initiation à la propagation des...
TRANSCRIPT
Initiation à la propagation des incertitudes
Pascal [email protected]
Laboratoire de Chimie Physique, OrsayRéseau National �Mesures, Modèles et Incertitudes�
March 24, 2015
P. Pernot Propagation des incertitudes March 24, 2015 1 / 118
Sommaire
1 Mesures et incertitudes
2 Représentation probabiliste des incertitudes
3 Bases théoriques de la propagation des incertitudes
4 Combinaison des variances
5 Propagation des distributions
6 Analyse Globale de Sensibilité
7 Présentation des résultats
8 Compléments
P. Pernot Propagation des incertitudes March 24, 2015 2 / 118
Sommaire
1 Mesures et incertitudes
2 Représentation probabiliste des incertitudes
3 Bases théoriques de la propagation des incertitudes
4 Combinaison des variances
5 Propagation des distributions
6 Analyse Globale de Sensibilité
7 Présentation des résultats
8 Compléments
P. Pernot Propagation des incertitudes March 24, 2015 3 / 118
Mesures et incertitudes
Mesurer,c'est comparer une grandeur physique inconnue
avec une grandeur de même natureprise comme référence,
à l'aide d'une chaîne instrumentalecomportant un ou plusieurs capteurs.
C'est exprimer le résultat de cette comparaisonà l'aide d'une valeur numérique,
associée à une unité qui rappelle la nature de la référence,et assortie d'une incertitude qui dépend à la fois
des qualités de l'expérience e�ectuée,des outils employés et de la connaissance qu'on ade la référence et de ses conditions d'utilisation.
M. Himbert (1993) Bulletin du Bureau National de Métrologie 93:1.
P. Pernot Propagation des incertitudes March 24, 2015 3 / 118
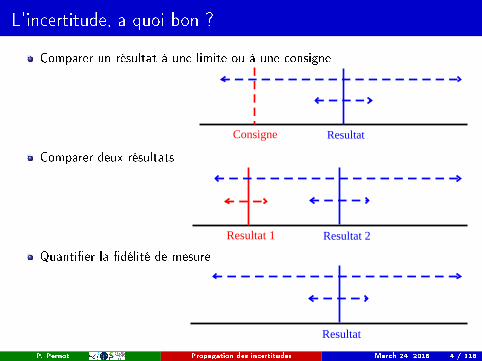
L'incertitude, a quoi bon ?
Comparer un résultat à une limite ou à une consigne
Consigne Resultat
Comparer deux résultats
Resultat 1 Resultat 2
Quanti�er la �délité de mesure
Resultat
P. Pernot Propagation des incertitudes March 24, 2015 4 / 118
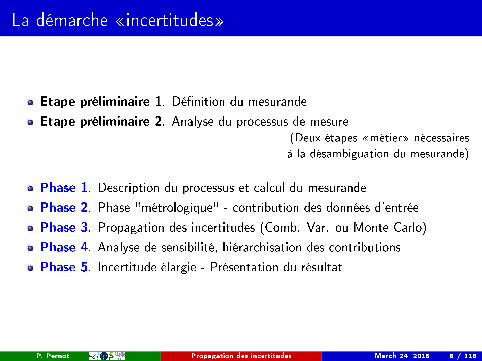
La démarche �incertitudes�
Etape préliminaire 1. Dé�nition du mesurande
Etape préliminaire 2. Analyse du processus de mesure(Deux étapes �métier� nécessaires
à la désambiguation du mesurande)
Phase 1. Description du processus et calcul du mesurande
Phase 2. Phase "métrologique" - contribution des données d'entrée
Phase 3. Propagation des incertitudes (Comb. Var. ou Monte Carlo)
Phase 4. Analyse de sensibilité, hiérarchisation des contributions
Phase 5. Incertitude élargie - Présentation du résultat
P. Pernot Propagation des incertitudes March 24, 2015 5 / 118
Etapes préliminaires - Exemple
Mesurer la surface de votre table...
P. Pernot Propagation des incertitudes March 24, 2015 6 / 118
Sommaire
1 Mesures et incertitudes
2 Représentation probabiliste des incertitudes
3 Bases théoriques de la propagation des incertitudes
4 Combinaison des variances
5 Propagation des distributions
6 Analyse Globale de Sensibilité
7 Présentation des résultats
8 Compléments
P. Pernot Propagation des incertitudes March 24, 2015 7 / 118
Incertitude et probabilité
Quanti�cation de l'incertitude (P-S. Laplace, ca. 1800)
on peut attribuer un �degré de con�ance� p(X = x)à chaque valeur possible x d'une quantité incertaine X
cohérence et normalisation ⇒p(X = x) obéit auxrègles de la théorie des probabilités
Cette démarche est adoptée dans le GUM (3.3.1)
l'incertitude de mesure re�ète le manque de connaissancesur la valeur exacte du mesurande.
l'état des connaissance correspondant est décrit au mieux parune distribution sur l'ensemble des valeurs possibles du mesurande.
P. Pernot Propagation des incertitudes March 24, 2015 7 / 118
Les densités de probabilité
Si dx est un nombre réel positif in�niment petit, alors la probabilité que la valeurde la variable X soit incluse dans l'intervalle [x , x + dx ] est égale à p(x)dx , soit
P (x < X < x + dx) = p (x) dx
Pour une variable continue prenant ses valeurs dans l'intervalle [xmin, xmax ], ladensité de probabilité p(x) véri�e les propriétés suivantes :
positivitép(x) ≥ 0
normalisation à l'unité ˆ xmax
xmin
dx p(x) = 1
P. Pernot Propagation des incertitudes March 24, 2015 8 / 118
Les densités de probabilité
Quelques rappels:
probabilité (massique) pour que X se trouve dans un intervalle [a, b]
P(a ≤ X ≤ b) =
ˆ b
a
dx p(x)
valeur moyenne
x = E(X ) =
ˆ xmax
xmin
dx x p(x)
variance
σ2X =
ˆ xmax
xmin
dx (x − x)2 p(x)
entropie de Shannon
H(p) = −ˆ xmax
xmin
dx ln p(x) p(x)
P. Pernot Propagation des incertitudes March 24, 2015 9 / 118
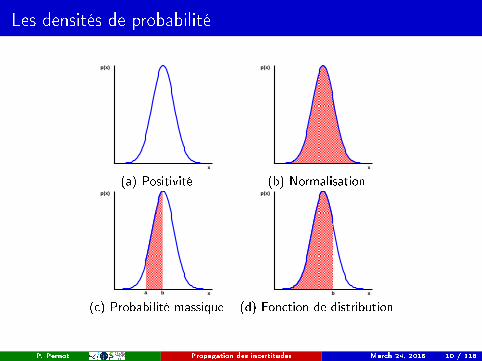
Les densités de probabilité
x
p(x)
x
p(x)
(a) Positivité (b) Normalisation
x
p(x)
a b x
p(x)
b
(c) Probabilité massique (d) Fonction de distribution
P. Pernot Propagation des incertitudes March 24, 2015 10 / 118

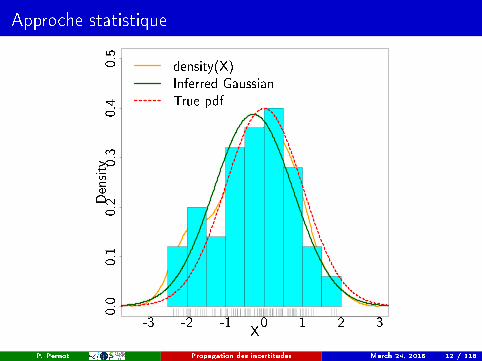
Représenter un jeu d'informations par une pdfApproche statistique
Lorsqu'on dispose d'un échantillon représentatif de la variable X , on a plusieurssolutions pour dé�nir une densité de probabilité:
approche directe: construction d'une densité de probabilité approchée à partirde l'échantillon (nécessite un grand nombre de points):
histogrammesméthode des noyaux
approche inverse: inférer la densité de probabilité (en général supposéesimple) ayant permis de générer l'échantillon.
Remarque: pour la mise en oeuvre de la méthode de propagation desdistributions par Monte-Carlo, on a seulement besoin d'un moyen numérique pourgénérer des échantillons représentatifs; il n'est pas nécessaire d'établir uneexpression analytique de la densité de probabilité.
P. Pernot Propagation des incertitudes March 24, 2015 11 / 118
Approche statistique
-3 -2 -1 0 1 2 3
0.0
0.1
0.2
0.3
0.4
0.5
X
Den
sity
density(X)Inferred GaussianTrue pdf
P. Pernot Propagation des incertitudes March 24, 2015 12 / 118
Dé�nir une pdf à partir des informations disponiblesApproche informationnelle
Si on ne dispose que d'informations partielles (p. ex. une valeur moyenne et unécart type), il existe une in�nité de densités de probabilité pouvant les reproduire.
Le Principe du Maximum d'Entropie (Maxent) spéci�e que parmi toute cesdistributions, on doit retenir celle qui maximise l'entropie de Shannon
H(p) = −ˆ
dx ln p(x) p(x)
avec les contraintes imposées par les informations disponibles. C'est la distributionla moins informative (celle qui minimise l'information statistique), compte tenudes contraintes.
Rq: la mise en oeuvre (analytique ou numérique) est hors du propos de laformation, mais nous mentionnerons ce principe à plusieurs occasions.
P. Pernot Propagation des incertitudes March 24, 2015 13 / 118

Variation de l'entropie avec la forme de distribution
-4 -2 0 2 4 6
0.0
0.2
0.4
0.6
0.8
1.0
Distributions avec mean=1 et st. dev. =1
X
Normale; S=1.7
Uniforme; S=1.2
Exponentielle; S=1
0.0 0.5 1.0 1.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
Quelques PDFs sur [0,1]
X
Uniforme; S= 0
Triangular; S= -0.19
Arcsine; S= -0.24
P. Pernot Propagation des incertitudes March 24, 2015 14 / 118

Quelques distributions d'entropie maximale
P. Pernot Propagation des incertitudes March 24, 2015 15 / 118
Dé�nir une pdf à partir des informations disponiblesDocuments de référence
E.T. Jaynes (1957) Information theory and statistical mechanics. PhysicalReview 106:620�630.http://bayes.wustl.edu/etj/articles/theory.1.pdf
Le père fondateur...
S.Y. Park and A.K. Bera (2009). Maximum entropy autoregressiveconditional heteroskedasticity model. Journal of Econometrics 150:219�230.http://www.wise.xmu.edu.cn/UploadFiles/paper-masterdownload/
2009519932327055475115776.pdf
Contient une table pratique des densités d'entropie maximale les plus utiles.
A. O'Hagan (2014) Eliciting and using expert knowledge in metrology.Metrologia 51:S237-S244.http://dx.doi.org/10.1088/0026-1394/51/4/S237
Critique argumentée de Maxent.
P. Pernot Propagation des incertitudes March 24, 2015 16 / 118

Pdf uniforme/rectangulaire x ∼ Unif (a, b)
Propriétés
x ∈ [a, b] ⇒ p(x |a, b) =1
b − a
x /∈ [a, b] ⇒ p(x |a, b) = 0
x =a + b
2; ux =
1√3
b − a
2; S = ln(b − a)
UtilisationOn ne dispose que des bornes de X ,sans indications sur une valeur préférée.
Unif (a, b) est la distribution d'entropie
maximale parmi toutes les distributions
continues sur [a, b].
a b<x> =(a+b)/2
0
1/(b-a)
b-a
P. Pernot Propagation des incertitudes March 24, 2015 17 / 118

Pdf triangulaire x ∼ Tri(a, b)
Propriétés
x ∈ [a, c] ⇒ p(x |a, b) =(x − a)
(b − a)2
x ∈ [c, b] ⇒ p(x |a, b) =(b − x)
(b − a)2
x /∈ [a, b] ⇒ p(x |a, b) = 0
x = c =a + b
2; ux =
1√6
b − a
2; S =
1
2+ln
„b − a
2
«Utilisation
on dispose des limites de X et d'une
valeur préférée au centre de l'intervallea b
<x>=(a+b)/2
0
2/(b-a)
(b-a)
P. Pernot Propagation des incertitudes March 24, 2015 18 / 118

Pdf triangulaire x ∼ Tri(a, b, c)
Propriétés
x ∈ [a, c] ⇒ p(x |a, b, c) =2(x − a)
(b − a)(c − a)
x ∈ [c, b] ⇒ p(x |a, b, c) =2(b − x)
(b − a)(b − c)
x /∈ [a, b] ⇒ p(x |a, b, c) = 0
x =a + b + c
3; ux =
√a2 + b2 + c2 − ab − ac − bc
3√2
Utilisation
on dispose des limites de X et d'une
valeur préféréea c b
<x>=(a+b+c)/3
0
2/(b-a)
P. Pernot Propagation des incertitudes March 24, 2015 19 / 118

