perspective autumn 2012
DESCRIPTION
IEEE PNEC quarterly tech magazine Perspective. Autumn 2012 EditionTRANSCRIPT


AUTUMN 2012 . IEEE PNEC PERSPECTIVE . 2 WWW.IEEEPNEC.ORG
con
ten
ts
p.6
Pneumatic Robotic Arm
BILAL GAHAUR
In the News p. 3
A synopsis of the events conducted by IEEE PNEC since March
Introducing the Mecanum Wheel p. 6
Mecanum wheels are used to provide omni-directional capability to the
vehicle they are installed to. Read through the article to get to know
more about it!
ONIB NASIR & M USMAN YOUSUF
7 years of IEEE PNEC p.9
Read through the journey of IEEE PNEC since its inception. Also get to
know the comments of the important persons associated with IEEE
PNEC since the very beginning.
Implementation of PID in a line following robot p.12
Line following robots have great popularity amongst students and hob-
byists. What greater way to control them then implementing PID!
ADIL FAQAH
Robotic Arm Interfaced with the Internet p.14
Learn about the design and fabrication of a robotic arm controlled via
the internet which was indigenously developed at PNEC
HAMMAD KHALID
Women in Engineering: Dearth of Induction & Retention p.15
After carrying out a survey in South Asia, the analysis behind the major
reasons of the dearth of induction and retention of women in engineer-
ing was done.
REHMA JAVED & RABIA KHALID
Member News p.17
See what the IEEE members have been upto
IEEE PNEC Perspective Volume 4 ● Autumn 2012

In The News
3 . IEEE PNEC PERSPECTIVE . AUTUMN 2012 WWW.IEEEPNEC.ORG
PNEC outshines everyone at Procom.net 2012!
P NEC participated in Procom.net 2012. An annual event held in
NUCES FAST. This year there were a lot of participants from
all across Pakistan. A total of 23 teams from PNEC were partici-
pating in this event. The teams from PNEC did a remarkable job
and brought back laurels. PNEC won the following competi-
tions:
Micro-controller and Interfacing: (Runners up)
Logic Quiz: (Winners) and (Runners up)
I-Quest: (Runners up) and (3rd position)
Hardware Exhibition & Competition: (Runners up)
& (3rd position)
Circuit Designing: (Winners) and (3rd Position)
Career Counseling IV
C areer Counseling Seminars are being organized by IEEE
PNEC for the past 3 years. This year it was held on 5th April
2012. The following companies were a part of this event:
Schneider Electric, MIT Enterprise Forum, Siemens
Pakistan, AINiT, Higher Education Consultancy Firm and Mr. Im-
maduddin who is a PNEC 2002 Graduate and Avanceon.
The representative from Schneider Electric gave detailed explanation
about their company and their recruitment procedure. Mr. Athar Rizvi of
MIT Enterprise Forum guided the audience about being a successful
entrepreneur. Siemens Pakistan, told the students about their recruitment
procedures. The representative briefed about the fieldwork and also
talked about internships. Mr. Levi, from the AINit, Higher Education
Consultancy Firm briefed the students about the benefits of applying to
Australia & New Zealand for higher studies. Mr. Immaduddin, who
shared a bond with the students of PNEC, told them that having self-awareness of what you can do is a vital factor for a bright
future. He explained why PNEC graduates face difficulties in the corporate sector and how it can be minimalized.
Membership Drive 2012
I EEE PNEC Student Branch held its Membership
Drive on 20th April 2012. This drive was con-
ducted basically for the students of Semester 1 to
4, to let them know of the manifested benefit of
joining IEEE and to encourage them to be a part
of this society.
The one and a half hour session consisted of interac-
tive sessions from Hassaan Idrees – the GINI Repre-
sentative of Region 10 who demonstrated the true
benefit of joining IEEE to be an integral part of a fam-
ily of 400,000+ members., Ms. Rabia Khalid –
Pakistan WIE Forum Chairperson and Student Repre-
sentative for South Asia Gold Committee who pre-
sented the various programs of IEEE and their bene-
fits., IEEE PNEC and Mr. Onib Nasir –Chairperson,
IEEE PNEC who gave the students a detailed descrip-
tion about the working of IEEE PNEC. He demon-
strated the various events held under its banner.
By the end of the session students had a better and
clear vision of IEEE and seemed enthusiastic to be-
come a part of it.

In The News
SPARKLE
I EEE PNEC continued with its enlightening weekly series of lectures
by the name of SPARKLE. On Thursday, 19th April a trio of geniuses
- Abdullah Bin Azhar, Waseem Hassan and Usman Rahim from
PNEC were invited to SPARKLE to speak about their Final year Pro-
ject. The Segway, christened Subukraftar, is a self-balancing vehicle for
pedestrians and is one of its
kind in Pakistan. After the
SPARKLE session, everyone
present was allowed to ride the
special vehicle before being
given a fair warning. On 3rd
may 2012, IEEE PNEC invited
Mr. Bilal Zaki and his group
after having won the 2nd best
research paper award at the
International Engineering Mechnaical Convention to discuss his research on object
recognition and its application in goal line technology for football. This session was
attended by many football enthusiasts. On 17th May, Lt. Cdr. Faisal bin Badr con-
ducted a session on Brand Yourself – Become an Entrepreneur. In this session the
basics of entrepreneurship was discussed and students of PNEC were encouraged to
follow this as a profession and way of living.
180 DEGREES— SCRAP TO GADGET
W IE-IEEE PNEC organized its first Scrap to Gadget, coined as 180 Degrees, on 18th May 2012. The basic objec-
tive was to reproduce a given object with available materials. While some participants came to challenge their
creative skills, others came for the sake of 3D Avengers ticket on stake.Each team was given a picture of a trac-
tor and the challenge was to build a 3D model of the tractor. Available material included paper, cardboard,
straw, paper cups, glue and other objects merely for distraction! A total of 14 teams participated in the event with 3 members
each. A panel of three respectable judges, from varying fields came to decide the winner. It included Dr. Sohaib Zia, Mr.
Mustaqeem and S.lt Hina. The points were given on five criteria, innovations, neatness of work, aesthitics of the work, durability
of the design and how pragmatic was the design. Judges questioned each team on their plan of execution and how they had enter-
tained all facets of competition.
