electric slide table les series - smc
TRANSCRIPT

PRODUCT NAME
Electric Slide Table
MODEL / Series / Product Number
LES Series Applicable models: LES[]R,LES[]L,LES[]D,LESH[]R,LESH[]L,LESH[]D
This manual describes the actuators operation in combination with the LEC*6 series controllers. Refer to the manual relevant to the controller being used for full operating instructions.
Doc. no. LES-OM00214
<Controller> LEC Series
L Type ●Standard
/LES[]L Series
R Type ●Standard
/LES[]R Series
D Type ●Standard /LES[]D Series

- 1 –
Contents Safety Instructions ............................................................................. 2
1. Procedure before operation/simple setting to use straight away4
1.1 Preparation ................................................................................ 4
1.2 Controller setting software version ......................................... 5
1.3 Teaching box ............................................................................. 7
2. Electric Slide table /LES Series ..................................................... 9
2.1 Specification .............................................................................. 9
2. 2 How to Order .......................................................................... 13
2.3 Construction............................................................................ 14
3. Product Outline ............................................................................ 18 3.1 System construction .............................................................. 18
3.2 Setting Function ...................................................................... 19
3.3 Step data setting ..................................................................... 22
3.4 Parameter setting .................................................................... 33
4. Wiring of cables / Common precautions .................................... 37
5. Electric actuators / Common precautions ................................. 38
5.1 Design and selection .............................................................. 38
5.2 Mounting .................................................................................. 39
5.3 Handling .................................................................................. 40
5.4 Operating environment .......................................................... 41
5.5 Maintenance ............................................................................ 41
5.6 Precautions for actuator with lock ........................................ 42
6. Electric actuators / Common precautions ................................. 43
6.1 Design and selection .............................................................. 43
6.2 Handling .................................................................................. 43
6.3 Precaution on maintenance ................................................... 48
6.4 Replacement of belt ( LES**R / LES**L ) ............................... 49
6.5 How to spreading grease ....................................................... 51
7. Troubleshooting ........................................................................... 52

- 2 -
LES Series / Electric Slide table Safety Instructions
These safety instructions are intended to prevent hazardous situations and /or equipment damage. These instructions indicate the level of potential hazard with the labels of “Caution,” “Warning” or “Danger.” They are all important notes for safety and must be followed in addition to International Standards (ISO /IEC), Japan Industrial Standards (JIS)*1) and other safety regulations*2). *1) ISO 4414: Pneumatic fluid power -- General rules relating to systems ISO 4413: Hydraulic fluid power -- General rules relating to systems IEC 60204-1: Safety of machinery -- Electrical equipment of machines (Part 1: General requirements) ISO 10218-1992: Manipulating industrial robots -- Safety JIS B 8370: General rules for pneumatic equipment. JIS B 8361: General rules for hydraulic equipment. JIS B 9960-1: Safety of machinery – Electrical equipment for machines. (Part 1: General requirements) JIS B 8433-1993: Manipulating industrial robots - Safety. etc. *2) Labor Safety and Sanitation Law, etc. Caution Caution indicates a hazard with a low level of risk which, if not avoided, could result in minor or
moderate injury. Warning Warning indicates a hazard with a medium level of risk which, if not avoided, could result in
death or serious injury. Danger Danger indicates a hazard with a high level of risk which, if not avoided, will result in death or
serious injury.
Warning 1. The compatibility of the product is the responsibility of the person who designs the equipment or
decides its specifications. Since the product specified here is used under various operating conditions, its compatibility with specific equipment must be decided by the person who designs the equipment or decides its specifications based on necessary analysis and test results. The expected performance and safety assurance of the equipment will be the responsibility of the person who has determined its compatibility with the product. This person should also continuously review all specifications of the product referring to its latest catalog information, with a view to giving due consideration to any possibility of equipment failure when configuring the equipment.
2. Only personnel with appropriate training should operate machinery and equipment. The product specified here may become unsafe if handled incorrectly. The assembly, operation and maintenance of machines or equipment including our products must be performed by an operator who is appropriately trained and experienced.
3. Do not service or attempt to remove product and machinery /equipment until safety is confirmed. The inspection and maintenance of machinery /equipment should only be performed after measures to prevent falling or runaway of the driven objects have been confirmed. When the product is to be removed, confirm that the safety measures as mentioned above are implemented and the power from any appropriate source is cut, and read and understand the specific product precautions of all relevant products carefully. Before machinery /equipment is restarted, take measures to prevent unexpected operation and malfunction.
4. Contact SMC beforehand and take special consideration of safety measures if the product is to be used in any of the following conditions. 1) Conditions and environments outside of the given specifications, or use outdoors or in a place exposed to direct sunlight. 2) Installation on equipment in conjunction with atomic energy, railways, air navigation, space, shipping, vehicles, military, medical treatment, combustion and recreation, or equipment in contact with food and beverages, emergency stop circuits, clutch and brake circuits in press applications, safety equipment or other applications unsuitable for the standard specifications described in the product catalog. 3) An application which could have negative effects on people, property, or animals requiring special safety analysis. 4) Use in an interlock circuit, which requires the provision of double interlock for possible failure by using a mechanical protective function, and periodical checks to confirm proper operation.

- 3 -
LES Series / Electric Slide table Safety Instructions
Caution The product is provided for use in manufacturing industries. The product herein described is basically provided for peaceful use in manufacturing industries. If considering using the product in other industries, consult SMC beforehand and exchange specifications or a contract if necessary. If anything is unclear, contact your nearest sales branch. Limited warranty and Disclaimer /Compliance Requirements The product used is subject to the following “Limited warranty and Disclaimer” and “Compliance Requirements”. Read and accept them before using the product. Limited warranty and Disclaimer The warranty period of the product is 1 year in service or 1.5 years after the product is delivered.*3) Also, the product may have specified durability, running distance or replacement parts. Please consult your nearest sales branch. For any failure or damage reported within the warranty period which is clearly our responsibility, a replacement product or necessary parts will be provided. This limited warranty applies only to our product independently, and not to any other damage incurred due to the failure of the product. Prior to using SMC products, please read and understand the warranty terms and disclaimers noted in the specified catalog for the particular products. *3) Vacuum pads are excluded from this 1 year warranty.
A vacuum pad is a consumable part, so it is warranted for a year after it is delivered. Also, even within the warranty period, the wear of a product due to the use of the vacuum pad or failure due to the deterioration of rubber material are not covered by the limited warranty.
Compliance Requirements When the product is exported, strictly follow the laws required by the Ministry of Economy, Trade and Industry (Foreign Exchange and Foreign Trade Control Law).
- 4 -
(3)Power supply plug
●Communication cable
PC (7)Controller
Setting kit
(2) Controller
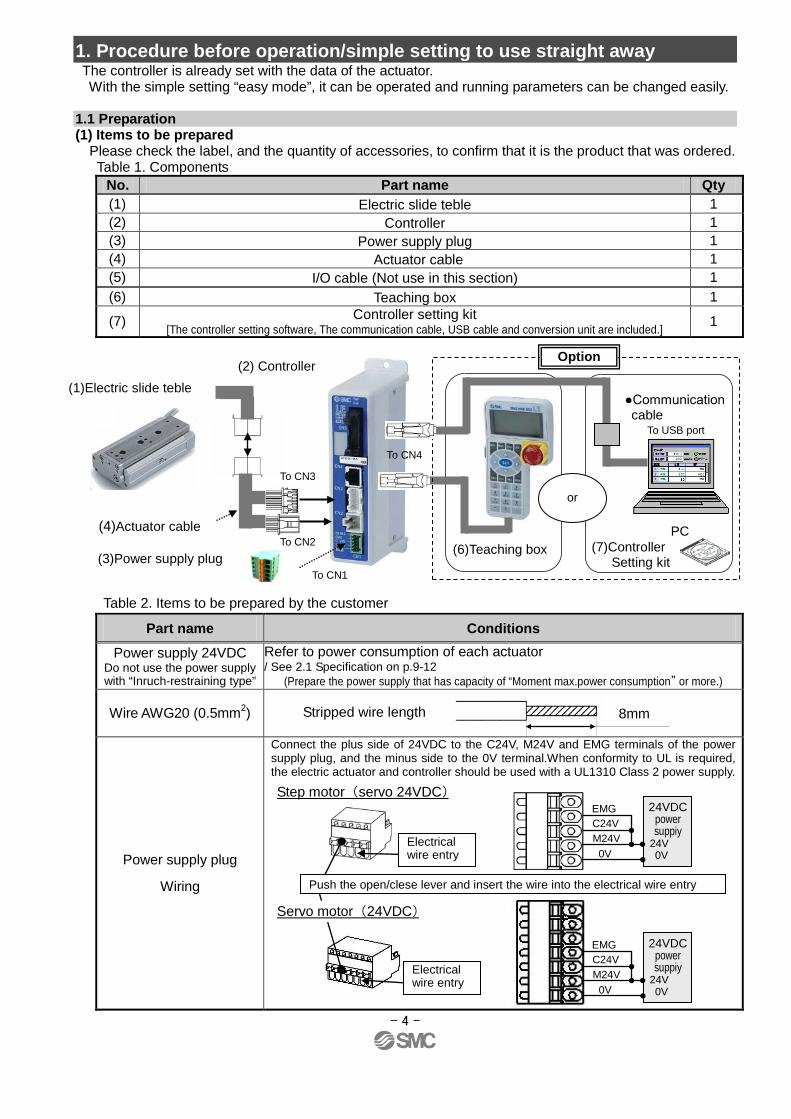
1. Procedure before operation/simple setting to use straight away The controller is already set with the data of the actuator. With the simple setting “easy mode”, it can be operated and running parameters can be changed easily. 1.1 Preparation (1) Items to be prepared
Please check the label, and the quantity of accessories, to confirm that it is the product that was ordered. Table 1. Components
Table 2. Items to be prepared by the customer
No. Part name Qty (1) Electric slide teble 1 (2) Controller 1 (3) Power supply plug 1 (4) Actuator cable 1 (5) I/O cable (Not use in this section) 1 (6) Teaching box 1
(7) Controller setting kit [The controller setting software, The communication cable, USB cable and conversion unit are included.] 1
Part name Conditions Power supply 24VDC
Do not use the power supply with “Inruch-restraining type”
Refer to power consumption of each actuator / See 2.1 Specification on p.9-12
(Prepare the power supply that has capacity of “Moment max.power consumption” or more.)
Wire AWG20 (0.5mm2)
Power supply plug
Wiring
Connect the plus side of 24VDC to the C24V, M24V and EMG terminals of the power supply plug, and the minus side to the 0V terminal.When conformity to UL is required, the electric actuator and controller should be used with a UL1310 Class 2 power supply.
(1)Electric slide teble
To CN3
(4)Actuator cable (6)Teaching box
or
To USB port
Option
To CN2
To CN1
To CN4
Electrical wire entry
Step motor (servo 24VDC)
Servo motor (24VDC)
Push the open/clese lever and insert the wire into the electrical wire entry
EMG 24VDC power suppiy
24V 0V 0V
M24V C24V
Electrical wire entry
EMG 24VDC power suppiy
24V 0V 0V
M24V C24V
Stripped wire length
8mm

- 5 -
1.2 Controller setting software version 1. Installation of software With the controller setting software CD-ROM, install the communication unit software, following the
“Software Installation procedure” (PDF) 2. Startup of software After turning on the controller power supply, start up the ACT Controller setting soft ware.
Select “Easy Mode” Select “OK”
3. JOG Drive a. Driving preparation: Servo On → Return to ORIG
Select “Monitor” Select “OK” (1)”SVRE” lighting is confirmed b.JOG Drive (2) Select “Return to ORIG”
Cli
Clicking arrow button→Operation
c. Driving stop: Servo Off
Select “Test” Select “OK”
Caution If an alarm is generated (1) When ”ALARM” is generated, release it by selecting (2) Reset.
In the case of an alarm code that cannot be released with “Reset”, turn the power supply OFF and ON again.
Note) For details of alarm codes, refer to the Controller Operation Manual.
(1)
(1)
(2)
(2)
Extended Retracted
Retracted Extended
- 6 -
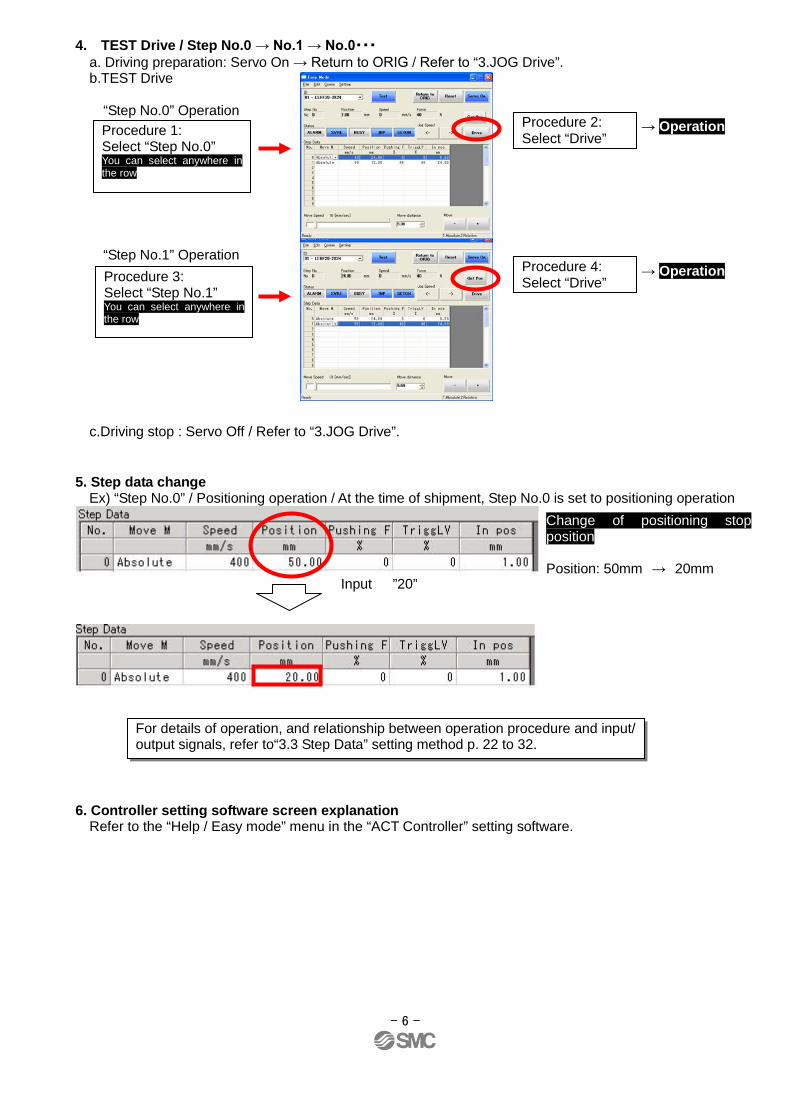
4. TEST Drive / Step No.0 → No.1 → No.0・・・ a. Driving preparation: Servo On → Return to ORIG / Refer to “3.JOG Drive”. b.TEST Drive
“Step No.0” Operation
→ Operation
“Step No.1” Operation → Operation
c.Driving stop : Servo Off / Refer to “3.JOG Drive”. 5. Step data change Ex) “Step No.0” / Positioning operation / At the time of shipment, Step No.0 is set to positioning operation
Input ”20”
6. Controller setting software screen explanation
Refer to the “Help / Easy mode” menu in the “ACT Controller” setting software.
Procedure 1: Select “Step No.0” You can select anywhere in the row
Procedure 2: Select “Drive”
Procedure 3: Select “Step No.1” You can select anywhere in the row
Procedure 4: Select “Drive”
For details of operation, and relationship between operation procedure and input/ output signals, refer to“3.3 Step Data” setting method p. 22 to 32.
Change of positioning stop position Position: 50mm → 20mm

