improved unsteady aerodynamic influence …digitool.library.mcgill.ca/thesisfile117219.pdfimproved...
TRANSCRIPT

Improved Unsteady AerodynamicInfluence Coefficients for Dynamic
Aeroelastic Response
Quinn Murphy
Department of Mechanical EngineeringMcGill UniversityMontreal, Canada
December 2012
A thesis submitted to McGill Universityin partial fulfillment of the requirements for the degree of
Master of Engineering
c©Quinn Murphy 2012

Abstract
Flutter, or the dynamic instability of an aircraft wing due to aerodynamic loads, must be
considered when designing an aircraft. For this reason work has been done to improve a
method developed at Bombardier Aerospace to analyze the dynamic aeroelastic response
of aircraft. This method replaces original Doublet Lattice Method (DLM) aerodynamic
data with that from high-fidelity Computational Fluid Dynamics (CFD) codes. The new
aerodynamic loads are transmitted to the NASTRAN aeroelastic module through improved
Aerodynamic Influence Coefficients (AIC). Previously this high-fidelity data was solely
steady, and weighting factors were needed to obtain unsteady data. This gave good results
for flutter calculations in the subsonic and transonic regime, however, for improved results
in the transonic and supersonic regime, unsteady aerodynamic data was needed. This
research incorporates unsteady high-fidelity CFD data into this analysis method.
The unsteady CFD data was obtained by means of the Transpiration Method. This
allowed for the unsteady movement of the model to be accounted for, while saving compu-
tational time needed to deform and remesh the aerodynamic mesh at each time step. The
transpiration method was validated with two standard test cases, for both static deflections
and unsteady cyclic movement. Once this method was validated, high-fidelity CFD results
could then be used in the AIC method.
The AIC method begins with a set of baseline modes being obtained for the wing
model. From these modes an aerodynamic base is calculated. Using the AIC method
this aerodynamic base is transferred to NASTRAN. The natural mode shapes of a new
configuration, along with the modal-based AIC method are used to approximate aerodynamic
loads for the new configuration. These loads are used in NASTRAN to compute the flutter
analysis of the new configuration.
Resume
Le flottement, ou instabilite dynamique des ailes d’un avion du a sa charge aerodynamique,
doit etre considere lors de la conception d’un avion. Pour cette raison, la methode d’analyse
de l’aeroelasticite d’un avion developpee par Bombardier Aeronautique, doit etre amelioree.
La nouvelle methode, utilisant un code de calcul dynamique des fluides, ou Computational
Fluid Dynamics (CFD), remplace la methode originale du “Doublet Lattice Method”. La
nouvelle charge aerodynamique est transmise au module d’aeroelasticite de NASTRAN a
l’aide d’un “Coefficient d’Influence Aerodynamique (AIC)” ameliore. Precedemment, seules
les donnees stationnaires etaient de haute fidelite et un facteur de correction etait necessaire
pour completer les donnees instationnaires. Ces donnees fournissaient de bons resultats
pour les calculs du flottement en regimes subsonique et transsonique. Cependant, pour les
cas de regimes transsonique et supersonique, des donnees aerodynamiques instationnaires
sont necessaires pour ameliorer les resultats. Cette etude introduit donc les donnees
instationnaires de haute fidelite provenant du calcul dynamique des fluides.
Les donnees instationnaires generees par le calcul dynamique des fluides sont obtenues au
moyen de la “Methode par Transpiration”. Cette methode permet de prendre en compte la
composante instationnaire tout en minimisant le temps de calcul necessaire pour deformer et
remailler le maillage aerodynamique a chaque pas de temps. La methode par Transpiration
a ete valide par deux tests standards, pour des cas de deflections statiques et de mouvements
cycliques instationnaires. Une fois cette methode validee, les resultats de haute fidelite
du calcul dynamique des fluides peuvent etre utilises pour la methode AIC. La methode
AIC est initiee avec des modes de bases obtenus pour des ailes, ce qui permet de calculer
une base aerodynamique. Cette base aerodynamique est ensuite transferee NASTRAN en
utilisant la methode AIC. La forme des modes naturels de la nouvelle configuration, avec
les bases modales de la methode AIC, permet d’approximer la charge aerodynamique de

la nouvelle configuration. Cette charge est ensuite utilisee par NASTRAN pour resoudre
l’analyse du flottement pour la nouvelle configuration.

Acknowledgements
First and foremost, I would like to thank my family, who have supported me throughout
this entire process and my entire career. They have been there for me and are the sole
reason I was able to complete this challenge.
I would also like to thank both of my supervisors, Eddy Zuppel and Prof. Mathias
Legrand, for the support and guidance that they have given to me. This project would not
have been possible without their help.
Finally, I would like to extend my gratitude to everyone in the Controlled Facilities
Engineering Services and Dynamics Groups at Bombardier Aerospace for their continuing
support with this project.

Contents
Introduction 1
1 Literature Review 3
1.1 Current Aeroelastic Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Aeroelastic Analysis at Bombardier . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.1 Notations for Matrix Equations . . . . . . . . . . . . . . . . . . . . . 6
1.2.2 Aerodynamic and Structural Data Mapping . . . . . . . . . . . . . . 6
1.2.3 Aerodynamic Loads in NASTRAN . . . . . . . . . . . . . . . . . . . 6
1.2.4 Flutter Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3 Unsteady Aerodynamic Analysis . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Transonic Aerodynamic Analysis . . . . . . . . . . . . . . . . . . . . . . . . 11
1.5 Modal Based AIC Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.6 Transpiration Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.7 Evaluation of CFD Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.7.1 DLM Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.7.2 Wind Tunnel Methodology . . . . . . . . . . . . . . . . . . . . . . . 17
1.7.3 High-Fidelity CFD Methodology . . . . . . . . . . . . . . . . . . . . 18
i
2 Transpiration Boundary Condition 19
2.1 Undeflected Aerodynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2 Deflection of the Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 Natural Mode Shapes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4 Defining the Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . . 22
2.5 Computational Fluid Dynamic Simulations . . . . . . . . . . . . . . . . . . 22
2.6 Unsteady Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.7 Processing Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.8 Implementation of High-Fidelity CFD Data into NASTRAN . . . . . . . . . 24
3 Validation of the Transpiration Method 25
3.1 BACT Wing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 AGARD Wing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4 Modal Based AIC Method in NASTRAN 34
4.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2 Lifts and Moments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.3 Unsteady Lifts and Moments . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5 Validation of High-Fidelity CFD Results 57
5.1 Defining the Deflected Model . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.2 Results and Comparison to DLM . . . . . . . . . . . . . . . . . . . . . . . . 58
5.2.1 Steady Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.2.2 Unsteady Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Conclusions 69
Bibliography 72
ii

A Program Scripts 74
A.1 Deflecting Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
A.2 Transpiration Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . . 79
A.3 Processing Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
iii

List of Figures
1.1 Transpiration Method Concept . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2 Transpiration Method Model . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3 Linear Regression of Wind Tunnel Data . . . . . . . . . . . . . . . . . . . . 18
2.1 Natural Mode Shapes of AGARD Wing . . . . . . . . . . . . . . . . . . . . 21
3.1 BACT Wing Model Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2 Deflected Trailing Edge Flap . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3 Convergence of Solution Residuals - BACT Wing . . . . . . . . . . . . . . . 28
3.4 Pressure Contour . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.5 Comparison of Pressure Distribution for Actual and Simulated Flap Deflection
of 10◦ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.6 AGARD Wing Model Dimensions . . . . . . . . . . . . . . . . . . . . . . . . 31
3.7 AGARD Wing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.8 Convergence of Solution Residuals - AGARD Wing . . . . . . . . . . . . . . 32
3.9 Pressure Contour for Deflection of AGARD Wing . . . . . . . . . . . . . . . 33
3.10 Comparison of Pressure Distribution for Actual and Simulated Deflection of
AGARD Wing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.1 Real ∆Cl for First Natural Mode, M = 0.77 . . . . . . . . . . . . . . . . . . 41
iv
4.2 Real ∆Cm for First Natural Mode, M = 0.77 . . . . . . . . . . . . . . . . . 42
4.3 Real ∆Cl for Second Natural Mode, M = 0.77 . . . . . . . . . . . . . . . . 43
4.4 Real ∆Cm for Second Natural Mode, M = 0.77 . . . . . . . . . . . . . . . . 44
4.5 Real ∆Cl for Third Natural Mode, M = 0.77 . . . . . . . . . . . . . . . . . 45
4.6 Real ∆Cm for Third Natural Mode, M = 0.77 . . . . . . . . . . . . . . . . . 46
4.7 Real ∆Cl for Fourth Natural Mode, M = 0.77 . . . . . . . . . . . . . . . . . 47
4.8 Real ∆Cm for Fourth Natural Mode, M = 0.77 . . . . . . . . . . . . . . . . 48
4.9 Imaginary ∆Cl for First Natural Mode, M = 0.77 . . . . . . . . . . . . . . . 49
4.10 Imaginary ∆Cm for First Natural Mode, M = 0.77 . . . . . . . . . . . . . . 50
4.11 Imaginary ∆Cl for Second Natural Mode, M = 0.77 . . . . . . . . . . . . . 51
4.12 Imaginary ∆Cm for Second Natural Mode, M = 0.77 . . . . . . . . . . . . . 52
4.13 Imaginary ∆Cl for Third Natural Mode, M = 0.77 . . . . . . . . . . . . . . 53
4.14 Imaginary ∆Cm for Third Natural Mode, M = 0.77 . . . . . . . . . . . . . 54
4.15 Imaginary ∆Cl for Fourth Natural Mode, M = 0.77 . . . . . . . . . . . . . 55
4.16 Imaginary ∆Cm for Fourth Natural Mode, M = 0.77 . . . . . . . . . . . . . 56
5.1 Spanwise Comparison of high-fidelity CFD and DLM results for First Natural
Mode, M = 0.77 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.2 Panel Comparison of high-fidelity CFD and DLM results for First Natural
Mode, M = 0.77 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.3 Spanwise Comparison of high-fidelity CFD and DLM results for Second
Natural Mode, M = 0.77 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.4 Panel Comparison of high-fidelity CFD and DLM results for Second Natural
Mode, M = 0.77 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.5 Spanwise Comparison of high-fidelity CFD and DLM results for Third Natural
Mode, M = 0.77 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
v
5.6 Panel Comparison of high-fidelity CFD and DLM results for Third Natural
Mode, M = 0.77 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.7 Spanwise Comparison of high-fidelity CFD and DLM results for Fourth
Natural Mode, M = 0.77 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.8 Panel Comparison of high-fidelity CFD and DLM results for Fourth Natural
Mode, M = 0.77 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.9 Comparison of Real and Imaginary ∆Cl for First Natural Mode, M = 0.77 64
5.10 Comparison of Real and Imaginary ∆Cm for First Natural Mode, M = 0.77 65
5.11 Comparison of Real and Imaginary ∆Cl for Second Natural Mode, M = 0.77 65
5.12 Comparison of Real and Imaginary ∆Cm for Second Natural Mode, M = 0.77 66
5.13 Comparison of Real and Imaginary ∆Cl for Third Natural Mode, M = 0.77 66
5.14 Comparison of Real and Imaginary ∆Cm for Third Natural Mode, M = 0.77 67
5.15 Comparison of Real and Imaginary ∆Cl for Fourth Natural Mode, M = 0.77 67
5.16 Comparison of Real and Imaginary ∆Cm for Fourth Natural Mode, M = 0.77 68
vi

Introduction
The Controlled Facilities Engineering Services and Dynamics Groups at Bombardier
Aerospace have developed a methodology to analyze the dynamic aeroelastic response of
aircraft, or more specifically, the flutter response. Flutter being the dynamic instability
of an elastic body, such as an aircraft wing, when subjected to aerodynamic loads [17].
The method was initially investigated as it was determined that a more cost and labor
effective tool needed to be developed In-House at Bombardier for such aeroelastic analysis.
This method was developed to be used with aerodynamic data obtained from the Doublet
Lattice Method (DLM), which is included in the structural solver in use by Bombardier.
This method has proven to be very useful in preliminary design stages of an aircraft design
program at Bombardier. The limitations introduced by the Doublet Lattice Method have
resulted in less reliable aerodynamic calculations in the transonic regime. High-fidelity
Computation Fluid Dynamic (CFD) solvers must be used to obtain the aerodynamic data.
This need for more accurate aerodynamic analysis is even greater during the preliminary
design stage of a program when other forms of data, such as wind tunnel tests, are not
available.
In order to overcome these deficiencies, work has been done with this new method
to incorporate high-fidelity CFD data into the flutter calculations, however, only steady
aerodynamic data was able to be obtained and used. The addition of steady high-fidelity
1
CFD data proved to give improved results for flutter calculations in the subsonic regime. For
the transonic and supersonic regimes the results were not as reliable. This is where the need
for unsteady high-fidelity CFD data comes. The incorporation of unsteady aerodynamic
data to the methodology will provide more accurate results in the transonic and supersonic
regimes.
A review of current aeroelastic analysis techniques is presented, with focus on the
analysis process of MSC/NASTRAN [14], followed by a review of unsteady and transonic
aerodynamic analysis. The modal based Aerodynamic Influence Coefficient (AIC) method is
explained briefly as well as how it is incorporated in this project. Finally, the transpiration
boundary condition is reviewed and explained. Validation of the transpiration method is
presented for both steady and unsteady test cases. These validations are performed with
Euler calculations, since the transpiration method, as used in this project, is restricted to
such calculations.
The mesh used to perform the high fidelity CFD calculations needed to be deformed
based on the mode shapes of the structure. This is where the transpiration method was
utilized, as surface velocities were modified to simulate these deflections. The high-fidelity
CFD data is compared to DLM results to ensure accuracy. Finally, the unsteady data is
used in the modal based AIC method to obtain flutter solutions for subsonic and transonic
flows.
2

Chapter 1
Literature Review
1.1 Current Aeroelastic Analysis
The AIC method being developed at Bombardier is the focus of this research, however,
in order to introduce the general context of this research area, other existing strategies
currently being developed are also briefly reviewed. The pros and cons of each of them are
underlined. For the purpose of this research only methods pertaining to fixed wing aircraft
wings were examined, and hence other aeroelastic problems are not discussed. The first of
the other methods employs the commercial aerodynamic and aeroelastic solver ZAERO,
produced by Zona Technologies. This solver is able to perform both aerodynamic and
aeroelastic analysis, however it is unable to perform structural finite element solutions and
require the import of structural free vibration solutions. Further information on the details
of ZAERO can be found in reference [1].
The second method under investigation incorporates the commercial code AERO Suite,
produced by CMSoft. This method and AERO Suite are able to perform the full aerody-
namic, structural and aeroelastic analysis, unlike ZAERO which requires the addition of the
3

structural analysis to be performed by an external source. It has been found to be a very
powerful tool in aeroelastic analysis, however, it is also very labor intensive. Again, more
details on this method may be found in reference [6]. Although both methods mentioned
here are suitable for the aeroelastic analysis required by Bombardier, it is of interest to
develop a comparable In-House solution that is less time and labor intensive. This interest
is the motivation for the research of the AIC method presented here.
A third method for aeroelastic analysis is with the use of the commercial codes produced
by ANSYS. This includes their aerodynamics solver ANSYS CFX coupled with their
structural solver ANSYS Mechanical. The method is similar to the AIC method, as it
requires the structural and aerodynamic analysis to be completed separately and the
information to be passed from one solver to the other. Reference [2] describes in greater
detail this process and the ANSYS commercial codes.
Further to the previously mentioned methods, the Computational Aero Servo Elasticity
(CASE) Laboratory in the Department of Mechanical and Aerospace Engineering at Okla-
homa State University, in conjunction with the NASA Dryden Flight Research Centre, have
developed an aeroelastic analysis tool, Structural Analysis Routines (STARS). This is an
multidisciplinary, finite element based solver, which is capable of structural, heat transfer,
aerodynamic and aeroelastic analysis. This tool is very powerful but also very labor and
time intensive. For information about STARS see reference [12].
As previously mentioned, all of the other methods investigated meet the requirements of
Bombardier for aeroelastic analysis, however, it was determined that a more cost and labor
effective tool needed to be developed In-House. For this reason the AIC method was further
investigated, as it incorporates current analysis techniques used at Bombardier. This will
be expanded upon in the following sections.
4