Pdf dérivée d'arc-sinus x ∼ Arcsin(a, b)
Propriétés
x ∈ [a, b] ⇒ p(x |a, b) =1
πp
(x − a)(b − x)
x /∈ [a, b] ⇒ p(x |a, b) = 0
x =a + b
2; ux =
1√2
b − a
2
Utilisationvariation sinusoïdale de X entre deuxlimites a et b.
le nom vient de la densité cumulée
F (x) =2
πarcsin
„rx − a
b − a
« a b<x>=(a+b)/2
P. Pernot Propagation des incertitudes March 24, 2015 20 / 118
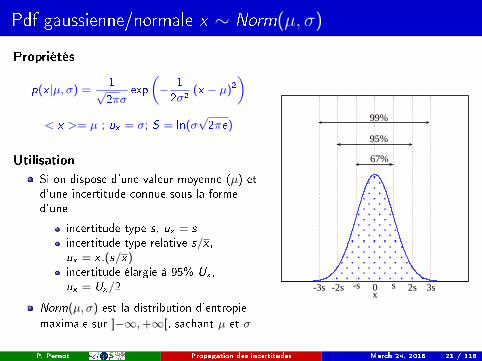
Pdf gaussienne/normale x ∼ Norm(µ, σ)
Propriétés
p(x |µ, σ) =1√2πσ
exp
„− 1
2σ2(x − µ)2
«< x >= µ ; ux = σ; S = ln(σ
√2πe)
UtilisationSi on dispose d'une valeur moyenne (µ) etd'une incertitude connue sous la formed'une
incertitude type s, ux = s
incertitude-type relative s/x ,ux = x .(s/x)incertitude élargie à 95% Ux ,ux = Ux/2
Norm(µ, σ) est la distribution d'entropie
maximale sur ]−∞,+∞[, sachant µ et σ
-2s -s 0 s 2s-3s 3sx
67%
95%
99%
P. Pernot Propagation des incertitudes March 24, 2015 21 / 118
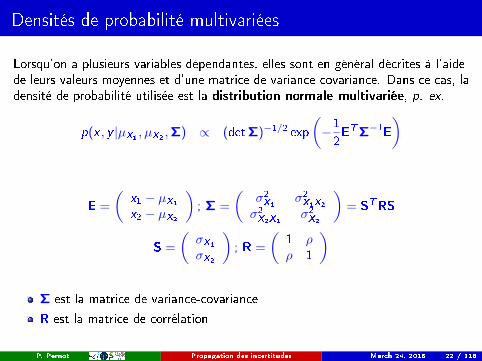
Densités de probabilité multivariées
Lorsqu'on a plusieurs variables dépendantes, elles sont en général décrites à l'aidede leurs valeurs moyennes et d'une matrice de variance-covariance. Dans ce cas, ladensité de probabilité utilisée est la distribution normale multivariée, p. ex.
p(x , y |µX1 , µX2 ,Σ) ∝ (detΣ)−1/2 exp
(−12ETΣ−1E
)
E =
(x1 − µX1
x2 − µX2
); Σ =
(σ2X1
σ2X1X2
σ2X2X1σ2X2
)= STRS
S =
(σX1
σX2
); R =
(1 ρρ 1
)
Σ est la matrice de variance-covariance
R est la matrice de corrélation
P. Pernot Propagation des incertitudes March 24, 2015 22 / 118
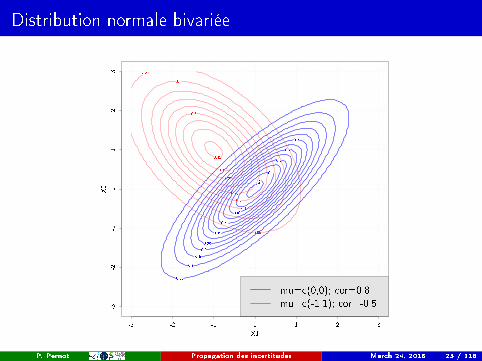
Distribution normale bivariée
X1
X2
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
-3 -2 -1 0 1 2 3
-3-2
-10
12
3
0.05
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
mu=c(0,0); cor=0.8
mu=c(-1,1); cor=-0.5
P. Pernot Propagation des incertitudes March 24, 2015 23 / 118
Variables incertaines avec contraintes
Introduire le maximum de contraintes pertinentesdans la représentation des variables incertaines
Cas des lois de conservation
N variables telles quePN
i=1Xi = 1 et {Xi ≥ 0; i = 1,N},
on utilise la distribution de Dirichlet (Maxent)
{X1, . . . ,XN} ∼ Diri (γ ∗ (µ1, . . . , µN))
où γ > 0 est un facteur de précision (la variance augmente lorsque γ diminue)
exemples: composition chimique, rapports de branchement...
mots-clés pour la littérature: Compositional Data Analysis
P. Pernot Propagation des incertitudes March 24, 2015 24 / 118
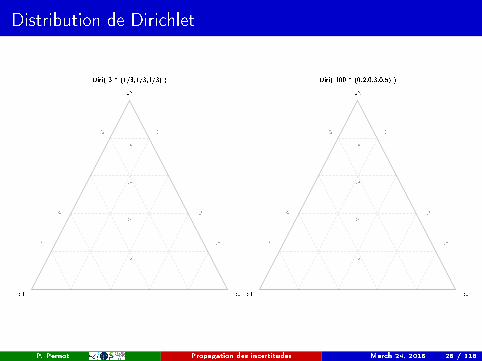
Distribution de Dirichlet
Diri( 3 * (1/3,1/3,1/3) )
x1 x2
x3
0.8
0.6
0.4
0.2
0.8
0.6
0.4
0.2
0.8
0.6
0.4
0.2
Diri( 100 * (0.2,0.3,0.5) )
x1 x2
x3
0.8
0.6
0.4
0.2
0.8
0.6
0.4
0.2
0.8
0.6
0.4
0.2
P. Pernot Propagation des incertitudes March 24, 2015 25 / 118

Sommaire
1 Mesures et incertitudes
2 Représentation probabiliste des incertitudes
3 Bases théoriques de la propagation des incertitudes
4 Combinaison des variances
5 Propagation des distributions
6 Analyse Globale de Sensibilité
7 Présentation des résultats
8 Compléments
P. Pernot Propagation des incertitudes March 24, 2015 26 / 118
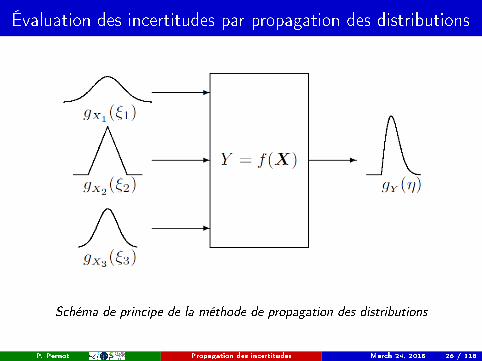
Évaluation des incertitudes par propagation des distributions
Schéma de principe de la méthode de propagation des distributions
P. Pernot Propagation des incertitudes March 24, 2015 26 / 118

Théorie probabiliste de la propagation des incertitudes
(1) Formulation1 identi�cation des variables d'entrée incertaines X = {X1, ...,Xk}
2 dé�nition du modèle Y = f (X)
3 dé�nition de la densité de probabilité jointe des variables d'entréegX1,...,Xk (ξ1, . . . , ξk)
(2) Propagation des distributions (Équation de Markov)1
gY (η) =
ˆdξ1 . . . dξk δ (η − f (ξ1, . . . , ξk)) gX1,...,Xk
(ξ1, . . . , ξk)
1Interprétation: on prend tous les points dans l'espace des ξξξ dont l'image par F vaut η, et onsomme leurs poids donnés par gX (ξξξ). La discrétisation de cette intégrale nous donne une recettepour bâtir un histogramme représentatif de gY .
P. Pernot Propagation des incertitudes March 24, 2015 27 / 118

Théorie probabiliste de la propagation des incertitudes
(1) Formulation1 identi�cation des variables d'entrée incertaines X = {X1, ...,Xk}
2 dé�nition du modèle Y = f (X)
3 dé�nition de la densité de probabilité jointe des variables d'entréegX1,...,Xk (ξ1, . . . , ξk)
(2) Propagation des distributions (Équation de Markov)1
gY (η) =
ˆdξ1 . . . dξk δ (η − f (ξ1, . . . , ξk)) gX1,...,Xk
(ξ1, . . . , ξk)
1Interprétation: on prend tous les points dans l'espace des ξξξ dont l'image par F vaut η, et onsomme leurs poids donnés par gX (ξξξ). La discrétisation de cette intégrale nous donne une recettepour bâtir un histogramme représentatif de gY .
P. Pernot Propagation des incertitudes March 24, 2015 27 / 118

Évaluation des incertitudes par propagation des distributions
(3) Résumés statistiques de gY (η)
1 espérance statistique de Y et son écart type
E(Y ) =
ˆ ∞−∞
dη η gY (η)
u(y) =pV (Y ) ; V (Y ) =
ˆ ∞−∞
dη (η − E(Y ))2 gY (η)
2 et/ou intervalle élargi 100p%, contenant Y avec une probabilité p spéci�éeˆG−1Y (α) ; G−1Y (p + α)
˜; 0 ≤ α ≤ 1− p
où GY (η) est la fonction de distribution de Y
GY (η) =
ˆ η
−∞dz gY (z).
P. Pernot Propagation des incertitudes March 24, 2015 28 / 118
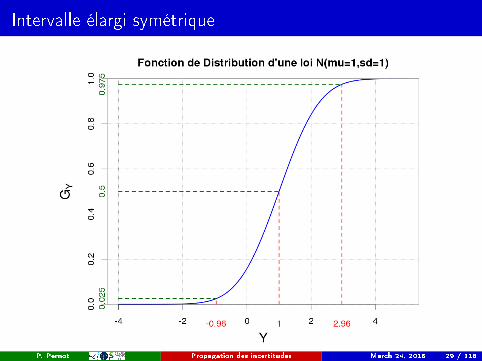
Intervalle élargi symétrique
P. Pernot Propagation des incertitudes March 24, 2015 29 / 118

Intervalle élargi non-symétrique
P. Pernot Propagation des incertitudes March 24, 2015 30 / 118
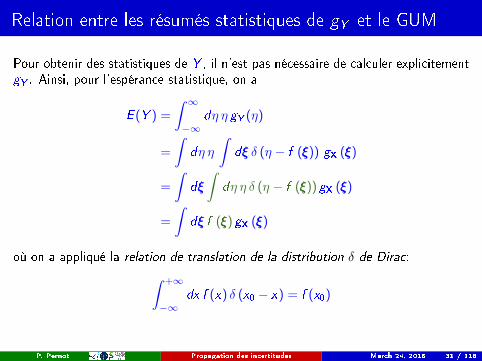
Relation entre les résumés statistiques de gY et le GUM
Pour obtenir des statistiques de Y , il n'est pas nécessaire de calculer explicitementgY . Ainsi, pour l'espérance statistique, on a
E (Y ) =
ˆ ∞−∞
dη η gY (η)
=
ˆdη η
ˆdξξξ δ (η − f (ξξξ)) gX (ξξξ)
=
ˆdξξξ
ˆdη η δ (η − f (ξξξ)) gX (ξξξ)
=
ˆdξξξ f (ξξξ) gX (ξξξ)
où on a appliqué la relation de translation de la distribution δ de Dirac:
ˆ +∞
−∞dx f (x) δ (x0 − x) = f (x0)
P. Pernot Propagation des incertitudes March 24, 2015 31 / 118
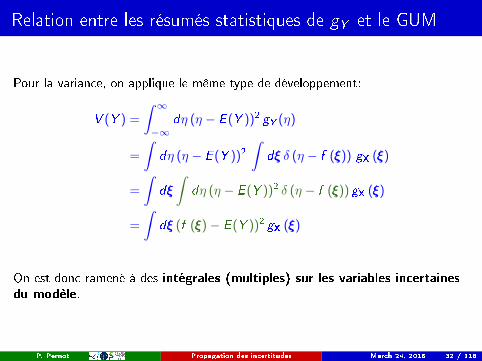
Relation entre les résumés statistiques de gY et le GUM
Pour la variance, on applique le même type de développement:
V (Y ) =
ˆ ∞−∞
dη (η − E (Y ))2 gY (η)
=
ˆdη (η − E (Y ))2
ˆdξξξ δ (η − f (ξξξ)) gX (ξξξ)
=
ˆdξξξ
ˆdη (η − E (Y ))2 δ (η − f (ξξξ)) gX (ξξξ)
=
ˆdξξξ (f (ξξξ)− E (Y ))2 gX (ξξξ)
On est donc ramené à des intégrales (multiples) sur les variables incertainesdu modèle.
P. Pernot Propagation des incertitudes March 24, 2015 32 / 118

Le cas des modèles linéaires
Si on considère un modèle linéaire, ou bien le développement en série de Taylor aupremier ordre d'un modèle quelconque autour d'un point xxx0, on peut écrire
f (ξξξ) = f (xxx0) + JJJT .(ξξξ − xxx0) (1)
où les coe�cients de sensibilité Ji sont donnés par les dérivées premières dumodèle au point xxx0
Ji =∂f (ξξξ)
∂ξi
∣∣∣∣ξξξ=xxx0
d'où
E (Y ) =
ˆdξξξ[F (xxx0) + JJJT .(ξξξ − xxx0)
]gX (ξξξ)
= F (xxx0)
ˆdξξξ gX (ξξξ) +
∑i
Ji
ˆdξξξ (ξi − x0,i ) gX (ξξξ)
= F (xxx0) +∑i
Ji (E (Xi )− x0,i )
Si on choisit xxx0 = E (XXX ), on obtient E (Y ) = f (E (X)).P. Pernot Propagation des incertitudes March 24, 2015 33 / 118

