efficient hybrid algorithms for plan recognition and detection of suspicious and anomalous behavior...
TRANSCRIPT

Efficient Hybrid Algorithms for Plan
Recognition and Detection of Suspicious
and Anomalous Behavior
Dorit Avrahami-Zilberbrand Gal A. Kaminka
The MAVERICK GroupComputer Science Department
Bar Ilan University, [email protected]
Plan Recognition: Motivation
Inferring the intentions, plans, goals of an agent Based on observations of its interactions with environment
Recognizing the internal state of an agent NLP, intrusion detection systems, surveillance
Challenges Multi featured observations Lossy observations, duration constrains, interleaved plans
Goal: Efficient Algorithms for Plan Recognition Dealing with plan recognition challenges Incorporating observer biases and preferences Maintaining efficient plan recognition

Efficient Hybrid Model for Plan Recognition
SBR: Fast and Complete Symbolic Plan Recognition
Efficient matching of Complex multi-features observations Handling lossy observations, Interleaved goals, duration
constraints Avoiding computation of hypotheses
UPR: Utility based Plan Recognition Choosing hypotheses based on utility to the observer Low likelihood hypotheses with costs are not ignored
Highly Efficient Symbolic recognizer efficiently filters hypotheses Utility based recognizer ranks only small number of hypotheses

Detecting Anomalous and Suspicious Behavior
Utilize plan recognition to detect suspicious behavior Negative behavior plan library Positive behavior plan library
Utilize symbolic algorithms for abnormal activity Walking in wrong direction Long time to pass security check
Detect activities with danger to the observer Leaving articles unattended

Related work Symbolic reactive plan recognition
RESC (Tambe et al 1995) RESL (Kaminka et al 2000)
Probabilistic approaches Bayesian network (Huber et al 1994) Grammar representation (Pynadath et al 2000) Hidden Markov models (Han et al 1999, Bui 2003)
Hybrid approach Probabilistic plan recognition (Geib,Goldman 2001)

Related work - cont Most plan recognition researches ignore utilities Reasoning about the utility for the observed agent
Mao et al.,2004, Suzic 2005 Reasoning about the utility for the observer
RESC (Tambe et al.,1995) - takes a heuristic approach Using influence diagrams is inhibitory for real time
Howard et al.,1984 Our Approach:
Choosing hypotheses based on utility to the observer Highly efficient Not heuristic

Background: Hierarchical Plan Library
Directed acyclic connected graph
Vertices denote plan steps Edges
Vertical (decomposition) edges Horizontal (sequential) edges
Self cycles – durations Each plan step contains
conditions Plan path - root to leaf path
security
position X-Ray coffee

The Symbolic Recognizer(Avrahami-Zilberbrand and Kaminka IJCAI,MOO
2005)
Input: vector of observed features Efficiently matches observations to plan steps
Feature Decision Tree (FDT) Tagging and propagating
Tags with observation time-stamp and propagates Output: paths tagged with time-stamp t Advantages
Handles key capabilities in plan recognition Efficient – linear time in the plan library size

Feature Decision Tree - FDT
Nodes correspond to observation features Branches represents possible values of feature Leaf points to the matching plan steps
attack
pass position pass
Have ball ?
Opp-Goal Visible?
destination from players
yes
no
yesno
farnear
kick
Pass
very far
Uniform-number
321
Position
Plan Librar
yFDT
score
kick
root
Pass
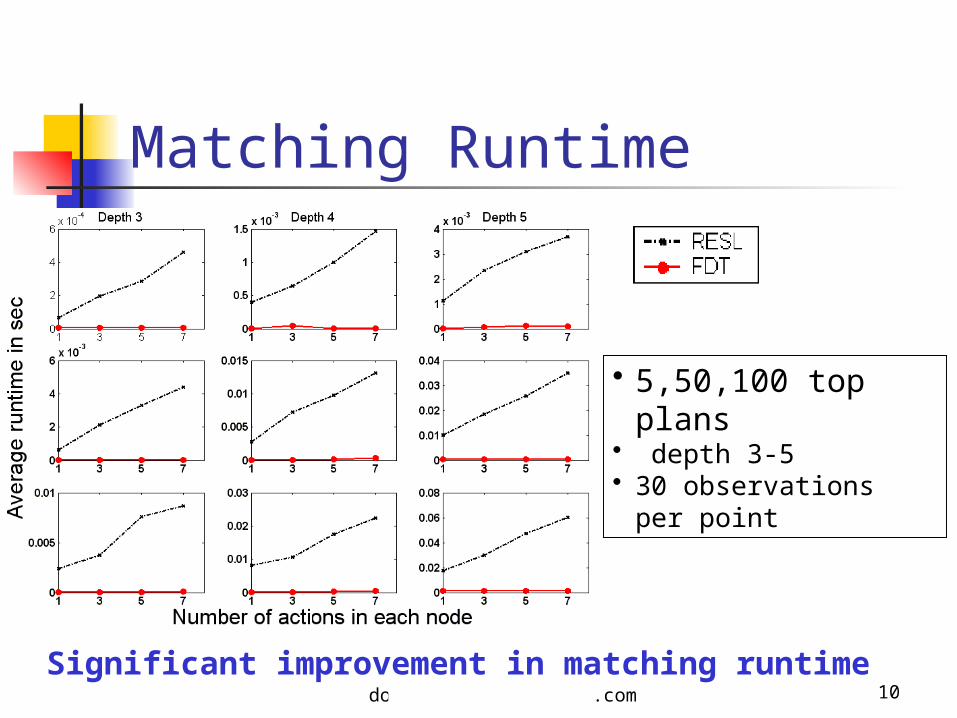
Matching Runtime
• 5,50,100 top plans• depth 3-5• 30 observations per
point
Significant improvement in matching runtime