1.2 Aeroelastic Analysis at Bombardier
The current analysis of aeroelastic problems at Bombardier Aerospace is done with
the use of NASTRAN, a commercial structural Finite Element Method (FEM) solver.
NASTRAN is able to perform different aeroelastic cases, Static Aeroelasticity, Dynamic
Stability and Dynamic Response, by means of a combination of an aerodynamic and
structural model.
The Static Aeroelastic case will provide information of deflection of an aircraft configu-
ration. This will provide information on the needed structural resistance of a configuration
which must then be made aerodynamically efficient. The process to find a balance between
structural and aerodynamic efficiency can prove to be very difficult.
The Dynamic Stability case, more specifically Flutter, is the case of most interest for
the project at hand. Flutter is when the combination of aerodynamic loads and the natural
modes of the aircraft structure interact with one another, causing potentially catastrophic
results. It is therefore of the utmost importance to be able to predict these interactions,
and hence design to stay well outside of the dangerous limits. The current flutter analysis,
performed in NASTRAN, utilizes the Doublet Lattice Method with dynamic weighting
provided from wind tunnel data. This method has proved to be very reliable for the subsonic
regime [15].
The method used by the NASTRAN solver is described below, and is based on Reference
[15] and the NASTRAN Aeroelastic User Guide [14]. The models used for the aerodynamic
and structural simulations are described in later sections of this thesis.
5

1.2.1 Notations for Matrix Equations
Throughout this report, the following notation will be used when describing the matrix
calculations used.
[Qkk] = [Skj ] [Ajj ]−1 [Djk
1 + ikDjk2]
Here the subscript kk refers to the dimensions of the matrix [Q]. The imaginary index is
denoted by i. The superscripts 1 and 2 denote the real and imaginary components of the
term in the equation.
1.2.2 Aerodynamic and Structural Data Mapping
As the aerodynamic model and structural model of the aircraft are not necessarily
the same, a mapping of the data from the aerodynamic grid points to the structural grid
points, or interpolation, must be completed. This interpolation is called splining. Splining
the data is what enables the transfer of displacements and velocities from the structural
model to the aerodynamic model. There are several methods used for spline data, including
one-dimensional splines and surface splines.
Regardless of splining method chosen, an interpolation matrix will be produced. This
matrix, usually denoted as [Gkg], relates the deflection of the structural grid points, {ug},
to the aerodynamic grid points, {uk}, as is written below:
{uk} = [Gkg] {ug} (1.1)
1.2.3 Aerodynamic Loads in NASTRAN
In order to calculate the aerodynamic loads on the model, which are necessary for
analyzing the aeroelastic phenomenon, NASTRAN utilizes the Doublet Lattice Method.
This method uses lifting surface theory. The aerodynamic data calculated using the DLM is
6

then used to produce an Aerodynamic Influence Coefficient matrix. This matrix defines the
aerodynamic properties of the model. This matrix is created from the relationship between
the lifting pressure on a panel and the change in angle of attack of that panel with regard
to the flow reproduced by applying a downwash to the panel. The basic equation of this
applied downwash is displayed below:
{wj} = [Ajj ]
{fjq
}(1.2)
where
{wj} : Downwash
[Ajj ] : Aerodynamic Influence Coefficient Matrix;
a function of Mach Number, M and Reduced Frequency, k
{fj} : Pressure on lifting element
q : Dynamic pressure of airflow
The displacement of the structural grid points is accounted for in the downwash through
the substantial differentiation matrix, [D]. The contribution to the downwash is then
represented by the following equation.
{wj} =[Djk
1 + ikDjk2]{uk}+ {wjg} (1.3)
where
[Djk
1] [Djk
2]
: Real and Imaginary parts of Substantial Differentiation Matrix
{wjg} : Initial static aerodynamic downwash
7

From the pressure data of each panel of the aerodynamic model, the forces and moments
can be obtained. The force is found by multiplying the pressure on the panel by the area of
the aerodynamic panel. The total force theoretically acts through the quarter chord point
of the airfoil, or aerodynamic panel. The moment is then calculated by multiplying this
force by the distance between the quarter chord line and the mid-chord line of the panel.
This is all done by means of the following equation:
{Pk} = [Skj ] {fj} (1.4)
where
{Pk} : Lifts and Moments of each aerodynamic box
[Skj ] : Integration Matrix
Finally, the Aerodynamic Influence Coefficient (AIC) Matrix can be formed by combining
Equations (1.2), (1.3) and (1.4) to produce
[Qkk] = [Skj ] [Ajj ]−1 [Djk
1 + ikDjk2]
(1.5)
This Aerodynamic Influence Coefficient Matrix, [Qkk], is calculated by using only the
aerodynamic model, and hence must be applied to the structural model. Applying the
aerodynamic matrix to the structural model is done by using the splining method described
earlier. To reduce this problem from a continuous, and hence infinite size problem, a modal
approach is used to form an eigenvalue problem. This is also done for the mass and stiffness
matrices of the aeroelastic model. Once this modal approach is taken, Equation (1.5) can
8
be transformed into the following AIC Matrix.
[Qii] = [φai]T [Gka]
T [WTFACT ] [Qkk] [Gka] [φai] (1.6)
where
[Qii] : Generalized Aerodynamic Matrix
[φai] : i Normal mode vectors for physical a-set
[Gka] : Interpolation Matrix reduced to a degrees of freedom
[WTFACT ] : Correction Factor Matrix, based on wind tunnel data
When the extra points from the aerodynamic model are not needed for the aeroelastic
calculations, the generalized aerodynamic matrix, [Qhh] is the [Qii] matrix of Equation (1.6).
Also, the Correction Factor Matrix, which is based on wind tunnel data was used in previous
research as the steady high-fidelity CFD data was considered. This lead to the introduction
of a factor, [WTFACT ] being needed to modify the unsteady portion of the [Qkk] matrix.
In this research, both steady and unsteady aerodynamic analyses were considered and hence
this weighting factor is not needed.
1.2.4 Flutter Solution
In order to complete the aeroelastic flutter analysis, the p k Method developed in
Reference [8] is employed by the structural finite element solver MSC/NASTRAN. This is
done by including the Generalized Aerodynamic Matrices, defined in the previous section,
into the fundamental equation for modal flutter analysis using the p k Method, Equation (1.7)
9

written below:
[Mhhp
2 +
(Bhh −
1
4
ρcV QIhhk
)p+
(Khh −
1
2
ρV 2QRhhk
)p
]{uh} = 0 (1.7)
where
QIhh : Imaginary part of Generalized Aerodynamic Matrix,
a function of Mach Number, M and Reduced Frequency, k
QRhh : Real part of Generalized Aerodynamic Matrix,
a function of Mach Number, M and Reduced Frequency, k
p : Eigenvalue
k : Reduced Frequency, k =( ωc
2V
)=( c
2v
)Im (p)
This method solves for a flutter solution by means of an iterative process aiming to
match the eigenvalues with the frequency in Equation (1.7). This is done for each mode by
first selecting an airspeed. An initial value of frequency, and hence reduced frequency is
then chosen. The eigenvalues, p are then calculated from Equation (1.7). These eigenvalues
are then compared with the reduced frequency, k. The values must match, if this is not
the case, the value of frequency, ω is modified to match the imaginary part of the selected
mode’s frequency. This is repeated until the process converges, and is then completed for
all modes. To obtain the full flutter solution, the entire process is performed again for all
necessary airspeeds.
10

1.3 Unsteady Aerodynamic Analysis
Unsteady aerodynamic analysis is a computationally intensive process. In order to
achieve a time accurate solution for a situation such as flutter, the solver must simulate the
conditions of the flow accurately at each time step. This implies that for a flutter solution
the deformation of the wing must be prescribed at each time step.
This deformation is prescribed by the natural modes of the structure of the wing. In
this study, the natural modes, and their accompanying natural frequencies were calculated
using NASTRAN and are described in more detail in Chapter 2. Then, using the chosen
method, the mesh is deformed for each time step. A simulation is then run to convergence
at each time step with each deformed mesh. The results of this time accurate simulation are
then post processed to determine real and imaginary components of the aerodynamic forces
and loads. This post processing is achieved by analyzing the unsteady data using the Fast
Fourier Transform. The FFT analyzes the lift generated by the unsteady simulations as a
signal input and is able to produce information on the frequency and real and imaginary
components of this signal. This process was done using MATLAB and the results of which
can be found in Chapter 4.
1.4 Transonic Aerodynamic Analysis
When studying the aerodynamics in the transonic regime, Mach numbers between 0.8
and 1.2, there are unique difficulties which arise. These difficulties manifest themselves
due to the governing equations which are used to solve the problem, namely the linearized
velocity potential equation:
(1−M∞2
) ∂2φ∂x2
+∂2φ
∂y2= 0 (1.8)
11

These methods and equations will be discussed further in Chapter 1.7 with regard to
the Doublet Lattice Method. The linearized velocity potential equation, Equation (1.8), is
only valid for small perturbations, i.e. thin bodies at small angles of attack, and is only
valid for Subsonic and Supersonic Mach numbers. Because of this, the results for the DLM
in the transonic regime do not show the same accuracy as the subsonic results. For this
reason high-fidelity Computational Fluid Dynamics, such as Euler or Navier-Stokes, must
be used to solve these problems. This will also be discussed in Chapter 1.7.
1.5 Modal Based AIC Method
The Aerodynamic Influence Coefficient Matrix was described above. It was shown
that the AIC Matrix used in the Doublet Lattice Method (DLM) is formed from a purely
aerodynamic source. This is due to the fact that the AIC matrix is produced as a result of
downwash applied to the aerodynamic panels.
However, Chen et al. [16] developed a procedure to produce a modal based AIC matrix,
which is created from the modal displacements of the model, and thus contains both
aerodynamic and structural information.
This method begins by examining the pressure difference created by a deformation of
the model by the natural modes of the structure. This is expressed as
∆Cpij = N (φij) (1.9)
where
N : Nonlinear operator
φij : Natural modes of the structure
12

The nonlinear operator represents the nonlinear equations which high-fidelity CFD
codes utilize in solving the aerodynamics of the problem. This can be replaced by a linear
operator, L as the model displacements are assumed to be small, as in linear aerodynamics.
Equation (1.9) then becomes
∆Cpij = L (φij) (1.10)
Now, as in the Rayleigh-Ritz method [7], the mode shapes of k number of modes can be
determined by i number of baseline modes and coefficients qki.
hkj = qkiφij (1.11)
The coefficients, qki, are determined through the following least-square procedure:
qki =[(φij
Tφij)−1
φijT]hkj (1.12)
This same method and least-square procedure is applied to the linear operator in
Equation (1.10):
L = ∆Cpij
[(φij
Tφij)−1
φijT]hkj (1.13)
This linear operator is now defined as the modal-based AIC matrix, [Am], and is used
to connect any set of mode shapes to a related pressure difference. This is shown below:
∆Cp = [Am]h (1.14)
Now the modal-based AIC matrix contains both aerodynamic information, from the
baseline modes, as well as structural information from the deformed mode shapes. Therefore,
it is possible to use this modal-based AIC matrix to determine the pressure difference for a
13

new structure with slightly different modes. This is different from the original AIC matrix
developed by NASTRAN which only uses the downwash on the aerodynamic panels; this
new pressure difference is related to the modes shapes. This method is also well suited for
use with high-fidelity CFD codes.
1.6 Transpiration Method
In order to perform the unsteady time dependent aerodynamic solutions, the aerodynamic
model needed to deform at each time step. In the past this was accomplished by actually
deforming the aerodynamic model and remeshing the entire domain. This is very time
consuming, both in terms of man hours and computational hours. In order to circumvent
this, a method known as the Transpiration Method was employed. This method was first
introduced by Lighthill [13], which discuses the method of accounting for viscous effects
in the boundary layer on the inviscid flow outside by modifying the surface conditions
and implementing the Method of Equivalent Sources. The method introduces a velocity
to the surface of the model which in turn simulates a deflected surface. This is described
in Figure 1.1 below: The original surface normal has x, y and z components which can
VNew
VOriginal
VTranspiration
n
n
New
Original
Figure 1.1: Transpiration Method Concept
be modified by changing the velocity boundary condition on this surface. This boundary
condition modification is achieved through the addition of fluid velocity applied to the
14

surface. This can be seen in Figure 1.1, where VOriginal is the original surface tangent
fluid velocity, which has the surface normal, nOriginal, and the deformed surface has the
surface normal, nNew and resulting surface fluid velocity, VNew, due to the application of
transpiration velocity, VTranspiration.
The fluid velocity boundary condition is governed by the equation of flow tangency and
the fact that there must be no flow through the surface. This is stated in the equations
below for both the steady and unsteady cases.
V · n = 0 (1.15)
V · n = VBody · n (1.16)
Equation (1.15) simply states the fluid velocity normal to the surface must be zero,
whereas Equation (1.16) states that the fluid velocity must remain normal to the surface of
the body, and hence assume the velocity of the moving body to ensure that there is no flow
through the surface of the body. It is important to note that, the velocity in Equation (1.16),
VBody, is not the transpiration velocity, VTranspiration, shown in Figure 1.1.
This procedure is then implemented over the entire deformed surface. The surface
deformation is calculated by means of a structural solver (for this project NASTRAN was
used) and the resulting deformed normals then define the boundary conditions for each
surface element.
This procedure can also be applied to sudden deformations, or discontinuities, such as
flaps or ailerons. This was the first validation case that was studied in this thesis when
investigating the accuracy of this method. The model used is shown in Figure 1.2.
The results of this can be found in Chapter 3. Using the transpiration method for
sudden discontinuities also eliminates the issues of grid stretching and ill-proportioned
volumes around the discontinuities. The transpiration method was studied and verified
15

Figure 1.2: Transpiration Method Model
extensively in Reference [5].
This method has also demonstrated its effectiveness in aeroelastic analysis, as is shown
in the works of Fisher and Arena [3], [4].
The methodology used to implement the Transpiration method can be found in Chap-
ter 2.
1.7 Evaluation of CFD Methods
There are several methods available to produce the aerodynamic data required for use
with flutter analysis. The first method, currently used at Bombardier, is the Doublet Lattice
Method, DLM. This along with Wind tunnel data, are the main sources of aerodynamic
data for flutter calculations. These methods will be described in the following sections. The
advancement of Computation Fluid Dynamic (CFD) solvers has offered the opportunity
to utilize this method in addition to wind tunnel data which can be time consuming and
difficult to obtain. These CFD methods will also be discussed.
16