Le cas des modèles linéaires
Dans cette hypothèse, on peut dériver la variance
V (Y ) =
ˆdξξξ[f (E (X)) + JJJT .(ξξξ − E (X))− f (E (X))
]2gX (ξξξ)
=
ˆdξξξ[JJJT .(ξξξ − E (X))
]2gX (ξξξ)
=∑i,j
JiJj
ˆdξξξ (ξi − E (Xi )) (ξj − E (Xj)) gX (ξξξ)
=∑i,j
Ji u(Xi ,Xj) Jj
= JJJT .Σ.JJJ
où Σ est la matrice de variance-covariance des variables d'entrée, telle queΣi,j = u(Xi ,Xj).
Ce résultat est la notation matricielle de l'équation de combinaison des variances.
P. Pernot Propagation des incertitudes March 24, 2015 34 / 118

Sommaire
1 Mesures et incertitudes
2 Représentation probabiliste des incertitudes
3 Bases théoriques de la propagation des incertitudes
4 Combinaison des variances
5 Propagation des distributions
6 Analyse Globale de Sensibilité
7 Présentation des résultats
8 Compléments
P. Pernot Propagation des incertitudes March 24, 2015 35 / 118
La méthode GUM de combinaison des variances
Procédure normalisée pour gérer les incertitudes associées à une mesure(Évaluation des données de mesure � Guide pour l'expression de l'incertitude demesure. JCGM 100:2008,http://www.bipm.org/utils/common/documents/jcgm/JCGM_100_2008_F.pdf).
1 Identi�er les sources d'incertitudeÉvaluation de l'ensemble des sources d'incertitudes a�ectant une mesure
2 Caractériser les incertitudesLes incertitudes sont de deux types :
1 Type A : incertitudes obtenues par analyse statistique d'un ensemble demesurages répétés d'un même mesurande
2 Type B : tout le reste
3 Estimer les incertitudes-type4 Propager/combiner les variances
Estimation de l'incertitude sur le résultat de la mesure à partir des sourcesidenti�ées
P. Pernot Propagation des incertitudes March 24, 2015 35 / 118
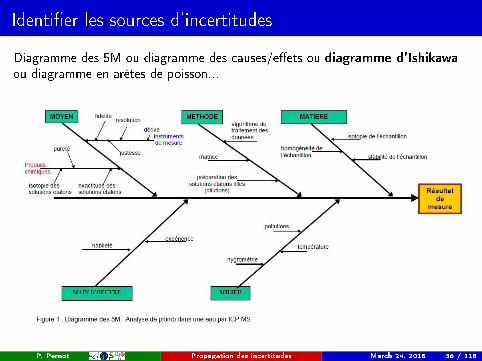
Identi�er les sources d'incertitudes
Diagramme des 5M ou diagramme des causes/e�ets ou diagramme d'Ishikawaou diagramme en arêtes de poisson...
P. Pernot Propagation des incertitudes March 24, 2015 36 / 118

Modèle de mesure
Mesure directeX = x + C
X : valeur du mesurandex : indication(valeur mesurée)C : corrections (justesse, quanti�cation...)
Propriétés dérivéesY = f (X1, ...,Xk)
f : modèle �de connaissance� ou �de comportement�Y : valeur du mesurandeXi : variable d'in�uence
P. Pernot Propagation des incertitudes March 24, 2015 37 / 118
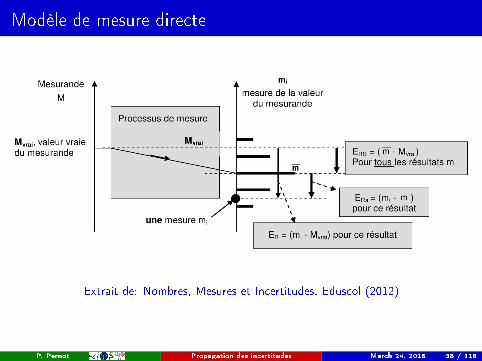
Modèle de mesure directe
Extrait de: Nombres, Mesures et Incertitudes, Eduscol (2012)
P. Pernot Propagation des incertitudes March 24, 2015 38 / 118

Incertitudes de type A
On caractérise un échantillon de mesures (ensemble de mesurages répétés d'unmême mesurande) par:
la Moyenne arithmétique
x =1n
n∑i=1
xi
l'Incertitude type: écart-type expérimental de x
uX =sX√n
où s2X =∑n
i=1(xi − x)2/(n − 1) est la variance expérimentale des
observations.
Rq:
1 ces estimateurs, notamment l'incertitude-type, ne sont pertinents que si ladistribution des erreurs est raisonnablement symétrique
2 le nombre d'observations n doit être su�samment grand pour garantir que x
fournisse une estimation �able de E(X ), et pour que s2X fournisse une estimation�able de la variance.P. Pernot Propagation des incertitudes March 24, 2015 39 / 118
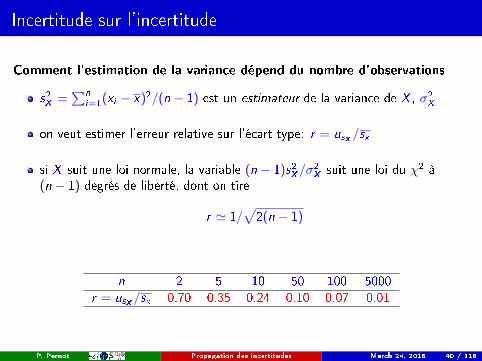
Incertitude sur l'incertitude
Comment l'estimation de la variance dépend du nombre d'observations
s2X =∑n
i=1(xi − x)2/(n − 1) est un estimateur de la variance de X , σ2X
on veut estimer l'erreur relative sur l'écart type: r = usX /sx
si X suit une loi normale, la variable (n − 1)s2X/σ2
X suit une loi du χ2 à(n − 1) degrés de liberté, dont on tire
r ' 1/√2(n − 1)
n 2 5 10 50 100 5000r = usX /sx 0.70 0.35 0.24 0.10 0.07 0.01
P. Pernot Propagation des incertitudes March 24, 2015 40 / 118
Incertitudes de type B
En absence de mesurages répétés, on est en général contraint d'utiliser desinformations collectées sous des formes diverses, tirées de di�érentes sources :
notice des instruments
certi�cats de calibration
limitations d'a�chage...
Le problème est ici de dé�nir une incertitude-type à partir de ces informationssouvent partielles.
La technique recommandée est de dé�nir une densité de probabilité pourreprésenter la distribution plausible des erreurs, et d'utiliser l'incertitude-typecorrespondant à cette densité.
P. Pernot Propagation des incertitudes March 24, 2015 41 / 118
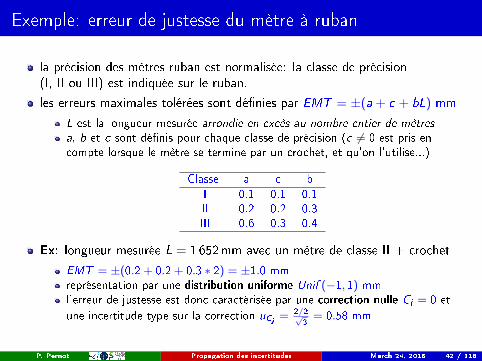
Exemple: erreur de justesse du mètre à ruban
la précision des mètres ruban est normalisée: la classe de précision(I, II ou III) est indiquée sur le ruban.
les erreurs maximales tolérées sont dé�nies par EMT = ±(a + c + bL) mm
L est la longueur mesurée arrondie en excès au nombre entier de mètres
a, b et c sont dé�nis pour chaque classe de précision (c 6= 0 est pris encompte lorsque le mètre se termine par un crochet, et qu'on l'utilise...)
Classe a c b
I 0.1 0.1 0.1II 0.2 0.2 0.3III 0.6 0.3 0.4
Ex: longueur mesurée L = 1 652mm avec un mètre de classe II + crochet
EMT = ±(0.2 + 0.2 + 0.3 ∗ 2) = ±1.0 mmreprésentation par une distribution uniforme Unif (−1, 1) mml'erreur de justesse est donc caractérisée par une correction nulle Cj = 0 et
une incertitude type sur la correction uCj = 2/2√3
= 0.58 mm
P. Pernot Propagation des incertitudes March 24, 2015 42 / 118
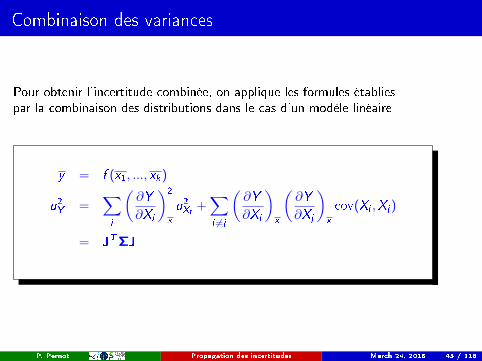
Combinaison des variances
Pour obtenir l'incertitude combinée, on applique les formules établiespar la combinaison des distributions dans le cas d'un modèle linéaire
y = f (x1, ..., xk)
u2Y =∑i
(∂Y
∂Xi
)2
x
u2Xi+∑i 6=j
(∂Y
∂Xi
)x
(∂Y
∂Xj
)x
cov(Xi ,Xj)
= JTΣJ
P. Pernot Propagation des incertitudes March 24, 2015 43 / 118
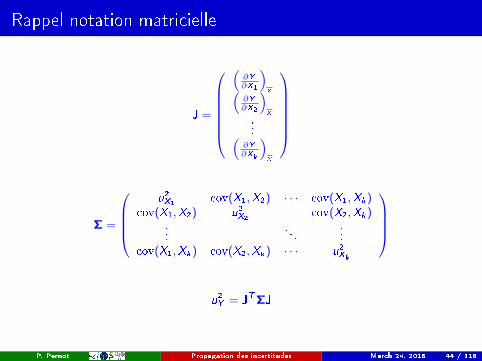
Rappel notation matricielle
J =
0BBBBBB@
“∂Y∂X1
”x“
∂Y∂X2
”x
...“∂Y∂Xk
”x
1CCCCCCA
Σ =
0BBB@u2X1 cov(X1,X2) · · · cov(X1,Xk)
cov(X1,X2) u2X2 cov(X2,Xk)...
. . ....
cov(X1,Xk) cov(X2,Xk) · · · u2Xk
1CCCA
u2Y = JTΣJ
P. Pernot Propagation des incertitudes March 24, 2015 44 / 118
Exemple: longueur de la table
Mesure d'une longueur avec un mètre à ruban de résolution 1 mm.le mesurande est la moyenne de 5 mesures réparties uniformémentsur un côté de la table. On estime la longueur au mm le plus proche.pour chaque mesure on peut écrire
Li = li + Cq,i + Cj + CT
l : indication (longueur lue sur le mètre)Cq : correction de l'erreur de quanti�cation (lecture)Cj : correction de l'erreur de justesse pour la longueur mesuréeCT = Lnomα∆T : correction de température due à la dilatation éventuelle dumètre. On suppose être dans un environnement controlé à 20± 2 °C−1
le modèle du mesurande est donc
L =1
5
5Xi=1
(li + Cq,i ) + Cj + Lnomα∆T
= l + Cq + Cj + Lnomα∆T
P. Pernot Propagation des incertitudes March 24, 2015 45 / 118

Budget des incertitudes pour la longueur
Source d'incertitude Type Loi x ux
l / mm répétabilité de mesure A - l sl/√5
Cq / mm résolution du mètre (1 mm) B Unif 0 0.5/√3/√5
Cj / mm classe du mètre (II) B Unif 0 1/√3
∆T / °C écart de la température du
mètre à la référence (0± 2)
B Arcsin 0 2/√2
α / °C−1 méconnaissance du coe� de
dilatation (11.5± 1.0)10−6B Norm 11.5 10−6 1.0 10−6
Donc au �nal les corrections ne contribuent pas ici à la valeur estimée,mais elles contribuent aux incertitudes
L = l
u2(L) = u2(l) + u2(Cq) + u2(Cj) + L2nomα2u2(∆T )
P. Pernot Propagation des incertitudes March 24, 2015 46 / 118

