
e
Conclusão importante: O trivector unitário 123e é tal que
123 1 2 3 1 2 3trivector (ou pseudoescalar) unitário → = ∧ ∧ =e e e e e e e .
Em geral, para qualquer trivector, é então possível escrever
123123 123
123 123
== − ⇒
= = −V V e
e eV V e V e
( )( )2 2 2 3123 123 123 123 123 1 2 3 3 2 1 1 2 3 1= = − = − = − = −e e e e e e e e e e e e e e
2 22 2123∴ = = −V V e V
1 1232inverso de um trivector −→ = = −
eVVV V
.
Uma outra operação importante é a dualidade na álgebra geométrica que faz
corresponder a cada multivector 3u C∈ o seu dual de Clifford 123 3u C∈e . O dual de
um escalar é um trivector (também designado por pseudoescalar). O dual de um vector é
um bivector.
123dual de Clifford u u→ e
Consideremos uma base ortonormada { }1 2 3, ,e e e do espaço linear 3 . Vem

Carlos R. Paiva 22
1 1 2 2 3 3
31 1 2 2 3 3
1 1 2 2 3 3
1,vectores de
0,i j i j
a a ai j
b b bi j
c c cδ
= + +⎧=⎧ ⎪⋅ = = → = + +⎨ ⎨≠⎩ ⎪ = + +⎩
a e e ee e b e e e
c e e e
1 123 23 23 123 1
2 123 31 31 123 2 123 123
3 123 12 12 123 3
duais de Clifford 1= = −
→ = = − = −= = −
e e e e e ee e e e e e e ee e e e e e
1 1 2 2 3 3
12 1 223 31 12 2
23 2 3 31 2 3
31 3 11 2 3
123 1 2 31 2 3 3
31 2 3 123
1 2 3
escalar
bivector
trivector
a b a b a b
a a ab b b
a a ab b bc c c
→ ⋅ = + + ∈
= ∧= ∧
→ → ∧ = ∈= ∧= ∧ ∧
→ ∧ ∧ = ∈
a b
e e ee e e
e e ea b
e e ee e e e
a b c e
∧
∧
Figura 9 Base dos bivectores de 3C . Qualquer bivector B é uma combinação linear
dos três bivectores de base: { }12 23 31, ,e e e . Por exemplo, tem-se 31 3 1 3 1= ∧ =e e e e e .
1e
2e
3e
23 2 3= ∧e e e
12 1 2= ∧e e e
23Álgebra Geométrica do Espaço: Introdução
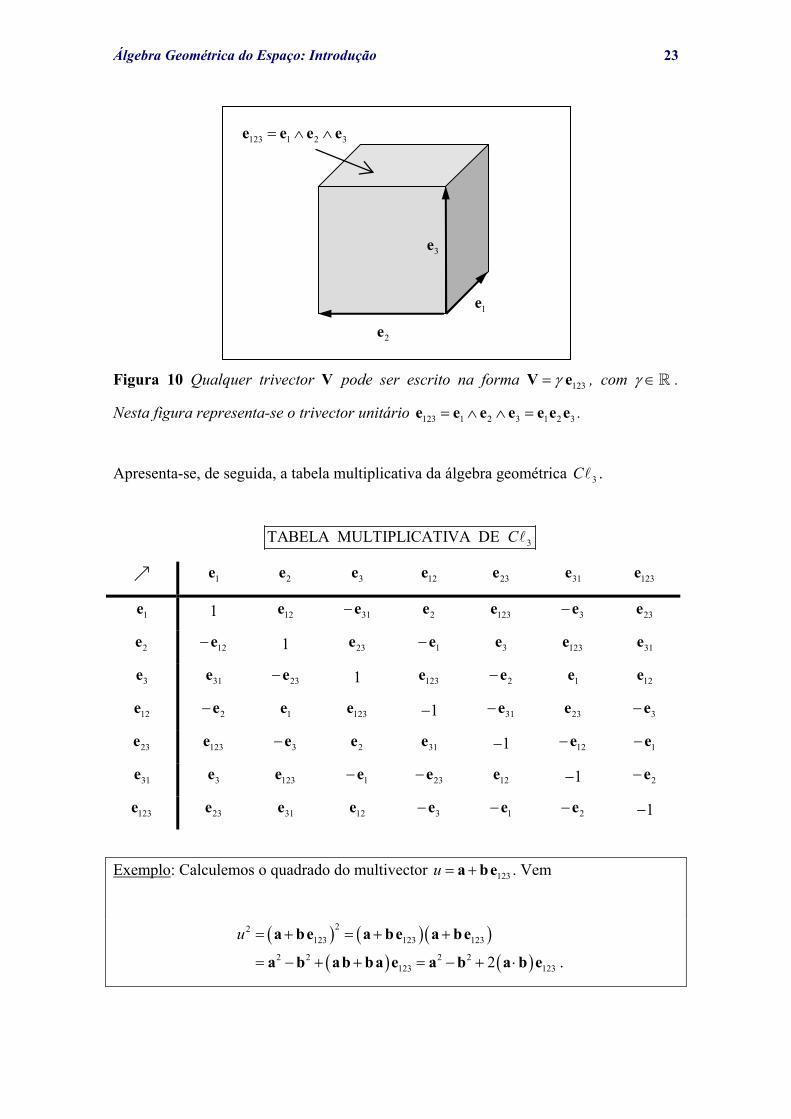
Figura 10 Qualquer trivector V pode ser escrito na forma 123γ=V e , com γ ∈ .
Nesta figura representa-se o trivector unitário 123 1 2 3 1 2 3= ∧ ∧ =e e e e e e e .
Apresenta-se, de seguida, a tabela multiplicativa da álgebra geométrica 3C .
3TABELA MULTIPLICATIVA DE C
1e 2e 3e 12e 23e 31e 123e
1e 1 12e 31−e 2e 123e 3−e 23e
2e 12−e 1 23e 1−e 3e 123e 31e
3e 31e 23−e 1 123e 2−e 1e 12e
12e 2−e 1e 123e 1− 31−e 23e 3−e
23e 123e 3−e 2e 31e 1− 12−e 1−e
31e 3e 123e 1−e 23−e 12e 1− 2−e
123e 23e 31e 12e 3−e 1−e 2−e 1−
Exemplo: Calculemos o quadrado do multivector 123u = +a be . Vem
( ) ( )( )
( ) ( )
22123 123 123
2 2 2 2123 1232 .
u = + = + +
= − + + = − + ⋅
a be a be a be
a b ab ba e a b a b e
2e
3e
1e
123 1 2 3= ∧ ∧e e e e

Carlos R. Paiva 24
Nota: Na álgebra 3C existem divisores de zero, i.e., multivectores 3,p q C∈ tais que
0p q = mas onde 0p ≠ e 0q ≠ . Com efeito, basta considerar q p= ( p é o conjugado
de Clifford de p ) com ( 3ˆ ∈n é um vector unitário, com 2ˆ 1=n )
( )
( )
1 ˆ12divisores de zero 01 ˆ12
pp p p p
p
= +→ ⇒ = =
= −
n
n.
Os paravectores (chama-se paravector ao multivector que resulta da soma de um escalar
com um vector) considerados são idempotentes, i.e., tem-se 2p p= e 2p p= . Note-se
que 1p p+ = e ˆp p− = n . Além disso, introduzindo o bivector unitário 123ˆ ˆ=B ne
ortogonal a n̂ (i.e., com ˆˆ 0=n B pelo que ˆ ˆˆ ˆ=n B Bn ), vem
( )2 2 2ˆ ˆ ˆ ˆp p p p p p p p p p+ = − + − = − =B B B n
o que mostra que um vector pode ter raízes quadradas. Logo
( ) ( )2 2 2 1ˆ ˆ ˆ ˆ1 1 1k kk k+= − ⇒ = − ⇒ = −B B B B
( ) ( ) ( ) ( ) ( ) ( )
( ) ( )
2 2 1
1231 1
ˆ ˆ ˆexp exp 1 1 12 2 ! 2 1 !
ˆ1 cos 1 sin 1 2
k kk k
k k
p p pk k
p p p
π π ππ
π π
+∞ ∞
= =
⎡ ⎤− = = + − + −⎢ ⎥ +⎣ ⎦
= + − + = −⎡ ⎤⎣ ⎦
∑ ∑B e B B
B
( ) 123ˆ ˆexp 12π⎡ ⎤∴ − =⎢ ⎥⎣ ⎦
n e n
o que mostra que se pode, também, calcular o logaritmo de um vector.

25Álgebra Geométrica do Espaço: Introdução
Vejamos, agora, qual é a dimensão da álgebra geométrica do espaço.
123 123 123
2 2123 123 123
ˆ ˆ ˆˆ ˆˆ 1
uu
α β γγ β α
= = + + +→
= − − + += − =
B ue a ue ee u ae eu B
1 2 3 12 23 31 1233
1base de
escalar vectores bivectores pseudoescalarC
⎧ ⎫⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤→ ⎨ ⎬⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎩ ⎭
e e e e e e e
0 1 1 2 2 3 3 23 23 31 31 12 12 123 123 3
0 1 2 3
multivector u u u u u u u u u Cu u u u
→ = + + + + + + + ∈e e e e e e e
11 1
1 2 11 3 3 1
( )332 8 dim 8C→ = → =
Atendendo a que se tem
( ) ( )
2 2 2 1
2 2 2 1123 123 123 123
ˆ ˆ ˆ ˆ1 1
1 1 1
k k
k kk k
+
+
= ⇒ = ⇒ =
= − ⇒ = − ⇒ = −
u u u u
e e e e
infere-se que
( ) ( ) ( )
( )( )
( )( )
( ) ( ) ( ) ( )
( ) ( )
123123
0
2 2 1123 123
0 0
2 2 1
1230 0
123
ˆˆ ˆexp exp!
ˆ ˆ2 ! 2 1 !
ˆ1 12 ! 2 1 !
ˆcos sin
k
k
k k
k k
k kk k
k k
k
k k
k k
θθ θ
θ θ
θ θ
θ θ
∞
=
+∞ ∞
= =
+∞ ∞
= =
= =
= ++
= − + −+
= +
∑
∑ ∑
∑ ∑
ueB ue
ue ue
ue
u e
( ) ( ) ( )
( ) ( ) ( )123 123ˆ ˆexp cos singeneralizações geométricas da
fórmula de Euler ˆ ˆexp cos sin
θ θ θ
θ θ θ
= +→
= +
ue ue
B B.

