range validation test - university of california, san diego · 2014-09-03 · system (mini-harp) ....
TRANSCRIPT
DRAFT
DRAFT
Office of Naval Research
Passive Autonomous Acoustic Monitoring of Marine Mammals
Dr. Michael Weise ONR Program Manager
Marine Mammals & Biological Oceanography (Code 322)
SOAR Range Validation Test: Autonomous Buoyancy-Driven Gliders, Autonomous Surface Vehicles, and
Autonomous Profiling Floats
3-9 January, 2011
Neil M. Bogue Applied Physics Laboratory, University of Washington
Gerald D’Spain
Marine Physical Lab, Scripps Institution of Oceanography
David Fratantoni Woods Hole Oceanographic Institution
John Hildebrand
Marine Physical Laboratory, Scripps Institution of Oceanography
Haru Matsumoto Cooperative Institute for Marine Resources Studies, Oregon State University
National Oceanic and Atmospheric Administration
David Moretti Naval Undersea Warfare Center, Newport, RI

DRAFT
DRAFT
Objective The objective of this exercise is to analyze the performance of near-real-time passive acoustic detection, classification, and localization systems integrated onto a set of autonomous platforms, including buoyancy-driven underwater gliders, autonomous surface platforms, and profiling floats, to monitor marine mammal calling activity. The performance analysis will be based on inter-comparisons of the outputs of the various autonomous platform systems and on comparison with the detections made on the SOAR range hydrophones. The results of this test will be used to evaluate the readiness of the participating technologies for a fleet demonstration test.
Background
In April 2005, D. Moretti, N. DiMarzio, and others from NUWC Newport demonstrated the ability to detect and localize the vocalizations of Blainville's beaked whales (Mesoplodon densirostris) on the AUTEC fixed hydrophone range [Moretti, 2006]. Detections were verified by visual observations. This ability has been demonstrated many times since ([DiMarzio, 2008; Ward, 2008]), and has been extended to other odontocetes [Morrissey, 2006], to other marine mammal species, and to other Navy ranges. In 2007, ONR started the Passive Acoustic Autonomous Monitoring (PAAM) of Marine Mammals program to develop near-real-time monitoring systems on autonomous underwater vehicles. The program is focused on passive acoustic systems for autonomous detection, classification, localization, and tracking of marine mammals on Navy exercise areas for periods of nine weeks. This exercise will use the transient waveform detection and localization capabilities of the SOAR range hydrophones developed by Dave Moretti and others as the ground-truth for verification of the near-real-time results from the autonomous ocean platforms. Six types of PAAM systems will be evaluated in this test, including three types of buoyancy-driven underwater gliders, an autonomous surface platform, and two types of freely drifting profiling floats. The list of the types of platforms, and the numbers of each are listed below.
1. Buoyancy-Driven Underwater Gliders: • (1) Marine Physical Laboratory, Scripps Institution of Oceanography
(MPL/SIO) and Applied Physics Laboratory, University of Washington (APL/UW) flying wing underwater glider, ZRay, equipped with three types of passive acoustic monitoring systems: 1) a 27-element hydrophone array all along the leading edge of the glider wing whose outputs are connected to a real-time detection/localization and recording system, 2) a WHOI 2-channel (LF and MF) DMON detection/classification and recording system, and 3) a

DRAFT
DRAFT
single, very-wide-band hydrophone, detection/classification, and recording system (mini-HARP).
• (2) APL/ UW Seagliders, an underwater glider equipped with a single omni-directional hydrophone and internal recorder-detector electronics designed for beaked whales.
• (1) Webb Research Slocum glider operated by Woods Hole Oceanographic Institution (WHOI) equipped with a 2-channel (LF and MF) WHOI-developed Digital MONitoring (DMON) detection/classification and recording system.
2. Autonomous Surface Platform: • (2) Liquid Robotics Wavegliders equipped with a single 100-kHz wide
hydrophone (“HARP”) and odontocete detector-classifier system. 3. Freely-Drifting Profiling Floats:
• (2) Cooperative Institute for Marine Resources Studies-Oregon State University (CIMRS/OSU) QUEphones, an APEX float equipped with a single omni-directional hydrophone and internal recorder-detector electronics.
• (2) WHOI profiling floats equipped with a 2-chan (LF and MF) DMON detection/classification system.
Details on these systems are given in the Instrumentation section below. List of Acronyms APL/UW- Applied Physics Laboratory, University of Washington AUTEC – Atlantic Undersea Test and Evaluation Center CIMRS/OSU) - Cooperative Institute for Marine Resources Studies, Oregon State University DMON – Digital Monitor autonomous detection classification system from WHOI HARP – High (actually wide) Frequency Acoustic Recording Package MPL/SIO – Marine Physical Laboratory, Scripps Institution of Oceanography NOAA – National Oceanographic and Atmospheric Administration NASNI – Naval Air Station North Island NUWC – Naval Undersea Warfare Center PAAM – Passive Autonomous Acoustic Monitoring program ROC – Range Operations Center at North Island SOAR – Southern California Anti-Submarine Warfare Range SCORE – Southern California Offshore Range SPAWAR SSC Pacific – Space and Naval Warfare Systems Center Pacific WHOI – Woods Hole Oceanographic Institution

