spacecraft attitude control - home | princeton universitystengel/mae342lecture12.pdf · potential...
TRANSCRIPT
Copyright 2016 by Robert Stengel. All rights reserved. For educational use only.http://www.princeton.edu/~stengel/MAE342.html
Spacecraft Attitude Control ! Space System Design, MAE 342, Princeton University!
Robert Stengel
•! More on Rotation Matrices•! Direction cosine matrix •! Quaternions
•! Yo-yo De-Spin•! Continuously Variable Torque Controllers•! On/Off-Torque Controllers
1
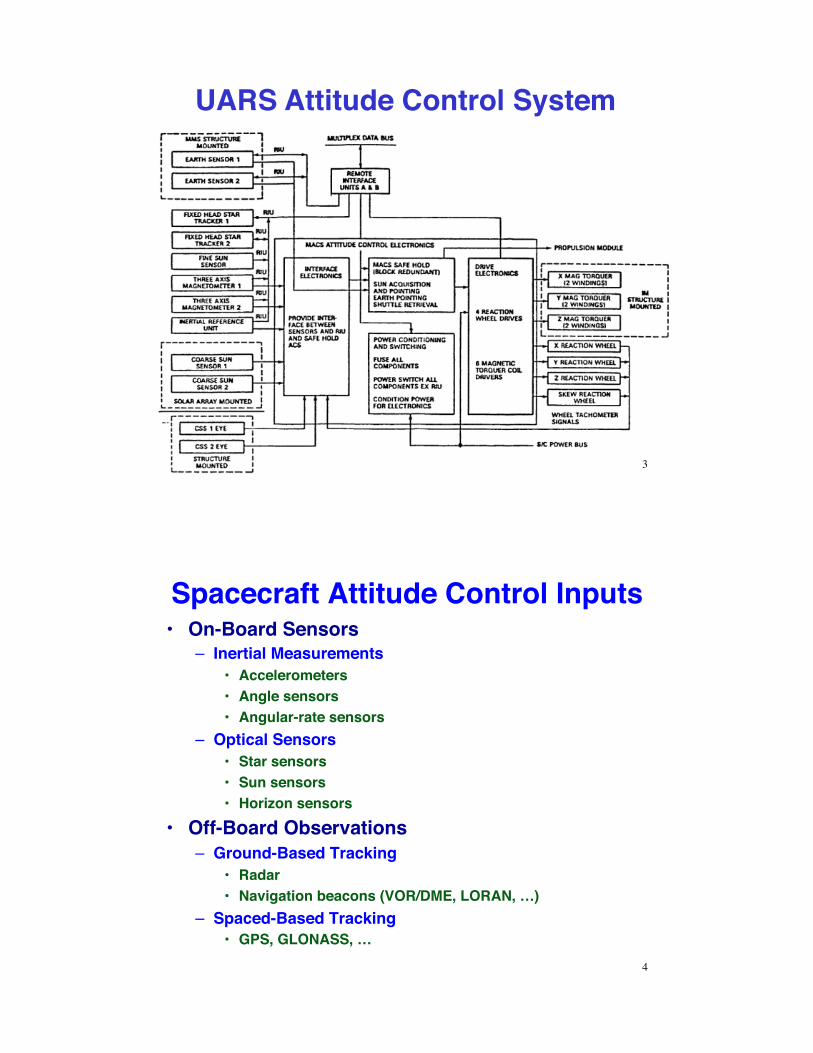
Attitude Control System
2Fortescue
3
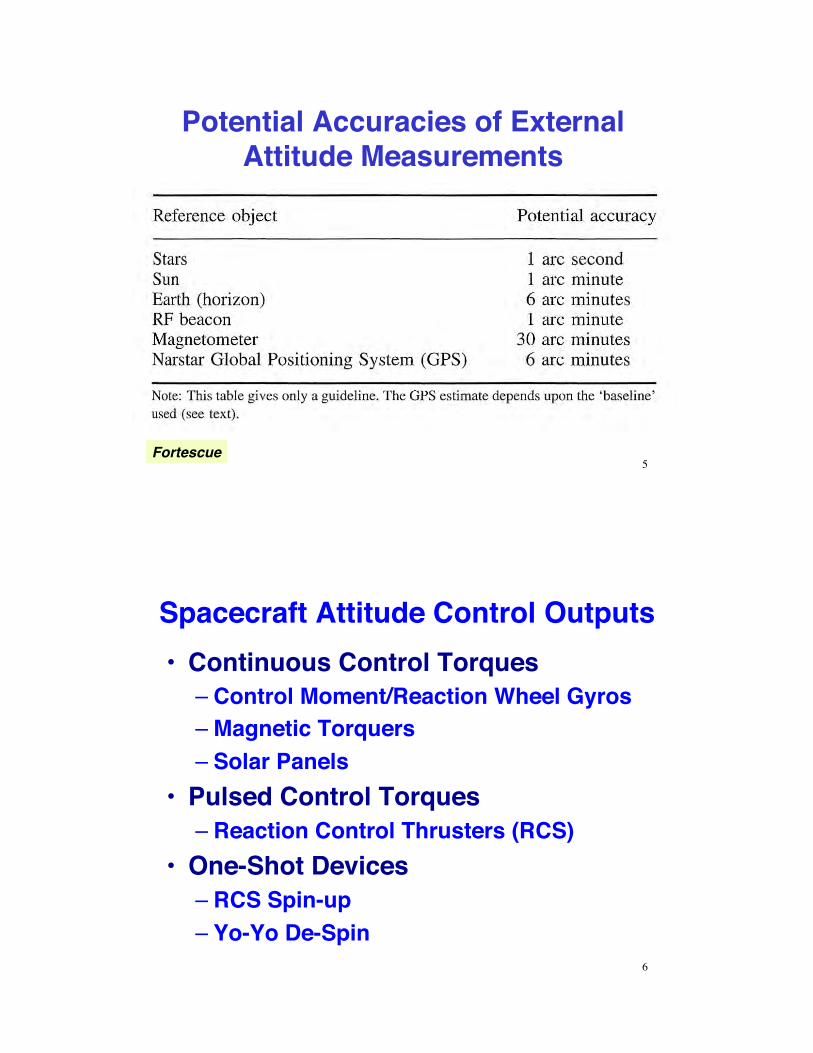
UARS Attitude Control System
Spacecraft Attitude Control Inputs•! On-Board Sensors
–! Inertial Measurements•! Accelerometers•! Angle sensors•! Angular-rate sensors
–! Optical Sensors•! Star sensors•! Sun sensors•! Horizon sensors
•! Off-Board Observations–! Ground-Based Tracking
•! Radar•! Navigation beacons (VOR/DME, LORAN, …)
–! Spaced-Based Tracking•! GPS, GLONASS, …
4
Potential Accuracies of External Attitude Measurements
Fortescue5
Spacecraft Attitude Control Outputs•! Continuous Control Torques
–!Control Moment/Reaction Wheel Gyros–!Magnetic Torquers–!Solar Panels
•! Pulsed Control Torques–!Reaction Control Thrusters (RCS)
•! One-Shot Devices–!RCS Spin-up–!Yo-Yo De-Spin
6
Spacecraft Attitude Disturbances•! External Torques
–! Solar radiation pressure–! Gravity gradient–! Magnetic fields–! Aerodynamics–! Can be put to good use if related to
attitude control objectives•! Vehicle-Based Torques
–! Mass movement–! Elasticity–! Out-gassing
7
More on Rotation Matrices and Quaternions!
8
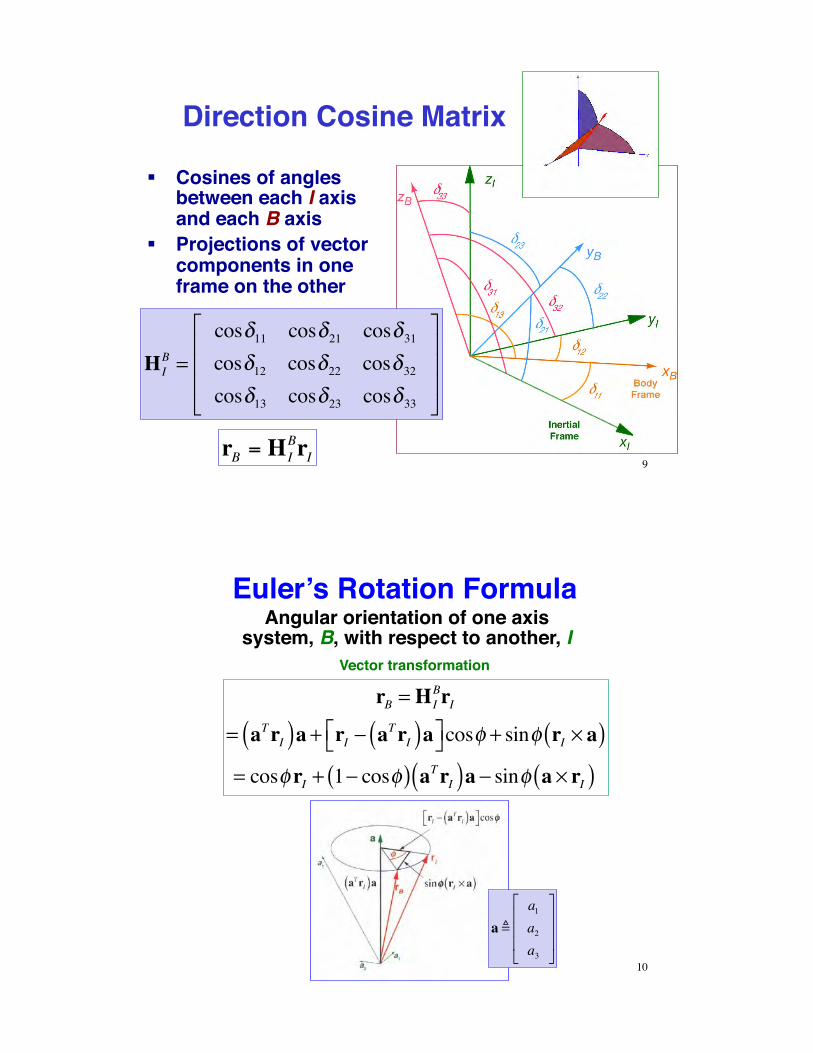
!! Cosines of angles between each I axis and each B axis
!! Projections of vector components in one frame on the other
H IB =
cos!11 cos!21 cos!31cos!12 cos!22 cos!32cos!13 cos!23 cos!33
"
#
$$$
%
&
'''
9
Direction Cosine Matrix
rB = H IBrI
Angular orientation of one axis system, B, with respect to another, I
10
Euler’s Rotation Formula
rB = H IBrI
= aTrI( )a + rI ! aTrI( )a"# $%cos& + sin& rI ' a( )
= cos& rI + 1! cos&( ) aTrI( )a ! sin& a ' rI( )
Vector transformation
a !a1a2a3
!
"
###
$
%
&&&
11
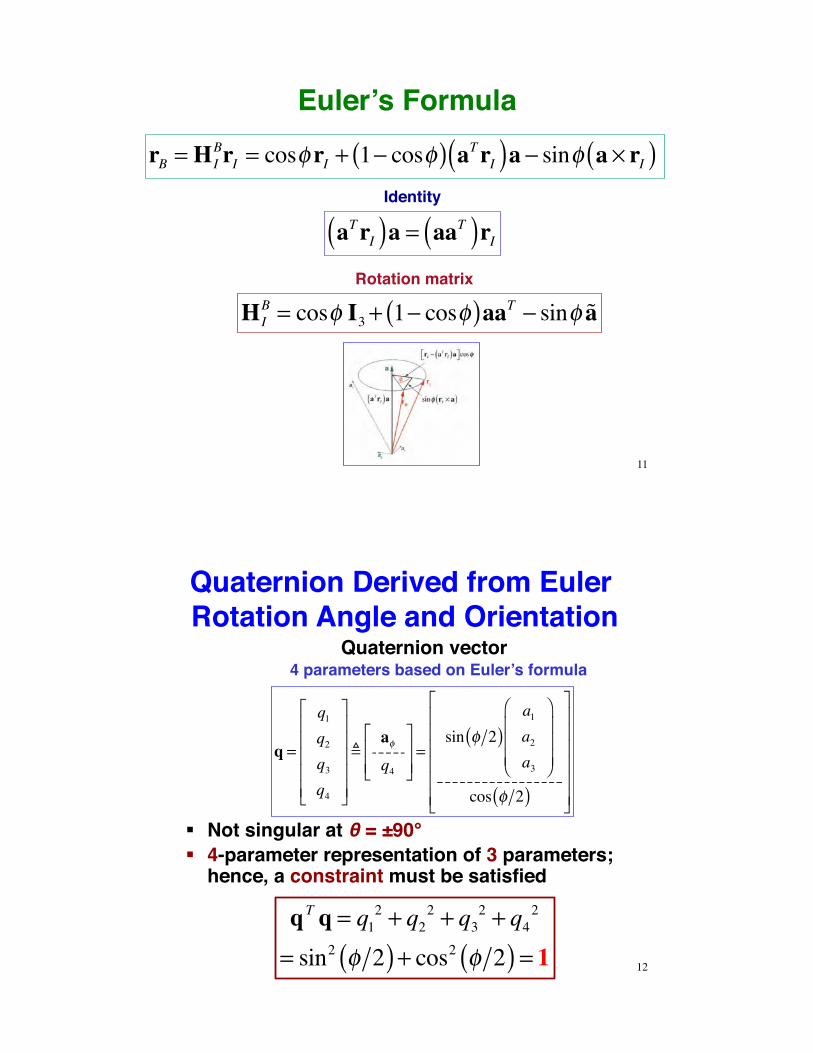
Euler’s FormularB = H I
BrI = cos! rI + 1" cos!( ) aTrI( )a " sin! a # rI( )
aTrI( )a = aaT( )rI
H IB = cos! I3 + 1" cos!( )aaT " sin! !a
Identity
Rotation matrix
Quaternion Derived from Euler Rotation Angle and Orientation
q =
q1q2q3q4
!