Carlos R. Paiva 26
( ) ( )
( )
( )( )123
ˆcosˆ ˆˆ cos sin
sinˆexp
u α βα θ
θ θβ θ
θ
= = ⋅ + ∧ = += ⋅ =∧
= = → = + →= ∧ =∧
=
ab a b a b Ba ba bB ue Ba ba b
B
( )( ) ( )
1 1
2 2
tan tan ,ˆcos sinu
βθα
θ θ
α β
− − ⎛ ∧ ⎞⎛ ⎞= = =⎜ ⎟⎜ ⎟ ⋅⎝ ⎠ ⎝ ⎠ ⎡ ⎤→ = = +⎣ ⎦= + =
a ba b
a bab a b B
a b
.
Nota: Confirma-se, deste modo, que o produto geométrico de dois vectores é
comutativo quando estes são paralelos e anti-comutativo quando estes são
perpendiculares.
0 0
02
θ
πθ
= ⇒ ⇒ ∧ = ⇒ =
= ⇒ ⊥ ⇒ ⋅ = ⇒ = −
a b a b ab ba
a b a b ab ba
Nas duas figuras anexas (Fig. 11) representam-se graficamente: (i) o bivector que é o
dual (de Clifford) de um vector; (ii) o vector que é o dual (de Clifford) de um bivector.
23 3
1232
3 3123
dual (de Clifford) de um vector:
dual (de Clifford) de um bivector:
∈ = ∈
∈ = ∈
a A ae
B b Be
∧
∧
Consideremos um multivector genérico 3u C∈ . Vejamos como calcular o respectivo
inverso 13u C− ∈ . Sendo 3u C∈ o respectivo reverso e 3u C∈ o conjugado de
Clifford, vem sucessivamente
123 123
123 123
123 123
uuu
α βα βα β
= + + += + − −= − − +
a be ea be ea be e
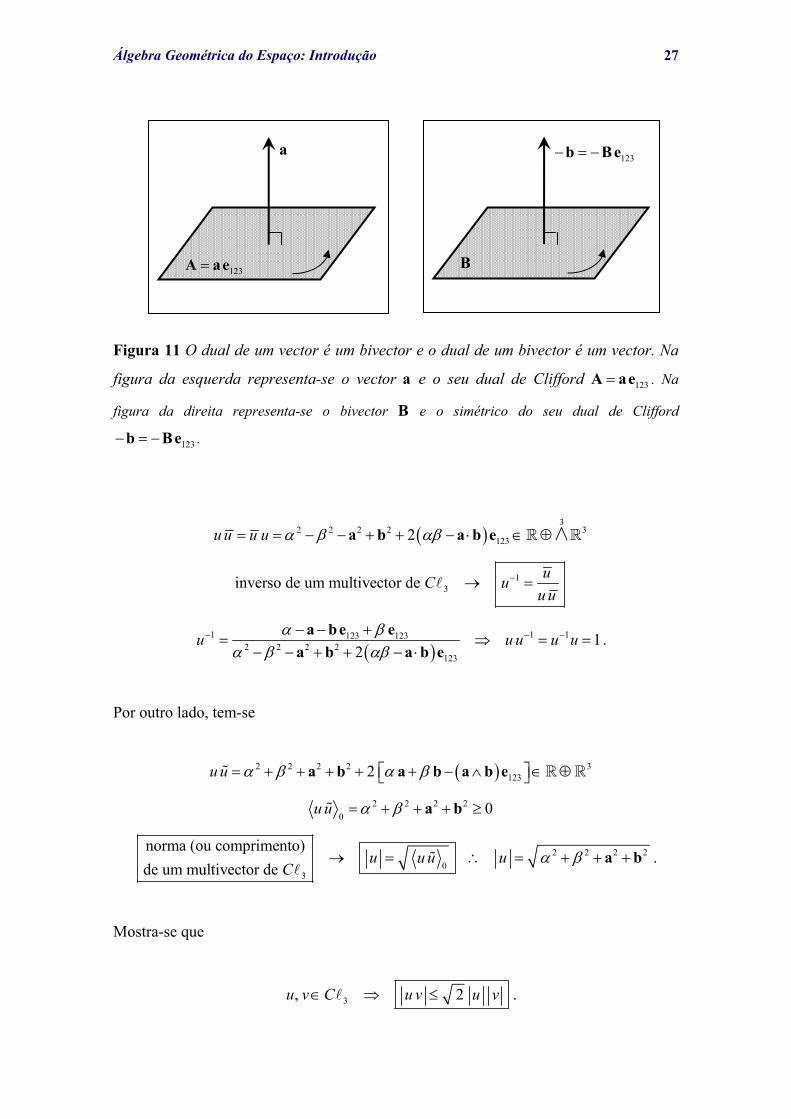
27Álgebra Geométrica do Espaço: Introdução
Figura 11 O dual de um vector é um bivector e o dual de um bivector é um vector. Na
figura da esquerda representa-se o vector a e o seu dual de Clifford 123=A ae . Na
figura da direita representa-se o bivector B e o simétrico do seu dual de Clifford
123− = −b Be .
( )3
2 2 2 2 31232u u u u α β αβ= = − − + + − ⋅ ∈ ⊕a b a b e ∧
13inverso de um multivector de uC u
u u−→ =
( )
1 1 1123 1232 2 2 2
123
12
u u u u uα βα β αβ
− − −− − += ⇒ = =
− − + + − ⋅a be e
a b a b e.
Por outro lado, tem-se
( )2 2 2 2 31232u u α β α β= + + + + + − ∧ ∈ ⊕⎡ ⎤⎣ ⎦a b a b a b e
2 2 2 20
0u u α β= + + + ≥a b
2 2 2 20
3
norma (ou comprimento)de um multivector de
u u u uC
α β→ = ∴ = + + +a b .
Mostra-se que
3, 2u v C u v u v∈ ⇒ ≤ .
a
123=A ae
123− = −b Be
B

Carlos R. Paiva 28
Em geral, pode-se escrever (com 3,u v C∈ )
( )
( )123 123
3 123 123
definições geraisdas contracções em
u v u vC u v u v
= − ∧⎡ ⎤⎣ ⎦→= − ∧⎡ ⎤⎣ ⎦
e e
e e
e ainda, com 3∈a ,
u u u
u u u= + ∧= + ∧
a a aa a a
( ) ( ) ( )
( ) ( ) ( )u v u v u v
u v u v u v
∧ = ∧ + ∧
∧ = ∧ + ∧
a a a
a a a
tendo-se, em particular,
( )
( )
13
31
3
1 121 12
kkk
kk
u u uu
u u u
−
+
⎡ ⎤= − − ∈⎣ ⎦∈ →
⎡ ⎤∧ = + − ∈⎣ ⎦
a a a
a a a
∧∧
∧
( )
( )
13
31
3
1 121 12
kkk
kk
u u uu
u u u
−
+
⎡ ⎤= − − ∈⎣ ⎦∈ →
⎡ ⎤∧ = + − ∈⎣ ⎦
a a a
a a a
∧∧
∧
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
3
3
1
1
k k
k k
u u v u v u v
v u v u v u v
∈ ⇒ ∧ = ∧ + − ∧
∈ ⇒ ∧ = ∧ + − ∧
a a a
a a a
∧
∧
uma vez que, ( )1 ku u= − quando 3k
u∈∧ (i.e., quando u é uma lâmina- k ). Note-se
ainda que, no caso em que 2
3∈B ∧ é um bivector, vem (com 3u C∈ )

29Álgebra Geométrica do Espaço: Introdução
( )
( )
1212
u u u u u
u u u u u
= + − + ∧
= + − + ∧
B B B B B
B B B B B.
Estas equações reduzem-se às fórmulas já conhecidas
= + ∧= + ∧
a B a B a BBa B a B a
.
Exemplo: Facilmente se determinam as componentes , ,α β γ da decomposição de um
vector 3∈r em termos de outros três vectores conhecidos 3, , ∈a b c . Pretende-se,
portanto, resolver o sistema de equações lineares
sistema linear α β γ→ = + +r a b c
em ordem a , ,α β γ . Vem sucessivamente
( ) ( )( ) ( )( ) ( )
( )( )( )
β γ γα γ αα β β
∧ = ∧ + ∧ ∧ ∧ = ∧ ∧⎧ ⎧⎪ ⎪∧ = ∧ + ∧ ⇒ ∧ ∧ = ∧ ∧⎨ ⎨⎪ ⎪∧ = ∧ + ∧ ∧ ∧ = ∧ ∧⎩ ⎩
r a b a c a r a b c a br b a b c b r b c a b cr c a c b c r c a b c a
solução , ,α β γ∧ ∧ ∧ ∧ ∧ ∧→ = = =
∧ ∧ ∧ ∧ ∧ ∧r b c r c a r a ba b c a b c a b c
.
Esta é a expressão da regra de Cramer em álgebra geométrica.
Exercício: Sabendo que o vector x é tal que ∧ =a x B e α⋅ =c x , mostre que
α +
=⋅
a c Bx
c a.
Sugestão: Note que ( ) ( ) ( )∧ = ⋅ − ⋅c a x c a x c x a .

Carlos R. Paiva 30
Exemplo: Sabendo que 3ˆˆ, ∈a b são dois vectores unitários (i.e., com 2 2ˆˆ 1= =a b ) tais
que ( )ˆ ˆˆ exp θ=ab B e onde B̂ é um bivector unitário (i.e., com 2ˆ 1= −B ), tem-se
( )
( )
2 2
2 2
ˆˆ 4 cos2
ˆˆ 4 sin2
θ
θ
⎛ ⎞+ = ⎜ ⎟⎝ ⎠⎛ ⎞− = ⎜ ⎟⎝ ⎠
a b
a b.
Notando que ( ) ( ) ( ) ( ) ( ) ( )( )2 2ˆ ˆ ˆ ˆ ˆ ˆ ˆˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ1 1+ = + + = + + = + +a b a b a a b a b aa a b ba ab , vem
( ) ( ) ( )
( ) ( )
2
2
2
ˆ ˆ ˆˆ 1 exp 1 exp
ˆ ˆ ˆ ˆ1 exp exp exp 1 exp2 2
ˆ ˆexp exp2 2
ˆ4 cos .2
θ θ
θ θθ θ
θ θ
θ
⎡ ⎤ ⎡ ⎤+ = + − +⎣ ⎦ ⎣ ⎦
⎛ ⎞ ⎛ ⎞⎡ ⎤ ⎡ ⎤= + − − +⎜ ⎟ ⎜ ⎟⎣ ⎦ ⎣ ⎦⎝ ⎠ ⎝ ⎠
⎡ ⎤⎛ ⎞ ⎛ ⎞= + −⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
⎛ ⎞= ⎜ ⎟⎝ ⎠
a b B B
B B B B
B B
B
Problema: Determinar a solução da equação α + =x x B a .
Solução: Notando que ( ) 0∧ =x B B , vem ( )α ∧ = ∧x B a B . Logo, de
α + − ∧ =x xB x B a , resulta ( )1α α −+ − ∧ =x x B a B a , ou seja,
( ) ( ) 11 αα
−⎡ ⎤= + ∧ +⎢ ⎥⎣ ⎦x a a B B
( )( ) ( ) 12 22 2
αα α α αα
− −+ − = − ⇒ + =
−BB B B BB
( ) ( )2
2 2
α αα
+ − ∧∴ =
−
a a B a B Bx
B.

