m2794.007700 smart materials and design
TRANSCRIPT

M2794.007700 Smart Materials and Design
School of Mechanical and Aerospace Engineering Seoul National University
http://[email protected]
Introduction to Smart Materials
1
March 2, 2017
Prof. Sung-Hoon Ahn (安成勳)

Outline
Introduction to smart materials
Introduction to composite
Introduction to shape memory effect and shape memory alloy
Introduction to electro-active polymer
Application examples of smart materials to engineering
© Sung-Hoon Ahn
Instructor Prof. Sung-Hoon Ahn, Director of Innovative Design and Integrated Manufacturing (IDIM) lab
Textbook and references1. Issac M. Daniel, “Engineering Mechanics of Composite Materials”
2. Ronald F. Gibson, “Principles of Composite Material Mechanics”, McGraw-Hill
3. 4. Dimitris C. Lagoudas, “Shape Memory Alloys”, Springer
4. K. Otsuka and C. M. Wayman, “Shape Memory Materials”, Cambridge
5. Kwang J. Kim and Satoshi Tadokoro, “Electroactive Polymers for Robotic Applications”, Springer
Class schedule Refer to the hard copy
TA Ho-jin Kim, [email protected], Room 323@313
Yingjun Quan, [email protected], Room 1402@301
Notice
Agreement of collect personal information (picture, name, department)
Agreement of Non-Disclosure
3
Course information

© Sung-Hoon Ahn
2017 spring smart materials and design – Grade
Category Percentage
Attendance 20 %
Homework 20 %
Term project
1st presentation 10 %
2nd presentation 10 %
3rd presentation 10 %
4th presentation 30 %
Total 60 % (50%+10% internal evaluation)
Total 100 %
Individual contribution will be included in term project
4

© Sung-Hoon Ahn
Issues to be covered in this class
Composite
Analysis of lamina
Classical lamination theory
Manufacturing processes
Shape memory effect (SME) and shape memory alloy (SMA)
Fundamental theory of shape memory alloy
Thermomechanical characteristics and constitutive modeling
SMA fabrication processes
Design of SMA and its applications
Electroactive polymer (EAP)
Fundamental theory and types of EAP
Design and fabrication processes of EAP
Piezoelectric materials (PZT)
Introduction to PZT materials
5

© Sung-Hoon Ahn
6
Robotics and biomimetics Architecture and structural health monitoring
APPLICATIONS Of Smart materials
Automobile
Spacecraft
Electronics
Fencing wear
Sports / QoLT
Biomedical

© Sung-Hoon Ahn
NASA morphing aircraft
7https://www.youtube.com/watch?v=vR3T8mdpdTI

© Sung-Hoon Ahn
NASA morphing wing
8https://www.youtube.com/watch?v=vR3T8mdpdTI

© Sung-Hoon Ahn
BMW morphing car
9https://www.youtube.com/watch?v=kTYiEkQYhWY

© Sung-Hoon Ahn
BMW Unveils Shape-Shifting Car
10https://www.youtube.com/watch?v=S6bGTjsL9yU

© Sung-Hoon Ahn
Nokia phone
11https://www.youtube.com/watch?v=ovqDMvsWuvc

© Sung-Hoon Ahn
RoboBee micro air vehicle
12https://www.youtube.com/watch?v=GEeuZqAW9vE&t=10s

© Sung-Hoon Ahn
Nitinol stent deployment
13https://www.youtube.com/watch?v=22OBH3M1oYE

© Sung-Hoon Ahn
Head piezoelectric ski
14https://www.youtube.com/watch?v=htKZnko-S28

© Sung-Hoon Ahn
Bridge structural health monitoring
15https://www.youtube.com/watch?v=s75SndFomr4

© Sung-Hoon Ahn
Turtle Mimetic Flipper
@ IDIM lab15

© Sung-Hoon Ahn
Soft robotic gripper and wrist
17
Gripper with hinged fingers Wrist and curved gripper
@ IDIM lab

© Sung-Hoon Ahn
Deployable soft composite structures
18Wang, W., Rodrigue, H., Ahn, S. H. Deployable Soft Composite Structures. Sci. Rep. 6, 20869 (2016).