"
#####
$
%
&&&&&
!a'q4
!
"##
$
%&&=
sin ' 2( )a1a2a3
(
)
***
+
,
---
cos ' 2( )
!
"
######
$
%
&&&&&&
!! Not singular at ! = ±90°!! 4-parameter representation of 3 parameters;
hence, a constraint must be satisfied
12
qT q = q12 + q2
2 + q32 + q4
2
= sin2 ! 2( ) + cos2 ! 2( ) = 1
Quaternion vector4 parameters based on Euler’s formula
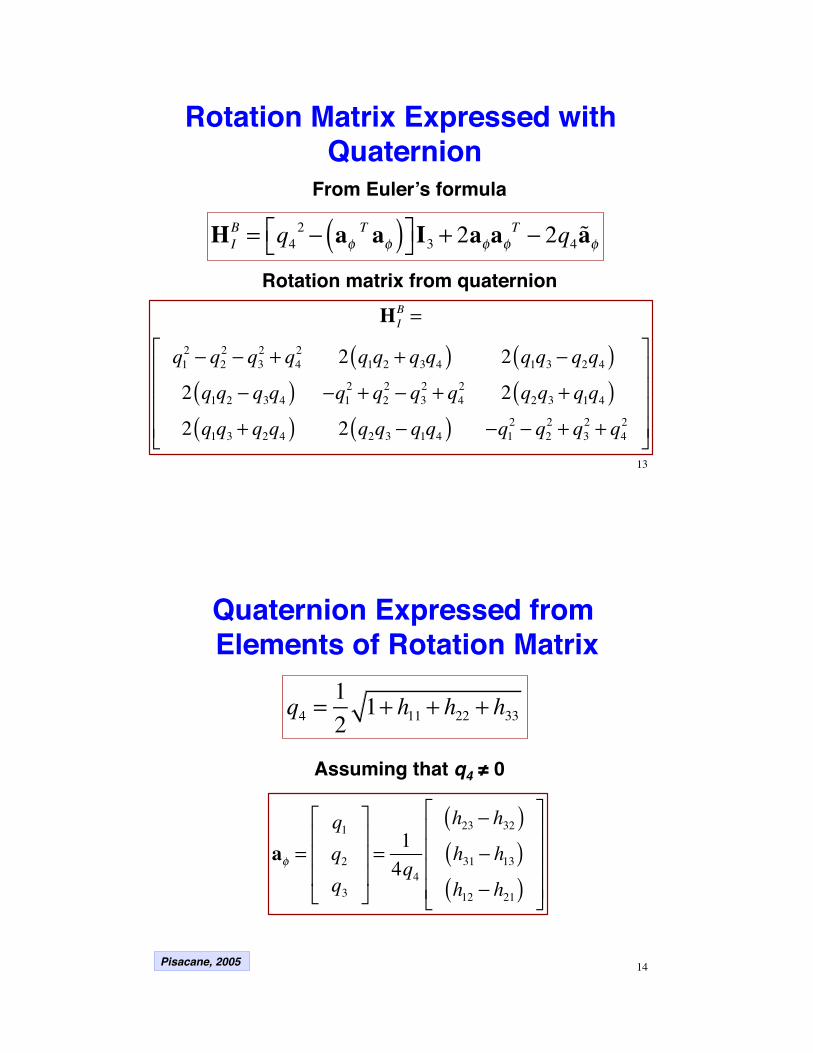
Rotation Matrix Expressed with Quaternion
13
H I
B = q42 ! a"
T a"( )#$ %&I3 + 2a"a"T ! 2q4 !a"
H IB =
q12 ! q2
2 ! q32 + q4
2 2 q1q2 + q3q4( ) 2 q1q3 ! q2q4( )2 q1q2 ! q3q4( ) !q1
2 + q22 ! q3
2 + q42 2 q2q3 + q1q4( )
2 q1q3 + q2q4( ) 2 q2q3 ! q1q4( ) !q12 ! q2
2 + q32 + q4
2
"
#
$$$$
%
&
''''
From Euler’s formula
Rotation matrix from quaternion
Quaternion Expressed from Elements of Rotation Matrix
14
q4 =121+ h11 + h22 + h33
a! =q1q2q3
"
#
$$$
%
&
'''= 14q4
h23 ( h32( )h31 ( h13( )h12 ( h21( )
"
#
$$$$
%
&
''''
Assuming that q4 " 0
Pisacane, 2005
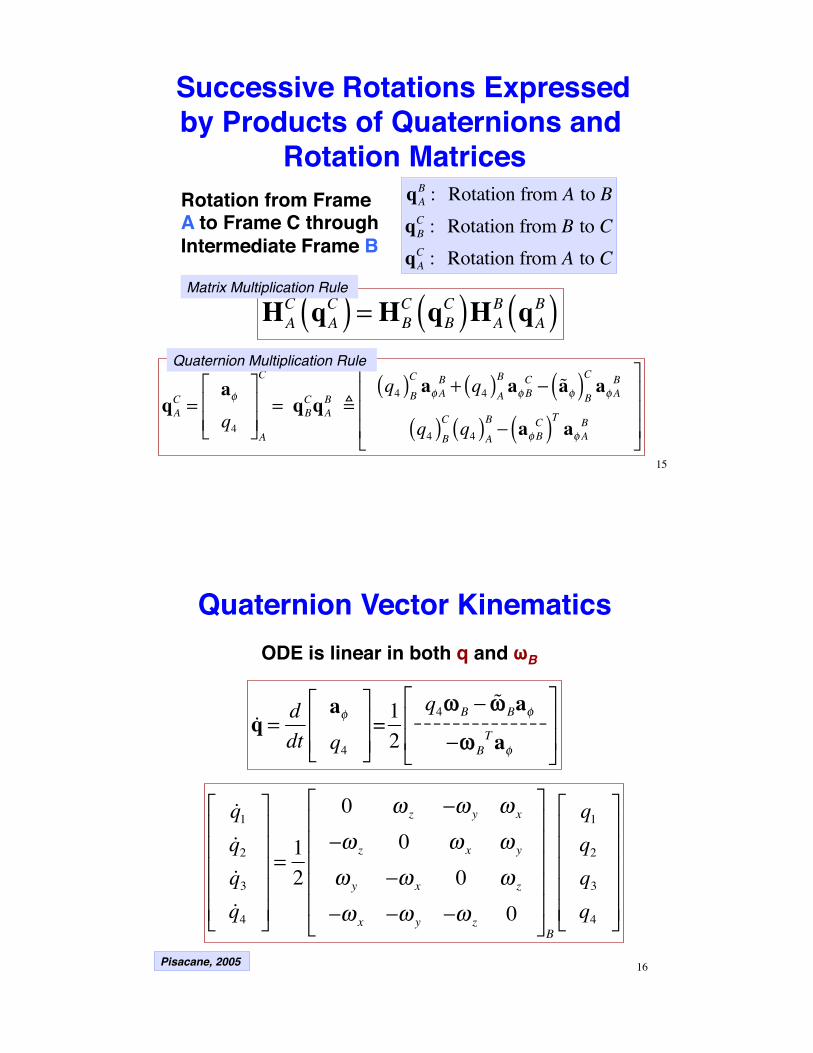
Successive Rotations Expressed by Products of Quaternions and
Rotation Matrices
15
qAB : Rotation from A to BqBC : Rotation from B to CqAC : Rotation from A to C
Rotation from Frame A to Frame C through Intermediate Frame B
HAC qA
C( ) = HBC qB
C( )HAB qA
B( )
qAC =
a!q4
"
#$$
%
&''A
C
= qBCqA
B !q4( )B
C a!AB + q4( )A
B a!BC ( "a!( )B
Ca!A
B
q4( )BC q4( )A
B ( a!BC( )T a!AB
"
#
$$$
%
&
'''
Quaternion Multiplication Rule
Matrix Multiplication Rule
Quaternion Vector Kinematics
16
ODE is linear in both q and #B
!q = ddt
a!q4
"
#$$
%
&''= 12
q4(( B ) "(( Ba!)(( B
Ta!
"
#
$$
%
&
''
!q1!q2!q3!q4
!
"
#####
$
%
&&&&&
= 12
0 ' z (' y ' x
(' z 0 ' x ' y
' y (' x 0 ' z
(' x (' y (' z 0
!
"
#####
$
%
&&&&&B
q1q2q3q4
!
"
#####
$
%
&&&&&
Pisacane, 2005
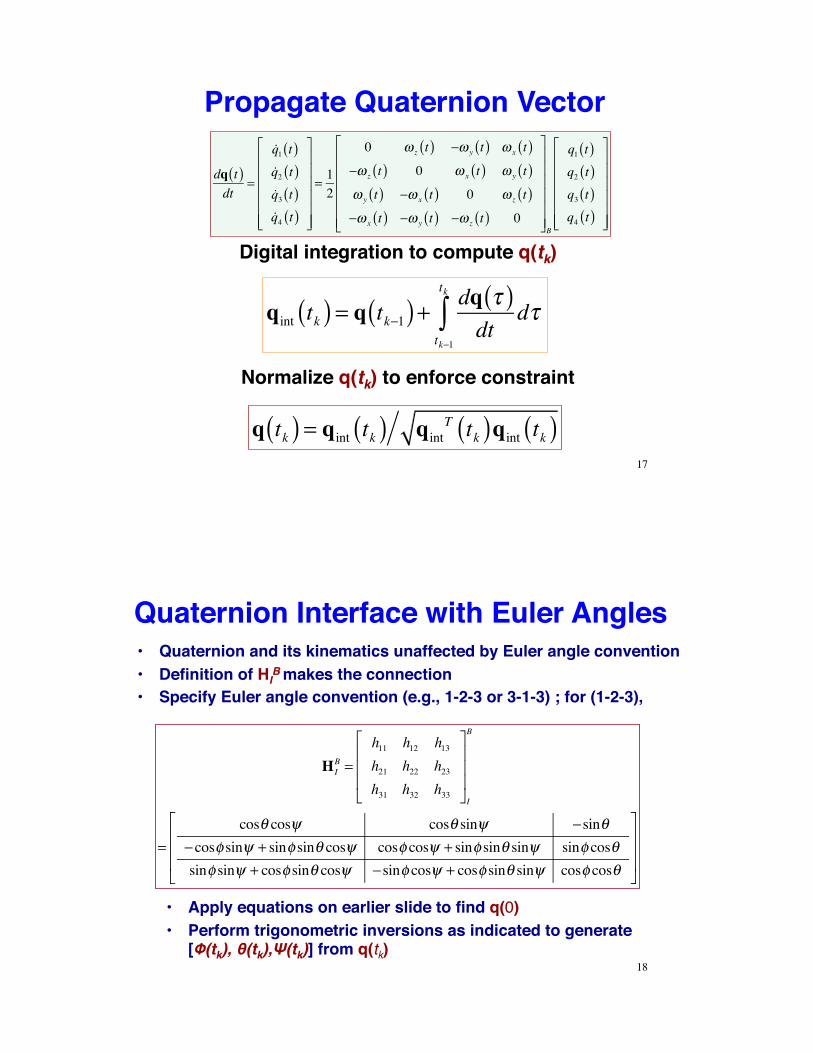
Propagate Quaternion Vector
17
dq t( )dt
=
!q1 t( )!q2 t( )!q3 t( )!q4 t( )
!