31Álgebra Geométrica do Espaço: Introdução
Nota final: Facilmente se demonstra que não existem lâminas-4 em 3C . Ou seja, dados
quatro vectores 3, , , ∈a b c d tem-se necessariamente 0∧ ∧ ∧ =a b c d . Com efeito, em 3 só três vectores é que podem ser linearmente independentes. Isto significa que, e.g.,
o vector d é necessariamente uma combinação linear dos outros três
, ,α β γ α β γ∈ → = + +d a b c .
Mas então, com efeito, tem-se
( )( ) ( ) ( )
0 .
α β γα β γ
∧ ∧ ∧ = ∧ ∧ ∧ + += ∧ ∧ ∧ + ∧ ∧ ∧ + ∧ ∧ ∧=
a b c d a b c a b ca b c a a b c b a b c c

Carlos R. Paiva 32
3. Produto externo
O produto externo não faz parte da álgebra geométrica 3C . Porém, atendendo à sua
grande utilização quer em física quer em engenharia, vai-se agora estabelecer a sua
definição bem como a sua relação com os objectos de 3C .
Definição: Sejam 3, ∈a b . Define-se um vector 2× ∈a b , denominado produto
externo dos vectores a e b , que observa as seguintes propriedades:
( ) ( )
( )( )
ortogonalidade: ,comprimento igual à área: sintriedro dextrorso (ou direito): , ,
θ× ⊥ × ⊥× =
×
a b a a b ba b a ba b a b
Ou seja, o comprimento ×a b é igual à área do paralelogramo correspondente ao
bivector ∧a b . Na figura anexa mostra-se a relação geométrica entre o vector ×a b e o
bivector ∧a b .
Figura 12 O bivector = ∧B a b e o vector ×a b . O produto externo necessita de uma
métrica (neste caso, a métrica euclidiana). O produto exterior é independente de qualquer
métrica.
( ) ( ) 22 2 2 2∧ = ⋅ − = − ∧a b a b a b a b
( )2 2 2 2 2∴ × = ∧ = − ⋅a b a b a b a b
×a b
b
a
= ∧B a b

33Álgebra Geométrica do Espaço: Introdução
Nota: Esta última equação pode ser considerada como uma simples expressão do
teorema de Pitágoras.
( ) ( )
( ) ( )
( ) ( )
( )
2 2 22 2
2 2
2 2 22
2
cos sin
teorema desin cos 1
Pitágoras
cos , sin
teorema dePitágoras
θ θ
θ θ
θ θ
= +
→ + =
⋅ = × =
× + ⋅ =
⋅ ⋅→ × =
⋅ ⋅
a a a
a b a b a b a b
a b a b a b
a a a ba b
b a b b
Verifica-se, deste modo, que existe uma relação de dualidade entre o produto externo e
o produto exterior.
( )
( )
3123
23
123
dualidade entre o produtoexterno e o produto exterior
× = − ∧ ∈→
∧ = × ∈
a b a b e
a b a b e ∧
Numa base ortonormada { }1 2 3, ,e e e do espaço linear 3 , com a orientação direita,
pode obter-se o produto externo de acordo com o determinante formal
( ) ( ) ( )1 2 3
1 2 3 2 3 3 2 1 3 1 1 3 2 1 2 2 1 3
1 2 3
produtoexterno
a a a a b a b a b a b a b a bb b b
→ × = = − + − + −e e e
a b e e e .
Tal como o produto exterior o produto externo é anti-simétrico mas, ao contrário deste,
não é associativo.
( ) ( )
anti-simetria:não associatividade:
× = − ×× × ≠ × ×
a b b aa b c a b c
( )cos θ=b a
( )sin θaa
θ
Figura 13 Teorema de Pitágoras.

Carlos R. Paiva 34
Comentário: Na definição do vector ×a b é necessária uma métrica para determinar a
direcção perpendicular ao bivector ∧a b . O bivector ∧a b , porém, é independente de
qualquer métrica.
O espaço linear 3 dotado do produto externo consitui uma álgebra de Lie: o produto
externo não é abeliano (ou comutativo), não é associativo, não tem elemento neutro e
obedece à identidade de Jacobi.
( ) ( ) ( )( ) ( ) ( )
anti-simetria:álgebra de Lie distributividade:
identidade de Jacobi: 0α β α β
× = − ×→ × + = × + ×
× × + × × + × × =
a b b aa b c a b a ca b c b c a c a b
A distributividade no primeiro argumento resulta da anti-simetria:
( ) ( ) ( ) ( ) ( ) ( )α β α β α β α β+ × = − × + = − × − × = × + ×a b c c a b c a c b a c b c .
Usando a regra ( ) ( ) ( )123 123∧ ∧ = ⋅ − ⋅⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦a b c e a b c a c b e deduzida anteriormente e
tendo em consideração a dualidade, vem sucessivamente
( ) ( ) ( ){ }
( ) ( ){ }123 123 123
123 123
× × = − × ∧ = ∧ ∧⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦
= ⋅ − ⋅⎡ ⎤⎣ ⎦
a b c a b c e a b c e e
a b c a c b e e
( ) ( ) ( )regra fundamentaldo produto externo
→ × × = ⋅ − ⋅a b c a c b a b c .
Usando esta regra é fácil verificar quer a não associatividade (no caso geral)
( ) ( ) ( )não associatividadedo produto externo
→ × × − × × = × ×a b c a b c b c a
quer a identidade de Jacobi
35Álgebra Geométrica do Espaço: Introdução
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( ) 0
× × = ⋅ − ⋅⎧⎪
× × = ⋅ − ⋅ ⇒ × × + × × + × × =⎨⎪ × × = ⋅ − ⋅⎩
a b c a c b a b c
b c a a b c b c a a b c b c a c a b
c a b b c a a c b
.
A identidade de Jacobi é, de certa forma, a propriedade que substitui a associatividade
numa álgebra de Lie.
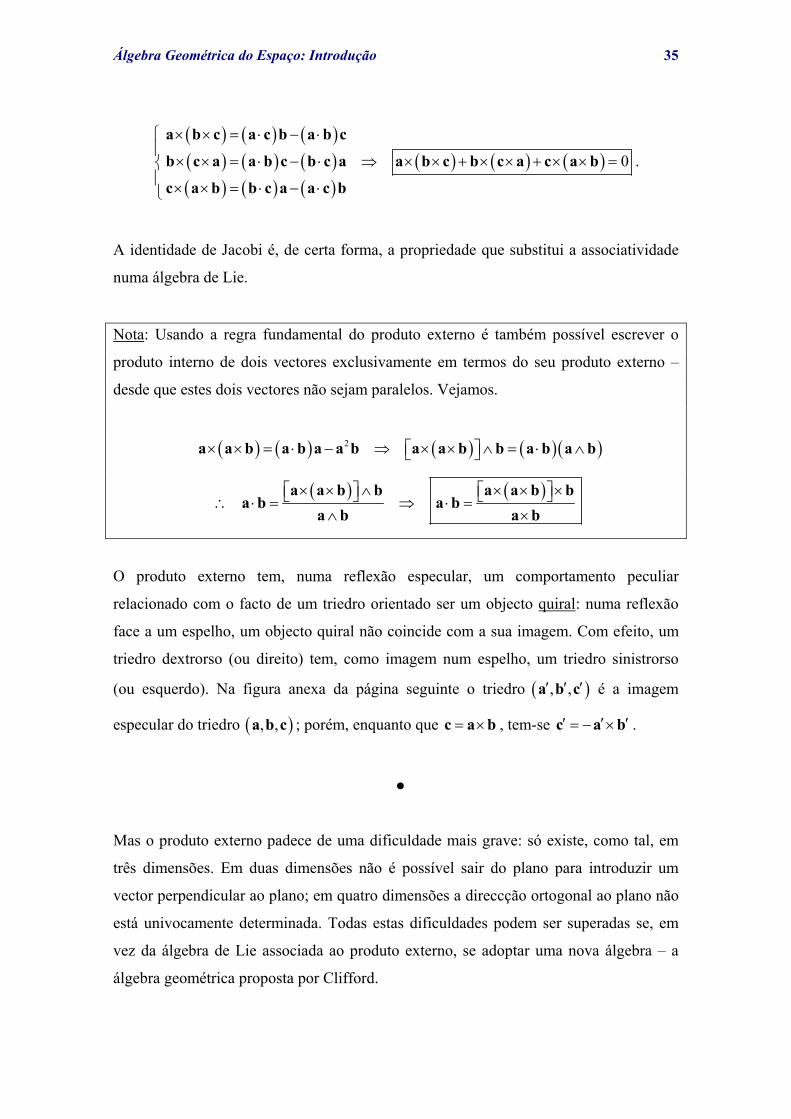
Nota: Usando a regra fundamental do produto externo é também possível escrever o
produto interno de dois vectores exclusivamente em termos do seu produto externo –
desde que estes dois vectores não sejam paralelos. Vejamos.
( ) ( ) ( ) ( )( )2× × = ⋅ − ⇒ × × ∧ = ⋅ ∧⎡ ⎤⎣ ⎦a a b a b a a b a a b b a b a b
( ) ( )× × ∧ × × ×⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦∴ ⋅ = ⇒ ⋅ =∧ ×
a a b b a a b ba b a b
a b a b
O produto externo tem, numa reflexão especular, um comportamento peculiar
relacionado com o facto de um triedro orientado ser um objecto quiral: numa reflexão
face a um espelho, um objecto quiral não coincide com a sua imagem. Com efeito, um
triedro dextrorso (ou direito) tem, como imagem num espelho, um triedro sinistrorso
(ou esquerdo). Na figura anexa da página seguinte o triedro ( ), ,′ ′ ′a b c é a imagem
especular do triedro ( ), ,a b c ; porém, enquanto que = ×c a b , tem-se ′ ′ ′= − ×c a b .
●
Mas o produto externo padece de uma dificuldade mais grave: só existe, como tal, em
três dimensões. Em duas dimensões não é possível sair do plano para introduzir um
vector perpendicular ao plano; em quatro dimensões a direccção ortogonal ao plano não
está univocamente determinada. Todas estas dificuldades podem ser superadas se, em
vez da álgebra de Lie associada ao produto externo, se adoptar uma nova álgebra – a
álgebra geométrica proposta por Clifford.
Carlos R. Paiva 36
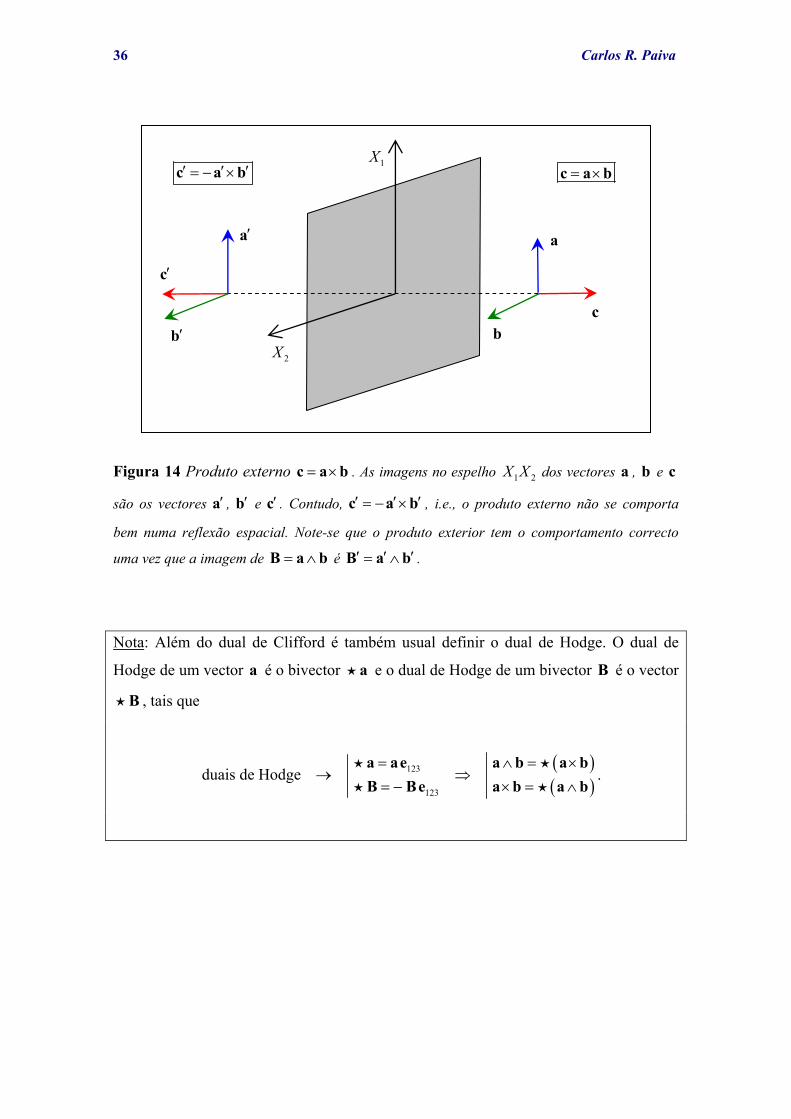
Figura 14 Produto externo = ×c a b . As imagens no espelho 1 2X X dos vectores a , b e c
são os vectores ′a , ′b e ′c . Contudo, ′ ′ ′= − ×c a b , i.e., o produto externo não se comporta
bem numa reflexão espacial. Note-se que o produto exterior tem o comportamento correcto
uma vez que a imagem de = ∧B a b é ′ ′ ′= ∧B a b .
Nota: Além do dual de Clifford é também usual definir o dual de Hodge. O dual de
Hodge de um vector a é o bivector aø e o dual de Hodge de um bivector B é o vector
Bø , tais que
( )( )
123
123
duais de Hodge= ∧ = ×
→ ⇒= − × = ∧
a ae a b a bB Be a b a b
ø ø
ø ø.
1X
2X
a ′a
= ×c a b
b′b
′ ′ ′= − ×c a b
c
′c