AUTUMN 2012 . IEEE PNEC PERSPECTIVE . 4 WWW.IEEEPNEC.ORG

Innovations Pneumatic Robotic Arm by BILAL GAUHAR
Design
Body
T he body consist of two
arms i.e. Primary and sec-
ondary arm . Primary arm
has two portions inclined
with each other at an angle of 120
degrees. Primary arm is attached to
the base using screw contact.
Base
Base is 18 inches long and wide
with a height of 3 inches. The sheet
metal used is 2mm thick. It also has
two vertical supports for primary
arm and primary pneumatic cylinder.
Bed
The bed has length and width of 24
inches and it stands on wooden
blocks screwed to it providing it a
height of 4 inches. It also has a DC
motor attached beneath it which pro-
vides rotational force to the base.
Gripper
The gripper is designed using eight
rigid links. Each link is attached
with the other using pin joints form-
i n g a t u r n i n g p a i r .
Two links connect the gripper arms to
the gripper pneumatic cylinder. The
arms have rubber bushes at the end to
avoid damaging the objects.
Functioning
Pneumatic cylinders are provided
with compressed air at 8 bar pressure.
The primary pneumatic cylinder that
connects primary arm with the base
provides it with an inclination of 30
degrees from home position. Secon-
dary pneumatic cylinder that connects
secondary arm with the primary arm
provides it with an inclination of 80
degrees w.r.t primary arm. Both the
m o v e m e n t s
provide the
machine with
m a x i m u m
h o r i z o n t a l
range of 70cm
and maximum
vertical range
of 40cm.The
D C mo t o r
embedded in the bed provides the
base a rotation of 160 degrees max.
The gripper pneumatic cylinder ex-
tends the gripper arms with the help
of links which enables it to hold any
object with a cross section of 25 cm2.
The entire mechanism is joystick op-
erated
Fabrication
Body panels are made of 2mm thick
sheet metal which is cut using oxy-
acetylene torch. Both the arms are
attached with each other using ex-
tended pin joints providing turning
contact.
Base is made using the same sheet.
Base side panels and support arms are
welded using electric arc welding.
Primary cylinder is fixed to the sup-
port arms using screw contact where
as the primary arm is fixed to the sup-
ports using ball bearings.
Bed is made using 3mm thick sheet
metal. DC motor is embedded into the
bed by cutting a patch in it using
drills and attached using screws.
Wooden blocks are screwed to all the
corners.
Gripper links are milled on a CNC
milling machine. Adjustable pin
joints are made on lathe machine.
Body and base are spray painted.
Future Scope
This project provides an idea for me-
dium weight high speed pick and
place mechanisms to be used in
manufacturing lines having low setup
as well as operating and maintenance
cost. This mechanism can also be
used for various other purposes in
manufacturing industries such as spot
welding, TIG and MIG welding, fas-
tening nuts and bolts at specific
torque by fixing impact wrench in-
stead of gripper.
5 . IEEE PNEC PERSPECTIVE . AUTUMN 2012 WWW.IEEEPNEC.ORG

Innovations Introducing: The Mecanum Wheel by ONIB NASIR & M USMAN YOUSUF
I n recent years,
much work has
been done on the
omni directional
capability of mobile ro-
bots to work in con-
strained areas, overcome
the nonholonomic con-
straints of mobile robots
and also to give a greater
degree of freedom when
working with mobile
robots [1] - [3]. Mecanum
wheel provide the omni
directional capability
which allow the robot to
move in both x and y
directions. Mecanum
wheels have rollers at-
tached to the wheel cir-
cumference at 45 degree
orientation. This wheel
was developed by the
Swedish inventor, Bengt Ilon in 1973 when he was working with the
company Mecanum AB.
Since its inception, the Mecanum wheel has been used in many applica-
tions. It is used to provide maneuverability in constrained areas such as
working in a manufacturing assembly line where the Mecanum wheel is
used in the forklift. It is also used in wheelchairs to provide better move-
ment and easier tracking. The Mecanum based forklift has been used by
the Mercedes manufacturing facility since 2007 and is also being used
by many other companies.
The working of the Mecanum wheel is lim-
ited by the holonomic constraints. Slipping
of the wheels may occur due to the me-
chanical structure of the Mecanum
wheel. During movement, the sub roll-
ers attached may slip and deviate the
mobile robot away from the planned
course. The slipping occurs due to various
reasons and it is not possible for us to overcome those factors rather we
need to monitor the slipping of the Mecanum wheels during operation
and control that through a mechanism. The slipping of the Mecanum
wheels occurs due to weight balancing on the mobile robot, alignment of
the wheels in the correct direction, the motor rpm varying for each of the
motors installed on one of the four wheels, the surface friction which is a
characteristic impedance of the surface and also unevenness of the sur-
face. The slipping occurred can be of two types which is the horizontal
slipping or the rotational slipping. Much research in the previous few
years has been carried out on controlling the slipping of the Mecanum
wheels. Pakpoom Viboochaicheep et al presented a motion control
method that considered the exact dynamics of the vehicle using a posi-
tion detection device, however he only presented the simulation results
and the experimental data was not presented [4]. Akira Shimada et al
introduced a position corrective feedback control using a vision sensor.
The vision sensor used is an expensive method it is also not easy to ob-
tain very accurate results with it [5].
We worked on feedback control from XY
direction quadrature encoders to monitor real
time slipping of the Mecanum wheels. The
shaft encoders used are not directly installed to
the Mecanum wheels as they would experi-
ence the slipping too; rather they are installed
on the three wheel structure omni wheel. The
quadrature shaft encoder provides the absolute
position of the mobile robot and rectifies the
slipping error by monitoring for any deviations from the planned course
for the autonomous mobile robot to follow. The proposed rectification
method to control the slipping of the Mecanum wheel is implemented
on a mobile robot, Omni-Droid and the experimental data is presented in
the paper.