"
######
$
%
&&&&&&
= 12
0 ' z t( ) (' y t( ) ' x t( )(' z t( ) 0 ' x t( ) ' y t( )' y t( ) (' x t( ) 0 ' z t( )(' x t( ) (' y t( ) (' z t( ) 0
!
"
######
$
%
&&&&&&B
q1 t( )q2 t( )q3 t( )q4 t( )
!
"
######
$
%
&&&&&&
qint tk( ) = q tk!1( ) + dq "( )dt
d"tk!1
tk
#
Digital integration to compute q(tk)
Normalize q(tk) to enforce constraint
q tk( ) = qint tk( ) qintT tk( )qint tk( )
Quaternion Interface with Euler Angles
18
•! Quaternion and its kinematics unaffected by Euler angle convention•! Definition of HI
B makes the connection•! Specify Euler angle convention (e.g., 1-2-3 or 3-1-3) ; for (1-2-3),
H IB =
h11 h12 h13h21 h22 h23h31 h32 h33
!
"
###
$
%
&&&I
B
=cos' cos( cos' sin( )sin'
)cos* sin( + sin* sin' cos( cos* cos( + sin* sin' sin( sin* cos'sin* sin( + cos* sin' cos( )sin* cos( + cos* sin' sin( cos* cos'
!
"
###
$
%
&&&
•! Apply equations on earlier slide to find q(0)•! Perform trigonometric inversions as indicated to generate
["(tk), !(tk),#(tk)] from q(tk)
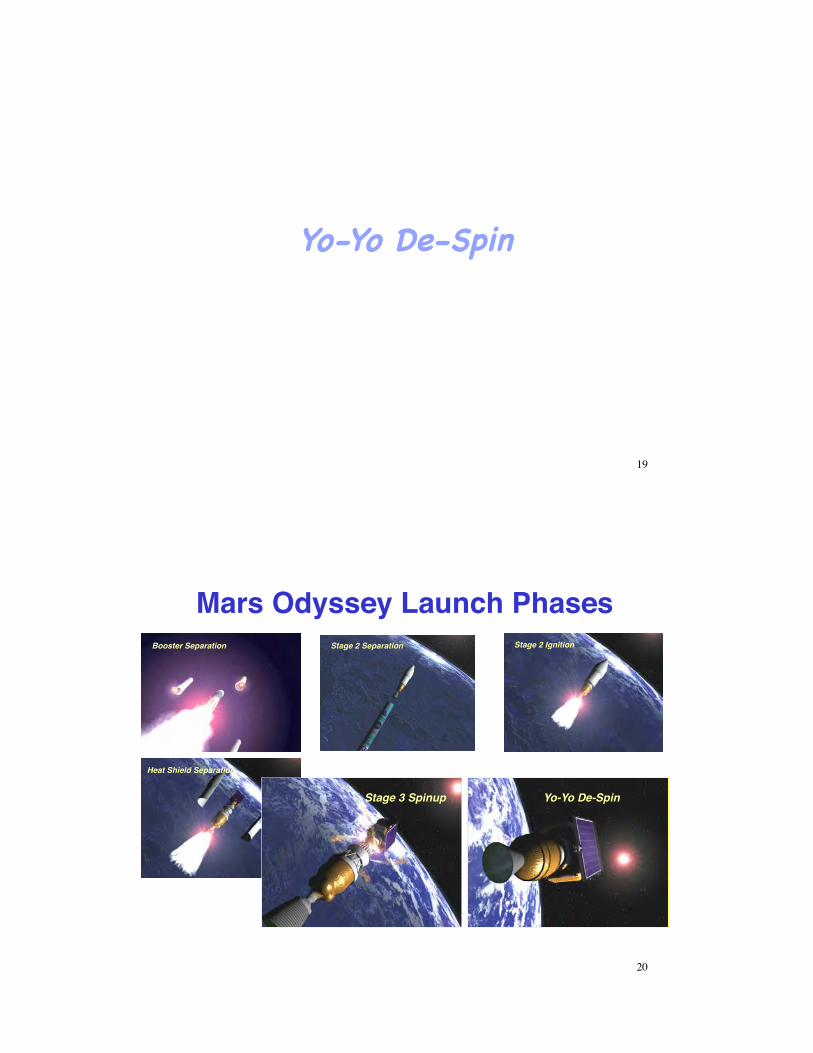
Yo-Yo De-Spin!
19
Mars Odyssey Launch PhasesBooster Separation Stage 2 Separation Stage 2 Ignition
Heat Shield Separation
Stage 3 Spinup Yo-Yo De-Spin
20
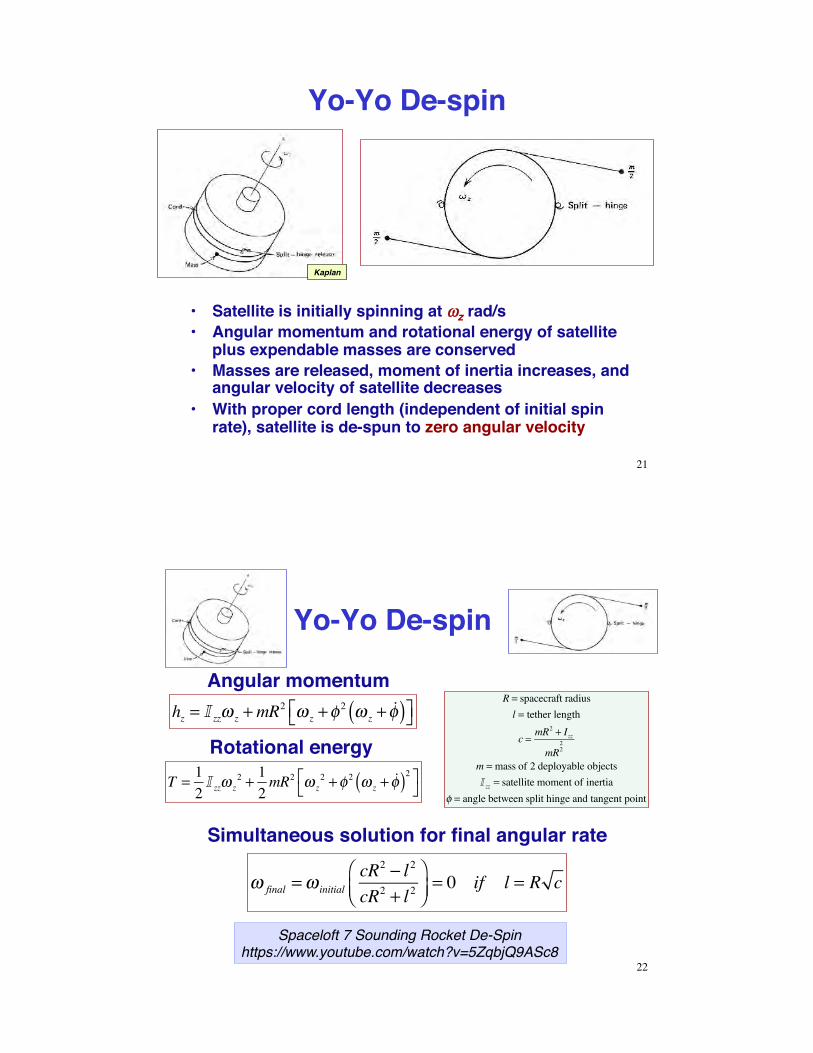
Yo-Yo De-spin
•! Satellite is initially spinning at !!z rad/s•! Angular momentum and rotational energy of satellite
plus expendable masses are conserved•! Masses are released, moment of inertia increases, and
angular velocity of satellite decreases•! With proper cord length (independent of initial spin
rate), satellite is de-spun to zero angular velocity
Kaplan
21
Yo-Yo De-spin
! final =! initialcR2 " l2
cR2 + l2#$%
&'(= 0 if l = R c
R = spacecraft radiusl = tether length
c = mR2 + Izz
mR22
m = mass of 2 deployable objectsI zz = satellite moment of inertia
! = angle between split hinge and tangent point
Angular momentum
Rotational energy
Simultaneous solution for final angular rate
hz = I zz! z +mR2 ! z +"
2 ! z + !"( )#$ %&
T = 1
2I zz! z
2 + 12mR2 ! z
2 +" 2 ! z + !"( )2#$
%&
22
Spaceloft 7 Sounding Rocket De-Spinhttps://www.youtube.com/watch?v=5ZqbjQ9ASc8
Continuously Variable Torque Controllers!
23
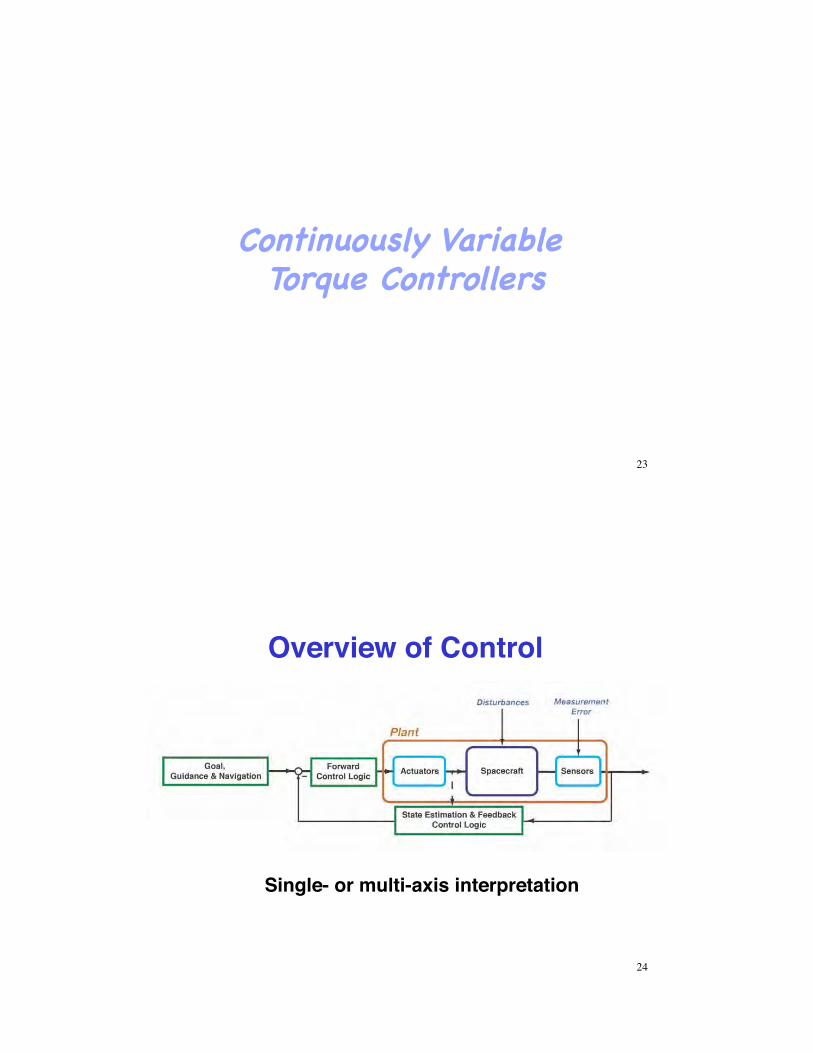
Overview of Control
24
Single- or multi-axis interpretation
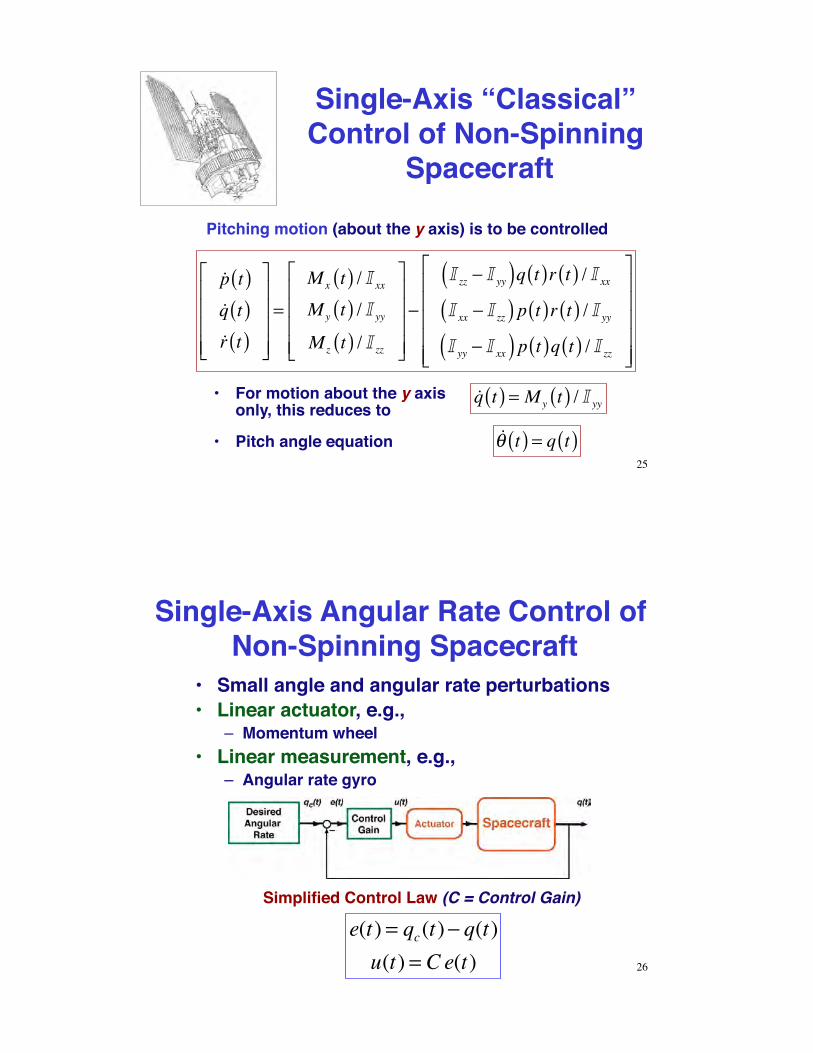
Single-Axis “Classical” Control of Non-Spinning
Spacecraft
Pitching motion (about the y axis) is to be controlled
!p t( )!q t( )!r t( )
!