1.7.1 DLM Methodology
The Doublet Lattice Method, DLM, is based on potential flow theory and utilizes the
main simplification of neglected viscosity. It is based on the linearized velocity potential
equation stated below [9]:
(1−M∞2
) ∂2φ∂x2
+∂2φ
∂y2= 0 (1.17)
Values of lift and moments can be extracted from this and used to form the aerodynamic
matrices needed for the aeroelastic solver.
1.7.2 Wind Tunnel Methodology
In a similar manner to that of the Doublet Lattice Method, the lifts and moments
needed to construct the aerodynamic matrices can be extracted from pressures and velocity
data on the surface for the model. The main difference being this data is obtained from
pressure taps positioned at strategic locations on the wing of the model. There are usually
between five and ten span-wise locations along the wing at which this data is measured.
The data is measured at set flow conditions, but at varying angles of attack.
This data is then correlated to the same locations and divisions as used in the DLM. A
linear regression is performed on the data at the different angles of attack to produce the
change in lift and moment, or more specifically the change in lift and moment coefficients,
Clα and Cmα respectively. The linear regression line is defined by the equation: y = ax+ b.
The slope of this line, a, determines the variation of the lift and moment coefficients with
regard to the angle of attack. An example of this linear regression for the coefficient of lift
is displayed in Figure 1.3.
17

Figure 1.3: Linear Regression of Wind Tunnel Data [15]
1.7.3 High-Fidelity CFD Methodology
The Computational Fluid Dynamics methodology to obtain the variation of the coef-
ficients of lift and moment is very similar to the methodology of experimental or wind
tunnel testing. A finite volume model is generated to reproduce the testing environment
and aircraft geometry that is tested in the wind tunnel. To increase efficiency and reduce
the computational time required to obtain convergence of the CFD simulation, a half-model
of the aircraft is used. Once the model has been created, steady aerodynamic analysis is
performed by means of a Euler CFD code. This type of code, neglecting viscosity, does
not require a model accuracy capable of capturing the boundary layer, thus producing the
mesh is much easier.
Again, similar to the wind tunnel method, the model is divided into portions that
coincide with the DLM. This way the data obtained is easily comparable with DLM results.
Additionally, the aerodynamic data obtained can be easily transferred to the aeroelastic
solver that is configured to accept DLM data. As with the wind tunnel data reduction, the
CFD analysis must be performed within the linear regime of aerodynamic loads; this is
usually confined to angles of attack between −5◦ and 5◦.
18

Chapter 2
Transpiration Boundary Condition
The Transpiration Method was described theoretically in the previous Chapter. The
following will describe the methodology utilized to implement the Transpiration Boundary
Conditions for both steady and unsteady simulations. This chapter also describes, briefly,
the approach used to process the outputs of the simulations. It references the scripts and
files used in the appropriate appendices.
2.1 Undeflected Aerodynamics
The first step in performing the Transpiration Method is to determine a base set of
aerodynamic data for the model to be studied. This entails running a simulation on the
same model as the desired one to be studied, however, at an undeflected or unmodified
state. This simulation must be run at the same conditions as the desired simulation. From
this base simulation, the velocities on the surface are used in Equation (1.15), along with
the deformed normals of the desired deflected model to produce the Transpiration Velocities.
These velocities are then applied to the boundary conditions of the model to simulate a
deflected state. This will be described in the following sections.
19

2.2 Deflection of the Model
In order to determine the deflected state of the model, the natural modes of the model
are calculated using a structural solver. For this thesis MSC/NASTRAN was used. A
structural model was created with the same families as the aerodynamic model, that is,
both models were divided into the same planar divisions. Once the natural modes of the
model had been calculated, the eigenvectors were then used to define the new deflected
model. This was done using a MATLAB script (found in Appendix A.1) which would
output a file of the deflected points of the model that could then be read by another script.
2.3 Natural Mode Shapes
As previously stated, the natural modes of the structure needed to be calculated using
the structural solver in NASTRAN. These modes then needed to be verified. For the model
used in this research there are several sources of validation, as the model used was the
benchmark case of the AGARD 445.6 standard aeroelastic configuration wing model. The
mode shapes of the model can be seen in Figure 2.1 as taken from the work of Yates [10].
It can been seen in Figure 2.1 that the first mode is almost purely bending. This pure
bending is defined by the increase in displacement away from the wing root progressing
along to the tip. There is little torsion in this first mode, however, this can be influenced by
changing the stiffness of the wing structure. For modes 2 and 3, there is also the influence
of twisting.
All of the extracted modes were quantified by the associated eigenvectors and natural
frequencies. These eigenvectors provided the information needed to define the boundary
conditions for the transpiration method, which is described in the next section.
20

Figure 2.1: Natural Mode Shapes of AGARD Wing [10]
21
2.4 Defining the Boundary Conditions
In order to define the boundary conditions for the Transpiration Method another
MATLAB script was written. This can be found in Appendix A.2. This script reads the
undeflected points of the model, as well as the deflected points of the model, to produce the
new deflected surface normals. Using these normals, along with the undeflected aerodynamic
data in Equation (1.15), the transpiration velocities were defined. This could be done for
any of the natural modes of the model simply by choosing the desired eigenvectors. This
enabled the ability to perform several simulations at any number of deflected states with
minimal effort. These transpiration velocities were then output in a manner which could
be read by the computation fluid dynamic solver to define the boundary conditions of the
simulation.
2.5 Computational Fluid Dynamic Simulations
Once the transpiration velocities, and hence new boundary conditions, were defined,
they were transferred to the CFD solver. For this research Metacomp’s CFD++ was the
solver that was used. The simulation was run at the same conditions as the undeflected
case. The results of the steady simulation validation can be found in the following Chapter.
Once the undeflected simulation is complete, and initial setup of the deflected simulation
is complete, several simulations, all with different simulated deflections, can be performed
by simply providing CFD++ with modified transpiration boundary conditions. No further
setup is required, hence several simulations can be set up and completed with very little
setup time.
22
2.6 Unsteady Considerations
In order to perform an unsteady simulation, one that would be needed for such calcu-
lations as a flutter analysis, the boundary conditions needed to be defined at every time
step. This was done in a similar manner to the steady boundary conditions, where the
eigenvectors were used to deflect the model. To account for the model deflecting with time,
two methods were explored. The first method involved the magnitude of the transpiration
velocities which were applied to the surface of the model being scaled from zero magnitude
to maximum value at a specific frequency. This frequency corresponds to the natural
frequency of the natural mode of which the model was deflected. Hence, for Mode 1, or
First Bending, the model was deflected in this mode and the velocities varied at the first
natural frequency of the model.
The second method involved scaling the eigenvectors from zero to maximum magnitude
at the natural frequency of the natural mode of which the model was deflected. Then, using
the scaled eigenvectors at each time step, the transpiration velocities were calculated and
were applied as the boundary conditions for the corresponding time step.
This second method was determined to be a more accurate representation of the actual
deflection of the model. This is due to the fact that for the first method, it is assumed that
the transpiration velocities vary linearly with the deflection of the model. This is not the
case, and as such, calculating the transpiration velocities based on modified eigenvectors
instead of scaled maximum transpiration velocities, was chosen as the method to perform
the unsteady simulations.
23
2.7 Processing Simulation Results
User defined probes at locations along the surface of the wing were created. Within
CFD++ it is possible to define a probe location which records all the primitive variables in
the simulation at each time step and writes them to a single file. This file was read by a
MATLAB script and the data was processed using the Fast Fourier Transform, as described
in section 1.3. This script can be found in Appendix A.3.
Once this was complete, the results were used to replace the aerodynamic data obtained
by the DLM used in the structural solver to perform aeroelastic flutter analysis.
2.8 Implementation of High-Fidelity CFD Data into NAS-
TRAN
As mentioned in the previous section, once the simulation results were processed they
were then used to replace the aerodynamic data produced by the DLM. Replacing the DLM
data was done by manipulating the aerodynamic matrices NASTRAN uses to calculate its
flutter results. This method is explained in detail in Chapter 4.
24

Chapter 3
Validation of the Transpiration
Method
The validation of the Transpiration Method was done by means of two test cases.
The two cases were run at steady condition in order to first validate the ability of the
Transpiration Method in simulating deflections. The first was the BACT Wing with a
deflected trailing edge flap, and the second was a deflected AGARD 445.6 Wing. The two
cases are described below.
3.1 BACT Wing
The first validation test case was the Benchmark Active Controls Technology (BACT)
Wing, developed by The Structural Division of NASA Langley Research Centre’s Benchmark
Models Program. The dimensions of the BACT wing, along with the placement of the
control surfaces can be seen in Figure 3.1 and have been taken from Reference [5].
There are three control surfaces on the wing, a trailing edge flap and an upper and
lower surface spoiler. The control surfaces are centred along the 60% span, and are 30%
25

Figure 3.1: BACT Wing Model Dimensions [5]
the wing span. The trailing edge flap has a width of 25% the wing chord. The airfoil of the
BACT wing is the NACA 0012 symmetric airfoil.
In order to compare the transpiration method, an actually deflected trailing edge flap was
modelled. The two meshes are compared in Figures 3.2a and 3.2b. Both meshes contained
on the order of 1, 600, 000 tetrahedral cells, with concentration of the mesh at the trailing
edge flap. The increased number of cells is to improve the precision of the simulations and
to capture the flow conditions imposed by the trailing edge flap. This number is much
larger than other studies done using this method, as in reference [5], however with the
computational resources available the time required to run the simulations was not an issue.
It can be seen in Figures 3.2a and 3.2b that the deflection of the flap is significant,
at 10◦. This is to demonstrate the ability of the transpiration method to simulate large
deflections.
The simulation was executed at Mach 0.77 with the wing at an angle of attack of 0◦
and the trailing edge flap at 10◦ (downward) deflection, to match with the simulations
26

(a) Actual (b) Simulated
Figure 3.2: Deflected Trailing Edge Flap
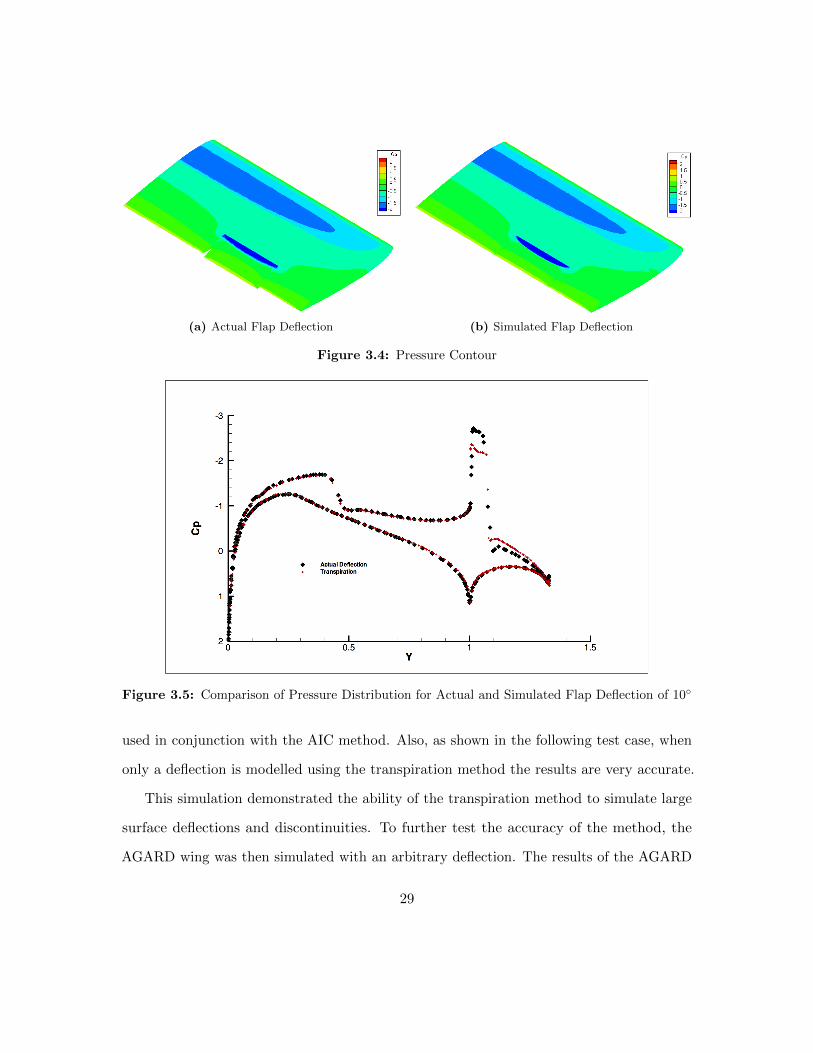
performed in reference [5]. The results of the two simulations can be seen in Figures 3.4a
and 3.4b.
In order to ensure the convergence of the simulations, the residuals were monitored
throughout the simulations. The simulation was considered to have converged to an
acceptable level once the residuals had decreased by five orders of magnitude. The solution
residuals for the momentum are shown in Figure 3.3, for both the actually deflected flap
simulation and the transpiration method simulation, to illustrate this point. As a note,
the residuals shown are relative values, showing the five order of magnitude drop, not the
absolute values of the residuals.
Qualitatively the two pressure contours show very good agreement. This is further
illustrated by means of a comparison of the pressure distribution at a cut located at the
60% span of the wing. This is shown in Figure 3.5 below.
Figure 3.5 shows excellent agreement between the actual and simulated flap deflection,
with the only discrepancy being noted at the interface of the control surface and the wing.
This discrepancy was also noted in reference [5] and was thought to be caused by the sudden
change in geometry at the flap interface. Reference [5] stated that the fact that a Euler
solver is used for the simulation it would not be expected that any separation and boundary
27

0 50 100 150 200 25010
0
101
102
103
104
105
106
Iteration
Resid
ual
Transpiration
0 200 400 60010
−1
100
101
102
103
104
105
106
Iteration
Resid
ual
Actual Deflection
x−momentum
y−momentum
z−momentum
x−momentum
y−momentum
z−momentum
Figure 3.3: Convergence of Solution Residuals - BACT Wing
layer-shock interactions caused by the large surface deflection, would be detected. That is
to say that the transpiration method is only as accurate as the limitations of the inviscid
assumptions applied to the method.
One other explanation for the discrepancy at the control surface interface, is that the
transpiration method, as applied here, is applied to a set of panels on the control surface,
whereas in other research [5], [3], [4] it was applied to every node. This was not possible
with the tools presently in use, and was not considered to be necessary as the point of the
BACT test case was to determine if the transpiration method showed the potential to be
28
(a) Actual Flap Deflection (b) Simulated Flap Deflection
Figure 3.4: Pressure Contour
Figure 3.5: Comparison of Pressure Distribution for Actual and Simulated Flap Deflection of 10◦
used in conjunction with the AIC method. Also, as shown in the following test case, when
only a deflection is modelled using the transpiration method the results are very accurate.
This simulation demonstrated the ability of the transpiration method to simulate large
surface deflections and discontinuities. To further test the accuracy of the method, the
AGARD wing was then simulated with an arbitrary deflection. The results of the AGARD
29
wing simulations are shown in the following section.
3.2 AGARD Wing
The second test case was the AGARD 445.6 Wing. This is a standard aeroelastic test
case and serves as a good reference for the current application of the Transpiration Method.
The AGARD 445.6 Wing in this study is defined by a half span of 2.5ft, a root chord of
1.833ft and a tip chord of 1.208 ft. The quarter-chord sweep angle is 45◦ with the elastic
axis sweep angle at 43.15◦. These dimensions can be seen in Figure 3.6 and have all been
taken from Reference [10].
The airfoil of the AGARD wing was a constant NACA 65A004 profile. As with the
BACT wing, two simulations were completed to test the validity of the transpiration method
for steady flows. The first being an actually deflected wing, whereas the second had the
transpiration boundary condition applied. These two models, with their respective meshes
are shown in Figures 3.7a and 3.7b.
The simulation for the AGARD wing was executed at Mach 0.687 with the wing at
an angle of attack of 0◦. The results of the pressure contours of the two simulations can
be seen in Figures 3.9a and 3.9b. Again, the residuals of the simulation were monitored
to ensure the convergence of the solution. As with the BACT simulations, the AGARD
solution was accepted once the residuals had decreased by five orders of magnitude. The
residuals of the AGARD simulations - both the actually deflected and transpiration - can
be seen in Figure 3.8. Again, the residuals shown are the relative values showing the five
order of magnitude drop.
Again, as with the BACT wing simulations, the two results show acceptable agreement.
This is better illustrated with a comparison of the pressure distribution at a cut located at
the 60% span of the wing. This is shown in Figure 3.10.
30