© Sung-Hoon Ahn
4D Printed SMP (Shape Memory Polymer)
19https://www.youtube.com/watch?v=SpqHwtdRdCI
© Sung-Hoon Ahn
Big Hero
20
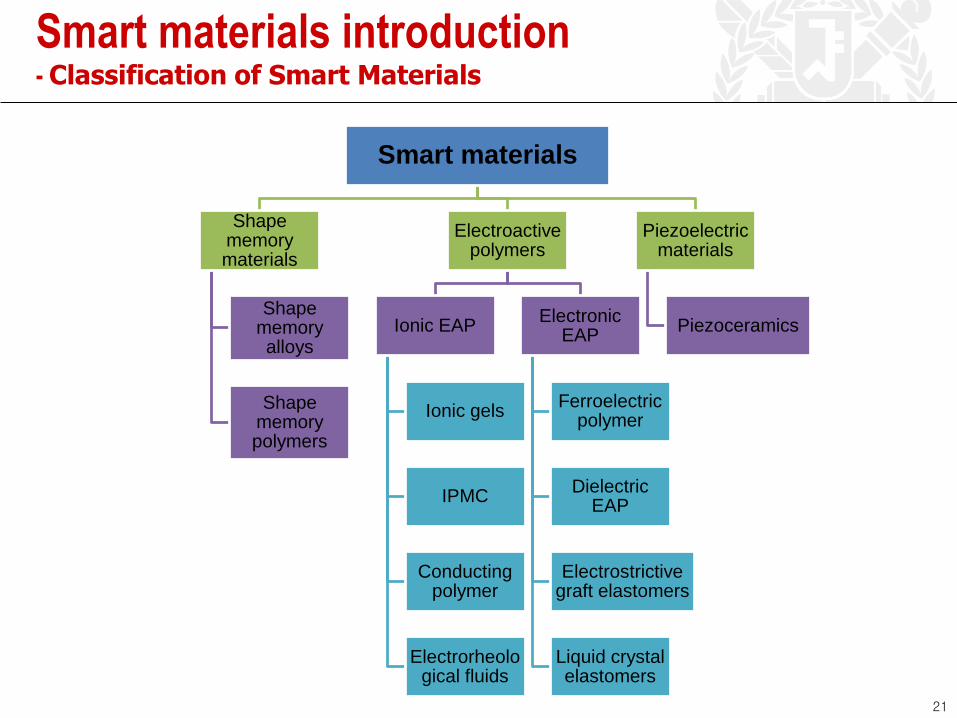
Smart materials introduction - Classification of Smart Materials
21
Smart materials
Shape memory materials
Shape memory alloys
Shape memory polymers
Electroactivepolymers
Ionic EAP
Ionic gels
IPMC
Conducting polymer
Electrorheological fluids
Electronic EAP
Ferroelectric polymer
Dielectric EAP
Electrostrictivegraft elastomers
Liquid crystal elastomers
Piezoelectric materials
Piezoceramics

Comparison of Smart Materials
22
Characteristics SMA IPMC PZT
Voltage (V) Low (>2) Low (>1) High (>100)
Strain (%) Medium (>5) Large (>40) Small (0.2)
Stress (MPa) Large (>200) Low (0.3) Large (110)
Actuation
Frequency (Hz)Slow (~20) Fast (<100)
Very Fast
(~10,000)
SMA based high
frequency actuator
PZT actuated RoboBee
wing (120 Hz)
IPMC artificial muscle slowly
oscillating at 0.15-1 Hz
Wood R, Nagpal R, Wei G Y. Flight of the Robobees. Scientific American, 2013, 308(3): 60-65.
https://www.youtube.com/watch?v=GpLcA5YCwls
20 Hz

© Sung-Hoon Ahn
Biomimetic swimming robots Mechanical linkages are required to achieve complex motion of nature
Mechanical linkages are heavy and stiff
Development of AUVs (Autonomous Underwater Vehicles)
Biomimetic swimming robots using conventional actuators (motors and pistons)
Galatea
(2009)
17 DC servomotors, 30WAQUA
(2004)
6 DC servomotors, 36W
22
Invisible underwater robot, MIT (2017)
Soft octopus robot (2014)
(pectoral fin)
3 DC servomotors, 30W
AquaPenguin (2009)
(tendon driven, motor based)
Jellyfish, Virginia Tech (2012)

