faster-than-real-time dynamic simulation of ac/dc grids
TRANSCRIPT
Faster-Than-Real-Time Dynamic Simulation of AC/DC Grids
Supervisor: Dr. Venkata Dinavahi
RTX-LAB
Department of Electrical & Computer Engineering
University of Alberta
Sep. 13, 2021
Shiqi Cao

Outline
Background
• Transient Stability Problem
• Traditional Solution Methodology
• Recent Research Background
Current Research Progress
• Faster-Than-Real-Time Dynamic Simulation of AC/DC Grids on Reconfigurable Hardware
• Flexible time-stepping dynamic emulation of AC/DC grid for faster-than-SCADA applications
Conclusions
2

Transient Stability Problem
3
• The power system dynamic simulation for transient stability analysis is basically solving the following set of differential algebraic equations (DAEs):
ሶ𝒙 = f(x, u, t), (1)
➢Network Equations:
g(x, u, t) = 0. (2)
➢ Initial Conditions:
𝒙𝟎 = 𝒙 𝑡0 , (3)
Background Current Research Progress Conclusion

Traditional Solution Methodology
4
• Discretization:
➢ Integration method (e.g., trapezoidal rule)
𝑭 𝒛 =∆𝑡
2𝒇 𝒙, 𝒖, 𝑡 + 𝒇 𝒙, 𝒖, 𝑡 + ∆𝑡 − 𝒙 𝑡 + ∆𝑡 − 𝒙 𝑡 , (4)
• Linearized:
➢ Iterative method (e.g., Newton-Raphson)
𝑱 𝒛𝒊 ∙ Δ𝒛 = −𝑭(𝒛𝒊) (5)
• Solving Linear Algebraic Equations:
➢LU decomposition
➢Gauss elimination
• Update
➢Jacobian matrix
➢State variables
Background Current Research Progress Conclusion

Recent Research Background
5
• Developing new parallel numerical integration algorithms:
➢Parallel-in-time
➢Parallel-in-space
• Utilizing high-performance computation platforms:
➢Supercomputers
➢Multiprocessors
➢GPUs
Background Current Research Progress Conclusion

