föreläsning 9 - users.isy.liu.seusers.isy.liu.se/en/rt/andersh/teaching/kurs10_sv.pdflcf = nm−1...
TRANSCRIPT

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
1
Robust Flervariabel Reglering
Föreläsning 9
Anders [email protected]
Department of Electrical EngineeringLinköpings universitet

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
2Vad gör vi i dag
■ Repetition

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
3System
System: Linjära, tidsinvarianta (LTI)
G(s) =
[A BC D
]
= D + C(sI − A)−1B
Tillståndstransformationer inför nya tillstånd, x = T x:
G(s) =
[TAT−1 TBCT−1 D
]
Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
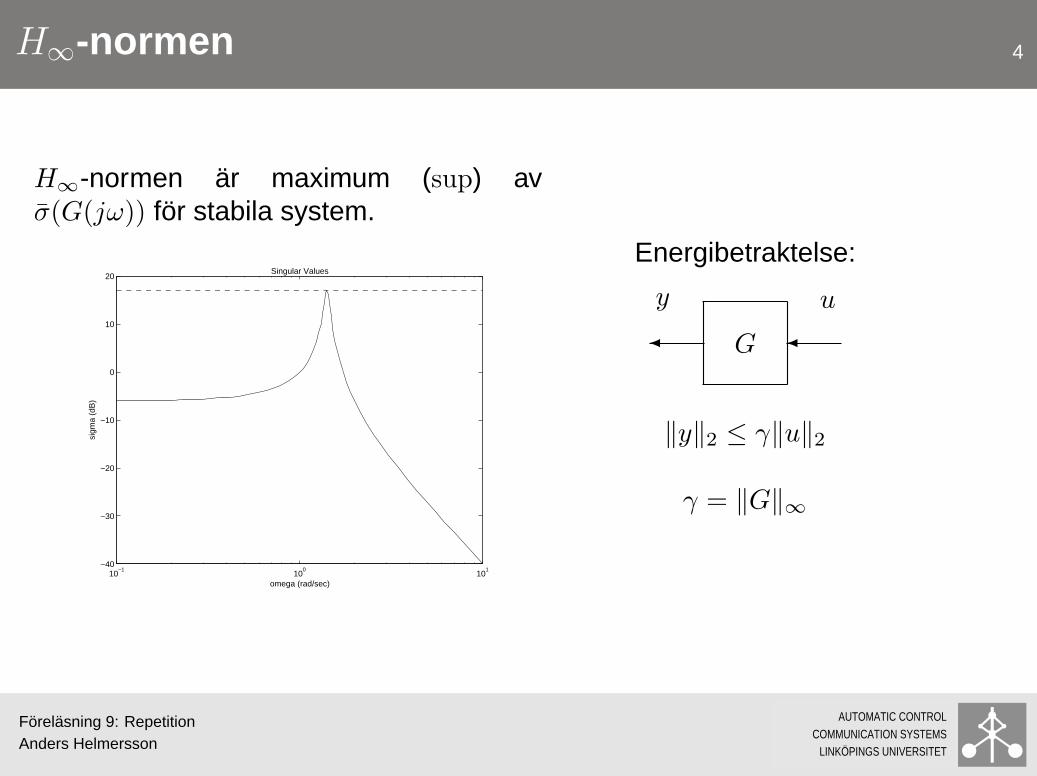
4H∞-normen
H∞-normen är maximum (sup) avσ(G(jω)) för stabila system.
10−1
100
101
−40
−30
−20
−10
0
10
20Singular Values
omega (rad/sec)
sigm
a (d
B)
Energibetraktelse:
y
� G �u
‖y‖2 ≤ γ‖u‖2
γ = ‖G‖∞

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
5Att finna ‖G‖∞
Antag D = 0:
H =
[A γ2BBT
−CT C −AT
]
Om γ > ‖G‖∞ så saknar H rent imaginära egenvärden.
Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
6Detekterbarhet och stabiliserbarhet
■ Ett system är detekterbart om alla instabila moder är observerbara.
■ Ett system är stabiliserbart om alla instabila moder är styrbara.

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
7Balanserad realisering
Ett system är på balanserad form om styrbarhets- ochobserverbarhetsgramianerna är lika. Det vill säga
AT Σ + ΣA + CT C = 0
ochAΣ + ΣAT + BBT = 0.
Används för modellreduktion.

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
8Stabilitet
- f+ - P
?�f+�K
6
Det slutna systemet är stabilt om
[
I KP I
]−1
∈ RH∞

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
9Youla parametrisering
Om G är stabilt så parametriserar Q ∈ RH∞ alla stabiliserande regulatorer:
- Q - G
- −G - i+
u y
?
rK = Q(I + GQ)−1
Q = K(I − GK)−1
Q ∈ RH∞
Kopplad till IMC = Internal model control.