Application numérique
Valeur Inc_Std. J J2.U2 Anovalm 1.600e+03 1.59e+00 1.00e+00 2.54e+00 0.86cq 0.000e+00 2.58e-01 1.00e+00 6.67e-02 0.02cj 0.000e+00 5.77e-01 1.00e+00 3.33e-01 0.11a 1.150e-05 1.00e-06 0.00e+00 0.00e+00 0.00dt 0.000e+00 1.41e+00 1.84e-02 6.77e-04 0.00Y 1.600e+03 1.71e+00 <� 2.94e+00
## [1] "l = {1604,1603,1597,1596,1599}"
##
## Y = 1599.8 +/- 1.7
##
## Incertitude élargie, facteur=2.78
##
## Y = 1599.8 +/- 4.8
##
## 95 percent C.I. = [1595.0,1604.6]
P. Pernot Propagation des incertitudes March 24, 2015 47 / 118
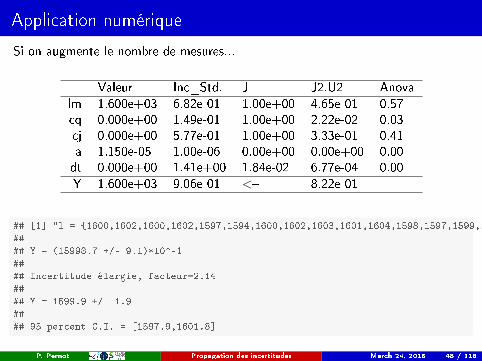
Application numérique
Si on augmente le nombre de mesures...
Valeur Inc_Std. J J2.U2 Anovalm 1.600e+03 6.82e-01 1.00e+00 4.65e-01 0.57cq 0.000e+00 1.49e-01 1.00e+00 2.22e-02 0.03cj 0.000e+00 5.77e-01 1.00e+00 3.33e-01 0.41a 1.150e-05 1.00e-06 0.00e+00 0.00e+00 0.00dt 0.000e+00 1.41e+00 1.84e-02 6.77e-04 0.00Y 1.600e+03 9.06e-01 <� 8.22e-01
## [1] "l = {1600,1602,1600,1602,1597,1594,1600,1602,1603,1601,1604,1598,1597,1599,1599}"
##
## Y = (15998.7 +/- 9.1)*10^-1
##
## Incertitude élargie, facteur=2.14
##
## Y = 1599.9 +/- 1.9
##
## 95 percent C.I. = [1597.9,1601.8]
P. Pernot Propagation des incertitudes March 24, 2015 48 / 118
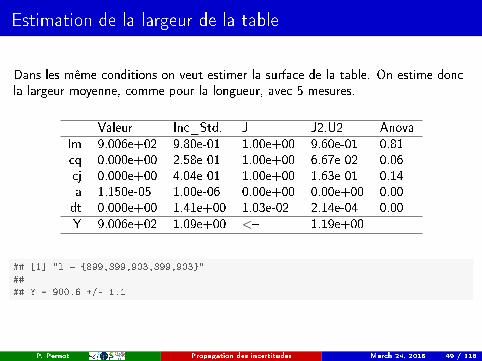
Estimation de la largeur de la table
Dans les même conditions on veut estimer la surface de la table. On estime doncla largeur moyenne, comme pour la longueur, avec 5 mesures.
Valeur Inc_Std. J J2.U2 Anovalm 9.006e+02 9.80e-01 1.00e+00 9.60e-01 0.81cq 0.000e+00 2.58e-01 1.00e+00 6.67e-02 0.06cj 0.000e+00 4.04e-01 1.00e+00 1.63e-01 0.14a 1.150e-05 1.00e-06 0.00e+00 0.00e+00 0.00dt 0.000e+00 1.41e+00 1.03e-02 2.14e-04 0.00Y 9.006e+02 1.09e+00 <� 1.19e+00
## [1] "l = {899,899,903,899,903}"
##
## Y = 900.6 +/- 1.1
P. Pernot Propagation des incertitudes March 24, 2015 49 / 118
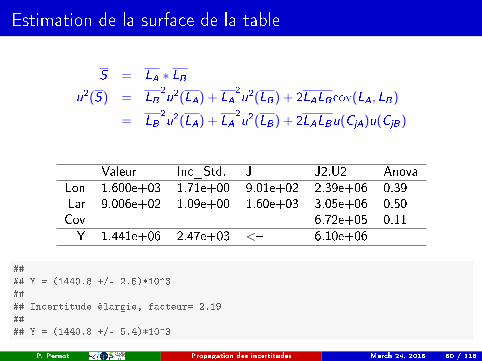
Estimation de la surface de la table
S = LA ∗ LBu2(S) = LB
2
u2(LA) + LA2
u2(LB) + 2LALBcov(LA, LB)
= LB2
u2(LA) + LA2
u2(LB) + 2LALBu(CjA)u(CjB)
Valeur Inc_Std. J J2.U2 AnovaLon 1.600e+03 1.71e+00 9.01e+02 2.39e+06 0.39Lar 9.006e+02 1.09e+00 1.60e+03 3.05e+06 0.50Cov 6.72e+05 0.11Y 1.441e+06 2.47e+03 <� 6.10e+06
##
## Y = (1440.8 +/- 2.5)*10^3
##
## Incertitude élargie, facteur= 2.19
##
## Y = (1440.8 +/- 5.4)*10^3
P. Pernot Propagation des incertitudes March 24, 2015 50 / 118

Combinaison des variances vs. combinaison des incertitudes
Pourquoi on n'utilise pas une formule de la forme uY =∑
i
∣∣∣ ∂Y∂Xi
∣∣∣xi
uXipour
combiner des erreurs aléatoires ?
Théorème de la limite centrée : la somme de variables aléatoires indépendanteset de variance �nie converge vers une loi Normale.
Comme illustré ci-dessous, dès qu'on combine quelques variables aléatoires, unetendance centrale se dégage, et les valeurs extrêmes deviennent nonreprésentatives.
X1 X1 + X2 X1 + X2 + X3 X1 + . . .+ X6
Illustration du théorème de la limite centrée : addition de variables uniformes
Xi ∼ Unif (0, 1)
P. Pernot Propagation des incertitudes March 24, 2015 51 / 118
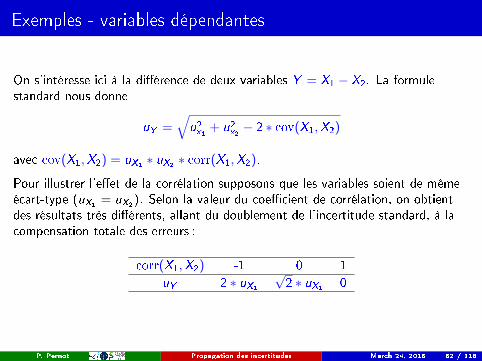
Exemples - variables dépendantes
On s'intéresse ici à la di�érence de deux variables Y = X1 − X2. La formulestandard nous donne
uY =√u2x1 + u2x2 − 2 ∗ cov(X1,X2)
avec cov(X1,X2) = uX1 ∗ uX2 ∗ corr(X1,X2).
Pour illustrer l'e�et de la corrélation supposons que les variables soient de mêmeécart-type (uX1 = uX2). Selon la valeur du coe�cient de corrélation, on obtientdes résultats très di�érents, allant du doublement de l'incertitude standard, à lacompensation totale des erreurs :
corr(X1,X2) -1 0 1uY 2 ∗ uX1
√2 ∗ uX1 0
P. Pernot Propagation des incertitudes March 24, 2015 52 / 118
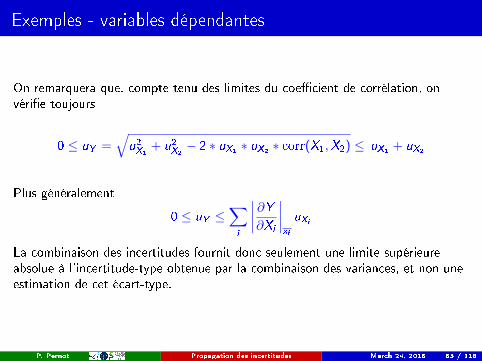
Exemples - variables dépendantes
On remarquera que, compte tenu des limites du coe�cient de corrélation, onvéri�e toujours
0 ≤ uY =√u2X1
+ u2X2− 2 ∗ uX1 ∗ uX2 ∗ corr(X1,X2) ≤ uX1 + uX2
Plus généralement
0 ≤ uY ≤∑i
∣∣∣∣ ∂Y∂Xi
∣∣∣∣xi
uXi
La combinaison des incertitudes fournit donc seulement une limite supérieureabsolue à l'incertitude-type obtenue par la combinaison des variances, et non uneestimation de cet écart-type.
P. Pernot Propagation des incertitudes March 24, 2015 53 / 118
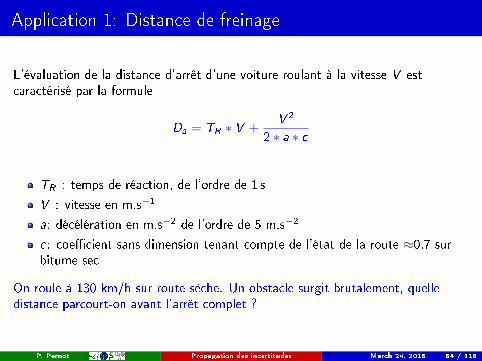
Application 1: Distance de freinage
L'évaluation de la distance d'arrêt d'une voiture roulant à la vitesse V estcaractérisé par la formule
Da = TR ∗ V +V 2
2 ∗ a ∗ c
TR : temps de réaction, de l'ordre de 1 s
V : vitesse en m.s−1
a: décélération en m.s−2 de l'ordre de 5 m.s−2
c: coe�cient sans dimension tenant compte de l'état de la route ≈0.7 surbitume sec
On roule à 130 km/h sur route sèche. Un obstacle surgit brutalement, quelledistance parcourt-on avant l'arrêt complet ?
P. Pernot Propagation des incertitudes March 24, 2015 54 / 118

Application 1: Distance de freinage, suite
Le temps de réaction TR a été estimé lors d'une étude sur de nombreux casd'accidents : le temps minimum est de 0.5 s, mais que ce temps peut allerjusque 1.5 s pour une personne normalement vigilante. On ne dispose pasd'un ensemble de valeurs analysables. Proposer une modélisation du temps deréaction (choix de la loi de densité de probabilité, moyenne, incertitude-type).
Le coe�cient c peut être compris entre 0.3 et 0.8 selon la nature durevêtement et les circonstances: sur route sèche et propre, c est comprisentre 0.6 et 0.8. Modéliser c sous la forme d'une loi de densité de probabilitégaussienne : calculer l'incertitude-type.
V est caractérisée par une incertitude-type de 4 km/h pour tenir compte à lafois de l'indicateur de vitesse et de la vigilance à maintenir la vitesseconstante.
a est caractérisée par une incertitude- type de 0.5m.s−2, pour tenir comptede l'e�cacité du système de freinage et donc de l'état d'entretien du véhicule.
Déduire l'incertitude-type composée, et l'intervalle contenant probablement ladistance d'arrêt. Faire une étude de sensibilité relative.
P. Pernot Propagation des incertitudes March 24, 2015 55 / 118
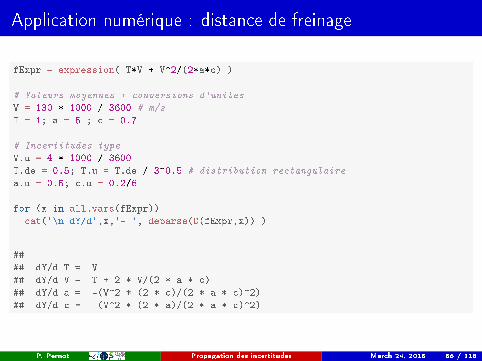
Application numérique : distance de freinage
fExpr = expression( T*V + V^2/(2*a*c) )
# Valeurs moyennes + conversions d'unites
V = 130 * 1000 / 3600 # m/s
T = 1; a = 5 ; c = 0.7
# Incertitudes type
V.u = 4 * 1000 / 3600
T.de = 0.5; T.u = T.de / 3^0.5 # distribution rectangulaire
a.u = 0.5; c.u = 0.2/6
for (x in all.vars(fExpr))
cat('\n dY/d',x,'= ', deparse(D(fExpr,x)) )
##
## dY/d T = V
## dY/d V = T + 2 * V/(2 * a * c)
## dY/d a = -(V^2 * (2 * c)/(2 * a * c)^2)
## dY/d c = -(V^2 * (2 * a)/(2 * a * c)^2)
P. Pernot Propagation des incertitudes March 24, 2015 56 / 118
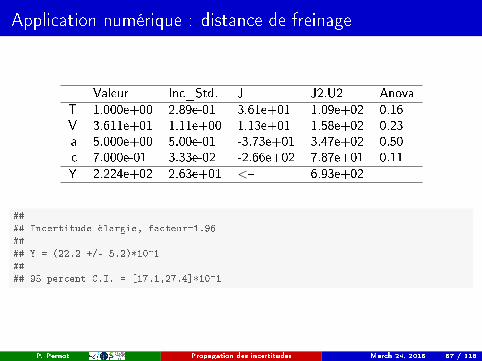
Application numérique : distance de freinage
Valeur Inc_Std. J J2.U2 AnovaT 1.000e+00 2.89e-01 3.61e+01 1.09e+02 0.16V 3.611e+01 1.11e+00 1.13e+01 1.58e+02 0.23a 5.000e+00 5.00e-01 -3.73e+01 3.47e+02 0.50c 7.000e-01 3.33e-02 -2.66e+02 7.87e+01 0.11Y 2.224e+02 2.63e+01 <� 6.93e+02
##
## Incertitude élargie, facteur=1.96
##
## Y = (22.2 +/- 5.2)*10^1
##
## 95 percent C.I. = [17.1,27.4]*10^1
P. Pernot Propagation des incertitudes March 24, 2015 57 / 118
Sommaire
1 Mesures et incertitudes
2 Représentation probabiliste des incertitudes
3 Bases théoriques de la propagation des incertitudes
4 Combinaison des variances
5 Propagation des distributions
6 Analyse Globale de Sensibilité
7 Présentation des résultats
8 Compléments
P. Pernot Propagation des incertitudes March 24, 2015 58 / 118
La méthode GUM de propagation des distributionsDocuments de référence
Évaluation des données de mesure � Supplément 1 du �Guide pourl'expression de l'incertitude de mesure� � Propagation de distributions parune méthode de Monte Carlo. JCGM 101:2008.http://www.bipm.org/fr/publications/guides/gum.html
M. Désenfant, N. Fischer, B. Blanquart, N. Bédiat (2007). Évaluation del'incertitude en utilisant les simulations de Monte Carlo. Actes du 13èmeCongrès de Métrologie, Lille.http://www.lne.fr/publications/13e-congres-metrologie/actes/
117-desenfant-incertitude-simulations-monte-carlo.pdf
P. Pernot Propagation des incertitudes March 24, 2015 58 / 118
Les limites du GUM - Linéarité
Hypothèse de linéarité
La formule de combinaison des variances du GUM est basée sur uneapproximation linéaire du modèle de la mesure au voisinage de la valeur moyennedes variables incertaines
E [f (X )] ' f [E (X )]
qui est valide tant que les écarts à la linéarité sont faibles devant les incertitudes.
Dans le cas de modèles linéaires, il n'y a aucune restriction de validité pour lecalcul des valeurs moyennes E (Y ) et incertitudes standard u(y).
P. Pernot Propagation des incertitudes March 24, 2015 59 / 118
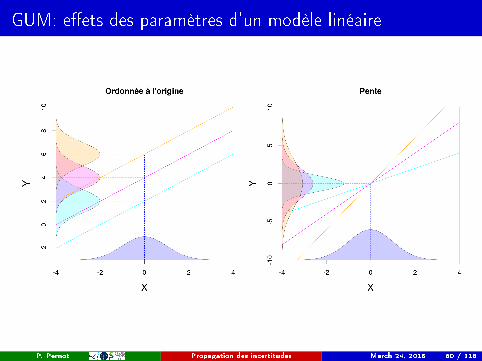
GUM: e�ets des paramètres d'un modèle linéaire
P. Pernot Propagation des incertitudes March 24, 2015 60 / 118
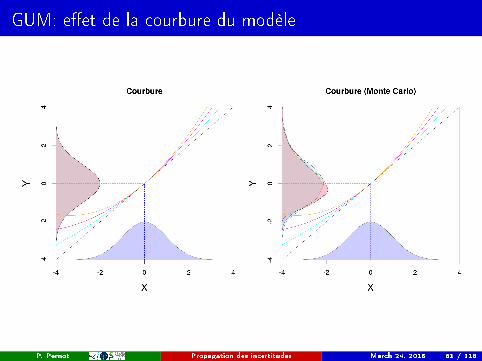
GUM: e�et de la courbure du modèle
P. Pernot Propagation des incertitudes March 24, 2015 61 / 118
Les limites du GUM - Linéarité
Pour les modèles non-linéaires, le premier ordre du développement de Taylor est su�santsi f est raisonnablement linéaire dans une région à 1 ou 2σ autour de x . Sinon peutalors avoir recours à des ordres supérieurs:
le GUM (5.1.2-Note) spéci�e que pour des entrées normales et indépendantes, leterme le plus important à rajouter est
kXi=1
kXj=1
"1
2
„∂2Y
∂Xi∂Xj
«2
+∂Y
∂Xi
∂3Y
∂Xi∂X 2
j
#u2(xi )u
2(xj )
Plusieurs articles développent des formules pour les ordres supérieurs, mais secantonnent au cas de variables indépendantes, p. ex. C.M. Wang and H.K. Iyer(2005) Metrologia 42:406; M.A.F. Martins et al. (2011) Measurement 44:1526.
En tous cas, plusieurs points doivent être véri�és:
F doit être continûment dérivable jusqu'à un ordre approprié, en toutes les variables auvoisinage de E(X);
les Xi impliqués dans des termes d'ordre supérieur du développement de Taylor de f (X)sont indépendantes et les pfds attribuées à ces variables sont normales/gaussiennes;
les termes ignorés de la série de Taylor de f (X) sont négligeables.
P. Pernot Propagation des incertitudes March 24, 2015 62 / 118