AC/DC Grid Modeling
6
Faster-Than-Real-Time Dynamic Simulation of AC/DC Grids on Reconfigurable Hardware
AC Grid Modeling
• Synchronous Machine Model
➢Rotor mechanical equations:
ሶ𝛿 𝑡 = 𝜔𝑅 ∙ Δ𝜔 𝑡 ,
ሶΔ𝜔(𝑡) =1
2𝐻𝑇𝑒 + 𝑇𝑚 − 𝐷 ∙ Δ𝜔 𝑡 , (10)
➢Rotor electrical equations:
ሶ𝜓𝑓𝑑(𝑡) = 𝜔𝑅 ∙ 𝑒𝑓𝑑 𝑡 − 𝑅𝑓𝑑𝑖𝑓𝑑 𝑡 ,
ሶ𝜓1𝑑(𝑡) = −𝜔𝑅 ∙ 𝑅1𝑑𝑖1𝑑(𝑡),
ሶ𝜓1𝑞(𝑡) = −𝜔𝑅 ∙ 𝑅1𝑞𝑖1𝑞(𝑡),
ሶ𝜓2𝑞(𝑡) = −𝜔𝑅 ∙ 𝑅2𝑞𝑖2𝑞(𝑡), (11)
[1] S. Cao, N. Lin, and V. Dinavahi, “Faster-than-real-time dynamic simulation of AC/DC grids on reconfigurable hardware,” IEEE Transactions on Power Systems, vol. 35, no. 2, pp. 1539–1548,
Mar. 2020.
Background Current Research Progress Conclusion
AC/DC Grid Modeling
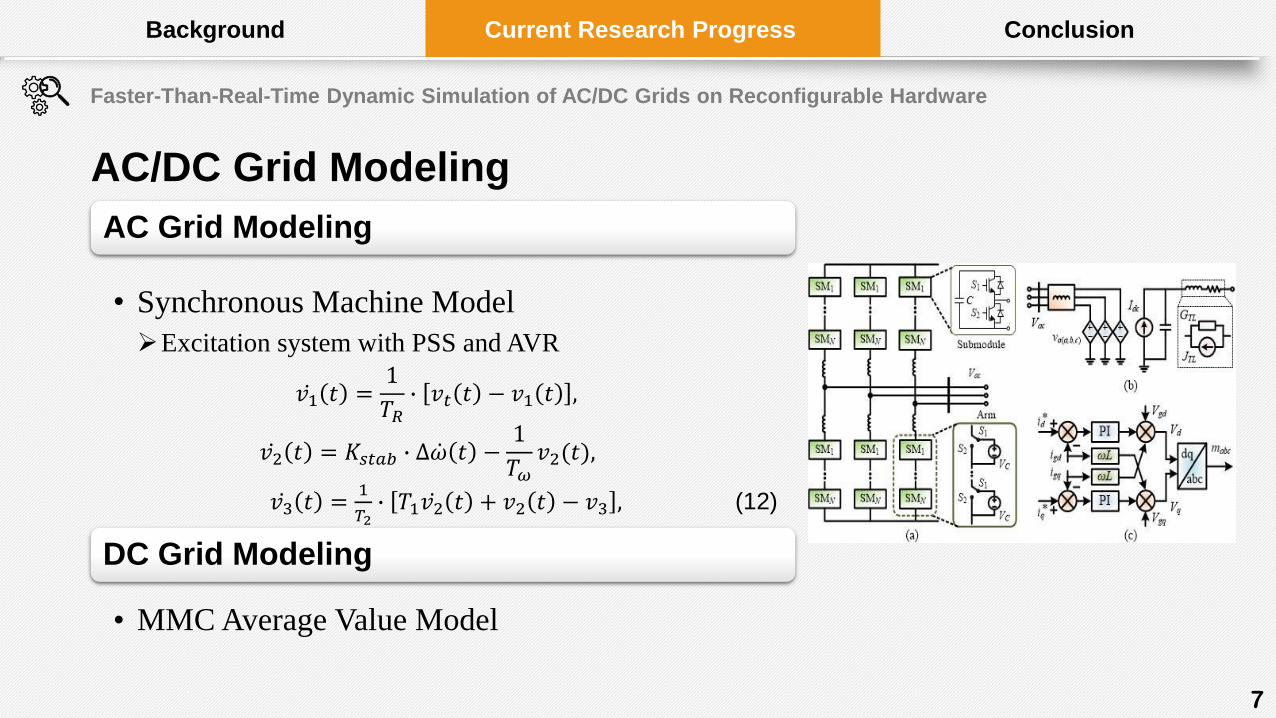
AC Grid Modeling
• Synchronous Machine Model
➢Excitation system with PSS and AVR
ሶ𝑣1 𝑡 =1
𝑇𝑅∙ 𝑣𝑡 𝑡 − 𝑣1 𝑡 ,
ሶ𝑣2 𝑡 = 𝐾𝑠𝑡𝑎𝑏 ∙ Δ ሶ𝜔 𝑡 −1
𝑇𝜔𝑣2(𝑡),
ሶ𝑣3 𝑡 =1
𝑇2∙ 𝑇1 ሶ𝑣2 𝑡 + 𝑣2 𝑡 − 𝑣3 , (12)
DC Grid Modeling
• MMC Average Value Model
7
Faster-Than-Real-Time Dynamic Simulation of AC/DC Grids on Reconfigurable Hardware
Background Current Research Progress Conclusion
AC/DC Grid Modeling
8
Faster-Than-Real-Time Dynamic Simulation of AC/DC Grids on Reconfigurable Hardware
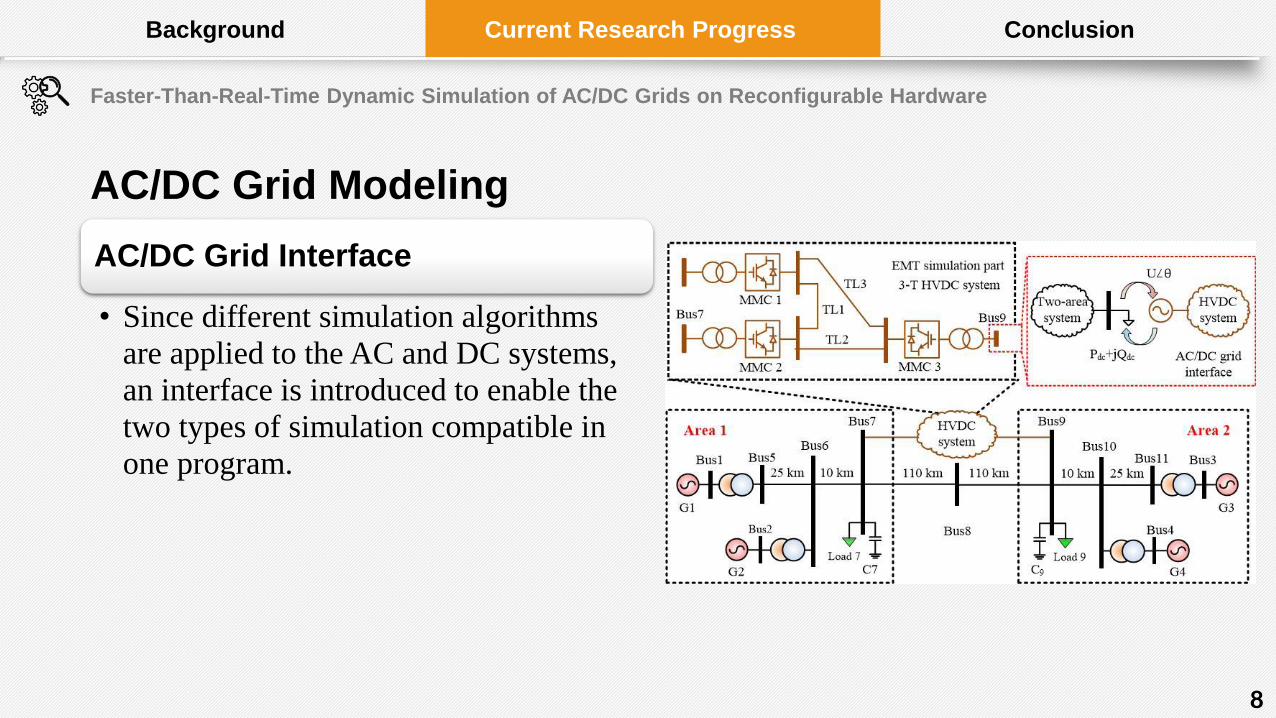
AC/DC Grid Interface
• Since different simulation algorithms
are applied to the AC and DC systems,
an interface is introduced to enable the
two types of simulation compatible in
one program.
Background Current Research Progress Conclusion