- 7 -
1.3 Teaching box 1. Name 2. JOG Drive
Select “JOG” Method of ending “JOG Drive”
Press the (3)SET key 3. TEST Drive / Step No.0 → No.1 → No.0・・・
Select “TEST”
Press the (3)SET key
Method of ending “TEST Drive” It is the same as the Method
of ending “JOG Drive”
(1) Number key
(4) Up and down, right and left key
(3)SET key
(2) JOG key
(5)MENU key
アラーム ALARM
ジョグ JOG
設定 SETTING
テスト TEST
モニタ MONITOR
データ DATA
アラーム ALARM
ジョグ JOG
設定 SETTING
テスト TEST
モニタ MONITOR
データ DATA
The
pow
er s
uppl
y is
turn
ed o
n.
EXT Inp OFF:YES Press the (3)SET key
↓ Servo ON,Ready?:YES Press the (3)SET key
↓ RTN ORIG:Start
Press the (3)SET key ↓
JOG 1 RTN ORIG Done “JOG±”:Move Posn 123.45mm
Operates by (2) JOG key JOG+: extract JOG-: retract
Press the (5)MENU key ↓
Check 1 EXT Inp ON
OK Press the (3)SET key
<Work 1: Driving> Press the (4)Down key
Test 1 Step No. 0 Test Start Posn 10.00mm Press the (3)SET key
↓ Step No.0(Open) Test Complete
↓ <Work 2
:Select Step No.> Press the (4)Up key
Test 1 Step No. 1 Test Start Posn 50.00mm Press the (1)Number key”1” Press the (3)SET key
↓ <Work 1: Driving>Repetition
AX IS.
AX IS.
The
pow
er s
uppl
y is
turn
ed o
n.
アラーム ALARM
ジョグ JOG
設定 SETTING
テスト TEST
モニタ MONITOR
データ DATA
アラーム ALARM
ジョグ JOG
設定 SETTING
テスト TEST
モニタ MONITOR
データ DATA
EXT Inp OFF:YES Press the (3)SET key
↓ Servo ON,Ready?:YES Press the (3)SET key
↓ RTN ORIG:Start
Press the (3)SET key ↓
Test 1 Step No. 0 Test Start Posn 10.00mm

- 8 -
4. Step data change “Step No.0” / Positioning operation
Select “DATA” Press the (3)SET key
Method of ending “DATA” Press the (5)MENU key
5. Teaching box detailed explanation
Please refer to the teaching box manual.
The
pow
er s
uppl
y is
turn
ed o
n.
アラーム ALARM
ジョグ JOG
設定 SETTING
テスト TEST
モニタ MONITOR
データ DATA
Screen to stop at 50mm position
Step 1 Step No. 0 Posn 50 .00mm Force 0% Press the (4)Down key
Select “Posn”
Change of positioning stop position
Posn 50 mm → 20mm Step 1 Step No. 0 Posn 50 .00mm Force 0% Press the (1)Number key”20” Press the (3)SET key
“Complete” Step 1 Step No. 0 Posn 20 .00mm Force 0%
For details of operation, and relationship between operation procedure and input/ output signals, refer to“3.3 Step Data” setting method p. 22 to 32.

- 9 -
2. Electric Slide table /LES Series 2.1 Specification LES / Step Motor (Servo 24VDC)
0.5 0.25 3 1.5 5 2.5
6 to 15 4 to 10 23.5 to 55 15 to 35 77 to 180 43 to 10010 to 200 20 to 400 10 to 200 20 to 400 10 to 200 20 to 40010 to 20 20 10 to 20 20 10 to 20 20
4 8 5 10 8 16
Holding force [N] 24 2.5 300 48 500 77
Act
uato
r spe
cific
atio
n
100st : 3.48/3.33
125st : 3.71/3.53
Operating humidity range [%RH] 90 or less (No condensation)
Weight[kg]
30st : 0.91/0.77
150st : 3.95/3.74
Pushing speed [mm/s]
14.1
Lock
uni
t spe
cific
atio
n
Type
Not
e9)
No excitation operating type
3.5 2.9 5Rated voltage [VDC] 24+/-10%Power consumption [W] Note10)
Moment max. powerconsumption[W] Note8) 35 69
42Motor type HB type 2-phase step motor (Unipolar connection)Encoder Incremental A/B phase (800 pulse/rotation)
45
Standby power consumption whenoperating [W] Note7) 7 15 13
Ele
ctric
spe
cific
atio
n
Motor size [mm] 20 28
Rated voltage [VDC] 24+/-10%Power consumption [W] Note6) 18 69
67
Operating temp. range [℃] 5 to 40
Static AllowableMoment[Nm]
Pitching
Rolling 0.8
Yawing 2 4.8 14.1
75st : 2.68/2.61
150st : 3.68/3.47
Actuation type Slide screw + belt (R/L type) , Slide screw (D type)
With lockRL type / D
type
30st : -/0.47 30st : -/0.90
50st : -/1.03
2
Guide type
1 3
30st : -/2.08
50st : 2.34/2.31
Linear guide (circulating type)
50 / 20
5,000 or lessPositioning repeatability [mm] +/-0.05
Impact / vibration resistance [m/sec2] Note5)
HorizontalVertical
Acceleration/Deceleration [mm/s2]
LES16□ LES25□
Speed [mm/s] Note1)3)
Work load[kg] Note1)3)
Size LES8□
30 , 50 , 75 , 100 , 125 , 150Stroke [mm] 30 , 50 , 75
Pushing force [N] 30to70% Note2)3)
30 , 50 , 75 , 100
4.8
100st : 3.21/3.07
125st : 3.44/3.27
30st : 1.81/1.82
50st : 2.07/2.0550st : 1.00/0.90 75st : 2.41/2.35
1.8 4.8
Lost motion [mm] Note4) 0.3 or less
5
Without lockRL type / D
type
30st : 0.45/0.40
50st : 0.54/0.5275st : 1.16/1.11
75st : 0.59/0.58 100st : 1.24/1.20
Screw lead [mm]
50st : -/0.5975st : 1.29/1.25
75st : 0.66/0.65 100st : 1.37/1.33
Note 1) The speed is dependent on the workload. Check the “Speed-workload graphs” for the selected model in the catalogue
or the operation manual. Note 2) The accuracy of the pushing force is ±20% of the max. pushing force.
The max. setting for the pushing force is 70% of the max. pushing force. Note 3) The speed and force may change depending on the cable length, load and mounting conditions.
Furthemore, if the cable length exceeds 5m then it will decrease by up to 10% for each 5m.(At 15m : Reduced by up to 20%)
Note 4) A reference value for correcting an error in reciprocal operation. Note 5) Impact resistance:
No malfunction occurred when the actuator was tested with a drop tester in both an axial direction and a perpendicular direction to the lead screw. (The test was performed with the actuator in the initial state) Vibration resistance: No malfunction occurred in a test ranging between 45 to 2000 Hz when the actuator was tested in both an axial direction and a perpendicular direction to the lead screw. (The test was performed with the actuator in the initial state)
Note 6) The "Power consumption" (including the controller) is for when the actuator is operating. Note 7) The "Standby power consumption when operating" (including the controller) is for when the actuator is stopped in the
set position with no applied force in the direction of the actuator movement. Note 8) The "Momentary max. power consumption" (including the controller) is for when the actuator is operating.
This value can be used for the selection of the power supply. Note 9) Only applies to actuators supplied with a lock. Note 10) For the actuator with lock, please add the power consumption for the lock.

- 10 -
LES / Servo Motor(24VDC)
1 0.5 3 1.5 4 2
7.5 to 11 5 to 7.5 17.5 to 35 10 to 20 31 to 62 19 to 38
1 to 200 1 to 400 1 to 200 1 to 400 1 to 200 1 to 400
4 8 5 10 8 16
Type
24 2.5 300 48 500 77
1 to 20
100st : 1.24/1.20
30st : -/0.47 30st : -/0.90
50st : -/1.0350st : -/0.59
75st : 1.29/1.25
75st : 0.66/0.65 100st : 1.37/1.33
30st : -/-
50st : 2.34/-
75st : 2.68/-
5
150st : 3.68/-
100st : 3.21/-
125st : 3.44/-
Slide screw + belt (R/L type) , Slide screw (D type)
75st : 1.16/1.11
75st : 0.59/0.58
4.8
1
5 to 40Operating humidity range [%RH] 90 or less (No condensation)
HorizontalVertical
3
Impact / vibration resistance [m/sec2] Note4) 50 / 20
Lost motion [mm] Note3)
30st : 0.45/0.40
50st : 0.54/0.52
2
Actuation type
0.3 or less
LES16□A
Rolling
Speed [mm/s]
Act
uato
r spe
cific
atio
n
Pushing force [N] 50to100%(LESH8[ ]A:50 to 75%) Note2)
Pushing speed [mm/s]
Screw lead [mm]
Operating temp. range [℃]
Without lockRL type / D
type
With lockRL type / D
type
LESH25 A
Positioning repeatability [mm] +/-0.05
30 , 50 , 75 , 100 , 125 , 150
Work load[kg]
30 , 50 , 75 , 100Stroke [mm] 30 , 50 , 75
Size LES8□A
125st : 3.71/-
150st : 3.95/-
Power consumption [W] Note5)
50st : 1.00/0.90 75st : 2.41/-
100st : 3.48/-
20 28
Encoder Incremental A/B phase (800 pulse/rotation) / Z phaseRated voltage [VDC]
Standby power consumptionwhen operating [W] Note6)
42
Ele
ctric
spe
cific
atio
n
Motor size [mm]
Motor typeMotor output [W] 10 30 36
Servo motor (Servo 24VDC)
71 102
42 68
Horizontal : 8Vertical : 19
111
97
Horizontal : 9 Vertical : 23
Horizontal : 16 Vertical :32
Lock
uni
t spe
cific
atio
n
Not
e8)
No excitation operating type
24+/-10%3.5
Rated voltage [VDC]Power consumption [W] Note9) 2.9 5
Holding force [N]
24+/-10%
Moment max. powerconsumption [W] Note7)
Acceleration/Deceleration [mm/s2] 5,000 or less
30st : 0.91/0.77
Guide type Linear guide (circulating type)
Weight[kg]
30st : 1.81/-
50st : 2.07/-
Static AllowableMoment[Nm]
Pitching
1.8 4.8
14.1
Yawing 2 4.8 14.1
0.8
RL
Note 1) LES25DA is not available. Note 2) The accuracy of the pushing force is ±20% of the max. pushing force. The setting for the pushing force is 50-75% of LESH8[]A pushing force. Note 3) A reference value for correcting an error in reciprocal operation. Note 4) Impact resistance: No malfunction occurred when the actuator was tested with a drop tester in both an
axial direction and a perpendicular direction to the lead screw. (The test was performed with the actuator in the initial state) Vibration resistance: No malfunction occurred in a test ranging between 45 to 2000 Hz. Test was performed in both an axial direction and a perpendicular direction to the lead screw. (The test was performed with the slide table in the initial state.)
Note 5) The "Power consumption" (including the controller) is for when the actuator is operating. Note 6) The "Standby power consumption when operating" (including the controller) is for when the actuator is
stopped in the set position with no applied force in the direction of the actuator movement. Note 7) The "Momentary max. power consumption" (including the controller) is for when the actuator is operating.
This value can be used for the selection of the power supply. Note 8) Only applies to actuators supplied with a lock. Note 9) For the actuator with lock, please add the power consumption for the lock.