Comparison of Actuation Method forUnderwater Robots
24
15
Smart Actuator
Motor
57
22 13
2317
26
11,16
20,212728
96,25
17
18
8
10
19
7 24
52
51
45
62
67
61
66
70
4 55,58,59
63,64 53
49
65
48
45
68
56
54
60
Chu W. S., et al. Review of biomimetic underwater robots using smart actuators.
International Journal of Precision Engineering and Manufacturing, 2012, 13(7): 1281-1292.
IDIM turtle robot
AquaPenguin (2009)
3 DC servomotors

© Sung-Hoon Ahn
Shape memory alloyMetallic alloys that undergo a solid-to-solid phase
transformation which can exhibit large recoverable
strains. Example: Nitinol.
Shape memory effect
Pseudoelastic effect
Shape Memory Alloy (SMA)
25
SMA Spring vs Hot Water
e
T
Cooling
Detwinning
Heating/Recovery
s
s Mf
s Ms
s Af
s As
s
e
Shape memory effect Pseudoelastic effect
Phase transformation of SMAMf: Martensite finish temperature
Ms: Martensite start temperature
As: Austenite start temperature
Af: Austenite finish temperature

© Sung-Hoon Ahn
Shape Memory Alloy (SMA)
26
Soft autonomous earthworm robot at MIT
SMA coil spring actuator Working principle
Manufacturing
Working principle
Simple manufacturing system enables the fabrication of long strand coiled springs of NiTi
muscle fiber. The core wire is under tension and an NiTi wire
is wound around the core. The guidance tube is slightly
larger than the core wire. The tension of the NiTi wire is
maintained by friction between NiTi and the long bar.
Seok S, et al. Mechatronics, 2013, 18: 1485-1497.

SMA based high frequency actuator
Higher heat dissipation rate
The phase changes of SMA wire determine the
actuating characteristic of actuator.
To increase actuating speed, rapid heating and
cooling of SMA wire are required.
SMA wire
Method of increasing heat dissipation rate
Decreasing SMA thickness
Higher heat dissipation rate
26
Fast actuating actuator
© Sung-Hoon Ahn
Ionic Polymer-Metal Composite (IPMC)
28
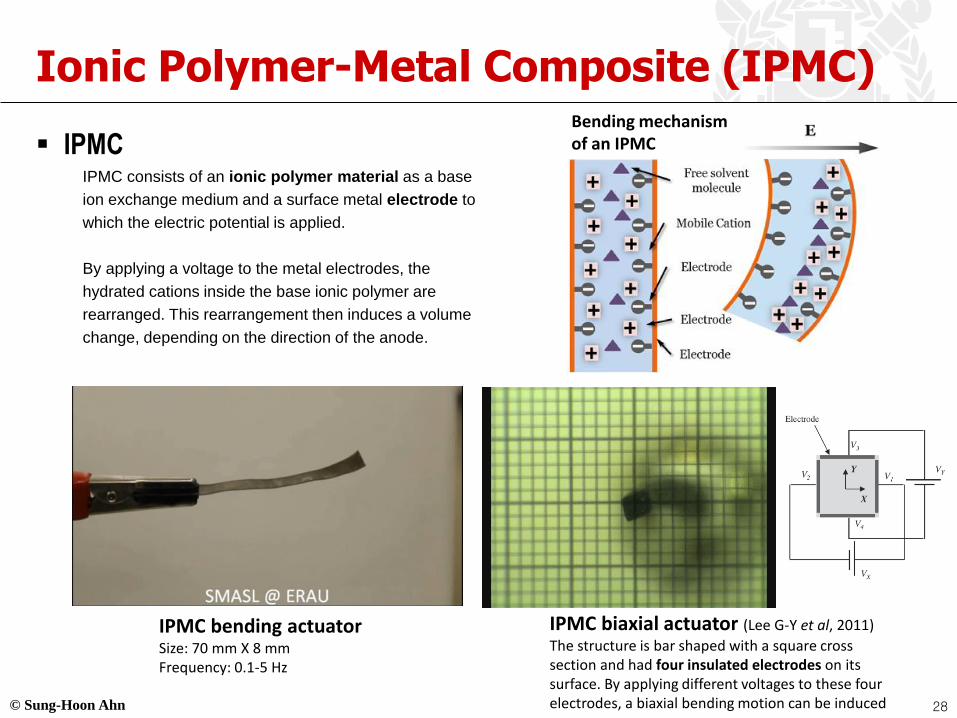
IPMCIPMC consists of an ionic polymer material as a base
ion exchange medium and a surface metal electrode to
which the electric potential is applied.
By applying a voltage to the metal electrodes, the
hydrated cations inside the base ionic polymer are
rearranged. This rearrangement then induces a volume
change, depending on the direction of the anode.
Bending mechanism of an IPMC
IPMC bending actuatorSize: 70 mm X 8 mmFrequency: 0.1-5 Hz
IPMC biaxial actuator (Lee G-Y et al, 2011)
The structure is bar shaped with a square cross section and had four insulated electrodes on its surface. By applying different voltages to these four electrodes, a biaxial bending motion can be induced