Les limites du GUM - Intervalles élargis
L'estimation des intervalles élargis préconisée par le GUM (multiplication del'incertitude-type par un facteur dépendant d'un nombre de degrés de liberté)présente également des limites:
la connaissance du nombre de degrés de liberté pour chacune des sourcesd'incertitude ;
le facteur d'élargissement implique un intervalle symétrique autour de lavaleur estimée, hypothèse qui peut devenir invalide si les densités deprobabilité attachées aux variables d'entrée in�uentes ne sont pas symétriques(p.ex. à cause de contraintes de positivité)...
P. Pernot Propagation des incertitudes March 24, 2015 63 / 118
Les réponses apportées par la propagation des distributions
La méthode de propagation des distributions permet de s'a�ranchir depratiquement toutes les restrictions liées à la formule de combinaison desvariances:
pas de restrictions sur la linéarité du modèle;
pas de restriction sur la forme des densités de probabilité;
calcul direct des intervalles élargis, même assymétriques...
Même si l'approche GUM reste valide dans une grande majorité de cas pratiques,la méthode de propagation des distributions peut aussi être un outil de validationpour la mise en place d'une démarche GUM pour un nouveau dispositif de mesure.
P. Pernot Propagation des incertitudes March 24, 2015 64 / 118

Le cas des modèles complexes
Ces modèles font en général appel à un ensemble de paramètres qui proviennentde mesures expérimentales (p.ex. simulations mécaniques par éléments �nis,problèmes de chimie-transport...)
Il est primordial d'évaluer l'impact des incertitudes de ces paramètres sur laprécision des prédictions des modèles. Les situations où on a plusieurs centaines,voire milliers de paramètres à gérer ne sont pas rares. La démarche GUM présentaalors deux problèmes:
1 il est pratiquement impossible de déterminer à l'avance les paramètresin�uents; et
2 la formule de propagation des variances devient vite inadaptée si on n'a pasune expression analytique des coe�cients de sensibilité ou si les paramètresincertains sont susceptibles de mettre en évidence les non-linéarités dumodèle.
Dans ce type de situation la méthode de propagation des distributions est un outilprécieux qui doit être combiné avec une étape d'analyse de sensibilité permettantd'identi�er les paramètres in�uents et éventuellement de simpli�er le modèle.
P. Pernot Propagation des incertitudes March 24, 2015 65 / 118

Principe - Rappel
1 Formulation
1 identi�cation des variables d'entrée incertaines X = {X1, ...,Xk}2 dé�nition du modèle Y = f (X)3 dé�nition de la densité de probabilité jointe des variables d'entrée gX (ξξξ)
2 Propagation des distributions (Équation de Markov)
gY (η) =
ˆdξξξ δ (η − f (ξξξ)) gX (ξξξ)
3 Résumés statistiques de gY (η)
P. Pernot Propagation des incertitudes March 24, 2015 66 / 118

L'approche Monte Carlo
on obtient directement les résumés statistiques sur Y à l'aide d'intégrales(multidimensionnelles) impliquant f (X) et gX
le calcul de telles intégrales peut rarement être mené de manière analytique.On a donc recours à des méthodes numériques:
les méthodes d'intégration basées sur une discrétisation des variables d'entrée(p.ex. méthode des trapèzes) sont ingérables dès qu'il y a plus de quelquesvariables: le nombre d'évaluations du modèle augmente comme une puissancedu nombre de variables
l'intégration stochastique par la méthode de Monte Carlo ne présente pas cedésavantage.
P. Pernot Propagation des incertitudes March 24, 2015 67 / 118
Approximation d'intégrales par Monte CarloPrincipe
la pdf gX (ξξξ) est remplacée par un échantillon représentatif{ξξξ(i); i = 1,N
}le calcul d'intégrale est remplacé par une moyenne arithmétique
ˆdξξξ f (ξξξ) gX (ξξξ) ' 1
N
N∑i=1
f(ξξξ(i))
point positif: l'incertitude statistique de l'intégrale calculée ne dépend pas dunombre de dimensions de l'espace des paramètre incertains.
Si les{ξξξ(i); i = 1,N
}résultent de tirages indépendants, l'incertitude sur la
valeur de l'intégrale évolue en N−1/2 (Théorème de la limite centrée).
P. Pernot Propagation des incertitudes March 24, 2015 68 / 118
Application à la propagation des distributions
1 Dé�nir les densités de probabilité pour toutes les variables incertaines(type A et type B) gX (ξξξ)
2 Générer un échantillon représentatif de chacune des variables ou groupes devariables corrélées (à l'aide de générateurs de nombres aléatoires)
3 Calculer le résultat du modèle pour chaque point de l'échantillonη(i) = f (ξξξ(i)); i = 1,N
4 Produire les résumés statistiques adéquats: E (Y ), u(y) et intervalle élargi à100p%
P. Pernot Propagation des incertitudes March 24, 2015 69 / 118
Propagation des distributions par Monte CarloÉtape 1: génération d'un échantillon représentatif des entrées
gX (ξξξ)↓︷ ︸︸ ︷ f
ξ(1)1 ξ
(1)2 ... ξ
(1)k → η(1)
ξ(2)1 ξ
(2)2 ... ξ
(2)k → η(2)
......
......
ξ(m)1 ξ
(m)2 ... ξ
(m)k → η(m)
↓gY (η)
P. Pernot Propagation des incertitudes March 24, 2015 70 / 118
Propagation des distributions par Monte CarloÉtape 2: application du modèle à chacun des points de l'échantillon
gX (ξξξ)↓︷ ︸︸ ︷ f
ξ(1)1 ξ
(1)2 ... ξ
(1)k → η(1)
ξ(2)1 ξ
(2)2 ... ξ
(2)k → η(2)
......
......
ξ(m)1 ξ
(m)2 ... ξ
(m)k → η(m)
↓gY (η)
P. Pernot Propagation des incertitudes March 24, 2015 71 / 118
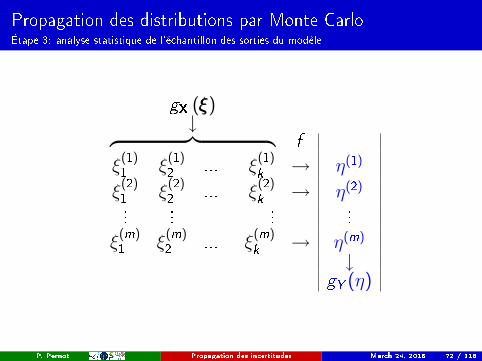
Propagation des distributions par Monte CarloÉtape 3: analyse statistique de l'échantillon des sorties du modèle
gX (ξξξ)↓︷ ︸︸ ︷ f
ξ(1)1 ξ
(1)2 ... ξ
(1)k → η(1)
ξ(2)1 ξ
(2)2 ... ξ
(2)k → η(2)
......
......
ξ(m)1 ξ
(m)2 ... ξ
(m)k → η(m)
↓gY (η)
P. Pernot Propagation des incertitudes March 24, 2015 72 / 118
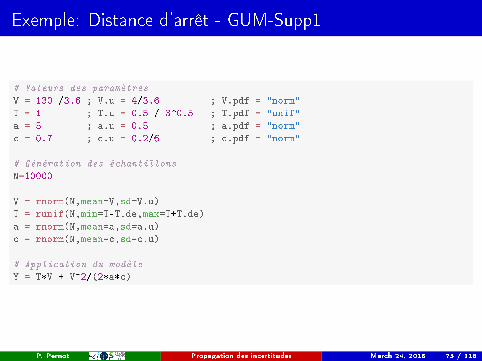
Exemple: Distance d'arrêt - GUM-Supp1
# Valeurs des paramètres
V = 130 /3.6 ; V.u = 4/3.6 ; V.pdf = "norm"
T = 1 ; T.u = 0.5 / 3^0.5 ; T.pdf = "unif"
a = 5 ; a.u = 0.5 ; a.pdf = "norm"
c = 0.7 ; c.u = 0.2/6 ; c.pdf = "norm"
# Génération des échantillons
N=10000
V = rnorm(N,mean=V,sd=V.u)
T = runif(N,min=T-T.de,max=T+T.de)
a = rnorm(N,mean=a,sd=a.u)
c = rnorm(N,mean=c,sd=c.u)
# Application du modèle
Y = T*V + V^2/(2*a*c)
P. Pernot Propagation des incertitudes March 24, 2015 73 / 118
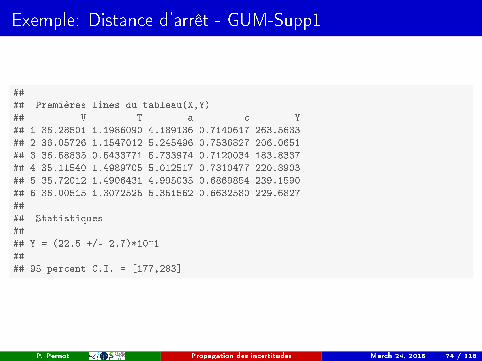
Exemple: Distance d'arrêt - GUM-Supp1
##
## Premières lines du tableau(X,Y)
## V T a c Y
## 1 36.28501 1.1986090 4.189136 0.7140617 263.5633
## 2 36.05726 1.1547012 5.245496 0.7536827 206.0651
## 3 36.58835 0.5433771 5.733974 0.7120034 183.8337
## 4 35.11540 1.4989705 5.012517 0.7310477 220.8903
## 5 35.72012 1.4906431 4.995035 0.6869854 239.1590
## 6 36.00515 1.3072525 5.351562 0.6632580 229.6827
##
## Statistiques
##
## Y = (22.5 +/- 2.7)*10^1
##
## 95 percent C.I. = [177,283]
P. Pernot Propagation des incertitudes March 24, 2015 74 / 118
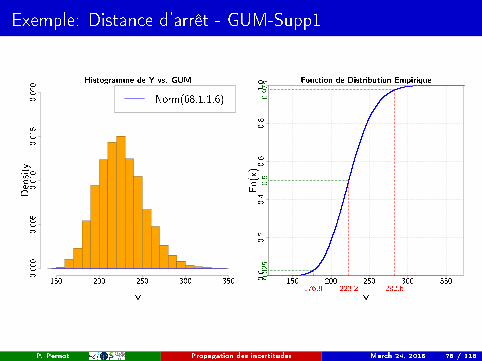
Exemple: Distance d'arrêt - GUM-Supp1
Histogramme de Y vs. GUM
Den
sity
150 200 250 300 350
0.000
0.005
0.010
0.015
0.020
Y
Norm(68.1,1.6)
150 200 250 300 3500.0
0.2
0.4
0.6
0.8
1.0 Fonction de Distribution Empirique
Fn(x)
Y
0.025
176.8
0.5
223.2
0.975
282.6
P. Pernot Propagation des incertitudes March 24, 2015 75 / 118
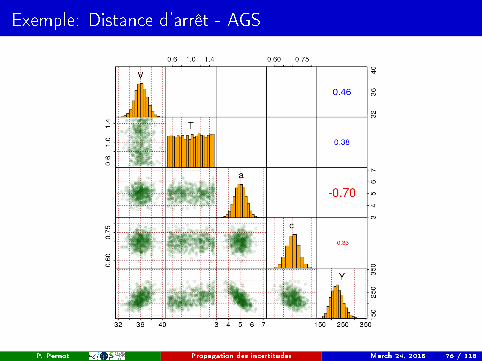
Exemple: Distance d'arrêt - AGS
P. Pernot Propagation des incertitudes March 24, 2015 76 / 118
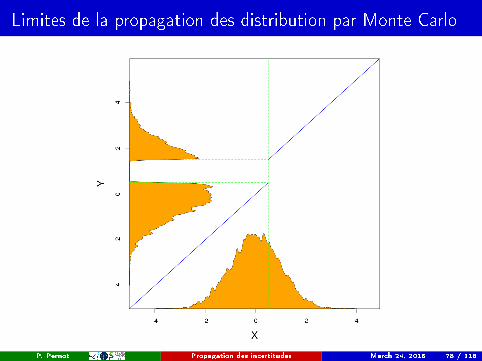
Limites de la propagation des distribution par Monte Carlo
La seule condition pour pouvoir e�ectuer le calcul de propagation est que lafonction F doit être continue au voisinage de E (X).
Des restrictions plus sévères s'appliquent pour assurer la validité des résumésstatistiques:
pour pouvoir évaluer de manière univoque des intervalles élargis, il estnécessaire que la fonction de distribution GY soit continue et monotonementcroissantepour la détermination de l'intervalle élargi à 100p% le plus court, descontraintes s'appliquent sur la pdf gY : continuité, unimodalitéE (Y ) et V (Y ) doivent existerun nombre de tirages M su�sant doit être réalisé.
Le principe de la méthode de Monte Carlo est donc très simple et elle a un champd'application très large. Il nous laisse cependant avec deux problèmes techniques:
comment générer un échantillon représentatif d'une densité de probabilité ?combien de tirages sont nécessaires pour atteindre une précision spéci�ée surles résumés statistiques ?P. Pernot Propagation des incertitudes March 24, 2015 77 / 118
Limites de la propagation des distribution par Monte Carlo
P. Pernot Propagation des incertitudes March 24, 2015 78 / 118