- 11 -
LESH / Step Motor (Servo 24VDC)
2 1 8 5 12 8
0.5 0.25 2 1 4 26 to 15 4 to 10 23.5 to 55 15 to 35 77 to 180 43 to 100
10 to 200 20 to 400 10 to 200 20 to 400 10 to 150 20 to 40010 to 20 20 10 to 20 20 10 to 20 20
4 8 5 10 8 16
Holding force [N] 24 2.5 300 48 500 77
50 , 100
Screw lead [mm]
LESH16□ LESH25□
Speed [mm/s] Note1)3)
Work load[kg] Note1)3)
Size LESH8□
50 , 100 , 150Stroke [mm]
Operating humidity range [%RH] 90 or less (No condensation)
50 , 75
Actuation type Slide screw + belt (R/L type) , Slide screw (D type)Impact / vibration resistance [m/sec2] Note5)
HorizontalVertical
Acceleration/Deceleration [mm/s2]
50 / 20
Guide type Linear guide (circulating type)Operating temp. range [℃] 5 to 40
50st : 2.50/2.52
100st : 3.30/3.2775st : 0.70/0.70 100st : 1.60/1.70 150st : 4.26/3.60
Ele
ctric
spe
cific
atio
n
Motor size [mm] 20 28
Rated voltage [VDC] 24+/-10%Power consumption [W] Note6) 20 43 67
42Motor type HB type 2-phase step motor (Unipolar connection)Encoder Incremental A/B phase (800 pulse/rotation)
Moment max. powerconsumption[W] Note8) 35 60 74
Standby power consumption whenoperating [W] Note7) 7 15 13
Lock
uni
t spe
cific
atio
n
Type
Not
e9)
No excitation operating type
3.5 2.9 5Rated voltage [VDC] 24+/-10%Power consumption [W] Note10)
50st:146/100st:177/150st:152
Act
uato
r spe
cific
atio
n
50st : 2.84/2.86
100st : 3.64/3.61
150st : 4.60/3.94
Weight[kg]
Without lockRL type / D
type
50st : 0.55/0.57 50st : 1.15/1.25
With lockRL type / D
type
Static AllowableMoment[Nm]
Pitching 11 50st:26 / 100st:43
Rolling 12 49
50st: 77/100st:112/150st:154Yawing 11 50st:26 / 100st:43 50st: 77/100st:112/150st:154
Lost motion [mm] Note4) 0.15 or less
Pushing force [N] 30to70% Note2)3)
Pushing speed [mm/s]
+/-0.055,000 or less
Positioning repeatability [mm]
50st : -/0.66 50st : -/1.36
75st : 0.79/0.79 100st : 1.71/1.81
Note 1) The speed is dependent on the workload. Check the “Speed-workload graphs” for the selected model in the catalogue
or the operation manual. Note 2) The accuracy of the pushing force is ±20% of the max. pushing force.
The max. setting for the pushing force is 70% of the max. pushing force. Note 3) The speed and force may change depending on the cable length, load and mounting conditions.
Furthemore, if the cable length exceeds 5m then it will decrease by up to 10% for each 5m.(At 15m : Reduced by up to 20%)
Note 4) A reference value for correcting an error in reciprocal operation. Note 5) Impact resistance:
No malfunction occurred when the actuator was tested with a drop tester in both an axial direction and a perpendicular direction to the lead screw. (The test was performed with the actuator in the initial state) Vibration resistance: No malfunction occurred in a test ranging between 45 to 2000 Hz when the actuator was tested in both an axial direction and a perpendicular direction to the lead screw. (The test was performed with the actuator in the initial state)
Note 6) The "Power consumption" (including the controller) is for when the actuator is operating. Note 7) The "Standby power consumption when operating" (including the controller) is for when the actuator is stopped in the
set position with no applied force in the direction of the actuator movement. Note 8) The "Momentary max. power consumption" (including the controller) is for when the actuator is operating.
This value can be used for the selection of the power supply. Note 9) Only applies to actuators supplied with a lock. Note10) For the actuator with lock, please add the power consumption for the lock.

- 12 -
LESH / Servo Motor(24VDC)
2 1 5 2.5 6 40.5 0.25 2 1 2.5 1.5
7.5 to 11 5 to 7.5 17.5 to 35 10 to 20 31 to 62 19 to 38
1 to 200 1 to 400 1 to 200 1 to 400 1 to 150 1 to 400
4 8 5 10 8 16
Type
24 2.5 300 48 500 77
50 , 75
50 / 20Actuation type Slide screw + belt (R/L type) , Slide screw (D type)
Acceleration/Deceleration [mm/s2] 5,000 or less
Lost motion [mm] Note3) 0.15 or less
Size LESH8□A
Speed [mm/s]
Act
uato
r spe
cific
atio
n
Pushing force [N] 50to100%(LESH8[ ]A:50 to 75%) Note2)
Pushing speed [mm/s]
50st : -/0.66
Screw lead [mm]
Operating temp. range [℃]
Impact / vibration resistance [m/sec2] Note4)
LESH16□A LESH25 A
Positioning repeatability [mm] +/-0.05
50 , 100 , 150Work load[kg]
HorizontalVertical
50 , 100Stroke [mm]
Moment max. powerconsumption [W] Note7)
Ele
ctric
spe
cific
atio
n
Motor size [mm]
Motor typeMotor output [W]
Power consumption [W] Note5)
EncoderRated voltage [VDC]
2.9 5
Holding force [N]
Power consumption [W] Note9)
58 84Horizontal : 4Vertical : 7
Standby power consumptionwhen operating [W] Note6)
84 124 158
144Horizontal : 2
Vertical : 15Horizontal : 4
Vertical : 43
Lock
uni
t sp
ecifi
catio
n
Not
e8)
No excitation operating type
24+/-10%
3.5
Rated voltage [VDC]
Weight[kg]
Without lockRL type / D
type
50st : 2.50/-
50st: 77/100st:112/150st:154Yawing 11
75st : 0.70/0.70
50st : 0.55/0.57100st : 3.30/-
100st : 3.64/-
24+/-10%
4210 30 36
Servo motor (Servo 24VDC)Incremental A/B phase (800 pulse/rotation) / Z phase
20 28
50st : 1.15/1.25
50st:146/100st:177/150st:152
11 50st:26 / 100st:43
Rolling 12 49
150st : 4.60/-
150st : 4.26/-
With lockRL type / D
type
50st : -/1.36
75st : 0.79/0.79 100st : 1.71/1.81
50st: 77/100st:112/150st:15450st:26 / 100st:43
100st : 1.60/1.70
50st : 2.84/-
5 to 40Operating humidity range [%RH] 90 or less (No condensation)
Guide type
1 to 20
Static AllowableMoment[Nm]
Pitching
Linear guide (circulating type)
RL
Note 1) LESH25DA is not available. Note 2) The accuracy of the pushing force is ±20% of the max. pushing force. The setting for the pushing force is 50-75% of LESH8[]A pushing force. Note 3) A reference value for correcting an error in reciprocal operation. Note 4) Impact resistance: No malfunction occurred when the actuator was tested with a drop tester in both an
axial direction and a perpendicular direction to the lead screw. (The test was performed with the actuator in the initial state) Vibration resistance: No malfunction occurred in a test ranging between 45 to 2000 Hz. Test was performed in both an axial direction and a perpendicular direction to the lead screw. (The test was performed with the slide table in the initial state.)
Note 5) The "Power consumption" (including the controller) is for when the actuator is operating. Note 6) The "Standby power consumption when operating" (including the controller) is for when the actuator is
stopped in the set position with no applied force in the direction of the actuator movement. Note 7) The "Momentary max. power consumption" (including the controller) is for when the actuator is operating.
This value can be used for the selection of the power supply. Note 8) Only applies to actuators supplied with a lock. Note 9) For the actuator with lock, please add the power consumption for the lock.

- 13 -
2. 2 How to Order
-
*DIN rail is not included. Order it separately.
*Produced upon receipt of order.
*LES□25DA cannot correspond.
*Only "Step motor" can be selected.
*Only avallable for the motor type "Step motor"
*Only "R/L type with ○" can not be selected "With lock".
*2 When "Pulse input type" is selected for controller. Drivertypes, pulse input usable only with differential. Only 1.5mcables usable with collector.
Screw mounting style
DIN rail mounting style*
Screw mounting style
DIN rail mounting style*
LECP6LECP1
LECPMJLECPAJXC9
1 1 axis, DC24V
Screw read (mm)
Nill Basic type
S Dust proof specification
LECP6/LECA6(Step data input type)
LECP1*
(Programless type)
LECPMJ*
(CC-Link Direct input type)
LESH25 ● ●
CPJXC9
*
-T T branch type
●
(EtherNet/IP Direct input type)Controller / Driver type:C9Number of axis and type of power supply
LESH16 ○ ●
AP PNP S Straight type
LECPA*
(Pulse input type)
LESH8 ○ ●
●
AN NPN Nill None
LES25 ○ ● ● ● ●
-
LES16 ○ ○ ● ●
PNPController / Driver type : MJCommunication plug connector
LES8 ○ ○ ●
MJ
NPN
30 50 75 100 125 150
1P
6N NPN
Stroke (mm)
6P PNP
1NK 4 5 8
S Standard cable*
J 8 10 16
R With robotic type cabe
Nill LES□8 LES□16 LES□25
Nill Without cable
Actuator cable type3 3
*2
Controller / Driver type5 5
*2
Nill Without controller / driver type
*1 When "Without controller/driver" is selected forcontroller/driver types, I/O cable cannot be selected.
Nill Without cable
H With side holder (4pcs) (Only "Robotic type cable" can beselected.)
1 1.5A
Servo motor*
LECA6
5 5 C
(DC24V)
Nill Without side holder
NillController / Driver type : 6*,1*,A*I/O cable length (m)*1Mounting style
(*Only "D type" can be selected.)
3 3 B 15*
20*
8 8*
1 1.5 A 10*
Nill
Step motor(Servo DC24V)
D D Type B With lock
Motor type Body option Actuator cable length (m)I/O cable length, Communication plug connector, Number ofaxis and type of power supplyWithout cable
25 R R Type 7
L L Type Nill Without lock 8
SizeNill
D
8Type Controller / Driver type : C9
16Motor option
Table type Controller / Driver option
Nill Low-profile typeController / Driver type : 6*、1*、A*、MJ
H High rigidity type
- R 1 6N 1J 50L E S H 16 R
Caution
The actuator body and controller are sold as a package. If when only the actuator is purchased separately, confirm that the combination of the controller, which you have and the actuator is compatible. / See 5.3 Caution(1) on p.40
<Be sure to check the following before use.> (1) Check that actuator label for model number.
This matches the controller. (2) Check Parallel I /O configuration matches (NPN or PNP).
(1)
(2)
LESH8RJ-50 NPN

- 14 -
2.3 Construction ・LES*R / LES*L
Component parts Maintenance parts/beltNo. Description Material Remarks Size Part number 備考
1 Motor - -2 Body Aluminum alloy Hard anodized3 Teble Stainless steel Heat treated LES16□ LE-D-1-2 ―4 Guide block Stainless steel Heat treated LES25□ LE-D-1-3 ―5 Lead screw Stainless steel Special treatment LES25□A LE-D-1-4 ―6 End plate Aluminum alloy Hard anodized7 Pulley cover Plastic -8 End cover Plastic -9 Rod Stainless steel -
Carbon steel Electroless nickel plated Maintenance parts/greaseCopper alloy Electroless nickel plated(LES25R/L* only) Parts Order number
11 Motor plate Aluminum alloy - GR-S-010(10g)12 Socket Carbon steel Electroless nickel plated GR-S-020(20g)13 Lead screw pulley Aluminum alloy -14 Motor pulley Aluminum alloy -15 Spacer Stainless steel LES25R/L* only16 Origin stopper Carbon steel Electroless nickel plated17 Bearing - -18 Belt - -19 Grommet Plastic -20 Cap Silicone rubber -21 Simring Steel -22 Stopper Carbon steel -23 Bushing - Dust proof only24 Pulley gasket NBR Dust proof only25 End gasket NBR Dust proof only26 Scraper NBR Dust proof only27 Cover Plastic -28 Return guide Plastic -29 Cover Support Stainless steel -30 Steel ball High carbon chrome bearing steel -31 Lock - With lock only
Table
10 Bearing holder
Without manualoverride screw
LE-D-1-1LES8□
LES8□ LE-D-1-5 With manualoverride screw
R type as shown L type opposite as shown

- 15 -
・LES*D Component parts Option parts/Side holderNo. Description Material Remarks Model Part number
1 Motor - - LES8D LE-D-3-1
2 Body Aluminum alloy Hard anodized LES16D LE-D-3-2
3 Table Stainless steel Heat treatment + Electroless nickel LES25D LE-D-3-3
4 Guide block Stainless steel Heat treatment5 Lead screw Stainless steel Heat treatment + Special plated6 End plate Aluminum alloy Hard anodized Maintenance parts/grease7 Motor flange Aluminum alloy Hard anodized Parts Order number8 Stopper Carbon steel - GR-S-010(10g)9 Motor cover Aluminum alloy Hard anodized GR-S-020(20g)10 End cover Aluminum alloy Hard anodized11 Motor end cover Aluminum alloy Hard anodized12 Rod Stainless steel -
Carbon steel Electroless nickel platedCopper alloy Electroless nickel plated(LES25D* only)
14 Socket Carbon steel Electroless nickel plated15 Hub(Screw side) Aluminum alloy -16 Hub(Motor side) Aluminum alloy -17 Spacer Stainless steel LES25D* only18 Grommet NBR -19 Spider NBR -20 Cover Plastic -21 Return guide Plastic -22 Cover Support Stainless steel -23 Steel ball Special steel -24 Bearing - -25 Shim ring Carbon steel -26 Masking tape - -27 Bushing - Dust proof only28 Scraper NBR Dust proof only / rod part29 Lock - With lock only30 Side Holder Aluminum alloy Hard anodized
13 Bearing holder
Table
Bundled shipment

- 16 -
・LESH*R / LESH*L Component parts Maintenance parts/beltNo. Description Material Remarks Size Part number1 Motor - - LESH8□ LE-D-1-12 Body Aluminum alloy Hard anodized LESH16□ LE-D-1-23 Teble Stainless steel Heat treated LESH25□ LE-D-1-34 Guide block Stainless steel Heat treated LESH25□A LE-D-1-45 Lead screw Stainless steel Special treatment
6 End plate Aluminum alloy Hard anodized7 Pulley cover Plastic - Maintenance parts/grease8 End cover Plastic - Parts Order number9 Rod Stainless steel - GR-S-010(10g)
Carbon steel Electroless nickel plated GR-S-020(20g)Copper alloy Electroless nickel plated(LESH25R/L* only)
11 Motor plate Aluminum alloy -12 Lock nut Special steel Chromate
13 Socket Carbon steel Electroless nickel plated
14 Lead screw pulley Aluminum alloy -15 Motor pulley Aluminum alloy -16 Spacer Stainless steel LESH25R/L* only17 Stopper Carbon steel Electroless nickel plated18 Bearing - -19 Belt - -20 Grommet Plastic -21 Simring Steel -22 Bushing - Dust proof only23 Pulley gasket NBR Dust proof only24 End gasket NBR Dust proof only25 Scraper NBR Dust proof only26 cover Plastic -27 Return guide Plastic -28 Scraper Stainless steel and NBR Linear guide29 Steel ball High carbon chrome bearing steel -
30 Lock - With lock only
Table10 Bearing holder
R type as shown L type opposite as shown

