inferring effective forces in collective motion yael katz, christos ioannou, kolbjørn tunstrøm and...
TRANSCRIPT
Inferring effective forces in collective motion
Yael Katz, Christos Ioannou, Kolbjørn Tunstrøm and Iain Couzin
Dept. of Ecology & Evolutionary Biology Princeton University
Cristián Huepe Unaffi liated NSF Grantee Cristian Huepe Labs Inc. - Chicago IL
This work was supported by the National Science Foundation under Grants No. DMS-0507745 & PHY-0848755
Outline
• Overview Background Some basic models of collective
motion Challenge: The inverse problem
• A detailed effective-force analysis Fish schooling: quasi 2D
experiments Model-free approach Effective-forces: results
Motivation
Collective motion is observed in diverse animal species, not only in bacteria.
Fish schools & bird flocks can involve from a few individuals to several thousands
Locust swarms can contain 109 individuals traveling thousands of kilometers
– Background
Current efforts Quantitative experiments Distinguishing generic and specific behaviors
Challenges in modeling Different models produce similar dynamics We can be prejudiced by familiar interactions
The inverse problem: Deducing the interaction rules from collective
dynamics
– Challenges
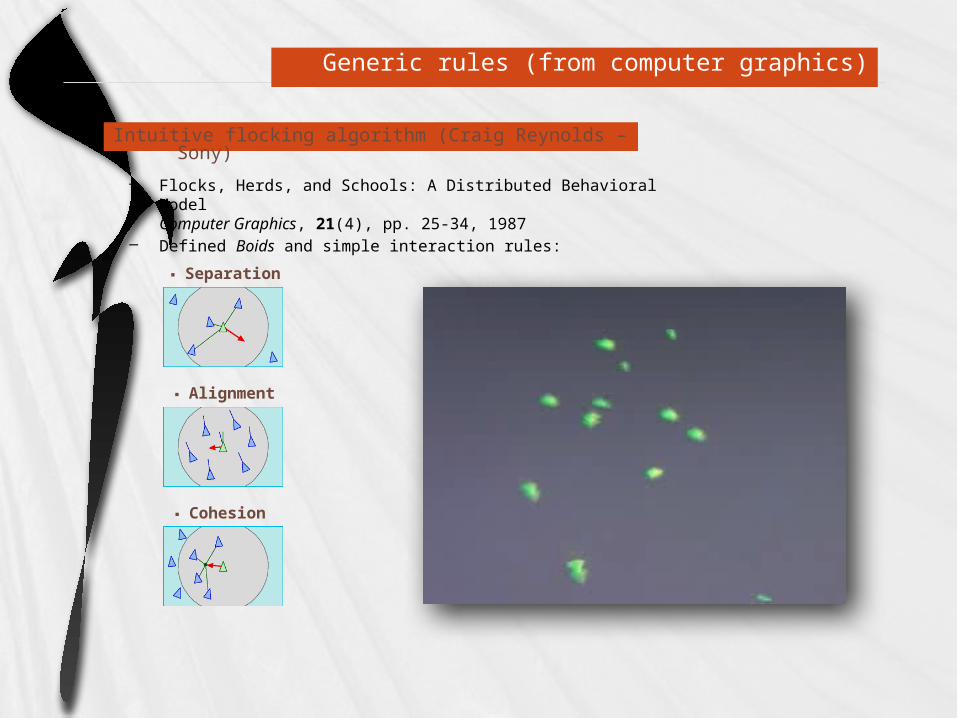
Intuitive flocking algorithm (Craig Reynolds – Sony)
Generic rules (from computer graphics)
– Flocks, Herds, and Schools: A Distributed Behavioral Model Computer Graphics, 21(4), pp. 25-34, 1987
– Defined Boids and simple interaction rules:
▪ Separation
▪ Alignment
▪ Cohesion
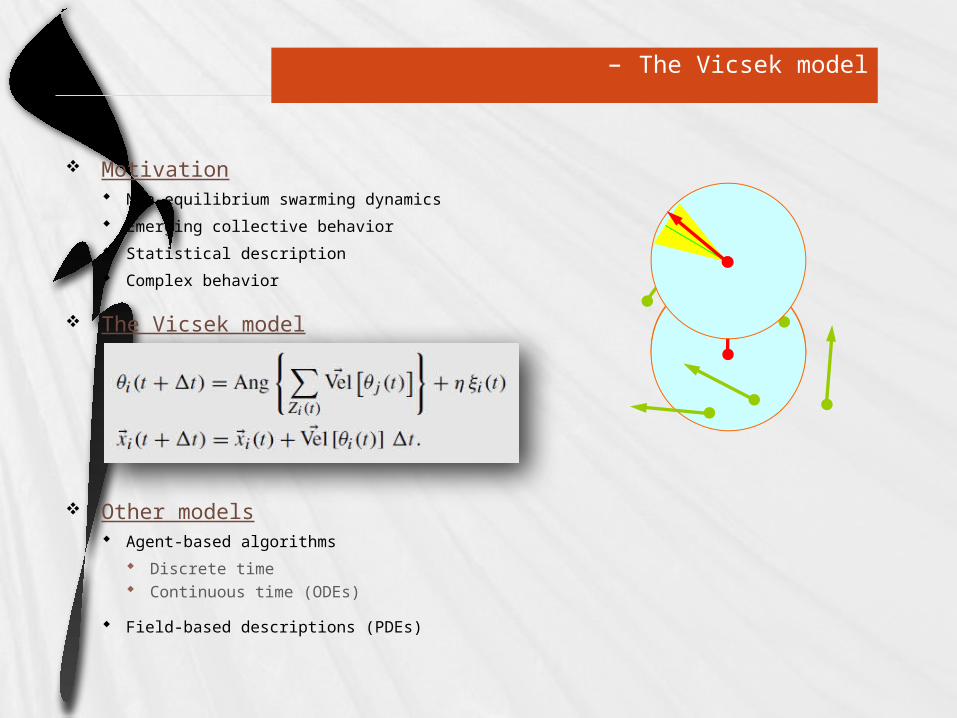
Motivation Non-equilibrium swarming dynamics
Emerging collective behavior
Statistical description
Complex behavior
The Vicsek model
Other models Agent-based algorithms
Discrete time Continuous time (ODEs)
Field-based descriptions (PDEs)
– The Vicsek model
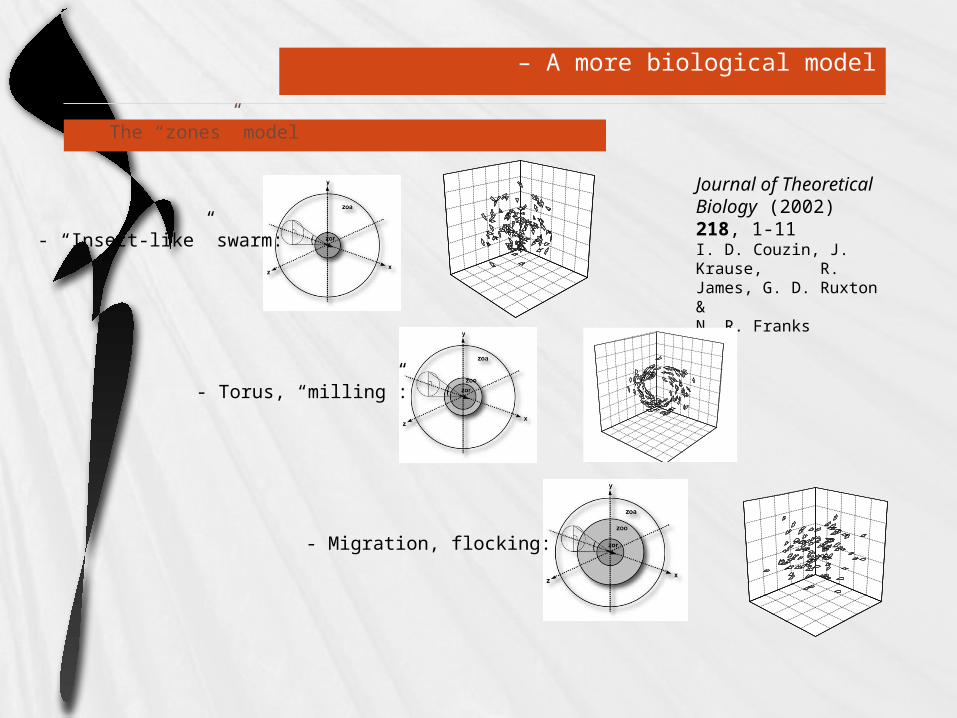
The “zones” model
– A more biological model
Journal of Theoretical Biology (2002) 218, 1-11I. D. Couzin, J. Krause, R. James, G. D. Ruxton &N. R. Franks
- “Insect-like” swarm:
- Torus, “milling”:
- Migration, flocking:
Different algorithms yield similar collective motion
What interactions are animal swarms actually using?