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
10Riccati-ekvationen
Riccati-ekvationenAT X + XA + XRX + Q = 0
löses av X = x2x−1
1där
H =
[A R−Q −AT
]
stabila egenvärden[
x1
x2
]
H2 (LQR):
H =
[A −B2B
T2
−CT1
C1 −AT
]
H∞ (måste sakna egenvärden på den imaginära axeln):
H =
[A γ−2B1B
T1− B2B
T2
−CT1
C1 −AT
]

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
11Koprimfaktorisering
Koprimfaktorisering:
G = M−1N︸ ︷︷ ︸
LCF
= NM−1
︸ ︷︷ ︸
RCF
där M och N är stabila.
Faktoriseringen är dessutom normaliserad om
M(−s)∗M(s) + N(−s)∗N(s) = I

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
12LMI:er
F (x) = F0 +
n∑
i=1
xiFi där Fi = FT
i .
Mängden F (x) ≻ 0 är konvex.
Schurkomplement[
S GT
G R
]
≺ 0
är ekvivalent med S − GT R−1G ≺ 0 och R ≺ 0.

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
13Eliminationslemmat
ProblemetQ + UKV T + V KT UT ≺ 0.
har en lösning K om och endast om
U⊥QUT
⊥≺ 0,
ochV⊥QV T
⊥≺ 0
är uppfyllda.
Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
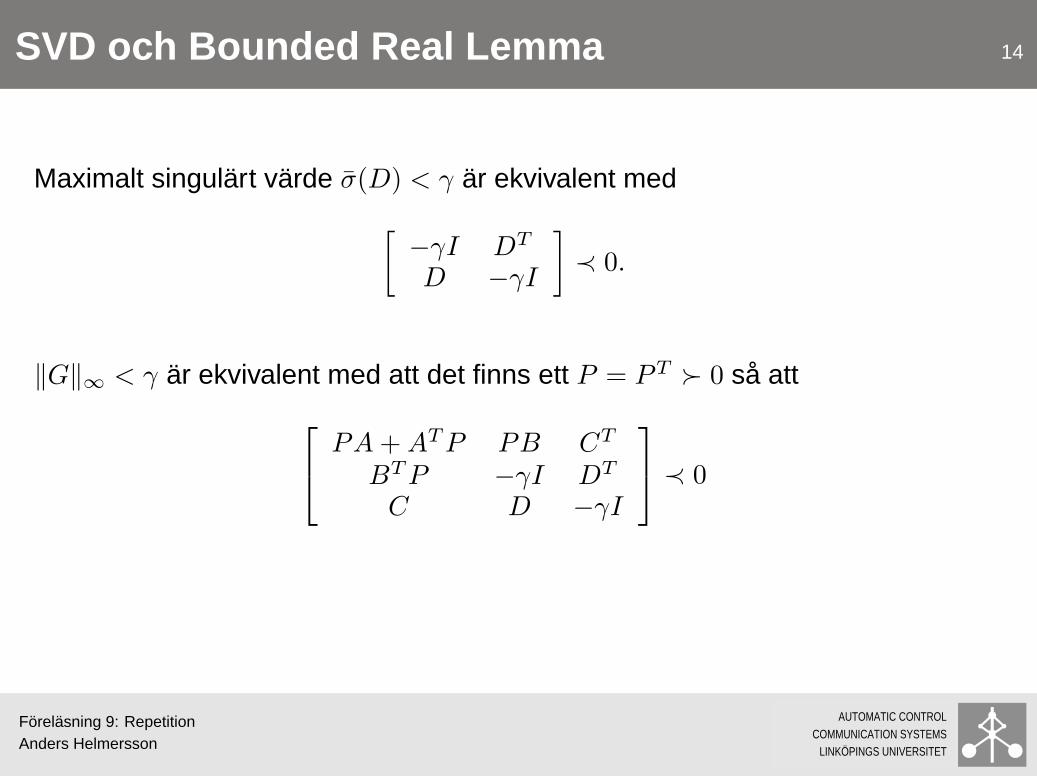
14SVD och Bounded Real Lemma
Maximalt singulärt värde σ(D) < γ är ekvivalent med
[
−γI DT
D −γI
]
≺ 0.
‖G‖∞ < γ är ekvivalent med att det finns ett P = PT ≻ 0 så att
PA + AT P PB CT
BT P −γI DT
C D −γI
≺ 0