Proposed Fine-Grained Relaxation Algorithm
9
Faster-Than-Real-Time Dynamic Simulation of AC/DC Grids on Reconfigurable Hardware
• 9th-order synchronous machine:∆𝑥1
𝑛+1
∆𝑥2𝑛+1
∆𝑥3𝑛+1
⋮∆𝑥9
𝑛+1
=
𝐽11𝑛 𝐽12
𝑛 𝐽13𝑛
𝐽21𝑛 𝐽22
𝑛 𝐽23𝑛
𝐽31𝑛 𝐽32
𝑛 𝐽33𝑛
⋯⋯⋯
𝐽19𝑛
𝐽29𝑛
𝐽39𝑛
⋮ ⋮ ⋮ ⋱ ⋮𝐽91𝑛 𝐽92
𝑛 𝐽93𝑛 ⋯ 𝐽99
𝑛
−1−𝑓1
𝑛
−𝑓2𝑛
−𝑓3𝑛
⋮−𝑓9
𝑛
(6)
where the superscription n denotes the iteration index.• A random Δ𝑥𝑖 can be derived in the following equations:
𝐽11𝑛 Δ𝑥1
𝑛+1 + 𝐽12𝑛 Δ𝑥2
𝑛+1 + 𝐽13𝑛 Δ𝑥3
𝑛+1 +⋯+ 𝐽19𝑛 Δ𝑥9
𝑛+1 = −𝑓1𝑛
𝐽21𝑛 Δ𝑥1
𝑛+1 + 𝐽22𝑛 Δ𝑥2
𝑛+1 + 𝐽23𝑛 Δ𝑥3
𝑛+1 +⋯+ 𝐽29𝑛 Δ𝑥9
𝑛+1 = −𝑓2𝑛
⋮ ⋮ ⋮
𝐽91𝑛 Δ𝑥1
𝑛+1 + 𝐽92𝑛 Δ𝑥2
𝑛+1 + 𝐽93𝑛 Δ𝑥3
𝑛+1 +⋯+ 𝐽99𝑛 Δ𝑥9
𝑛+1 = −𝑓9𝑛 (7)
Δ𝑥𝑖𝑛+1=
−𝑓𝑖𝑛−σ𝑗≠𝑖
𝑗=1−9𝐽𝑖𝑗
𝑛Δ𝑥𝑗𝑛+1
𝐽𝑖𝑖𝑛 (8)
Approximate: Δ𝑥𝑖𝑛+1=
−𝑓𝑖𝑛−σ𝑗≠𝑖
𝑗=1−9𝐽𝑖𝑗
𝑛Δ𝑥𝑗𝑛
𝐽𝑖𝑖𝑛 (9)
Background Current Research Progress Conclusion