Elastic axis
Quarter-chord line
2.5
1.208
45°
43.15°
1.833
Figure 3.6: AGARD Wing Model Dimensions
Once again, with the simulation of an arbitrarily deflected AGARD wing, the transpi-
ration method has shown to provide well matching results when compared to an actually
deflected model. The final validation case was to apply this method to the Global Express
wing. The results from this test were not as good as the previous cases, however, the trends
suggested that the method would perform well if more time was spent refining the model
31

(a) Actual (b) Simulated
Figure 3.7: AGARD Wing
0 20 40 60 80 10010
0
101
102
103
104
105
Iteration
Resid
ual
Transpiration
0 20 40 60 80 10010
0
101
102
103
104
105
106
Iteration
Resid
ual
Actual Deflection
x−momentum
y−momentum
z−momentum
x−momentum
y−momentum
z−momentum
Figure 3.8: Convergence of Solution Residuals - AGRAD Wing
32

(a) Actual (b) Simulated
Figure 3.9: Pressure Contour for Deflection of AGARD Wing
+
+
+++
++
++
++
+++++
+
++++
+
+
+
+++
+
++
+
+++
++
+++
++++++
+
+++++++ ++++ +++ + +++
++++++++ ++ + ++ +++ ++ ++++ ++++++ + +++ ++ + ++
++ ++++ +++++
+++ + ++++++
+++ +++++
+++++++++
+ + ++ + ++ ++ +++
++++
+++
+ + ++ ++ + + + + ++++ + ++ +++++ +
+++++ + +++ +++++ +++++++++++++
+
++
+
+
++
++++
+
++
+++
++
+++
+++
++++
+++++++++++
+++++++
++++++++
+++++
+ ++++++ ++++++
+ +++ +++ + ++++++ ++ ++ + + ++++ ++ +++ +++++ +
+++ ++++ ++++ +++ ++ +++ + + +++ ++ + + + ++ ++ + + ++ ++++ ++
++ + +++++++ + ++ ++ ++++ + +++ ++ ++ +++ ++++++++++
++++++++
X
Cp
1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3 3.2
2
1.5
1
0.5
0
0.5
1
1.5
Actually DeflectedTranspiration+
Figure 3.10: Comparison of Pressure Distribution for Actual and Simulated Deflection of AGARDWing
and technique for this case. This was forgone in respect to time constraints of this research.
The results obtained from the steady validation cases provided sufficient information
that this method is suitable for the use of deforming the aerodynamic model at each time
step in an unsteady simulation. The results of unsteady simulations of an AGARD wing
experiencing flutter are presented in section 5.2
33

Chapter 4
Modal Based AIC Method in
NASTRAN
In order to incorporate the modal-based AIC method into an aeroelastic solver it must
be redefined from its purely aerodynamic development. This aerodynamic development was
described in section 1.5. As mentioned in previous sections, the aeroelastic solver used in
this thesis for the structural calculations is NASTRAN. Using the definition of aerodynamic
matrices, shown in section 1.2.3, the modal-based AIC method is defined for use with
NASTRAN.
4.1 Background
This method begins with the definition of the generalized aerodynamic matrix, [Qhh],
which describes the aerodynamics of the model. This is shown below as Equation (4.1),
now renamed from the original Equation (1.6) to match the naming convention used within
NASTRAN.
[Qhh] = [φgh]T [Gkg]T [WTFACT ] [Qkk] [Gkg] [φgh] (4.1)
34

This generalized aerodynamic matrix is an essential part of the flutter analysis and
calculations performed by NASTRAN. This generalized aerodynamic matrix is the matrix to
be altered by the modal-based AIC method to in turn alter the flutter results for a different
modal configuration. Within the generalized aerodynamic matrix is the aerodynamic
influence matrix, [Qkk]. This matrix was previously defined as Equation (1.5). This matrix
is formed in NASTRAN and is explained in section 1.2.3.
This AIC matrix can then be multiplied by the interpolated mode shapes, represented
by the combination of the Interpolation Matrix [Gkg], and the Normal mode vectors [φgh].
This then produces a new matrix, [Qkh] and is shown in Equation (4.2) below:
[Qkh] = [Skj ] [Ajj ]−1 [Djk
1 + ikDjk2]
[Gkg] [φgh] (4.2)
This [Qkh] matrix contains the information of the variation of lifts, ∆Cl and moments,
∆Cm on each aerodynamic panel for each of the chosen h modes. It is then possible to collect
this same data from high-fidelity CFD solvers and replace this data which is calculated
using the DLM with the goal of providing more accurate aerodynamic data and hence
producing more accurate aeroelastic results and analysis.
It is also possible to use the [Qjh] matrix, which contains information on the variation
of pressure ∆Cp, on each of the aerodynamic panels, however, it was determined in previous
research [15] that the use of the [Qkh] matrix is the optimal method to transfer the high-
fidelity CFD data to NASTRAN, and as so the [Qkh] matrix is also used in this research.
The [Qjh] matrix is defined below for reference in Equation (4.3).
[Qjh] = [Ajj ]−1 [Djk
1 + ikDjk2]
[Gkg] [φgh] (4.3)
In a similar manner to that described in section 1.5, the [Qkh] can be used in place of the
35

∆Cp vector, along with the Normal mode vectors [φgh] to produce the following equation.
[Qkh] = [Qkg] [φgh] (4.4)
Within this equation the modal-based AIC matrix is defined. To remain consistent with
the NASTRAN naming convention, it is called the [Qkg] matrix. This [Qkg] matrix is the
aerodynamic base for all configurations of the model. This aerodynamic base can then be
used in a similar manner to that developed by Chen et al. [16]. The [Qkg] matrix, which is
the base for all model configurations, and hence remains constant for all configurations,
can then be used in combination with other configuration’s mode shapes to produce the
variation of lifts and moments on each of the aerodynamic panels for the new configuration.
In order to calculate this aerodynamic base, the [Qkh] matrix is used along with the
Normal mode vectors [φgh]. This is where the aerodynamic base, [Qkg] matrix will be
modified with the high-fidelity CFD data through the [Qkh] matrix. This is done by means
of the least-square procedure outlined in section 1.5. The equation for the aerodynamic
base of configuration 1 is then
[Qkg]1 = [Qkh]1
[(φgh
Tφgh)−1
φghT]1
(4.5)
The accuracy of the calculated aerodynamic base, [Qkg] is obviously dependant on the
accuracy of the lifts and moments given in the [Qkh] matrix and the number of mode shapes
used in the Normal mode vector [φgh].
Now, using this newly calculated aerodynamic base, which incorporates the high-fidelity
CFD data, the lifts and moments can be calculated for a second configuration of the model,
36

given the new configuration’s Normal mode vector [φgh]2, through:
[Qkh]2 = [Qkg]1[φgh]2 (4.6)
Finally, this [Qkh]2 matrix can be used in Equation (4.1), rewritten as Equation (4.7)
below, to calculate the new flutter results of configuration 2, or any desired configuration.
[Qhh]2 = [φgh]T [Gkg]T [WTFACT ] [Qkh]2 (4.7)
The weighting factor, [WTFACT ], as previously explained, is needed if only steady
aerodynamic analysis is completed using high-fidelity CFD. As both steady and unsteady
aerodynamic analyses were performed in this research this weighting factor is not needed.
4.2 Lifts and Moments
In order to validate the accuracy of the modal-based AIC method described in the
previous section, a comparison of the lifts and moments, or rather the variation of lifts and
moments, ∆Cl and ∆Cm respectively, was undertaken between the results generated by the
method and the results generated by the Doublet Lattice Method within NASTRAN. This
was first done for the steady simulations. This was also completed to validate the work
done previously [15].
The validation the modal-based AIC method for steady simulations was done by choosing
two configurations of the AGARD wing model. These configurations differed by the stiffness
of the model, and hence the mode shapes and natural frequencies of the two configurations
were different. Then, using NASTRAN the aerodynamic data was produced by means of
the DLM for the two configurations. This aerodynamic data was extracted for the first
four natural modes of the wing. The first four modes shapes were chosen as the base for
37

the modal-based AIC method as they were found to have the greatest influence on the
wing flutter mechanism, this was also noted in previous research [15]. With the DLM
aerodynamic data extracted from the four base modes, the [Qkh] matrix could then be
modified as stated in Equation (4.6) to produce the second configuration’s change in lift
and moments.
The results of the steady simulations as applied to the modal-based AIC method can be
seen in the Figures 4.1 through 4.8 as the real lifts and moments for the first four natural
modes are plotted. The figures show three cuts along the span of the AGARD wing, one
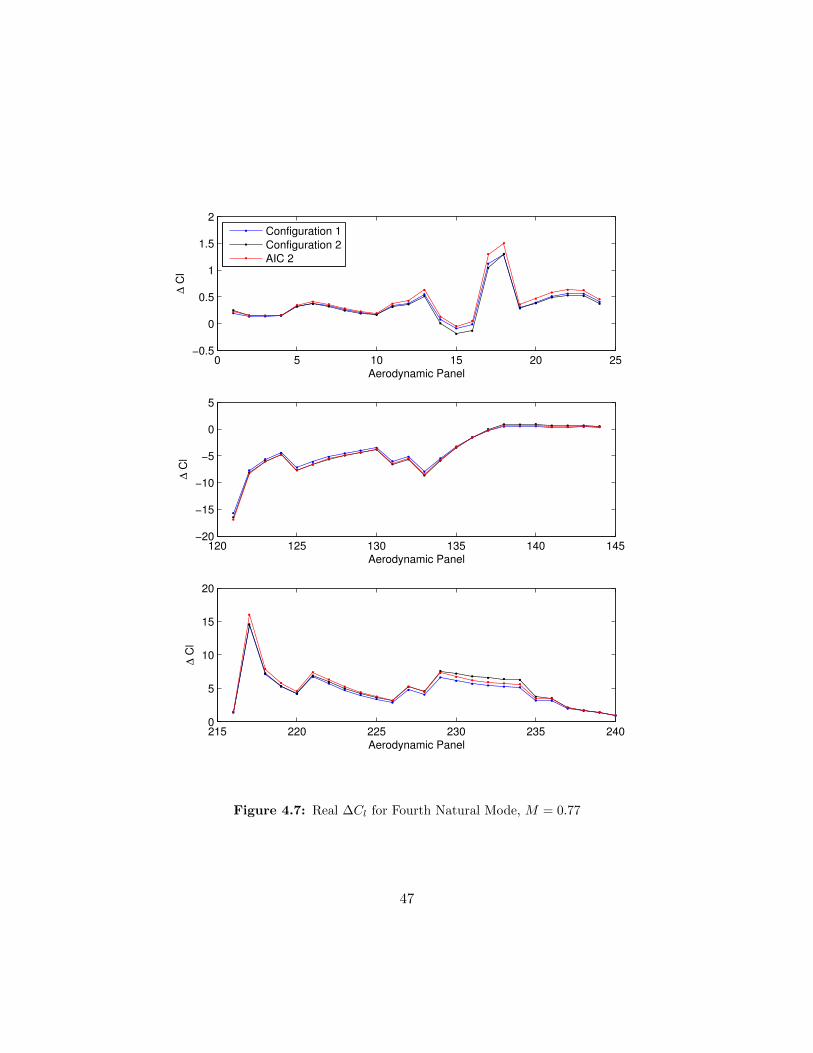
at the root, one at the centre and finally one at the tip. The wing was divided into 240
panels numbered 1 to 240 starting at the leading edge root to the trailing edge tip of the
wing. In all of the following figures the two actually deflected configurations of the AGARD
wing are denoted as Configuration 1 and Configuration 2, respectively, whereas the AIC
approximation of the second configuration of the AGARD wing is denoted as AIC 2. This
is to not over crowd the legends in the figures.
It can be seen in Figures 4.1 and 4.2 that for the first natural mode the modal-based
AIC approximation of the second configuration is very close. There is little difference
between the high-fidelity CFD results for the second natural mode and the modal-based
AIC approximation.
For the second natural mode, shown in Figures 4.3 and 4.4, the results are also close.
With the agreement between the AIC approximation and the actual high-fidelity CFD being
acceptable. This trend continues in with the third mode in Figures 4.5 and 4.6.
The agreement between the two methods is still very good for the third natural mode.
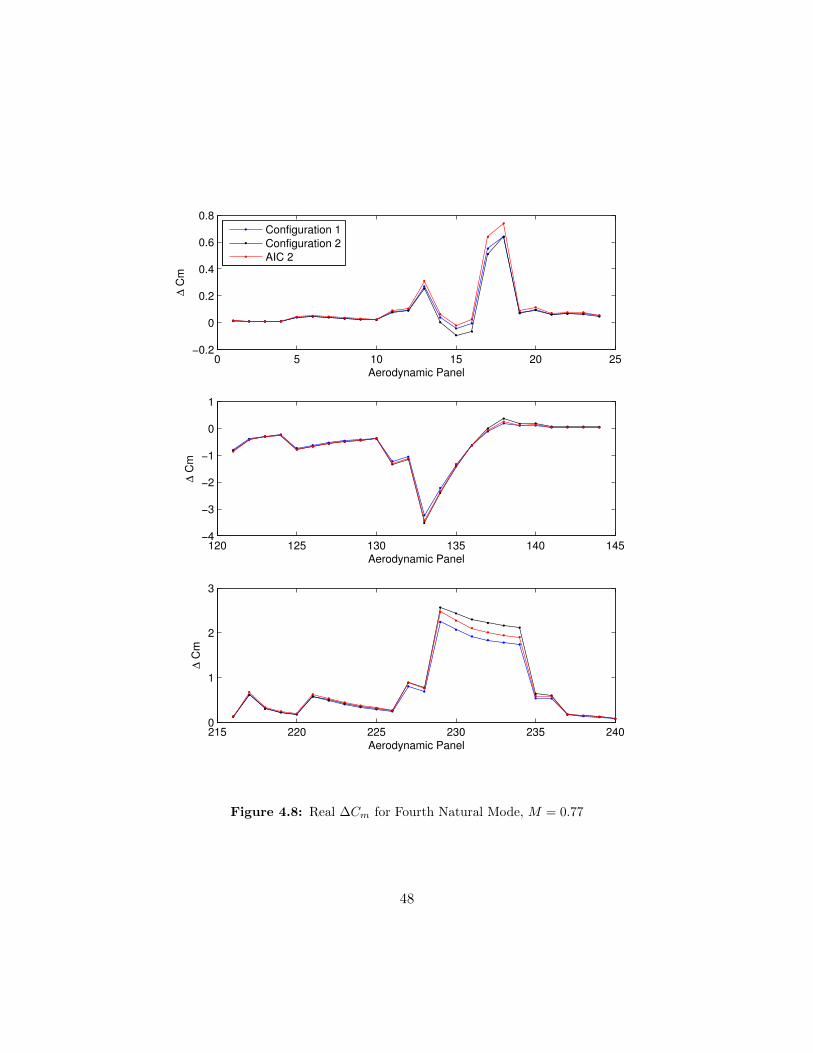
The results of the fourth natural mode are shown in Figures 4.7 and 4.8. Here it can be
seen that the agreement between the high-fidelity CFD results and the AIC approximation
is not as good as the previous modes. It can be seen in Figure 4.7 that the approximation
38