DRAFT
DRAFT
Schedule, 2010-2011 Range Validation Test
Date Activity Notes Fri, 17 DEC APL/UW Seagliders and gear
arrive Marine Physical Lab, Pt. Loma for check-out. Load AUV van and LARS on R/V Sproul. WHOI shipment
Shipping address: Gerald D’Spain Marine Physical Lab, Bldg 4 291 Rosecrans St. San Diego, CA 92106.
Weeks of 20 DEC & 27 DEC
WHOI and NOAA/OSU instrumentation arrives at MPL Pt. Loma. Load ZRay.
Please provide tracking info so equipment can be rec’d and stored in Bldg. 4.
Sat, 1 JAN Evaluate SoCal weather forecast.
Coordinate with team through email.
Sun, 2 JAN Dave F. and Haru M. arrive at MPL Bldg 4 for checkout.
Please provide approx. arrival times.
Mon, 3 JAN Finish loading Sproul, including SCORE range radios and pod. Depart 7-8 pm PST for SCORE. NUWC arrives at ROC.
Follow Sproul loading and space allocation plan. Personnel on board 1 hour prior to departure.
Tue, 4 JAN Arrive at 1st light on SCORE. Establish contact with ROC. Check out & deploy gliders. Check out & deploy floats.
Deploy gliders first to measure currents. Seaglider launch procedure 1 hour each. QUEphone ½-hour each.
Wed, 5 JAN Finish equipment deployment. Begin ZRay ops.
Flying wing glider program paying for Sproul time.
Thu-Sat, 6-8 JAN Continue ZRay ops. Monitor all platforms. Recover floats that drift off SOAR range.
Sat, 8 JAN Start recovery of gliders & floats.
Use RHIB, weather permitting.
Sun, 9 JAN Finish recovery & RTP. Stay on range until all equipment on board.
Mon, 10 JAN Offload Sproul. Tue morning contingency.
DRAFT
DRAFT
Personnel
R/V Sproul • Gerald D’Spain (MPL/SIO) - chief scientist, ZRay ops, • John Hildebrand (MPL/SIO) – co-chief scientist, Waveglider ops, • 2 MPL/SIO people for Waveglider ops, • Wayne Husband or Mark Stevenson (SPAWAR SSC Pac), Waveglider ops, • Neil Bogue (APL/UW), Seaglider ops, • Trina Litchendorf (APL/UW), Seaglider ops, • Dave Fratantoni (WHOI), Slocum glider ops, profiling float ops, • Pete Brodsky (APL/UW), ZRay ops, Seaglider ops, • Dennis Rimington (MPL/SIO), ZRay ops, • Dave Price (MPL/SIO), ZRay ops, • Resident Technician (SIO), help with all operations.