37Álgebra Geométrica do Espaço: Introdução
Nota importante: O produto externo, tal como aqui definido, só existe em 3 . Com
efeito, este é o único espaço onde o dual de um bivector é um vector. É, no entanto,
possível generalizar o conceito de produto externo para espaços de maior dimensão: é o
caso do espaço 7 onde é possível tal generalização para o produto externo de dois
vectores como se mostra nas páginas 96-98 do livro
Pertti Lounesto, Clifford Algebras and Spinors (Cambridge: Cambridge
University Press, 2nd ed., 2001).
Porém, em 7 , tal generalização do produto externo não verifica a identidade de Jacobi
e, consequentemente, não permite construir uma álgebra de Lie (ao contrário de 3 ).
O produto externo tem, tradicionalmente, relevância no chamado produto misto de três
vectores 3, , ∈a b c e que se representa por α = ⋅ ×a b c .
Nota: Não existe ambiguidade na escrita adoptada para o produto misto já que a única
alternativa exequível é ( )α = ⋅ × = ⋅ ×a b c a b c uma vez que ( )⋅ ×a b c não tem sentido.
No âmbito de 3C tal relevância desaparece dado que
( )
( ) ( )
( )
123
123
123
1produto misto2
α = ⋅ × = − ⋅ ∧⎡ ⎤⎣ ⎦
→ = − ∧ + ∧⎡ ⎤⎣ ⎦
= − ∧ ∧
a b c a b c e
a b c b c a e
a b c e
( ) 123
o dual do produtomisto é um trivector
→ ∧ ∧ = ⋅ ×a b c a b c e
1 2 3
1 2 3
1 2 3
a a ab b bc c c
∴ ⋅ × =a b c .

Carlos R. Paiva 38
Ou seja, ⋅ ×a b c corresponde ao volume do paralelepípedo formado pelos três
vectores (Fig. 6).
●
Vamos agora analisar uma aplicação do produto externo: a rotação de um vector ′r r .
Fazendo
1 2 3
1 1 2 2 3 3
2 2 21 2 3
x y z
a a a
a a aα
= + +
= + +
= = + +
r e e e
a e e e
a
verifica-se facilmente que
3 2
3 1
2 1
00
0
a a xA a a y
a a z
A
−⎛ ⎞⎛ ⎞⎜ ⎟⎜ ⎟× = = −⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎝ ⎠⎝ ⎠
a r r
r
.
A equação característica da matriz A é ( )det 0I Aλ − = que conduz a 3 2 0λ α λ+ = . De
acordo com o teorema de Cayley-Hamilton, qualquer matriz quadrada satisfaz a sua
equação característica. Portanto
3 2 3 20 0A Aλ α λ α+ = ⇒ + = .
Daqui infere-se que
( )( )
2 2 2 2
2 1 2
1 , 1, 2, 3,
1 , 0,1, 2,
kk k
kk k
A A k
A A k
α
α
−
+
⎧ = − − =⎪⎨
= − =⎪⎩
…
…
donde

39Álgebra Geométrica do Espaço: Introdução
( ) ( ) ( )2 2 1
0 0 0exp
! 2 ! 2 1 !
k k k
k k k
A A AAk k k
+∞ ∞ ∞
= = =
= = ++∑ ∑ ∑
( ) ( ) ( ) ( )
2 1 2 1
0 01 sin
2 1 ! 2 1 !
k kk
k k
A A Ak k
α αα α
+ +∞ ∞
= =
= − =+ +∑ ∑
( ) ( ) ( )
( ) ( )
( )
2 2 2
20 1
2 2 2
2 20
2
2
12 ! 2 !
12 !
1 cos
k kk
k k
kk
k
A AIk k
A AIk
AI
αα
αα α
αα
∞ ∞
= =
∞
=
= − −
= + − −
= + −⎡ ⎤⎣ ⎦
∑ ∑
∑
( ) ( ) ( )2
2exp sin 1 cosA AA I α αα α
∴ = + + −⎡ ⎤⎣ ⎦ .
Agora, notando que
2 22 3 1 2 1 3
2 2 21 2 1 3 2 3
2 21 3 2 3 1 2
a a a a a aA a a a a a a
a a a a a a
⎛ ⎞− −⎜ ⎟
= − −⎜ ⎟⎜ ⎟− −⎝ ⎠
infere-se, ainda, que se tem
( ) ( )2 2A = × × = ⋅ −r a a r a r a a r .
É então possível definir a seguinte rotação espacial
( )rotação exp A′→ =r r r
que se ilustra na Fig. 15.
Carlos R. Paiva 40
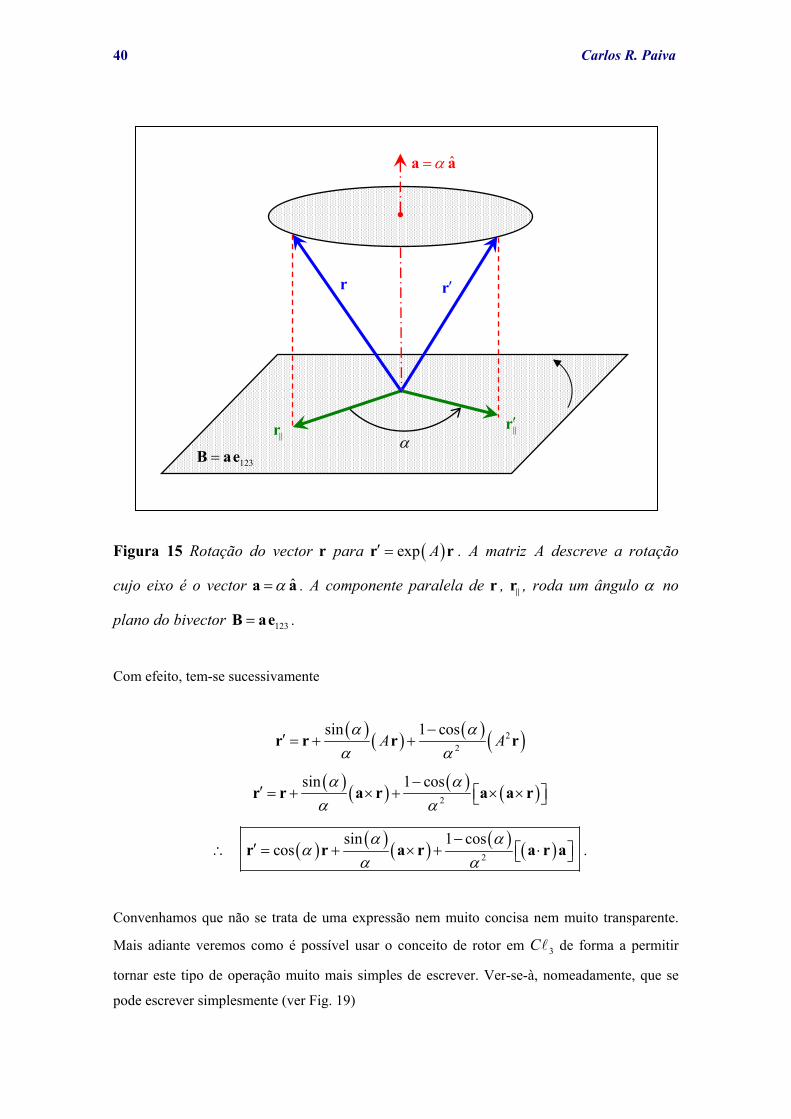
Figura 15 Rotação do vector r para ( )exp A′ =r r . A matriz A descreve a rotação
cujo eixo é o vector ˆα=a a . A componente paralela de r , r , roda um ângulo α no
plano do bivector 123=B ae .
Com efeito, tem-se sucessivamente
( ) ( ) ( ) ( )2
2
sin 1 cosA A
α αα α
−′ = + +r r r r
( ) ( ) ( ) ( )2
sin 1 cosα αα α
−′ = + × + × ×⎡ ⎤⎣ ⎦r r a r a a r
( ) ( ) ( ) ( ) ( )2
sin 1 coscos
α αα
α α−
′∴ = + × + ⋅⎡ ⎤⎣ ⎦r r a r a r a .
Convenhamos que não se trata de uma expressão nem muito concisa nem muito transparente.
Mais adiante veremos como é possível usar o conceito de rotor em 3C de forma a permitir
tornar este tipo de operação muito mais simples de escrever. Ver-se-à, nomeadamente, que se
pode escrever simplesmente (ver Fig. 19)
123=B ae
r ′r
αr ′r
ˆα=a a