© Sung-Hoon Ahn
Negative Poisson’s ratio
29
Auxetic lattice of multipods
Pikhitsa P V, Choi M, Kim H J, et al. Auxetic lattice of multipods. physica status solidi (b), 2009, 246: 2098-2101

© Sung-Hoon Ahn
Origami & Kirigami structure
30
Origami structure & Kirigami structure
A traditional art form of paper folding and cutting, has been of increasing interest to mathematicians and engineers
morphing structures and energy absorption structures/devices utilizing origami patterns

EXAMPLES OF
PREVIOUS PROJECTS
31

© Sung-Hoon Ahn
Adaptable Tire via the use of SMA
Adaptable tire characteristics: For rainy and snowy conditions, sufficient tread pattern is required to maintain
the grip with the road.
Both tire compound (composed material) and the tread pattern determines
the driving capabilities
The surface pattern of tire can change using SMA based on condition of road surface
31

© Sung-Hoon Ahn
Morphing wheel for Amphibious vehicle
Operation on ground Operation in water
Bi-stable structure with SMA Switch states between two stable positions
Expansion : by weight and bi-stable structure (water to ground)
Contraction : by SMA wire actuation (ground to water)
* 2015 class presentation 32
© Sung-Hoon Ahn
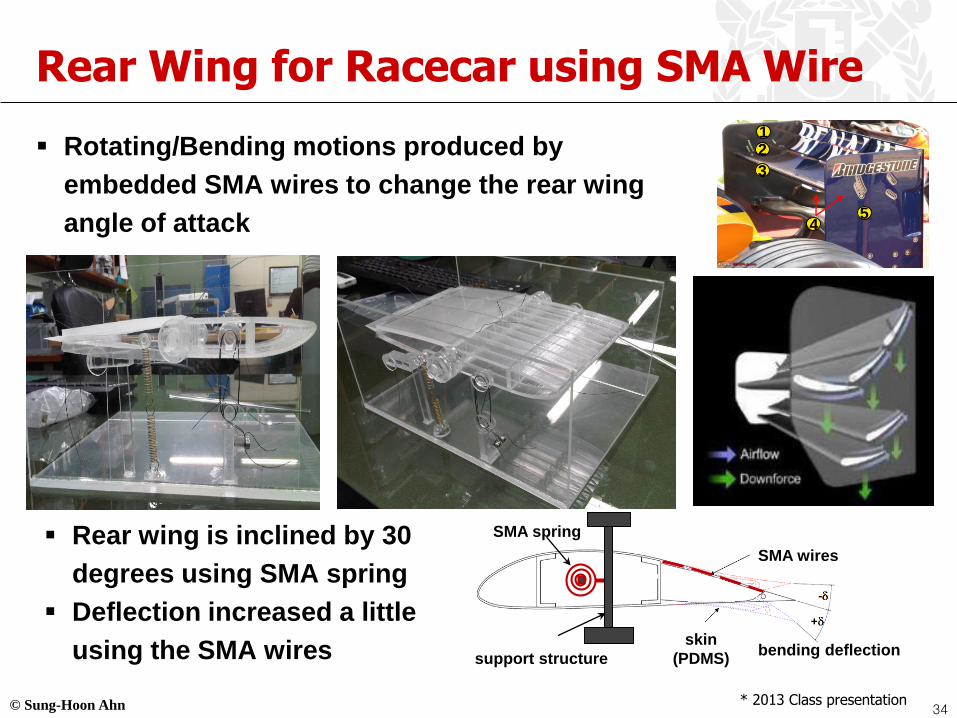
Rear Wing for Racecar using SMA Wire
34
skin
(PDMS)
SMA wires
support structurebending deflection
SMA spring
Rotating/Bending motions produced by
embedded SMA wires to change the rear wing
angle of attack
12
3
45
Rear wing is inclined by 30
degrees using SMA spring
Deflection increased a little
using the SMA wires
* 2013 Class presentation