Range Operations Center (ROC) at NAS/NI • Dave Moretti (NUWC), 2-9 JAN, • 1 data analyst, Elena McCarthy (NUWC), 2-9 JAN.
Shore Support at MPL/SIO • Haru Matsumoto (NOAA/OSU), at MPL/SIO 2-3 JAN, • Richard Zimmerman (MPL/SIO), • Scott Jenkins (MPL/SIO), • Tyler Helble (MPL/SIO, SPAWAR SSC Pacific), • Mariah Lovejoy (MPL/SIO).
DRAFT
DRAFT
Instrumentation
The following equipment is planned for deployment on this test.
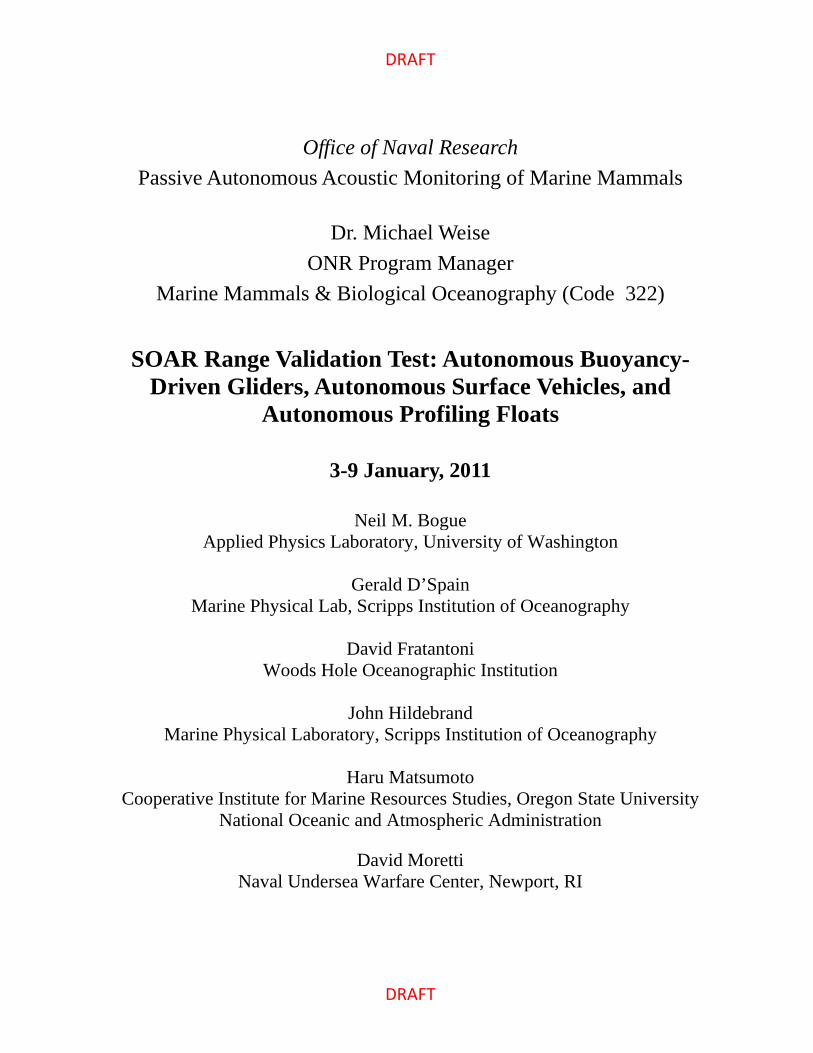
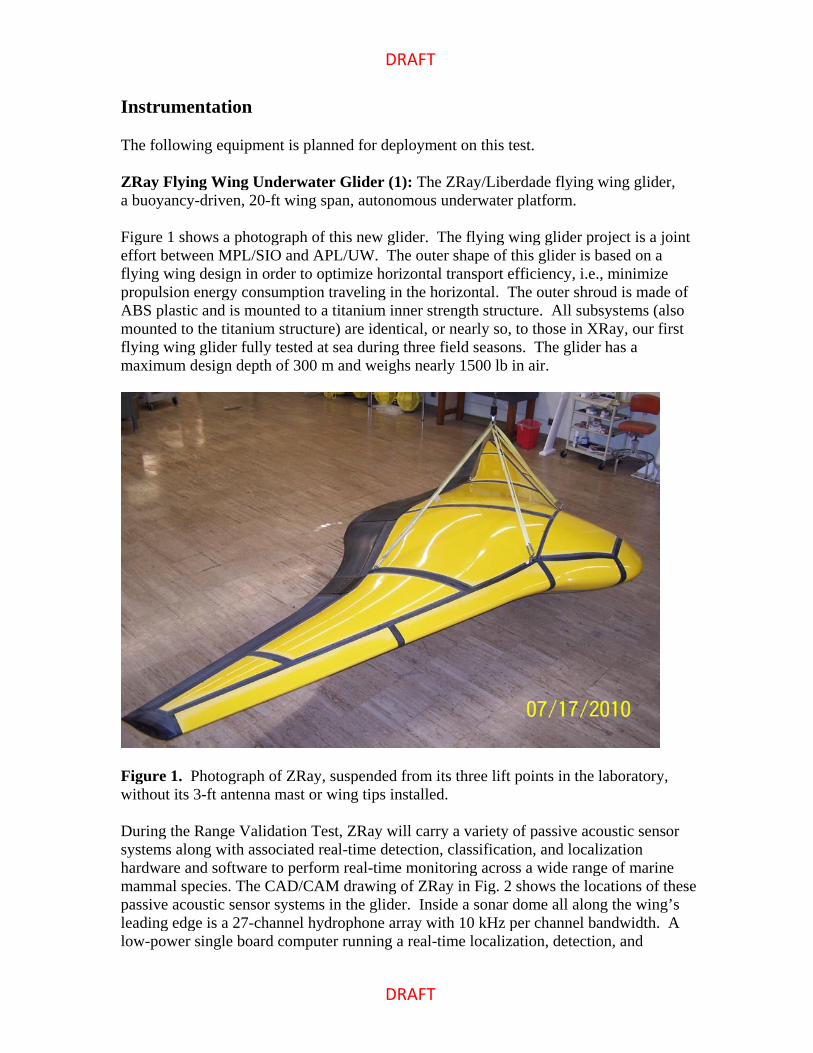
ZRay Flying Wing Underwater Glider (1): The ZRay/Liberdade flying wing glider, a buoyancy-driven, 20-ft wing span, autonomous underwater platform. Figure 1 shows a photograph of this new glider. The flying wing glider project is a joint effort between MPL/SIO and APL/UW. The outer shape of this glider is based on a flying wing design in order to optimize horizontal transport efficiency, i.e., minimize propulsion energy consumption traveling in the horizontal. The outer shroud is made of ABS plastic and is mounted to a titanium inner strength structure. All subsystems (also mounted to the titanium structure) are identical, or nearly so, to those in XRay, our first flying wing glider fully tested at sea during three field seasons. The glider has a maximum design depth of 300 m and weighs nearly 1500 lb in air.
Figure 1. Photograph of ZRay, suspended from its three lift points in the laboratory, without its 3-ft antenna mast or wing tips installed. During the Range Validation Test, ZRay will carry a variety of passive acoustic sensor systems along with associated real-time detection, classification, and localization hardware and software to perform real-time monitoring across a wide range of marine mammal species. The CAD/CAM drawing of ZRay in Fig. 2 shows the locations of these passive acoustic sensor systems in the glider. Inside a sonar dome all along the wing’s leading edge is a 27-channel hydrophone array with 10 kHz per channel bandwidth. A low-power single board computer running a real-time localization, detection, and

