edic research proposal 1 bridging workplace learning … exam/candidacy... · activities. this...
TRANSCRIPT
EDIC RESEARCH PROPOSAL 1
Bridging Workplace Learning with VocationalEducation: An Augmented Reality Environment for
the Understanding of StaticsNikolaos Maris
CRAFT, I&C, EPFL
Abstract—Carpenters need to apply an intuitive understandingof structural mechanics at the workplace. However, school’stheory is neither well understood nor linked with the workplaceactivities. This proposal seeks to use the workplace experiencefor the benefit of the classroom activities. A questionnaire onunderstanding structural mechanics was deployed in classroomsof carpenter apprentices that highlighted the lack of under-standing a specific concept. We propose an augmented realityenvironment to practice mantling, stressing and dismantling ofstructures found in the workplace and a methodology to evaluateits effectiveness in classroom.
Index Terms—Human Computer Interaction, Tangible Inter-faces, Assessment, Learning
INTRODUCTION
In professions like mechanical and civil engineering, linkingtheory of statics with engineering practice in the analysis anddesign of mechanical systems is a challenging task [1]. Teach-ing statics to engineers is usually done by writing and solvingequilibrium equations based on a known free body diagram,and constructing free body diagrams for textbook problems inwhich the forces and moments at supports and connections arelargely implied by standard symbols in the problem diagrams.Although the carpenter’s curriculum avoids the mathematical
Proposal submitted to committee: August 21st, 2012; Can-didacy exam date: August 28th, 2012; Candidacy exam com-mittee: Ian Smith, Pierre Dillenbourg, Mark Pauly.
This research plan has been approved:
Date: ————————————
Doctoral candidate: ————————————(name and signature)
Thesis director: ————————————(name and signature)
Doct. prog. director:————————————(R. Urbanke) (signature)
EDIC-ru/05.05.2009
details, it maintains the same level of abstraction with teachingstatics to engineers without connecting it with students’ expe-rience with physical reality. Additionally, structural analysisas a task has been offloaded to computational solutions likeFinite Element Analysis done with Computer Aided Designtools, thus attention on pragmatic teaching of statics has beenneglected. Halloun et al. [2] found that physics students haveparticular difficulty in appreciating the existence of forcesbetween unmoving, relatively rigid, inanimate objects. Instatics, forces appear in a much wider variety of circumstances,as compared with Newtonian physics. Unfortunately, the vastmajority of forces of interest to statics, between objects andtheir supports or between connected objects, are precisely suchcontact forces [3].
Carpenter apprentices need a intuitive understanding ofstructural mechanics for their workplace activities which isnot found in the theory that is taught at school. For example,a structure under construction should not suddenly collapse.On one hand, the examples taught at school teach basicconcepts and, thus, they seem irrelevant when compared withthe real structures found in the workplace [4]. On the otherhand, structural mechanics cannot be taught by trial-and-errortechniques in the workplace for obvious safety and economicreasons.
We propose an Augmented Reality (AR) environment toanalyze real structures in classroom and study its effectivenessfor understanding structural mechanics. Apart from evaluatingquantitatively the potential learning gain, we seek to use theworkplace experience for the benefit of the classroom activitiesand vice versa.
This proposal continues with a description of the contextand related work and is based on three publications. Paper 1identifies the context in terms of the cognitive difficulties inthe understanding of structural mechanics, so that we knowwhich concepts should be taught with care. Paper 2 providesa pedagogical design model in order to design a pedagogicalscenario and apply it effectively. Paper 3 describes an aug-mented reality environment for 3D modelling whose approachwe can use for structural analysis. Then, we describe our fieldstudy, a pedagogical scenario, two alternative approaches forthe educational technology, an evaluation methodology and aroadmap for the research to follow.

EDIC RESEARCH PROPOSAL 2
Context
Switzerland stands out as the European country with oneof the highest proportions of students choosing a VocationalEducation and Training (VET) programme after coming out ofcompulsory education (around 60% according to the FederalStatistical Office [5]). The common form of vocational educa-tion is an apprenticeship of 3 to 4 years split in 3-4 days perweek in an enterprise and 1-2 days per week in school classes.A strength of the Swiss VET system is the active role of theemployers [6]. The professional association of each branch,through its representatives, plays a key role not only in trainingbut also in curriculum formation.
Our focus is on training students with the skills andknowledge to become professional carpenters, for exampleconstructing and maintaining load-bearing wooden structureslike roofs and stairs. In 2013, a reformed curriculum [7] willbe applied which changes the curriculum from 3 to 4 years andincludes new approaches on renovation and dismantling. Thestudents will continue to work 4 days per week in an enter-prise. A carpenter with a few years of experience can continueon Professional Education and Training to foreman carpenterand then to master carpenter whose competencies includedrawing normal, shear and moment diagrams and drawingusing a Computer Aided Design (CAD) tool. A carpentershould be able to understand the drawings of the foreman orthe master carpenter, dimension the wood appropriately for thegiven joints or framing technique and mantle and dismantle astructure safely.
