integration of representation into goal- driven behavior-based robots by dr. maja j. mataric`...
Post on 21-Dec-2015
225 views
TRANSCRIPT
Integration of Integration of Representation Into Goal-Representation Into Goal-
Driven Behavior-Based Driven Behavior-Based RobotsRobots
By Dr. Maja J. Mataric`By Dr. Maja J. Mataric`
Presented by Andy KlempauPresented by Andy Klempau

IntroductionIntroduction
Hybrid system Hybrid system separatesseparates reactive low level reactive low level actions from deliberative decision actions.actions from deliberative decision actions.
Alternative to Hybrid approach is Behavior-Alternative to Hybrid approach is Behavior-Based system.Based system.
Behavior-Based system Behavior-Based system combinescombines a reactive a reactive subsumption foundation with a decision maker.subsumption foundation with a decision maker.
Toto is a Behavior-Based robot that explores Toto is a Behavior-Based robot that explores dynamic office environments, identifies dynamic office environments, identifies landmarks, maps the landmarks, and uses the landmarks, maps the landmarks, and uses the map for path planning.map for path planning.
OutlineOutline
Toto’s StructureToto’s Structure
Basic Navigation ( Exploring )Basic Navigation ( Exploring )
Landmark DetectionLandmark Detection
Mapping LandmarksMapping Landmarks
Path PlanningPath Planning
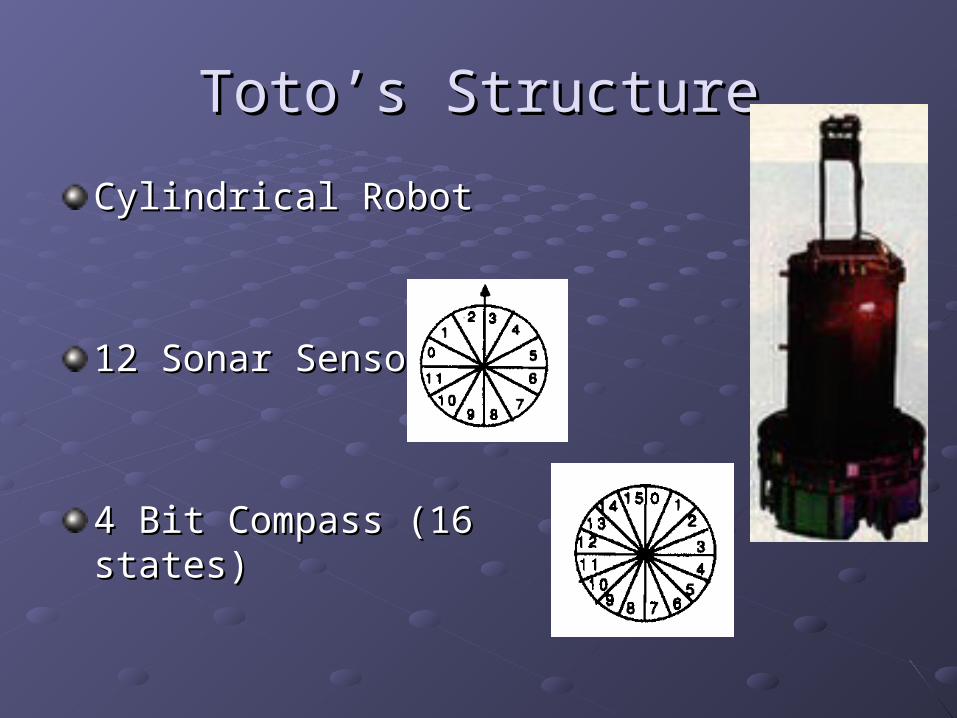
Toto’s StructureToto’s Structure
Cylindrical RobotCylindrical Robot
12 Sonar Sensors12 Sonar Sensors
4 Bit Compass (16 states)4 Bit Compass (16 states)
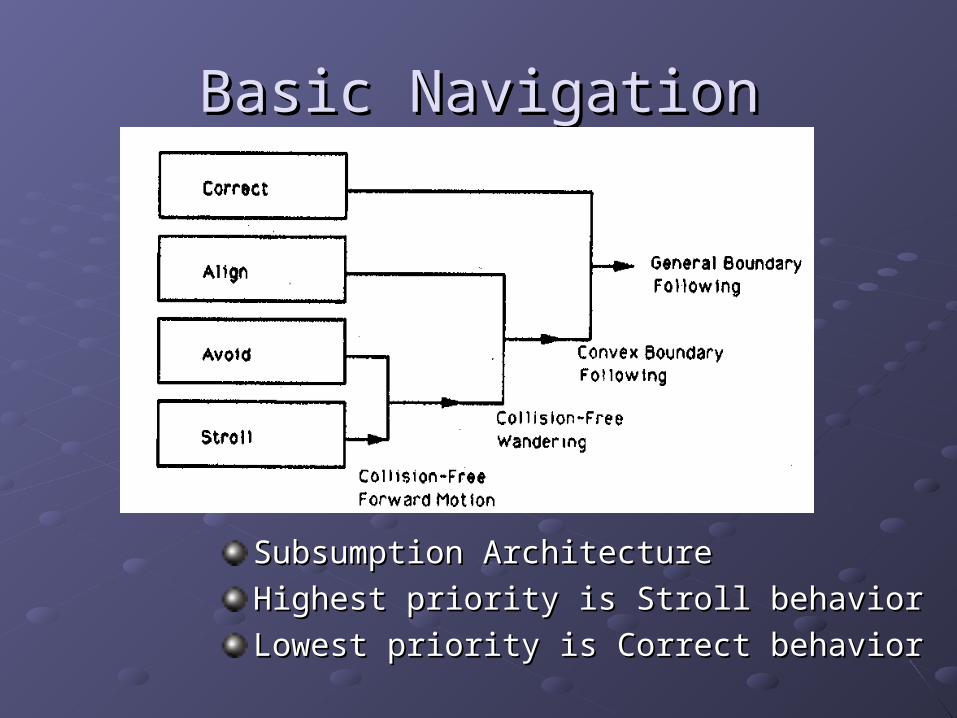
Basic NavigationBasic Navigation
Subsumption ArchitectureSubsumption Architecture
Highest priority is Stroll behaviorHighest priority is Stroll behavior
Lowest priority is Correct behaviorLowest priority is Correct behavior
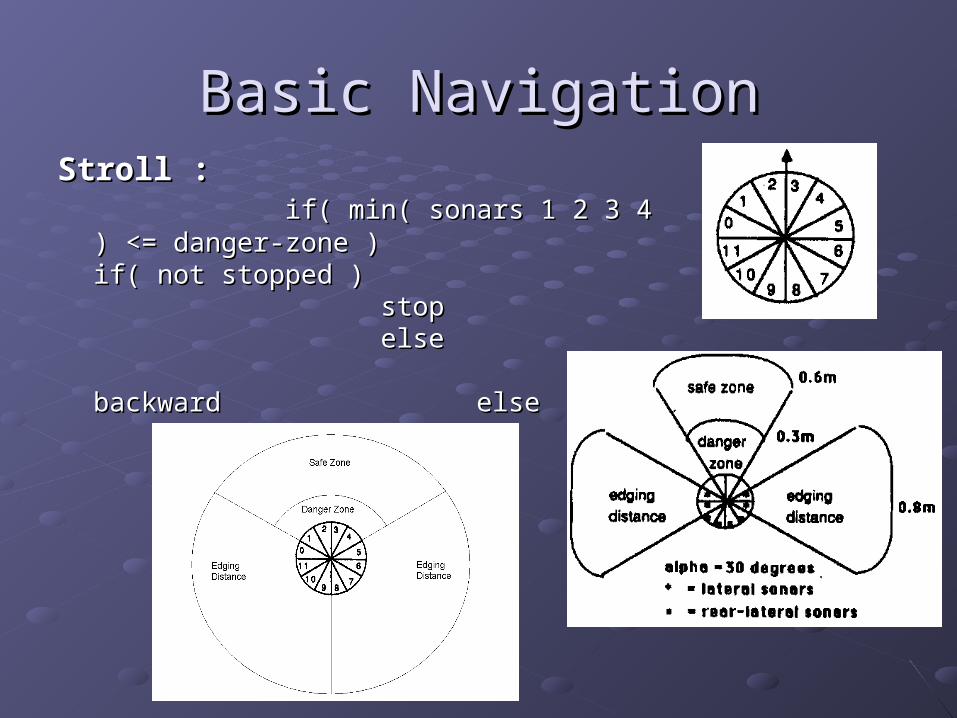
Basic NavigationBasic NavigationStroll :Stroll :