Générer des nombres aléatoires de distribution prescrite
Dispositifs capables de produire une séquence de nombres dont on ne peut pasfacilement tirer des propriétés déterministes:
Générateurs reposant sur des phénomènes imprévisibles: les dés, laroulette, le tirage au sort (loto et autres), les di�érentes méthodes de mélangedes cartes, le pile ou face... ( souvent biaisés ou insu�samment sûrs)
Générateurs reposant sur des phénomènes physiques: radioactivité ;bruits thermiques ; bruits électromagnétiques ; mécanique quantique (a prioriles meilleurs générateurs, mais ils ne sont pas faciles à mettre en place). Desséquences nombres aléatoires physiques sont téléchargeables à partird'internet : www.random.org, www.randomnumbers.info
Générateurs reposant sur des algorithmes
un algorithme est déterministe, à l'opposé de ce que l'on recherchecertaines opérations sont su�samment imprévisibles pour donner des résultatsqui semblent aléatoiresles nombres ainsi obtenus sont appelés pseudo-aléatoiresplus facile et plus e�cace à produire que par d'autres méthodes
P. Pernot Propagation des incertitudes March 24, 2015 79 / 118
Générateurs de séquences de nombres aléatoires
tous les générateurs ne sont pas égaux entre eux
s'assurer avant tout que les générateurs aléatoires utilisés ont des propriétéssatisfaisantes pour:
la période de récurrence du générateurla corrélation séquentielle
des algorithmes sophistiqués combinant plusieurs générateurs (MersenneTwister, Wichmann-Hill...) sont aujourd'hui la norme. Correctementprogrammés et paramétrés, ils fournissent des séquences avec des périodescouvrant la majorité des besoins en propagation des distribution.
P. Pernot Propagation des incertitudes March 24, 2015 80 / 118

E�cacité statistique
L'utilisation d'une chaîne de Markov, ou d'une dynamique fait que les pointssuccessifs de l'échantillon ne sont plus indépendants. Il faut alors estimerl'e�cacité statistique de l'échantillon:
1 estimer µ = x and σ2 = 1
N−1∑
(xi − x)2
2 calculer la fonction d'autocorrélation
A(l) =1
σ2 (N − l − 1)
N−l∑i=1
(xi − x)(xi+l − x); l ≥ 0
et estimer la longueur de corrélation τ (intégrale de A(l) ou ajustementmonoexponentiel A(l) = exp(−l/τ))
3 on obtient alors ρ = (1 + 2τ)−1, l'e�cacité statistique de la chaîne(0 < ρ < 1) et l'incertitude-type sur l'estimation de la valeur moyenne est
µ = x ± σ√Nρ
.
Certains packages de R (coda) fournissent directement la taille e�ective Nρ del'échantillon et/ou l'incertitude-type corrigée.
P. Pernot Propagation des incertitudes March 24, 2015 81 / 118
Corrélation de variables non-gaussiennes
Comment générer des échantillons de variables corrélées non-normales ?
variables normales:X = mvtnorm::rmvnorm(M,mean=x.mu, sigma=VCov)
variables de distribution Student's:X = mvtnorm::rmvt(M,df=df,sigma=VCov,delta=x.mu)
autres ou variables hétérogènes �> méthode des copules:
générer un échantillon normal multivariée de corrélation prescritetransformer en échantillons de probabilités (par la densité cumulée normale)pour chaque variable, calculer les quantiles à partir des probabilités (inversionde la densité cumulée de distribution prescrite)
Biblio: A. Possolo (2010) Copulas for uncertainty analysis. Metrologia 47:262.doi:10.1088/0026-1394/47/3/017
P. Pernot Propagation des incertitudes March 24, 2015 82 / 118
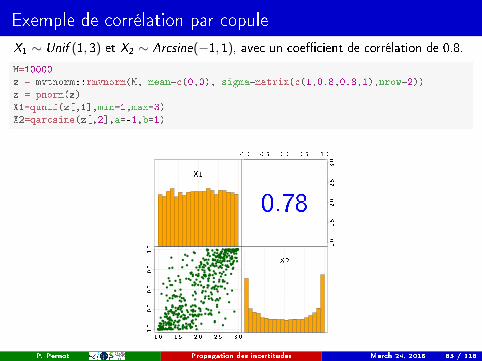
Exemple de corrélation par copuleX1 ∼ Unif (1, 3) et X2 ∼ Arcsine(−1, 1), avec un coe�cient de corrélation de 0.8.
M=10000
z = mvtnorm::rmvnorm(M, mean=c(0,0), sigma=matrix(c(1,0.8,0.8,1),nrow=2))
z = pnorm(z)
X1=qunif(z[,1],min=1,max=3)
X2=qarcsine(z[,2],a=-1,b=1)
X1
-1.0 -0.5 0.0 0.5 1.0
1.0
1.5
2.0
2.5
3.0
0.78
1.0 1.5 2.0 2.5 3.0
-1.0
-0.5
0.0
0.5
1.0
X2
P. Pernot Propagation des incertitudes March 24, 2015 83 / 118

Convergence des estimateurs
On n'est pas capable de prévoir le nombre de tirages nécessaires pour atteindreune précision prescrite sur tous les estimateurs d'une séquence aléatoire. Onutilise une approche adaptative: augmenter le nombre de tirages jusqu'à lastabilisation statistique des estimateurs.
0 2000 4000 6000 8000 10000-0.10
-0.05
0.00
0.05
0.10
x
Deviationdes
estimateurs
cumulatifs
Moyenne
Limites exactes
Q05
P. Pernot Propagation des incertitudes March 24, 2015 84 / 118
Méthode de Monte Carlo adaptativeVersion originale du GUM Supp1
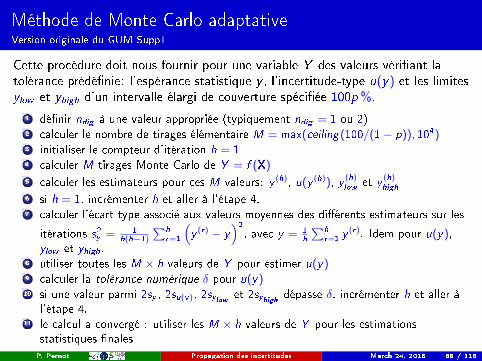
Cette procédure doit nous fournir pour une variable Y des valeurs véri�ant latolérance prédé�nie: l'espérance statistique y , l'incertitude-type u(y) et les limitesylow et yhigh d'un intervalle élargi de couverture spéci�ée 100p %.
1 dé�nir ndig à une valeur appropriée (typiquement ndig = 1 ou 2)2 calculer le nombre de tirages élémentaire M = max(ceiling(100/(1− p)), 104)3 initialiser le compteur d'itération h = 14 calculer M tirages Monte Carlo de Y = f (X)5 calculer les estimateurs pour ces M valeurs: y (h), u(y (h)), y
(h)low et y
(h)high
6 si h = 1, incrémenter h et aller à l'étape 4.7 calculer l'écart type associé aux valeurs moyennes des di�érents estimateurs sur les
itérations s2y = 1
h(h−1)
Phr=1
“y (r) − y
”2
, avec y = 1
h
Phr=1
y (r). Idem pour u(y),ylow et yhigh.
8 utiliser toutes les M × h valeurs de Y pour estimer u(y)9 calculer la tolérance numérique δ pour u(y)10 si une valeur parmi 2sy , 2su(y), 2sylow et 2syhigh dépasse δ, incrémenter h et aller à
l'étape 4.11 le calcul a convergé : utiliser les M × h valeurs de Y pour les estimations
statistiques �nales
P. Pernot Propagation des incertitudes March 24, 2015 85 / 118

La tolérance numérique
Soit ndig le nombre de chi�res considérés comme signi�catifs pour une valeurnumérique x . La tolérance numérique δ associée à x est dé�nie par:
1 mettre x sous la forme c × 10l , où c est un entier à ndig chi�res et l un entier;2 on a alors δ = 0.5× 10l
Exemple
numtol(12345,ndig=1) = 5000
numtol(12345,ndig=2) = 500
P. Pernot Propagation des incertitudes March 24, 2015 86 / 118
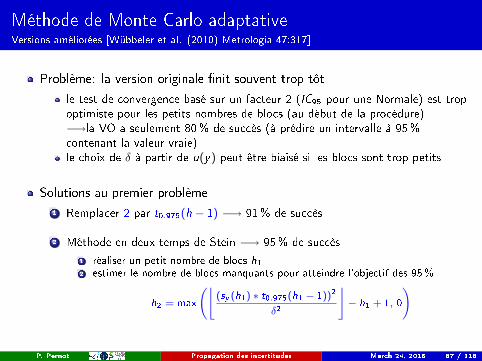
Méthode de Monte Carlo adaptativeVersions améliorées [Wübbeler et al. (2010) Metrologia 47:317]
Problème: la version originale �nit souvent trop tôt
le test de convergence basé sur un facteur 2 (IC95 pour une Normale) est tropoptimiste pour les petits nombres de blocs (au début de la procédure)−→la VO a seulement 80% de succès (à prédire un intervalle à 95%contenant la valeur vraie)le choix de δ à partir de u(y) peut être biaisé si les blocs sont trop petits
Solutions au premier problème1 Remplacer 2 par t0.975(h − 1) −→ 91% de succès
2 Méthode en deux temps de Stein −→ 95% de succès
1 réaliser un petit nombre de blocs h12 estimer le nombre de blocs manquants pour atteindre l'objectif des 95%
h2 = max
$(sy (h1) ∗ t0.975(h1 − 1))2
δ2
%− h1 + 1, 0
!
P. Pernot Propagation des incertitudes March 24, 2015 87 / 118