Related work on teaching statics
To support the teaching of statics, two types of activitieshave been applied in the classroom, namely Tangible User In-terfaces (TUIs) and simulations. Teachers in [8] use their bodyto maintain a grasped object in equilibrium to demonstrateforces and moments with tactile feedback. After recognizingand discriminating the types and directions of forces andmomentum, they recognize interactions between/within bodiesand they relate them to their associated motions and deforma-tions. McCrary et al. [9] connect and manipulate pulleys toshow the theoretical free body diagrams in a physical setting.However, in both types of activities the exercises found in theschool courses are oversimplified compared to the reality ofthe workplace in order to teach the basic concepts. Textbookexamples show interactions of 2-3 bodies in a free bodydiagram whereas the reality corresponds to complicated inter-actions of multiple bodies in a free body diagram. Simulationsof the deformation of simple structures are used by Steif et al.[10] in combination with parameters of the related equations,which is appropriate for some engineering professions but notfor carpenter apprentices.
Related work on tangible interfaces
This proposal builds on our prior experience that TangibleUser Interfaces (TUIs) have shown an added value on gainingkey cognitive skills, like spatial reasoning in the context ofcarpenters [4] (Figure 1) and warehouse layout configuration
in the context of logistics [11], [12]. Our research questionis whether TUIs are effective for understanding structuralmechanics. Bergig et al. [13] state that when concepts inmechanics are explained in a more tangible way, they areeasier to understand. They categorize the possible approachesby starting from text, to sketch, to 2D Virtual Reality (likea Graphical User Interface), to 3D Virtual Reality (VR), toAugmented Reality (AR) and then to laboratory experiments.Sharlin et al. [14] state that the most successful TUIs are“spatial TUIs”, a subset of TUIs that mediate interactionwith shape, space and structure. They suggest matching thenumber of degrees of freedom in the digital application with anaffordable physical interface. However, a spatially incongruentmapping that is given to address a specific need, like theQWERTY keyboard, can be learned well and be also quiteefficient. Additionally, they suggest that a physical/digitalmapping must enable trial-and-error activity like cancelling apast action. Huang et al. [15] specify three types of construc-tion kits augmented with computational media. CAD-CAM isabout designing a model on a computer, doing the fabricationof its parts with a 3D printer and then doing the assembly [16].Camera sensing is about getting a virtual model from a pointcloud of a construction kit. Finally, embedded computing isabout construction kits whose parts include electronic circuitsthat can infer the whole topology [17].
Fig. 1. Assembling the blocks in a way that matches the first team’sorthographic projections
PAPER 1: KEY CONCEPTS ON UNDERSTANDING STATICS
This section describes a study on understanding structuralmechanics [18] which showed that metacognitive prompts re-duced the error rate in representing unknown forces. Studentswere shown a free body diagram and were asked questionslike naming orally the distinct parts and the forces they exerton one another.
Measuring conceptual understanding was done in a previousstudy on 245 students of a statics course [19]. Multiple choicequestions were given to identify the most misunderstoodconcepts that persist even after instruction and to potentially

EDIC RESEARCH PROPOSAL 3
find patterns of errors. That approach on measuring conceptualunderstanding is known as concept inventory and has greatlyinfluenced instructional learning in the context of physics [20].Performance of the Statics Concept Inventory (SCI) correlateswith the grades of 105 students on a statics course.
Experts proceed to a structural analysis of multiple con-nected bodies by translating the interactions between parts ofsystems into the symbols and variables of statics, and thenderiving meaningful relations between the variables based onthe principle of equilibrium. But first of all they have torecognize the distinct parts making up a mechanical systemand find out how they are connected to one another, which isalso a requirement for our carpenter apprentices. An accuraterepresentation of the problem limits the range between thepossible analyses or procedures the student has to apply.Three of the four concept clusters in the SCI involve bodiesand the relations between bodies and forces. The hypothesisof the authors was that by focusing students attention onidentifying which are the bodies and which body exerts whichforce on which body, the students would identify and correcttheir mistakes and thus develop a more complete and relevantconceptual representation of the problem.
To test students’ behaviour, they split 21 college studentsof mechanical or civil engineering who previously completedand passed an introductory statics course (not their course)into an experimental group of 10 that was given metacognitiveprompts and a control group of 11. In the instructionalsession students in the control group were given 3 free bodydiagrams and were asked to analyze them or correct them interms of superfluous and missing forces, the correctness ofrepresentations of unknown forces, the presence or absenceof equal and opposite pairs of forces, and the inclusion ofall relevant equations of equilibrium. The experimental groupwas given the same problems and they were given also thefollowing instructions in each problem accordingly:
1) Name the distinct parts. Where exactly do the partscontact each other; that is, on what surfaces do theytouch?
2) Name all of the parts that are included in the free bodydiagram(s). Name all of the external parts that directlycontact the parts of the free body diagram(s).
3) For each load drawn, name the part that exerts that load.Think about the forces that the parts can exert on oneanother: is each load drawn correctly? Is a contactingbody exerting a force that is not shown on the diagram?If so, where and to what load would it apply?