if( min( sonars 1 2 3 4 ) <= danger-zone if( min( sonars 1 2 3 4 ) <= danger-zone )) if( not stopped )if( not stopped )
stopstopelseelse
move backwardmove backward elseelse
move forwardmove forward
Basic NavigationBasic Navigation
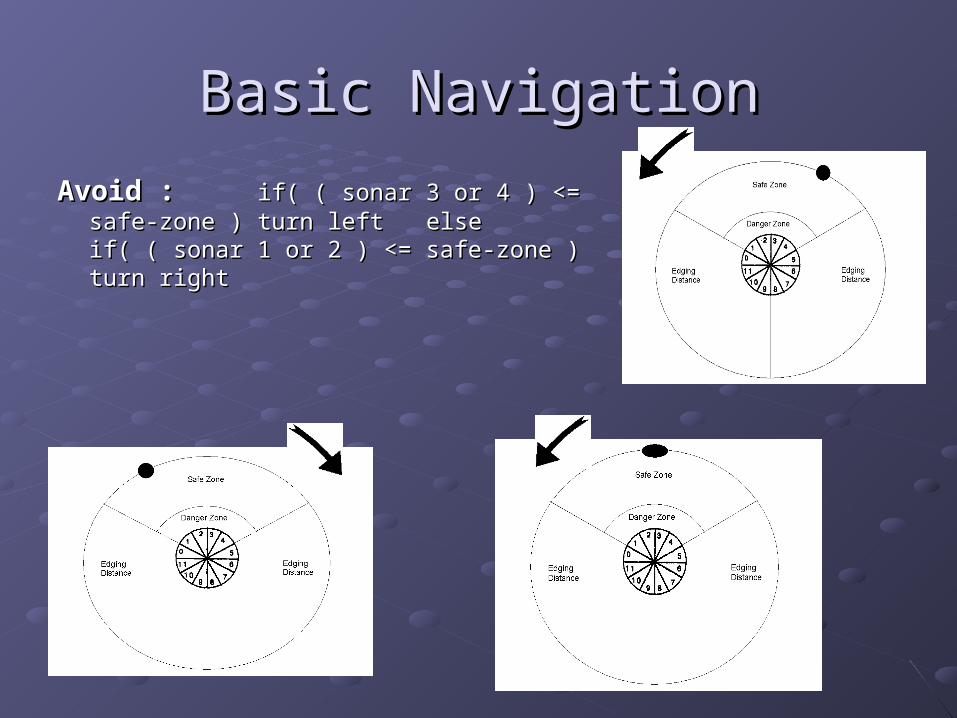
Avoid :Avoid :if( ( sonar 3 or 4 ) <= safe-zone )if( ( sonar 3 or 4 ) <= safe-zone )
turn leftturn leftelse if( ( sonar 1 or 2 ) else if( ( sonar 1 or 2 )
<= safe-zone )<= safe-zone ) turn rightturn right

Basic NavigationBasic Navigation
Align :Align :
if( ( sonar 7 or 8 ) < edging-distance ANDif( ( sonar 7 or 8 ) < edging-distance AND( sonar 5 or 6 ) > edging-( sonar 5 or 6 ) > edging-
distance )distance ) turn rightturn rightif( ( sonar 9 or 10 ) < if( ( sonar 9 or 10 ) <
edging-distance ANDedging-distance AND ( sonar 11 or ( sonar 11 or 0 ) > edging-distance )0 ) > edging-distance ) turn leftturn left

Basic NavigationBasic Navigation
Correct :Correct :if( sonar 11 < edging-distance ANDif( sonar 11 < edging-distance AND
