robotica industrial basica de soldadura. introduccion. navales/la profesion/repositorio … ·...
TRANSCRIPT

Control de Cuerpos Sumergidos. Aplicación a Dispositivos de
Aprovechamiento de Energía de las Corrientes

Jos é A ndrés Som olinos Sánc h ez
A M A B L E L Ó P E Z P I Ñ E I R O
L U I S R A M Ó N N Ú Ñ E Z R I V A S
M A R I N A P É R E Z D E L A P O R T I L L A
j o s e a n d r e s . s o m o l i n o s @ u p m . e s

1 . ¿ Q U I É N E S S O M O S ?
2 . D E S C R I P C I Ó N G E N E R A L D E L O S D I S P O S I T I V O S
3 . S I S T E M A S D E C O N T R O L
4 . R E S U L T A D O S D E S I M U L A C I Ó N
5 . A L G U N A S C O N C L U S I O N E S
CONTENIDOS

¿QUIÉNES SOMOS?

GIT-ERM UPM Misión Principal: Generar Conocimiento
Energías Renovables Marinas Diseño y concepción de dispositivos Control para optimización de explotación Gestión de la energía Estudio de costos Claramente Disciplinares
Investigación Docencia
Patentes en explotación TFG TFM Artículos indexados Tesis Doctorales Proyectos financiados
1
1.- ¿Quiénes Somos?

Constituido como Grupo 01/2011 Consolidado UPM 09/2014 Obtiene Financiación de:
Proyectos Competitivos Plan Nacional. H2020... Proyectos A.83 Industria
2
1.- ¿Quiénes Somos?

Grupo temático de automática y robótica para la industria marítima y las ciencias marinas CEA
Más de 15 grupos de Investigación
3
1.- ¿Quiénes Somos?
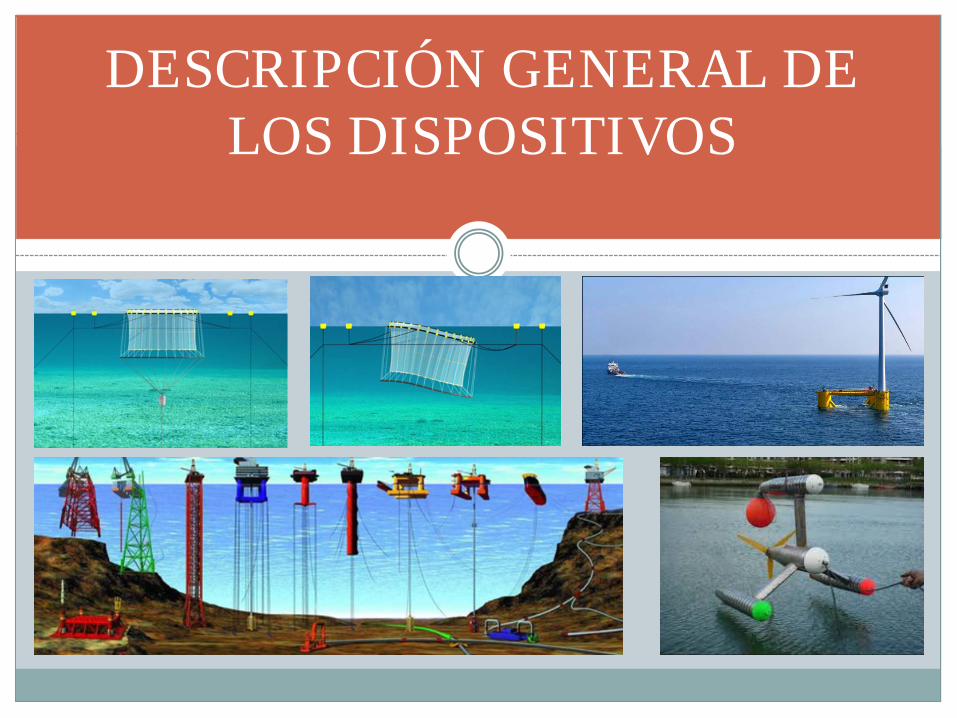
DESCRIPCIÓN GENERAL DE LOS DISPOSITIVOS

2.- Descripción General de los Dispositivos
Control de profundidad y/u orientación de cuerpos sumergidos. Interés en las energías renovables de origen marino Aparición de granjas flotantes para acuicultura Evolución de las plataformas de explotación de gas y petróleo
DAECs de segunda generación Sistema de control basado en tanques de lastre Mejora en los costos de mantenimiento Acceso a recursos energéticos no convencionales Viabilidad técnica y económica
En general: beneficios en prestaciones y nuevos dispositivos
4

5
Dispositivos: DAECs de 1ª generación. DAECs de 2ª generación.
Dispositivos: Mono-Rotor vs Multi-Rotor Un único PTO Mono-Rotor de alta potencia. Múltiples Rotores con PTOs de baja potencia unitaria
2.- Descripción General de los Dispositivos

Ejemplo 1. Primera Generación. 1 grado de libertad
Emersión Automática
6
2.- Descripción General de los Dispositivos

7
Ejemplo 2:Hive-TEC-6FR. 2gdl
Parámetros Potencia Nominal 6x120
(kW) Longitud Torpedos 11.5 (m) Ancho 22.0 (m)
(+Palas) Altura 12.0 (m)
(+Palas) Desplazamiento 204 (t) Peso 100.2 (t) Capacidad Lastre 118 (m3)
2.- Descripción General de los Dispositivos