of lifts near the root of the wing shows a large discrepancy, but the approximation improves
as one moves along the wing. The change in moments, in Figure 4.8 show the same trend
as the lifts, giving a poor approximation near the root. This discrepancy is due to the
fact that only four modes were used to produce the modal-based AIC matrix, [Qkg]. As
described in Equation (4.5) the accuracy of the approximation is directly affected by the
number of modes used. This was discussed in depths in Reference [15].
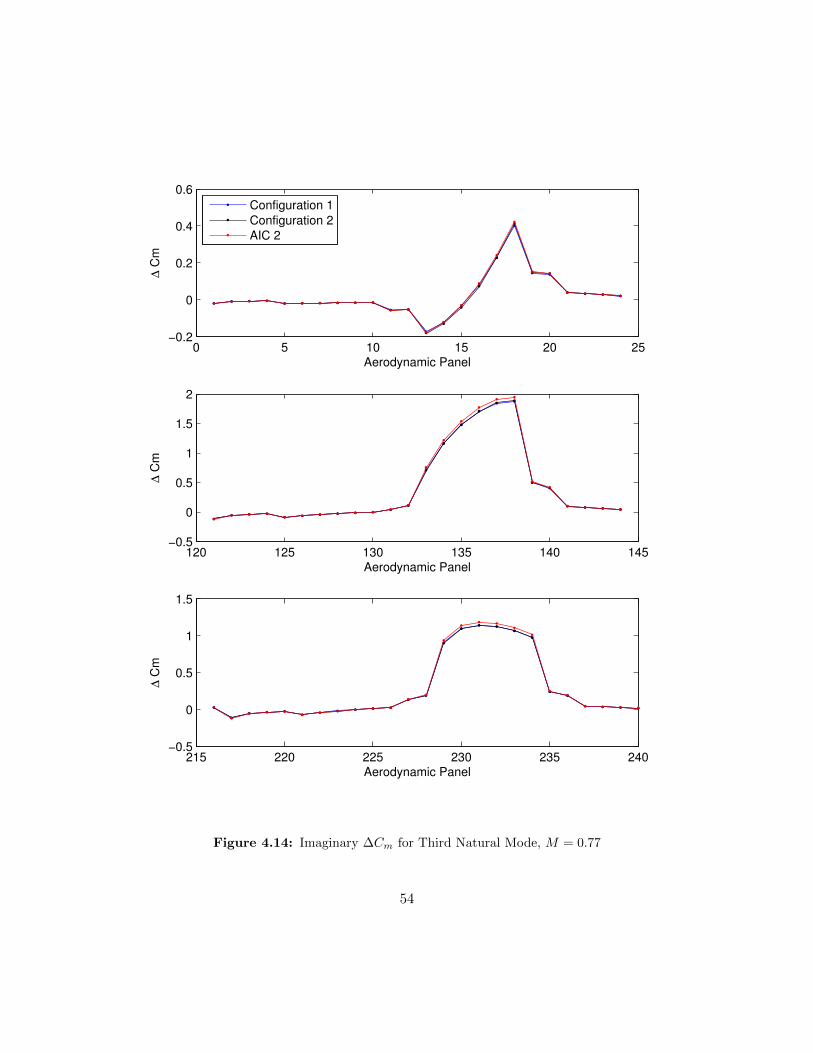
4.3 Unsteady Lifts and Moments
The next part of the validation of the modal-based AIC method was to evaluate the
unsteady, or imaginary changes in lifts and moments. This was done by comparing the
imaginary parts of the change in lift and moment coefficient similar to the method used
for the steady, or real, lift and moment comparison. The same two configurations of the
AGARD wing were chosen and the modal-based AIC method was used to modify the [Qkh]
matrix. The results and comparison of the modal-based AIC can be seen in the Figures 4.9
through 4.16.
It can be seen in the figures above that the comparison of the unsteady modal-based
AIC method to the DLM results show satisfactory agreement. This is similar to the steady
comparison. The only major deviation in the comparison is once again at the root of the
wing for the fourth mode. This is again explained by the fact that only four modes were
used when constructing the aerodynamic base for the method as explained in detail in
Reference [15].
The results of both the steady and unsteady AIC approximations show that the modal-
based AIC method is suitable for approximating different aircraft configurations. The goal
of this research was not to prove the validity if this method, as that was studied extensively
in Reference [15], but to study the effect of adding unsteady aerodynamic data to the
39

modal-based AIC method. This is true for the addition of high-fidelity CFD data to the
method as well.
40

0 5 10 15 20 25−1
−0.5
0
0.5
Aerodynamic Panel
∆ C
l
Configuration 1
Configuration 2
AIC 2
120 125 130 135 140 145−4
−3
−2
−1
0
Aerodynamic Panel
∆ C
l
215 220 225 230 235 240−6
−4
−2
0
Aerodynamic Panel
∆ C
l
Figure 4.1: Real ∆Cl for First Natural Mode, M = 0.77
41

0 5 10 15 20 25−0.6
−0.4
−0.2
0
0.2
Aerodynamic Panel
∆ C
m
Configuration 1
Configuration 2
AIC 2
120 125 130 135 140 145−1.5
−1
−0.5
0
Aerodynamic Panel
∆ C
m
215 220 225 230 235 240−0.5
−0.4
−0.3
−0.2
−0.1
0
Aerodynamic Panel
∆ C
m
Figure 4.2: Real ∆Cm for First Natural Mode, M = 0.77
42

0 5 10 15 20 25−1.5
−1
−0.5
0
Aerodynamic Panel
∆ C
l
120 125 130 135 140 1450
2
4
6
8
Aerodynamic Panel
∆ C
l
215 220 225 230 235 2400
5
10
15
20
Aerodynamic Panel
∆ C
l
Configuration 1
Configuration 2
AIC 2
Figure 4.3: Real ∆Cl for Second Natural Mode, M = 0.77
43

0 5 10 15 20 25−0.8
−0.6
−0.4
−0.2
0
Aerodynamic Panel
∆ C
m
120 125 130 135 140 1450
1
2
3
Aerodynamic Panel
∆ C
m
215 220 225 230 235 2400
0.5
1
1.5
2
Aerodynamic Panel
∆ C
m
Configuration 1
Configuration 2
AIC 2
Figure 4.4: Real ∆Cm for Second Natural Mode, M = 0.77
44

0 5 10 15 20 250
5
10
15
20
Aerodynamic Panel
∆ C
l
120 125 130 135 140 1450
10
20
30
40
50
Aerodynamic Panel
∆ C
l
215 220 225 230 235 240−20
0
20
40
60
80
Aerodynamic Panel
∆ C
l
Configuration 1
Configuration 2
AIC 2
Figure 4.5: Real ∆Cl for Third Natural Mode, M = 0.77
45

0 5 10 15 20 250
2
4
6
8
10
Aerodynamic Panel
∆ C
m
120 125 130 135 140 1450
5
10
15
20
Aerodynamic Panel
∆ C
m
215 220 225 230 235 240−2
0
2
4
6
8
Aerodynamic Panel
∆ C
m
Configuration 1
Configuration 2
AIC 2
Figure 4.6: Real ∆Cm for Third Natural Mode, M = 0.77
46
0 5 10 15 20 25−0.5
0
0.5
1
1.5
2
Aerodynamic Panel
∆ C
l
120 125 130 135 140 145−20
−15
−10
−5
0
5
Aerodynamic Panel
∆ C
l
215 220 225 230 235 2400
5
10
15
20
Aerodynamic Panel
∆ C
l
Configuration 1
Configuration 2
AIC 2
Figure 4.7: Real ∆Cl for Fourth Natural Mode, M = 0.77
47
0 5 10 15 20 25−0.2
0
0.2
0.4
0.6
0.8
Aerodynamic Panel
∆ C
m
120 125 130 135 140 145−4
−3
−2
−1
0
1
Aerodynamic Panel
∆ C
m
215 220 225 230 235 2400
1
2
3
Aerodynamic Panel
∆ C
m
Configuration 1
Configuration 2
AIC 2
Figure 4.8: Real ∆Cm for Fourth Natural Mode, M = 0.77
48

0 5 10 15 20 25−0.2
−0.15
−0.1
−0.05
0
0.05
Aerodynamic Panel
∆ C
l
Configuration 1
Configuration 2
AIC 2
120 125 130 135 140 145−1
−0.8
−0.6
−0.4
−0.2
0
Aerodynamic Panel
∆ C
l
215 220 225 230 235 240−1.5
−1
−0.5
0
Aerodynamic Panel
∆ C
l
Figure 4.9: Imaginary ∆Cl for First Natural Mode, M = 0.77
49

0 5 10 15 20 25−0.1
−0.08
−0.06
−0.04
−0.02
0
Aerodynamic Panel
∆ C
m
Configuration 1
Configuration 2
AIC 2
120 125 130 135 140 145−0.4
−0.3
−0.2
−0.1
0
Aerodynamic Panel
∆ C
m
215 220 225 230 235 240−0.25
−0.2
−0.15
−0.1
−0.05
0
Aerodynamic Panel
∆ C
m
Figure 4.10: Imaginary ∆Cm for First Natural Mode, M = 0.77
50

0 5 10 15 20 25−0.5
−0.4
−0.3
−0.2
−0.1
0
Aerodynamic Panel
∆ C
l
120 125 130 135 140 145−2
−1
0
1
Aerodynamic Panel
∆ C
l
215 220 225 230 235 240−0.5
0
0.5
1
1.5
Aerodynamic Panel
∆ C
l
Configuration 1
Configuration 2
AIC 2
Figure 4.11: Imaginary ∆Cl for Second Natural Mode, M = 0.77
51

0 5 10 15 20 25−0.25
−0.2
−0.15
−0.1
−0.05
0
Aerodynamic Panel
∆ C
m
120 125 130 135 140 145−0.4
−0.2
0
0.2
0.4
Aerodynamic Panel
∆ C
m
215 220 225 230 235 240−0.1
0
0.1
0.2
0.3
0.4
Aerodynamic Panel
∆ C
m
Configuration 1
Configuration 2
AIC 2
Figure 4.12: Imaginary ∆Cm for Second Natural Mode, M = 0.77
52

0 5 10 15 20 25−0.5
0
0.5
1
Aerodynamic Panel
∆ C
l
120 125 130 135 140 145−4
−2
0
2
4
6
Aerodynamic Panel
∆ C
l
215 220 225 230 235 240−4
−2
0
2
4
Aerodynamic Panel
∆ C
l
Configuration 1
Configuration 2
AIC 2
Figure 4.13: Imaginary ∆Cl for Third Natural Mode, M = 0.77
53
0 5 10 15 20 25−0.2
0
0.2
0.4
0.6
Aerodynamic Panel
∆ C
m
120 125 130 135 140 145−0.5
0
0.5
1
1.5
2
Aerodynamic Panel
∆ C
m
215 220 225 230 235 240−0.5
0
0.5
1
1.5
Aerodynamic Panel
∆ C
m
Configuration 1
Configuration 2
AIC 2
Figure 4.14: Imaginary ∆Cm for Third Natural Mode, M = 0.77
54

0 5 10 15 20 250
0.1
0.2
0.3
0.4
0.5
Aerodynamic Panel
∆ C
l
120 125 130 135 140 145−2
−1
0
1
Aerodynamic Panel
∆ C
l
215 220 225 230 235 240−0.5
0
0.5
1
1.5
2
Aerodynamic Panel
∆ C
l
Configuration 1
Configuration 2
AIC 2
Figure 4.15: Imaginary ∆Cl for Fourth Natural Mode, M = 0.77
55

0 5 10 15 20 250
0.05
0.1
0.15
0.2
0.25
Aerodynamic Panel
∆ C
m
120 125 130 135 140 145−0.8
−0.6
−0.4
−0.2
0
0.2
Aerodynamic Panel
∆ C
m
215 220 225 230 235 240−0.2
0
0.2
0.4
0.6
Aerodynamic Panel
∆ C
m
Configuration 1
Configuration 2
AIC 2
Figure 4.16: Imaginary ∆Cm for Fourth Natural Mode, M = 0.77
56

Chapter 5
Validation of High-Fidelity CFD
Results
The aerodynamic information used in the flutter analysis is produced using the Doublet
Lattice Method, which is incorporated into the structural solver. As stated, for this thesis
the structural solver used was NASTRAN. This DLM aerodynamic information is to be
replaced by that of high fidelity CFD data. This is done through the variation of lifts
and moments produced by the deflection of the structure by its natural modes. This was
explained in the previous Chapter. In order to obtain these variations, the model must be
deformed by the natural modes and the pressure distributions must be compared to that
of the undeflected structure to obtain the ∆Cl and ∆Cm which are included in the [Qkh]
matrix.
5.1 Defining the Deflected Model
In order to obtain the deformed shape of the structure a modal analysis of the structure
must first be performed. This was done using NASTRAN. First the structure was modelled
57

as a two dimensional structure with the same divisions as the high fidelity CFD model.
This 2D model was then analyzed and the natural modes were extracted. This included the
eigenvectors for the deflections of each mode. Once these eigenvectors were calculated they
were then used in a MATLAB script to deflect the CFD model and create the transpiration
method boundary conditions. This was all done in a similar manner to that explained in
Chapter 2.
5.2 Results and Comparison to DLM
The high-fidelity CFD results produced by the transpiration method were compared
to those of the DLM to ensure that the method was at least as good as present method
for aerodynamic analysis. This was done for both steady and unsteady simulations. For
comparison of the steady simulations the change in lift and moment coefficient between
the undeflected and deflected structure for each of the different modes along the span
of the wing was compared. Also, the variation of lift and moment at each aerodynamic
panel was compared. For the unsteady simulations, the comparison was made for the real
and imaginary change in lift and moment. These results for both steady and unsteady
simulations can be seen in the following sections.
5.2.1 Steady Simulations
The steady simulations were validated against the results produced by means of the
DLM by plotting the variation of coefficient of lift, ∆Cl, and coefficient of moment, ∆Cm,
along the span of the wing, as well as for each aerodynamic panel, for the different modes
studied. As with the validation of the transpiration method performed in earlier sections,
the simulations were considered to have converged when the residuals had decreased by five
orders of magnitude. These results are shown in the Figures 5.1 through 5.8.
58

1 2 3 4 5 6 7 8 9 10−40
−35
−30
−25
−20
−15
−10
−5
∆ C
l
Wing Span
∆ Cl per strip for first natural mode at M=0.77
1 2 3 4 5 6 7 8 9 102
3
4
5
6
7
8
9
∆ C
m
Wing Span
∆ Cm per strip for first natural mode at M=0.77
High−Fidelity CFD
DLM
High−Fidelity CFD
DLM
Figure 5.1: Spanwise Comparison of high-fidelity CFD and DLM results for First Natural Mode,M = 0.77
0 50 100 150 200 250−6
−5
−4
−3
−2
−1
0
1
∆ C
l
Wing Span
∆ Cl per panel for first natural mode at M=0.77
0 50 100 150 200 250−0.5
0
0.5
1
1.5
∆ C
m
Wing Span
∆ Cm per panel for first natural mode at M=0.77
High−Fidelity CFD
DLM
High−Fidelity CFD
DLM
Figure 5.2: Panel Comparison of high-fidelity CFD and DLM results for First Natural Mode,M = 0.77
59