41Álgebra Geométrica do Espaço: Introdução
1231exp2
R R
R
′ =
⎛ ⎞= −⎜ ⎟⎝ ⎠
r r
ae.
●
Finalmente, é necessário estabelecer uma precisão importante: o produto externo (usual, i.e., tal
como se definiu no início desta secção) não corresponde exactamente ao dual de Clifford de um
produto exterior como se escreveu atrás. Na verdade a dualidade inscrita nas equações
( )
( )
3123
23
123
dualidade entre o produtoexterno e o produto exterior
× = − ∧ ∈→
∧ = × ∈
a b a b e
a b a b e ∧
não respeita a regra da formação do produto externo numa involução espacial em que se
altera a orientação do espaço fazendo
1 1 1
2 2 2 123 1 2 3 123
3 3 3
involução espacial′ = −′ ′ ′ ′ ′→ = − ⇒ = ∧ ∧ = −′ = −
e e ee e e e e e e ee e e
( ) ( )123 123simetria ímpar ′ ′ ′ ′ ′ ′→ = × = − ∧ = ∧ = − × = −c a b a b e a b e a b c .
Nota: Uma involução espacial coincide, na álgebra 3C , com uma involução de grau, i.e.,
tem-se ′ =a a .
Com efeito, de acordo com esta involução espacial, deveria ter-se
( ) ( )simetria par ′ ′ ′→ = × = − × − =c a b a b c
de acordo com (a interpretação passiva)
Carlos R. Paiva 42
1 2 3 1 2 3 1 2 3
1 2 3 1 2 3 1 2 3
1 2 3 1 2 3 1 2 3
a a a a a a a a ab b b b b b b b b
′ ′ ′ ′ ′ ′= × = = − − − = =′ ′ ′ − − −
e e e e e e e e ec a b c .
Nota importante: Estas considerações mostram que a definição
( ) 123× = − ∧a b a b e
não está de acordo com a definição tradicional do produto externo. Nesta nova
definição (dentro da álgebra geométrica e baseada na dualidade de Clifford) o produto
externo tem uma simetria ímpar numa involução espacial; na definição tradicional o
produto externo tem uma simetria par numa involução espacial.
Devido a este tipo de comportamento assimétrico do produto externo (definido
tradicionalmente), há autores que falam de “vectores polares” ou “vectores verdadeiros”
e de “vectores axiais” ou “pseudovectores”. Na realidade, tal distinção só é necessária
devido à assimetria do produto externo numa involução espacial. Ao eliminar a
definição tradicional tal ambiguidade desaparece: na álgebra geométrica todos os
vectores são “polares”. Note-se, contudo, que as considerações da Fig. 14 continuam
válidas, i.e., permanece uma assimetria intrínseca (ou quiral) relacionada com as
reflexões especulares em ambas as definições de produto externo.
Nota: Facilmente se verifica que a simetria par da definição tradicional de produto
externo coincide com a simetria (também) par dos bivectores numa involução espacial.
Isto mostra que o papel tracionalmente reservado aos “vectores axiais” deve ser
desempenhado pelos correspondentes bivectores. O “pseudoescalar” tradicional (não
confundir com o trivector da álgebra 3C ) associado ao produto misto α = ⋅ ×a b c deve
agora ser desempenhado pelo trivector = ∧ ∧V a b c . No âmbito da nova definição de
produto externo, com efeito, o produto misto tem uma simetria par (numa involução
espacial) – o que mostra que se trata de um escalar verdadeiro; só na definição
tradicional de produto misto é que, numa involução espacial, se observa uma simetria
ímpar.
43Álgebra Geométrica do Espaço: Introdução
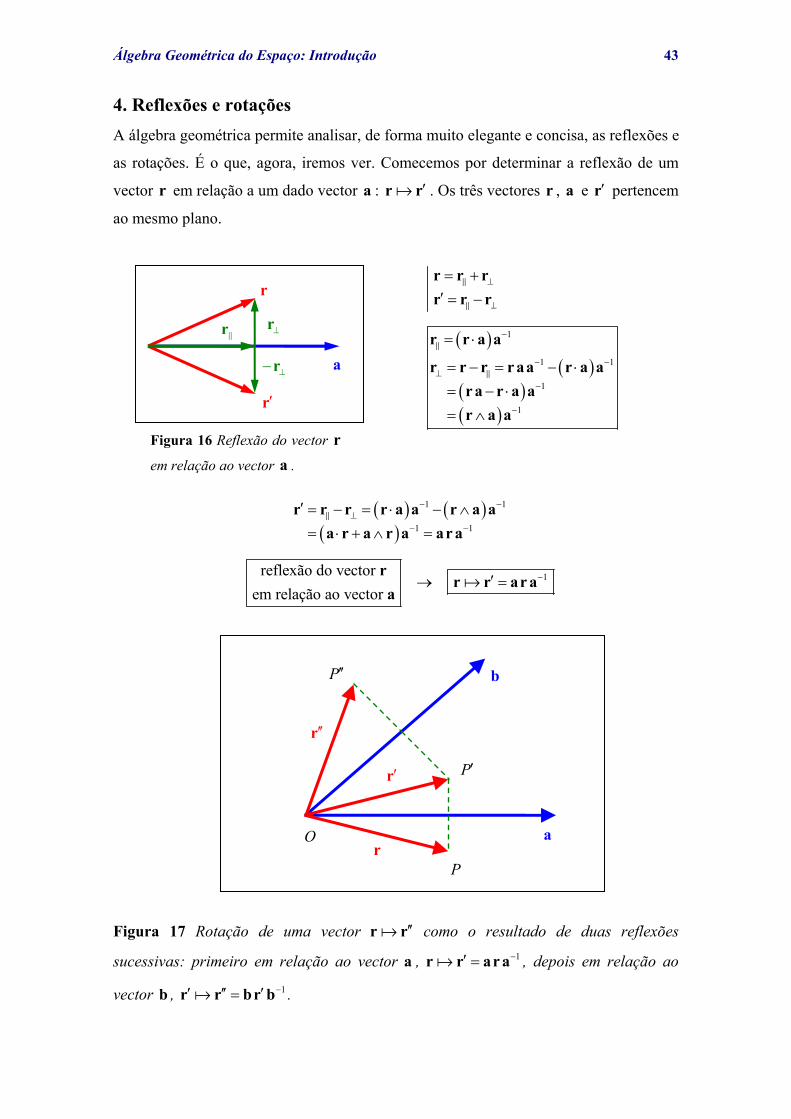
4. Reflexões e rotações A álgebra geométrica permite analisar, de forma muito elegante e concisa, as reflexões e
as rotações. É o que, agora, iremos ver. Comecemos por determinar a reflexão de um
vector r em relação a um dado vector a : ′r r . Os três vectores r , a e ′r pertencem
ao mesmo plano.
⊥
⊥
= +′ = −
r r rr r r
( )( )
( )( )
1
1 1
1
1
−
− −⊥
−
−
= ⋅
= − = − ⋅= − ⋅= ∧
r r a a
r r r r aa r a ar a r a ar a a
( ) ( )
( )
1 1
1 1
− −⊥
− −
′ = − = ⋅ − ∧= ⋅ + ∧ =
r r r r a a r a aa r a r a ar a
1reflexão do vector em relação ao vector
−′→ =r
r r ar aa
Figura 17 Rotação de uma vector ′′r r como o resultado de duas reflexões
sucessivas: primeiro em relação ao vector a , 1−′ =r r ar a , depois em relação ao
vector b , 1−′ ′′ ′=r r br b .
r
′r
a
r ⊥r
⊥−r
a
b
O
P
P′
P′′
r
′′r
′r
Figura 16 Reflexão do vector rem relação ao vector a .