DRAFT
DRAFT
classification algorithm string designed for humpback whales has been connected to the output from this hydrophone array. A self-contained mini-HARP system, with a single, extremely wide band (10 Hz to 100 kHz) hydrophone and associated real-time processing designed for odontocete detection and classification, is being installed in Zray. In addition, a 2-channel (low and mid-frequency) Digital Monitoring (DMON) system with integrated detection/classification software has been acquired from Woods Hole Oceanographic Institution and has been integrated in a stand-alone mode in the nose of the wing.
Figure 2. CAD/CAM drawing of ZRay with the starboard hatch covers removed and with labels illustrating the locations of the glider’s real-time passive acoustic monitoring systems. The pre-launch sequence for ZRay requires about an hour. The glider’s launch-and-recovery system, installed on the fantail of the R/V Sproul, allows the glider to be deployed and retrieved without the use of a small boat. Over a hundred launch-and-recovery sequences have been performed in sea states up to sea state 5 without incident.
DRAFT
DRAFT
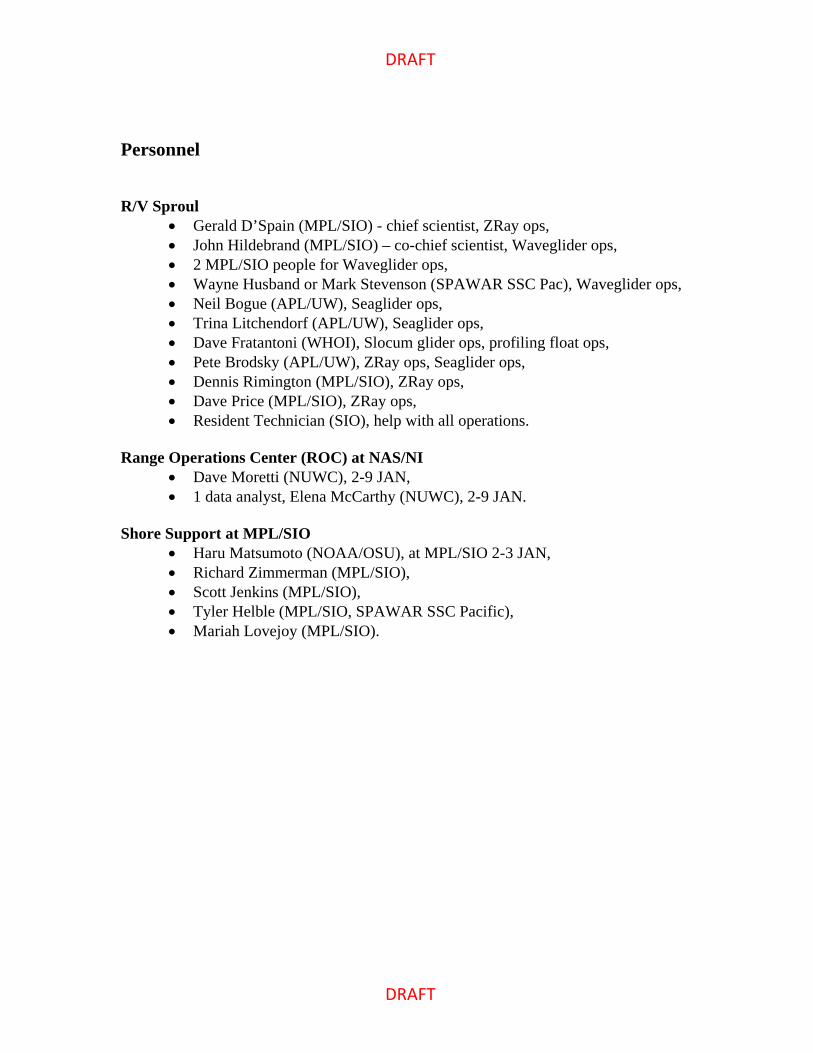
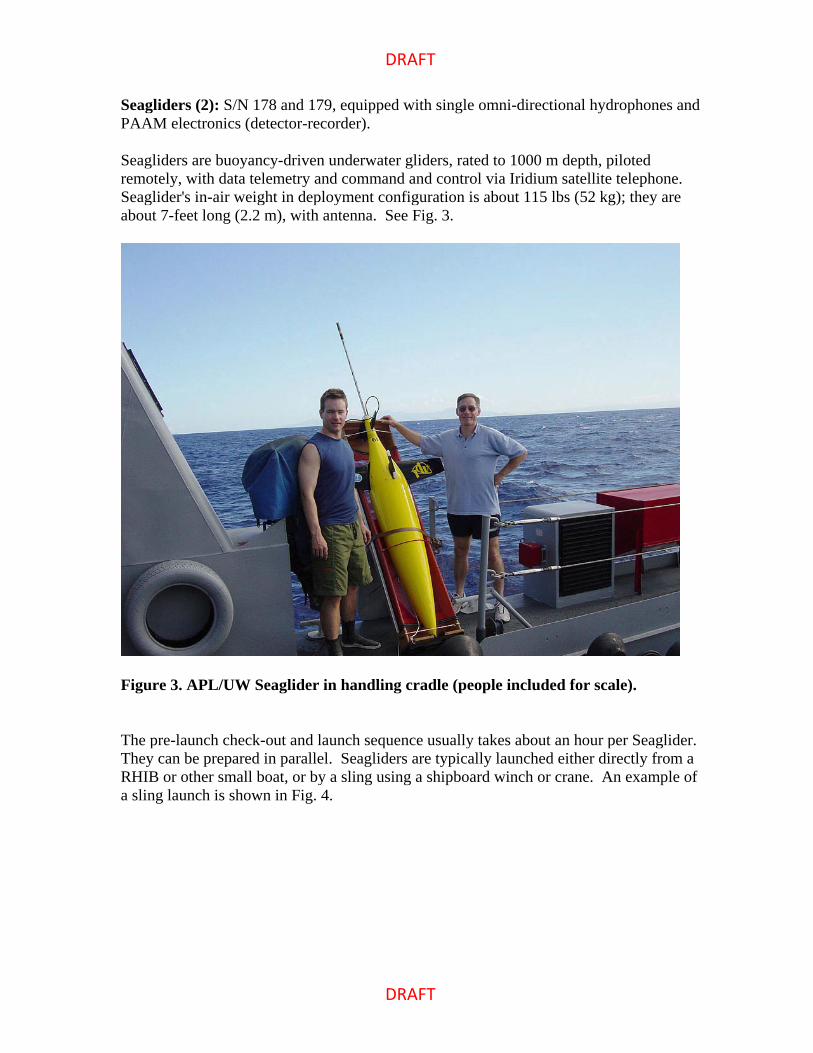
Seagliders (2): S/N 178 and 179, equipped with single omni-directional hydrophones and PAAM electronics (detector-recorder).
Seagliders are buoyancy-driven underwater gliders, rated to 1000 m depth, piloted remotely, with data telemetry and command and control via Iridium satellite telephone. Seaglider's in-air weight in deployment configuration is about 115 lbs (52 kg); they are about 7-feet long (2.2 m), with antenna. See Fig. 3.
Figure 3. APL/UW Seaglider in handling cradle (people included for scale).
The pre-launch check-out and launch sequence usually takes about an hour per Seaglider. They can be prepared in parallel. Seagliders are typically launched either directly from a RHIB or other small boat, or by a sling using a shipboard winch or crane. An example of a sling launch is shown in Fig. 4.