- 17 -
・LESH*D Component parts Option parts/Side holderNo. Description Material Remarks Model Part number
1 Motor - - LESH8D LE-D-3-1
2 Body Aluminum alloy Hard anodized LESH16D LE-D-3-2
3 Table Stainless steel Heat treatment + Electroless nickel LESH25D LE-D-3-3
4 Guide block Stainless steel Heat treatment5 Lead screw Stainless steel Heat treatment + Special plated6 End plate Aluminum alloy Hard anodized Maintenance parts/grease7 Motor flange Aluminum alloy Hard anodized Parts Order number8 Motor cover Aluminum alloy Hard anodized GR-S-010(10g)9 End cover Aluminum alloy Hard anodized GR-S-020(20g)10 Motor end cover Aluminum alloy Hard anodized11 Rod Stainless steel -
Carbon steel Electroless nickel platedCopper alloy Electroless nickel plated(LESH25R/L* only)
13 Socket Carbon steel Electroless nickel plated14 Hub(Screw side) Aluminum alloy -15 Hub(Motor side) Aluminum alloy -16 Spacer Stainless steel LESH25D* only17 Grommet NBR -18 Spider NBR -19 Cover Plastic -20 Return guide Plastic -21 Scraper Stainless steel + Linear guide part22 Steel ball Special steel -23 Bearing - -24 Shim ring Carbon steel -25 Masking tape - -26 Scraper NBR Dust proof only / rod part27 Lock - With lock only28 Side Holder Aluminum alloy Hard anodized
12 Bearing holder
Table
Bundled shipment

- 18 -
or
●Communication cable
PC
●Conversion unit
PLC
Power supply 24VDC
●USB cable (A-miniB type)
●Controller
●Controller setting kit (Controller setting software, Communication cable, Conversion unit and USB cable are included.)
Part No:LEC-W2
3. Product Outline 3.1 System construction
Warning Refer to the operation manual of the LEC (controller) for detailed wiring. / See “4 Wiring of cables” on p.37. Communication cable is to be connected to PC by USB cable through conversion unit. And do not connect teaching box to PC.
Do not connect the teaching box directly to the PC as there maybe fire risk and damage to the PC or teaching box.
The actuator body and controller are sold as a package. If when only the actuator is purchased separately, confirm that the combination of the controller, which you have and the actuator is compatible. /See 5.3 Caution(1) on p.40
<Be sure to check the following before use.> (1) Check that actuator label for model number.
This matches the controller. (2) Check Parallel I/O configuration matches (NPN or PNP).
●I /O cable Part No:LEC-CN5-∗
●Teaching box (with a cable of
3m long) Part No:LEC-T1-3EG∗
●Power supply plug <Applicable cable size>
AWG20 (0.5mm2)
To CN5
●Electric slide table
Option
Controller power supply
24VDC
To CN4
To CN1
To CN2
To CN3
(1)
(2)
LESH8RJ-50 NPN
Note 1): These items are included when it is selected by ordering code.
Note 2): When conformity to UL is required, the electric actuator and controller should be used with a UL1310 Class 2 power supply.
Note 1)
Note 1)
Motor cable
Note 2)
●Actuator cable Part No: -LE-C*-*-* (Robotic type cable) -LE-C*-*S-* (Standard cable)
Note 1)
Note 2)

- 19 -
3.2 Setting Function Refer to the operation manual of the controller (LEC series) for the detail of the setting function.
Easy Mode for simple setting >Select “Easy mode” for instant operation Controller setting software Setting and operation, such as the step data setting, test drive and JOG / fixed-distance moving, can
be performed on the same page.
Teaching box Setting and operation by the simple screen without scrolling. Select function by the iconized menu at the first page. Step data setting and monitoring at the second page.
Positioning data setting
Fixed distance moving
Speed setting of JOG / fixed distance
JOG moving
Start testing
Data Axis 1 Step No. 0 Posn 123.45mm speed 400mm/s
It can be registered by “SET” after entering the values.
Operation status can be checked
1st screen
2nd screen 2nd screen
Example of setting the step data Example of checking the operation status
1st screen
Monitor Axis 1 Step No. 1 Posn 12.34mm speed 50mm/s
アラーム ALARM
ジョグ JOG
設定 SETTING
テスト TEST
モニタ MONITOR
データ DATA
アラーム ALARM
ジョグ JOG
設定 SETTING
テスト TEST
モニタ MONITOR
データ DATA

- 20 -
Normal mode for the detailed setting >Select “Normal mode” if the detailed setting are necessary. Step data can be set in detail. Parameters can be set. Signals and terminal condition can be monitored. JOG and fixed distance movement, return to origin position, test operation and testing of compulsory
output can be done. Controller setting soft ware Every function, step data, parameter, monitor and teaching are indicated in a different window.
Teaching box The data in the controller can be saved / forwarded in this teaching box. Continuous test operation can be made after specifying five step data.

- 21 -
Controlled items
PC: Controllersetting software TB:Teaching box○:Available function ×:Not available function
PC TB PC/TB
Movement method It can be selected of absolute / relative position move ○ × ○
Speed It can be set by the unit of 1mm/s. ○ ○ ○
Position It can be set by the unit of 0.01mm. ○ ○ ○
AccelerationDeceleration It can be in units of 1mm/s2. ○ ○ ○
Pushing forceIt can be set in units of 1% from 30% to 70%(Step motor). 50% to 100%(Servo motor) *LES*[ ]RA:50% to 75%Positioning operation: Set to 0%.
○ ○ ○
Trigger LV Trigger LV of target force when pushing operation: It can be set by the unit of 1% from30% to 70%(Step motor). 50% to 100%(Servo motor) *LES[ ]8RA:50% to 75% ○ × ○
Pushing speed It can be set in units of 1mm/s. Minimun speed~20mm/s. ○ × ○
Moving force Step motor : 100%(Please do not change. )Servo motor : 250%(Please do not change. ) ○ × ○
Area output It can be set in units of 0.01mm. ○ × ○
In position During positioning operation: Width to the target position. It should be set to 0.5 or more.During holding operation: How much it moves during holding operation. ○ × ○
Stroke(+) + side limit of position (It can be set in units of 0.01mm) × × ○
Stroke(-) - side limit of position (It can be set in units of 0.01mm) × × ○
ORIG direction Sets the direction of return to origin operation (CW / CCW) × × ○
ORIG speed Speed when returning to origin position can be set × × ○
ORIG ACC/DEC Acceleration when returning to origin position can be set. × × ○
JOG It can make continuous operation at the set speed while the switch is being pressed. ○ ○ ○
MOVE It can make test operation at the set distance and speed from the current position whenthe switch is pressed. ○ × ○
Return to ORIG Test of return to origin position can be done. ○ ○ ○
Test drive The operation of the specified step data can be tested. ○ ○○
(Continuousoperation)
Force output ON/OFF of the output terminal can be tested. × × ○
DRV mon Current position, current speed, current thrust and the specified step data No. can bemonitored. ○ ○ ○
In/Out mon Current ON/OFF status of the input and output terminal can be monitored. × × ○
Status The alarm currently being gen erated can be confirmed, and be reset. ○ ○ ○
ALM Log record The alarm generated in the past can be confirmed. × × ○
File Save・Load The step data and parameter of the objective controller can be saved, forwarded anddeleted. × × ○
Others Language Language can be changed to Japanese/English. ○*3
○*2
○*2 *3
*1 Every parameter is set to the recommended condition before ex-factory. Change the setting of only the items which requires adjustment.
*2 Teaching box:It can be indicated in English. English and Japanese switch setting is only available in the normal mode.
*3 Controller setting software : It can be installed by selecting English version or Japanese version
ALM
Parameter(Excerpt)
Test
Monitor
Function ContentEasy Mode
Normalmode
Step data(Excerpt)

- 22 -
3.3 Step data setting Refer to the operation manual of the controller (LEC series) for details. This operation manual specifies the electric slide table, if an actuator other than the electric slide table is used, refer to the operation manual of each type of actuator and controller (LEC series) regarding the description of step data.
Caution The actuator body and controller are sold as a package.
If when only the actuator is purchased separately, confirm that the combination of the controller, which you have and the actuator is compatible. /See 5.3 Caution(1) on p.40
<Be sure to check the following before use.> (1) Check that actuator label for model number.
This matches the controller. (2) Check Parallel I /O configuration matches (NPN or PNP).
Positioning operation
In the positioning operation, the electric slide table transfers to and stops at the target position. The following image shows the set items and operation. <Confirmation of reaching of target position at the positioning operation>
When the table of actuator reaches the range of the target position, the output signal 【INP】 (in position) is outputted. When the table of actuator enters the range of 【in position】, the INP output signal turns on.
Caution Please use by "Pushing Mode" when you make it Push or clamp. The product might be damaged by the impact when using it by "Positioning Mode".
/ See 6.2 Caution(2) on p.43
(1)
(2)
LESH8RJ-50 NPN
Speed
Acceleration Deceleration Speed
ON INP output
Position
ON OFF
In pos

- 23 -
<Items and set values in positioning operation> Step No. 0: Positioning operation
a b c d e f g h i j k
[◎] Need to be set - [○] Need to be adjusted as required- [×] Not used. Items don't need to be changed.
a < ◎ Movement MOD > When the absolute position is required, set Absolute When the relative position is required, set Relative
→ Absolute: Distance from the origin position. Relative: Feed from the current position.
b < ◎Speed > Transfer speed to the target position.
C < ◎Position > Target position.
d < ○ Acceleration > The parameter which defines how rapidly the actuator reaches the speed set in b The higher the set value, the faster it reaches the speed set in b
e < ○ Deceleration > The parameter which defines how rapidly the actuator comes to stop.
The higher the set value, the quicker it stops. f < ◎Pushing force > Set 0.
(If values other than 0 set the operation will be changed to the pushing operation.)
g < × Trigger LV > h < × Pushing speed > i < × Moving force > Max. Force at the positioning operation.
The force is automatically adjusted corresponding to the load. Step motor : Set [100] % (Please do not change) Servo motor : Set[250]% (Please do not change)
j < ○Area1, Area2 > This is the condition that turns on the AREA output signal.
The setting condition should be Area 1<Area 2. It is possible to set at relative operation. The position will be Absolute (position from the origin). Example) In case of Step no.0
[AREA] output signal is outputted between Area 1:48 and Area 2:50. k < ○In position > This is the condition that turns on the INP (in position) output signal.
→When the electric slide table reaches the range of the target position, the INP output signal is output. When the electric slide table enters the range of [in position], the INP output signal turns on. When it is necessary to output the target position reaching signal earlier, make the value larger. Note) Default: Set the value more than [0.50]. Example) In case of Step no.0 Position: 50 – In position: 0.5 = [INP] is outputted from the value of 49.5.

- 24 -
Pushing operation
The table move to the target position and hold a work piece with the set pushing force. The figure shows setting items and operation. The setting items and values are described below.
<Confirmation of reaching the target value during the pushing operation>
The target position reached signal INP (in position) is generated when the target pushing force (Trigger LV) is achieved. Also, if the actual pushing force exceeds the Trigger LV, the INP signal is turned on.
Caution Please use it by "Pushing Mode" when you make it push or clamp. The product might be damaged by the impact when using it by "Positioning Mode".
/ See 6.2 Caution(2) on p.43
Speed
Acceleration Deceleration
In pos
Speed
Position
Pushing force
Trigger LV
INP output
Pushing speed

- 25 -
<Items and setting values of pushing operation> Step no. 1: Pushing operation
a b c d e f g h i j k
[◎] Need to be set - [○] Need to be adjusted as required -[×] Not used. Items don't need to be changed.
a < ◎Movement MOD > When the absolute position is required, set Absolute When the relative position is required, set Relative
Absolute: Distance from the origin position. Relative: Feed from the current position b < ◎ Speed > Transfer speed to the target position c < ◎Position > Target position / The pushing starting position is set forward by 0.5mm or
more of the pushing object. d < ○ Acceleration > The parameter which defines how rapidly the actuator reaches the speed set In.
The higher the set value, the faster it reaches the speed set in.
e < ○ Deceleration > The parameter which defines how rapidly the actuator comes to stops. The higher the set value, the quicker it stops.
F < ◎ Pushing force > Pushing force ratio is defined. Note) :Step motor - Settable range 30 to 70 % Note) :Servo motor-Settable range 50 to 100(75) % Pushing F(%) Duty ratio (%) Continuous pushing time
(minute) Pushing F(%) Duty ratio (%) Continuous pushing time
(minute) 30 - - 50 - -
50 or less 30 5 75 or less 30 5 70 or less 20 3 100 or less 20 3
e.g. If the pushing force is <50% the pushing time can be 5 minutes and the duty ratio of 30%. - The pushingF of LES*8*A (servo motor) is up to 75% or less. g < ◎ Trigger LV > The condition at which INP output signal is turned on. Set it below the
pushing force setting value of the pushing force within the range. The INP output signal is given when the target force (Trigger LV) is achieved. The INP output signal is turned on when the generated force exceeds the value. / See 6.2 Caution(1) on p.43
h < ◎ Pushing speed > The pushing speed whilst in pushing mode. 【Minimum speed~20 mm /s】 and 【Speed or more Pushing Speed】 (Please do not change) The speed can be set from the specified minimum to a maximum of 20mm/s. If the speed is too high, the actuator or work piece can be damaged by impact.
i < ×Moving force > The upper force limit for the pushing operation starting position
The force is automatically adjusted corresponding to the load.
j < ○Area1,Area2 > This is the condition that turns on the AREA output signal. The setting condition should be Area 1<Area 2. It is possible to set at Relative operation. The position will be Absolute (position from the origin).
k < ◎ In position > The transfer distance (relative value) when pushing
If the transferred distance exceeds the setting, it stops even if it is not pushing. If the transfer distance is exceeded, the INP output signal will not be turned on. (incomplete pushing) Example) In case of Step no.1 / Position: 40 + In Position: 10 = 50 (The position where the incomplete pushing is detected.)