Are we making underlying assumptions?
In other words:
Can we properly address the inverse problem?
- Challenge: The inverse problem
Outline
• Overview Background Some basic models of collective
motion Challenge: The inverse problem
• A detailed effective-force analysis Fish schooling: quasi 2D
experiments Model-free approach Effective-forces: results
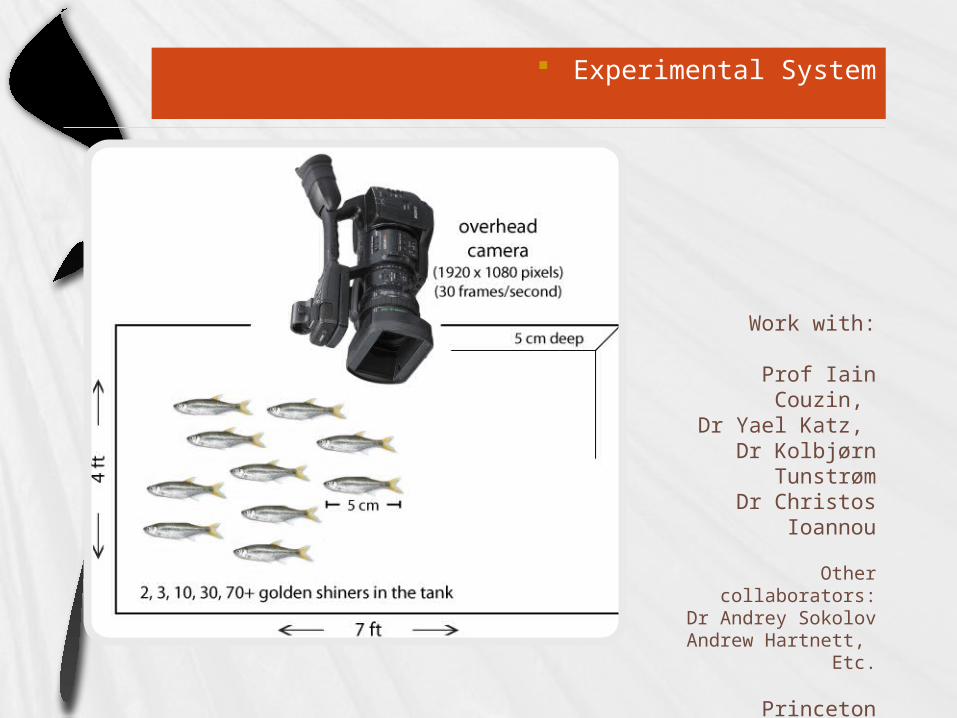
Experimental System
Work with:
Prof Iain Couzin, Dr Yael Katz,
Dr Kolbjørn Tunstrøm
Dr Christos Ioannou
Other collaborators:Dr Andrey SokolovAndrew Hartnett,
Etc.