DRAFT
DRAFT
Figure 4. Seaglider sling launch from crane off R/V MELVILLE. Seagliders are recovered either directly into a RHIB or other small boat, or by bridle (or lasso) using a crane or winch from the deck of a larger vessel. A bridle recovery from a TAGS-60 class ship is shown in Fig. 5.

DRAFT
DRAFT
Figure 5. Seaglider recovery using bridle off TAGS-60 class vessel.
The Seagliders will be piloted from a command center at APL/UW in Seattle. Only one Seaglider technician, with help from the ship’s Resident Technician and others on board, is required for check-out, deployment, and recovery.
DRAFT
DRAFT
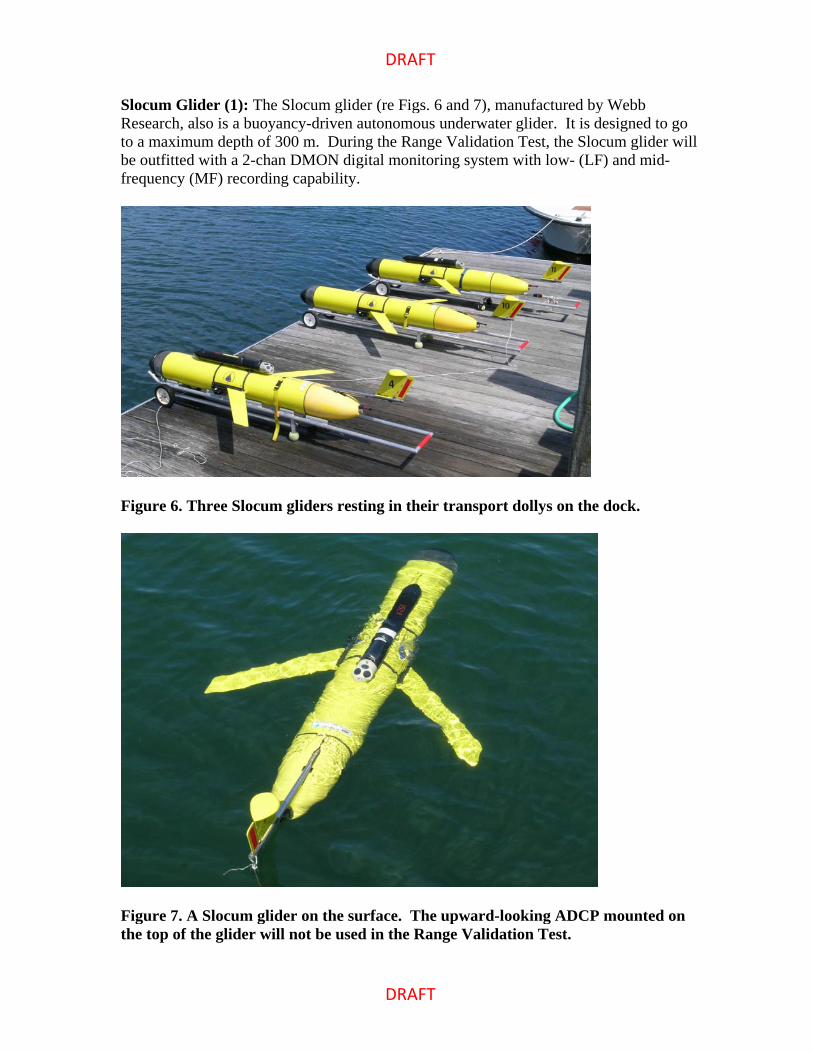
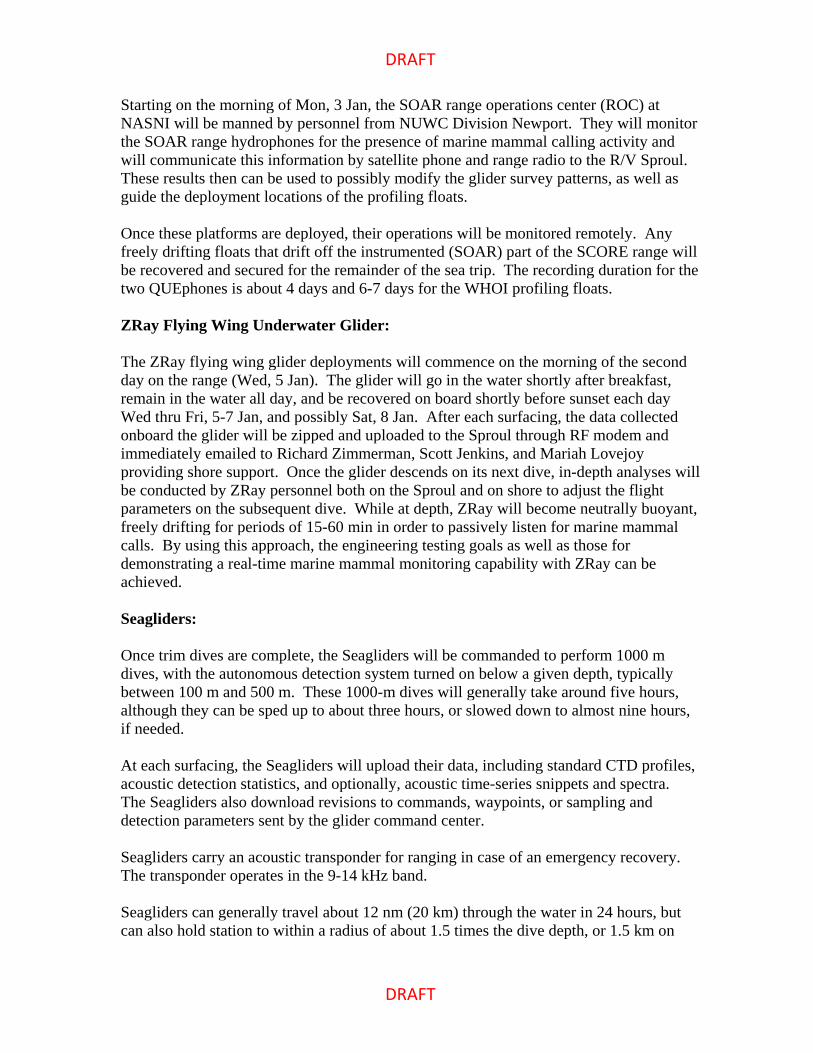
Slocum Glider (1): The Slocum glider (re Figs. 6 and 7), manufactured by Webb Research, also is a buoyancy-driven autonomous underwater glider. It is designed to go to a maximum depth of 300 m. During the Range Validation Test, the Slocum glider will be outfitted with a 2-chan DMON digital monitoring system with low- (LF) and mid-frequency (MF) recording capability.
Figure 6. Three Slocum gliders resting in their transport dollys on the dock.
Figure 7. A Slocum glider on the surface. The upward-looking ADCP mounted on the top of the glider will not be used in the Range Validation Test.

DRAFT
DRAFT
Wavegliders (2): The Waveglider, an autonomous surface vehicle (ASV) manufactured by Liquid Robotics.
The Waveglider propels itself forward using the differential wave motion of a float at the ocean surface and a glider at depth. The operation of this USV is described in Fig. 8 below.
Figure 8. Description of the Waveglider commercialized by Liquid Robotics.
As shown in the left-hand plot of Fig. 8, water particles move in approximately circular orbits of decreasing diameter as depth increases. The float pulls the glider upward with a rising wave crest, but the water around the glider remains relatively stationary. This action provides the necessary energy for forward propulsion of the glider/float assembly.
The basic Waveglider components are labeled and described in the right-hand plot in Fig. 8. Massive components are positioned in the submerged glider where they are protected from the winds and sea surface action. The surface float is light, low drag, and rugged. The tether connecting the glider and surface float typically is 5-15 m in length.
During the Range Validation Test, each of two Wavegliders will be equipped with a single hydrophone towed behind the glider along with a data acquisition system. One ASV also will contain a mini-HARP real-time odontocete detection/classification unit.
The communication systems attached to its surface float allow it to be operated continuously under human control.

DRAFT
DRAFT
QUEphones (2): QUEphones are specially modified APEX profiling floats, equipped with single omni-directional hydrophone and internal recorder-detector electronics. They are designed to be neutrally-buoyant at a specified depth (density surface), park there for a specified time, then profile during the ascent to the surface for data telemetry. A QUEphone is shown in Fig. 9.
Figure 9. QUEphone (on acoustic test barge) lifted by a bridle attached to the collar. QUEphones are typically deployed by sling or slip-line from the deck of a ship. The in-air weight is about 125 lbs (56kg) and they are about 5 feet (1.5m) tall. They are recovered via RHIB or other small boat, or if it is extremely calm, by use of a recovery bridle or lasso from the deck of a shallow draft vessel. Figure 10 shows a QUEphone in the water.

DRAFT
DRAFT
Figure 10. QUEphone diving in water (L) and at surface (R). The pictures show the antenna, omnidirectional hydrophone (on top), and lifting bridle.

DRAFT
DRAFT
WHOI Profiling Floats (2): The WHOI profiling floats, shown in Fig. 11 below. The operation of the profiling floats from WHOI is similar to that of the QUEphone floats. These two WHOI floats will profile to 800 m and remain at that depth for about 6 hours, and then profile back to the surface. This pattern will be repeated, with a surfacing once every 12 hours, throughout the duration of the sea test. The floats will be equipped with the same 2-chan DMON system as used on the Slocum glider.
Figure 11. The WHOI profiling float. Note that the float will not have VCM vanes attached for the Range Validation Test on the SOAR range.