sonar 0 > edging-distance )sonar 0 > edging-distance )turn leftturn left
if( sonar 6 < edging-distance AND if( sonar 6 < edging-distance AND sonar 5 > edging-sonar 5 > edging-
distance )distance ) turn rightturn right

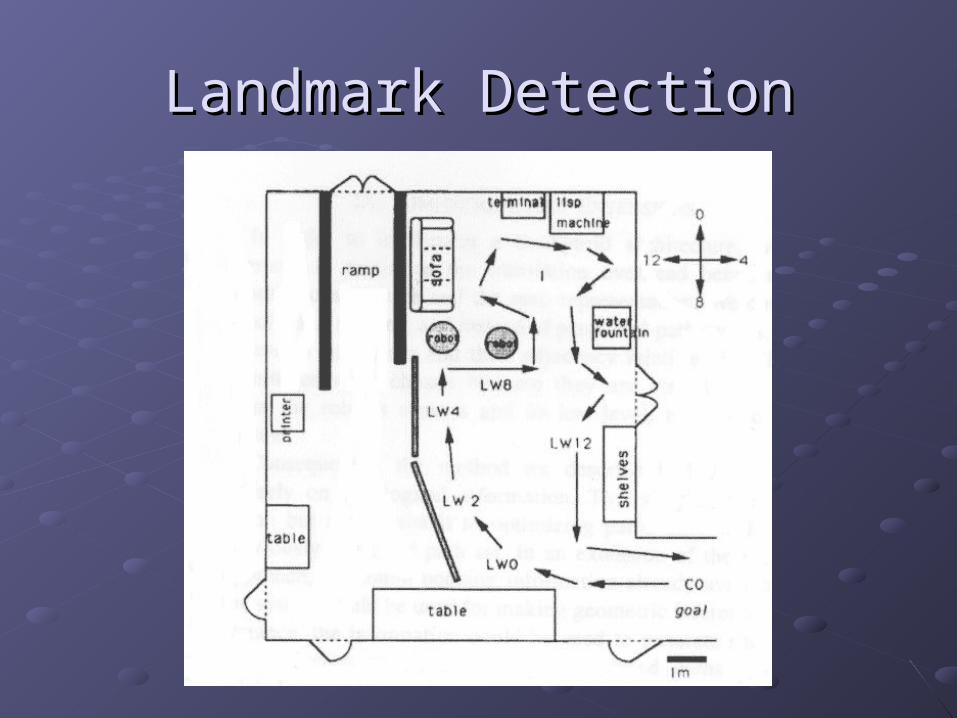
Landmark DetectionLandmark Detection
4 types of landmarks:4 types of landmarks: Right wall (RW); consistent right wall and consistent Right wall (RW); consistent right wall and consistent
direction.direction. Left wall (LW); consistent left wall and consistent Left wall (LW); consistent left wall and consistent
direction.direction. Corridor (C); consistent left and right walls and Corridor (C); consistent left and right walls and
consistent direction.consistent direction. Irregular (I); inconsistent walls and inconsistent Irregular (I); inconsistent walls and inconsistent
direction.direction.
How does Toto identify landmarks?How does Toto identify landmarks?ConfidenceConfidenceCounter!Counter!