A tablet was recording the time of each pen stroke, partic-ipant’s speech (they were asked to think aloud) and writtenwork. Students were answering orally to the system andsubmitting their answers for verification and correction. Totest expert’s behaviour, two persons with intermediate levelof experience were recruited as experts have internalizedtheir knowledge and automated their actions, thus they hadincreased self-regulation but decreased metacognition [21].The two persons had served as statics teaching assistants forone mechanical engineering semester for the first author fortwo and four years prior to the study, respectively, but neither
had been students of the author in a statics course. Both wereasked to think aloud and one of them was asked to explainhis solution like if he was explaining it to a student.
To quantify what the students were talking about, a contentanalysis was performed by two experts. Body centered talkswere coded as either identifying an isolated body (e.g. “Ok, sodrawing a free body diagram of member EDA”) or identifyinga body exerting a force (e.g. “There is a pin at D, so that isDx and Dy”). The results of content analysis showed thatalthough the control group displayed less body centered talk,both groups had a substantially lower frequency of errorswhen the relevant body was discussed either with or withoutmetacognitive prompts. The main effect of metacognitiveprompts was the correctness of interaction representations. Theexperimental group had also an increased number of equaland opposite interaction pairs (Newton’s 3rd Law) that wereidentified and drawn.
The authors state that in the experimental group “the relationbetween the bodies, their connection, and the representationwas articulated” although no statistical evidence is providedfor that. However, it is surprising that students of mechanicaland civil engineering hadn’t mastered their focus on identify-ing which body exerts which force on which body and weplan to use these findings for teaching statics to carpenterapprentices.
PAPER 2: PEDAGOGICAL DESIGN
The purpose of applying educational technologies in theclassroom is to increase the students’ learning outcome bycreating a “fertile place” that encourages the emergence ofrich classroom interactions, like negotiating the meaning ofa concept. This section describes if and how the classroominteractions can be constrained to create such a “fertile place”[22]. The authors present a pedagogical design model (with asocial and object structure) and a design principle for macro-script authoring demonstrated by three representative macro-scripts.
The more predictable the classroom dynamics are, the morestrict the interaction constraints can be. We perceive this asa pragmatic point of view on educational research. On onehand, the pedagogical principles need to be kept indepen-dent of the content of the curriculum. On the other hand,strategies are needed in order to deal with the specificitiesof the context when applying a pedagogical design in a realsetting. Computer Supported Collaborative Learning (CSCL)scripts are restricted neither to computer-based activities norto collaborative learning activities, as individual reflection isrequired in order to transform experience into learning. Theyare about constraining interactions and they can be at differentlevels of granularity. Micro-scripts, like prompting a student torespond to an argument with a counter-argument, are dialoguemodels (sequences of activities) which are expected to beinternalized. Macro-scripts impose less strict constraints onthe interactions and their purpose is to create a “fertile place”.Integrative scripts, which are executed in real-time by theteacher [23], deal with unpredictable circumstances, like theinability to form groups of a given number of students.

EDIC RESEARCH PROPOSAL 4
The social structure of any script is composed of stu-dents, groups, roles (for students or groups), the class andunpredictable cases like a missing student. Resources can beexplicit, like documents, tools and responsibilities, or implicitlike “the action of user1 was to select answer2 for question5”and the script mechanism may use both types. The objectstructure is types of resources and products. Resources are pre-defined and they are transformed into “products”. Members ofa group can have the same or different roles. The roles connectpeople with resources by communicating the expectations ofa teacher or a group to the students. Additionally, the rolesconnect people with products by specifying the contributionsexpected from groups or students. Roles can be natural (beforeentering the script) or induced by the script.
A product at a given phase may become a resource foractivities in a later phase, thus a script can be perceived as ahigh level representation of a workflow which recognizes thatstructures evolve over time and should be flexible enough todeal with unpredictable events. Students in a specific phase ofthe script can be represented by a role-group matrix (socialmatrix). Products in a specific phase of the script can berepresented by another role-group matrix (individual productsmatrix). An example of the functionality of an integrativescript is to have a “joker”, an extraneous group member whois allowed to play any role within the group [23]. Matricesbetween consecutive phases are transformed by operators likethe following:
• The group formation operator and the rotation operatortransform the roles within groups.
• The aggregation operator transforms products producedby the group members to resources for the group orresources for the teacher.
The design principle for encouraging the emergence ofrich classroom interactions is called “Split Where Interac-tion Should Happen” (SWISH). Increasing the collaborativeeffort requires more intensive and rich interactions to main-tain/restore collaboration. However, if the collaborative effortis too high, undesirable effects may appear, like a big percent-age of free riders. The authors measure collaborative effort asthe disagreement between the individuals within a group (asa percentage ∆ of different answers in a given questionnaire),whereas the disagreement between the individuals within aclass and the disagreement between the groups in a class areproposed as measures of collaborative effort for integrativescripts. Three values are computed, one with no script ∆1,one before the application of the script ∆2, and one after theapplication of the script ∆3 which is expected to be smallerthan ∆1. Furthermore, the nature of the “split” determinesthe nature of the interactions which is demonstrated in thefollowing scripts:
1) ArgueGraph: This script collects opinions and formspairs of students with opposite opinions.