"
####
$
%
&&&&
=
Mx t( ) / I xx
My t( ) / I yy
Mz t( ) / I zz
!
"
####
$
%
&&&&
'
I zz ' I yy( )q t( )r t( ) / I xx
I xx ' I zz( ) p t( )r t( ) / I yy
I yy ' I xx( ) p t( )q t( ) / I zz
!
"
#####
$
%
&&&&&
!q t( ) = My t( ) / I yy•! For motion about the y axis
only, this reduces to
!! t( ) = q t( )•! Pitch angle equation
25
Single-Axis Angular Rate Control of Non-Spinning Spacecraft
e(t) = qc(t)! q(t)u(t) = Ce(t)
Simplified Control Law (C = Control Gain)
•! Small angle and angular rate perturbations•! Linear actuator, e.g.,
–! Momentum wheel•! Linear measurement, e.g.,
–! Angular rate gyro
26
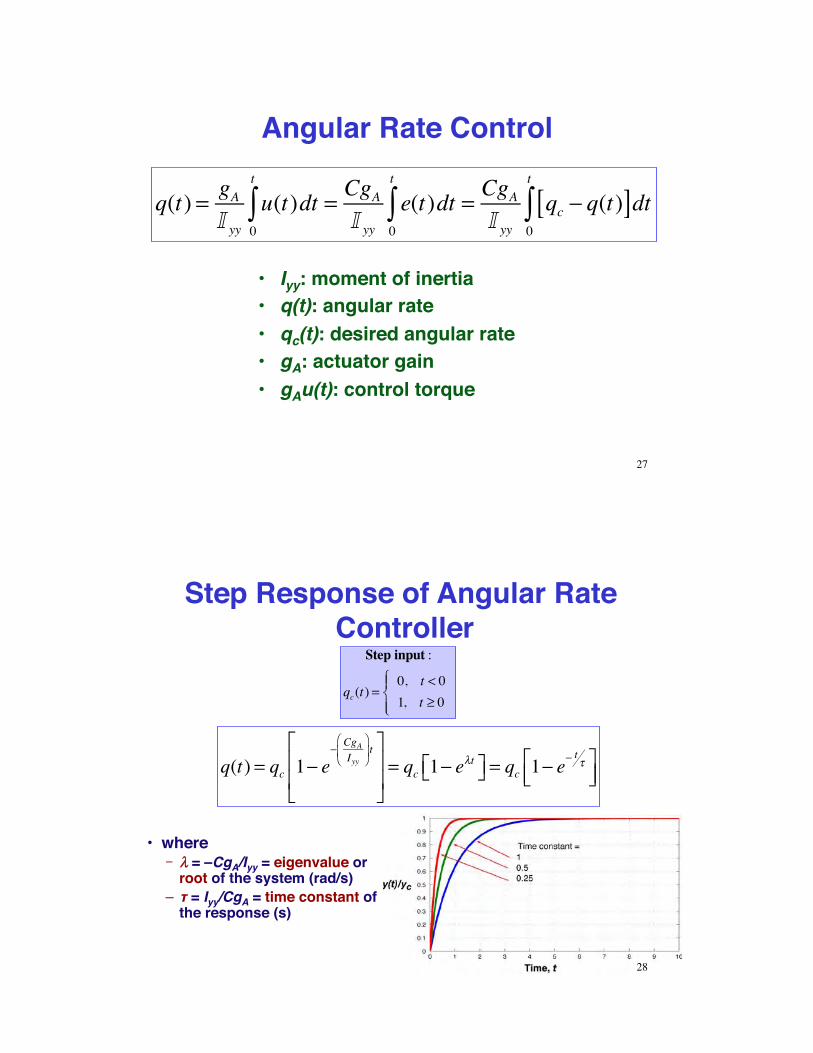
Angular Rate Control
•! Iyy: moment of inertia •! q(t): angular rate•! qc(t): desired angular rate•! gA: actuator gain •! gAu(t): control torque
q(t) = gA
I yy
u(t)0
t
! dt = CgAI yy
e(t)0
t
! dt = CgAI yy
qc " q(t)[ ]0
t
! dt
27
Step Response of Angular Rate Controller
q(t) = qc 1! e! CgA
Iyy
"
#$
%
&' t(
)
**
+
,
--= qc 1! e
.t() +, = qc 1! e! t /(
)*+,-
•! where! "" = –CgA/Iyy = eigenvalue or root of the system (rad/s)
–! $ = Iyy/CgA = time constant of the response (s)
Step input :
qc(t) =0, t < 01, t ! 0
"#$
%$
28
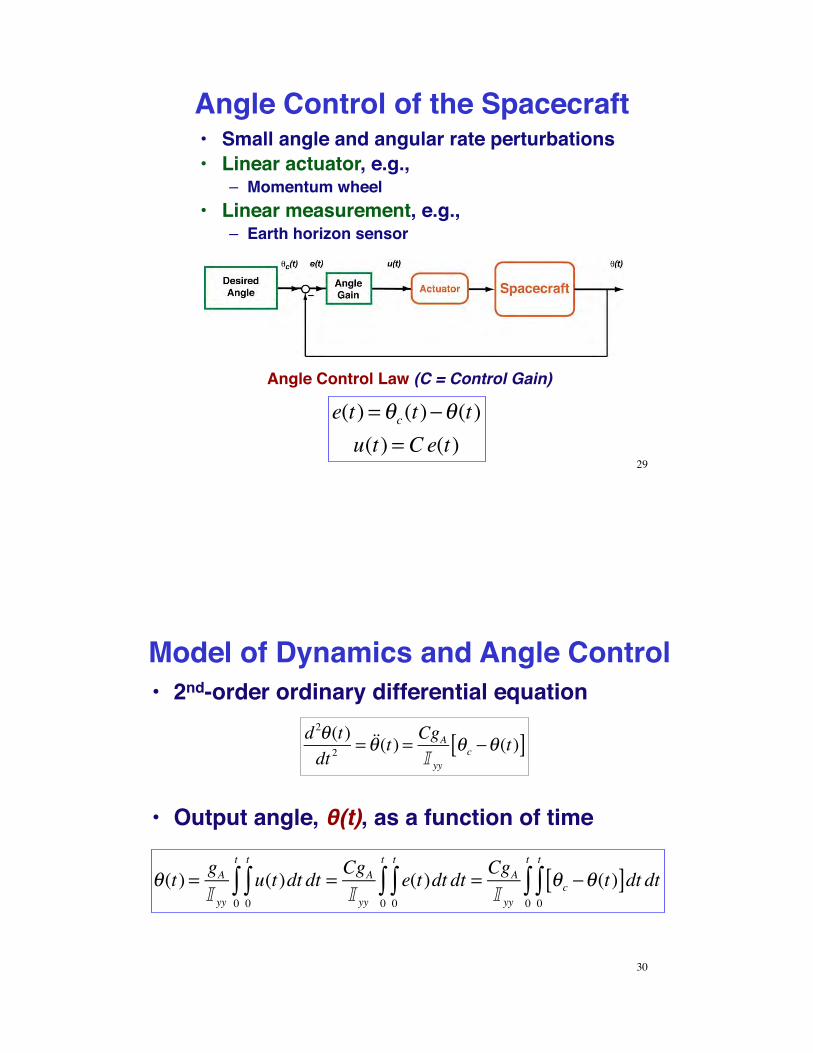
Angle Control of the Spacecraft
e(t) = !c(t)"!(t)u(t) = Ce(t)
Angle Control Law (C = Control Gain)
•! Small angle and angular rate perturbations•! Linear actuator, e.g.,
–! Momentum wheel•! Linear measurement, e.g.,
–! Earth horizon sensor
29
Model of Dynamics and Angle Control
!(t) = gA
I yy
u(t)0
t
" dt0
t
" dt = CgAI yy
e(t)0
t
" dt0
t
" dt = CgAI yy
!c #!(t)[ ]0
t
" dt dt0
t
"
•! 2nd-order ordinary differential equation
d 2!(t)dt 2
= !!!(t) = CgAI yy
!c "!(t)[ ]
•! Output angle, !(t), as a function of time
30
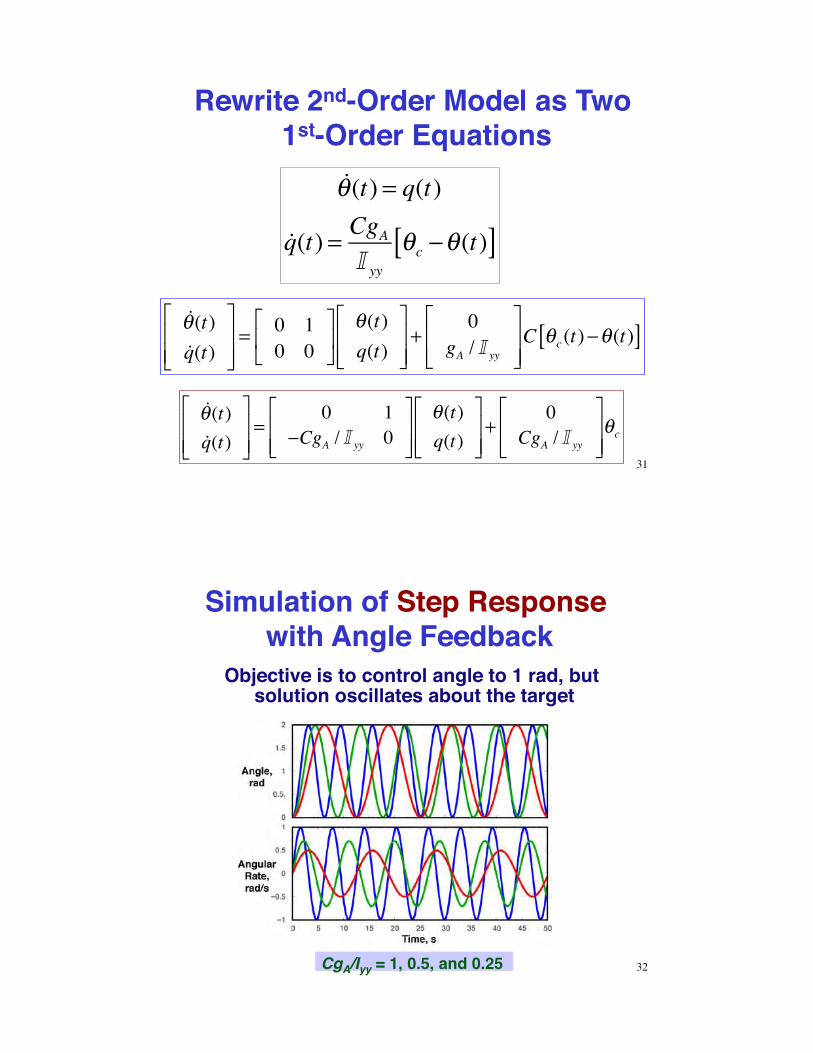
Rewrite 2nd-Order Model as Two 1st-Order Equations
!!(t) = q(t)
!q(t) = CgAI yy
!c "!(t)[ ]
!!(t)!q(t)
"
#$$
%
&''= 0 1
0 0"
#$
%
&'
!(t)q(t)
"
#$$
%
&''+
0gA / I yy
"
#$$
%
&''C !c(t)(!(t)[ ]
!!(t)!q(t)
"
#$$
%