© Sung-Hoon Ahn
Solar Tracker for Solar Panel
35
Amount of energy harvested can be
optimized by following the trajectory of
the sun
SMA wire is used as sensor & actuator
Increased solar efficiency by 19%
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
40 90 140
Po
wer
(W)
Angle of light
Fixed
Rotated
* 2013 Class presentation

© Sung-Hoon Ahn
Wrist Assistive Device to Prevent CTS
36
A multi-position self-
adjustable wrist support
system was developed to
help prevent Carpal Tunnel
Syndrome (CTS).
SMA wires are used to
adjust individual buckling
elements.
8 modes of deformation are
possible using 3 channels.
* 2013 Class presentation

© Sung-Hoon Ahn
Transformable Wheel using Origami Structure-based Morphing Structure
37
A robot based on origami principle
that is capable of adjusting its
wheel diameter was developed
SMA Spring
Uses a SMA spring to go from the
stretched state to the folded state
Stretched state Folded state
Results presented at IEEE International Conference of Robotics and Automation (ICRA) 2013

© Sung-Hoon Ahn
Biomimetic Underwater Exploring Robot
38
A cuttlefish-inspired robot with SMA embedded in a matrix was built
for underwater exploration.
Multiple actuators in a single fin allow complex deformations.
© Sung-Hoon Ahn
Team formation
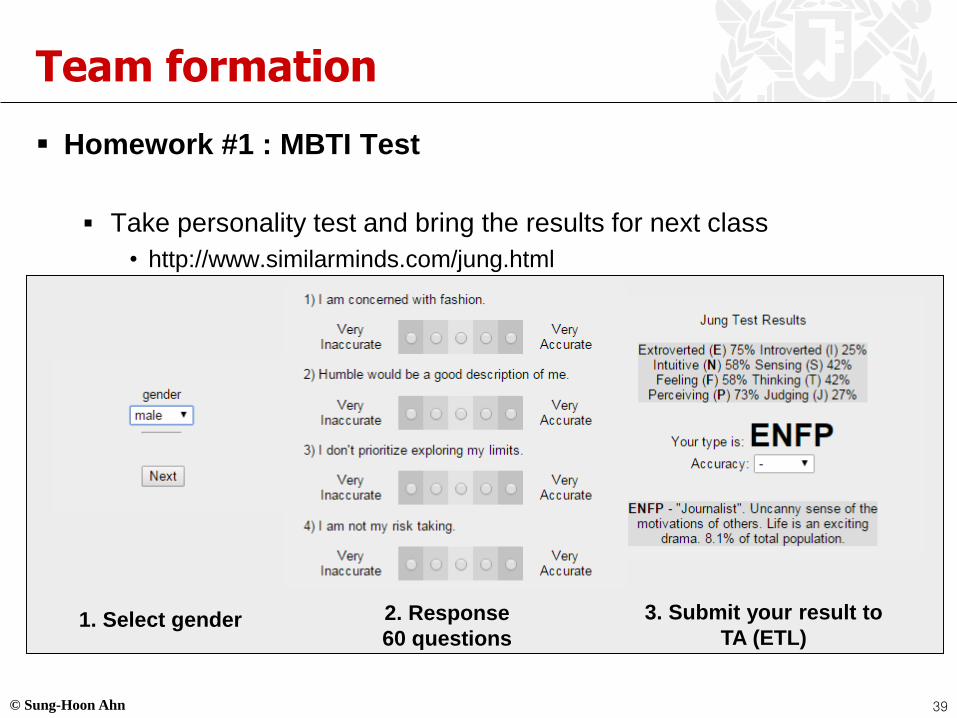
Homework #1 : MBTI Test
Take personality test and bring the results for next class
• http://www.similarminds.com/jung.html
39
1. Select gender 2. Response
60 questions
3. Submit your result to
TA (ETL)