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
15Design
Designmetoder: SISO-metoder: LQR, PID, Lead-lag
MIMO-metoder: H∞, loop-shaping, µ-syntes
Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
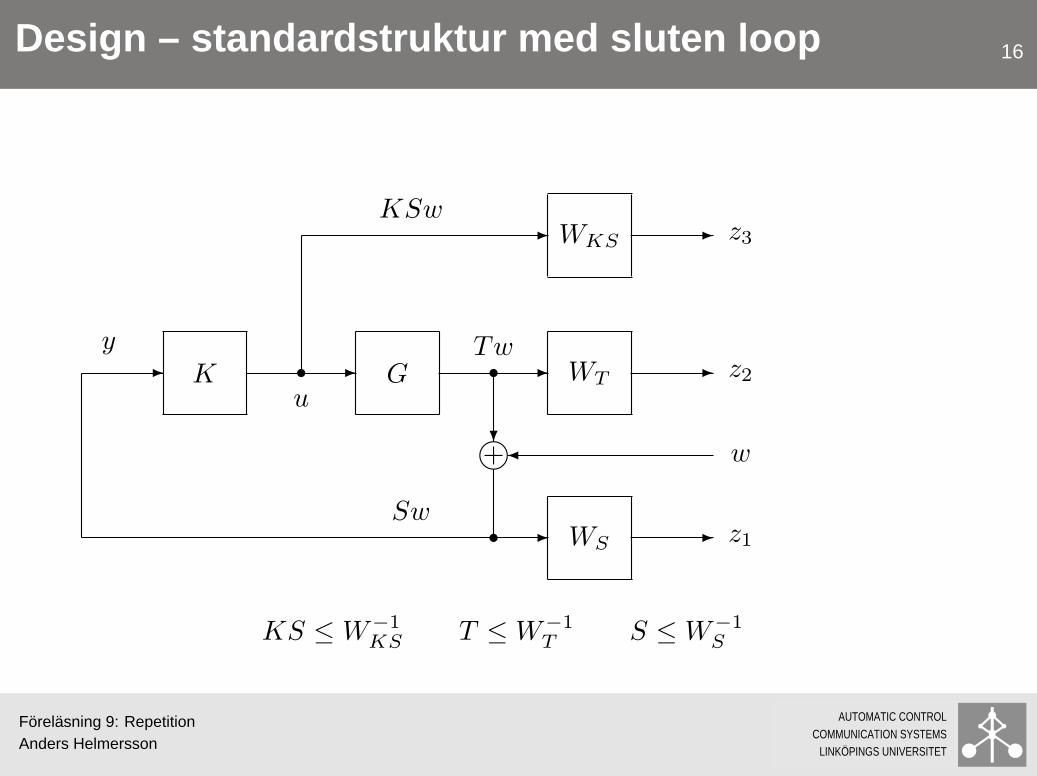
16Design – standardstruktur med sluten loop
y- K -
uG -
TwWT
- z2r
-KSw
WKS- z3
?
r
i+
rSw
� w
- WS- z1
KS ≤ W−1
KST ≤ W−1
TS ≤ W−1
S
Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
17Struktur
■ Struktur: vad vill jag uppnå.
■ Standardstruktur■ MIMO: amplitud- och fasmarginaler vid ingången kan lösas med extra
störningar, vilket kan kräva extra villkor.

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
18H∞-design
■ Inget gratis, ej förlåtande, ger exakt det man frågar om!
■ Man kan lätt få fram en regulator med hög bandbredd. Släpp i så fall påkraven och begränsa bandbredden.
■ Full rang på D12 och D21 vilket innebär direkttermer i WKS (och w → y).
■ Resulterar ofta i regulatorer med högt ordningstal.

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
19Loop shaping
Bestäm W1 och W2 så att W1GW2 får önskat utseende.
Använd ncfsyn för syntes (ǫ ≥ 0.2 − 0.3).
- i+ - W2- K∞
- W1- G -r
6
K

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
20Alternativ formulering
- i+ - K r
6
W−1
1
6
z2 w2
?
W1
?
- i+ - G - i+ - W2- z1
w1
?
W−1
2
?
r
6

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
21Lågförstärkningssatsen
För analys är lågförstärkningssatsen (small gain theorem) ett viktigt verktyg.
- G
∆ �G och ∆ stabila.
{‖∆‖∞ ≤ 1/γ‖G‖∞ < γ
⇒ slutet system stabilt.
∆ kan också vara olinjär med begränsad energiförstärkning (induceradL2-norm).

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
22Dra ut parametrarna
G
- -δ1
- -δ2
1
- -δ2 ⇔
G
-
- δ1
-
- δ1
- δ1
-
- δ2
Här får vi repeterade osäkerheter i form av δ1.

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
23D-skalningar: D∆ = ∆D, D inverterbar
�G
�
�
- ∆
�
D �G
� D−1�
�
- ∆

Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
24µ-design
(i) Hitta ett K så att ‖Fℓ(G, K)‖∞
minimeras (H∞-syntes).
(ii) Hitta ett D (med fixt K) så att∥∥DFℓ(G, K)D−1
∥∥∞
minimeras (mu ochmusynfit).
(iii) Hitta ett K (med fixt D) så att∥∥DFℓ(G, K)D−1
∥∥∞
minimeras(H∞-syntes).
(iv) Upprepa (ii) och (iii) tills konvergens eller tills γ =∥∥DFℓ(G, K)D−1
∥∥∞
blir tillräckligt litet.
Forelasning 9: RepetitionAnders Helmersson
AUTOMATIC CONTROL
LINKÖPINGS UNIVERSITETCOMMUNICATION SYSTEMS
25Modellreduktion
H∞-design ger ofta högt ordningstal på regulatorn, ibland 50 till 100 tillstånd(viktsfunktioner + G).
Orealistiskt att implementera.
Reduktionsteg:
■ Använd balansering och trunkering för att ta bort tillstånd som är knapptmärkbara (sysbal, sncfbal).
■ Ta bort snabba poler (mycket större än bandbredden). Ersätt snabbdynamik med en konstantterm.
■ Använd sedan mer avancerade metoder, såsom viktad modelreduktion.