&''=
0 1(CgA / I yy 0
"
#$$
%
&''
!(t)q(t)
"
#$$
%
&''+
0CgA / I yy
"
#$$
%
&''!c
31
Simulation of Step Response with Angle Feedback
Objective is to control angle to 1 rad, but solution oscillates about the target
CgA/Iyy = 1, 0.5, and 0.25 32
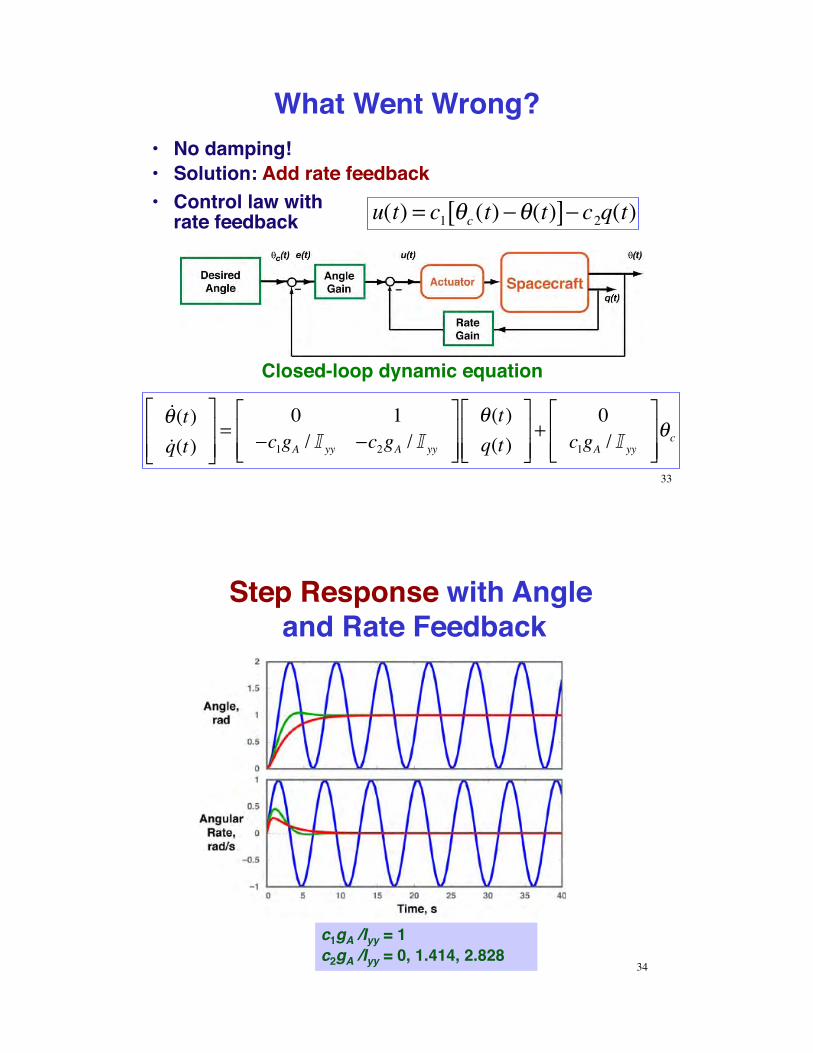
What Went Wrong?•! No damping!•! Solution: Add rate feedback
Closed-loop dynamic equation
u(t) = c1 !c (t) "!(t)[ ]" c2q(t)
!!(t)!q(t)
"
#$$
%
&''=
0 1(c1gA / I yy (c2gA / I yy
"
#$$
%
&''
!(t)q(t)
"
#$$
%
&''+
0c1gA / I yy
"
#$$
%
&''!c
•! Control law with rate feedback
33
c1gA /Iyy = 1 c2gA /Iyy = 0, 1.414, 2.828
Step Response with Angle and Rate Feedback
34
2nd-Order Dynamics
!!(t)!q(t)
"
#$$
%
&''=
0 1(c1gA / I yy (c2gA / I yy
"
#$$
%
&''
!(t)q(t)
"
#$$
%
&''+
0c1gA / I yy
"
#$$
%
&''!c
!!(t)!q(t)
"
#$$
%
&''=
0 1() n
2 (2*) n
"
#$$
%
&''
!(t)q(t)
"
#$$
%
&''+
0) n
2
"
#$$
%
&''!c
Oscillation and damping are induced by linear feedback control
! n = c1gA / I yy
" = c2gA / I yy( ) / 2! n = c2 / 2 c1gAI yy
Natural frequency and damping ratio
35
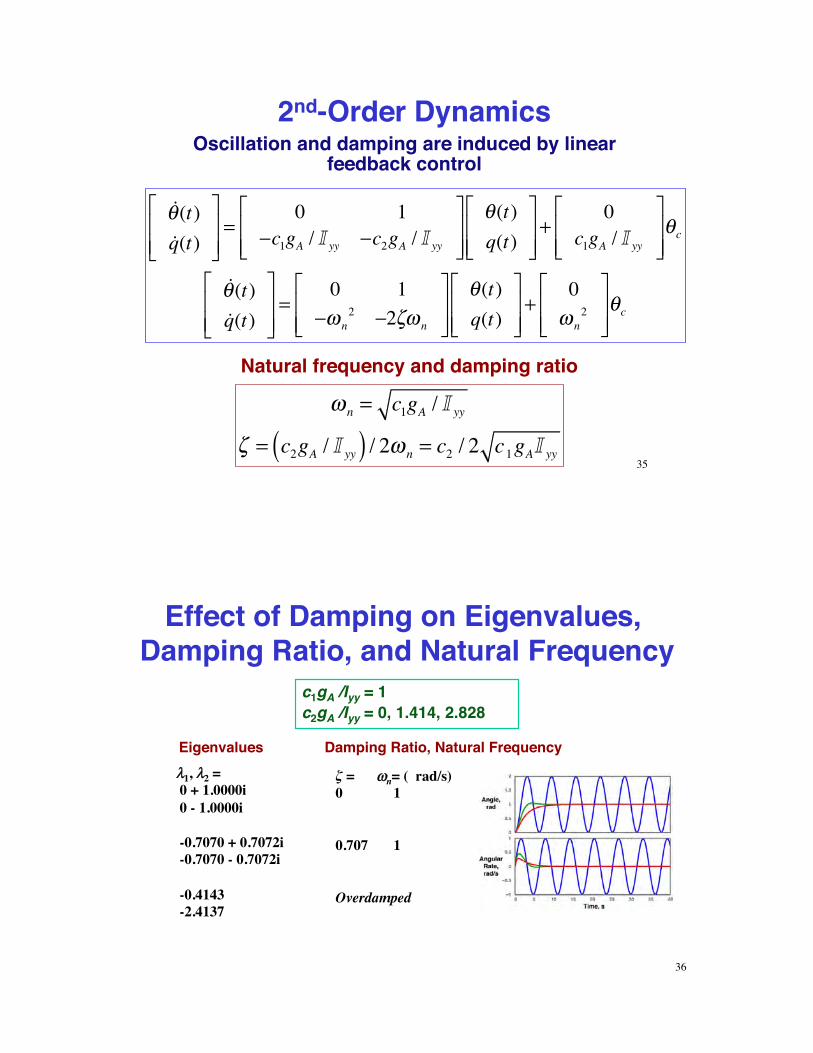
Effect of Damping on Eigenvalues, Damping Ratio, and Natural Frequency
""1, ""2 = 0 + 1.0000i 0 - 1.0000i
-0.7070 + 0.7072i -0.7070 - 0.7072i
-0.4143 -2.4137
Eigenvalues
! = !!n = ( rad/s) 0 1
0.707 1
Overdamped
Damping Ratio, Natural Frequency
c1gA /Iyy = 1 c2gA /Iyy = 0, 1.414, 2.828
36
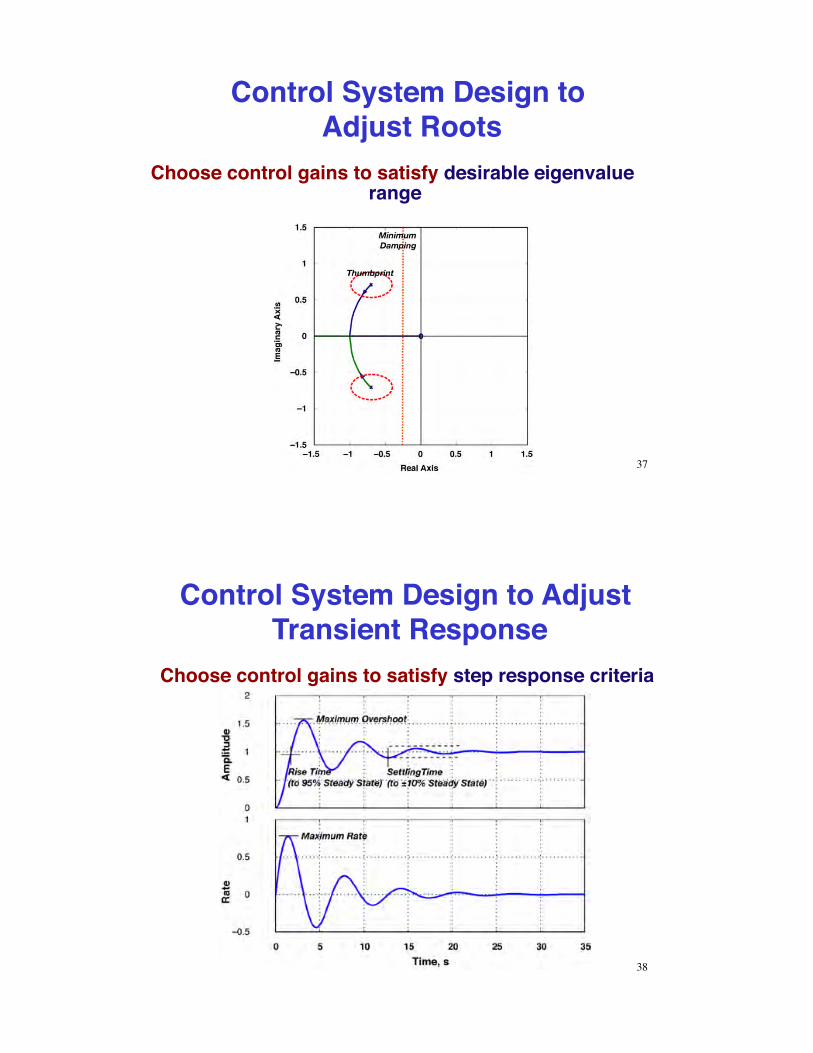
Control System Design to Adjust Roots
Choose control gains to satisfy desirable eigenvalue range
37
Control System Design to Adjust Transient Response
Choose control gains to satisfy step response criteria
38
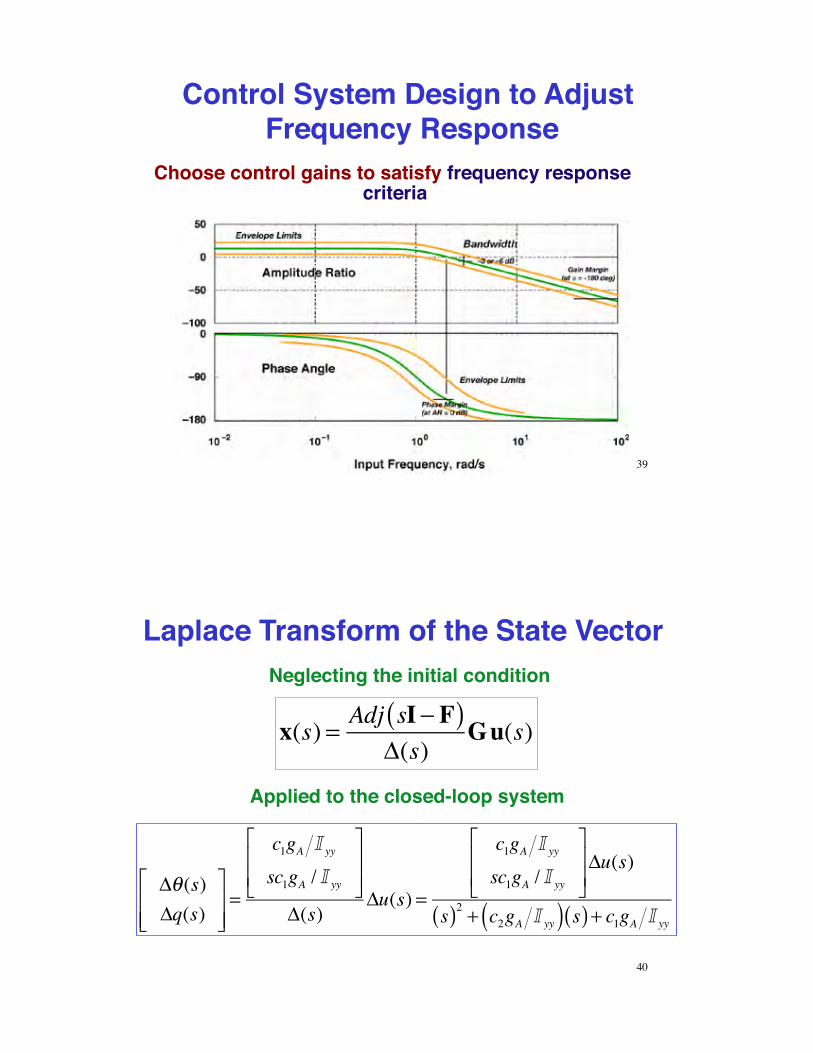
Control System Design to Adjust Frequency Response
Choose control gains to satisfy frequency response criteria
39
Laplace Transform of the State Vector
x(s) = Adj sI! F( )"(s)
Gu(s)
!"(s)!q(s)
#
$%%
&
'((=
c1gA I yy
sc1gA / I yy
#
$%%
&
'((
!(s)!u(s) =
c1gA I yy
sc1gA / I yy
#
$%%
&
'((!u(s)
s( )2 + c2gA I yy( ) s( ) + c1gA I yy