Princeton University

1000 fish dynamics
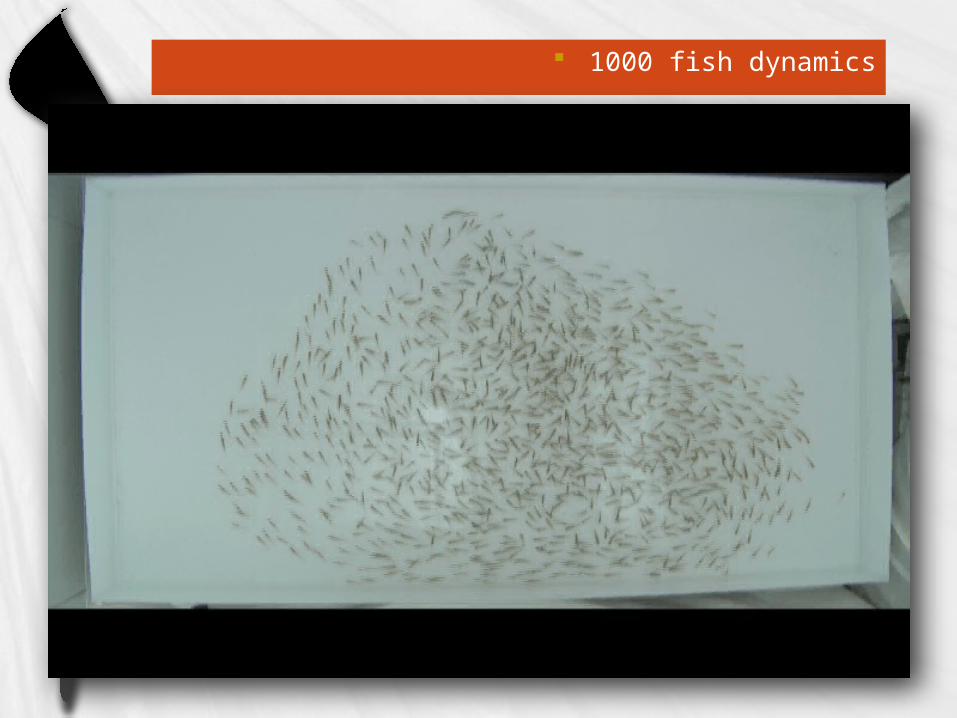
1000 fish dynamics
Method Measure mean effective forces on 2-fish & 3-fish systems Use large dataset: 14 experiments of 56 minutes each Use classical mechanics formalism (force-driven systems)
F=ma & trajectories given by (q,p) per degree of freedom
Goals “Model-free” approach on clear mathematical grounds Gain intuition over multiple possible dynamical
dependencies Study deviations from classical mechanics
Memory, higher-order interactions, etc.
Other methods Maximum entropy Bayesian inference