2) ConceptGrid: Team members acquire complementaryknowledge by reading different papers.
3) WiSim: A team tries to understand the behaviour of asystem by simulation. Team members do simulationswith different inputs and share their results. The aim
was the mutual regulation to address the lack of explicitnegotiation of parameters and the difficulty of interpret-ing the representations of results.
These scripts trigger specific types of interaction and, inparticular, argumentation, explanation and mutual regulation,respectively. The authors have validated the effectiveness ofthe first two scripts. Especially for the first one, a studyon 14 doctoral and postdoctoral fellows at EPFL showedthat conflicts led pairs to produce justifications that were notproposed by any peer in the individual phase.
While micro-scripts provide a holistic approach to “con-structing” collaboration, macro-scripts still need some flexi-bility. In order to apply macro-scripts effectively, integrativescripts are required to focus on empowering the teacher[24]. As the classroom is not a place for fully controlledexperiments, quantitative user studies are necessary to findout how to control and how much to control the classroominteractions.
PAPER 3: HUMAN COMPUTER INTERACTION
Our educational technology should provide an efficient wayfor interactions, like object selection and navigation in a 3Dstructure which are interactions found also in 3D modelling.For example, Fitzmaurice et al. [25] argue that the mouse is anall-purpose weak device that can be advantageously replacedby strong specific devices for specific and limited tasks. Lauet al. [26] present a Head-Mounted Display (HMD) for 3Dmodelling. The ability to use physical objects and the nondominant hand as reference points had a positive effect onaccuracy and speed.
The process of “stamping” is similar to postage stampingbut in the 3D virtual space. The primitive shapes are rectan-gular boards, small cubes and long cylinders that are easy todistinguish and to manipulate with the following interactions:
• “Single stamping” makes a virtual copy of a primitiveshape to the Augmented Reality (AR) scene.
• “Sweep stamping” makes multiple virtual copies that canbe discrete or continuous number of copies, parallel orperpendicular to the direction of the user action wherethe object considers the 3D space as segmented or con-tinuous.
• The “visualization cube” can be rotated and moved inany direction to observe the model from any viewpointor rescale it.
• “Situated modelling” is about adding virtual shapes tophysical shapes by using the latter ones as referencepoints. For example, fitting a virtual shelf into the wallis done by using the wall and the ground as references(Figure 2a).
• “Two-handed stamping” is about using the non dominanthand as a reference to add virtual shapes to existingvirtual shapes (Figure 2b).
The functionality is demonstrated by creating virtual fur-niture like bookcases, tables, chairs and other householdproducts. To evaluate the effect of situated modelling and two-handed stamping, the system is compared with a HMD thatdoes not have these features called Daichi [27]. Daichi is for

EDIC RESEARCH PROPOSAL 5
virtual woodworking (Figure 2c) and it has a different devicefor each interaction, a tactile one for picking and moving anobject, an acoustic one for wood dimensioning and anotheracoustic one for joining parts (Figure 2d viewed from rightto left). A counterbalanced between-subjects experiment of10 participants showed a significant difference in accuracyand speed (p < .004). They were asked to build a virtualbookcase between real bookcases. The bookcases made withDaichi were partially intersecting with the real bookcases andthe floor, which was not the case with the system under test.
One drawback of the system is that it uses a keyboardand foot pedals to complement its functionality. Although theauthors do not specify how the keyboard and the foot pedalsare used, they propose gesture recognition as an alternativeto the missing degrees of freedom. There is no analysisof the system’s technical performance and as regards themethodology of the experiment, three of the subjects hadsome experience in 3D modelling and one had in AugmentedReality. Finally, the statistical results are not well presented asthe t-value is missing.
(a) (b)
(c) (d)
Fig. 2. (a) Situated modelling (b) Two-handed stamping (c) Daichi (d) Daichitools
SUGGESTED ENVIRONMENTS
To study the effectiveness of tangible interfaces for un-derstanding structural mechanics, we follow a Design-BasedResearch (DBR) approach. DBR is the methodology of ap-plying iterations (1 to 3 in our case) of hypothesis formation,evaluation and hypothesis revision. Educational research andHuman Computer Interaction are not domains based on formalquantitative theories and research has been largely based onqualitative observations. Although we do not discard the valueof observations, our decisions are based on quantitative userstudies and controlled experiments. The first hypothesis isalready formed through a user study on 53 third year carpenterapprentices in 4 different classes at one school in the Frenchspeaking part of Switzerland. Our hypothesis is that mantling,stressing and dismantling of structures found in the workplaceis effective for understanding the load transfer mechanism. To
evaluate our hypothesis we plan to design artifacts that inte-grate well with the classroom and the workplace experience,develop them, test them and conduct user studies to analyzetheir learning outcome.