Applied to the closed-loop system
Neglecting the initial condition
40
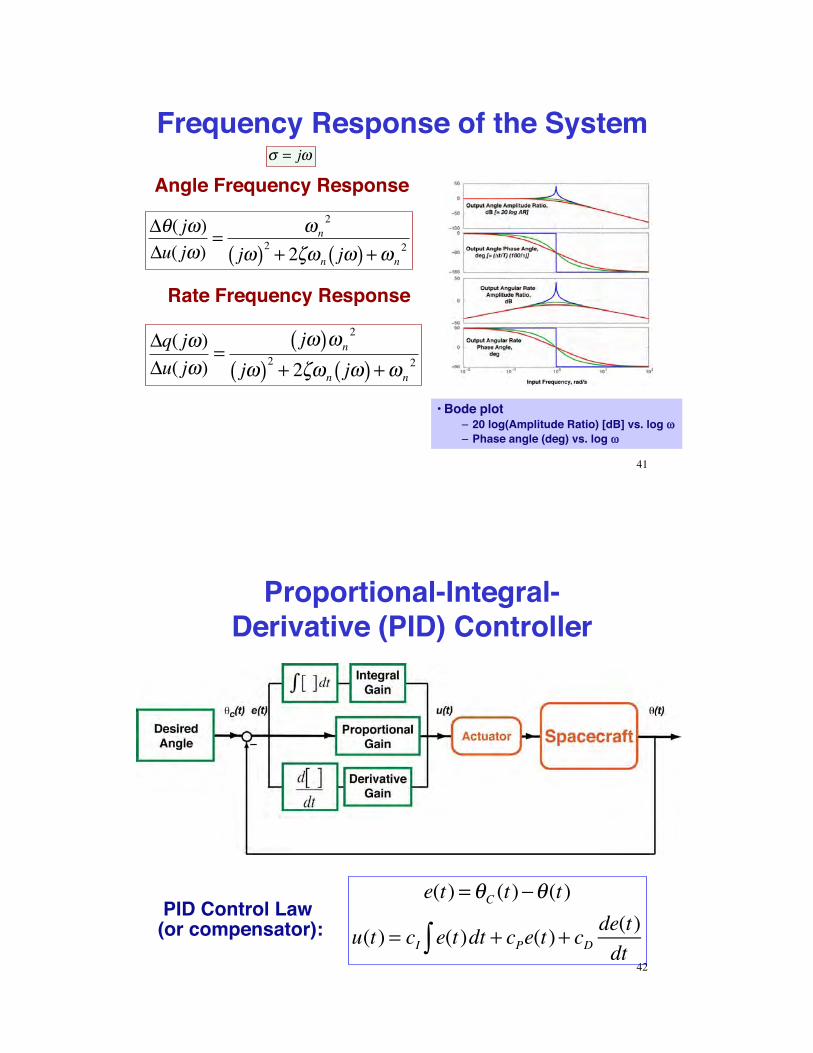
Frequency Response of the System
!"( j#)!u( j#)
= #n2
j#( )2 + 2$#n j#( ) + #n2
!q( j")!u( j")
=j"( )"n
2
j"( )2 + 2#"n j"( ) + "n2
Angle Frequency Response
Rate Frequency Response
•!Bode plot–! 20 log(Amplitude Ratio) [dB] vs. log !!–! Phase angle (deg) vs. log !!
41
! = j"
Proportional-Integral-Derivative (PID) Controller
PID Control Law (or compensator):
e(t) = !C (t)"!(t)
u(t) = cI e(t)# dt + cPe(t)+ cDde(t)dt
42
Proportional-Integral-Derivative (PID) Controller
Control Law Transfer Function:
e(s) = !C (s)"!(s)
Differentiator produces rate term for dampingIntegrator compensates for persistent (bias) disturbance
43
u(s) = cPe(s)+ cIe(s)s
+ cDse(s)
u(s)e(s)
= cI + cPs + cDs2
s
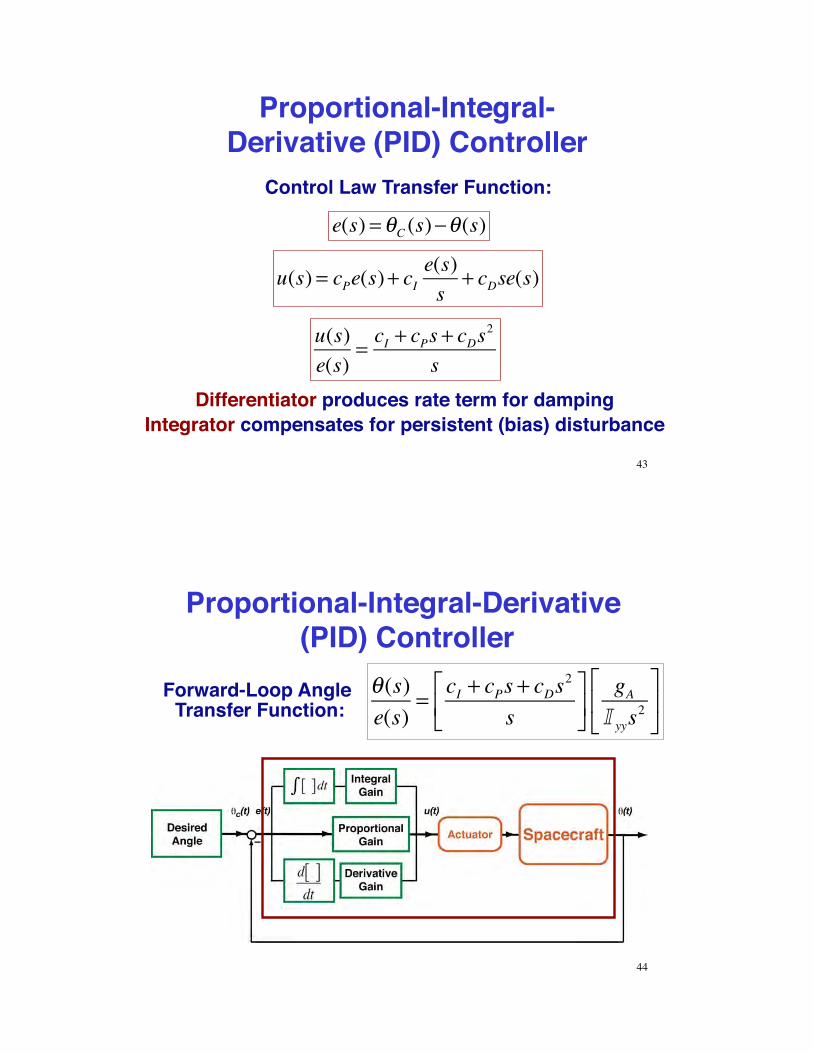
Proportional-Integral-Derivative (PID) Controller
Forward-Loop Angle Transfer Function:
!(s)e(s)
= cI + cPs + cDs2
s"
#$
%
&'
gAI yys
2
"
#$
%
&'
44
Closed-Loop Spacecraft Control Transfer Function w/PID Control
Closed-Loop Angle Transfer Function:
!(s)!c(s)
=
!(s)e(s)
1+ !(s)e(s)
=
cI + cPs + cDs2
I yys3 gA
"
#$
%
&'
1+ cI + cPs + cDs2
I yys3 gA
"
#$
%
&'
= cI + cPs + cDs2
cI + cPs + cDs2 + gA / I yys
345
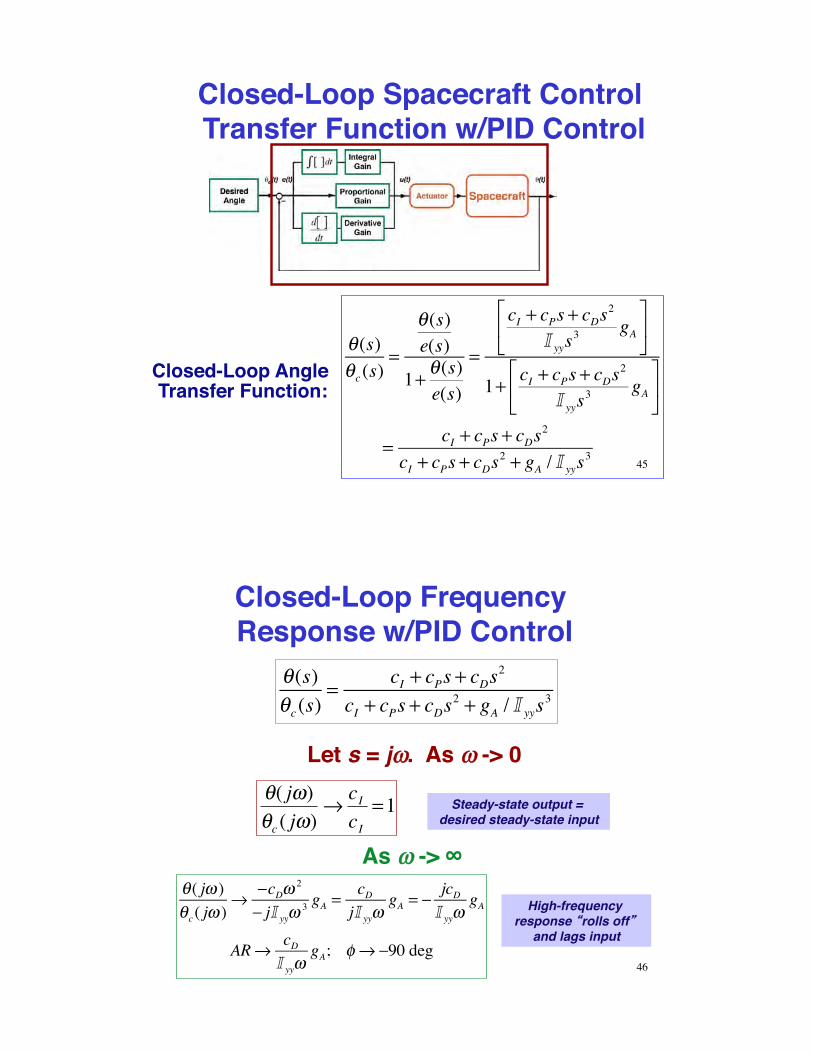
Closed-Loop Frequency Response w/PID Control
Let s = j!!. As !! -> 0
!( j")!c ( j")
# cIcI
=1 Steady-state output = desired steady-state input
!(s)!c(s)
= cI + cPs + cDs2
cI + cPs + cDs2 + gA / I yys
3
As !! -> $
!( j" )!c( j" )
# $cD"2
$ jI yy"3 gA =
cDjI yy"
gA = $ jcDI yy"
gA
AR# cDI yy"
gA; % # $90 deg
High-frequency response rolls off
and lags input
46
State ( Phase )-Plane Plots
Cross-plot of angle (or displacement) against rateTime not shown explicitly in phase-plane plot
47
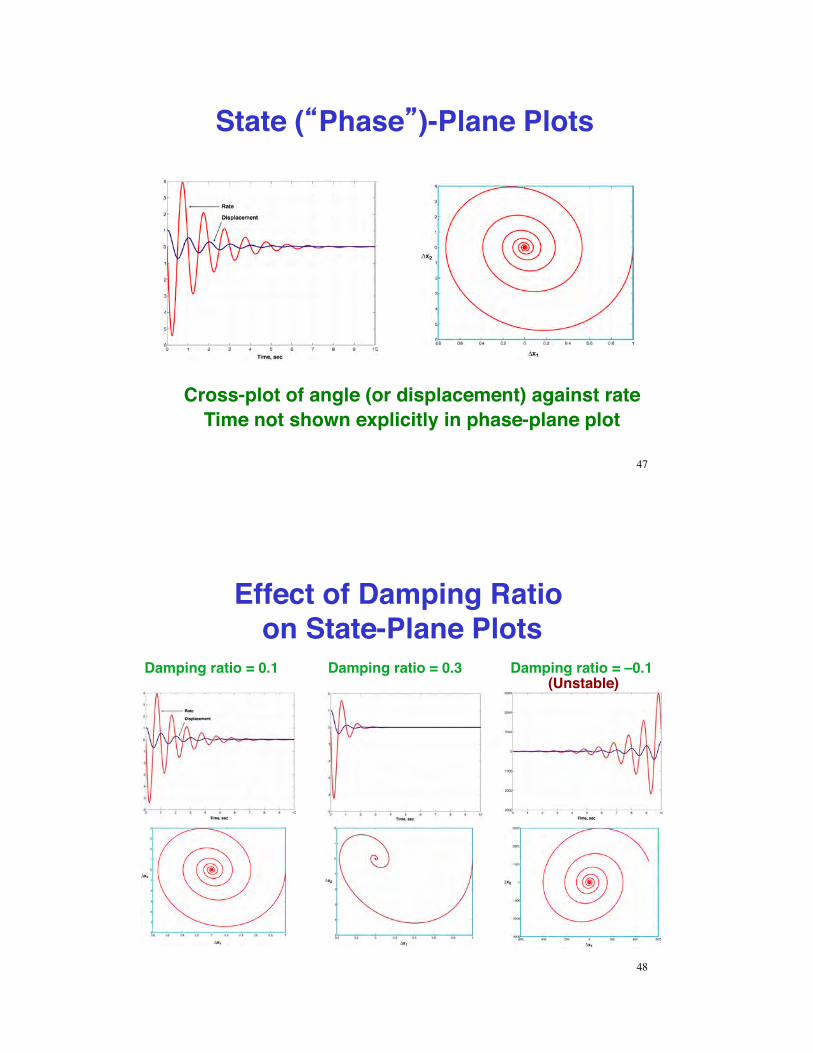
Effect of Damping Ratio on State-Plane Plots
Damping ratio = 0.1 Damping ratio = 0.3 Damping ratio = –0.1 (Unstable)
48
On/Off-Torque Controllers!