- 26 -
Example of step data entry (1) 〈 Positioning operation - 【INP】output signal, 【AREA】output signal 〉
a b c d e f g h i j k
No. Move M Speed Position Accel Decel PushingF TriggerLV PushingSp MovingF Area1 Area2 In posmm/s mm mm/s^2 mm/s^2 % % mm/s % mm mm mm
0 Absolute 100 100.00 3000 3000 0 0 0 100 80.00 90.00 0.50
・Step data no.0 : Positioning operation (It moves from Position:0[mm] to Position:100[mm])
Condition 1) The 【AREA】output signal is not used.
Condition 2) The 【AREA】output signal is used. *The 【AREA】output signal is a signal output when the rod traverses through a certain range (The step data: Area 2 from Area 1).
This feature is useful when an output to check the rod position at intermediate stroke is required.
1000
ONOFF
0 10 20 30 40 50 60 70 80 90 100Stroke [mm]
100.599.5
【INP】
Output signal
Speed[mm/s]b
In pos[mm]k
(【INP】
Output condition)
Position[mm]c
1000
Speed[mm/s]
ONOFF
ONOFF
b
0 10 20 30 40 50 60 70 80 90 100Stroke [mm]
100.599.5
In pos[mm]k
(【INP】
Output condition)【INP】
Output signal
【AREA】
Output signal
Area1[mm]j
Area2[mm]j
Position[mm]c・ The 【 AREA 】 output signal is
turned on from Area 1:80[mm]
between Area 2:90[mm].
・The 【INP】output signal is turned
on from 100[mm] - 0.5[mm]=99.5[mm]
The 【INP】output signal is turned
on from 100[mm] - 0.5[mm]=99.5[mm]

- 27 -
Example of step data entry (2) 〈 Pushing operation - 【INP】output signal, 【AREA】output signal 〉
a b c d e f g h i j k
No. Move M Speed Position Accel Decel PushingF TriggerLV PushingSp MovingF Area1 Area2 In posmm/s mm mm/s^2 mm/s^2 % % mm/s % mm mm mm
0 Absolute 100 70.00 3000 3000 60 30 20 100 60.00 80.00 25.00
・Step data no.0 : Positioning operation. (It moves to 90mm after it moves from 0mm to 70mm.)
Condition 1) The 【AREA】output signal is not used.
Condition 2) The 【AREA】output signal is used. * The 【AREA】output signal is a signal output when the rod traverses through a certain range (The step
data: Area 2 from Area 1). This feature is useful when an output to check the rod position at intermediate stroke is required.
【INP】
Output signal
200
Speed[mm/s]
ONOFF
b100
60
0
PushingF[%]f30
g TriggerLV[%]
Position[mm]cIn pos[mm]k
PushingSp[mm/s]h
【AREA】
Output signalON
OFF
Area1[mm]jArea2[mm]j
(【INP】
Output condition)
0 10 20 30 40 50 60 70 80 90 100Stroke [mm]
200
ONOFF
100
60
030
0 10 20 30 40 50 60 70 80 90 100Stroke [mm]
g TriggerLV[%](【INP】
Output condition)
【INP】
Output signal
PushingF[%]f
Speed[mm/s]b
Position[mm]cIn pos[mm]k
PushingSp[mm/s]h
・The 【AREA】output signal is
turned on from Area 1:60[mm]
between Area 2:80[mm].
・The 【INP】output signal is turned on when trigger LV : 30[%] is exceeded.
・The 【INP】output signal is turned on when trigger LV : 30[%] is exceeded.
/See 6.2 caution(1) on p.43
- 28 -
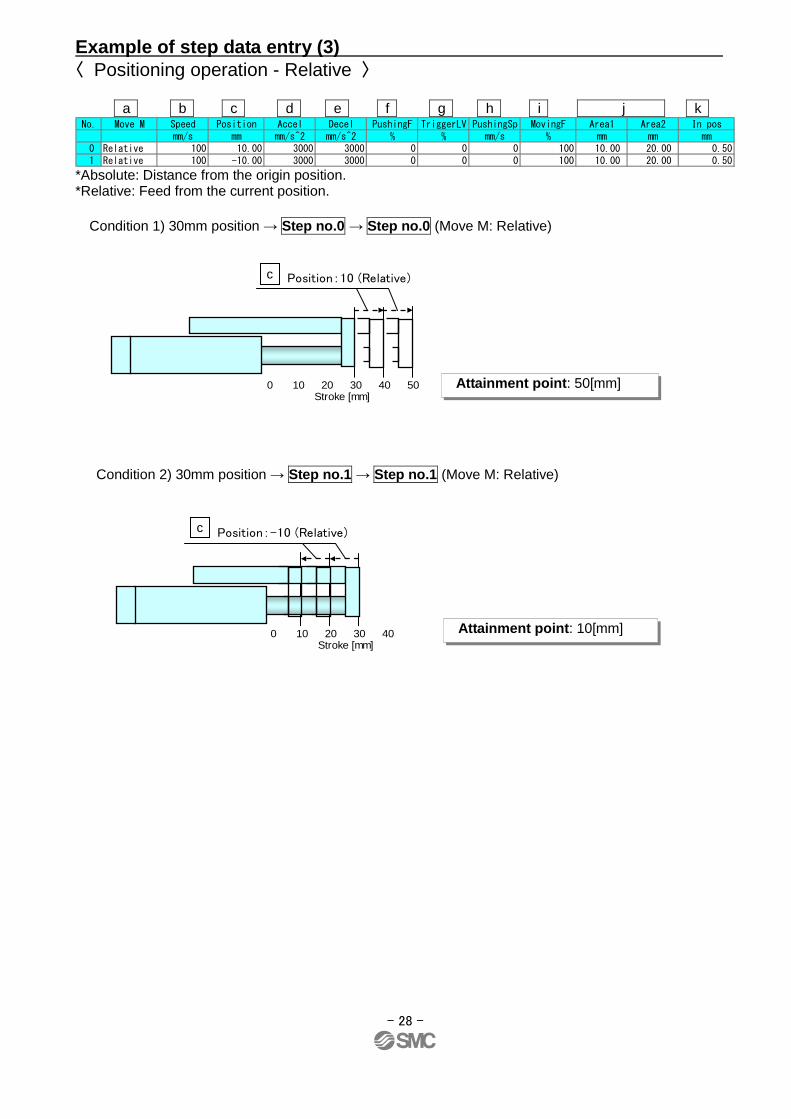
Example of step data entry (3) 〈 Positioning operation - Relative 〉
a b c d e f g h i j k No. Move M Speed Position Accel Decel PushingF TriggerLV PushingSp MovingF Area1 Area2 In pos
mm/s mm mm/s^2 mm/s^2 % % mm/s % mm mm mm0 Relative 100 10.00 3000 3000 0 0 0 100 10.00 20.00 0.501 Relative 100 -10.00 3000 3000 0 0 0 100 10.00 20.00 0.50
*Absolute: Distance from the origin position. *Relative: Feed from the current position.
Condition 1) 30mm position → Step no.0 → Step no.0 (Move M: Relative)
Condition 2) 30mm position → Step no.1 → Step no.1 (Move M: Relative)
0 10 20 30 40 50Stroke [mm]
Position:10 (Relative)c
0 10 20 30 40Stroke [mm]
Position:-10 (Relative)c
Attainment point: 50[mm]
Attainment point: 10[mm]

- 29 -
Example of step data entry (4) 〈 Pushing operation - In position 〉
a b c d e f g h i j k No. Move M Speed Position Accel Decel PushingF TriggerLV PushingSp MovingF Area1 Area2 In pos
mm/s mm mm/s^2 mm/s^2 % % mm/s % mm mm mm0 Absolute 100 20.00 3000 3000 60 30 20 100 10.00 20.00 20.00
・ Step data no.0 : Pushing operation ("Pushing operation" is done during 20mm after it moves from 0mm to 20mm.)
Condition 1) Length to work < In position
Condition 2) Length to work > In position
W
(Length to w ork)
20
Position[mm]c
0 10 20 30 40 50Stroke [mm]
10
In pos[mm]k
W
In pos[mm]k
30
20
Position[mm]c
0 10 20 30 40 50Stroke [mm]
(Length to work)
・ k In pos ≧ Length to work
・Actual force ≧ g TriggerLV
The 【INP】 output signal is
turned on
【INP】Output condition
・ k In pos < Length to work
・Actual force < g TriggerLV
The 【 INP】 output signal is
not turned on
The 【BUSY】 output signal is turmed off
【INP】Output condition

- 30 -
Example of step data entry (5) 〈 Pushing operation – Driving starting position 〉 The pushing action is different and dependent upon the starting position and derection. Confirm the position where the pushing operation starts.
a b c d e f g h i j k No. Move M Speed Position Accel Decel PushingF TriggerLV PushingSp MovingF Area1 Area2 In pos
mm/s mm mm/s^2 mm/s^2 % % mm/s % mm mm mm0 Absolute 100 0.00 3000 3000 0 0 0 100 10.00 20.00 0.501 Absolute 100 50.00 3000 3000 0 0 0 100 10.00 20.00 0.502 Absolute 100 30.00 3000 3000 60 30 20 100 10.00 20.00 10.00
Condition 1) In case the pushing operation is Step no.0 to Step no.2.
Condition 2) In case the pushing operation is Step no.1 to Step no.2.
In pos[mm]kPosition[mm]c
0 10 20 30 40 50Stroke [mm]
Position[mm]cIn pos[mm]k
0 10 20 30 40 50Stroke [mm]
Attainment point: 40[mm]
Attainment point: 20[mm]

- 31 -
Operating procedure and input / output signals for each operation The input / output signal and the operation description for operating this electric actuator are as follows. 1) Signals along with the operation procedures
In case the operation order is 1. Supply power to the motor 2. Retune to origin 3.Step no. 1 4.Step no. 2 5.Cut power to the motor
Note 1) [●] means ON, [ ] means OFF. Note 2) The origin has been recognized when the operation is repeated, so it can operate without the
procedure item 2. Note 3) The out* signals are reset on the rising edge of the Drive signal. The Out* signal are latched with
the data from the IN* data on the falling edge of the drive pulse. Note 4) When the alarm is generated, the alarm group is displayed by the combination of output signal,
"OUT*". Please confirm controller (LEC series) manual to a detailed content of the alarm.
Note 5) Leave an interval of 15ms (the recommendation is 30ms) or more between input signals and maintain the state of the signal for 15ms (the recommendation is 30ms) or more, because PLC processing delays and controller scanning delays can occur.
Procedure Input signal Output signal to the input signal Operation description
1 SVON(Servo on)[ ● ] SVRE(Servo ready) [ ● ] Power is supplied to the motor, and detection of the magnetic pole position. =Complete.
2 SETUP [ ● ] SETON [ ● ] INP(IN position)[ ● ]
Return to the origin. =Complete.
3
IN0 [ ● ] IN1 [ ] IN2 [ ] IN3 [ ] IN4 [ ] IN5 [ ]
↓ DRIVE [ ● ] [ ] note.3)5)
OUT0 [ ● ] OUT1 [ ] OUT2 [ ] note3.4) OUT3 [ ] OUT4 [ ] OUT5 [ ]
↓ After reaching of target
position,INP[ ● ] After stopping motion
BUSY [ ]
Step no.1 is selected, and the operation starts. =Completion.
4
IN0 [ ] IN1 [ ● ] IN2 [ ] IN3 [ ] IN4 [ ] IN5 [ ]
↓ DRIVE [ ● ]⇒[ ] note.3)5)
OUT0 [ ] OUT1 [ ● ] OUT2 [ ] note.3.4) OUT3 [ ] OUT4 [ ] OUT5 [ ]
↓ After reaching of target
position INP [ ● ] After stopping motion
BUSY[ ]
Select the step no. 2, and the operation starts. =Complete.
5 SVON [ ] SVRE [ ]
SETON [ ● ] note.2) INP [ ● ]
Power to the motor is removed.

- 32 -
2) Signals when Stopped: In the event when “EMG” is used / See 5.1 Warning (9) on p. 38
The operating sequence is 1.”Stop” 2.Release the “Stop”
Procedure Input signal Output signal to the input signal Operation description
1 EMG:Not energizing (TB / Stop switch:Locking)
*ESTOP[ ] SVRE [ ] SETON [ ● ]
Power to the motor is cut by the “Stop” command regardless of whether it is operating or stopping.
2 EMG: Energizing (TB / Stop switch:
Releasing
*ESTOP[●] SVRE [ ● ]
SETON [ ● ] Note 2) The stop is released.
Note 1) [●] means ON, [ ] means OFF. *means negative logic Note 2) SETON signal does not change after releasing the “STOP”. . Note 3) If the stop is input from the EMG or RESET terminal or the stop-switch on the connected Teaching
Box during pushing operation, the actuator stop. (“Busy”signal turns OFF) And if the actuator stop within the range of ”Position”± ”In pos” defined in step data,output signal “INP” turns ON.
- 33 -
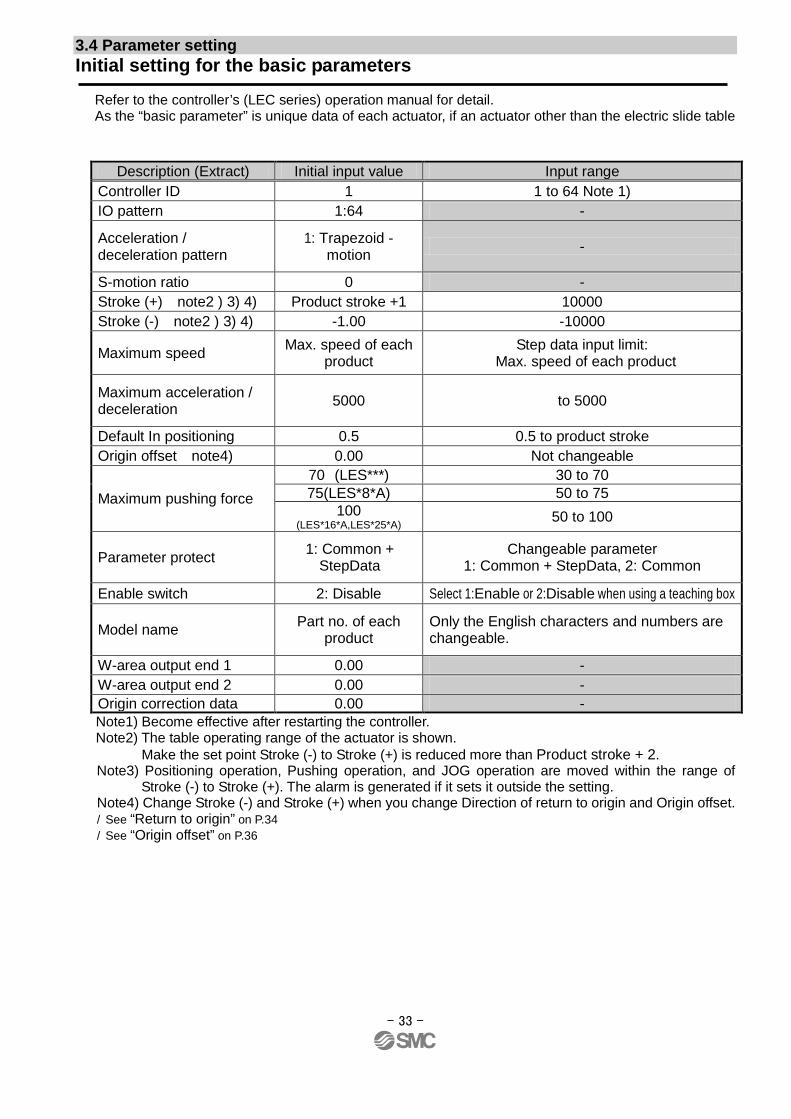
3.4 Parameter setting Initial setting for the basic parameters
Refer to the controller’s (LEC series) operation manual for detail. As the “basic parameter” is unique data of each actuator, if an actuator other than the electric slide table
Note1) Become effective after restarting the controller. Note2) The table operating range of the actuator is shown.
Make the set point Stroke (-) to Stroke (+) is reduced more than Product stroke + 2. Note3) Positioning operation, Pushing operation, and JOG operation are moved within the range of
Stroke (-) to Stroke (+). The alarm is generated if it sets it outside the setting. Note4) Change Stroke (-) and Stroke (+) when you change Direction of return to origin and Origin offset. / See “Return to origin” on P.34 / See “Origin offset” on P.36
Description (Extract) Initial input value Input range Controller ID 1 1 to 64 Note 1) IO pattern 1:64 -
Acceleration / deceleration pattern
1: Trapezoid - motion -
S-motion ratio 0 - Stroke (+) note2 ) 3) 4) Product stroke +1 10000 Stroke (-) note2 ) 3) 4) -1.00 -10000
Maximum speed Max. speed of each product
Step data input limit: Max. speed of each product
Maximum acceleration / deceleration 5000 to 5000
Default In positioning 0.5 0.5 to product stroke Origin offset note4) 0.00 Not changeable
Maximum pushing force 70 (LES***) 30 to 70 75(LES*8*A) 50 to 75
100 (LES*16*A,LES*25*A) 50 to 100
Parameter protect 1: Common + StepData
Changeable parameter 1: Common + StepData, 2: Common
Enable switch 2: Disable Select 1:Enable or 2:Disable when using a teaching box
Model name Part no. of each product
Only the English characters and numbers are changeable.
W-area output end 1 0.00 - W-area output end 2 0.00 - Origin correction data 0.00 -