1 2 3 4 5 6 7 8 9 10−50
0
50
100
150
∆ C
l
Wing Span
∆ Cl per strip for second natural mode at M=0.77
1 2 3 4 5 6 7 8 9 10−30
−20
−10
0
10
20
∆ C
m
Wing Span
∆ Cm per strip for second natural mode at M=0.77
High−Fidelity CFD
DLM
High−Fidelity CFD
DLM
Figure 5.3: Spanwise Comparison of high-fidelity CFD and DLM results for Second Natural Mode,M = 0.77
0 50 100 150 200 250−5
0
5
10
15
20
∆ C
l
Wing Span
∆ Cl per panel for second natural mode at M=0.77
0 50 100 150 200 250−4
−3
−2
−1
0
1
2
3
∆ C
m
Wing Span
∆ Cm per panel for second natural mode at M=0.77
High−Fidelity CFD
DLM
High−Fidelity CFD
DLM
Figure 5.4: Panel Comparison of high-fidelity CFD and DLM results for Second Natural Mode,M = 0.77
60

1 2 3 4 5 6 7 8 9 10100
200
300
400
500
∆ C
l
Wing Span
∆ Cl per strip for third natural mode at M=0.77
1 2 3 4 5 6 7 8 9 10−120
−100
−80
−60
−40
∆ C
m
Wing Span
∆ Cm per strip for third natural mode at M=0.77
High−Fidelity CFD
DLM
High−Fidelity CFD
DLM
Figure 5.5: Spanwise Comparison of high-fidelity CFD and DLM results for Third Natural Mode,M = 0.77
0 50 100 150 200 250−10
0
10
20
30
40
50
60
∆ C
l
Wing Span
∆ Cl per panel for third natural mode at M=0.77
0 50 100 150 200 250−25
−20
−15
−10
−5
0
5
∆ C
m
Wing Span
∆ Cm per panel for third natural mode at M=0.77
High−Fidelity CFD
DLM
High−Fidelity CFD
DLM
Figure 5.6: Panel Comparison of high-fidelity CFD and DLM results for Third Natural Mode,M = 0.77
61

1 2 3 4 5 6 7 8 9 10−150
−100
−50
0
50
100
150
∆ C
l
Wing Span
∆ Cl per strip for fourth natural mode at M=0.77
1 2 3 4 5 6 7 8 9 10−30
−20
−10
0
10
20
30
∆ C
m
Wing Span
∆ Cm per strip for fourth natural mode at M=0.77
High−Fidelity CFD
DLM
High−Fidelity CFD
DLM
Figure 5.7: Spanwise Comparison of high-fidelity CFD and DLM results for Fourth Natural Mode,M = 0.77
0 50 100 150 200 250−20
−15
−10
−5
0
5
10
15
∆ C
l
Wing Span
∆ Cl per panel for fourth natural mode at M=0.77
0 50 100 150 200 250−4
−2
0
2
4
6
∆ C
m
Wing Span
∆ Cm per panel for fourth natural mode at M=0.77
High−Fidelity CFD
DLM
High−Fidelity CFD
DLM
Figure 5.8: Panel Comparison of high-fidelity CFD and DLM results for Fourth Natural Mode,M = 0.77
62

The results of the transpiration method compare well with the DLM results. There are
only minor differences in the change in lift and moment produced by the modal deflections.
There are some discrepancies with the lift and moment distribution along the span of the
wing. These discrepancies may be accounted for by the manner in which the two values
were computed, the DLM and high-fidelity CFD. The DLM may have not captured some
3D effects that the high-fidelity CFD was able to model. Also, at Mach of 0.77 it would not
be expected that shocks would form, however if this were the case then differences between
the two methods would be expected. This is something that will need to be examined more
thoroughly with more simulations. From the agreement between the two methods for the
change in lift and moment at each panel, in combination with the validation performed in
Chapter 3, it can be said that the transpiration method will provide suitable aerodynamic
results for use with the modal-based AIC method. This statement is further reinforced by
examining the unsteady simulation results presented in the next section.
5.2.2 Unsteady Simulations
The unsteady simulations were validated by comparison of the real and imaginary
components of lift and moment to those produced by the DLM. The real and imaginary
components of lift and moment were extracted in the manner explained in Section 1.3
for the high-fidelity CFD simulations. Once the high-fidelity CFD values were obtained,
the values from the DLM needed to be extracted. The DLM values were extracted from
NASTRAN by means of a DMAP alter, a subroutine that is added during flutter analysis
to output the [Qkh] matrix used in the flutter calculations. This is a matrix which is not
usually output by NASTRAN and as such is difficult to obtain. The convergence of the
unsteady simulations were monitored at each global time step. For each global time step
the simulation was run for 20 internal time steps. This allowed for the residuals to decrease
63

by at least one order of magnitude, however, it was usually two orders magnitude or more.
The results of the comparison between the high-fidelity CFD and DLM results for unsteady
components of lift and moments for the first four natural modes can be seen in the figures
below.
0 50 100 150 200 250−6
−5
−4
−3
−2
−1
0
1
∆ C
l
Wing Span
∆ Cl per panel for first natural mode at M=0.77
0 50 100 150 200 250−0.5
0
0.5
1
1.5
∆ C
m
Wing Span
∆ Cm per panel for first natural mode at M=0.77
High−Fidelity CFD
DLM
High−Fidelity CFD
DLM
Figure 5.9: Comparison of Real and Imaginary ∆Cl for First Natural Mode, M = 0.77
For the real and imaginary components of lift and moment there is a good agreement,
for the most part, between the transpiration method and the DLM. With large differences
being found only in Figures 5.13 and 5.14, the imaginary component of lift and moment for
mode 3 respectively. It appears as if there is an inflection in the lifts and moments that
does not appear in the DLM data. This inflection may be due to the way in which the mode
shapes were applied to the boundary conditions; further unsteady analysis is required.
As previously mentioned, the goal of this research was to incorporate unsteady aero-
dynamic data to the modal-based AIC method, not to prove the Transpiration method.
The Transpiration method was used for the unsteady aerodynamic calculations because
64

0 50 100 150 200 250−1.5
−1
−0.5
0
0.5
∆ C
m
Aerodynamic Panel
Real ∆ Cm per panel for first natural mode at M=0.77
0 50 100 150 200 250−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
∆ C
m
Aerodynamic Panel
Imaginary ∆ Cm per panel for first natural mode at M=0.77
High−Fidelity CFD
DLM
Figure 5.10: Comparison of Real and Imaginary ∆Cm for First Natural Mode, M = 0.77
0 50 100 150 200 250−10
−5
0
5
10
15
20
∆ C
l
Aerodynamic Panel
Real ∆ Cl per panel for second natural mode at M=0.77
0 50 100 150 200 250−2
−1
0
1
2
3
∆ C
l
Aerodynamic Panel
Imaginary ∆ Cl per panel for second natural mode at M=0.77
High−Fidelity CFD
DLM
Figure 5.11: Comparison of Real and Imaginary ∆Cl for Second Natural Mode, M = 0.77
65

0 50 100 150 200 250−1
0
1
2
3
4
5
∆ C
m
Aerodynamic Panel
Real ∆ Cm per panel for second natural mode at M=0.77
0 50 100 150 200 250−0.6
−0.4
−0.2
0
0.2
0.4
0.6
∆ C
m
Aerodynamic Panel
Imaginary ∆ Cm per panel for second natural mode at M=0.77
High−Fidelity CFD
DLM
Figure 5.12: Comparison of Real and Imaginary ∆Cm for Second Natural Mode, M = 0.77
0 50 100 150 200 250−20
0
20
40
60
80
∆ C
l
Aerodynamic Panel
Real ∆ Cl per panel for third natural mode at M=0.77
0 50 100 150 200 250−4
−2
0
2
4
6
8
∆ C
l
Aerodynamic Panel
Imaginary ∆ Cl per panel for third natural mode at M=0.77
High−Fidelity CFD
DLM
Figure 5.13: Comparison of Real and Imaginary ∆Cl for Third Natural Mode, M = 0.77
66

0 50 100 150 200 250−5
0
5
10
15
20
25
∆ C
m
Aerodynamic Panel
Real ∆ Cm per panel for third natural mode at M=0.77
0 50 100 150 200 250−2
−1
0
1
2
3
∆ C
m
Aerodynamic Panel
Imaginary ∆ Cm per panel for third natural mode at M=0.77
High−Fidelity CFD
DLM
Figure 5.14: Comparison of Real and Imaginary ∆Cm for Third Natural Mode, M = 0.77
0 50 100 150 200 250−20
−15
−10
−5
0
5
10
15
∆ C
l
Aerodynamic Panel
Real ∆ Cl per panel for fourth natural mode at M=0.77
0 50 100 150 200 250−3
−2
−1
0
1
2
3
4
∆ C
l
Aerodynamic Panel
Imaginary ∆ Cl per panel for fourth natural mode at M=0.77
High−Fidelity CFD
DLM
Figure 5.15: Comparison of Real and Imaginary ∆Cl for Fourth Natural Mode, M = 0.77
67

0 50 100 150 200 250−6
−4
−2
0
2
4
6
∆ C
m
Aerodynamic Panel
Real ∆ Cm per panel for fourth natural mode at M=0.77
0 50 100 150 200 250−1
−0.5
0
0.5
1
1.5
∆ C
m
Aerodynamic Panel
Imaginary ∆ Cm per panel for fourth natural mode at M=0.77
High−Fidelity CFD
DLM
Figure 5.16: Comparison of Real and Imaginary ∆Cm for Fourth Natural Mode, M = 0.77
of the immense time saving enjoyed by not needing to remesh the computational domain
at each time step. The results presented above show acceptable agreement with current
DLM aerodynamic calculations and hence show promise for use with the modal-based
AIC method. In future work, the unsteady aerodynamic calculations may be replaced by
more accurate simulations, incorporating Navier-Stokes solvers, as the framework of adding
unsteady data is now in place.
68

Conclusions
It was determined that a more cost and labor effective tool needed to be developed In-
House to perform aeroelastic analysis at Bombardier. For this reason the Controlled Facilities
Engineering Services and Dynamics Groups at Bombardier Aerospace have developed a
methodology to analyze flutter response of aircraft. This method was developed to be used
with aerodynamic data obtained from the Doublet Lattice Method, which is included in the
structural solver in use by Bombardier and has proven to be very useful in preliminary stages
of an aircraft design program at Bombardier. The limitations introduced by the Doublet
Lattice Method have made high-fidelity Computation Fluid Dynamic (CFD) aerodynamic
data a necessity.
Steady high-fidelity CFD data had previously been incorporated into the flutter calcula-
tions through the modal-based improved Aerodynamic Influence Coefficient (AIC) method.
The addition of steady high-fidelity CFD data proved to give improved results for flutter
calculations in the subsonic regime. For the transonic and supersonic regimes the results
were not as reliable. This is where the need for unsteady high-fidelity CFD data comes.
The incorporation of unsteady aerodynamic data to the methodology will provide more
accurate results in the transonic and supersonic regimes. In order to obtain this unsteady
high-fidelity CFD data, the Transpiration Method was investigated.
Significant work has been completed on implementing the Transpiration Method into
69

both steady and unsteady computational fluid dynamic analysis. This work includes the
simulation of static deflections with acceptable agreement to actually deflected CFD models.
This was shown through the simulation of a flap deflection of the BACT wing and an
arbitrary deflection of the AGARD wing.
The Transpiration Method was also shown to be viable in unsteady CFD simulations,
with results of modal deflections matching well with previous method results. Although
the Transpiration Method proved to show promise in unsteady CFD simulations, there are
still limitations that are imposed by the fact that the Transpiration Method must employ
an Euler solver and hence inviscid assumptions are applied to the simulations. This is due
to the fact that, as the method is implemented in this research, the surface velocities are
modified in order to simulate surface deflections and hence the no-slip condition on the
surface may not be applied. This assumption of inviscid flow may lead to the inability to
capture all shock related flow conditions. Despite this, the incorporation of an Euler solver
is still much improved to that of the two-dimensional DLM solver which is currently in use
at Bombardier.
The modal-based AIC method was applied to the aerodynamic matrices used in
NASTRAN. Using aerodynamic data from the Doublet Lattice Method, the modal-based
AIC method displayed the ability to approximate aerodynamic loads of different structural
models by use of an aerodynamic base set of modal information.
Implementation of the modal-based AIC method with high-fidelity CFD data was
accomplished. Modified aerodynamic matrices were produced for use in NASTRAN to
perform flutter analysis of several structural configurations.
Several difficulties were encountered during this research leading to final results being
unobtainable. That is, the flutter results using the modal-based AIC method were not
able to be obtained. This includes analysis with aerodynamic data from either DLM or
70

high-fidelity CFD. The main reason for this difficulty was due to the incorporation of
the unsteady aerodynamic data into the aerodynamic matrices in NASTRAN. Previous
work included only steady data, and the addition of unsteady data proved to be more
difficult than originally anticipated. Work is continuing with this, and preliminary flutter
analysis results from the modal-based AIC method with the incorporation of high-fidelity
CFD data has been completed. These preliminary results show expected trends in the
flutter mechanism behaviour, however, due to the uncertainty of the implementation of the
high-fidelity CFD data, these results will need to be further investigated. Further work is
to be done with flutter results obtained at different reduced frequencies.
Work is also being completed on obtaining and validating transonic unsteady high-fidelity
CFD data, using the Transpiration Method.
The work accomplished in this project has furthered the development of the modal-based
AIC method as applied to dynamic aeroelastic analysis using NASTRAN at Bombardier
Aerospace. The Transpiration Boundary Condition Method has been shown to be a viable
tool in performing unsteady aerodynamic analysis, and that this data may be used in the
modal-based AIC method. More work must be completed on implementing the unsteady
aerodynamic data into NASTRAN for flutter analysis, as well as further investigations of
transonic aerodynamic analysis.
71

Bibliography
[1] ZAERO Theoretical Manual.
[2] ANSYS Inc. ANSYS CFX-Solver Manager User’s Guide, 13.0 edition, November 2010.
[3] Fisher C.F. Application of the transpiration method for efficient aeroelastic analysis
using an euler solver. Master’s thesis, Oklahoma State University, Oklahoma, 1996.
[4] Fisher C.F. and Arena A.S. On the transpiration method for efficient aeroelastic
analysis using an euler solver. In AIAA 96-3436. American Institute of Aeronautics
and Astronautics, July 1996.
[5] Stephens C.H. Cfd-based aeroservoelastic predictions on a benchmark configuration
using the transpiration method. Master’s thesis, Oklahoma State University, Oklahoma,
1998.
[6] CMSoft. AERO for Powerful Multi-Physics Solutions.
[7] Arfken G. Rayleigh-Ritz Variational Technique, pages 957–961. Mathematical Methods
for Physicists. Academic Press, 3rd edition, 1985.
[8] Hassig H.J. An approximate true damping solution of the flutter equation by determi-
nant iteration. Journal of Aircraft, 8(11):885–889, November 1971.
72