49
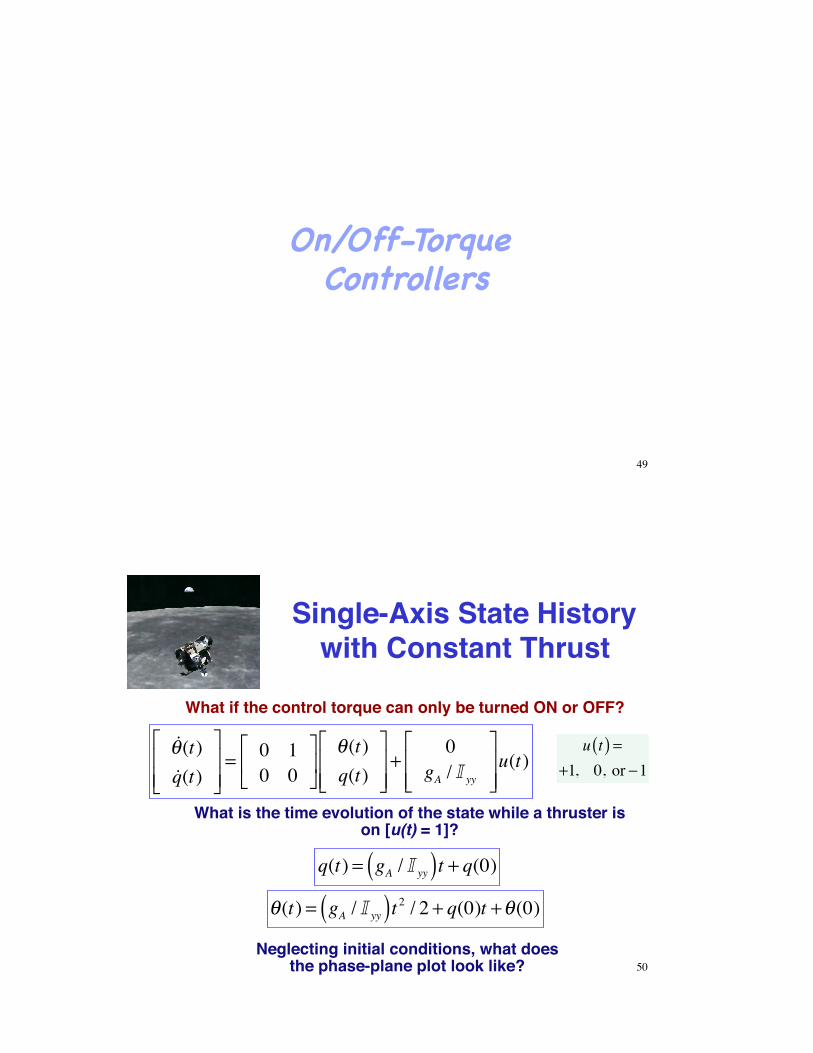
Single-Axis State History with Constant Thrust
!!(t)!q(t)
"
#$$
%
&''= 0 1
0 0"
#$
%
&'
!(t)q(t)
"
#$$
%
&''+
0gA / I yy
"
#$$
%
&''u(t)
What is the time evolution of the state while a thruster is on [u(t) = 1]?
q(t) = gA / I yy( )t + q(0)
!(t) = gA / I yy( )t 2 / 2 + q(0)t +!(0)Neglecting initial conditions, what does
the phase-plane plot look like?
What if the control torque can only be turned ON or OFF?
50
u t( ) =+1, 0, or !1
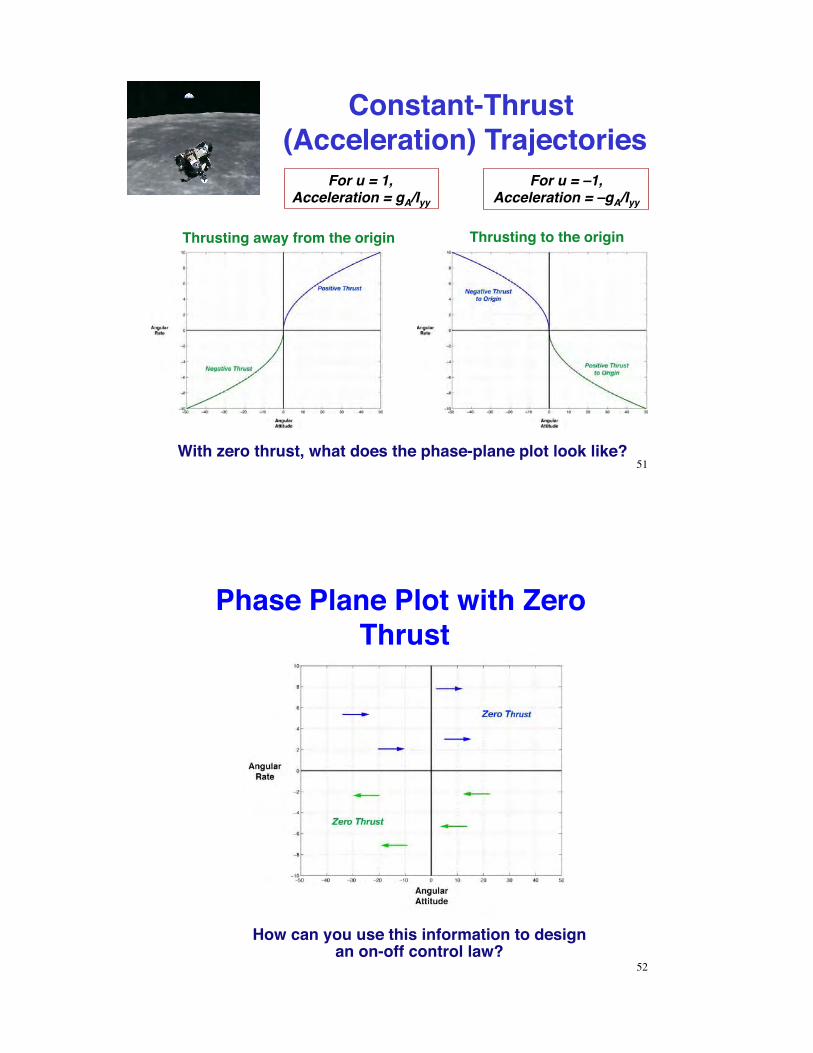
Constant-Thrust (Acceleration) Trajectories
For u = 1,Acceleration = gA/Iyy
Thrusting away from the origin Thrusting to the origin
With zero thrust, what does the phase-plane plot look like?
For u = –1,Acceleration = –gA/Iyy
51
Phase Plane Plot with Zero Thrust
52
How can you use this information to design an on-off control law?