Carlos R. Paiva 44
Uma rotação do vector r para o vector ′′r pode ser analisada como a combinação de
duas reflexões sucessivas – tal como se indica na Fig. 17. Note-se que
( )2 cos 2α′⋅ =r r r e ( )2 cos 2β′ ′′⋅ =r r r . Logo, fazendo ( )cos 2θ⋅ =a b a b , vem
2θ α β= + . Infere-se, deste modo, que
( ) ( )22o ângulo entre e é ocos 2 2 cos
dobro do ângulo entre e α β θ
′′′′→ ⋅ = + =
r rr r r r
a b.
A rotação ′′r r de um ângulo θ , em que ( )2 ,θ = a b , é então tal que
( ) ( ) ( )
1 1
11 1
− −
−− −
′ ′′ ′= =
′′∴ = =
r r ar a r br b
r b ar a b ba r ba
uma vez que ( ) 1 1 1− − −=ba a b . No caso de os vectores a e b serem vectores unitários,
i.e., ˆ=a a e ˆ=b b com 2 2ˆˆ 1= =a b , vem 1ˆ ˆ− =a a e 1ˆ ˆ− =b b . Mas então
ˆ ˆ
ˆˆR
R RR
=′′⇒ =
=
bar r r
ab
ˆˆˆ ˆ ˆ ˆ ˆ ˆˆ ˆ ˆ cos sin expˆ 2 2 2ˆ
θ θ θ∧ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= → = ⋅ + ∧ = + =⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠∧
a bB ab a b a b B Ba b
ˆ ˆ ˆ ˆˆ ˆexp exp2 2
R Rθ θ⎛ ⎞ ⎛ ⎞= = ⇒ = = −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
ab B ba B .
Ao multivector R , tal que 1R R = e que permite determinar ′′r a partir de r , dá-se o
nome de rotor.
rotação de para
ˆ ˆatravés do rotor R R
R
′′′′→ =
=
r rr r r
ba
45Álgebra Geométrica do Espaço: Introdução
Nota importante: Como o vector r se encontra no plano definido pelo bivector B̂ ,
verifica-se que r anti-comuta com B̂ . Com efeito,
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ0
= + ∧ = = − = − − ∧ = −r B r B r B r B B r B r B r Br
R R∴ =r r .
Mas então, ainda se pode escrever,
( )2 ˆexpR θ′′ = = −r r r B r .
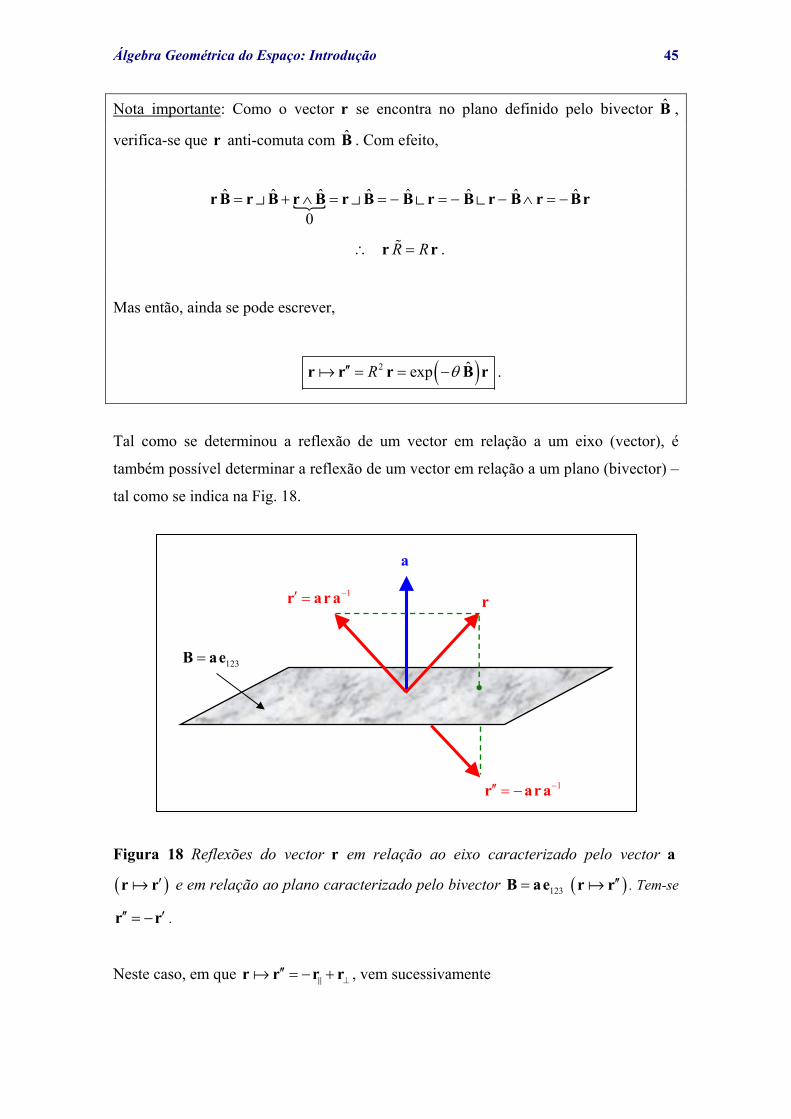
Tal como se determinou a reflexão de um vector em relação a um eixo (vector), é
também possível determinar a reflexão de um vector em relação a um plano (bivector) –
tal como se indica na Fig. 18.
Figura 18 Reflexões do vector r em relação ao eixo caracterizado pelo vector a
( )′r r e em relação ao plano caracterizado pelo bivector 123=B ae ( )′′r r . Tem-se
′′ ′= −r r .
Neste caso, em que ⊥′′ = − +r r r r , vem sucessivamente
a
r1−′ =r ar a
1−′′ = −r ar a
123=B ae
Carlos R. Paiva 46
( ) ( )( ) ( ) ( ) ( )
11123 123
1 1 1123 123 123 123
1
−−
− − −
−
′′ = − = −
= − =
= −
r ar a Be r Be
Be r e B Be r e B
Br B
1
123
reflexão do vector emrelação ao bivector
−′′→ = −=r
r r Br BB ae
.
Note-se que, fazendo ˆβ=B B em que 2ˆ 1= −B , ainda vem
1ˆ ˆ ˆ ˆ− ′′= − ⇒ =B B r r Br B .
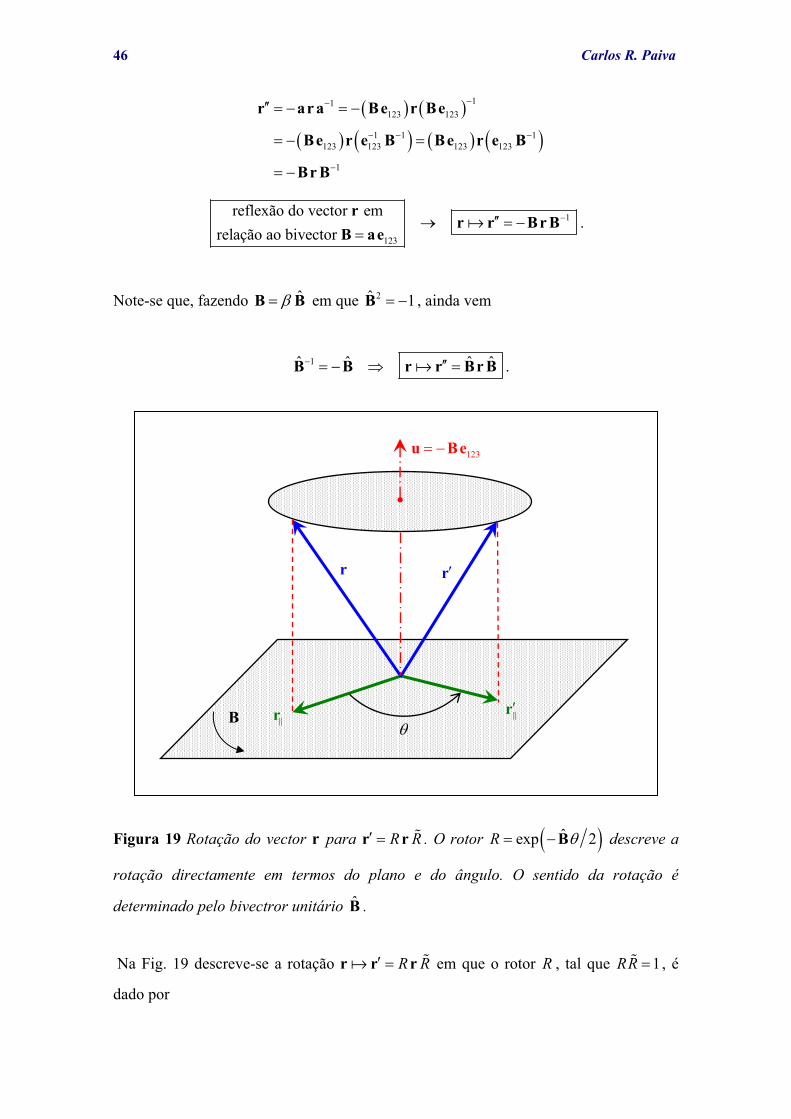
Figura 19 Rotação do vector r para R R′ =r r . O rotor ( )ˆexp 2R θ= −B descreve a
rotação directamente em termos do plano e do ângulo. O sentido da rotação é
determinado pelo bivectror unitário B̂ .
Na Fig. 19 descreve-se a rotação R R′ =r r r em que o rotor R , tal que 1RR = , é
dado por
B
r ′r
θr ′r
123= −u Be

47Álgebra Geométrica do Espaço: Introdução
2ˆ ˆ ˆ1 exp cos sin2 2 2
R θ θ θ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= − → = − = −⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠
B B B .
Nota: A demonstração de que 1RR = é imediata. Vem
( )( )~ 2 2ˆ ˆ ˆ ˆ ˆ ˆˆ ˆ ˆ ˆ ˆ ˆ 1R R R= ⇒ = = = =ba ba ba baab a b .
As rotações conservam o comprimento dos vectores rodados. A prova é imediata:
suponhamos que 1 1 1R R′ =r r r e 2 2 2R R′ =r r r . Vem sucessivamente
( ) ( )
( ) ( ) ( )( )
1 2 1 2 2 1 1 2 2 1
1 2 2 1 1 2 2 1 1 2
1 2
1 12 21 12 2
.
R RR R R RR R
R R R R R R RR
′ ′ ′ ′ ′ ′⋅ = + = +
= + = + = ⋅
= ⋅
r r r r r r r r r r
r r r r r r r r r r
r r
O rotor ˆ ˆR = ba pode ser determinado com base na expressão
( )
22
construção do rotor ˆ ˆ1ˆ ˆˆ ˆ a partir de ˆ ˆ2 1
R RR R
+→ = ⇒ =
= + ⋅
nmnmnm n m
.
Com efeito, dado que 1RR = , vem ( ) 2 1R R R R+ = + . Mas, por outro lado, é
02R R R+ = . Assim, vem efectivamente
( )( )2
2 20 0 0 0
ˆ ˆ ˆ ˆ1 1ˆ ˆ ˆ ˆ1 1 1 12 2 4 2
RR RRR R R R
+ ++ + + ⋅= = ⇒ = = =
nm mnnm n m
( )0
ˆ ˆ ˆ ˆ1 12 ˆ ˆ2 1
R R+ ⋅ +∴ = ⇒ =
+ ⋅
n m nmn m
.
Logo, tem-se