PTOs
Tanques de Lastre
8
2.- Descripción General de los Dispositivos

SISTEMAS DE CONTROL

9
3.- Sistemas de Control
Modelo dinámico Ejemplo 1. Sólo 1 gdl (z profundidad) Simplificación
Un Torpedo Un Tanque doble
0 10 20 30 40 50 60 70 80 90 100-2
-1.5
-1
-0.5
0
0.5
Time (s)
Dep
th (m
)
z = -0.1 mSimulatedExperimental

3.- Sistemas de Control 10
Modelo dinámico Ejemplo 1.
Dos gdl (z profundidad) (q orientación)
Simplificación Un Torpedo Dos Tanques
Generalizable a dispositivos de 3 gdl (z,q,f)

Ej. 1 (2gdl) IPD adaptado
R.Morales, J.A.Somolinos et al. “Maintenance Maneuvers Automation for an Adapted Cylindrical Shape TEC”. Energies ( ISSN: 1996-1073). Vol. 9. No. 9. September 2016. Pp.746-(1-16)
Ej 2 (2gdl) M.P.Portilla et al. “Modelado
Dinámico y Control de un Dispositivo Sumergido provisto de Actuadores Hidrostáticos”. Revista Iberoamericana de Automática e Informática Industrial. (ISSN: 1697-7912). (2018)
11
3.- Sistemas de Control

RESULTADOS DE SIMULACIÓN

Orcaflex parámetros del entorno: estado de la mar, olas,
corrientes, profundidad y tipo del fondo, etc, parámetros de forma del dispositivo:
dimensiones, materiales, fricciones y masas añadidas, entre otros
parámetros del sistema de fondeo, tipos de cables y tipos de anclaje al fondo marino, principalmente.
12
4.- Resultados de Simulación

Validación por simulación En algunos casos, validación experimental Muy buena correspondencia de resultados
13
4.- Resultados de Simulación

Integración con Matlab Implementación de diversos sistemas de control. Gestión de datos Tratamiento gráfico de respuestas dinámicas Análisis de resultados
14
4.- Resultados de Simulación

15
4.- Resultados de Simulación
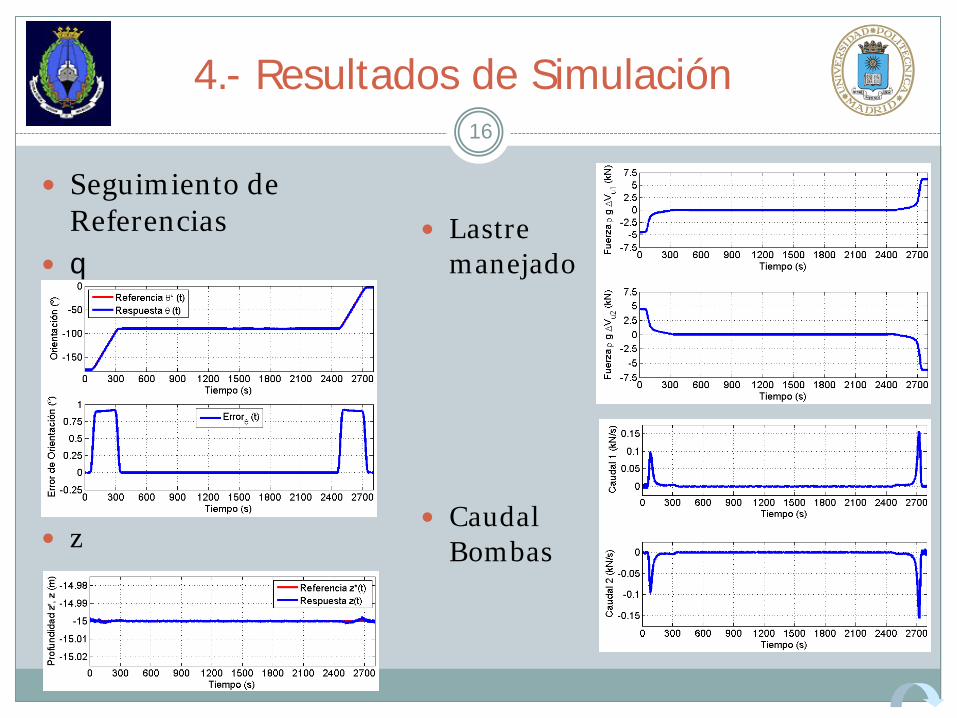
Seguimiento de Referencias
q
z
16
4.- Resultados de Simulación
Lastre
manejado
Caudal Bombas

ALGUNAS CONCLUSIONES

Integración PTOs/ Tanques de Lastre Tanques de Lastre diseñados para control de maniobras Modelo dinámico generalizado Sistemas de control complejos basados en modelo Maniobras para aprovechamiento de recurso Implantación:
Filtrados en línea de señales Sistemas sensoriales de diseño propio Accionamiento de diseño propio Integración Compleja Sensores/Accionamientos (Concepto ASSE)
Herramienta simulación Orcaflex-Matlab Excelentes resultados
17
5.- Algunas Conclusiones

Muchas gracias por su atención