- 34 -
Initial setting for the ORIG parameters
Refer to the controller’s (LEC series) operation manual for detail. As the “basic parameter” is unique data of each actuator, if an actuator other than the electric slide table is used, refer to the operation manual of each actuator and the controller’s (LEC series) operation manual for the ORIG parameter.
Note1) CCW direction: Extended CW direction: Retracted. Become effective after restarting the controller.
Note2) Return to origin cannot return while operating / See 5.1 Caution(4) on p.39
<Return to origin> Before the positioning and pushing operation, “return to origin” is necessary to establish the origin. The current position value of the electric slide table increases if the table move (move in the CW direction). (The default value of CW table moving direction cannot be increased.)
1) Sequence of return to origin Input the origin signal → Move toward origin → Stop moving (pushing) → Move in the opposite direction → Origin
WARNING Do not alter any parameter except the ones shown. Or else there is a possibility of damage.
Description (Extract) Initial input value Input range
ORIG direction Note1) 2:CCW 1:CW , 2:CCW ORIG mode 1:ORIG Press -
ORIG limit LES***:100 -
LES***A:250 ORIG time 100 - ORIG speed LES***K:10~20、 LES***J:20
- ORIG ACC /DEC 100 - Creep speed 10 - ORIG sensor 0: Disable -
Initial set value for the electric
actuator
Retracted direction (CCW direction)
Stroke end of Retracted direction
Moving distance 1mm
(Not changeable)

- 35 -
2) Method of changing direction of origin Use the following procedures when you change the direction of the origin.
Procedure 1- In the [Parameter] 01 dialogue box select the ORIG tab.
And the direction of the starting point return is changed from CCW to CW.
Procedure 2- In the [Parameter] 01 dialogue box select the BASIC tab. Alter stroke (- /+) as per the following example.
Example ) For a product with stroke 50mm
Stroke (-): enter [-51] Stroke (+): enter [1]
Procedure 3- In the [Parameter] 01 dialogue box press the "Download All" radio button.
Procedure 4- Power supply OFF (→ Power supply ON)

- 36 -
<Origin offset> The origin offset means the value of the origin. (Origin offset=origin) When the parameter is changed, the current position is changed. The step data should be checked again. In addition, the value of basic parameter "stroke (+)" and "Stroke (-)" changed. Example of setting origin offset) Actuator stroke 75mm Origin offset “0" Origin offset “10"
Origin
0 75
Origin
10 85 1. About the change in the basic parameter When the origin offset is changed, it is necessary basic parameter "Stroke (+) and stroke (-)" to change. 1.1 Origin direction: CCW Example) Actuator stroke 75mm
Origin offset=0
-1 0 75 76
Stroke(-) Origin Stroke(+)
※ ※
Origin offset=10
9 10 85 86
Stroke(-) Origin Stroke(+)
※ ※
1.2 Origin direction: CW
Example) Actuator stroke 75mm Origin offset=0
-76 -75 0 1
Stroke(-) Origin Stroke(+)
※ ※
Origin offset=10
-66 -65 10 11
Stroke(-) Stroke(+)
※ ※
Origin
Origin offset=-10
-86 -85 -10 -9
Stroke(-) Stroke(+)
※ ※
Origin

- 37 -
4. Wiring of cables / Common precautions Warning
1. Adjusting, mounting or wiring change should never be done before shutting off the power supply to the product. Electrical shock, malfunction and damaged can result.
2. Never disassemble the cable. Use only specified cables. 3. Never connect or disconnect the cable or connector with power on.
Caution 1. Wire the connector securely. Do not apply any voltage to the terminals other than those
specified in the product manual. 2. Wire the connector securely.
Check for correct connector wiring and polarity. 3. Take appropriate measures against noise.
Noise in a signal line may cause malfunction. As a countermeasure, separate high voltage and low voltage cables, and shorten wiring lengths, etc.
4. Do not route wires and cables together with power or high voltage cables. The product can malfunction due to interference of noise and surge voltage from power and high voltage cables to the signal line. Route the wires of the product separately from power or high voltage cables.
5. Take care that actuator movement does not catch cables. 6. Operate with cables secured. Avoid bending cables at sharp angles where they enter the product. 7. Avoid twisting, folding, rotating or applying an external force to the cable.
Risk of electric shock, wire break, contact failure and loss of control for the product can happen. 8. Fix the cable protruding from the product in place before using.
The motor and lock cables are not robotic type cables and can be damaged when moved. Therefore fix the cables and the connectors (part “A” in figure below) when set up.
9. Select “Robotic type cables” in case of inflecting actuator-cable repeatedly. And do not put cables into a flexible moving tube with a radius smaller than the specified value. (Min. 50mm). Risk of electric shock, wire break, contact failure and loss of control for the product can happen if “Standard cables” are used in case of inflecting the cables repeatedly.
10. Confirm proper wiring of the product. Poor insulation (interference with other circuits, poor insulation between terminals and etc.) can apply excessive voltage or current to the product causing damage.
11. The Speed / pushing force may vary, depending on the cable length, load and mounting conditions etc. If the cable length exceeds 5m, the speed / pushing force will be reduced 10% per 5m as the maximum. (If cable length is 15m: 20% reduction as the maximum.)
[Transportation]
Caution 1. Do not carry or swing the product by the motor or cable.

- 38 -
5. Electric actuators / Common precautions 5.1 Design and selection
Warning 1. Be sure to read the operation manual (this manual and the one for the controller: LEC series).
Handling or usage/operation other than that specified in the Operation Manual may lead to breakage and operation failure of the product. Any damage attributed to the use beyond the specifications is not guaranteed.
2. There is a possibility of dangerous sudden action by the product if sliding parts of machinery are twisted due to external forces etc. In such cases, human injury may occur, such as by catching hands or feet in the machinery, or damage to the machinery itself may occur. Design the machinery should be designed to avoid such dangers.
3. A protective cover is recommended to minimize the risk of personal injury. If a driven object and moving parts of the product are in close proximity, personal injury may occur. Design the system to avoid contact with the human body.
4. Securely tighten all stationary parts and connected parts so that they will not become loose. When the product operates with high frequency or is installed where there is a lot of vibration, ensure that all parts remain secure.
5. Consider a possible loss of power source. Take measures to prevent injury and equipment damage even in the case of a power source failure.
6. Consider behavior of emergency stop of whole system. Design the system so that human injury and/or damage to machinery and equipment will not be caused, when it is stopped by a safety device for abnormal conditions such as a power outage or a manual emergency stop of whole system.
7. Consider the action when operation is restarted after an emergency stop or abnormal stop of whole system. Design the system so that human injury or equipment damage will not occur upon restart of operation of whole system.
8. Never disassemble or modify (including additional machining) the product. An injury ro failure can result. It will cause the loss of the product performance.
9. Do not use the stop signal, "EMG" of the controller and stop switch on the teaching box as the emergency stop of system. The stop signal, "EMG" of controller and the stop switch on the teaching box are for decelerating and stopping the actuator. Design the system with an emergency stop circuit which is applied relevant safety standard separately.
10. When using it for vertical application, it is necessary to build in a safety device. The table may fall due to the weight of work. The safety device should not interfere with normal operation of the machine.
Caution 1. Operate within the limits of the maximum usable stoke.
The product will be damaged if it is used with the stroke which is over the maximum stroke. Refer to the specifications of the product.
2. When the product repeatedly cycles with partial strokes, operate it at a full stroke at least once a day or every 1000 strokes. Otherwise, lubrication can run out.

- 39 -
3. Do not use the product in applications where excessive external force or impact force is applied to it. The product can be damaged. Each component that includes motor is made with accurate tolerance. So even slightly deformed or miss-alignment of component may lead operation failure of the product.
4. Returning to origin cannot be done during the operation. It cannot be done during positioning operation, pushing operation and pushing. 5. Refer to a common auto switch /matter (Best Pneumatics No 2) when an auto switch is built in
and used. 6. When conformity to UL is required, the electric actuator and controller should be used with a
UL1310 Class 2 power supply. 5.2 Mounting
Warning 1. Install and operate the product only after reading the Operation Manual carefully and
understanding its contents. 2. Observe the tightening torque for screws.
Unless stated otherwise, tighten the screws to the recommended torque for mounting the product. 3. Do not make any alterations to this product.
Alterations made to this product may lead to a loss of durability and damage to the product, which can lead to human injury and damage to other equipment and machinery.
4. When using external guide, the guide axis should be parallel to the actuator axis. There will be damage/excessive wear on the lead screw if the external guide is not parallel.
5. When an external guide is used, connect the moving parts of the product and the load in such a way that there is no interference at any point within the stroke. Do not scratch or dent the sliding parts of the product tube or piston rod etc., by striking or grasping them with other objects. Components are manufactured to precise tolerances, so that even a slight deformation may cause faulty operation.
6. Prevent the seizure of rotating parts. Prevent the seizure of rotating parts (pins, etc.) by applying grease.
7. Do not use the product until you verify that the equipment can operate properly. After mounting or repair, connect the power supply to the product and perform appropriate functional inspections to check it is mounted properly.
8. Cantilever When the actuator is operated at high speed while it is fixed at one end and free at the other end (flange type, foot type, double clevis type, direct mount type), a bending moment may act on the actuator due to vibration generated at the stroke end, which can damage the actuator. In such a case, install a support bracket to suppress the vibration of the actuator body or reduce the speed so that the actuator does not vibrate. Use a support bracket also when moving the actuator body or when a long stroke actuator is mounted horizontally and fixed at one end.
9. When mounting the actuator or attaching to the work piece, do not apply strong impact or large moment. If an external force over the allowable moment is applied, it may cause looseness in the guide unit, an increase in sliding resistance or other problems.
10. Maintenance space Allow sufficient space for maintenance and inspection.

- 40 -
5.3 Handling Warning
1. Do not touch the motor in operation. The surface temperature of the motor can increase to approx. 80oC due to operating conditions. This temperature increase may also be caused by energizing alone. As it may cause burns, do not touch the motor when in operation.
2. If abnormal heating, smoking or fire, etc., occurs in the product, immediately shut off the power supply.
3. Immediately stop operation if abnormal operation noise or vibration occurs. If abnormal operation noise or vibration occurs, the product may have been mounted incorrectly. Unless operation of the product is stopped for inspection, the product can be seriously damaged.
4. Never touch the rotating part of the motor while in operation. 5. When installing, adjusting, inspecting or performing maintenance on the product, controller and related
equipment, be sure to shut off the power supply to them. Then, lock it so that no one other than the person working can turn the power on, or implement measures such as a safety plug.
6. In the case of the actuator that has a servo motor (24VDC), the “motor phase detection step" is done by inputting the servo on signal just after the controller power is turned on. The “motor phase detection step” moves the table/rod for the distance of the one screw-lead as the maximum. (The motor rotates in the reverse direction if the table hits an obstacle such as the end stop damper.) Take the “motor phase detection step” into consideration for the installation and operation of this actuator.
Caution 1. Keep the controller and product combined as delivered for use.
The product is set in parameters for shipment. If it is combined with a different parameter, failure can result. 2. Check the product for the following points before operation.
a) Damage to power supply line and signal line. b) Looseness of the connector to each power line and signal line. c) Looseness of the actuator /cylinder and controller /driver mounting d) Abnormal operation e) Emergency stop of the total system
3. When more than one person is performing work, decide on the procedures, signals, measures and resolution for abnormal conditions before beginning the work. Also, designate a person to supervise work other than those performing work.
4. Actual speed of the product will be changed by the workload. Before selecting a product, check the catalog for the instructions regarding selection and specifications.
5. Do not apply a load, impact or resistance in addition to a transferred load during return to origin. In the case of the return to origin by pushing force, additional force will cause displacement of the origin position since it is based on detected motor torque.
6. Do not remove the nameplate. 7. Operation test should be done by low speed. Start operation by predefined speed after
confirming there is no trouble. [Earth]
Warning 1. Please give the earth to the actuator.