Carlos R. Paiva 48
( )
ˆ ˆ1 ˆ ˆ ˆˆ exp cos sin2 2 2ˆ ˆ2 1
R θ θ θ+ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= = = − = −⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠+ ⋅
nm ba B Bn m
( )
( )
ˆ ˆ1cos2 ˆ ˆ2 1
ˆ ˆˆ sin2 ˆ ˆ2 1
θ
θ
+ ⋅⎛ ⎞ =⎜ ⎟⎝ ⎠ + ⋅
∴∧⎛ ⎞ =⎜ ⎟
⎝ ⎠ + ⋅
n mn m
m nBn m
.
Nota: A expressão
( )
ˆ ˆ ˆ ˆ1 1ˆˆ cos2 2ˆ ˆ2 1θ + ⋅ + ⋅⎛ ⎞⋅ = = =⎜ ⎟⎝ ⎠ + ⋅
n m n ma bn m
não é mais do que uma variante de
( )1 coscos
2 2θθ +⎛ ⎞ =⎜ ⎟
⎝ ⎠
uma vez que ( )ˆ ˆ cos θ⋅ =m n . Por outro lado, a expressão
( )ˆ ˆˆ sin
2 ˆ ˆ2 1θ ∧⎛ ⎞ =⎜ ⎟⎝ ⎠ + ⋅
m nBn m
não é mais do que uma variante de
( )
ˆˆ ˆ ˆˆsinsin
2θ θ
∧ ∧= =
⎛ ⎞⎜ ⎟⎝ ⎠
a b m nB .

49Álgebra Geométrica do Espaço: Introdução
5. Considerações finais
A álgebra geométrica do espaço, a álgebra 3C , foi desenvolvida a partir do produto
geométrico de dois vectores. Existe uma relação entre a álgebra geométrica (de Clifford)
3C e a álgebra exterior (de Grassmann) – a álgebra
2 3
3 3 3 3= ⊕ ⊕ ⊕∧ ∧ ∧ .
Hermann Günter Grassmann (1809-1877)
William Kingdon Clifford (1845-1879)
Essa relação é que ambas as álgebras são associativas e os respectivos subespaços são
os mesmos. Contudo, apenas se define o produto exterior na álgebra de Grassmann, i.e.,
nesta álgebra não se define o produto geométrico. Isto significa, por exemplo, que não é
possível definir o inverso de um vector a em 3∧ , embora – tal como se viu – isso
seja possível em 3C . A diferença tem essencialmente a ver com o seguinte:
Carlos R. Paiva 50
( )sin θ∧ = ≤
= ⋅ + ∧ =a b a b a bab a b a b a b
.
Com efeito, em 3C tem-se
2 2 2 22 20 0
uu u u
u=
⇒ = = = = = ==
abab abba abba a b a b
ba.
A contrapartida é que o produto geométrico depende da métrica através do produto
interno; o produto exterior não depende de qualquer métrica. Ou seja: a álgebra 3C
depende da métrica (euclidiana); 3∧ é independente da métrica definida em 3 , i.e.,
pode ser estabelecida mesmo que sobre 3 não esteja definida sequer uma métrica.
A álgebra de Gibbs, i.e., a álgebra usual do espaço tridimensional é, por sua vez, uma
álgebra de Lie: trata-se da álgebra onde se define o produto externo de dois vectores.
Josiah Willard Gibbs (1839-1903)
Como se viu, a álgebra de Gibbs não é associativa e, assim, não pode ser isomórfica a
uma qualquer álgebra matricial. Além disso, a álgebra de Gibbs é – tal como a álgebra
geométrica – dependente de uma métrica (a métrica euclidiana). A álgebra geométrica
3C também depende da métrica euclidiana mas é possível construir outras álgebras
geométricas com métricas não euclidianas. Por exemplo: para estudar a teoria da
relatividade restrita no espaço-tempo de Minkowski, é possível (e até desejável)
considerar a álgebra geométrica 1,3C com uma métrica lorentziana semi-definida

51Álgebra Geométrica do Espaço: Introdução
(negativa, neste caso). O estudo da teoria da relatividade restrita no âmbito da álgebra
de Gibbs não é natural: em primeiro lugar, porque se trata de uma álgebra
exclusivamente tridimensional (não é possível definir o produto externo usual sem ser
em três dimensões); em segundo lugar, porque é recomendável que seja estabelecida
uma diferença clara entre vectores relativos (a um dado observador) e vectores próprios
(independentes de qualquer observador) e tal distinção só é possível no âmbito da
álgebra geométrica.
Nota: É possível estudar a teoria da relatividade restrita usando a álgebra 3C sem
haver necessidade de recorrer à álgebra 1,3C . Esta é a perspectiva adoptada por Baylis
no livro
William E. Baylis, Electrodynamics – A Modern Geometric Approach (Boston:
Birkhäuser, 1999).
Um acontecimento é descrito como um paravector (designa-se por paravector o
multivector que resulta da soma graduada de um escalar com um vector). Com efeito,
seja a o paravector
31 2 3a c t c t x y z= + = + + + ∈ ⊕r e e e .
Então, introduzindo o seu conjugado de Clifford
31 2 3a c t c t x y z= − = − − − ∈ ⊕r e e e ,
obtém-se o invariante fundamental (que corresponde à invariância do intervalo entre
dois acontecimentos no espaço de Minkowski) ( )( )2s a a c t c t= = + −r r .
2 2 2 2 2 2 2 2 2invariante fundamentalda relatividade restrita
s c t c t x y z→ = − = − − − ∈r

Carlos R. Paiva 52
Vejamos, agora, um isomorfismo entre a álgebra 3C e uma álgebra matricial.
Consideremos a álgebra matricial ( )2 (esta designação significa que se trata de uma
álgebra de matrizes 2 2× definida sobre o corpo ) baseada nas matrizes de spin de
Pauli. Vai-se mostrar o isomorfismo ( )3 2C . As matrizes de Pauli são
1 2 3
0 1 0 1 0, ,
1 0 0 0 1i
iσ σ σ
−⎛ ⎞ ⎛ ⎞ ⎛ ⎞= = =⎜ ⎟ ⎜ ⎟ ⎜ ⎟−⎝ ⎠ ⎝ ⎠ ⎝ ⎠
.
Estas matrizes observam as seguintes propriedades
1 2 3
3 1 2
2 3 1
2 ,j k k j jk
iI i
i
σ σ σσ σ σ σ δ σ σ σ
σ σ σ
=+ = =
=
onde I é a matriz identidade de segunda ordem. O isomorfismo ( )3 2C pode ser
estabelecido com base nas seguintes correspondências:
1 1 2 2 3 3, ,σ σ σe e e .
Nestas circunstâncias, vem então:
Note-se, porém, que existe uma diferença essencial entre estas duas álgebras: na álgebra
3C distigue-se um subespaço particular, o espaço linear (ou vectorial) 3 , no qual o
quadrado de um vector é igual ao quadrado do seu comprimento, i.e., 22 =r r . Esta
( )2
I
1σ 2σ 3σ
2 3σ σ 3 1σ σ 1 2σ σ
1 2 3σ σ σ
3C
1
1e 2e 3e
23e 31e 12e
123e