The effective-force approach
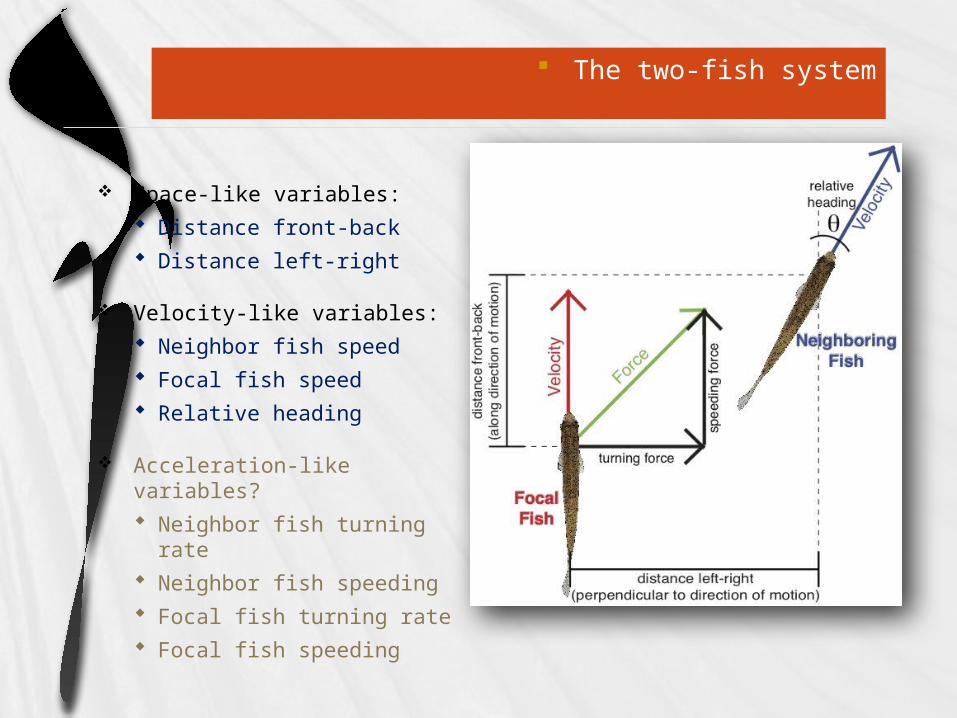
Space-like variables: Distance front-back Distance left-right
Velocity-like variables: Neighbor fish speed Focal fish speed Relative heading
Acceleration-like variables? Neighbor fish turning rate Neighbor fish speeding Focal fish turning rate Focal fish speeding
The two-fish system
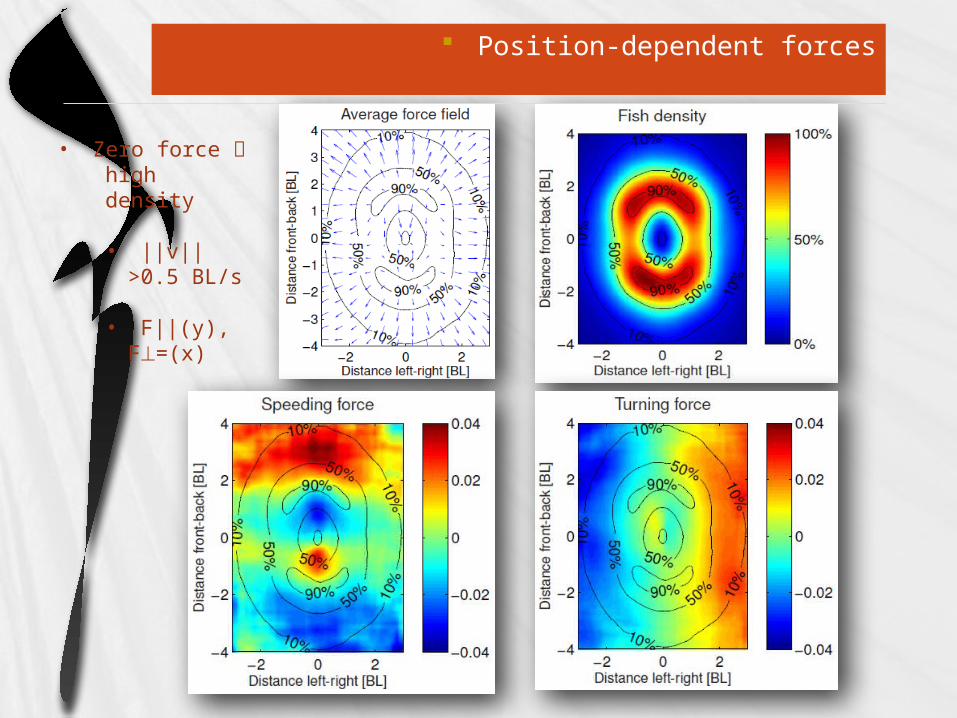
Position-dependent forces
• Zero force high density
• ||v||>0.5 BL/s
• F||(y), F=(x)
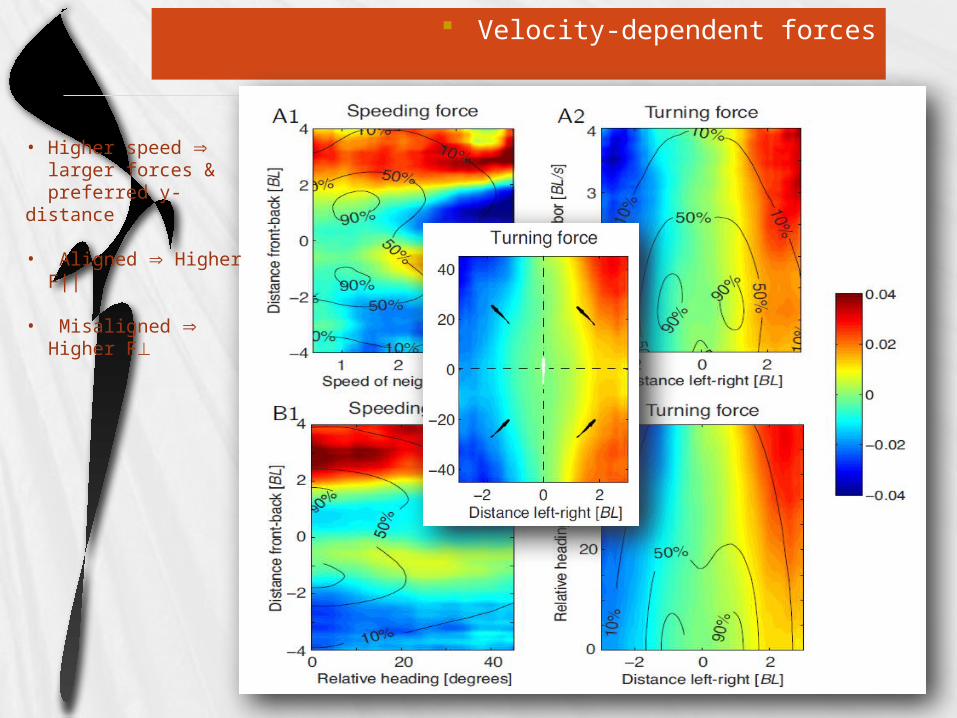
Velocity-dependent forces
• Higher speed larger forces & preferred y-distance