Field study
Our field study is based on the Statics Concept Inventory(SCI) [19] which we adapted and extended for our context incollaboration with teachers. Carpenter apprentices have differ-ent abstraction ability, reading and writing comprehension andability to concentrate than mechanical or civil engineers. Be-fore the test, we gave them a questionnaire which showed thatthe students do not know that an understanding of structuralmechanics is necessary in their job as carpenters yet, eventhough they are in the last year of school. Furthermore, wehave incorporated a Certainty scale for each of the 8 multiplechoice questions, ranging from 1 (“Random guess”) to 6(“Absolute certainty”). The results showed that students couldnot apply theory into practice by moving from simple textbookcalculations to a qualitative understanding. Particularly, thebiggest problem was found when the students were asked tostate intuitively (qualitatively) how the load transfer changeswhen an object is moved (Figure 3).
Fig. 3. Upper: F1 = F2 =Fg
2Bottom: 50% of third year students failed
The students had to choose one of the following answers:
1) F3 = F4 and F3 > F1
2) F3 > F4 and F3 < F1
3) F4 > F3 and F4 > F2 (which is the correct answer)4) F3 = F1 and F4 = F2
Understanding the load transfer mechanism is necessary inthe workplace as a structure can collapse due to wind, snowor even while mantling or dismantling. However, obviouslyit is not safe to learn mantling, stressing and dismantling areal structure by trial-and-error. In the following section wedescribe a pedagogical scenario which can be supported bytwo alternative augmented reality environments, one based ona construction kit and one based on mobile devices.

EDIC RESEARCH PROPOSAL 6
Pedagogical scenario
Simulating the missing workplace experience in the class-room can give students an abstraction of the structure so thatthey can focus on the key concepts and reflect on their actions.The structure should be similar to the ones found in theworkplace in order to link its manipulation with the workplaceexperience which also enables them to discuss their analysiswith their boss. Asking students to record their workplaceactivity or its outcome (a completed structure) can give themthe opportunity to share their workplace experience and toreflect on its relevance with the theory.
The first of our reference papers states that students shouldfocus on identifying which are the bodies and which bodyexerts which force on which body. We suggest augmentedreality environments in which students can apply a forceof varying degree or remove a part and explore how thedeformation in other parts of the structure changes. Addinga force to a part can be done in a construction kit or withtwo-handed stamping, an interaction described at the thirdreference paper and this action can be monitored. A secondstudy can show the effect of grouping the students into pairs(who are working on companies of very different size) asmotivating the students to argue about their proposed action isexpected as mentioned in the 2nd reference paper to increasetheir collaborative effort and encourage them to reflect ontheir workplace experience and share their explanations. Wepropose a technology to support the teacher on following thestudents’ activity by providing a real-time view of students’activity, effort and history of actions. The task is designed tocomplement the teaching with diagrams and not to replaceit. The teacher should be able to deal with the classroomdynamics, for example by disabling students’ activity andreferring to a specific part in order to discuss about a specificconcept.
Task description
The interaction with the structure can be by removing a partor by adding a force that represents the force of wind or snow.The effect of the student’s action can be that the structurecollapses or it can be a change in deformation. Dollar et al.suggest that the internal loads can be understood by referringto the associated deformations [1]. Abstraction helps studentsfocus on the geometry of the structure while ignoring effectsof the environment, the material and the types of joints.
We propose a task where first the students are asked toadd forces and see the effect. Then, the students are askedto add a force at a point in order to achieve a given changein deformation of a specific part. And finally, the studentsare asked to dismantle the structure safely. The students arecompeting in terms of elapsed time, number of cancelledactions and number of times the structure collapsed whiledismantling.
We expect the students to understand the existence offorces between unmoving, relatively rigid, inanimate objectsby showing the change in deformation when a force is appliedlike when a part is removed. The task will be evaluated witha pre-test and a post-test that is composed of multiple choice
questions with simple diagrams examining the load transfermechanism similar to our SCI.
Technology
1) Construction kit: We propose to design, build and testan embedded computing approach based on a construction kitwhere students can apply a force in a construction kit andsee the effect on the whole structure in terms of deformation.LeClerc et al. show the deformation visually on the jointsafter determining and analyzing the global topology [28].Deformation can be measured with a flex sensor (also calledbend sensor) built from cheap conductive materials whoseresistance is proportional to their deformation. Conductivematerials are usually used for detecting deformation verticalto the axis of the material, although we are also interested indetecting compression and tension. As regards the quality ofthe measurements, we are interested in measuring differencesfrom a previous state and not in measuring absolute values. Asthe commercial flex sensors are too elastic to hold the weightof the structure, we can fill straws of a specific plastic materialwith a conductive material. These straws are solid enough tohold the weight of the structure so the deformation is difficultto be seen visually, but it can be measured with a flex sensor.Additionally, as the straws are not very tolerant to deformation,they can collapse, which fits with out pedagogical scenario.The connectors are similar to the K’NEX construction kitwhere two unary joints can provide any angle in the 2D (Figure4b).