Each Mecanum wheels offers three degree of freedom (x,y,θ). In order
to control slipping of the Mecanum wheel all the three degree of free-
dom are to be monitored and rectified. We have employed a novel idea
of controlling the slipping of the Mecanum wheels by monitoring the
SINCE its inception, the Mecanum
wheel has been used in many appli-
cations. It is used to provide maneu-
verability in constrained areas such
as working in a manufacturing as-
sembly line where the Mecanum
wheel is used in the forklift
AUTUMN 2012 . IEEE PNEC PERSPECTIVE . 6 WWW.IEEEPNEC.ORG
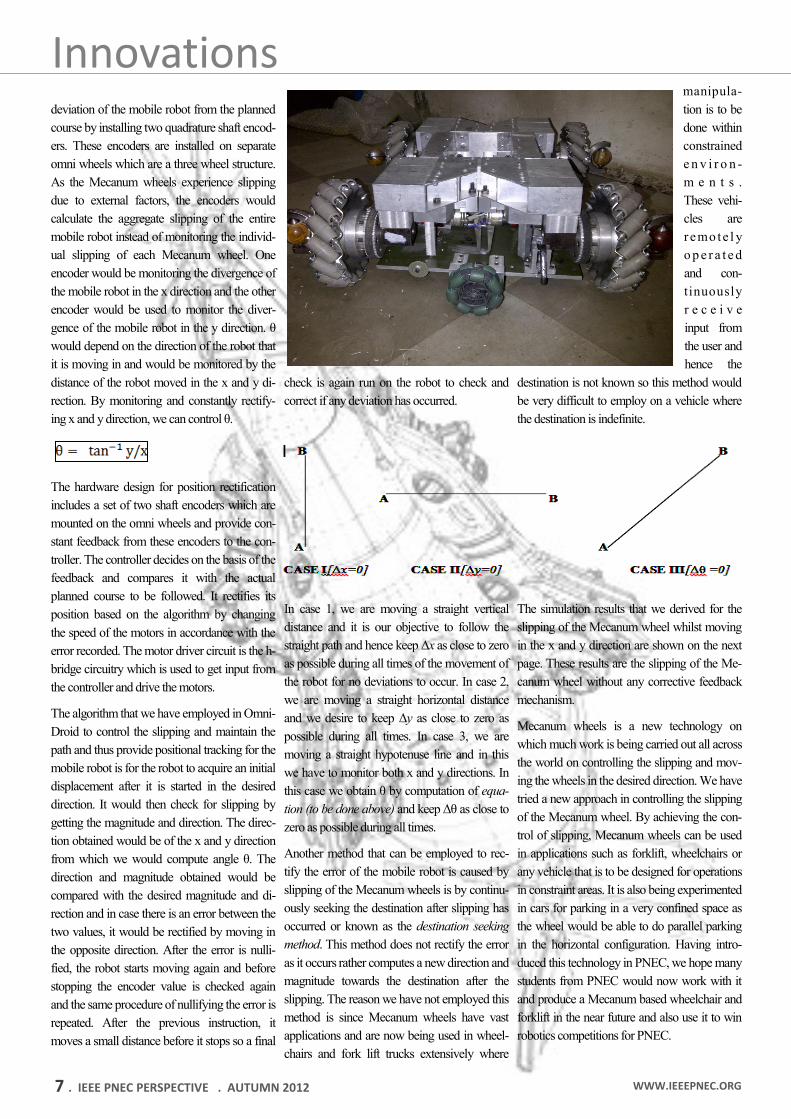
deviation of the mobile robot from the planned
course by installing two quadrature shaft encod-
ers. These encoders are installed on separate
omni wheels which are a three wheel structure.
As the Mecanum wheels experience slipping
due to external factors, the encoders would
calculate the aggregate slipping of the entire
mobile robot instead of monitoring the individ-
ual slipping of each Mecanum wheel. One
encoder would be monitoring the divergence of
the mobile robot in the x direction and the other
encoder would be used to monitor the diver-
gence of the mobile robot in the y direction. θ
would depend on the direction of the robot that
it is moving in and would be monitored by the
distance of the robot moved in the x and y di-
rection. By monitoring and constantly rectify-
ing x and y direction, we can control θ.
The hardware design for position rectification
includes a set of two shaft encoders which are
mounted on the omni wheels and provide con-
stant feedback from these encoders to the con-
troller. The controller decides on the basis of the
feedback and compares it with the actual
planned course to be followed. It rectifies its
position based on the algorithm by changing
the speed of the motors in accordance with the
error recorded. The motor driver circuit is the h-
bridge circuitry which is used to get input from
the controller and drive the motors.
The algorithm that we have employed in Omni-
Droid to control the slipping and maintain the
path and thus provide positional tracking for the
mobile robot is for the robot to acquire an initial
displacement after it is started in the desired
direction. It would then check for slipping by
getting the magnitude and direction. The direc-
tion obtained would be of the x and y direction
from which we would compute angle θ. The
direction and magnitude obtained would be
compared with the desired magnitude and di-
rection and in case there is an error between the
two values, it would be rectified by moving in
the opposite direction. After the error is nulli-
fied, the robot starts moving again and before
stopping the encoder value is checked again
and the same procedure of nullifying the error is
repeated. After the previous instruction, it
moves a small distance before it stops so a final
check is again run on the robot to check and
correct if any deviation has occurred.
In case 1, we are moving a straight vertical
distance and it is our objective to follow the
straight path and hence keep Δx as close to zero
as possible during all times of the movement of
the robot for no deviations to occur. In case 2,
we are moving a straight horizontal distance
and we desire to keep Δy as close to zero as
possible during all times. In case 3, we are
moving a straight hypotenuse line and in this
we have to monitor both x and y directions. In
this case we obtain θ by computation of equa-
tion (to be done above) and keep Δθ as close to
zero as possible during all times.
Another method that can be employed to rec-
tify the error of the mobile robot is caused by
slipping of the Mecanum wheels is by continu-
ously seeking the destination after slipping has
occurred or known as the destination seeking
method. This method does not rectify the error
as it occurs rather computes a new direction and
magnitude towards the destination after the
slipping. The reason we have not employed this
method is since Mecanum wheels have vast
applications and are now being used in wheel-
chairs and fork lift trucks extensively where
manipula-
tion is to be
done within
constrained
e n v i r o n -
m e n t s .
These vehi-
cles are
r emo te l y
o p e r a t e d
and con-
tinuously
r e c e i v e
input from
the user and
hence the
destination is not known so this method would
be very difficult to employ on a vehicle where
the destination is indefinite.