• The emulation of integrated AC/DC grids is conducted on the Xilinx Virtex® UltraScaleTM XCVU9P FPGA board.
Hardware Emulation on FPGA
10
Faster-Than-Real-Time Dynamic Simulation of AC/DC Grids on Reconfigurable Hardware
Background Current Research Progress Conclusion

• Specifics of major AC/DC grid hardware modules:
➢The DC grid parts are fully parallelized with the largest latency of 90 Tclk, under an FPGA clock latency of 10 ns, the FTRT ratio is over 200𝜇𝑠
90×10𝑛𝑠≈ 222.
➢With a maximum FGRA iteration of 11, the estimated overall latency of the dynamic simulation is (32+394+98+35)*11+1313=7462 clock cycles. With a time-step of 10 ms, FTRT
ratio reaches over 10𝑚𝑠
7462×10𝑛𝑠≈ 134.
Hardware Emulation on FPGA
11
Faster-Than-Real-Time Dynamic Simulation of AC/DC Grids on Reconfigurable Hardware
Background Current Research Progress Conclusion
FTRT Emulation Results and Validation
12
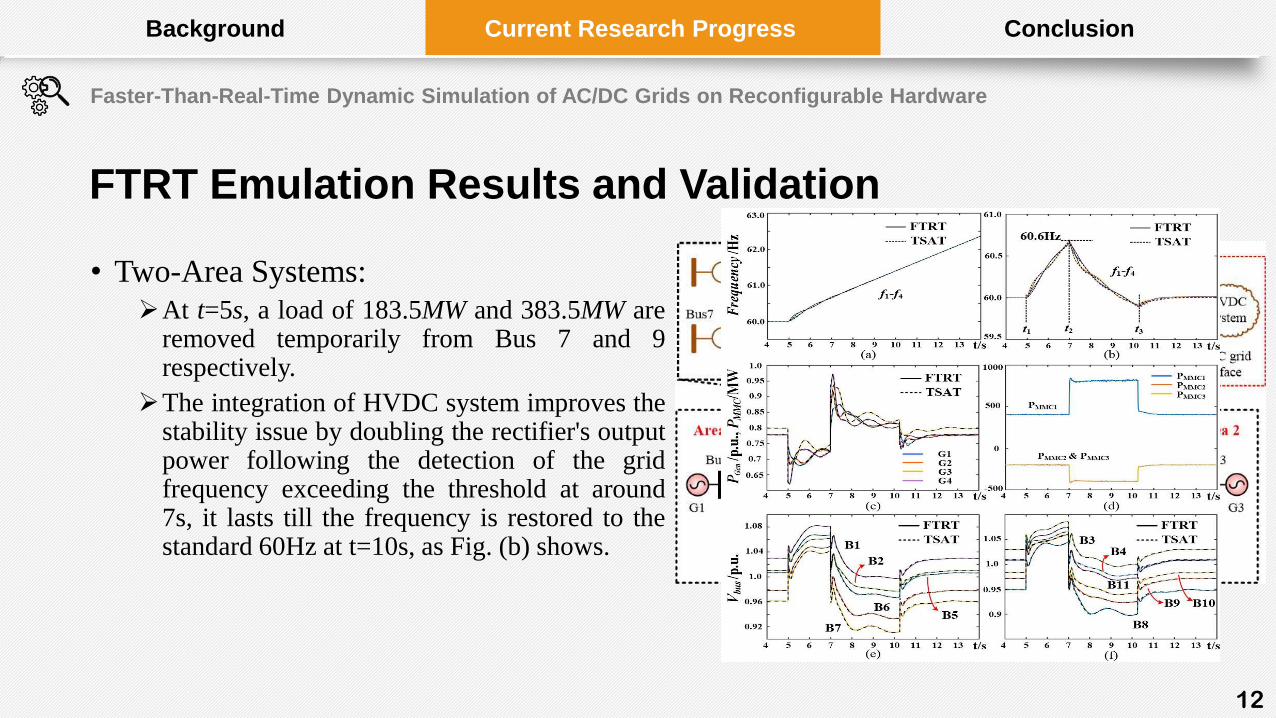
• Two-Area Systems:
➢At t=5s, a load of 183.5MW and 383.5MW areremoved temporarily from Bus 7 and 9respectively.
➢The integration of HVDC system improves thestability issue by doubling the rectifier's outputpower following the detection of the gridfrequency exceeding the threshold at around7s, it lasts till the frequency is restored to thestandard 60Hz at t=10s, as Fig. (b) shows.
Faster-Than-Real-Time Dynamic Simulation of AC/DC Grids on Reconfigurable Hardware
Background Current Research Progress Conclusion