(a) (b)
(c) (d)
Fig. 4. (a) K’NEX construction kit (b) K’NEX primitives (c) Conductiveparticles close together (30k Ohms) (d) Conductive particles further apart (50kOhms)
On this scenario, the conductive material is connected witha number of LEDs whose light intensity is proportional to thematerials resistance, thus showing the degree of deformation inthe opposite order. The straws act as passive electronic com-ponents with the connectors including cables and amplifiersbetween pins for transferring power. When dismantling, powertransmission is not halt and a sensor detects the detachedpart. An external device is used to power on the LEDs of
EDIC RESEARCH PROPOSAL 7
the structure. Precise forces are be added with spring scalesas exertion in TUIs has been used to communicate magnitude[29]. A second external device is used to ask the student ifthe load has changed (increased, decreased or if remained thesame), validate his answer and send the result to the teacher’scomputer.
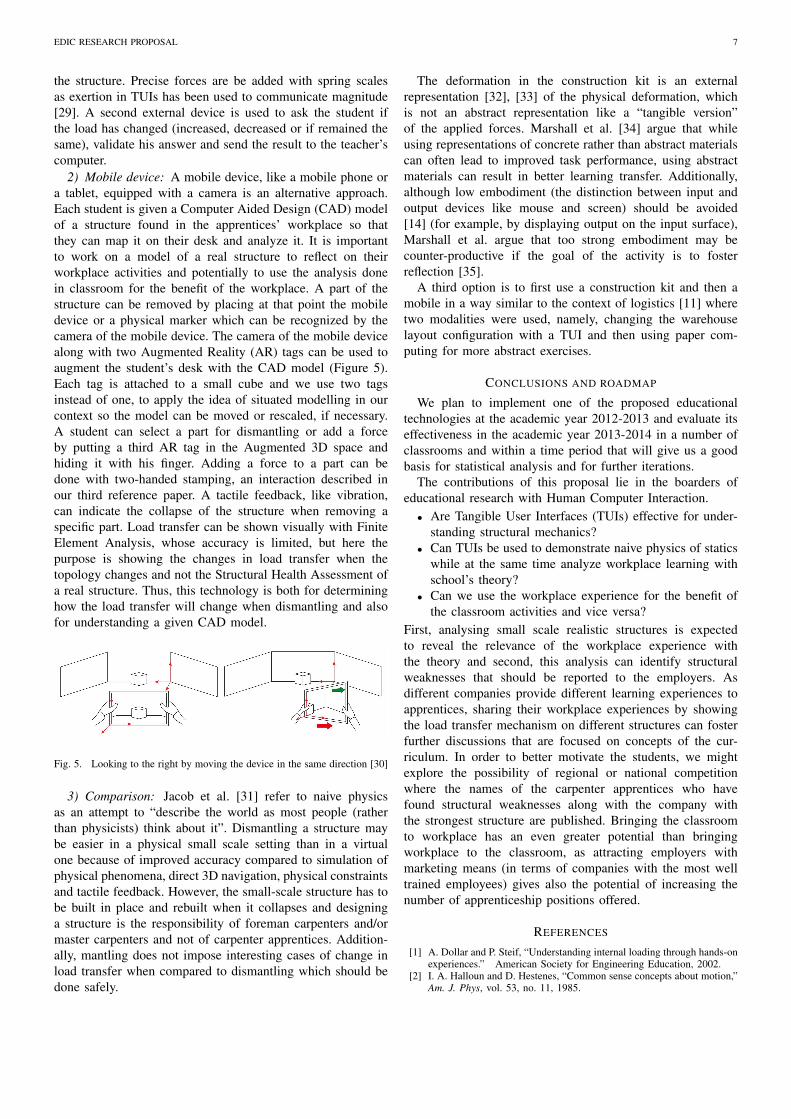
2) Mobile device: A mobile device, like a mobile phone ora tablet, equipped with a camera is an alternative approach.Each student is given a Computer Aided Design (CAD) modelof a structure found in the apprentices’ workplace so thatthey can map it on their desk and analyze it. It is importantto work on a model of a real structure to reflect on theirworkplace activities and potentially to use the analysis donein classroom for the benefit of the workplace. A part of thestructure can be removed by placing at that point the mobiledevice or a physical marker which can be recognized by thecamera of the mobile device. The camera of the mobile devicealong with two Augmented Reality (AR) tags can be used toaugment the student’s desk with the CAD model (Figure 5).Each tag is attached to a small cube and we use two tagsinstead of one, to apply the idea of situated modelling in ourcontext so the model can be moved or rescaled, if necessary.A student can select a part for dismantling or add a forceby putting a third AR tag in the Augmented 3D space andhiding it with his finger. Adding a force to a part can bedone with two-handed stamping, an interaction described inour third reference paper. A tactile feedback, like vibration,can indicate the collapse of the structure when removing aspecific part. Load transfer can be shown visually with FiniteElement Analysis, whose accuracy is limited, but here thepurpose is showing the changes in load transfer when thetopology changes and not the Structural Health Assessment ofa real structure. Thus, this technology is both for determininghow the load transfer will change when dismantling and alsofor understanding a given CAD model.