- 41 -
2. Please make it to the earth of exclusive use. The earth construction is D seed. (Below earth resistance 100Ω)
3. Please shorten the distance until the actuator and earth. [Unpackaging]
Caution 1. Check the received product is as ordered.
If the different product is installed from the one ordered, injury or damage can result. 5.4 Operating environment
Warning 1. Avoid use in the following environments.
a. Locations where a large amount of dusts and cutting chips are airborne. b. Locations where the ambient temperature is outside the range of the temperature specification (refer
to specifications). c. Locations where the ambient humidity is outside the range of the humidity specification (refer to
specifications). d. Locations where corrosive gas, flammable gas, sea water, water and steam are present. e. Locations where strong magnetic or electric fields are generated. f. Locations where direct vibration or impact is applied to the product. g. Areas that are dusty, or are exposed to splashes of water and oil drops. h. Areas exposed to direct sunlight (ultraviolet ray).
2. Do not use in an environment where the product is directly exposed to liquid, such as cutting oils. If cutting oils, coolant or oil mist contaminates the product, failure or increased sliding resistance can result.
3. Install a protective cover when the product is used in an environment directly exposed to foreign matters such as dust, cutting chips and spatter. Play or increased sliding resistance can result.
4. Shade the sunlight in the place where the product is applied with direct sunshine. 5. Shield the product if there is a heat source nearby.
When there is a heat source surrounding the product, the radiated heat from the heat source can increase the temperature of the product beyond the operating temperature range. Protect it with a cover, etc.
6. Grease oil can be decreased due to external environment and operating conditions, and it deteriorates lubrication performance to shorten the life of the product.
[Storage]
Warning 1. Do not store the product in a place in direct contact with rain or water drops or is exposed to
harmful gas or liquid. 2. Store in an area that is shaded from direct sunlight and has a temperature and humidity within
the specified range (-10°C to 60°C and 90%RH or less No condensation or freezing). 3. Do not apply vibration and impact to the product during storage. 5.5 Maintenance
Warning 1. Do not disassemble or repair the product.
Fire or electric shock can result. Contact SMC, in case of disassembly for the maintenance. 2. Before modifying or checking the wiring, the voltage should be checked with a tester 5 minutes
after the power supply is turned off.

- 42 -
Electrical shock can result.
Caution 1. Maintenance should be performed according to the procedure indicated in the Operating
Manual. Improper handling can cause an injury, damage or malfunction of equipment and machinery.
2. Removal of product When equipment is serviced, first confirm that measures are in place to prevent dropping of work pieces and run-away of equipment, etc, and then cut the power supply to the system. When machinery is restarted, check that operation is normal with actuators in the proper positions.
[Lubrication] Caution
1. The product has been lubricated for life at manufacturer, and does not require lubrication in service.
When lubrication is applied, special grease must be used. / See “2.3 Construction” on p.14-17 / See “6.5 How to spreading grease” on p.51
5.6 Precautions for actuator with lock Warning
1. Do not use the lock as a safety lock or a control that requires a locking force. The lock used for the product with a lock is designed to prevent dropping of work piece.
2. For vertical mounting, use the product with a lock. If the product is not equipped with a lock, the product will move and drop the work piece when the power is removed.
3. "Measures against drops” means preventing a work piece from dropping due to its weight when the product operation is stopped and the power supply is turned off.
4. Do not apply an impact load or strong vibration while the lock is activated. If an external impact load or strong vibration is applied to the product, the lock will lose it’s pushing force and damage to the sliding part of the lock or shortening of lifespan can result. The same situations will happen when the lock slips due to a force over the thurst of the product, as this accelerates the wear to the lock.
5. Do not apply liquid or oil and grease to the lock or its surrounding. When liquid or oil and grease are adhered to the sliding part of the lock, its holding force will reduce significantly. Or, lock sliding part performance and condition changes may be cause of lock release malfunction.
6. Take measures against drops and check that safety is assured before mounting, adjustment and inspection of the product. If the lock is released with the product mounted vertically, a work piece can drop due to its weight.
7. When the actuator is operated manually (when SVRE output signal is off), supply 24DCV to the [BK RLS] terminal of the power supply connector. If the product is operated without releasing the lock, wearing of the lock sliding surface will be accelerated, causing reduction in the holding force and the life of the locking mechanism.
8. Do not supply 24VDC power supply constantly to the [BK RLS(Lock release)] terminal. Stop supplying 24VDC power supply to the [BK RLS(Lock release) terminal during normal operation. If power is supplied to the [BK RLS] terminal continuously, the lock will be released, and workpieces may be dropped at stop (EMG).
/Refer to the operation manual of LEC (controller) for details of wiring.

- 43 -
6. Electric actuators / Common precautions 6.1 Design and selection
Warning 1. Do not apply a load in excess of the actuator specification.
A product should be selected based on the maximum pay load and allowable moment. If the product is used outside of the operating limit, eccentric load applied to the guide will become excessive and have adverse effects such as creating play at the guide, degraded accuracy and shortened product life.
2. Do not use the product in applications where excessive external force or impact force is applied to it. This can lead to premature failure of the product..
6.2 Handling Caution
1. INP output signal 1) Positioning operation
When the product comes within the set range by step data [In position], output signal will be turned on. Initial value: Set to [0.50] or higher.
2) Pushing operation When the pushing force exceeds the [TriggerLV] value the INP ( In position) output signal is turned on. Please set the [Pushing force] and the [TriggerLV] within the specified range. To ensure that the actuator pushes the workpiece by the inputted [pushing force], it is recommended that the [TriggerLV] is set to the same value as the [pushing force].
2. When pushsing operation, be sure to use in "pushing operation". Also, Never hit at the
stroke end. It causes the breakage and malfunction. The internal stopper can be broken.
3. The positioning force should be set to Step motor:100% / Servo motor:250%.
If the positioning force is set below Step motor:100% / Servo motor:250%, it can displace the tack time, which causes an alarm.
4. Actual speed of the product can be changed by load. When selecting a product, check the catalog for the instructions regarding selection and specifications.
5. Do not apply a load, impact or resistance in addition to a transferred load during return to origin.
Otherwise, the origin can be displaced since it is based on detected motor torque. 6. The table and guide block are made of special stainless. There can be rust on the product in an environment exposed to water drops. 7. Do not dent, scratch or cause other damage to the body and table mounting surfaces. It may cause a loss of parallelism in the mounting surfaces, looseness in the guide unit, an
increase in sliding resistance or other problems. 8. Do not dent, scratch or cause other damage to the surface over which the rail and guide
will move. increased sliding resistance and Play can result.
9. When attaching work piece, do not apply strong impact or large moment. If an external force over the allowable moment is applied, it may cause looseness in the guide unit, an increase in sliding resistance or other problems.
10. Keep the flatness of mounting surace 0.02mm or less. Insufficient flatness of a work piece or base mounted on the body of the product can cause play at
the guide and increased sliding resistance. Do not place work and do not transform the clamp face by a crowded installation etc.
×

- 44 -
11. Do not move the main body with the table fixed. 12. When mounting the product of LESH*R / LESH*L, keep the following value for bending the
fixing cable. When mounting the product of LESH*D, leave a gap of 40mm or more to allow for bending of the actuator cable.
13. When mounting the product, use screws with adequate length and tighten them to the
maximum torque or less. Tightening with higher torque than the specified range may cause malfunction while the tightening
with lower torque can cause the displacement of position or dropping a work piece.
Body fixed / Side mounting (body tapped)
Body fixed / Side mounting (through-hole)
Part no. BoltMax.tigtening torque
[Nm]l [mm]
(Max.thread depth)
LES□8R/L M4X0.7 1.5 8
LES□8D M5X0.8 3 10
LES16R/L M5X0.8 3 10
LES16DLESH16□
LES25R/L M6X1 5.2 12
LES25D
LESH25□
M6X1 5.2 12
M8X1.25 10 16
Part no. BoltMax.tigtening torque
[Nm]l [mm]
LES8R/L 23.5
LESH8R/L 25.5LES□8D M4X0.7 1.5 18.2
LES16R/L M4X0.7 1.5 33.5
LES16D 25.2
LESH16R/L 35.5
LESH16D 27.3
LES25R/L M5X0.8 3 49
LES25D 39.8
LESH25R/L 50.5
LESH25D 39.5
M3X0.5 0.63
M5X0.8 3
M6X1 5.2

- 45 -
Body fixed / Side mounting (Side holder)
When installing this product using side holders, use dowel pins for location product. If vibration or excessive external force is applied to the product, it can cause displacement of the product if dowel pins are not used.
14. In pushing operation, set the product to a position of at least 0.5mm away from a work piece.
If the product is set to the same position as a work piece, the following alarm and unstable operation can occur.
a. “Posn failed” alarm The product cannot reach a pushing start position due to the deviation of work pieces in
width. b. “Pushing ALM” alarm
The product is pushed back from a pushing start position after starting to push.
Work fixed / Front mounting
In order to prevent the work fixing bolt from hitting the table, use a bolt of a length at least 0.5mm shorter than the maximum thread depth. Longer bolts can hit the end plate, which will causes operation failure.
Work fixed / Top mounting
In order to prevent the work fixing bolt from hitting the guide block, use a bolt of a length at least 0.5mm shorter than the maximum thread depth. Longer bolts can hit the guide block, which causes operation failure.
l
Dowel pins
Part no. BoltMax.tigtening torque
[Nm]l [mm]
(Max.thread depth)
LES8R/L 6
LESH8R/L 5.5
LES□8D M4X0.7 1.5 8
LES16R/L M4X0.7 1.5
LES16D
LESH16□
LES25R/L 12
LESH25R/L 10
LES□25D 14
M3X0.5 0.63
8M5X0.8 3
M6X1 5.2
Part no. BoltMax.tigtening torque
[Nm]l [mm]
LES□8D M4X0.7 1.5 6.7
LES□16D M5X0.8 3 8.3
LES□25D M6X1 5.2 12
Part no. BoltMax.tigtening torque
[Nm]l [mm]
(Min/Max.thread depth)
LES8□ 2.1~4.1
LESH8□ 5(Max)
LES16□ M4X0.7 1.5 2.7~5.7
LESH16□ M5X0.8 3 6.5(Max)
LES25□ M5X0.8 3 3.3~7.3
LESH25□ M6X1 5.2 8(Max)
M3X0.5 0.63

- 46 -
15. Please decrease the transportation mass when the outside power hangs in the table. Please note might the increase of the sliding resistance of the table when the piping duct etc. are set up in
the actuator, and becoming a defective factor for operation enough.
16. When installing this product using side holders, they should be installed within the range of the dimensions shown below. Otherwise, the product will be in an unbalanced state, causing looseness.
17. Do not peel off, and grip the masking tape on the back of the body of LESH*D.
The masking tape peels off, and the foreign body might enter in the actuator.
18. When the table operates, the space can be done between actuator (figure below arrow part). Do not place the hand and the finger, etc. because it is dangerous and do not crowd.
19. When fixing this product using the through hole in the mounting orientations shown below, be
sure to use two side holders as shown in the figure below. Otherwise, the product will be in an unbalanced state, causing looseness.
5mm or less
型式 L(mm)
LES□8D□-30 5 ~ 10
LES□8D□-50 20 ~ 30
LES□8D□-75 50 ~ 60
LES□16D□-30 5 ~ 10
LES□16D□-50 20 ~ 30
LES□16D□-75 60 ~ 75
LES□16D□-100 85 ~ 100LES□25D□-30 5 ~ 15LES□25D□-50 25 ~ 35
LES□25D□-75 60 ~ 75
LES□25D□-100 70 ~ 100
LES□25D□-125 155 ~ 170
LES□25D□-150 160 ~ 180
Body fixed / Ceiling mounting (through-hole) 5mm or less
Body fixed / Wall mounting (through-hole)
5mm or less

- 47 -
20. The product should be mounted as shown below in the figures marked with the ○. Unstable mounting of the product may cause operation failure, generation of abnormal noise or increase in the deflection etc.
21. Even with the same product number, the table of some products can be moved by hand
and the table of some products cannot be moved by hand. However, there is no abnormality with these products. (Without lock) This difference is caused because there is a little variation with the positive efficiency (when the table is moved by the motor) and there is a large variation with the reverse-efficiency (when the table is moved manually) due to the product characteristics. There is hardly any difference among products when they are operated by the motor.
22. Remove the cap and operate manual override screw of LES**R/L with hex wrench.
○
○
×
×
Body fixed / Vertical mounting (through-hole)
5mm
or l
ess
Hex wrench
Cap

- 48 -
6.3 Precaution on maintenance Caution
1. Cut the power supply during maintenance and replacement of the product. 2. Put on protective goggles when applying grease.
[Maintenance frequency] Perform maintenance according to the table below.
Appearance check Check belt Inspection before daily operation ○ - Inspection every six months * - ○
Inspection every 250km * - ○ Inspection are every five million times * - ○
*Either of inspection early time is selected. [Items for visual appearance check] 1. Loose set screws, abnormal dirt. 2. Check of flaw and cable joint 3. Vibration, noise. [Items for belt check] ( LES**R / LES**L ) Stop operation immediately and replace the belt when belt appear to be like photos below. a. Tooth shape canvas is worn out
Canvas fiber becomes fuzzy. Rubber is removed and the fiber becomes whitish. Lines of fibers become unclear.
b. Peeling off or wearing of the side of the belt Belt corner becomes round and frayed thread sticks out.
c. Belt partially cut
Belt is partially cut. Foreign matter caught in teeth other than cut part causes flaw.
d. Vertical line of belt teeth Flaw which is made when the belt runs on the flange.
e. Rubber back of the belt is softened and sticky.
f. Crack on the back of the belt
Teeth become fuzzy

- 49 -
6.4 Replacement of belt ( LES**R / LES**L ) 1. Remove the resin cover at the end.
2. Displace the cover holding the cable. (If the cable is pulled forcefully, it will be disconnected)
3. Loosen the bolts fixing the motor. Do not remove the bolt completely to avoid loosing them.
4. Remove the belt
Bolt
Resin cover
Bolt

- 50 -
5. Hook a wire to the motor axis.
6. Set a new belt. Mount the motor pulley with belt tension force below.
7. With tensile force adjusted, tighten the bolts which fix the body to the motor.
8. Remove the wire, put the cover back.
9. Check the presence of noise and displacement by test operation.
Size Belt tension (N) LESH8 15 LESH16 32 LESH25 58
Size Tightening torque (Nm)
LESH8 0.36 LESH16 0.63 LESH25 1.50
Size Tightening torque (Nm)
LESH8 0.18 LESH16 0.36 LESH25 0.75
Caution (Gasket type) Ensure that gasket is properly in the groove.
Bolt