The simulation results that we derived for the
slipping of the Mecanum wheel whilst moving
in the x and y direction are shown on the next
page. These results are the slipping of the Me-
canum wheel without any corrective feedback
mechanism.
Mecanum wheels is a new technology on
which much work is being carried out all across
the world on controlling the slipping and mov-
ing the wheels in the desired direction. We have
tried a new approach in controlling the slipping
of the Mecanum wheel. By achieving the con-
trol of slipping, Mecanum wheels can be used
in applications such as forklift, wheelchairs or
any vehicle that is to be designed for operations
in constraint areas. It is also being experimented
in cars for parking in a very confined space as
the wheel would be able to do parallel parking
in the horizontal configuration. Having intro-
duced this technology in PNEC, we hope many
students from PNEC would now work with it
and produce a Mecanum based wheelchair and
forklift in the near future and also use it to win
robotics competitions for PNEC.
Innovations
7 . IEEE PNEC PERSPECTIVE . AUTUMN 2012 WWW.IEEEPNEC.ORG

We pay our acknowledgements to Bilal Gahaur
who was an integral member of the RoboSprint
team and designed and manufactured the robot
completely on his own. Without him this would
not have had been possible. We also thank the
organizing committee of the RoboSprint at
CASE, who were extremely helpful and a spe-
cial mention for Umer Farooq, who acted as
our team coordinator and guided us at every
step. A special thanks to Dr. Attaullah Memon
for motivating us, supporting us and providing
whatever we needed and to Robotics and Dy-
namic Systems Research Lab for funding our
project and giving us a place to do all our
work.
REFERENCES
[I] P. F. Muir and C. P. Neuman, "Kinematic
Modeling of Wheeled Mobile Robots", Tech-
nical Report No. CMU-RI-TR-86-12, The
Robotics Institute, Carnegie Mellon Univer-
sity, 1986.
[2] P. F. Muir and C. P. Neuman, "Kinematic
Modeling of Wheeled Mobile Robots", Jour-
nal of Robotic Systems, vol. 4, No.2, 1987, pp
281-340.
[3] P.F. Muir and C.P .N euman, "Kinematic
Modeling for Feedback Control of an
OlIUlidirectional Wheeled Mobile Robot",
Proc. IEEE Conference on Robotics and Auto-
mation, Raleigh, NC, 1987, pp 1172-1178.
[4] Pakpoom Viboonchaicheep, Akira Shi-
mada, and Yuhki Kosaka, "Position Rectifica-
tion Control for Mecanum Wheeled OlIUli-
directional Vehicles", Proc. the 29th Annual
Conference of the IEEE Industrial Electronics
Society, Roanoke, VA, USA, 2003, pp. 854-
859.
[5] Shimada A, Yajima S, Viboonchaicheep P,
and Samura K, "Mecanumwheel Vehicle Sys-
tems Based on Position Corrective Control",
the 32nd Annual Conference of IEEE Indus-
trial Electronics Society, 2005, pp. 2077-2082.
[6]Stephen L. Dickerson and Brett D. Lapin,
"Control of an Omni-directional Robotic Ve-
hicle with Mecanum Wheels", Proc. the Na-
tional Telesystems Conference, Vol. I, 1991,
pp. 323-328.
[7] Shinji Kamiuchi and Shoichi Maeyama,
"A Novel Human Interface ofan Omni-
directional Wheelchair", Int. Workshop on
Robot and Human Interactive Communica-
tion, 2004, pp. 101-106.
Simulation Results of Moving in x, slipping in y direction Simulation Results of Moving in y, slipping in x direction
Innovations
AUTUMN 2012 . IEEE PNEC PERSPECTIVE . 8 WWW.IEEEPNEC.ORG

Many things when established are not known to progress and
advance like IEEE PNEC Student Branch has done in the past 7
years. IEEE PNEC was established on 3rd September 2005 with
the aim to progress as a comprehensive society, responsive to
technological change. Since then IEEE PNEC has come a long
way in fulfilling the dream of its founders and the efforts have
not been subsided to constantly innovate and bring up new
ideas for the upbringing of her members and PNEC students.
The Student Branch has seen many ups and downs since her
beginning. After having been established in 2005, Ali Allawala
and Anas Imtiaz took over the branch and came up with a lot of
bright ideas which distinguished IEEE PNEC Student Branch
in a fledgling state from other societies and branches. They set
about to develop a website for the student branch and also re-
lease the first issue of the magazine Perspective for which cop-
ies were distributed to students. They set the tradition and stan-
dard for the times to come which the future ex-com’s had to
keep in mind while operating.
But sadly after the departure of Ali Allawala and Co. the stu-
dent branch saw a trickle in interest and a corresponding de-
cline of activities and membership. There was a lack of enthu-
siasm within the Student Branch coupled with a lack of admin-
istrative support which resulted in the student branch becoming
dormant for a brief period of time.
But as with all good things, there was somebody to rescue
IEEE from the abyss and resurrect it into the society it was en-
visioned to be. The continued efforts of a dedicated teacher
Yasir Khan along with one ambitious student Syed Ali Asad
Rizvi paid off dividends and they were able to revive the stu-
dent branch back to life with some dedicated volunteers such as
Nimra Kazmi, Sameed Ahmed Khan, Jahazaib Kakar and Us-
man Hassan. They organized a series of successful events dur-
ing their tenure which included the Karachi Section Student
Congress, 2nd IEEE International Conference on Computer,
Controls & Communication, initiated the Career Counseling
Seminar which has become a tradition while also helping stu-
dents understand life after graduation and also ponder over the
heap of options available to them and conducted a fun filled
fresher’s week to engage the new batch and provide them an
opportunity for interaction with the seniors. Nimra Kazmi also
successfully initiated the Women in Engineering Affinity
Group during this period.
The torch was then passed to Syed Ahmed Fuad. IEEE PNEC
has not looked back since and has travelled a successful uphill
journey. He found a dedicated executive committee at his dis-
posal that was willing to work and implement new ideas. He set
about to focus on different events with technical and non-
technical events at its forefront. The Career Counseling Semi-
nar was organized again in his tenure along with Quiztronics, a
technical quiz competition. WIE PNEC flourished under his
leadership and established a name for them in the Karachi Sec-
tion and in Pakistan as well. They organized a lot of events
including a trip to Merryville Old Age Home, Women Empow-
erment Seminar, Bake Sale and also initiated Tech Fest. During
his time, IEEE PNEC found her outstanding stalwart volunteer
in Dr. Attaullah Memon who became the IEEE PNEC Student
Branch Mentor and has been guiding the activities of the stu-
dent branch and also have played a pivotal role in all that the
student branch has been able to achieve so far.