Fig. 5. Looking to the right by moving the device in the same direction [30]
3) Comparison: Jacob et al. [31] refer to naive physicsas an attempt to “describe the world as most people (ratherthan physicists) think about it”. Dismantling a structure maybe easier in a physical small scale setting than in a virtualone because of improved accuracy compared to simulation ofphysical phenomena, direct 3D navigation, physical constraintsand tactile feedback. However, the small-scale structure has tobe built in place and rebuilt when it collapses and designinga structure is the responsibility of foreman carpenters and/ormaster carpenters and not of carpenter apprentices. Addition-ally, mantling does not impose interesting cases of change inload transfer when compared to dismantling which should bedone safely.
The deformation in the construction kit is an externalrepresentation [32], [33] of the physical deformation, whichis not an abstract representation like a “tangible version”of the applied forces. Marshall et al. [34] argue that whileusing representations of concrete rather than abstract materialscan often lead to improved task performance, using abstractmaterials can result in better learning transfer. Additionally,although low embodiment (the distinction between input andoutput devices like mouse and screen) should be avoided[14] (for example, by displaying output on the input surface),Marshall et al. argue that too strong embodiment may becounter-productive if the goal of the activity is to fosterreflection [35].
A third option is to first use a construction kit and then amobile in a way similar to the context of logistics [11] wheretwo modalities were used, namely, changing the warehouselayout configuration with a TUI and then using paper com-puting for more abstract exercises.
CONCLUSIONS AND ROADMAP
We plan to implement one of the proposed educationaltechnologies at the academic year 2012-2013 and evaluate itseffectiveness in the academic year 2013-2014 in a number ofclassrooms and within a time period that will give us a goodbasis for statistical analysis and for further iterations.
The contributions of this proposal lie in the boarders ofeducational research with Human Computer Interaction.
• Are Tangible User Interfaces (TUIs) effective for under-standing structural mechanics?
• Can TUIs be used to demonstrate naive physics of staticswhile at the same time analyze workplace learning withschool’s theory?
• Can we use the workplace experience for the benefit ofthe classroom activities and vice versa?
First, analysing small scale realistic structures is expectedto reveal the relevance of the workplace experience withthe theory and second, this analysis can identify structuralweaknesses that should be reported to the employers. Asdifferent companies provide different learning experiences toapprentices, sharing their workplace experiences by showingthe load transfer mechanism on different structures can fosterfurther discussions that are focused on concepts of the cur-riculum. In order to better motivate the students, we mightexplore the possibility of regional or national competitionwhere the names of the carpenter apprentices who havefound structural weaknesses along with the company withthe strongest structure are published. Bringing the classroomto workplace has an even greater potential than bringingworkplace to the classroom, as attracting employers withmarketing means (in terms of companies with the most welltrained employees) gives also the potential of increasing thenumber of apprenticeship positions offered.
REFERENCES
[1] A. Dollar and P. Steif, “Understanding internal loading through hands-onexperiences.” American Society for Engineering Education, 2002.
[2] I. A. Halloun and D. Hestenes, “Common sense concepts about motion,”Am. J. Phys, vol. 53, no. 11, 1985.
EDIC RESEARCH PROPOSAL 8
[3] P. Steif and A. Dollar, “Reinventing the teaching of statics,” InternationalJournal of Engineering Education, vol. 21, no. 4, p. 723, 2005.
[4] S. Cuendet, P. Jermann, C. Arn, and P. Dillenbourg, “A study of spatialreasoning skills in carpenters training,” in 2nd International Congresson Research in Vocational Education and Training, Zollikofen, 2011.
[5] FSO, “Vocational education and training in Switzerland - facts andfigures,” 2012.
[6] K. Hoeckel, S. Field, and N. Grubb, “OECD policy review of vocationaleducation and training, Switzerland,” 2009.
[7] FRM-bois, “Plan de formation professionnelle initiale pour charpentireCFC,” 2012.
[8] P. S. Steif and A. Dollar, “Integrating effective general classroomtechniques with domain-specific conceptual needs,” in American Societyfor Engineering Education, 2004.
[9] S. McCrary, R. Gebken, and M. Jones, “Build it and they will learn:Enhancing experiential learning opportunities in the statics classroom.”Annual International Conference of Associated Schools of Construction,2008.
[10] P. S. Steif and E. Gallagher, “Use of simplified FEA to enhancevisualization in mechanics,” 2004.
[11] G. Zufferey, “The complementarity of tangible and paper interfacesin tabletop environments for collaborative learning,” Ph.D. dissertation,2010.
[12] B. Schneider, P. Jermann, G. Zufferey, and P. Dillenbourg, “Benefits ofa tangible interface for collaborative learning and interaction,” LearningTechnologies, IEEE Transactions on, vol. 4, no. 3, pp. 222 –232, Sep.2011.
[13] O. Bergig, N. Hagbi, J. El-Sana, and M. Billinghurst, “In-place 3Dsketching for authoring and augmenting mechanical systems,” in Mixedand Augmented Reality, 2009. ISMAR 2009. 8th IEEE InternationalSymposium on, 2009, p. 8794.