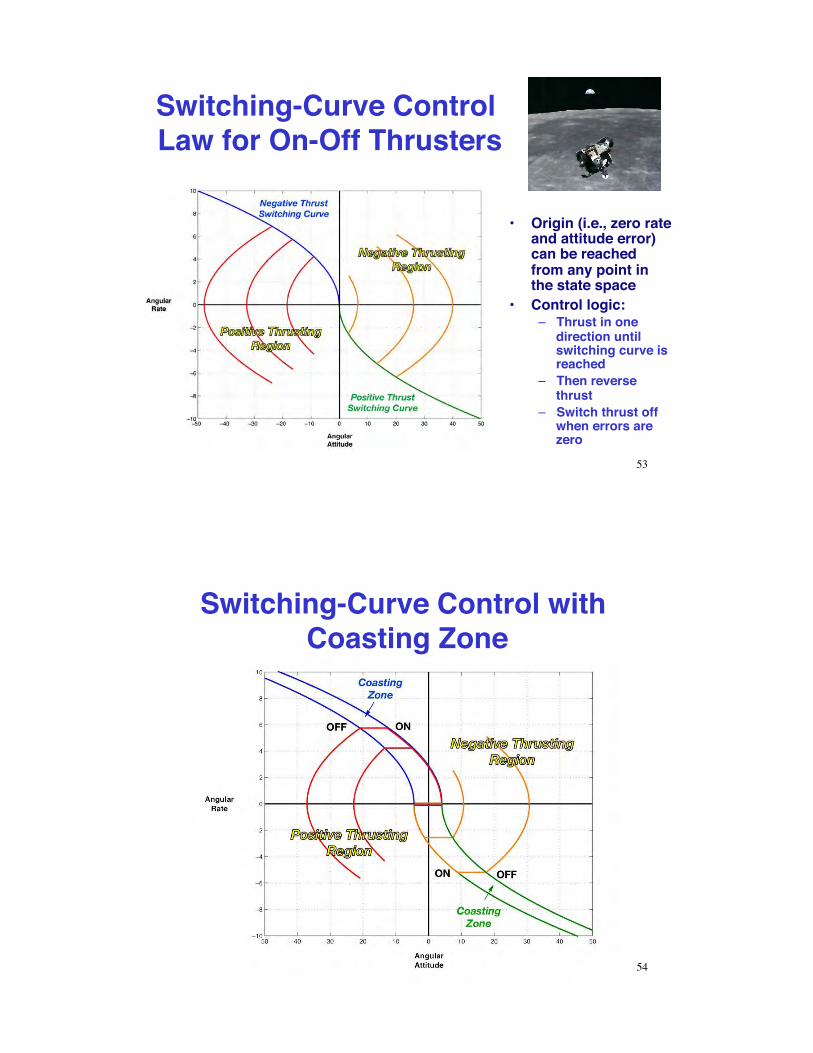
Switching-Curve Control Law for On-Off Thrusters
•! Origin (i.e., zero rate and attitude error) can be reached from any point in the state space
•! Control logic:–! Thrust in one
direction until switching curve is reached
–! Then reverse thrust
–! Switch thrust off when errors are zero
53
Switching-Curve Control with Coasting Zone
54
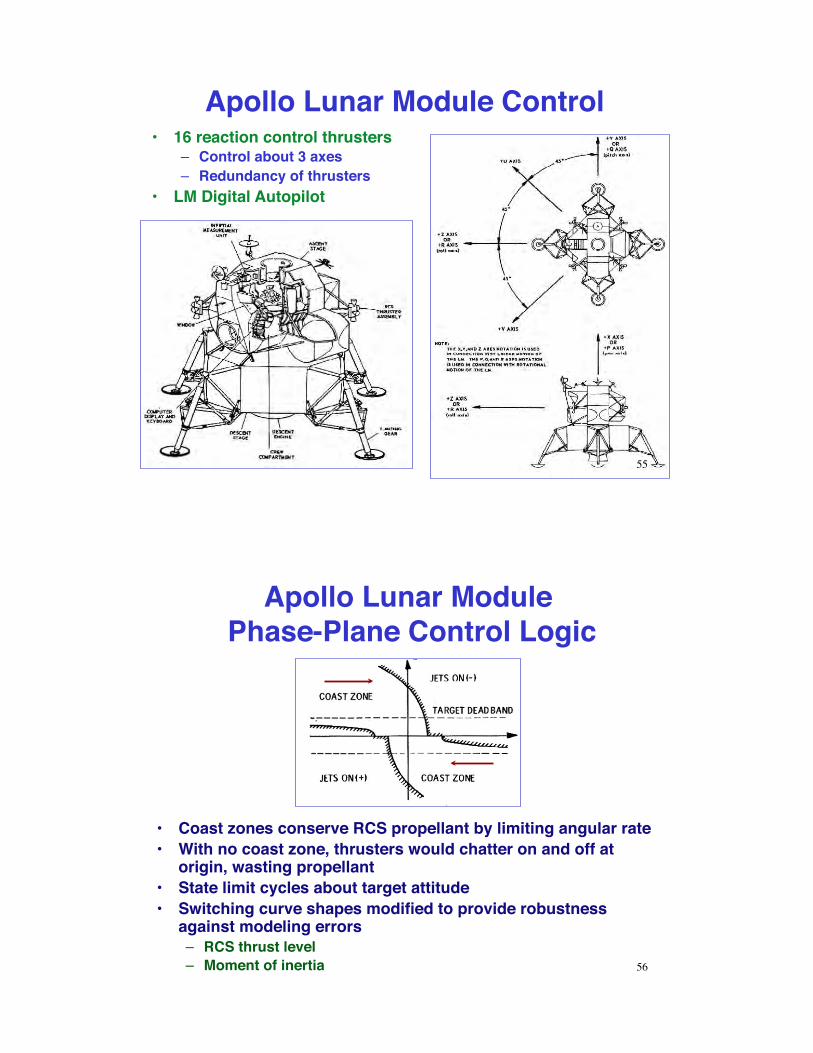
Apollo Lunar Module Control•! 16 reaction control thrusters
–! Control about 3 axes–! Redundancy of thrusters
•! LM Digital Autopilot
55
Apollo Lunar Module Phase-Plane Control Logic
•! Coast zones conserve RCS propellant by limiting angular rate•! With no coast zone, thrusters would chatter on and off at
origin, wasting propellant•! State limit cycles about target attitude•! Switching curve shapes modified to provide robustness
against modeling errors–! RCS thrust level–! Moment of inertia 56
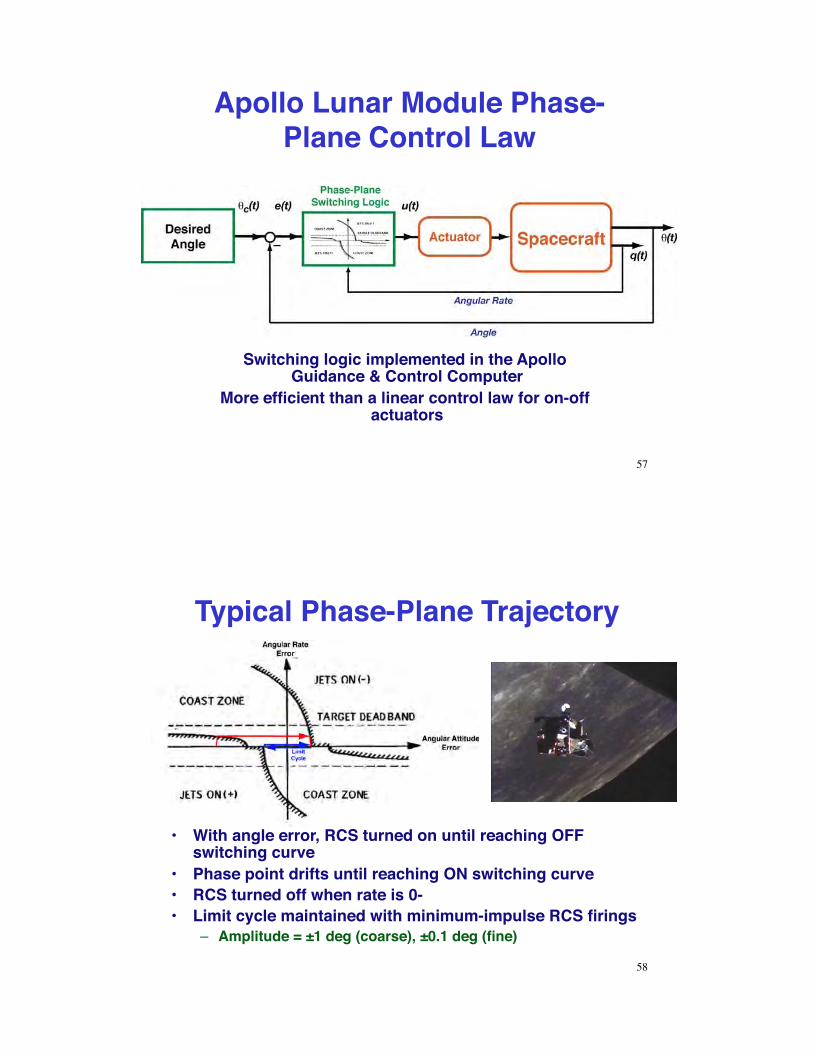
Apollo Lunar Module Phase-Plane Control Law
Switching logic implemented in the Apollo Guidance & Control Computer
More efficient than a linear control law for on-off actuators
57
Typical Phase-Plane Trajectory
•! With angle error, RCS turned on until reaching OFF switching curve
•! Phase point drifts until reaching ON switching curve•! RCS turned off when rate is 0-•! Limit cycle maintained with minimum-impulse RCS firings
–! Amplitude = ±1 deg (coarse), ±0.1 deg (fine)
58
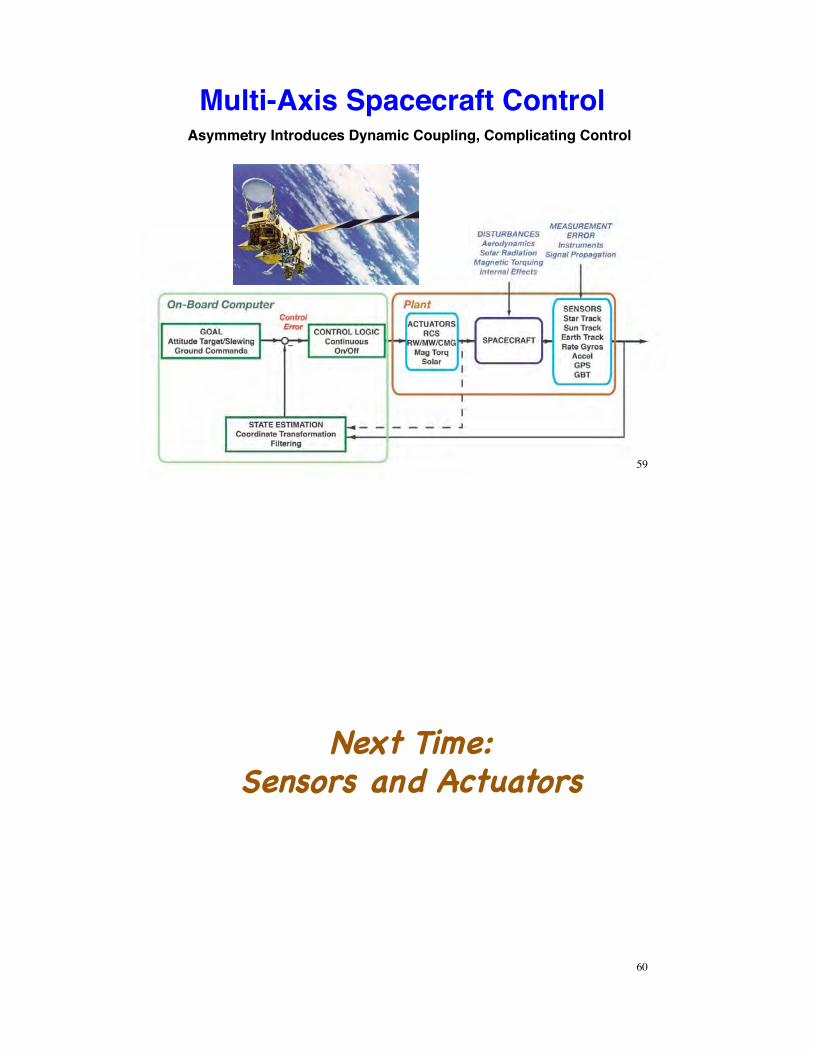
Multi-Axis Spacecraft Control
59
Asymmetry Introduces Dynamic Coupling, Complicating Control
Next Time:!Sensors and Actuators!
60
SSuupppplleemmeennttaall MMaatteerriiaall
61
62
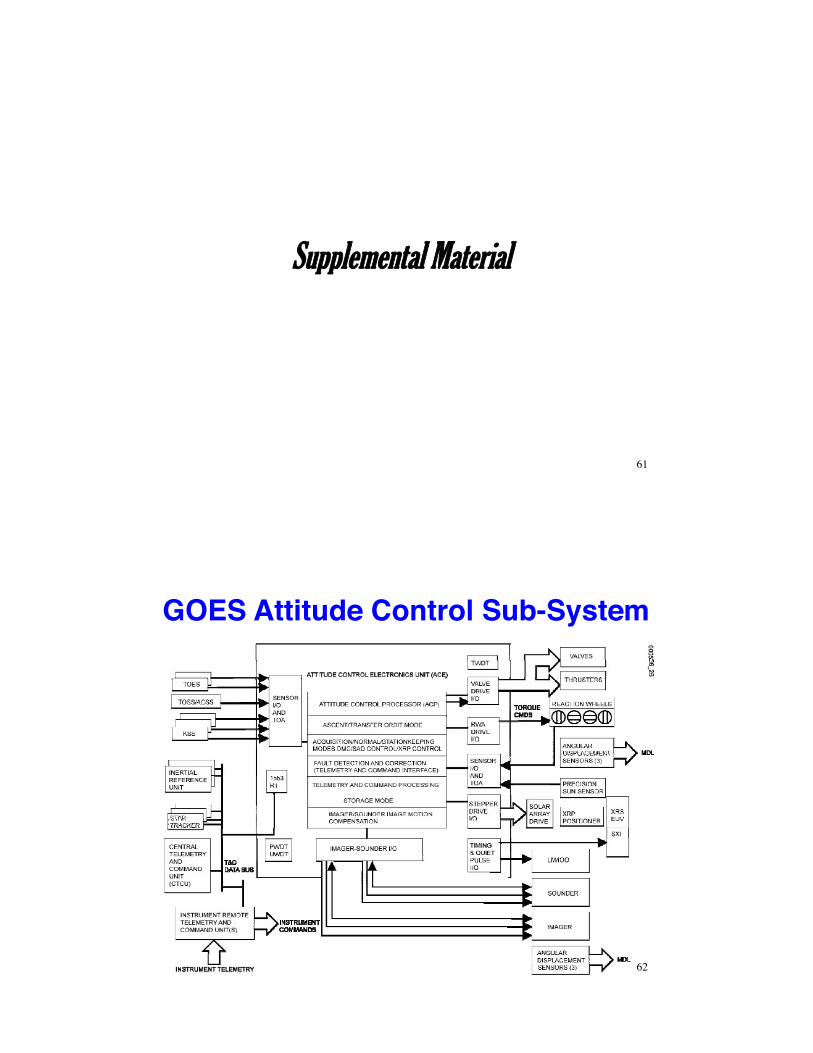
GOES Attitude Control Sub-System