After the elections for the student branch, power was trans-
ferred to Rabia Khalid and company. She had phenomenal suc-
cess in leading the student branch and IEEE PNEC was able to
explore new horizons and venture into novel thoughts and
Celebrations 7 years of IEEE PNEC
Celebrating
7 years of excellence
9 . IEEE PNEC PERSPECTIVE . AUTUMN 2012 WWW.IEEEPNEC.ORG

ANAS IMTIAZ says ‘My aim of
attempting to resurrect a nearly
dead and defunct IEEE PNEC stu-
dent branch was to provide a plat-
form for inspired learning, foster a
culture of research and have oppor-
tunities to develop and practice
interpersonal and leadership skills.’
ALI ASAD says ‘The biggest task that we were
faced with was to establish IEEE as functioning
society in PNEC, a body that was important for
reasons beyond just mentioning "IEEE Mem-
ber" on your CV, and to generate sufficient
momentum to make the society self-sustaining.
And today, thanks to the efforts of countless
excellent volunteers like Nimra Kazmi, Hassan
Idress, Fuad Ahmed, IEEE PNEC has become
the society that we envisioned.’
SHEZANA ZULFIAQAR says ‘Happy 7
years of formation to IEEE PNEC and con-
gratulations to all the deserving members and
volunteers who contributed in nurturing the
student branch. IEEE-PNEC has set commend-
able bars in its infancy. Unity, foresightedness
and the glint of bringing about a change can
take it to unimaginable heights. Few areas of
effort: research opportunities and spread of
education.’
BILAL ZAKI says ‘IEEE PNEC
should focus on building on the memberships.
Being one of the most functional
and vibrant student body in the college, it
should also act as a mentor to the other student
bodies lending them support when required to
make PNEC a more happening place. The
society should also keenly focus on involving
its alumnus in their plans and events.’
HASSAAN IDREES says ‘This society was not
only the first place where I volunteered a month
into when I stepped in at University it was also
the only place which connected me to establish a
concrete professional network. The society
helped me visit places, meet academicians and
engineers, learn cross-cultural-collaboration
within Pakistan, in Asia and around the world.’
SYED AHMED FUAD says ‘Each day
brought with it new challenges and exciting
scenarios to deal with. From rejuvenating the
society to rekindling our financial resources;
establishing firm industrial-academic ties and
to encouraging women in our world of engi-
neering. Each event brought more adrenaline
rush than the other.’
RABIA KHALID says ‘IEEE PNEC be-
cause of its exceptional activities not only has
added value to the reputation of the college
but also brought a lot of credit to it over the
past few years. Representatives of IEEE
PNEC are no doubt acknowledged as incom-
parable and extraordinary students in terms of
leaderships, professionalism, quality of work
and commitment to their duties.’
DR. ATTAULLAH MEMON says ‘It
goes without saying that IEEE PNEC is
the most active and vibrant student society
that represents undergraduate students of
nearly all disciplines at PNEC. What es-
sentially differentiates it from others is its
consummate character that lets its student
members freely envision, devise and exe-
cute an assortment of academic and social
activities, which provide for tremendous
opportunities to strengthen their scholarly talents, enhance their pro-
fessional acumen, and raise them as esteemed citizens. ’
Celebrations ideas. The quite famous weekly SPARKLE sessions were held on every Thursdays and a series of robotics workshop was conducted to pro-
mote robotics and its associated technologies. The tech magazine, Perspective was revived and the 2nd issue was released in January 2012
on the theme of communications. Arguably, the outstanding thing done during the year was the development of the website and making it
live. The website has added a new dimension to the student branch and is also representing it and the college online with a global presence.
The focus was just not on technical events, rather fun filled activities were conducted alongside. For this purpose, Minute to Win it, Scaven-
ger Hunt, Bake Sale and a few other activities were held. WIE PNEC conducted her flagship event Techfest II and also visited PN Model
School to create awareness amongst the next generation of girls about university life. The year ended on a big note with the first ever An-
nual General Meeting of the student branch being organized where the review of the complete year was presented along with the Annual
Report and awards being given to the outstanding volunteers.
As of now, Onib Nasir and his executive committee are leading the Student Branch and doing a remarkable job in maintaining the high
standards set by the previous executive committees. IEEE PNEC has had a rich tradition of dedicated and enthusiastic volunteers due to
which it has been able to achieve such accomplishments. During the journey, IEEE PNEC has also treaded on rutted paths and confronted
difficult times but has always emerged victorious. Her history is a telling tale of enthusiasm and hope. The editorial team of Perspective
wishes IEEE PNEC even more success and triumphs in the years to come. Stay blessed!
AUTUMN 2012 . IEEE PNEC PERSPECTIVE . 10 WWW.IEEEPNEC.ORG


Innovations Implementation of PID in a Line Following Robot by ADIL FAQAH
A mongst the numerous different categories of robots, lines following robots are probably the most popular among both
students and robot hobbyists alike.
In implementing line following, the algorithm used is of vital importance to the performance of the robot. Numerous
algorithms are available which rely on different number of sensors and their respective positioning on the robot. However most
one sensor, two sensor and even three sensor designs fall short in performance – speed is compromised and the robot wobbles too
much about the line; wasting both time and battery power. Why does this happen?
If we consider a robot with 3 sensors i.e. left, center and right, a basic algorithm that can be implemented for line following
would be:
If the center sensor sees the line,
Go straight.
If the left sensor sees the line,
Go left.
If the right sensor sees the line,
Go right.
While this algorithm might allow the robot to follow the line somewhat smoothly at low speeds, it
quickly starts to lose its efficiency as the speed is increased. The robot starts wobbling about the
line and if it is going too fast it may well lose control and stop following the line all together
(Figure 1). Furthermore this algorithm has poor efficiency in following angled or arced lines.
All this happens because the algorithm only takes one factor into consideration i.e. is the robot centered over the line? For im-
proved line following, we need to consider 2 more factors i.e. how long the robot has not been centered over the line and how
fast the robot is oscillating about the line.