[9] Anderson J.D. Fundamentals of Aerodynamics. McGraw-Hill, 4th edition, 2009.
[10] Yates E.C. Jr. Agard standard aeroelastic configuration for dynamic response, i-wing
445.6. Technical Report 765, AGARD, 1985.
[11] Kavukcuoglu K. Wing fluter analysis with an uncoupled method. Master’s thesis, The
Middle East Technical University, Ankara, 2003.
[12] Gupta K.K. Stars - an integrated, multidisciplinary, finite-element, structural, fluids,
aeroelastic, and aeroservoelastic analysis computer program. Technical Report 4795,
NASA, 1997.
[13] Lighthill M.J. On displacement thickness. Journal of Fluid Mechanics, 4(4):383–392,
August 1958.
[14] MSC. NASTRAN Aeroelastic User Guide.
[15] Gratton P. Improved aerodynamic influence coefficients for dynamic aeroelastic analyses.
Master’s thesis, McGill University, Montreal, 2011.
[16] Chen P.C., Sarhaddi D., and Liu D.D. Transonic aic approach for aeroelastic and mdo
applications. Journal of Aircraft, 37(1):85–94, 2000.
[17] Bisplinghoff R.L., Ashley H., and Halfman R.L. Aeroelasticity. Dover books on physics.
Dover Publ., 1996.
73

Appendix A
Program Scripts
A.1 Deflecting Model
1 clear all; clc; hold off;
2
3 %% Define Time Parameters
4 NumTimePoints=1;
5 Time=1;
6 t=0:1/NumTimePoints*Time:Time;
7 omega=5.778032E+01;
8
9 %% Read Undeflected NASTRAN Model
10 newData1 = importdata(’MQ_TEST_AGARD_3.bdf’);
11
12 % Create new variables in the base workspace from those fields.
13 vars = fieldnames(newData1);
14 for i = 1:length(vars)
15 assignin(’base’, vars{i}, newData1.(vars{i}));
16 end
17
18 grid=data(:,1); x=data(:,2); y=data(:,3); z=data(:,4);
19
20 %% Read Eigenvector Data
21 clear data i newData1 textdata vars
22 Mode=1;
23 File_Name=...
24 [’AGARD_EIGENVECTOR_Mode_’...
25 ,num2str(Mode),’_Update.dat’];
26 newData1 = importdata(File_Name);
74
27
28 % Create new variables in the base workspace from those fields.
29 vars = fieldnames(newData1);
30 for i = 1:length(vars)
31 assignin(’base’, vars{i}, newData1.(vars{i}));
32 end
33
34 T1=data(:,1);
35 T2=data(:,2);
36 T3=-data(:,3);
37 R1=data(:,4);
38 R2=data(:,5);
39 R3=data(:,6);
40
41 clear data i newData1 textdata vars
42
43 %% Deflect NASTRAN Model
44 T1=T1*0.5614/54.3161;
45 T2=T2*0.5614/54.3161;
46 T3=T3*0.5614/54.3161;
47
48 for I=1:NumTimePoints
49 T1_Time(I,:)=T1*(sin(2*pi()*omega*t(I)));
50 T2_Time(I,:)=T2*(sin(2*pi()*omega*t(I)));
51 T3_Time(I,:)=T3*(sin(2*pi()*omega*t(I)));
52 end
53
54 for I=1:NumTimePoints
55 for J=1:275
56 X_Time(J,I)=x(J,1)+T1_Time(I,J);
57 Y_Time(J,I)=y(J,1)+T2_Time(I,J);
58 Z_Time(J,I)=z(J,1)+T3_Time(I,J);
59 end
60 end
61 X=x+T1;
62 Y=y+T2;
63 Z=z+T3;
64
65 plot3(x,y,z,’k.’,X,Y,Z,’r.’)
66
67 %% Read Undeflected CFD Model
68 File_Name=’Uneflected_Points_Sept-20-2012.dat’;
69 fid=fopen(File_Name);
70 N_temp=textscan(fid,’%2*c %f’,1,’headerlines’,6);
71 N(1,1)=N_temp{1,1};
72 clear N_temp
73 X1=zeros(240,1);
74 Y1=zeros(240,1);
75 Z1=zeros(240,1);
76 N_temp=textscan(fid,’%f %f %f’,N(1,1),’headerlines’,3);
75

77 X1(1:N,1)=N_temp{1,1};
78 Z1(1:N,1)=N_temp{1,2};
79 Y1(1:N,1)=N_temp{1,3};
80 k=N+1;
81 clear N_temp
82
83 for i=2:10
84 N_temp=textscan(fid,’%f %f %f’,N(1,1),’headerlines’,6);
85 X1(k:(k+N-1),1)=N_temp{1,1};
86 Z1(k:(k+N-1),1)=N_temp{1,2};
87 Y1(k:(k+N-1),1)=N_temp{1,3};
88 clear N_temp
89 k=k+N;
90 end
91 fclose(fid);
92 Y1=-Y1;
93 x=x/12;
94 y=y/12;
95 z=z/12;
96 X=X/12;
97 Y=Y/12;
98 Z=Z/12;
99 X_Time=X_Time/12;
100 Y_Time=Y_Time/12;
101 Z_Time=Z_Time/12;
102 plot3(X1,Y1,Z1,’-k’,X1,Y1,-Z1,’-k’,x,y,z,’k.’,X_Time,Y_Time,Z_Time,’r.’)
103
104 %% Deflect CFD Model
105 for II=1:NumTimePoints
106 xlin = linspace(min(X),max(X),5000);
107 ylin = linspace(min(Y),max(Y),5000);
108 [XX,YY]=meshgrid(xlin,ylin);
109
110 ZZ=griddata(X_Time(:,II),Y_Time(:,II),Z_Time(:,II),XX,YY);
111
112 [XI,YI]=meshgrid(X1,Y1);
113 ZI = interp2(XX,YY,ZZ,X1,Y1);
114 clear XX YY ZZ xlin ylin
115
116 Z2=ZI-Z1;
117 ZI=ZI+Z1;
118
119 k=1;
120 for I=1:10
121 for J=1:24
122 if isnan(ZI(k))==1
123 ZI(k)=(((Z2(k+1))+(ZI(k+1)))/2);
124 end
125 k=k+1;
126 end
76
127 end
128 k=1;
129 for I=11:20
130 for J=1:24
131 if isnan(Z2(k))==1
132 Z2(k)=(((Z2(k+1))+(ZI(k+1)))/2);
133 end
134 k=k+1;
135 end
136 end
137 plot3(X1,Y1,Z1,’-k’,X1,Y1,-Z1,’-k’,X1,Y1,ZI,’-k’,X1,Y1,Z2,’-k’)
138
139 %% Write Deflected Points File
140 File_Name=[’Time_’,num2str(II),’_Mode_’,num2str(Mode),...
141 ’_Deflected_Points.dat’];
142 fid=fopen(File_Name,’wt’);
143 k=1;
144
145 fprintf(fid,’TITLE = "Finite-Element Data"\n’)
146 fprintf(fid,’VARIABLES = "X"\n’)
147 fprintf(fid,’"Y"\n’)
148 fprintf(fid,’"Z"\n’)
149 for I=1:20
150
151 fprintf(fid,’ZONE T="Extracted Points%u"\n’,I)
152 fprintf(fid,’ STRANDID=0, SOLUTIONTIME=0\n’)
153 fprintf(fid,’ I=24, J=1, K=1, ZONETYPE=Ordered\n’)
154 fprintf(fid,’ DATAPACKING=POINT\n’)
155 fprintf(fid,’ DT=(DOUBLE DOUBLE DOUBLE )\n’)
156
157 if I<=8
158 for J=1:24
159 if J<=1
160 fprintf(fid,’ %1.9e %1.9e %1.9e\n’, X1(k),ZI(k),-Y1(k))
161 else
162 fprintf(fid,’%1.9e %1.9e %1.9e\n’, X1(k),ZI(k),-Y1(k))
163 end
164 k=k+1;
165 end
166 elseif I==9
167 for J=1:24
168 if J<=1
169 fprintf(fid,’ %1.9e %1.9e %1.9e\n’,...
170 X1(k),(((Z2(k+1))...
171 +(ZI(k+1)))/2),-Y1(k))
172 else
173 fprintf(fid,’%1.9e %1.9e %1.9e\n’, X1(k),ZI(k),-Y1(k))
174 end
175 k=k+1;
176 end
77

177 elseif I==10
178 for J=1:24
179 if J<=1
180 fprintf(fid,’ %1.9e %1.9e %1.9e\n’,...
181 X1(k),(((Z2(k+1))...
182 +(ZI(k+1)))/2),-Y1(k))
183 else
184 fprintf(fid,’%1.9e %1.9e %1.9e\n’, X1(k),ZI(k),-Y1(k))
185 end
186 k=k+1;
187 end
188 elseif I==11
189 k=1;
190 for J=1:24
191 if J<=1
192 fprintf(fid,’ %1.9e %1.9e %1.9e\n’, X1(k),Z2(k),-Y1(k))
193 else
194 fprintf(fid,’%1.9e %1.9e %1.9e\n’, X1(k),Z2(k),-Y1(k))
195 end
196 k=k+1;
197 end
198 elseif I==19
199 for J=1:24
200 if J<=1
201 fprintf(fid,’ %1.9e %1.9e %1.9e\n’,...
202 X1(k),(((Z2(k+1))...
203 +(ZI(k+1)))/2),-Y1(k))
204 else
205 fprintf(fid,’%1.9e %1.9e %1.9e\n’, X1(k),Z2(k),-Y1(k))
206 end
207 k=k+1;
208 end
209 elseif I==20
210 for J=1:24
211 if J<=1
212 fprintf(fid,’ %1.9e %1.9e %1.9e\n’,...
213 X1(k),(((Z2(k+1))...
214 +(ZI(k+1)))/2),-Y1(k))
215 else
216 fprintf(fid,’%1.9e %1.9e %1.9e\n’, X1(k),Z2(k),-Y1(k))
217 end
218 k=k+1;
219 end
220 else
221 for J=1:24
222 if J<=1
223 fprintf(fid,’ %1.9e %1.9e %1.9e\n’, X1(k),Z2(k),-Y1(k))
224 else
225 fprintf(fid,’%1.9e %1.9e %1.9e\n’, X1(k),Z2(k),-Y1(k))
226 end
78

227 k=k+1;
228 end
229 end
230 end
231 fclose(fid);
232 end
233
234 %% Creat Prob File
235 File_Name=’PROBWING001.inp’;
236 fid=fopen(File_Name,’wt’);
237 fprintf(fid,’480\n3\n’)
238 for k=1:240
239 fprintf(fid,’ %1.9e %1.9e %1.9e\n’, X1(k),Z1(k),-Y1(k))
240 end
241 for k=1:240
242 fprintf(fid,’ %1.9e %1.9e %1.9e\n’, X1(k),-Z1(k),-Y1(k))
243 end
244 fclose(fid);
A.2 Transpiration Boundary Conditions
1 clear all
2 clc
3
4 NumTimePoints=500;
5 Time=1;
6 t=0:1/NumTimePoints*Time:Time;
7 Mode=2;
8 for II=1:NumTimePoints
9 %% Read Velocity Data
10 N=zeros(480,1);
11 E=zeros(480,1);
12
13 fid=fopen(’Data_Undeflected_M77_Sept-17-2012.dat’);
14 N_temp=textscan(fid,’%6*c %f %*s %9*c %f’,1,’headerlines’,6);
15 N(1,1)=N_temp{1,1};
16 E(1,1)=N_temp{1,2};
17 clear N_temp
18
19 N_temp=textscan(fid,’%f %f %f’,N(1,1),’headerlines’,3);
20 U(1)={N_temp{1,1}};
21 V(1)={N_temp{1,2}};
22 W(1)={N_temp{1,3}};
23 clear N_temp
24
25 for i=2:480
26 N_temp=textscan(fid,’%6*c %f %*s %9*c %f’,1,...
27 ’headerlines’,E(i-1,1)+3);
28 N(i,1)=N_temp{1,1};
29 E(i,1)=N_temp{1,2};
79

30 clear N_temp
31
32 N_temp=textscan(fid,’%f %f %f’,N(i,1),’headerlines’,3);
33 U(i,1)={N_temp{1,1}};
34 V(i,1)={N_temp{1,2}};
35 W(i,1)={N_temp{1,3}};
36 clear N_temp
37 end
38 fclose(fid);
39 %% Take Average Values
40 for i=1:480
41 Avg_U(i,1)=mean(U{i,1});
42 Avg_V(i,1)=mean(V{i,1});
43 Avg_W(i,1)=mean(W{i,1});
44 end
45 %% Read XYZ Data
46 File_Name=[’Time_’,num2str(II),’_Mode_’,num2str(Mode),...
47 ’_Deflected_Points.dat’];
48 fid=fopen(File_Name);
49
50 N_temp=textscan(fid,’%f %f %f’,24,’headerlines’,9);
51 X(1)={N_temp{1,1}};
52 Y(1)={N_temp{1,2}};
53 Z(1)={N_temp{1,3}};
54 clear N_temp
55
56 for i=2:20
57 N_temp=textscan(fid,’%f %f %f’,24,’headerlines’,6);
58 X(i,1)={N_temp{1,1}};
59 Y(i,1)={N_temp{1,2}};
60 Z(i,1)={N_temp{1,3}};
61 clear N_temp
62 end
63 fclose(fid);
64 %% Top
65 %% Determine Normals
66 k=1;
67 for j=1:9
68 for i=1:23
69 Vec(k,:)=[(X{j,1}(i+1,1)-X{j,1}(i,1)),...
70 (Y{j,1}(i+1,1)-Y{j,1}(i,1)),(Z{j,1}(i+1,1)-Z{j,1}(i,1))];
71 Vec(k+1,:)=[(X{j+1,1}(i,1)-X{j,1}(i,1)),...
72 (Y{j+1,1}(i,1)-Y{j,1}(i,1)),(Z{j+1,1}(i,1)-Z{j,1}(i,1))];
73 Norm(k,:)=cross(Vec(k,:),Vec(k+1,:));
74 k=k+1;
75 end
76 Vec(k,:)=[(X{j,1}(i,1)-X{j,1}(i+1,1)),...
77 (Y{j,1}(i,1)-Y{j,1}(i+1,1)),(Z{j,1}(i,1)-Z{j,1}(i+1,1))];
78 Vec(k+1,:)=[(X{j+1,1}(i,1)-X{j,1}(i,1)),...
79 (Y{j+1,1}(i,1)-Y{j,1}(i,1)),(Z{j+1,1}(i,1)-Z{j,1}(i,1))];
80
80 Norm(k,:)=cross(Vec(k,:),Vec(k+1,:));
81 k=k+1;
82 end
83 j=j+1;
84 for i=1:23
85 Vec(k,:)=[(X{j,1}(i+1,1)-X{j,1}(i,1)),...
86 (Y{j,1}(i+1,1)-Y{j,1}(i,1)),(Z{j,1}(i+1,1)-Z{j,1}(i,1))];
87 Vec(k+1,:)=[(X{j-1,1}(i,1)-X{j,1}(i,1)),...
88 (Y{j-1,1}(i,1)-Y{j,1}(i,1)),(Z{j-1,1}(i,1)-Z{j,1}(i,1))];
89 Norm(k,:)=cross(Vec(k+1,:),Vec(k,:));
90 k=k+1;
91 end
92 Vec(k,:)=[(X{j,1}(i,1)-X{j,1}(i+1,1)),...
93 (Y{j,1}(i,1)-Y{j,1}(i+1,1)),(Z{j,1}(i,1)-Z{j,1}(i+1,1))];
94 Vec(k+1,:)=[(X{j-1,1}(i,1)-X{j,1}(i,1)),...
95 (Y{j-1,1}(i,1)-Y{j,1}(i,1)),(Z{j-1,1}(i,1)-Z{j,1}(i,1))];
96 Norm(k,:)=cross(Vec(k+1,:),Vec(k,:));
97 k=k+1;
98
99 %% Bottom
100 %% Determine Normals
101 k=241;
102 for j=11:19
103 for i=1:23
104 Vec(k,:)=[(X{j,1}(i+1,1)-X{j,1}(i,1)),...
105 (Y{j,1}(i+1,1)-Y{j,1}(i,1)),(Z{j,1}(i+1,1)-Z{j,1}(i,1))];
106 Vec(k+1,:)=[(X{j+1,1}(i,1)-X{j,1}(i,1)),...
107 (Y{j+1,1}(i,1)-Y{j,1}(i,1)),(Z{j+1,1}(i,1)-Z{j,1}(i,1))];
108 Norm(k,:)=cross(Vec(k+1,:),Vec(k,:));
109 k=k+1;
110 end
111 Vec(k,:)=[(X{j,1}(i,1)-X{j,1}(i+1,1)),...
112 (Y{j,1}(i,1)-Y{j,1}(i+1,1)),(Z{j,1}(i,1)-Z{j,1}(i+1,1))];
113 Vec(k+1,:)=[(X{j+1,1}(i,1)-X{j,1}(i,1)),...
114 (Y{j+1,1}(i,1)-Y{j,1}(i,1)),(Z{j+1,1}(i,1)-Z{j,1}(i,1))];
115 Norm(k,:)=cross(Vec(k+1,:),Vec(k,:));
116 k=k+1;
117 end
118 j=j+1;
119 for i=1:23
120 Vec(k,:)=[(X{j,1}(i+1,1)-X{j,1}(i,1)),...
121 (Y{j,1}(i+1,1)-Y{j,1}(i,1)),(Z{j,1}(i+1,1)-Z{j,1}(i,1))];
122 Vec(k+1,:)=[(X{j-1,1}(i,1)-X{j,1}(i,1)),...
123 (Y{j-1,1}(i,1)-Y{j,1}(i,1)),(Z{j-1,1}(i,1)-Z{j,1}(i,1))];
124 Norm(k,:)=cross(Vec(k,:),Vec(k+1,:));
125 k=k+1;
126 end
127 Vec(k,:)=[(X{j,1}(i,1)-X{j,1}(i+1,1)),...
128 (Y{j,1}(i,1)-Y{j,1}(i+1,1)),(Z{j,1}(i,1)-Z{j,1}(i+1,1))];
129 Vec(k+1,:)=[(X{j-1,1}(i,1)-X{j,1}(i,1)),...
81