DRAFT
DRAFT
Operations Plan The SOAR operation areas of greatest marine mammal abundance are T2 and T4, at the western and southern parts of the range, respectively. Highlighted in yellow on the map in Fig. 12 is the approximate area coverage of this instrumented part of the range. The R/V Sproul will position itself near the southern edge of the SOAR range by first light on the first morning of the first day. A detailed map showing the recommended glider tracks with respect to the range hydrophone locations is distributed under separate cover.
Figure 12. The outline of the locations of the SOAR range hydrophones (in yellow) west of San Clemente Island. Start of the Exercise: Shortly after first light on first day on the range, the two Seagliders and the Slocum glider will be checked out and deployed. Deployment of the Wavegliders will follow. By deploying the gliders first, they can be used to assess the prevailing ocean currents prior to deployment of the freely drifting profiling floats. The hull-mounted ADCP on the Sproul also will be useful for this purpose. The gliders and Wavegliders will begin their surveys following a track along the western edge of the SOAR range, heading to the northwest (details on the recommended tracks is distributed under separate cover). Just to the southeast of the western extent of the SOAR range, the gliders will turn to the northeast and then to the southeast on the return leg. These recommended survey patterns will continue to be traversed as marine mammal detection results are available from the NUWC personnel at the SOAR Range Operations Center (ROC).
DRAFT
DRAFT
Starting on the morning of Mon, 3 Jan, the SOAR range operations center (ROC) at NASNI will be manned by personnel from NUWC Division Newport. They will monitor the SOAR range hydrophones for the presence of marine mammal calling activity and will communicate this information by satellite phone and range radio to the R/V Sproul. These results then can be used to possibly modify the glider survey patterns, as well as guide the deployment locations of the profiling floats. Once these platforms are deployed, their operations will be monitored remotely. Any freely drifting floats that drift off the instrumented (SOAR) part of the SCORE range will be recovered and secured for the remainder of the sea trip. The recording duration for the two QUEphones is about 4 days and 6-7 days for the WHOI profiling floats. ZRay Flying Wing Underwater Glider: The ZRay flying wing glider deployments will commence on the morning of the second day on the range (Wed, 5 Jan). The glider will go in the water shortly after breakfast, remain in the water all day, and be recovered on board shortly before sunset each day Wed thru Fri, 5-7 Jan, and possibly Sat, 8 Jan. After each surfacing, the data collected onboard the glider will be zipped and uploaded to the Sproul through RF modem and immediately emailed to Richard Zimmerman, Scott Jenkins, and Mariah Lovejoy providing shore support. Once the glider descends on its next dive, in-depth analyses will be conducted by ZRay personnel both on the Sproul and on shore to adjust the flight parameters on the subsequent dive. While at depth, ZRay will become neutrally buoyant, freely drifting for periods of 15-60 min in order to passively listen for marine mammal calls. By using this approach, the engineering testing goals as well as those for demonstrating a real-time marine mammal monitoring capability with ZRay can be achieved. Seagliders: Once trim dives are complete, the Seagliders will be commanded to perform 1000 m dives, with the autonomous detection system turned on below a given depth, typically between 100 m and 500 m. These 1000-m dives will generally take around five hours, although they can be sped up to about three hours, or slowed down to almost nine hours, if needed. At each surfacing, the Seagliders will upload their data, including standard CTD profiles, acoustic detection statistics, and optionally, acoustic time-series snippets and spectra. The Seagliders also download revisions to commands, waypoints, or sampling and detection parameters sent by the glider command center. Seagliders carry an acoustic transponder for ranging in case of an emergency recovery. The transponder operates in the 9-14 kHz band. Seagliders can generally travel about 12 nm (20 km) through the water in 24 hours, but can also hold station to within a radius of about 1.5 times the dive depth, or 1.5 km on