Hence, a better and more efficient algorithm is one based on PID control system. A Proportional Integral Derivative controller
(PID controller) is a generic widely used control loop feedback mechanism. A PID controller calculates an "error" value as the
difference between a measured process variable and a desired set point. The controller then attempts to minimize the error by
adjusting the control inputs.
Before implementation of the PID controller can be discussed, it is necessary to first go over some of the common terms associ-
ated with it with respect to our application.
Implementation of PID control also has some hardware requirements. There is no use of implementing PID control in a robot
with only 3 sensors. At least 6 to 10 sensors are required. For this example, an 8 sensor design shall be considered (Figure 2).
Figure 1
Target position The ideal position for the robot to be i.e. the center of the line.
Measured position The current position of the robot with respect to the line.
Error The difference between the target position and the measured position. Note: Error can be positive, negative or 0.
Proportional Numerical indication of the extent of deviation of the robot from the center of the line.
Integral Accumulated error over time.
Derivative The rate at which the robot is oscillating about the line.
Kp, Ki and Kd Constant values used to tune the PID controller.
AUTUMN 2012 . IEEE PNEC PERSPECTIVE . 12 WWW.IEEEPNEC.ORG

A couple things to consider in the sensor design:
A greater number of sensors will give a wider error range.
The distance between individual sensors determines the
resolution of the sensor array.
The binary readings from the sensors aid in visualizing the po-
sition of the robot over the line. A 0 indicates the line was de-
tected while a 1 indicates otherwise.
Similarly, a table of all the possible patterns obtainable from
the sensor array can be created with a weighted error value as-
signed to each pattern. Note that the following table isn’t stan-
dard and varies from robot to robot primarily due to spacing
between the individual sensors.
Utilizing the table, the reading from the sensor array can be equ
-ated to its corresponding weighted value to give a numerical
value for error.
With everything done, it is now possible to actually implement
PID control. The algorithm for PID control is as follows:
START: error = target_position – measured_position;
proportional = error*Kp; integral = integral + (error*dt); integral = integral*Ki; derivative = (error – previous_error)/dt; derivative = derivative*Kd; control = proportional + integral + derivative; previous_error = error; wait(dt); Go to START
After implementing the above algorithm, the value of control
can be used to manage the speed of the motors. In a robot with
differential drive, something like the following may be tried:
/*The following is done to ensure we never get a nega-tive value of control and that it doesn’t exceed the speci-fied maximum.*/ if (control > max_speed)
control = max_speed; if (control < - max_speed)
control = -max_speed; left_motor = 80 + control; right_motor = 80 - control;
Once PID control has been implemented, it might be observed
that the robot still doesn’t follow the line smoothly in fact it
may even perform worse than before! This is because the PID
constants Kp, Ki and Kd haven’t been tuned as per the environ-
ment and the characteristics of the robot. The PID controller
may be tuned in the following manner:
1. Set Ki and Kd to 0 and set Kp to 1. Adjust the value of Kp
such that the robot eventually starts to follow the line. If it
is too slow, increase the value. If it is too fast decrease it.
The robot might still wobble a lot; this will be taken care
of.
2. In order to reduce the wobbling of the robot about the line,
start with a Kd value of 1 and gradually increase it to a
suitable value.
3. To tune the integral term, start with a Ki value of 0.1 and
try increasing it in very small (ideally 0.01) increments. A
low value will have no apparent effect on the movement of
the robot however higher values of Ki will make the robot
jerk wildly about the line. Pick a suitable value.
Keep in mind that it isn’t necessary to utilize all the terms of
the PID controller. Most people find that their robot follows the
line just fine using PI only. Experiment with different combina-
tions and different values to figure out what works best for your
robot.
11100111 The robot is centered over the line.
01111111 The robot is to the extreme right of the line.
11111110 The robot is to the extreme left of the line.
11111110 -6
11111100 -5
11111000 -4
11110001 -3
11110011 -2
11110111 -1
11100111 0 (Target position)
11101111 1
11001111 2
10001111 3
00011111 4
00111111 5
01111111 6
11111111 7 or -7 depending on which extreme sensor was last on the line.
13 . IEEE PNEC PERSPECTIVE . AUTUMN 2012
Innovations
WWW.IEEEPNEC.ORG

Innovations Design & Implementation of a Robotic Arm Interfaced with the Internet by HAMMAD KHALID
T he following project was chosen by me, Hammad
Khalid and Umar Yoonus, so that the main results of
this project would signify that remote monitoring and
control of an environment using the internet is not
only feasible but also becoming increasingly desirable. With
the increasing trend towards ‘information on the move’ where
people and services need to be accessed anytime, anywhere, it
seems that the next step is to extend this accessibility to include
our environment – be that our home, workplace or any location.
Our goal was to implement an inexpensive, simple system for
use in multi-tasking robotic applications using computer com-
munication or in other words, operating a robot through internet
or LAN based architecture. In our project we tried to implement
the virtual environment to the user. Different operations on the
robotic arm can be done on the real time system (Client-server
model). Server-end program manages overall interfacing with
the hardware of the robotic arm. Live video streaming is also
available.
We kept the mechanical design of the robotic arm as simple as
possible since a very complicated mechanical assembly would
have been beyond our scope. But maximum effort is placed on
controls and communications. Full emphasis was placed on
making the experience of our robotic arm control as similar as
possible to the experience of completing a hands-on mission.
Operator should not distinguish between maneuvering the mas-
ter device and controlling the actual tool. This is largely de-
pendent on computer controlled electro-mechanical interface.
We started off by designing the mechanical model on paper and
then transferring it on software like AUTO-CAD and CATIA.
A rough sketch was designed keeping in mind the four degrees
of freedom we planned to provide and calculations of torque
and inertia were performed to have the idea of what motors
need to be installed and what will be our weight limitation. Of
course, when practically implemented these calculations proved
to be having slight variations for which we had already kept
enough margin. The mechanical design was then ordered for
fabrication.