53Álgebra Geométrica do Espaço: Introdução
propriedade fundadora da álgebra geométrica não tem paralelo na álgebra matricial
( )2 cuja característica distintiva é ser constituída por matrizes hermitianas com traço
nulo.
A álgebra geométrica do espaço, 3C , compreende dois subespaços importantes:
• O subespaço par 3C + , cujos elementos resultam do produto geométrico de um
número par de vectores.
• O subespaço ímpar 3C − , cujos elementos resultam do produto geométrico de um
número ímpar de vectores.
3 3 3C C C+ −= ⊕
Chama-se o centro da álgebra e representa-se por ( )3Cen C , o subespaço constituído
pelos elementos de 3C que comutam com quaisquer elementos de 3C .
( ) { }
{ }
{ }
33
3 1232
33 23 31 12
33 3
3 1 2 3 123
centro da álgebra Cen | ,
subespaço par | , , ,
subespaço ímpar | , , ,
C x y x y
C w x y z w x y z
C x y z w x y z w
+
−
→ = ⊕ = + ∈
→ = ⊕ = + + + ∈
→ = ⊕ = + + + ∈
e
e e e
e e e e
∧
∧
∧
Quer o centro da álgebra quer o seu subespaço par constituem, também, subálgebras.
Como é fácil de verificar o subespaço ímpar não constitui uma álgebra: por exemplo, o
produto geométrico de dois vectores dá, no caso geral, um multivector que contém um
escalar e um bivector e que pertencem à subálgebra par. O corpo (dos complexos) e
o anel de divisão H (dos quaterniões de Hamilton) são isomórficos a subálgebras
específicas de 3C : ( )3Cen C e 3C +H .
( )
33
3
23
3
Cen C
C +
= ⊕
= ⊕H
∧
∧
Carlos R. Paiva 54
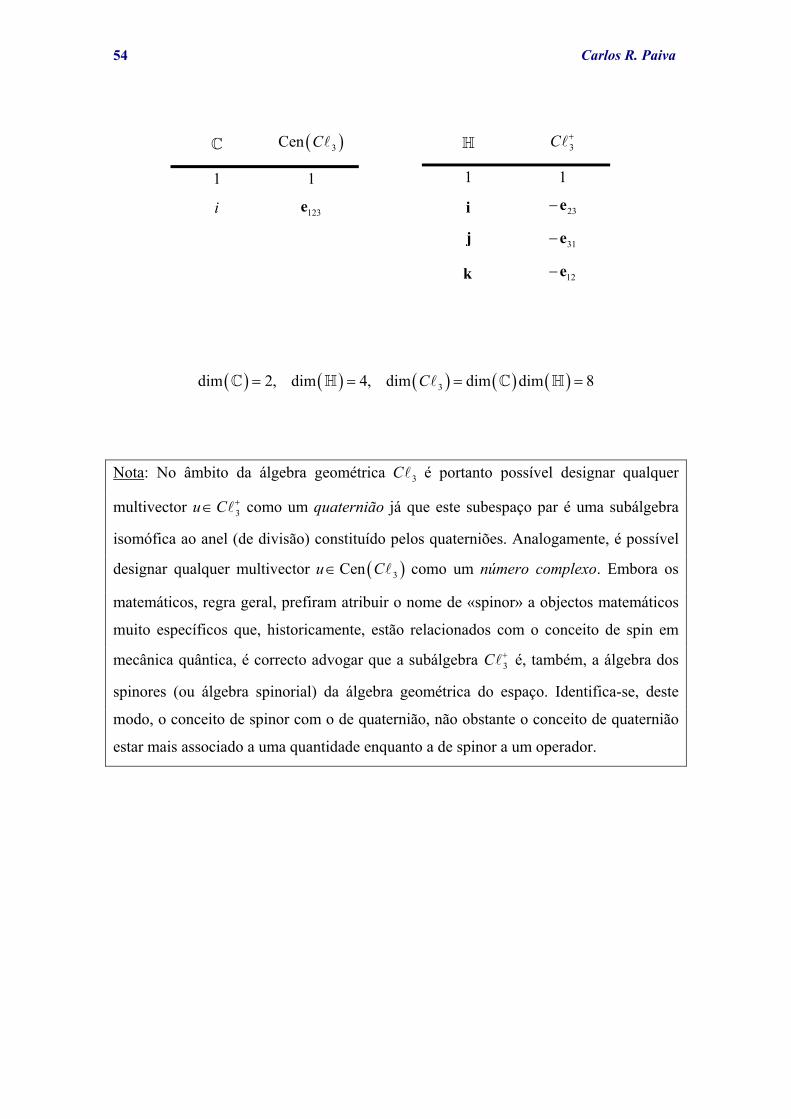
( ) ( ) ( ) ( ) ( )3dim 2, dim 4, dim dim dim 8C= = = =H H
Nota: No âmbito da álgebra geométrica 3C é portanto possível designar qualquer
multivector 3u C +∈ como um quaternião já que este subespaço par é uma subálgebra
isomófica ao anel (de divisão) constituído pelos quaterniões. Analogamente, é possível
designar qualquer multivector ( )3Cenu C∈ como um número complexo. Embora os
matemáticos, regra geral, prefiram atribuir o nome de «spinor» a objectos matemáticos
muito específicos que, historicamente, estão relacionados com o conceito de spin em
mecânica quântica, é correcto advogar que a subálgebra 3C + é, também, a álgebra dos
spinores (ou álgebra spinorial) da álgebra geométrica do espaço. Identifica-se, deste
modo, o conceito de spinor com o de quaternião, não obstante o conceito de quaternião
estar mais associado a uma quantidade enquanto a de spinor a um operador.
( )3Cen C
1 1
i 123e
H 3C +
1 1
i 23−e
j 31−e
k 12−e
55Álgebra Geométrica do Espaço: Introdução
Nota: Na literatura matemática é comum a identificação entre «espaço linear» e «espaço
vectorial». Em álgebra geométrica, porém, impõe-se uma distinção entre os dois
conceitos uma vez que o produto geométrico entre vectores vem alterar, de forma
radical, o próprio conceito de vector tornando-o mais específico do ponto de vista
geométrico. Assim, em álgebra geométrica, considera-se que um espaço vectorial é um
espaço linear de vectores. O termo espaço linear fica reservado, apenas, para o conceito
mais geral. Neste sentido a álgebra 3C é um espaço linear mas não é um espaço
vectorial; o subespaço 33C⊂ é um espaço vectorial mas não é uma subálgebra. A
álgebra geométrica do plano, a álgebra 2C , é um espaço linear de dimensão quatro
( )2
2 2 22 2dim 2 4C C= ⊕ ⊕ → = =∧
mas não é um espaço vectorial. Note-se, porém, que o subespaço ímpar 22C − = é o
espaço vectorial dentro do espaço linear constituído pela álgebra geométrica do plano;
não constitui, porém, uma subálgebra. Já o subespaço par 2
22C + = ⊕∧ é uma
subálgebra mas não é um espaço vectorial. No caso da álgebra 2C , o subespaço 2C +
constitui a álgebra spinorial respectiva e que é identificável à álgebra dos complexos
através da identificação 12i e . O elemento 12 1 2 1 2 1 2 1 2= ∧ = ⋅ + ∧ =e e e e e e e e e é o
pseudoescalar (ou bivector) unitário da álgebra. Note-se, porém, que existe uma
distinção importante entre enquanto corpo e 2C + enquanto álgebra real (i.e,
definida sobre o corpo ): dado um vector 2∈a , enquanto que i i=a a já, por outro
lado, 12 12= −ae e a . Note-se que ( )2Cen C = . Com efeito,
( )
( )12 1 1 2 2 12 2 1 1 2
1 1 2 212 12 1 1 2 2 2 1 1 2
a a a aa a
a a a a= + = − +
= + →= + = −
ae e e e e ea e e
e a e e e e e.

Carlos R. Paiva 56
Sir William Rowan Hamilton (1805-1865)
Adenda: Os quaterniões de Hamilton Hamilton inventou os quaterniões em 1843. Os quaterniões são números
hipercomplexos da forma
( ) { }dim 4 1, , , baseq w ix j y zk i j k= + + + ∈ → = ← ←H H
em que , , ,w x y z∈ e as unidades imaginárias generalizadas i , j , k satisfazem as
relações
2 2 2 1
, ,i j ki j ji k jk k j i ki ik j
⎧ = = = −⎨
= − = = − = = − =⎩.
A multiplicação é, por definição, não comutativa – embora seja associativa: H é um
anel de divisão mas não é um corpo (um corpo é um anel de divisão abeliano ou
comutativo). As regras de multiplicação anteriores podem ser sintetizadas na forma
2 2 2 1i j k i jk= = = = − .
Definição:
quaternião conjugadoq w ix j y zk q w ix j y zk= + + + ∈ = − − − ∈ ←H H

57Álgebra Geométrica do Espaço: Introdução
( ) ( )2 2 2 2 2
2 2 2 2 2
12 2 2 2 2
22
2
1
2 0
q w x y z w ix j y k z
q qq w x y zq w ix j y k zq
w ix j y k z w x y zq
q wq q
−
= − − − + + +
= = + + +
− − −= = =
+ + + + + +
∴ − + =
Define-se a parte real ( )Re q w= ∈ e a parte pura ( ) 3Pu q ix j y k z= + + ∈ .
( ) ( ) 30 0notação , Re , Puq q q q q→ = + ∈ = = ∴ = ⊕q qH H
00 0 0 0
0
a aa b a b a b
b b= + ∈⎧
⇒ = − ⋅ + + + ×⎨ = + ∈⎩
aa b b a a b
bHH
( ) ( ) ( )
( )
1 2 30 0
1 2 3
1 1 2 2 3 3
2 3 3 2 3 1 1 3 1 2 2 1
0 quaterniões puros
Pu produto externo de Gibbs
a a aa b
b b b
a b a b a ba b a b a b a b a b a b
= + + ⎫⎧ ⎪= = ⇒ ←⎨ ⎬= + + ⎪⎩ ⎭⋅ = + +⎧⎪
⎨ × = − + − + −⎪⎩∴
= − ⋅ + × ⇒ × = ←
a i j kb i j k
a ba b i j k
ab a b a b a b ab
Nota histórica: O produto externo foi introduzido por
Gibbs em 1901. A escrita usual das equações de
Maxwell (1831-1879) é, portanto, posterior ao próprio
Maxwell.
Carlos R. Paiva 58
Hamilton’s choice of the name quaternion is unfortunate, for the name merely refers to
the comparatively insignificant fact that the quaternions compose a linear space of four
dimensions. The name quaternion diverts attention from the key fact that Hamilton had
invented a geometric algebra. (…) Quaternions today reside in a kind of mathematical
limbo, because their place in a more general geometric algebra is not recognized. The
prevailing attitude toward quaternions is exhibited in a biographical sketch of Hamilton
by the late mathematician E. T. Bell. The sketch is titled “An Irish Tragedy”, because
for the last twenty years of his life, Hamilton concentrated all his enormous
mathematical powers on the study of quaternions in, as Bell would have it, the quixotic
belief that quaternions would play a central role in the mathematics of the future.
Hamilton’s judgement was based on a new and profound insight into the relation
between algebra and geometry. Bell’s evaluation was made by surveying the
mathematical literature nearly a century later. But union with Grassmann’s algebra
puts quaternions in a different perspective. It may yet prove true that Hamilton looking
ahead saw further than Bell looking back. (…) By the end of the 19th century a lively
controversy had developed as to which system was more suitable for the work of
theoretical physics, the quaternions or vector algebra. A glance at modern textbooks
shows that the votaries of vectors were victorious. However, quaternions have
reappeared disguised as matrices and proved to be essential in modern quantum
mechanics. The ironic thing about the vector-quaternion controversy is that there was
nothing substantial to dispute. (…) The whole controversy was founded on the failure of
everyone involved to appreciate the distinction between vectors and bivectors. Indeed,
the word “vector” was originally coined by Hamilton for what we now call a bivector.
Gibbs changed the meaning of the word to its present sense, but no one at the time
understood the real significance of the change he had made.
David Hestenes‡
‡ New Foundations for Classical Mechanics, Kluwer Academic Publishers, Dordrecht, 2nd ed., pp. 59-61 1999.
59Álgebra Geométrica do Espaço: Introdução
P. Lounesto, Clifford Algebras and Spinors (Cambridge, UK: Cambridge
University Press, 2nd ed., 2002)
C. Doran and A. Lasenby, Geometric Algebra for Physicists (Cambridge, UK:
Cambridge University Press, 2003)
D. Hestenes, New Foundations for Classical Mechanics (Dordrecht, The
Netherlands: Kluwer Academic Publishers, 2nd ed., 1999)
D. Hestenes and G. Sobczyk, Clifford Algebra to Geometric Calculus: A Unified
Language for Mathematics and Physics (Dordrecht: Kluwer Academic Publishers,
1984)
L. Dorst, D. Fontijne, and S. Mann, Geometric Algebra for Computer Science
(Amsterdam: Morgan Kaufmann Publishers, Elsevier, 2007)
B. Jancewicz, Multivectors and Clifford Algebra in Electrodynamics (Singapore:
World Scientific, 1988)
David Orlin Hestenes (1933-)
http://modelingnts.la.asu.edu/GC_R&D.html
http://physics2.asu.edu/faculty.php?name=hestenes&sort