FTRT Emulation Results and Validation
13
• Large scale AC/DC grid:
➢Three-phase-to-ground fault
Faster-Than-Real-Time Dynamic Simulation of AC/DC Grids on Reconfigurable Hardware
Background Current Research Progress Conclusion

14
FTRT Emulation Results and Validation
Faster-Than-Real-Time Dynamic Simulation of AC/DC Grids on Reconfigurable Hardware
• Large scale AC/DC grid:
➢ Inter-area oscillation
• Results on oscilloscope:
Background Current Research Progress Conclusion

Proposed Flexible Time-Stepping Algorithm
15
Flexible Time-Stepping Dynamic Emulation of AC/DC Grid for Faster-Than-SCADA Applications
➢4th-order Runge-Kutta:
𝑅𝐾1 = 𝑑𝑡 ∙ 𝑓 𝑡𝑛, 𝑥𝑛 ,
𝑅𝐾2 = 𝑑𝑡 ∙ 𝑓 𝑡𝑛 +𝑑𝑡
2, 𝑥𝑛 +
𝑅𝐾1
2,
𝑅𝐾3 = 𝑑𝑡 ∙ 𝑓 𝑡𝑛 +𝑑𝑡
2, 𝑥𝑛 +
𝑅𝐾2
2,
𝑅𝐾4 = 𝑑𝑡 ∙ 𝑓 𝑡𝑛 + 𝑑𝑡, 𝑥𝑛 + 𝑅𝐾3 ,
𝑥𝑛+1 = 𝑥𝑛 +1
6𝑅𝐾1 + 2𝑅𝐾2 + 2𝑅𝐾3 + 𝑅𝐾4 . (1)
➢Local truncation error (LTE)
𝐿𝑇𝐸 = 𝑥 𝑡𝑛+1 − 𝑥𝑛+1. (2)
➢ LTE-based flexible time-stepping:• 5th-order Adams-Bashforth (AB5)
ҧ𝑥𝑛+1 = 𝑥𝑛 +𝑑𝑡
7201901𝐹𝑛 − 2774𝐹𝑛−1 + 2616𝐹𝑛−2 − 1274𝐹𝑛−3 + 251𝐹𝑛−4 , (3)
where ҧ𝑥𝑛+1 can be treated as the exact values.
• As the exact values are solved from AB5, the adaptive time-step (෪𝑑𝑡) can be obtained as:
෪𝑑𝑡 =6 ҧ𝑥𝑛+1−𝑥𝑛+1 𝑑𝑡
(𝑅𝐾1+2𝑅𝐾2+2𝑅𝐾3+𝑅𝐾4)(4)
[2] S. Cao, N. Lin, and V. Dinavahi, “Flexible time-stepping dynamic emulation of AC/DC grid for faster-than-SCADA applications ,” IEEE Trans. Power Syst., vol. 36, no. 3,
pp. 2674–2683, May 2021.
Background Current Research Progress Conclusion