[14] E. Sharlin, B. Watson, Y. Kitamura, F. Kishino, and Y. Itoh, “On tangibleuser interfaces, humans and spatiality,” Personal Ubiquitous Comput.,vol. 8, no. 5, p. 338346, Sep. 2004.
[15] Y. Huang, M. D. Gross, E. Y. L. Do, and M. Eisenberg, “Easigami: A re-configurable folded-sheet TUI,” in Proceedings of the 3rd InternationalConference on Tangible and Embedded Interaction, 2009, p. 107112.
[16] M. Lau, A. Ohgawara, J. Mitani, and T. Igarashi, “Converting 3Dfurniture models to fabricatable parts and connectors,” 2011.
[17] M. P. Weller, E. Y. Do, and M. D. Gross, “Posey: instrumenting aposeable hub and strut construction toy,” in Proceedings of the 2ndinternational conference on Tangible and embedded interaction, 2008,p. 3946.
[18] P. Steif, J. M. Lobue, L. B. Kara, and A. L. Fay, “Improving problemsolving performance by inducing talk about salient problem features,”Journal of Engineering Education, 2010.
[19] P. Steif and J. A. Dantzler, “A statics concept inventory: Developmentand psychometric analysis,” Journal of engineering education, vol. 94,no. 4, p. 363, 2005.
[20] D. Hestenes, M. Wells, and G. Swackhamer, “Force concept inventory,”The physics teacher, vol. 30, no. 3, p. 141158, 1992.
[21] D. C. Berry, “The problem of implicit knowledge,” Expert Systems,vol. 4, no. 3, p. 144151, 1987.
[22] P. Dillenbourg and F. Hong, “The mechanics of CSCL macro scripts,”International Journal of Computer-Supported Collaborative Learning,vol. 3, no. 1, pp. 5–23, 2008.
[23] P. Dillenbourg and P. Tchounikine, “Flexibility in macro-scripts forcomputer-supported collaborative learning,” Journal of Computer As-sisted Learning, vol. 23, no. 1, p. 113, 2007.
[24] P. Dillenbourg, G. Zufferey, H. Alavi, P. Jermann, S. Do-Lenh, Q. Bon-nard, S. Cuendet, and F. Kaplan, “Classroom orchestration: The thirdcircle of usability,” in Proceedings of CSCL, 2011.
[25] G. W. Fitzmaurice and W. Buxton, “An empirical evaluation of gras-pable user interfaces: towards specialized, space-multiplexed input,” inProceedings of the SIGCHI conference on Human factors in computingsystems, 1997, p. 4350.
[26] M. Lau, M. Hirose, A. Ohgawara, J. Mitani, and T. Igarashi, “Situatedmodeling: a shape-stamping interface with tangible primitives,” in Pro-ceedings of the Sixth International Conference on Tangible, Embeddedand Embodied Interaction, 2012, pp. 275–282.
[27] Y. Takami, M. Otsuki, A. Kimura, F. Shibata, and H. Tamura, “Daichi’sartworking: enjoyable painting and handcrafting with new tool devices,”ACM SIGGRAPH ASIA 2009 Art Gallery & Emerging Technologies:Adaptation, p. 6465, 2009.
[28] V. LeClerc, A. Parkes, and H. Ishii, “Senspectra: a computationallyaugmented physical modeling toolkit for sensing and visualization of
structural strain,” in Proceedings of the SIGCHI conference on Humanfactors in computing systems, 2007, p. 801804.
[29] L. Lyons, B. Slattery, P. Jimenez, B. Lopez, and T. Moher, “Don’tforget about the sweat: effortful embodied interaction in support oflearning,” in Proceedings of the Sixth International Conference onTangible, Embedded and Embodied Interaction, ser. TEI ’12. NewYork, NY, USA: ACM, 2012, p. 7784.
[30] W. Hrst and M. Helder, “Mobile 3D graphics and virtual realityinteraction,” in Proceedings of the 8th International Conference onAdvances in Computer Entertainment Technology, ser. ACE ’11. NewYork, NY, USA: ACM, 2011, p. 28:128:8.
[31] R. J. Jacob, A. Girouard, L. M. Hirshfield, M. S. Horn, O. Shaer, E. T.Solovey, and J. Zigelbaum, “Reality-based interaction: a frameworkfor post-WIMP interfaces,” in Proceedings of the twenty-sixth annualSIGCHI conference on Human factors in computing systems, 2008, p.201210.
[32] S. Ainsworth, “DeFT: a conceptual framework for considering learningwith multiple representations,” Learning and Instruction, vol. 16, no. 3,p. 183198, 2006.
[33] P. C. H. Cheng, “Unlocking conceptual learning in mathematics and sci-ence with effective representational systems,” Computers & Education,vol. 33, no. 2-3, p. 109130, 1999.
[34] P. Marshall, “Do tangible interfaces enhance learning?” in Proceedingsof the 1st International conference on Tangible and embedded interac-tion, 2007.
[35] P. Marshall, S. Price, and Y. Rogers, “Conceptualising tangibles tosupport learning,” in Proceedings of the 2003 conference on Interactiondesign and children, 2003, p. 101109.