Landmark DetectionLandmark Detection
After a time interval, sonar and compass After a time interval, sonar and compass readings are taken.readings are taken.Confidence Counter increments when Confidence Counter increments when sonar and compass readings are the same sonar and compass readings are the same as last time interval.as last time interval.Predetermined threshold identifies how Predetermined threshold identifies how many time intervals are needed to justify a many time intervals are needed to justify a landmarklandmark
Landmark DetectionLandmark Detection
Mapping LandmarksMapping Landmarks
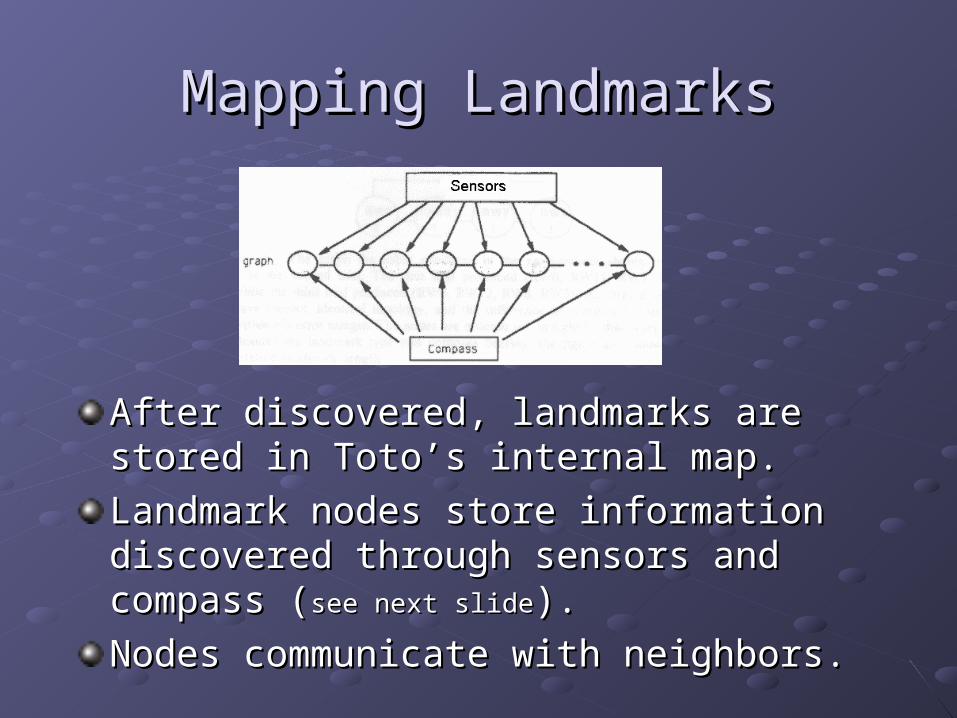
After discovered, landmarks are stored in After discovered, landmarks are stored in Toto’s internal map.Toto’s internal map.
Landmark nodes store information discovered Landmark nodes store information discovered through sensors and compass (through sensors and compass (see next slidesee next slide).).
Nodes communicate with neighbors.Nodes communicate with neighbors.
Mapping LandmarksMapping Landmarks
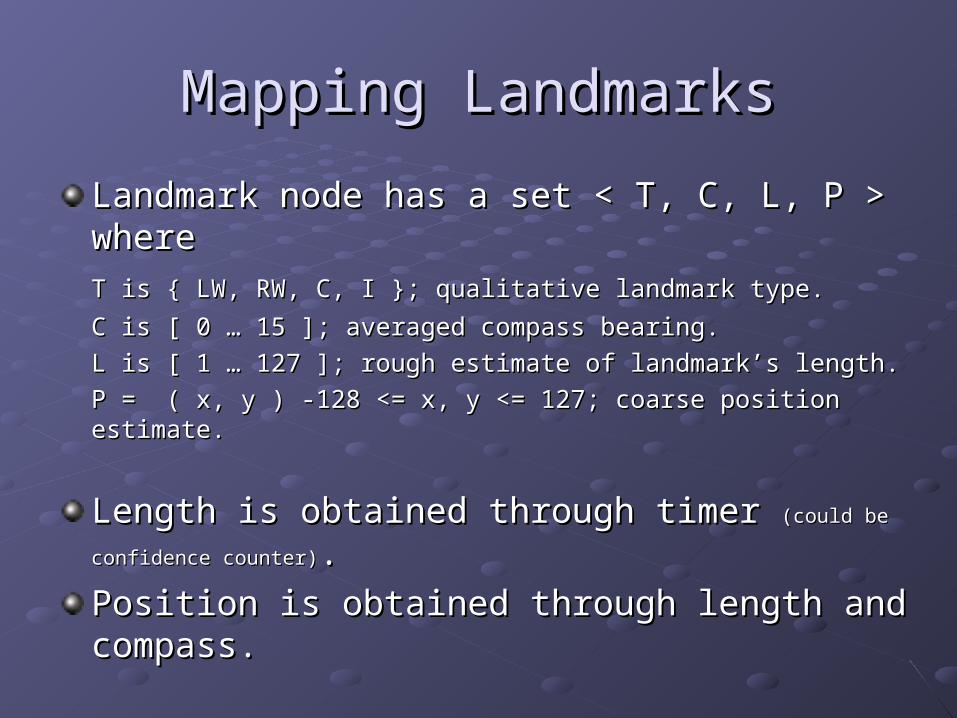
Landmark node has a set < T, C, L, P > whereLandmark node has a set < T, C, L, P > where
T is { LW, RW, C, I }; qualitative landmark type.T is { LW, RW, C, I }; qualitative landmark type.