Le problème des temps de calcul
Le nombre de tirages nécessaire à la convergence des estimateurs peut devenirprohibitif si on utilise un modèle gourmand en temps de calcul.
Ex: distribution sur 1000 essais du nombre de runspour converger IC 95 d'une distribution normale.
P. Pernot Propagation des incertitudes March 24, 2015 88 / 118
Sommaire
1 Mesures et incertitudes
2 Représentation probabiliste des incertitudes
3 Bases théoriques de la propagation des incertitudes
4 Combinaison des variances
5 Propagation des distributions
6 Analyse Globale de Sensibilité
7 Présentation des résultats
8 Compléments
P. Pernot Propagation des incertitudes March 24, 2015 89 / 118
Analyse Globale de Sensibilité
Objectifs
Repérer a posteriori les variables in�uentes en analysant les échantillons de X etY .
Cette partie n'est pas explicitement abordée par le GUM-Supp1, mais on peutconsidérer que c'est un complément pratiquement indispensable à l'approche parMonte Carlo.
Documents de référence
J.C. Helton, J.D. Johnson, C.J. Salaberry, and C.B. Storlie (2006) Survey ofsampling based methods for uncertainty and sensitivity analysis. ReliabilityEngineering and System Safety 91:1175�1209.
A. Saltelli, S. Tarantola, F. Campolongo and M. Ratto (2004). SensitivityAnalysis in Practice: A Guide to Assessing Scienti�c Models. John Wiley andSons.
P. Pernot Propagation des incertitudes March 24, 2015 89 / 118

Corrélation entrées/sortie
Les échantillons générés pour la propagation des distributions peuvent êtredirectement utilisés pour calculer des indices de sensibilité.
une méthode simple à mettre en oeuvre est le calcul des coe�cients decorrélation entre les échantillons de Y et de X.
dans certaines limites, en particulier la variation monotone de Y en fonctionde X, la valeur absolue du coe�cient de corrélation cor(Y ,Xi ) traduitl'importance de l'in�uence de Xi sur Y . Dans l'approximation linéaire, onpeut écrire
cor(Y ,Xi ) =k∑j=1
(∂Y
∂Xj
)x
u(xj)
u(y)cor(Xi ,Xj)
et dans le cas de variables indépendantes, on a
cor2(Y ,Xi ) =
(∂Y∂Xi
)2xu2(xi )
u2(y)≡ ANOVAi
P. Pernot Propagation des incertitudes March 24, 2015 90 / 118

Corrélation entrées/sortie
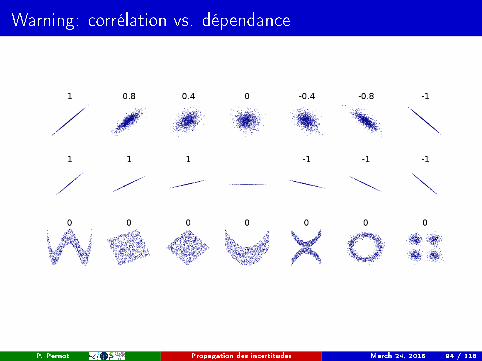
si Y ne varie pas monotonement en fonction d'un paramètre, même une fortedépendance peut se traduire par un coe�cient de corrélation nul. Ces cas nesont pas forcément aisés à repérer lorsqu'on a des modèles avec des centainesde paramètres...
pour ne pas être trop dépendant d'une hypothèse de linéarité, on utilise engénéral la corrélation de rang (Spearman), plutôt que la corrélation linéaire(Pearson).
P. Pernot Propagation des incertitudes March 24, 2015 91 / 118
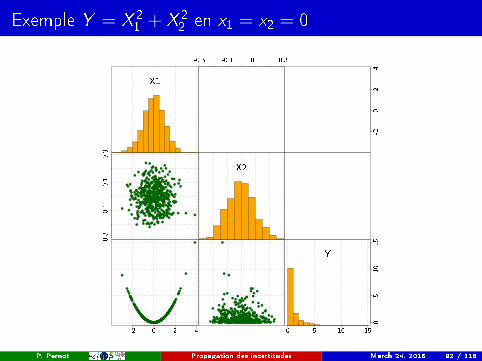
Exemple Y = X 21 + X 2
2 en x1 = x2 = 0
X1
-0.3 -0.1 0.1 0.3
-0.0043
-20
24
0.013
-0.3
-0.1
0.1
0.3
X2
-0.05
-2 0 2 4 0 5 10 15
05
10
15
Y
P. Pernot Propagation des incertitudes March 24, 2015 92 / 118

Exemple Y = X 21 + X 2
2 en x1 = 0; x2 = 1
X1
0.7 0.9 1.1 1.3
0.004
-2-1
01
23
4
0.890.7
0.9
1.1
1.3
X2
0.17
-2 -1 0 1 2 3 4 0 5 10 15
05
10
15Y
P. Pernot Propagation des incertitudes March 24, 2015 93 / 118
Warning: corrélation vs. dépendance
P. Pernot Propagation des incertitudes March 24, 2015 94 / 118

Au delà des corrélations
comme le montrent ces exemples, il ne faut jamais se contenter desvaleurs, et il est toujours utile de tracer des diagrammes de paires entre lesvariables pour repérer d'éventuelles anomalies.
en cas de doute à propos de la méthode des corrélations, il existe desméthodes plus sophistiquées:
nécessitent souvent la génération d'échantillons spéci�ques, où les variablessont perturbées de façon optimale pour repérer les in�uences (Sobol...)
pour en savoir plus, consulter les ouvrages cités plus haut, ainsi que le packagesensitivity de R, qui fournit la plupart de ces méthodes.
la méthode des �gradients de la variance� utilise un échantillon Monte-Carlostandard [Campanelli et al. (2013) Meas. Sci. Tech. 24:025002]...
P. Pernot Propagation des incertitudes March 24, 2015 95 / 118
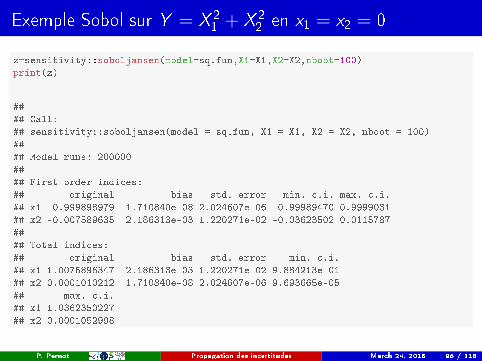
Exemple Sobol sur Y = X 21 + X 2
2 en x1 = x2 = 0
z=sensitivity::soboljansen(model=sq.fun,X1=X1,X2=X2,nboot=100)
print(z)
##
## Call:
## sensitivity::soboljansen(model = sq.fun, X1 = X1, X2 = X2, nboot = 100)
##
## Model runs: 200000
##
## First order indices:
## original bias std. error min. c.i. max. c.i.
## x1 0.999898979 -1.710840e-08 2.024607e-06 0.99989470 0.9999031
## x2 -0.007589635 2.186313e-03 1.220271e-02 -0.03623502 0.0115787
##
## Total indices:
## original bias std. error min. c.i.
## x1 1.0075896347 -2.186313e-03 1.220271e-02 9.884213e-01
## x2 0.0001010212 1.710840e-08 2.024607e-06 9.693665e-05
## max. c.i.
## x1 1.0362350227
## x2 0.0001052998
P. Pernot Propagation des incertitudes March 24, 2015 96 / 118
Gradients de la Variance
On calcule pour chaque variable l'indice suivant:
Gi =E(
(Y − y) ∂Y∂Xi
(Xi − x i ))
u2(y)
Interprétation: une variation de p% de la variance de Xi résulte en unevariation de Gip% de la variance de Y
Rq:
Gi peut être négatifrecyclage de l'échantillon MC existantcalcul des gradients en chaque pointvalide pour des variables indépendantes
Ref: Campanelli et al. (2013) Meas. Sci. Tech. 24:025002
P. Pernot Propagation des incertitudes March 24, 2015 97 / 118
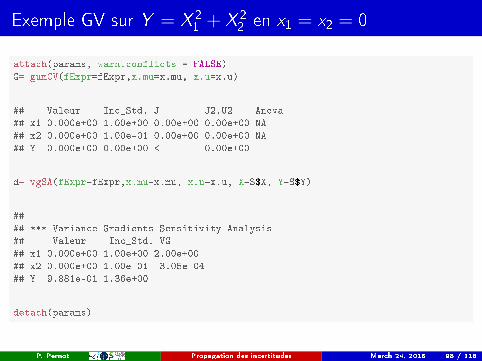
Exemple GV sur Y = X 21 + X 2
2 en x1 = x2 = 0
attach(params, warn.conflicts = FALSE)
G= gumCV(fExpr=fExpr,x.mu=x.mu, x.u=x.u)
## Valeur Inc_Std. J J2.U2 Anova
## x1 0.000e+00 1.00e+00 0.00e+00 0.00e+00 NA
## x2 0.000e+00 1.00e-01 0.00e+00 0.00e+00 NA
## Y 0.000e+00 0.00e+00 <-- 0.00e+00
d= vgSA(fExpr=fExpr,x.mu=x.mu, x.u=x.u, X=S$X, Y=S$Y)
##
## *** Variance Gradients Sensitivity Analysis
## Valeur Inc_Std. VG
## x1 0.000e+00 1.00e+00 2.00e+00
## x2 0.000e+00 1.00e-01 -3.05e-04
## Y 9.881e-01 1.36e+00
detach(params)
P. Pernot Propagation des incertitudes March 24, 2015 98 / 118
Sommaire
1 Mesures et incertitudes
2 Représentation probabiliste des incertitudes
3 Bases théoriques de la propagation des incertitudes
4 Combinaison des variances
5 Propagation des distributions
6 Analyse Globale de Sensibilité
7 Présentation des résultats
8 Compléments
P. Pernot Propagation des incertitudes March 24, 2015 99 / 118
Combien de chi�res signi�catifs?
Cela dépend de l'incertitude sur le résultat, mais aussi de la destination de cerésultat:
résultats intermédiaires d'un calcul : en garder le maximum pour éviterl'accumulation d'erreurs d'arrondi;résultat �nal: conserver 2 chi�res signi�catifs pour l'incertitude et tronquer
le résultat au même niveau. p. ex., si y = 1.23456789U et uY = 0.0045U,on reportera Y /U = 1.2345± 0.0045.
d'une manière générale, il vaut mieux reporter trop de chi�res que trop peu.Dans ce dernier cas, on causerait une dégradation préjudiciable del'information. Cependant, ne pas exagérer, et avoir toujours en tête un ordrede grandeur des incertitudes associées à la mesure ou à la méthode de calculutilisée.
NB: pour la matrice de variance/covariance, choisir un nombre de chi�resigni�catifs assurant que la matrice tronquée est bien dé�nie positive.
P. Pernot Propagation des incertitudes March 24, 2015 99 / 118
Comment reporter un résultat
notation standardY /U = y ± uY
où Y est le mesurande, U l'unité, y le résultat de mesure et uY l'incertitudetype associée. Il faut alors préciser qu'il s'agit d'une incertitude-type et nonétendue...p. ex., si on a mesuré y = 1.2345 kg avec uY = 0.0011 kg, on notera
Y /kg = 1.2345± 0.0011
on trouvera aussi souvent la notation condensée (recommandée)
Y /kg = 1.2345(11)
où l'ordre de grandeur des 2 chi�res entre parenthèses correspond à celui des2 derniers chi�res signi�catifs du résultat.
NB: dans le cas de plusieurs résultats avec des incertitudes corrélées, il fautégalement fournir la matrice de variance/covariance, ou la matrice decorrélation.P. Pernot Propagation des incertitudes March 24, 2015 100 / 118
Incertitude élargie
Déterminer k tel que si Y est estimé par y avec une incertitude (élargie)U(y) = ku(y), on peut a�rmer que
y − U(y) ≤ Y ≤ y + U(y)
avec une probabilité p proche de 1. [y −U(y), y + U(y)] est alors un intervalle decouverture à p %.
On écrit alors: Y /U = y ± U(y); k = x .
Il faut connaître la pdf, ce qui peut poser des problèmes avec la méthode decombinaison des variances
dans le cas idéal (modèle raisonnablement linéaire, plusieurs sourcesd'incertitude avec des in�uences comparables...) la pdf de Y est Normale, eton peut utiliser les propriétés correspondantes ( k = 2 pour p ' 0.95 ouk = 3 pour p ' 0.99...)
P. Pernot Propagation des incertitudes March 24, 2015 101 / 118
Incertitude élargie
sinon, il faut identi�er les sources principales d'incertitude (hyp: modèleapprox. linéaire)
type A avec peu (moins de 10) de répétitions: utiliser les coe�cients deStudent (k = tp)
n 3 4 5 10 30 50 ∞t95% 4.30 3.18 2.78 2.26 2.04 2.01 1.96t99% 9.93 5.84 4.60 3.25 2.75 2.68 2.58
Ex: mesure de la surface de la table
type B non Normal: se baser sur les propriétés de la pdf
sinon, Monte Carlo....
P. Pernot Propagation des incertitudes March 24, 2015 102 / 118
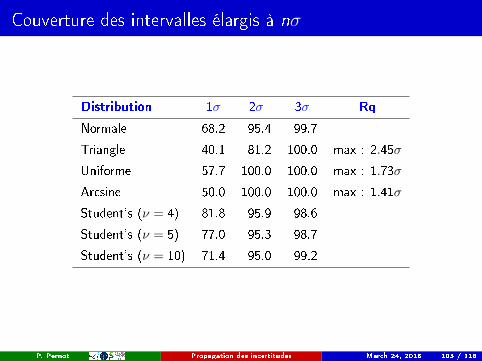
Couverture des intervalles élargis à nσ
Distribution 1σ 2σ 3σ Rq
Normale 68.2 95.4 99.7
Triangle 40.1 81.2 100.0 max : 2.45σ
Uniforme 57.7 100.0 100.0 max : 1.73σ
Arcsine 50.0 100.0 100.0 max : 1.41σ
Student's (ν = 4) 81.8 95.9 98.6
Student's (ν = 5) 77.0 95.3 98.7
Student's (ν = 10) 71.4 95.0 99.2
P. Pernot Propagation des incertitudes March 24, 2015 103 / 118
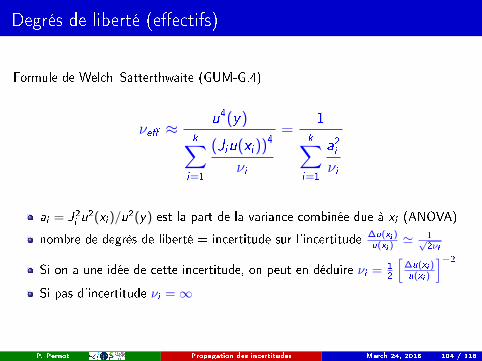
Degrés de liberté (e�ectifs)
Formule de Welch�Satterthwaite (GUM-G.4)
νe� ≈u4(y)
k∑i=1
(Jiu(xi))4
νi
=1
k∑i=1
a2iνi
ai = J2i u2(xi )/u2(y) est la part de la variance combinée due à xi (ANOVA)
nombre de degrès de liberté = incertitude sur l'incertitude ∆u(xi )u(xi )
' 1√2νi
Si on a une idée de cette incertitude, on peut en déduire νi = 1
2
[∆u(xi )u(xi )
]−2Si pas d'incertitude νi =∞
P. Pernot Propagation des incertitudes March 24, 2015 104 / 118