- 51 -
6.5 How to spreading grease Please follow the procedure below when applying grease. When lubrication is applied, special grease must be used. / See “2.3 Construction” on p.14-17 Extend the table to the full stroke as shown below. Using a scrap of cloth, wipe off any grease stuck to the parts indicated by arrows steel ball moving grooves. Next, spread grease evenly directly onto the parts indicated by arrows steel ball moving grooves using a spatula etc. (Guideline for amount of grease to be applied: 0.1g/ 100mm) After a short time perform return operation a few times and confirm that the grease is spread all over.
鋼球転送部
Ball Groove

- 52 -
7. Troubleshooting Alarms below are abstract of representative examples. For other alarms, see operation manual of controller. No. Phenomenon Cause Countermeasure 1 Fail to operate
/ Initial stage When power is supplied, alarm for “Phase Det ALM /code: 1-193” is generated.
↓ <Procedure of restart>
“Turn the power supply off.” ↓
“Turn the power supply on”
1) Cable is not connected, disconnected
Check if the cable is properly installed /See 4. Wiring of cable on p.37
2) Load /resistance out of spec, range are applied to the actuator constantly.
Keep load and resistance within specification range. /See 2.1 Specifications on p.9-12
3) Combination of the controller and actuator is not correct.
Combination at the time of shipment shall be kept.
/See 5.3 Caution (1) on p.40
4) The work that curves to the “End plate” is installation.
Keep the fiatness of mountingu surface 0.02mm or less.
/See 6.2 Caution (10) on p.43
5) The screw to fix work to the end plate is tightened too much.
It tightens by the decided torque. /See 6.2 Caution (13) on p.45
6) The bolt that is the fixation of work on the table presses the guide block.
Please use the bolt of appropriate length. /See 6.2 Caution (13) on p. 45
Alarm for “Step data ALM1 /code:1-048” is generated
↓ <Procedure of restart> Input the “reset signal.”
Set condition for step data is not correct.
< Correct set condition > (1)Area 1 < Area 2 (2)Pushing force or more Trigger
LV (3)Speed or more Pushing Speed (4)Pushing foreman or
more pushing force
Review the content of step data after releasing the alarm by [RESET]. / Refer to the LEC controller operation manual.
Alarm for “Servo off ALM /code: 1-098” is generated
↓ <Procedure of restart> Input the “reset signal.”
Perform the “Return to origin”, the positioning operation and JOG operation during the “SVON”: OFF.
Provide the operation instruction after confirming that the input signal [SVON] is ON and then the output signal [SVRE] is ON.
Alarm for “Drive ALM /code: 1-099” is generated.
↓ <Procedure of restart> Input the “reset signal.”
Perform positioning, pushing operation before retuning to origin.
Provide the operation instruction after confirming that the input signal [SETUP] is ON and then the output signal [SETON] is ON.

- 53 -
No. Phenomenon Cause Countermeasure
2 Operation not completed / Operation continue
“Posn failed/code: 1-149” is generated.
↓ <Procedure of restart>
Controller version /SV1.0 or later 1. Input the “reset signal.”
“SVRE”: Automatically ON Controller version /SV0.6* or before 1. Input the “reset signal.”
“SVRE”: Automatically ON 2. Input the “setup signal.”
Restart operation after the completion of the”retun to origin”.
1) The Power supply does not have sufficient capacity.
Check the power consumption for each actuator and controller: If necessary replace the existing power supply with a power supply with sufficient capacity. /See 2.1 Specifications on p.9-12
2) Load/resistance more than spe
cified range is being applied to the actuator.
Use within specification range. /See 2.1 Specifications on p.9-12
3) Pushing operation is preformed with
“Positioning operation”
Review the content of the step data. /See 3.3 Step data setting on p.22-32
4) For the “pushing operation”, the position (target start-pushing position) is not set correctly.
Check the step data. /See 3.3 Step data setting on p.22-32
5) Breaking of belt Please check the belt. /See 6.4 Replacement of belt on p.48-49
6) The cable is not connected or has been disconnected.
Confirm that the cable is connected correctly. /See 4. Wiring of cable on p.37
7) It was not the intended origin position because the actuator pinched the work-piece during the“return to origin”.
Remove the work-piece and restart the return to the intended origin position.
8) Wrong input [0] is input as the positioning force.
Check the step data. <Moving force> /See 3.3 Step data setting on p.22-32
9) The step data position is not changed correctly after the return to origin direction is changed.
Check the step data. <Position> /See 3.3 Step data setting on p.22-32
10) Because the operation of the step data is set to [INC/relative], the table comes into contact with an external object and does not move due to continuous operation.
(Stroke end etc.)
Check the step data. <Position> /See 3.3 Step data setting on p.22-32
Label position for controller version
Position : Bottom SV1.0*

- 54 -
No. Phenomenon Cause Countermeasure 2 Operation not completed
/ Operation continue Alarm for “Stroke limit/code: 1-052” is generated.
↓ <Procedure of restart>
Input the “RESET” signal.
Moving distance exceeds the “Stroke(+)” / “Stroke(-).
(Stroke end etc.)
Check the value of the “Position” of step data and the value of the “Stroke(+)” / “Stroke(-)” of the basic parameter. /See 3.3 Step data setting on p.22-32
3.4 Parameter setting on p.33-36 /Refer to the LEC controller operation manual.
Alarm for “Pushing ALM /code: 1-096” is generated.
↓ <Procedure of restart>
Input the “RESET” signal.
1) For the pushing operation, the position, target start-pushing position, is not set correctly.
Check the step data. /See 3.3 Step data setting on p.22-32
2) It was not the intended origin position because the actuator pinched the work-piece during the“return to origin”.
Remove the work-piece and restart the return to the intended origin position.
Operation is not completed / Operation continue
Alarm for “Over motor Vol /code: 1-145” is generated.
↓ <Procedure of restart>
Controller version /SV1.0 or later 1. Input the “reset signal.”
“SVRE”: Automatically ON Controller version /SV0.6* or before 1. Input the “reset signal.”
“SVRE”: Automatically ON 2. Input the “setup signal.”
Restart operation after the completion of the”retun to origin”.
1) If the power supply is an “inrush-current restraining type”, the alarm may be generated due to voltage drop.
Replace the power supply with a non “inrush-current restraining type” power supply. /Refer to the LEC controller operation manual.
2) The Power supply does not have sufficient capacity.
Check the power consumption for each actuator and controller: If necessary replace the existing power supply with a power supply with sufficient capacity. /See 2.1 Specifications on p.9-12
Label position for controller version
Position : Bottom SV1.0*

- 55 -
No. Phenomenon Cause Countermeasure 2 Alarm for “Over load/code: 1-148”
is generated. ↓
<Procedure of restart> Controller version /SV1.0 or later 1. Input the “reset signal.”
“SVRE”: Automatically ON Controller version /SV0.6* or before 1. Input the “reset signal.”
“SVRE”: Automatically ON 2. Input the “setup signal.”
Restart operation after the completion of the”retun to origin”.
Load /resistance out of spec, range are applied to the actuator constantly.
Keep load and resistance within specification range. /See 2.1 Specifications on p.9-12
Label position for controller version
Position : Bottom SV1.0*

- 56 -
No. Phenomenon Cause Countermeasure 2 Alarm for “ Err overflow
/code: 1-196” is generated.
↓ <Procedure of restart>
“Turn the power supply off.” ↓
“Turn the power supply on”
1) The lead screw had galling due to excessive external force (including vibration) or impact.
Operate within the specified range. /See 2.1 Specifications on p.9-12
2) The Power supply does not have sufficient capacity.
Check the power consumption for each actuator and controller: If necessary replace the existing power supply with a power supply with sufficient capacity. /See 2.1 Specifications on p.9-12
3) Load/resistance more than specified range is being applied to the actuator.
Use within specification range. /See 2.1 Specifications on p.9-12
4) The Pushing operation is performed at the “Positioning operation position
Review the content of the step data. /See 3.3 Step data setting on p.22-32
5) For the Pushing operation: The position (the target start
pushing position) is not set correctly.
Check the step data. /See 3.3 Step data setting on p.22-32
6) The cable is not connected or has been disconnected.
Comfirm that the cable is connected correctly. /See 4. Wiring of cable on p.37
7) It was not the intended origin position because the actuator pinched the work-piece during the“return to origin”.
Remove the work-piece and restart the return to the intended origin position.
8) Wrong input [0] is input as the positioning force.
Check the step data. <Moving force> /See 3.3 Step data setting on p.22-32
9) The step data position is not changed correctly after the return to origin direction is changed.
Check the step data. <Position> /See 3.3 Step data setting on p.22-32
10) Because the operation of the step data is set to [INC/relative], the table comes into contact with an external object and does not move due to continuous operation.
(Stroke end etc.)
Check the step data. <Position> /See 3.3 Step data setting on p.22-32

- 57 -
No. Phenomenon Cause Countermeasure 2 Operation not completed
/ During operation (Not always, but may happen occasionally)
Alarm for “Step data ALM2
/code: 1-051” is generated. ↓
<Procedure of restart> Input the “RESET” signal.
1) Command invalid (unregistered) step data.
Check if the step data is valid (registered).
2) Different input signal to the expected step number is inputted to the controller, because of a too short an interval between the input signal of “IN*” and the “Drive” or inputting the signals at the same time.
Add an interval of 15ms (the recommendation is 30ms) or more between the input signals. / See “Operating procedure input and output signals for each operation type” on P.31-32
3) Different input signal to the expected step number is inputted to the controller, because the input signal time was too short.
Maintain the state of the input signal for 15ms (the recommendation is 30ms) or more. / See “Operating procedure input and output signals for each operation type” on P.31-32
4) Different input signal to the
expected step number is inputted to the controller, caused by PLC or other device.
Check that the step number is inputted correctly for the required motion.
Operation completed by unexpected motion.
- No alarm / During operation (Not always, but may happen occasionally)
1) Different input signal to the expected step number is inputted to the controller, because of a too short an interval between the input signal of the “IN*” and the “Drive” or inputting the signals at the same time.
Add an interval of 15ms (the recommendation is 30ms) or more between the input signals. / See “Operating procedure input and output signals for each operation type” on P.31-32 Note) Recommend to check the
“OUT” output signal for more secure operation.
2) Different input signal to the
expected step number is inputted to the controller, because the input signal time was too short.
Maintain the state of the input signal for 15ms (the recommendation is 30ms) or more. / See “Operating procedure input and output signals for each operation type” on P.31-32 Note) Recommend to check the
“OUT” output signal for more secure operation.
3) Different input signal to the
expected step number is inputted to the controller, caused by PLC or other device.
Check that the step number is inputted correctly for the required motion. / See “Operating procedure input and output signals for each operation type” on P.31-32 Note) Recommend to check the
“OUT” output signal for more secure operation.

- 58 -
No. Phenomenon Cause Countermeasure 3
"Output signal" unstable the "INP output signal" turns "ON" before pushing the work piece.
The setting distance of the "[In pos]" is shorter than the distance which is from the pushing start point to the target pushing object.
Please set it as the following. "[In pos]"≧Distance to the target pushing object. /See 6.2 Caution (14) on p.45
During pushing operation, the "INP" output signal is ON before pushing
1) The "INP" output signal is turned “ON” because the effective pushing force of pushing operation exceeds the Trigger LV value.
Check the”pushing control selection” in the catalogue, and confirm whether the pushing force is within the range of each actuator. /See 2.1 Specifications on p.9-12
“INP” output signal is unstable. “ INP” output signal is unstable even after the positioning operation is completed.
1) The value of [In position] in step data is too small
Increase [In position] value as the following. ( [0.5] or more ) /See 6.2 Caution (1) on p.43
4 Positioning repeatability is out of specified range.
1) It shifts to the next operation by receiving the "INP" output signal.
Go to the next operation after confirming the “BUSY” output signal is outputted.
2) The belt is loosened. Readjust belt tension to the
appropriated value. /See 6.4 Replacement of belt on p.49-50
5 Damage 1) Abnormal external force Generation of interference of mechanism, eccentric load, excess load lead to cause deformation and damage of the actuator. Eliminate these
6 When mounted vertically, repeatedly shakes up and down when stopped.
1) A load exceeding the load is mounted.
Use within specification range. /See 2.1 Specifications on p.9-12

- 59 -
No. Phenomenon Cause Countermeasure
7 Cannot be actuated manually or by manual override adjustment screw (does not operate). (At stop(EMG) or
SVRE[OFF])
1)Contacts the stroke end of the actuator or the workpiece.
Check the stroke position and how workpieces are mounted.
2) [Lock type] is selected Supply 24VDC power supply to the [BK RLS] terminal of controller/CN1 power supply plug in order to unlock. /see 5.6 Precautions for the actuator with lock Warning(7) on p.42
Lock type is selected, but workpieces are dropped during stopping(EMG) or SVRE[OFF], or moved by external force.
1) Load exceeding the maximum work load is mounted, or external force more than the lock holding force is applied.
Check the mounted load and lock holding force to confirm if they are within the operation range. /See 2.1 Specifications on p.9-12
2) 24VDC is supplied to "BK RLS" terminal of controller/CN1 power supply connector.
Stop supplying 24VDC power supply to the [BK RLS] terminal /see 5.6 Precautions for the actuator with lock Warning(8) on p.42
8 Alarm for “ Stroke limit /code: 1-052” is generated.
↓ <Procedure of restart>
Input the “RESET” signal.
The actuator goes out the stroke limit specified by the basic parameters, “Stroke (+)” and “Stroke (-)” if it performs the requested operation. (Including JOG operation after return to origin)
Make sure that the basic parameter, “Stroke (+)” and “Stroke (-)” are consistent with the distance of actuator movement specified in the step data. / See “3.4 Parameter setting” on P.33-36

- 60 -
Revision history NO.LES-OM00214 Mar/ 2016 Revision 1) Controller addition
4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021 JAPAN Tel: + 81 3 5207 8249 Fax: +81 3 5298 5362 URL http://www.smcworld.com Note: Specifications are subject to change without prior notice and any obligation on the part of the manufacturer.
© 2012 SMC Corporation All Rights Reserved