• Aligned Higher F||
• Misaligned Higher F
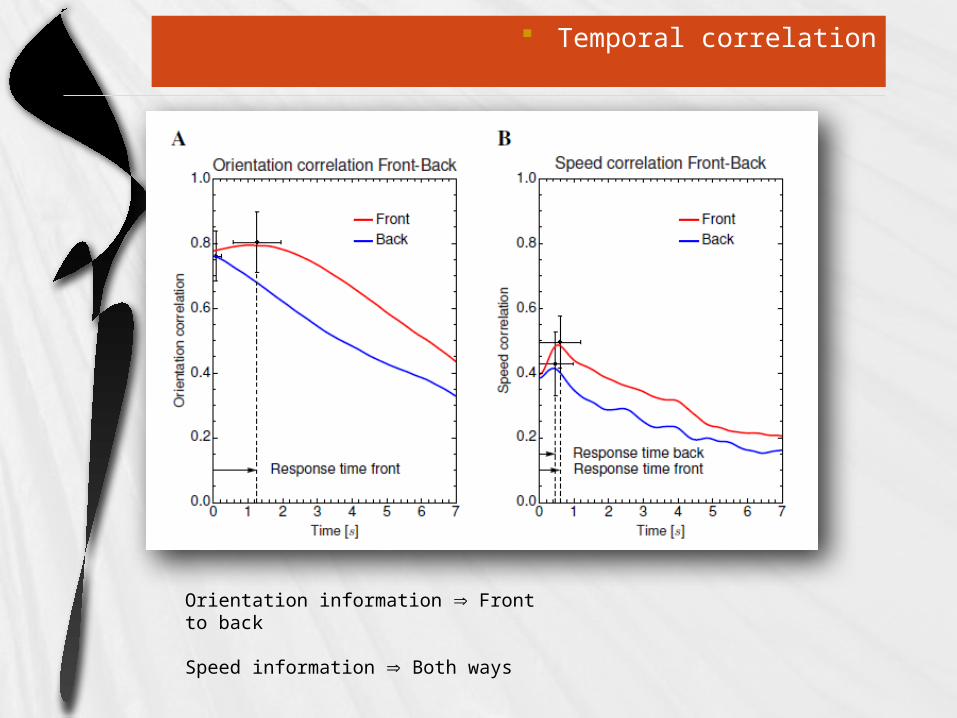
Temporal correlation
Orientation information Front to back
Speed information Both ways
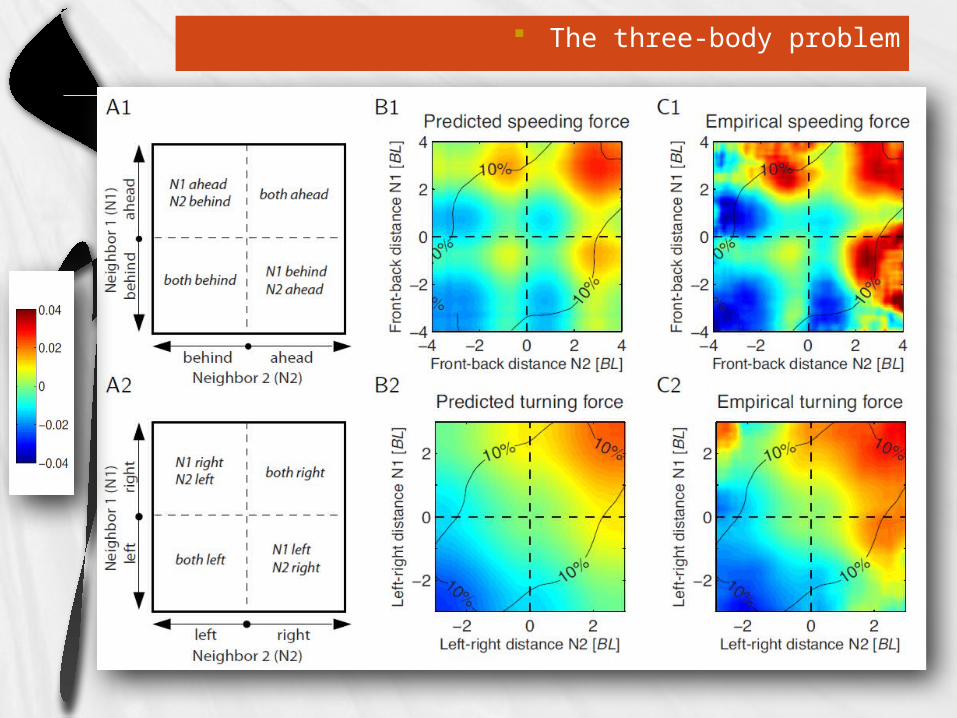
The three-body problem
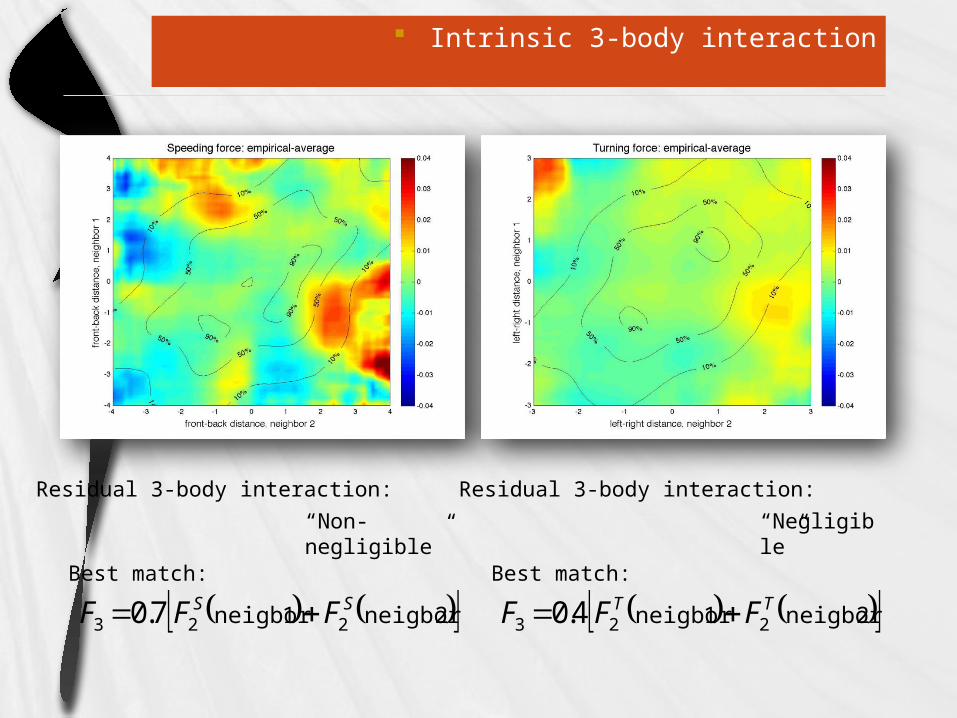
Intrinsic 3-body interaction
Best match:
2neigbor 1neigbor 223 7.0 SS FFF 2neigbor 1neigbor 223 4.0 TT FFF
Residual 3-body interaction:
“Non-negligible” “Negligible”
Best match:
Residual 3-body interaction:
Conclusions
Using an effective-force approach we found that:
Within the interaction zone, speeding depends mainly on front-back distance, and turning on left-right distance
Trailing fish turn to follow fish in front but adjust speed to follow neighbors in front or behind
Alignment emerges from attraction/repulsion interactions: No evidence for explicit alignment
Tuning response is approximately averaged while speeding is between averaging and additive
Speeding response follows no linear superposition principle: Residual intrinsic three-body interaction
New models and simulations to analyze
New statistical/emergent properties to find … Fin

… Fin