Symbolic Recognizer - Example
root
securityentrance board
position
coffee
X-Ray
Shop
position
without bag
position X-Ray
position coffee gate
with bag
without bag
with bag
1
1
1
1
22
22
1 1
1
2
2
22
2
coffee
security
positionposition
position
position
without bag
with bag
without bag
withbag
1

UPR: Utility Based Plan Recognizer:
Compute expected utility to the observer for each hypothesis Build on Hierarchical HMM representation (Fine et al,. 1998)
Add an end state for each level Add edges from each plan step to the end state
Add utility information on the edges (utilities are shown in diamonds)
Use UPR algorithm to rank symbolic algorithm resultsentrance
position X-rayEnd
0.5
0.2
0.8
0.2
coffee
0.8
0.50.2
10

Plan Library - exampleroot
walk with article
1
Endstop put
pick
0.8
0.1
0.4
0.1
0.1
0.2
0.1
0.7
0.1
0.1
0.8
-10101
32
start 1 0.3
0.110
The transition allowing an agent to leave a suitcase has large cost

UPR Naive algorithm Formally
Let Wk= w1 … wn be one of the previous hypotheses Let Xi= x1 … xn be one of the current hypotheses The most probable hypothesis is:
Multiply the probability and utility for each current hypothesis Traverse the library from previous path to current path Multiply appropriate probabilities and utilities Return the most costly hypothesis
Naive algorithm O(N2T) (N: plan library size, T:number of observations)
Complexity O(NTD) (D: depth of the plan library ~ logN)
kiiw
kikik
X
i
X
i WXUWXPWPnsobservatioXUX )|()|()()|(ˆ maxargmaxarg

Detecting Anomalous and Suspicious Behavior System
SBR
UPR
Set Of Hypotheses
Observations sequence
Anomalous Behavior
Suspicious Behavior
Plan Library
Empty?
High Cost?
Yes
No
Set Of Hypotheses
Yes
No