Comparaison des couvertures par lois Normale et Student
Statistique sur M = 10000 répétitions de la moyennede n = 5 nombres tirés d'une distribution Normale standard.
M=10000
n=5
X=matrix(rnorm(n*M,mean=0,sd=1),ncol=n,nrow=M)
Xm=apply(X,1,mean)
Xv=apply(X,1,var)
Histogram of Xm
Xm
Density
-2 -1 0 1 2
0.0
0.2
0.4
0.6
0.8
1.0
Histogram of Xv
Xv
Den
sity
0 1 2 3 4
0.0
0.2
0.4
0.6
0.8
P. Pernot Propagation des incertitudes March 24, 2015 105 / 118

Comparaison des couvertures par lois Normale et Student
Estimation de la fréquence de succès des calculsd'intervalles de couverture à 95 % (IC_95)
freqNor = apply(X,1,function(x) {
inter=mean(x)+sd(x)/n^0.5*qnorm(p=c(0.025,0.975))
prod(inter)<=0 } )
freqStu = apply(X,1,function(x) {
inter=mean(x)+sd(x)/n^0.5*qt(p=c(0.025,0.975),df=n-1)
prod(inter)<=0 } )
print(c(paste0('%Nor = ',100*sum(freqNor)/M),
paste0('%Stu = ',100*sum(freqStu)/M)))
## [1] "%Nor = 87.59" "%Stu = 94.71"
P. Pernot Propagation des incertitudes March 24, 2015 106 / 118
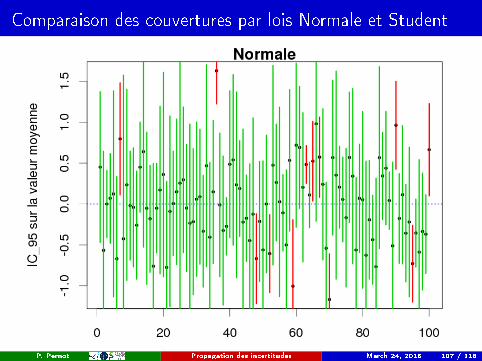
Comparaison des couvertures par lois Normale et Student
P. Pernot Propagation des incertitudes March 24, 2015 107 / 118
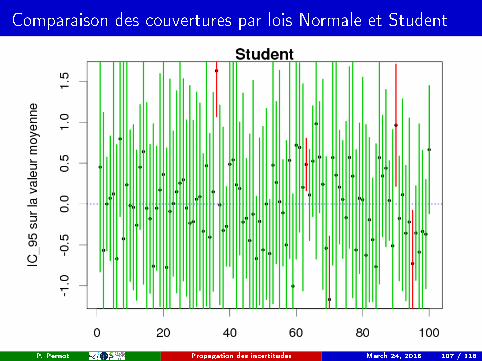
Comparaison des couvertures par lois Normale et Student
P. Pernot Propagation des incertitudes March 24, 2015 107 / 118
Sommaire
1 Mesures et incertitudes
2 Représentation probabiliste des incertitudes
3 Bases théoriques de la propagation des incertitudes
4 Combinaison des variances
5 Propagation des distributions
6 Analyse Globale de Sensibilité
7 Présentation des résultats
8 Compléments
P. Pernot Propagation des incertitudes March 24, 2015 108 / 118

Retour sur les covariances
On peut exprimer la covariance entre deux mesurandes Y1, Y2 dans le cadre GUM
(GUM-F.1.2.3; hypothèse des entrées indépendentes)
u(y1, y2) =k∑
i=1
(∂Y1
∂Xi
)x
(∂Y2
∂Xi
)x
u2(xi)
On voit alors que seules les souces d'incertitude communes aux deux mesurescontribuent (dérivée non-nulle)
Cf. exemple mesure de longueur et largeur d'une table avec le même mètre àruban.
P. Pernot Propagation des incertitudes March 24, 2015 108 / 118

Covariance des mesurandes multiples
Plus généralement, pour un modèle à p sorties et des entrées éventuellement
corrélées (GUM-Supp2)
ΣY = JTΣXJ
avec
J =
(∂Y1∂X1
)x
. . .(∂Yp
∂X1
)x(
∂Y1∂X2
)x
. . .(∂Yp
∂X2
)x
... . . ....(
∂Y1∂Xk
)x
. . .(∂Yp
∂Xk
)x
P. Pernot Propagation des incertitudes March 24, 2015 109 / 118
Application: calibration-prédiction
Propagation des incertitudes lors de la calibration d'une droite (régression)et de son utilisation en prédiction
on dispose de N triplets de valeurs {xi , yi , uyi } (on suppose uxi négligeableou nul)
modèle de mesure: yi = a + b ∗ xi + εi , avec εi ∼ N(µ = 0, σ = uyi )
�> régression linéaire par la méthode des �moindres carrés pondérés�
(a, b) = argmina,bχ2(a, b)
χ2(a, b) =N∑i=1
(yi − a− bxi )2
u2yi
P. Pernot Propagation des incertitudes March 24, 2015 110 / 118
Calibration des paramètres
Résolution :
1 calculer les moyennes pondérées x =P
w2i xiPw2i
et y =P
w2i yiPw2i, avec les poids
wi = 1/uyi2 recentrer les données: xi = xi − x et yi = yi − y
3 alors
b =
∑i w
2i xi yi∑
i w2i x
2i
=
∑i w
2i xiyi∑
i w2i x
2i
et
a = y − bx
cette dernière équation montre bien que a et b sont corrélés
P. Pernot Propagation des incertitudes March 24, 2015 111 / 118
Variance/covariance des paramètres
Le calcul des incertitudes-type sur les coe�cients de régression peut être mené
analytiquement en appliquant le GUM:
u2b =
∑i (w
2i xi)
2u2yi
(∑
i w2i x
2i )
2 =1∑
i w2i x
2i
u2a = var(y) + x2u2b =u2b∑w 2i
+x2∑i w
2i x
2i
cov(a, b) = cov(y , b)− x ∗ cov(b, b) = − x∑i w
2i x
2i
P. Pernot Propagation des incertitudes March 24, 2015 112 / 118
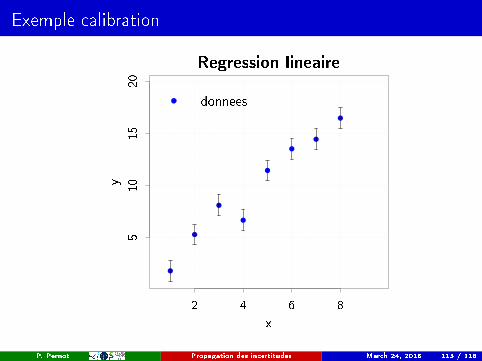
Exemple calibration
2 4 6 8
510
15
20
x
y
Regression lineaire
donnees
P. Pernot Propagation des incertitudes March 24, 2015 113 / 118
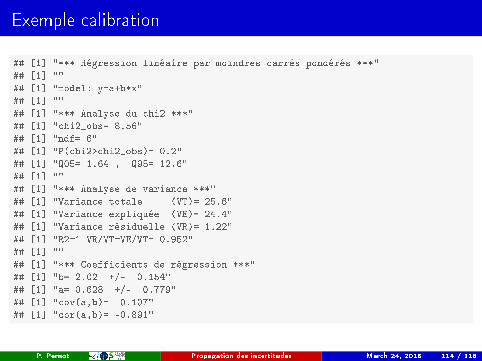
Exemple calibration
## [1] "*** Régression linéaire par moindres carrés pondérés ***"
## [1] ""
## [1] "model: y=a+b*x"
## [1] ""
## [1] "*** Analyse du chi2 ***"
## [1] "chi2_obs= 8.56"
## [1] "ndf= 6"
## [1] "P(chi2>chi2_obs)= 0.2"
## [1] "Q05= 1.64 , Q95= 12.6"
## [1] ""
## [1] "*** Analyse de variance ***"
## [1] "Variance totale (VT)= 25.6"
## [1] "Variance expliquée (VE)= 24.4"
## [1] "Variance résiduelle (VR)= 1.22"
## [1] "R2=1-VR/VT=VE/VT= 0.952"
## [1] ""
## [1] "*** Coefficients de régression ***"
## [1] "b= 2.02 +/- 0.154"
## [1] "a= 0.628 +/- 0.779"
## [1] "cov(a,b)= -0.107"
## [1] "cor(a,b)= -0.891"
P. Pernot Propagation des incertitudes March 24, 2015 114 / 118
Prédiction directe
Connaissant les paramètres de la droite de régression et lesincertitudes/covariance associées, on veut déterminer l'incertitude liée au calculd'une valeur de Y en un point x quelconque à l'aide du modèle linéaire.
Modèle statistique
Y = a + bX + ε
a et b représentent les paramètres incertains de la droite de régression;
X représente l'ordonnée pour laquelle on veut une prédiction de Y ;X est éventuellement incertaine x = x0 ± ux ; et
ε représente une erreur aléatoire sur la mesure d'une valeur de Y ;ε est de moyenne nulle et d'amplitude dépendant éventuellement de X ,σε(X ).
P. Pernot Propagation des incertitudes March 24, 2015 115 / 118

Prédiction directe
On applique (encore) la loi de combinaison des variances (GUM):
y = a + bx0 + ε
u2y = u2a + x20u2b + 2x0cov(a, b) + b2u2x + σ2ε (x0)
=1∑w 2i
+(x0 − x)2∑
i w2i x
2i
+ b2u2x + σ2ε (x0).
En remplaçant w2
i par 1/σ2, et dans l'hypothèse d'une incertitude uniforme sur Y(σε(X ) ≡ σ), on dérive l'expression pour la régression par moindres carrés�ordinaire�
u2y =σ2
N+σ2 (x0 − x)2∑
i x2
i
+ b2u2x + σ2.
P. Pernot Propagation des incertitudes March 24, 2015 116 / 118
Prédiction directe
Selon les scenarii, plusieurs simpli�cations sont possibles et on retrouve desexpressions d'usage courant:
X sans incertitude et on veut l'incertitude sur l'estimation de la valeur
moyenne de Y (�con�ance�)
uy = σ
√1
N+
(x0 − x)2∑i x
2i
X sans incertitude et on veut l'incertitude sur l'estimation d'une valeurunique de Y (�prediction�)
uy = σ
√1 +
1
N+
(x0 − x)2∑i x
2i
Autre exemple: Possolo, A. (2013), Five examples of assessment and expressionof measurement uncertainty. Appl. Stochastic Models Bus. Ind. 29:1�18. doi:10.1002/asmb.1947
P. Pernot Propagation des incertitudes March 24, 2015 117 / 118
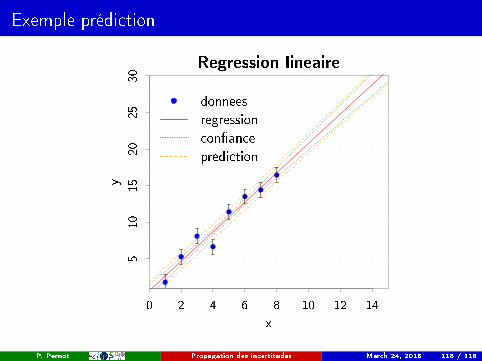
Exemple prédiction
0 2 4 6 8 10 12 14
510
15
20
25
30
x
y
Regression lineaire
donnees
regression
con�ance
prediction
P. Pernot Propagation des incertitudes March 24, 2015 118 / 118