130 (Y{j-1,1}(i,1)-Y{j,1}(i,1)),(Z{j-1,1}(i,1)-Z{j,1}(i,1))];
131 Norm(k,:)=cross(Vec(k,:),Vec(k+1,:));
132 k=k+1;
133
134 %% Calculate Modified Velocities
135 %Correction to get Magnitude of Normal equal to 1
136 for i=1:480
137 Norm(i,:)=Norm(i,:)/(norm(Norm(i,:)));
138 end
139 %Calculate Velocites
140 u=[Avg_U Avg_V Avg_W];
141 k=1;
142 for j=1:20
143 for i=1:24
144 U_Prime(k,:)=u(k,:)-((dot(u(k,:),Norm(k,:)))*Norm(k,:));
145 k=k+1;
146 end
147 end
148
149 U_PRI(II,1)={U_Prime(:,1)};
150 V_PRI(II,1)={U_Prime(:,2)};
151 W_PRI(II,1)={U_Prime(:,3)};
152
153 end
154
155 %% Create Boundary Confdition Files
156 for I=1:480
157 clear fid
158 Cp_File=([’WING’,num2str(I,’%03u’)]);
159 File_Name=[Cp_File,’.pri’];
160 fid=fopen(File_Name,’wt’);
161
162 fprintf(fid,’nvariables 3\n’)
163 fprintf(fid,’#------------\n’)
164 fprintf(fid,’variable %1u\n’,1)
165 fprintf(fid,’method 1\n’)
166 fprintf(fid,’npoints %3u\n’,NumTimePoints)
167 fprintf(fid,’t f(t)\n’)
168 for j=1:NumTimePoints
169 fprintf(fid,’%1.3f %1.9f\n’,t(j),U_PRI{j,1}(I,1))
170 end
171 fprintf(fid,’#------------\n’)
172 fprintf(fid,’variable %1u\n’,2)
173 fprintf(fid,’method 1\n’)
174 fprintf(fid,’npoints %3u\n’,NumTimePoints)
175 fprintf(fid,’t f(t)\n’)
176 for j=1:NumTimePoints
177 fprintf(fid,’%1.3f %1.9f\n’,t(j),V_PRI{j,1}(I,1))
178 end
179 fprintf(fid,’#------------\n’)
82

180 fprintf(fid,’variable %1u\n’,3)
181 fprintf(fid,’method 1\n’)
182 fprintf(fid,’npoints %3u\n’,NumTimePoints)
183 fprintf(fid,’t f(t)\n’)
184 for j=1:NumTimePoints
185 fprintf(fid,’%1.3f %1.9f\n’,t(j),W_PRI{j,1}(I,1))
186 end
187
188 fclose(fid);
189
190 end
191 plot(1:480,Avg_V(:,1),’-k^’)
192 hold on
193 for i=10:11
194 plot(1:480,V_PRI{i,1})
195 end
196 hold off
A.3 Processing Output
1 clc
2 clear all
3 %%
4 Delta_t=2e-3;
5 NUM_FILES=250;
6 dt=Delta_t; % sampling rate
7 et=NUM_FILES*Delta_t; % end of the interval
8 t=dt:dt:et; % sampling range
9
10 %% Read Prob Data
11 File_Name=’PROB_Mode_2_M77_Nov-19-2012.dat’;
12 I=1;
13 fid=fopen(File_Name);
14 N_temp=textscan(fid,’%f %f %f\n %f %f %f %f %f\n %f %f %f %f %f\n %f’,...
15 480,’headerlines’,15); %%f\n %f
16 X(1,I)={N_temp{1,1}};
17 Y(1,I)={N_temp{1,2}};
18 Z(1,I)={N_temp{1,3}};
19 Cp(1,I)={N_temp{1,11}};
20 P(1,I)={N_temp{1,4}};
21 U(1,I)={N_temp{1,6}};
22 V(1,I)={N_temp{1,7}};
23 W(1,I)={N_temp{1,8}};
24 M(1,I)={N_temp{1,10}};
25 clear N_temp
26
27 for i=2:NUM_FILES
28 N_temp=textscan...
29 (fid,’%f %f %f\n %f %f %f %f %f\n %f %f %f %f %f\n %f’,480,...
30 ’headerlines’,2);
83
31 X(i,I)={N_temp{1,1}};
32 Y(i,I)={N_temp{1,2}};
33 Z(i,I)={N_temp{1,3}};
34 Cp(i,I)={N_temp{1,11}};
35 P(i,I)={N_temp{1,4}};
36 U(i,I)={N_temp{1,6}};
37 V(i,I)={N_temp{1,7}};
38 W(i,I)={N_temp{1,8}};
39 M(i,I)={N_temp{1,10}};
40 clear N_temp
41 end
42 fclose(fid);
43 clear E N File_Name
44
45 %% Read Area Data
46 File_Name=’Area.txt’;
47 fid=fopen(File_Name);
48 N_temp=textscan(fid,’%f’,480);
49 Area(:,1)=N_temp{1,1};
50 clear N_temp
51 fclose(fid);
52 clear File_Name
53 Area=Area/12/12/4;
54 %% Output Results
55
56 for I=1:NUM_FILES
57 for i=1:480
58 lift(I,i)=Cp{I,1}(i,1)*Area(i,1);
59 end
60 end
61 for I=1:NUM_FILES
62 Lift(I,1)=((sum(lift(I,1:240))))-((sum(lift(I,241:480))));
63 for i=1:240
64 Lift_240(I,i)=lift(I,i)-lift(I,i+240);
65 end
66 end
67
68 %% Unsteady Lift
69 for I=1:240
70 y_UN(I,:) =Lift_240(:,I)’;
71 Y_UN(I,:) = fft(y_UN(I,:)); % compute Fourier transform
72 n = size(y_UN(I,:),2)/2; % 2nd half are complex conjugates
73 freq_UN(I,:) = (0:(n-1))/(2*n*dt); % abscissa viewing window
74
75 Corr_UN(I,:)=(max(y_UN(I,:))/max(abs(Y_UN(I,:))/(n)));
76 Y_UN(I,:)=Y_UN(I,:)*Corr_UN(I,:);
77 amp_spec_UN(I,:) = abs(Y_UN(I,:))/(n); % absolute value and normalize
78
79 [B_UN(I,:),IX_UN(I,:)] = sort(amp_spec_UN(I,1:n),’descend’);
80 [AMP_MAX_UN(I,:),i_UN(I,:)]=max(amp_spec_UN(I,:));
84

81
82 if i_UN(I,1)>=n
83 i_UN(I,1)=1;
84 end
85
86 FREQ_MAX_UN(I,:)=freq_UN(I,i_UN(I,1));
87
88 FREQ_AVG_UN(I,:)=(((freq_UN(I,IX_UN(I,1)))*amp_spec_UN(I,IX_UN(I,1)))...
89 +((freq_UN(I,IX_UN(I,2)))*amp_spec_UN(I,IX_UN(I,2))))...
90 /(amp_spec_UN(I,IX_UN(I,1))+amp_spec_UN(I,IX_UN(I,2)));
91
92 if FREQ_MAX_UN(I,:)== 0
93 QKH_CFD(I,1)= real(Y_UN(I,IX_UN(I,2)))/n;
94 QKH_CFD(I,2)= imag(Y_UN(I,IX_UN(I,2)))/n;
95 else
96 QKH_CFD(I,1)= real(Y_UN(I,IX_UN(I,1)))/n;
97 QKH_CFD(I,2)= imag(Y_UN(I,IX_UN(I,1)))/n;
98 end
99 end
100 % Real and Imaginary Lift
101 QKH_CFD(:,1)=QKH_CFD(:,1)*150000;...
102 %15000 150000 -30000 -20000 6500 55000 30000 -20000
103 QKH_CFD(:,2)=QKH_CFD(:,2)*8000;...
104 %2000 8000 -5500 5000 2500 7000 5500 5000
105
106
107 %% Read DLM Data
108 File_Name=’AGARD_DLM_M77.f06’;
109 fid=fopen(File_Name);
110 N_temp=textscan(fid,...
111 ’%*s %f %*c %f %f %*c %f %f %*c %f %f %*c %f %f %*c %f’,...
112 96,’headerlines’,16408); %16310 16408 16506 16604
113 i=1;
114 j=1;
115 for k=1:48
116 QKH(i,1)=N_temp{1,1}(j,1);
117 QKH(i,2)=N_temp{1,2}(j,1);
118 QKH(i,3)=N_temp{1,3}(j,1);
119 QKH(i,4)=N_temp{1,4}(j,1);
120 QKH(i+1,1)=N_temp{1,5}(j,1);
121 QKH(i+1,2)=N_temp{1,6}(j,1);
122 QKH(i+1,3)=N_temp{1,7}(j,1);
123 QKH(i+1,4)=N_temp{1,8}(j,1);
124 QKH(i+2,1)=N_temp{1,9}(j,1);
125 QKH(i+2,2)=N_temp{1,10}(j,1);
126
127 QKH(i+2,3)=N_temp{1,1}(j+1,1);
128 QKH(i+2,4)=N_temp{1,2}(j+1,1);
129 QKH(i+3,1)=N_temp{1,3}(j+1,1);
130 QKH(i+3,2)=N_temp{1,4}(j+1,1);
85

131 QKH(i+3,3)=N_temp{1,5}(j+1,1);
132 QKH(i+3,4)=N_temp{1,6}(j+1,1);
133 QKH(i+4,1)=N_temp{1,7}(j+1,1);
134 QKH(i+4,2)=N_temp{1,8}(j+1,1);
135 QKH(i+4,3)=N_temp{1,9}(j+1,1);
136 QKH(i+4,4)=N_temp{1,10}(j+1,1);
137 i=i+5;
138 j=j+2;
139 end
140
141 clear N_temp
142 fclose(fid);
143 clear File_Name
144
145
146 %% Moment
147 Data = importdata(’Node_AEFACT_Corrected.dat’);
148
149 k=1;
150 for j=1:10
151 for i=1:24
152 l(k,1)=(Data(i,2)-Data(i+1,2))/4;
153 k=k+1;
154 end
155 end
156 for i=1:240
157 QKH_CFD(i,3)=QKH_CFD(i,1)*l(i);
158 QKH_CFD(i,4)=QKH_CFD(i,2)*l(i);
159 end
160
161
162 % Real and Imaginary Moment
163 QKH_CFD(:,3)=QKH_CFD(:,3)*-0.8; %-0.8 -0.8 -0.8 -0.8
164 QKH_CFD(:,4)=QKH_CFD(:,4)*-0.7; %-0.8 -0.7 -0.7 -0.5
165
166 %% Plot
167 figure(1)
168 subplot(2,1,1)
169 plot(1:length(QKH_CFD(:,1)),QKH_CFD(:,1),’-k.’,...
170 1:length(QKH(:,1)),QKH(:,1),’-r.’)
171 grid on
172 ylabel(’\Delta Cl’)
173 xlabel(’Aerodynamic Panel’)
174 title(’Real \Delta Cl per panel for second natural mode at M=0.77’)
175 legend(’High-Fidelity CFD’,’DLM’)
176 subplot(2,1,2)
177 plot(1:length(QKH_CFD(:,2)),QKH_CFD(:,2),’-k.’,...
178 1:length(QKH(:,2)),QKH(:,2),’-r.’)
179 grid on
180 ylabel(’\Delta Cl’)
86

181 xlabel(’Aerodynamic Panel’)
182 title(’Imaginary \Delta Cl per panel for second natural mode at M=0.77’)
183
184 figure(2)
185 subplot(2,1,1)
186 plot(1:length(QKH_CFD(:,3)),QKH_CFD(:,3),’-k.’,...
187 1:length(QKH(:,3)),QKH(:,3),’-r.’)
188 grid on
189 ylabel(’\Delta Cm’)
190 xlabel(’Aerodynamic Panel’)
191 title(’Real \Delta Cm per panel for second natural mode at M=0.77’)
192 legend(’High-Fidelity CFD’,’DLM’)
193 subplot(2,1,2)
194 plot(1:length(QKH_CFD(:,4)),QKH_CFD(:,4),’-k.’,...
195 1:length(QKH(:,4)),QKH(:,4),’-r.’)
196 grid on
197 ylabel(’\Delta Cm’)
198 xlabel(’Aerodynamic Panel’)
199 title(’Imaginary \Delta Cm per panel for second natural mode at M=0.77’)
200
201
202 %% Create File
203 Print=0;
204 if Print==1
205 Mode=2;
206 Output_File=[’QKH_CFD_Mode_’,num2str(Mode),’_Con_2.txt’];
207
208 fid=fopen(Output_File,’wt’);
209 for i=1:240
210 a=sprintf(’%+16.9E% +16.9E% +16.9E% +16.9E\n’,...
211 QKH_CFD(i,1),QKH_CFD(i,2),QKH_CFD(i,3),QKH_CFD(i,4));
212 % a = strrep(a, ’E+0’, ’E+’);
213 % a = strrep(a, ’E-0’, ’E-’);
214 % a = strrep(a, ’+’, ’ ’);
215 fprintf(fid,’%s’,a);
216 end
217 fclose(fid);
218 end
219 clear fid
87