Proposed Flexible Time-Stepping Algorithm
16
Flexible Time-Stepping Dynamic Emulation of AC/DC Grid for Faster-Than-SCADA Applications
➢Event-based flexible time-stepping (FTS):
This algorithm is relative to the contingencies taking place in the system. After a serious disturbance,
the synchronous generators may lose synchronism, resulting in a rapid change of output voltages and
generator rotor angles. Therefore, the rate of change voltage and rotor angle (𝑑𝑣/𝑑𝑡, 𝑑𝛿/𝑑𝑡) can be
treated as the main time-step control indices.
➢ Proposed local equipment based flexible time-stepping
Fig. 1
Background Current Research Progress Conclusion
AC/DC Grid Modeling
17
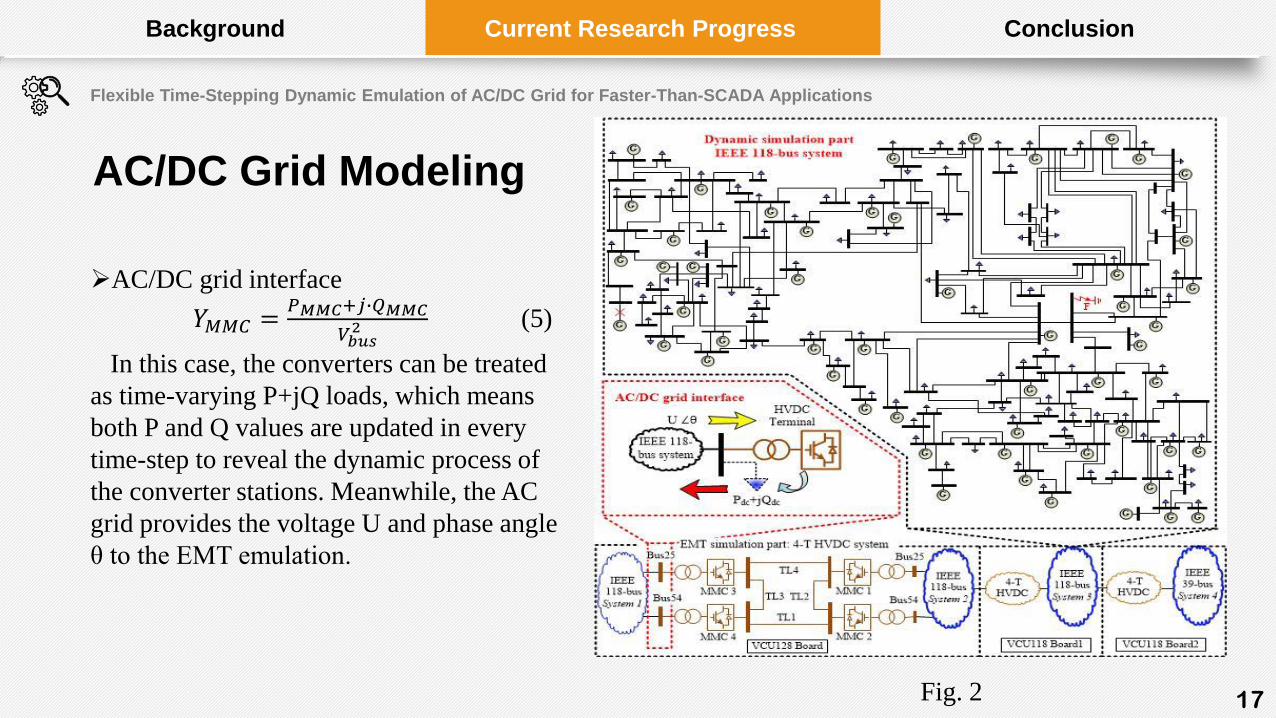
Flexible Time-Stepping Dynamic Emulation of AC/DC Grid for Faster-Than-SCADA Applications
➢AC/DC grid interface
𝑌𝑀𝑀𝐶 =𝑃𝑀𝑀𝐶+𝑗∙𝑄𝑀𝑀𝐶
𝑉𝑏𝑢𝑠2 (5)
In this case, the converters can be treated
as time-varying P+jQ loads, which means
both P and Q values are updated in every
time-step to reveal the dynamic process of
the converter stations. Meanwhile, the AC
grid provides the voltage U and phase angle
θ to the EMT emulation.
Fig. 2
Background Current Research Progress Conclusion