Detecting Anomalous Behavior
Utilizing SBR Non matching activities marked as
abnormal Learning the plan library
Simple learning algorithm Experiments
Video clips from Caviar Projects AVNET data
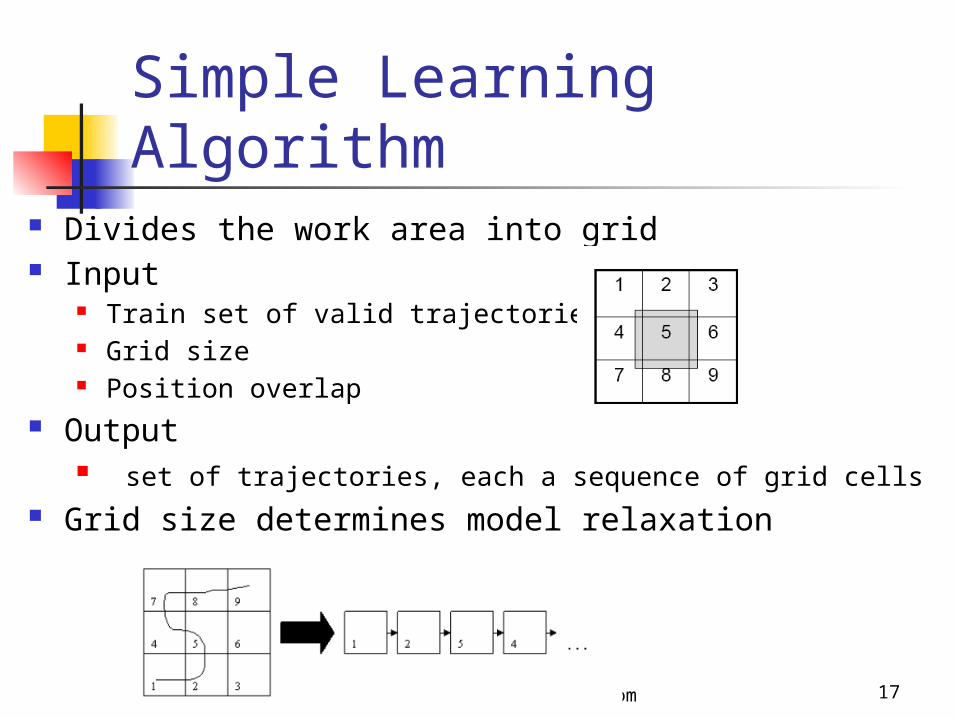
Simple Learning Algorithm Divides the work area into grid Input
Train set of valid trajectories Grid size Position overlap
Output set of trajectories, each a sequence of grid cells
Grid size determines model relaxation

CAVIAR Data Contains number of video clips with different
scenarios Used this data to simulate real tracker
Add noise with normal distribution

CAVIAR Data Precision - Number of elements correctly labeled as anomalous,
divided by total number of elements labeled as anomalous. Recall - Number of elements correctly labeled as anomalous,
divided by total number of elements are actually anomalous.


AVNET Data
Standing for long time
Start
Turn point
False positives rate 2.37% (non-suspects that classified as suspects)

Detecting Suspicious Behavior
Three different recognition tasks Leaving Unattended articles Catching a dangerous driver Air Combat environment


Catching A Dangerous Driver
Confusion error rates for different thresholds for dangerous and safe driver

Air Combat environment RESC (Tambe & Rosenbloom 1995)
Used an example of agents in a simulated air-combat environment
Heuristically prefers a single worst-case hypothesis Regardless to the hypothesis likelihood
UPR (our approach) Incorporates the biases of an observing pilot much more
cleanly Takes likelihood of hypotheses when computing expected
cost Can ignore improbable (but still possible) worst-case
hypotheses Allows also modeling optimistic observers

Summary and Future work
Hybrid Plan Recognition Symbolic recognizer efficiently filters hypotheses Incorporating observer biases and preferences Complexity O(TN2) O(TND) Utility based engine ranks only small number of
hypotheses Detecting anomalous and suspicious behavior Future work
Dealing with more challenges e.g., Multi Agents
Testing on more applications e.g., cyber-security [email protected]
om

UPR : Probabilities State transition probability matrix
The probability of horizontal transition from i to j plan step Self cycle edges also represented by this matrix
Interrupt probability represented by edge to end state
Vertical transition probability matrix The probability of executing one of the first children
entrance
position X-rayEnd
0.5
0.2
0.8
0.2
coffee
0.8
0.50.2
)2.0:,8.0:(, endxRaya positionji
)5.0:,5.0:(, positioncoffeeentranceji

UPR : Utilities As in the probabilistic reasoning we have 3 kinds of
utilities: State transition utility matrix
The utility of horizontal transition from i to j plan step Interrupt utility represented by edge to end state Vertical transition utility matrix
The utility of executing one of the first childrenentrance
position X-rayEnd
0.5
0.2
0.8
0.2
coffee
0.8
0.50.2
)10:,0:(, endxRayE positionji
)0:,3:(, positioncoffeeentranceji
3
10

UPR Naïve Algorithm Complexity
Naive algorithm Traverse the plan library from previous leaf to
current leaf Multiply probabilities on edges Select the most costly hypothesis
Complexity O(N2T) N is the plan library size T is the number of observations
Can we do better ?

Efficient Algorithm for UPR Propagate probabilities and utilities up and down in
plan library Choose random leaf tagged with t-1 Propagate up Expected utility of plans tagged with t-1 Propagate down Expected utility to leaves tagged with t
For example: Naive: CB*BA*AE*EG+DB*BA*AE*EG Efficient UPR: (CB+DB)*BA*AE*EG
A
B
C D
E
F G
tt-1 t-1
complexity O(NTD)
D~LogN