DRAFT
DRAFT
1000-m dives. Seaglider can stem depth-averaged currents of up to 40 cm/sec (0.8 kts). Such currents are unlikely on the range (re Environmental Conditions below), assuming 1000-m dives, so the gliders should not have problems maintaining track and station control. Upon recovery, the Seagliders are commanded to stay at the surface and report their position at regular intervals. QUEphone Profiling Floats: Since the QUEphones are passive, they drift with the prevailing ocean current at their neutrally-buoyant depth. The ocean currents will be determined prior to deployment, as described at the beginning of this section. This determination will be critical to picking the launch position in order to keep the QUEphones within the assigned water-space. Previous measurements on the SCORE range (re Environmental Conditions) suggest that the general direction of the current will be to the north and northwest. Therefore, the initial plan is to deploy the two QUEphones at the southern end of the SOAR range area. The instrument’s neutrally-buoyant depth will be set to about 1000 m. They will stay at this depth for about 16 hours/day and drift with the current. Each QUEphone will be programmed to surface once a day at a specific time, one at about 0900 and the other at about 1500 (local time). Each will report the status to the NOAA-Pacific Marine Environmental Laboratory Iridium Rudics web site. Access to that web site should be available from the Sproul. Their progress will be monitored 24/7 through this web site. The ocean currents will be monitored throughout the exercise, and the QUEphones, and PAAM instrumentation in general, will be repositioned or recovered if necessary. Note that if the current at the neutrally-buoyant depth is 10 cm/sec, a QUEphone drifts 35 km in 4 days. SOAR Range Operations Center at NASNI: NUWC personnel in the ROC will continue to operate the M3R system and report marine mammal calling activity until the Sproul begins platform recovery on Sat afternoon, 8 Jan. M3R data recording in the ROC will continue until the Sproul returns to port at the end of the day on Sun, 9 Jan. Certain periods of time may be selected for recording of the raw range hydrophone outputs. The SOAR range operations center does NOT control the water space on the north, south, west, or east of the SOAR range. Rather, all water space outside SOAR below a depth of 90 ft (30 m) is managed by SUBPAC (SUBPAC does not manage the water space within 90 ft of the surface). Therefore, either:
a) gliders and profilers at depths in excess of 90 ft must be retrieved if they move off range,
b) permission must be obtained from SUBPAC beforehand, or c) gliders and profilers that move off the SOAR range must be programmed to stay
within 90 ft of the surface. In cases b) or c), longer ship transits to recovery would be required at the end of the test.
DRAFT
DRAFT
Environmental Conditions at SOAR
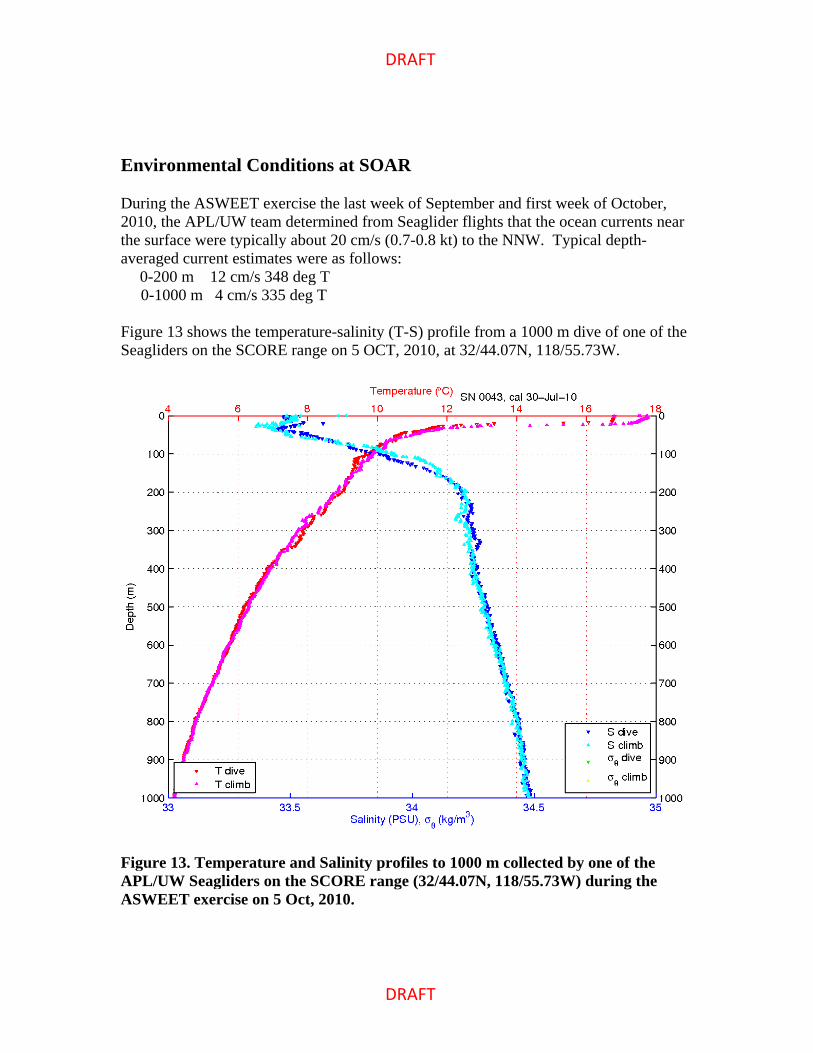
During the ASWEET exercise the last week of September and first week of October, 2010, the APL/UW team determined from Seaglider flights that the ocean currents near the surface were typically about 20 cm/s (0.7-0.8 kt) to the NNW. Typical depth-averaged current estimates were as follows:
0-200 m 12 cm/s 348 deg T 0-1000 m 4 cm/s 335 deg T Figure 13 shows the temperature-salinity (T-S) profile from a 1000 m dive of one of the Seagliders on the SCORE range on 5 OCT, 2010, at 32/44.07N, 118/55.73W.
Figure 13. Temperature and Salinity profiles to 1000 m collected by one of the APL/UW Seagliders on the SCORE range (32/44.07N, 118/55.73W) during the ASWEET exercise on 5 Oct, 2010.

DRAFT
DRAFT
For comparison, Fig. 14 shows a T-S profile from a 200 m dive by the same Seaglider in a Southern California deployment, on 17 NOV, 2007, at 32/45.97N, 117/46.83W. Although this location is east of San Clemente Island, it is closer in time to the time period of the Range Validation Test.
Figure 14. A T-S profile to 200 m collected by the same Seaglider as in Fig. 13. These data were collected on 17 Nov, 2007, to the east of San Clemente Island, at 32/45.97N, 117/46.83W.
Communications during the Test
Ship-to-SOAR Operations: The SOAR range operations people would prefer to communicate, in descending order of priority, via:
1. Satellite phone (ROC main line: 619-313-2200) 2. Nextel cell phones (Nextel cell phone tower on San Clemente Island) 3. channel 82A VHF marine band radio
The R/V Sproul also will be equipped with range radios.
DRAFT
DRAFT
The main phone number for the SOAR range at the Range Operations Center at Naval Air Station, North Island is 619-313-2200.
The SOAR range has no requirement for range transponders or range radios. However, Dave Moretti has arranged for the R/V Sproul to be equipped with range radios and a range tracking pod – installation on Mon, 3 Jan.
Navigation Requirements for Off-Board Platforms during the Test
The SOAR range operations center does NOT control the water space on the north, south, west, or east of the SOAR range. Rather, all water space outside SOAR below a depth of 90 ft (30 m) is managed by SUBPAC (SUBPAC does not manage the water space within 90 ft of the surface). Therefore, either:
a) gliders and profilers at depths in excess of 90 ft must be retrieved if they move off range,
b) permission must be obtained from SUBPAC beforehand, or c) gliders and profilers that move off the SOAR range must be programmed to stay
within 90 ft of the surface. The SOAR range does NOT require tracking pingers on the platforms for sub-surface tracking on the range.
Technical and Logistic Support Requests
1. Request from SUBPAC for instrumentation off the SOAR range to be below 90 ft during the 4-10 Jan period.
2. Submit Notice to Mariners and notification to other local Navy activities. 3. Phone numbers for NUWC personnel in the ROC and the satellite phone on R/V
Sproul. 4. Vessel capable of emergency recovery or repositioning, if needed (e.g., Vessel
Assist). 5. SOAR range fixed hydrophone transient detection and localization data, including
start and stop times of detections on each hydrophone for period of 3-9 Jan. 6. Visits to the SOAR ROC during the 3-7 Jan period require a visit request to be on
file. Email the request to Ms. Roxanne Jones ([email protected]) with copy to Robert Tahimic ([email protected]). The required information is:
a. Visitor's full name (Last, First, Middle Initial), b. Company or Organization Name - complete address, phone number, fax
number & CAGE code, c. Visitor's Social Security Number - this information is protected by the Privacy
Act of 1974, d. Visitor's Date of Birth and Place of Birth (city/state),