Once the mechanical
assembly was in our
hands, we went to
our next phase
which was the de-
velopment of elec-
tronic circuitry. Ini-
tial testing on bread-
board and Vero-
boards was com-
pleted within a
month which was an
essential aid so that
we didn’t mess up in
u final PCBs. Con-
trol of four motors
for the linear, angu-
lar, vertical and
clamping motion of
the robotic arm re-
quired the imple-
mentation of four H-
bridges, a master
controller board
(AVR ATMEGA-
16) was used for
motor selection,
direction and speed
control. A power supply board was implemented to supply
power to all the boards from one DC battery. Since we needed
precision in the linear i.e. forward & reverse motion of the ro-
bot and angular movement we self-developed our encoder
boards with I.R transmitters so that the motor can stop at a par-
ticular number of pulses ad hence on the specified direction.
The next step involved Programming the controller for which
we used CodeVisionAVR. Serial Communication had to be
developed at the slave end between the host computer and the
robot for which we used Visual Basic. An extensive learning
for this language had to be done since we were totally new to it.
The same software was used to develop Internet Control by
first designing a control panel (interface) at the master end and
linking it with our slave end through TCP. For this also
VB.NET proved to be an essential platform. Video Feedback
was provided by an already available software DIGI-
WATCHER.
AUTUMN 2012 . IEEE PNEC PERSPECTIVE . 14 WWW.IEEEPNEC.ORG

Opinion Women in Engineering: Dearth of Induction & Retention by REHMA JAVED & RABIA KHALID
Female Engineers - Why so few?
T here have been various discouraging factors when it comes to perusing engineering and foremost is lack of parent’s encour-agement. With the strong family setup of our society, parents’ opinion becomes extremely significant. However, even today
parents prefer their daughters to opt for medicine. Their concerns con-sists of the small percentage of women in engineering colleges as well as lack of career opportunities for women engineers.
Later when it comes to persuing engineering as a career, guardians are reluctant to allow their daughters to do so. This lack of encouragement further decreases the pool of working engineers. According to a survey conducted at University of Michigan, even at a younger age, parents provided more math-supportive environments for sons than they did for their daughters. As a result of which sons were more prone to opt for technological related fields then daughters later on. [2 ref]
Another major concern is the lack of career counseling. When it comes to making the career choice, it is largely based on trial and error or being inspired by a certain person excelling in his/her profession. As a result women those who choose engineering and those who do not are not aware of the career that would suit them best.
Understanding the significance of co-curricular activities
T o achieve professional excellence, one doesn’t just needs to hone themselves their technically. Participation in co curricu-lar activities is also necessary to develop social skills, which in turn aid in character building.
Pakistan WIE Forum conducted a survey among females enrolled in engineering colleges all over Pakistan. First they were asked which extra curricular activity the female students have mostly been a part of. 64% in all answered in favor of society memberships like IEEE. However, 23% of students answered ‘none’.
The next question targeted the impedances faced by these women while participating in the se activities. The results show that 53% of women believe that there was a lack of opportunities where they could enroll themselves. This is a fair indication that there are not many platforms to enable these female engineers to be dynamic and explore them selves.
It would be fair to mention that many students willingly do not partici-pate in extra curricular activities. It is necessary to educate these souls that being active in such programs teaches you how to be a leader, work in a team and tackle problems in various situations. This cannot be achieved by solely focusing on your engineering degree.
Transition - From a Student to a Professional Engineer
I nternships can teach you more about what you want to do and what you don’t want to do. It also provides you with invaluable soft skills. For many universities, it is mandatory to intern at at least one organization before graduating.
This is conflicting to the PWF survey result where only 54% of women engineers had interned at some organization while pursuing their engi-neering degree. When asked the reason behind the lack of experience, 24% answered that females were not preferred as compared to their male counter parts.
The survey holds as majority of engineering firms involving fieldwork prefer men. Females are generally held to office work and purely white-collar jobs hence drastically limiting their job opportunities. In Pakistan even multi-nationals such as Engro Ltd. discourage women employees on remote-stie locations such as Daharki.
Other reasons included lack of confidence (16%), parental opposition (9%) and to an extent, harassment at work (8%).
It is also noted that men tend to have better special skills then women. To survive at any organization, one needs to excel at communications, effective in planning and excellent in management. All of which can be improved with workshops and training courses. Therefore, those women lacking in confidence or otherwise need to train themselves in these skills if they intend to supersede others in the employment race.
As they say, ‘No one is born a leader’. It is an attribute that has to be developed with time. However, when the female engineers were asked if they had any experience in leading a team, 32% replied in negative. This could be the result of women not given the opportunity to lead a team or they themselves being reluctant to stand in the line of fire.
Even with excellent academic records but with the lack of leadership, special and communication skills it eventually becomes difficult for these women to compete and get hired at respectable firms.
Moral of the story
W e should realize the significance of retaining women in engineering and encouraging those passionate enough to join the field. An emphasis on career counseling sessions from a young age should be made. Society on
the other hand, should accept its share of duties and not bar the fairer sex form entering this profession.
One of the major impedances comes due to the general prejudice against women that has been embedded in the minds of the people. Therefore, we should deal with all these factors so that women can establish them-selves as leaders in this field too as they have in others including medi-cine and business administration.
TODAY, more than ever a nation’s growth depends on technological innovation and hence upon engineering. To tap
all the talent available in our society, we need to pay particular attention to participation of women in the engineering
workforce.
However, Engineering and Sciences has always been a man-dominated field. Be it the discouragement faced by
women to enter this field, lack of career counseling or the hurdles one has to overcome as engineers the outcome is
staggering. As a result of which only a few women choose engineering as a career path.
In the last few years, IEEE Women In Engineering has played its role in motivating school-going students to embrace
fields of sciences and technology. With various seminars and workshops, it also enables women to develop their pro-
fessional skills and discover their true potentials.
15 . IEEE PNEC PERSPECTIVE . AUTUMN 2012 WWW.IEEEPNEC.ORG

Our members make us proud! SHELL ECO MARATHON
Kanza Basit, WIE PNEC Chair, led a team in Shell Eco Marathon Asia
an annual event hosted by Shell annually at Sepang International Circuit,
Malaysia in which students practically apply their engineering knowl-
edge to design and fabricate a fuel efficient vehicle. She led the urban
team BOLT. BOLT recorded a 66km/l track run and also got the 10th
position on the leader board. The urban team also won the 2nd position in
communications awards. They represented the college and Pakistan well
at the international arena
UN WOMEN CONFERENCE
WIE PNEC Chair, Kanza Basit, represented
Pakistan in the UN Women Conference
hosted by Duksung Women’s University,
Seoul, South Korea. The conference was all
about gender equality and empowering
women. It consisted of 8 different topics un-
der which a total of 96 teams were selected to
be a part of the conference from all over Asia
and Africa. The team of Kanza Basit partici-
pated in the poster design competition. Their
idea was to make a smart device application
for women which compiles good education
and good career opportunities. They got the
2nd position in the poster design competition.