Hardware Emulation on FPGA
18
Background Current Research Progress Conclusion
Flexible Time-Stepping Dynamic Emulation of AC/DC Grid for Faster-Than-SCADA Applications
➢ Relationship between hardware resources
and synchronous generators
Fig. 3
➢FTRT ratio under various contingencies

Hardware Emulation Results
19
Flexible Time-Stepping Dynamic Emulation of AC/DC Grid for Faster-Than-SCADA Applications
➢ Three phase to ground fault.
At the time of 5s, a three-phase-to-
ground fault occurs at Bus 68 in System 1.
The impacts after the disturbance are severe
to the AC system, including the generators’
rotor angles, bus voltages, and the
frequencies, as shown in Fig. 4. At t2=5.1 s,
the three-phase-to-ground fault is cleared,
and the system returns to the steady-state in
about 5 s.
Fig. 4
Background Current Research Progress Conclusion

Hardware Emulation Results
20
Flexible Time-Stepping Dynamic Emulation of AC/DC Grid for Faster-Than-SCADA Applications
➢ Generator Outage and Sudden Load Change
Fig. 6Fig. 5
Background Current Research Progress Conclusion
➢ Relative error:
𝜖 =𝑉𝐶𝑎𝑙𝑐𝑢𝑙𝑎𝑡𝑒𝑑−𝑉𝑇𝑆𝐴𝑇
𝑉𝑇𝑆𝐴𝑇∙ 100% (6)
Fig. 7

Hardware Emulation Results
21
Flexible Time-Stepping Dynamic Emulation of AC/DC Grid for Faster-Than-SCADA Applications
➢ Working principle of the proposed FTRT emulation
The proposed FTRT emulation can be utilized by the power control center in a real power
transmission system, as given in Fig 8. Once a disturbance occurs and is detected, the peripheral devices
delivered the recorded data to the FPGA boards running a virtual grid via the high-speed interfaces of the
FPGA board, including QSFP (Quad Small Form-factor Pluggable), Samtec® FireFly, and Ethernet
interfaces. Meanwhile, in the control center, there could be several power injection scenarios being
emulated in the FTRT hardware platforms. With more than 100 FTRT ratio, the control center has
sufficient time to come up with an optimum solution that helps maintain the synchronism of the
generators and regulate the frequency. it should be pointed out that since the focus of this work is to
demonstrate how FTRT being developed and used to maintain a stable system, only an effective solution
is demonstrated, and other control actions that are unable to stabilize the system will be automatically
disregarded.
Background Current Research Progress Conclusion

29
Background Current Research Progress Conclusion
Conclusion
• This work proposed the fine-grained relaxation and flexible time-steppingalgorithm for faster-than-real-time dynamic simulation of integrated AC/DC gridsfor dynamic security assessment (DSA) and predictive control in energy controlcenter.
• And a power injection strategy is proposed for mitigating the adverse impactsafter a serious disturbance.
• Meanwhile, the emulated dynamic network models achieved factors of more than100 faster than real-time execution.
Thank you for your attention!
Shiqi Cao