C is [ 0 … 15 ]; averaged compass bearing.C is [ 0 … 15 ]; averaged compass bearing.
L is [ 1 … 127 ]; rough estimate of landmark’s length.L is [ 1 … 127 ]; rough estimate of landmark’s length.
P = ( x, y ) -128 <= x, y <= 127; coarse position estimate.P = ( x, y ) -128 <= x, y <= 127; coarse position estimate.
Length is obtained through timer Length is obtained through timer (could be confidence (could be confidence
counter)counter)..
Position is obtained through length and Position is obtained through length and compass.compass.

Mapping LandmarksMapping Landmarks
Example:Example:
Path PlanningPath Planning
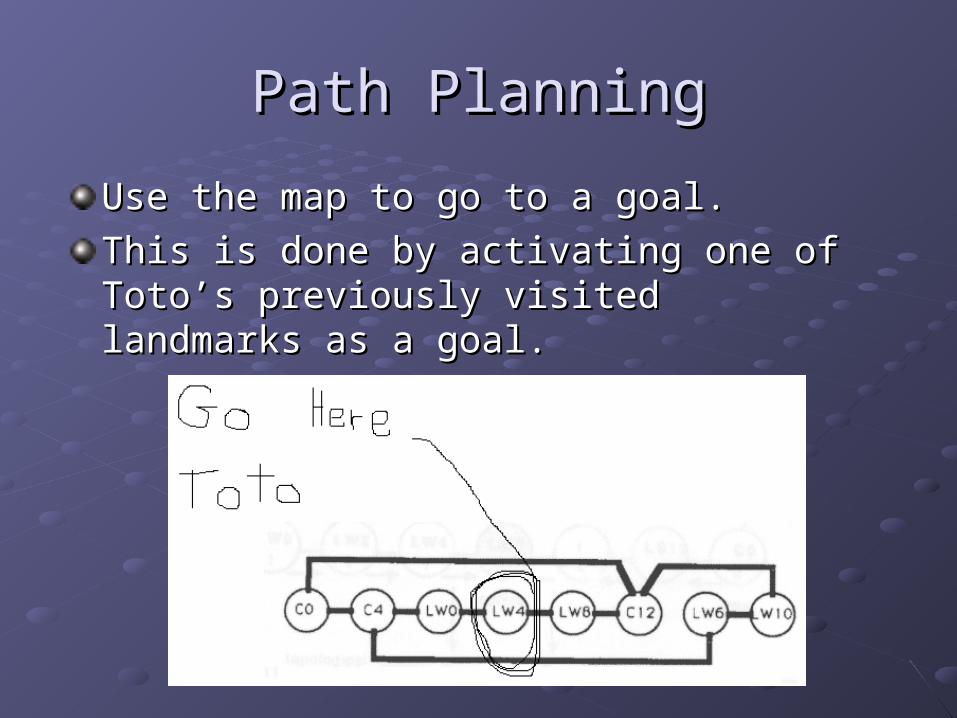
Use the map to go to a goal.Use the map to go to a goal.