The closing of the conference was grand with
UN Secretary General, Ban Ki Moon, being
the chief guest along with Seoul Mayor. It
was good to hear his supporting and ac-
knowledging words for women of the world.
This marked the end of the conference fol-
lowed by a Korean Pop concert.
ASIA PACIFIC REGION 10 SPMP COMMITTEE
The Asia Pacific Region 10 of IEEE has recently initiated a new project ‘Student Professional Mentorship Program’ which would be acting
as a bridge between students and professionals to help student members get professional mentorship, help and advice for their technical
queries. Rabia Khalid, previously the Chairperson IEEE PNEC was appointed as the Student Representative for the Committee. The student
committee was recently finalized and Onib Nasir, the current Chairman IEEE PNEC has been selected as one of the ten students from Paki-
stan, India, Bangladesh and Sri Lanka. We congratulate Onib Nasir on his selection and wish him well.
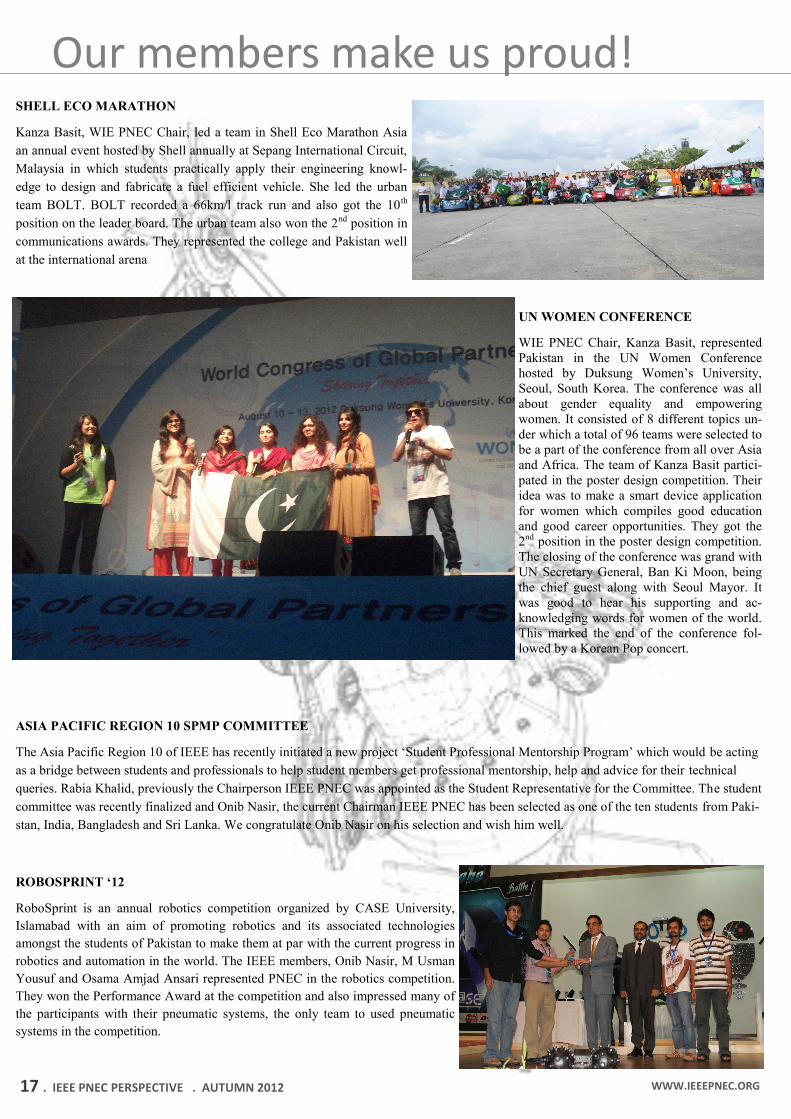
ROBOSPRINT ‘12
RoboSprint is an annual robotics competition organized by CASE University,
Islamabad with an aim of promoting robotics and its associated technologies
amongst the students of Pakistan to make them at par with the current progress in
robotics and automation in the world. The IEEE members, Onib Nasir, M Usman
Yousuf and Osama Amjad Ansari represented PNEC in the robotics competition.
They won the Performance Award at the competition and also impressed many of
the participants with their pneumatic systems, the only team to used pneumatic
systems in the competition.
17 . IEEE PNEC PERSPECTIVE . AUTUMN 2012 WWW.IEEEPNEC.ORG

The IEEE RAS Society strives to advance innovation, education, and fundamental and applied research in Robotics and Automation.
Robotics focuses on systems incorporating sensors and actuators that operate autonomously or semi-autonomously in cooperation with
humans. Robotics research emphasizes intelligence and adaptability to cope with unstructured environments. Automation research em-
phasizes efficiency, productivity, quality, and reliability, focusing on systems that operate autonomously, often in structured environ-
ments over extended periods, and on the explicit structuring of such environments.
The Robotics and Dynamic Systems Lab has recently been setup in PNEC by Dr. Attaullah Memon with the aim of promoting robotics
and its associated technologies amongst the students of PNEC and providing them with a platform to develop and fabricate robotic sys-
tems indigenously. The lab aims to work on research problems and innovative projects that extend the start of the art in robotics. In a
short span of time, RDS Lab has already developed many platforms including the first Segway to be manufactured in Pakistan, indus-
trial robotic welding arm, mecanum wheel based robot and many other projects.
IEEE PNEC STUDENT BRANCH
Pakistan Navy Engineering College
National University of Sciences & Technology
www.ieeepnec.org
Editor in Chief
Editor
Assistant Editor
Creative Director
Production Manager
Syed Onib Nasir
Rehma Javed
Rabia Jamal
Adil Faqah
Asim Ahmed