DRAFT
DRAFT
e. Citizenship, f. Individual's Level of Clearance Access - this information is verified using
JPAS, g. Specific Date(s) of Visit (include the year), h. Technical Point of Contact (POC) - Robert Tahimic 619-545-8527, i. Specific Purpose of Visit (include classification of visit) - M3R monitoring of
beaked whales during glider test: UNCLASS, j. Contract number - for non-governmental activities, k. Name, Title, and Signature of authorizing company official (may NOT be one
of the listed visitors).
Information on Ships
R/V Sproul - http://shipsked.ucsd.edu/Ships/Robert_Gordon_Sproul/ • To be used during deployment leg, and preferably during recovery leg.
Vessel Assist San Diego - http://vesselassistsandiego.com/ • 1-800-391-4869, (619) 235-8273 • P.O. Box 6778 • San Diego, CA 92166
Merlin ($6K/day plus fuel) • Neil had positive experience using it for SCORE range recovery after ASWEET.
The Truth - http://www.truthaquatics.com/the-truth.html • 65-ft dive boat with good davit, • out of Santa Barbara.
Pacific Venture - http://www.pacific-venture.com/ • Capt. Chuck White, charter service out of Oceanside Harbor, • around $2.5K/day - 5-hr trip from Oceanside to SCORE, • Recommended by Todd Pickering at SPAWAR SSD.
SPAWAR SSD San Diego's Steve Whiteside's 11-m RHIBs • $3-4K per day with techs, • day-time use only in/out of Wilson's Cove - SPAWAR Dive locker.
USNS ships • Sioux - in middle of maintenance period, ending 03 Dec, 2010, • Salvor - already committed and won't be in San Diego until around 30 Nov.
DRAFT
DRAFT
Questions and List of Tasks
1. Who will develop a loading plan and space allocation for R/V Sproul? 2. What is required to get SUBPAC permission for equipment to be off the SOAR range
and below 90 ft? 3. Contingency plan for equipment recovery at end of test in case the weather is rough. 4. How will information from the M3R at the ROC get distributed to all shipboard
participants and to glider command centers (satellite phone call from ROC to one shipboard participant may not be sufficient)?
References
[DiMarzio, 2008] DiMarzio, N., Moretti, D., Ward, J., Morrissey, R., Jarvis, S., Izzi, A. M., Johnson, M., Tyack, P., Hansen, A., “Passive acoustic measurement of dive vocal behavior and group size of Blainville's beaked whale (Mesoplodon densirostris) in the Tongue of the Ocean (TOTO)”, Canadian Acoustics, 36(1), pp166-171, 2008. [Moretti, 2006] Moretti, D., DiMarzio, N., Morrissey, R., and Jarvis, S., “Estimating the density of Blainville's beaked whale (Mesoplodon densirostris) in the Tongue of the Ocean (TOTO) using passive acoustics,” Proc. MTS/IEEE OCEANS Boston, 2006. [Morrissey, 2006] Morrissey, R. P., Ward, J., DiMarzio, N., Jarvis, S., Moretti, D.J., “Passive acoustic detection and localization of sperm whales (Physeter macrocephalus) in the Tongue of the Ocean”, Applied Acoustics, 67, pp1091-1105, 2006. [SCORE, 2007] “Southern California Offshore Range (SCORE) Development History (1981-2007),” 26 pgs. [Ward, 2008] Ward, J., Morrissey, R., Moretti, D., DiMarzio, N., Jarvis, S., Johnson, M., Tyack, P., and White, C., “Passive acoustic detection and localization of Mesoplodon densirostris (Blainville’s beaked whale) vocalizations using distributed bottom-mounted hydrophones in conjunction with a Digital Tag (DTag) recording,” Canadian Acoustics, 36(1), pp60-66, 2008.
Contact Information
“Neil M. Bogue” <[email protected]> 206-221-7687 (wk), 206-409-7061 (cell) “Gerald D’Spain” [email protected] 858-534-5517 (wk), 858-534-5255 (fax) Marine Physical Laboratory 291 Rosecrans St. San Diego, CA 92106
DRAFT
DRAFT
“David Fratantoni” <[email protected]> 508-289-2908 (wk), 508-826-8662 (cell), 508-457-2181 (fax) Autonomous Systems Laboratory Department of Physical Oceanography, MS#30 Woods Hole Oceanographic Institution Woods Hole, MA 02543 USA [email protected] | http://asl.whoi.edu “John Hildebrand” [email protected] 858-535-4069 (wk) Marine Physical Laboratory Scripps Institution of Oceanography La Jolla, CA 93940 “Haru Matsumoto” [email protected], [email protected] 541-867-0272 (wk), 541-867-3907 (fax) CIMRS/NOAA, Oregon State Univ. 2115 SE OSU Dr. Newport, OR "Moretti, David J CIV NUWC NWPT" <[email protected]>, [email protected] 401-832-5749 “Weise, Michael” [email protected] 703-696-4533 (wk) Dr. Michael J. Weise Marine Mammals & Biological Oceanography Program (322 MMB) Office of Naval Research - Code 32 One Liberty Center - Rm 1068 875 N. Randolph St. Arlington, VA 22203-1995 703.696.4533 office 703.696.2007 fax [email protected] http://www.onr.navy.mil/en/Science-Technology/Departments/Code-32/All- Programs/Atmosphere-Research-322/Marine-Mammals-Biology.aspx SCORE Range Range Operations Center main number: 619-313-2200 Robert Tahimic, [email protected], 619-545-8527 Heidi Nevitt, [email protected], 619-545-6539 Dorothy (“DJ”) Pascua
DRAFT
DRAFT
APPENDIX 1 - QUEPhone Deployment Manual
Deployment At the site 10 minutes before deployment
Open serial communication program (9600, N, 8, 1) and connect SAIL com. (SAIL needs ext power!)
. Connect the 6-pin Impulse connector. Hit return (this wakes up the QUEphone). Make sure there is no file. Type “e” to execute. Put the dummy plug back.
Move the QUEphone to a place with clear sky view (for Iridium com)
Ready to deploy You have about 30 minutes to deploy. It transmits brief data file twice approximately at 15-min interval, then dive begins. To deploy from the ship, use a polypro line loop to lower it in water.
Recovery
To pick it up, grab by the polypro loop (not by antenna or hydrophone). Preferably to be picked up by RHIB if weather permits. If it is from a low draft boat, a10-ft pole with a hook (with rope on one end) would do. We will ship the telescoping pole with a hook line.
Move the QUEphone where clear view of sky. Open Motocross com software.
Connect the serial cable. Hit return (sometimes it does not respond because it is busy with TX/RX with
Iridium. Let it finish.). Type “k” to kill. Make sure DSP is not ON. i*k to kill the power of DSP. Move the piston to 110 for shipping (ig 110).
Moving the piston to 110 takes time (about 15 min). When the motor stops, type q to quite. This make the float low-power hibernate mode.
Clean with fresh water. Remove the rubber plug on the bottom. Wash well inside cowling. Wash inside the pressure sensor. Dry it for shipping.

DRAFT
DRAFT