This is done by activating one of Toto’s This is done by activating one of Toto’s previously visited landmarks as a goal.previously visited landmarks as a goal.
Path PlanningPath Planning
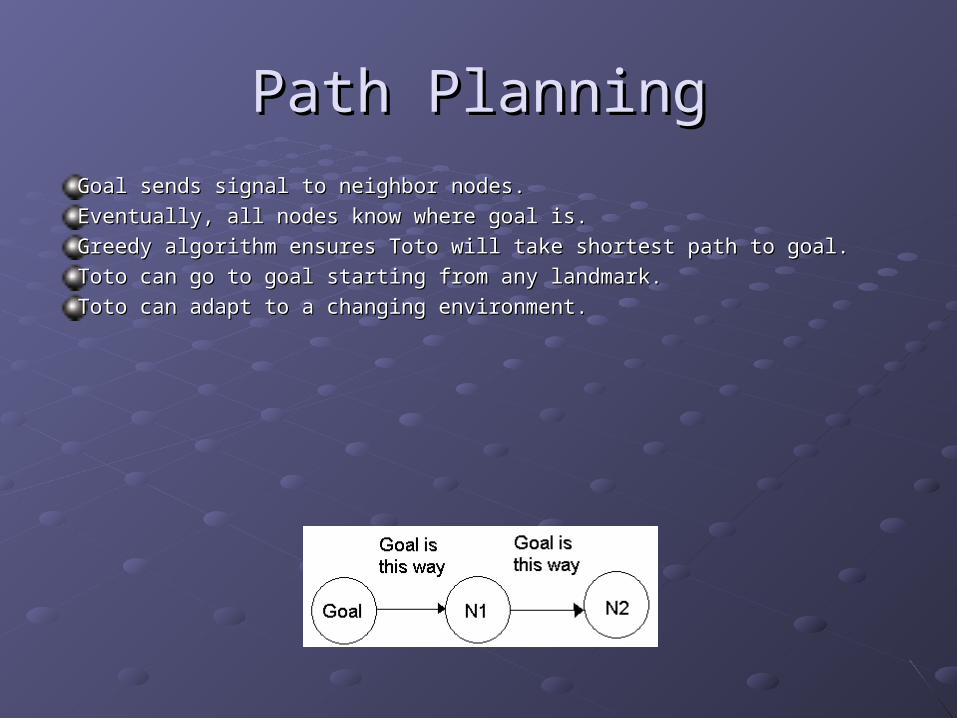
Goal sends signal to neighbor nodes.Goal sends signal to neighbor nodes.
Eventually, all nodes know where goal is.Eventually, all nodes know where goal is.
Greedy algorithm ensures Toto will take shortest path to goal.Greedy algorithm ensures Toto will take shortest path to goal.
Toto can go to goal starting from any landmark.Toto can go to goal starting from any landmark.
Toto can adapt to a changing environment.Toto can adapt to a changing environment.

ReviewReview
ExploresExplores
Finds landmarksFinds landmarks
Stores landmarks in Stores landmarks in mapmap
Goes to goalGoes to goal
ConclusionConclusion
Toto explores, maps, plans, and finds Toto explores, maps, plans, and finds goals goals withoutwithout Deliberative or Hybrid Deliberative or Hybrid process.process.
Toto “extends the repertoire of integrated Toto “extends the repertoire of integrated reactive systems to tasks requiring spatial reactive systems to tasks requiring spatial modeling and user interaction.”modeling and user interaction.”
Toto can adapt to a dynamic environment.Toto can adapt to a dynamic environment.

DiscussionDiscussion
Is linear-time path planning reactive?Is linear-time path planning reactive?
Can a Behavior-Based system do anything Can a Behavior-Based system do anything a hybrid system can do?a hybrid system can do?
How is the open-space behavior How is the open-space behavior triggered? triggered?