stepper miotor
TRANSCRIPT

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 1/40
STEPPER MOTORy A stepper motor is a brushless, synchronous electric motor
that converts digital pulses into mechanical shaft rotation.
y Every revolution of the stepper motor is divided into adiscrete number of steps, and the motor must be sent a
separate pulse for each step.y The stepper motor can only take one step at a time and each
step is the same size.
y Typical step sizes are 2°, 2.5° ,3°, 7.5° , 15°, 30°

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 2/40
TYPES OF STEPPER MOTORy V ARIABLE RELUCTANCE
yPERMANENT MAGNET
y
HYBRID

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 3/40
VARIABLE RELUCTANCE STEPPER
y The rotor is a soft iron cylinder with salient (protruding)poles.
y This is the least complex, most inexpensive stepper motor.
y The only type stepper with no detent torque in hand rotationof a de-energized motor shaft.
y Large step angle
y A lead screw is often mounted to the shaft for linear stepping
motion.
8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 4/40

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 5/40
y In looking at this figure, note the following:
1. The field appears to rotate counter clockwise while therotor rotates clockwise. This arrangement is common with variable reluctance motors.
y 2. The field rotates in steps of 60 degrees while the rotormoves in 30 degree steps (in the opposite direction). This isreminiscent of the motion of the scale of a vernier caliper,and for this reason, variable reluctance motors aresometimes known as vernier motors.
y 3. It takes four complete cycles of the control system to rotatethe motor rotor through one cycle. This is because the rotorhas 4 poles!

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 6/40

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 7/40
Permanent Magnet Stepper motors
y Rotor is made of permanent magnetic material
y No teeth on rotor
y No freewheeling
y more torque during rotation
y Less acceleration
y Difficult to make small step pm rotors with a large number
of poles. i.e. step sizes are limited to 30° - 90°.

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 8/40
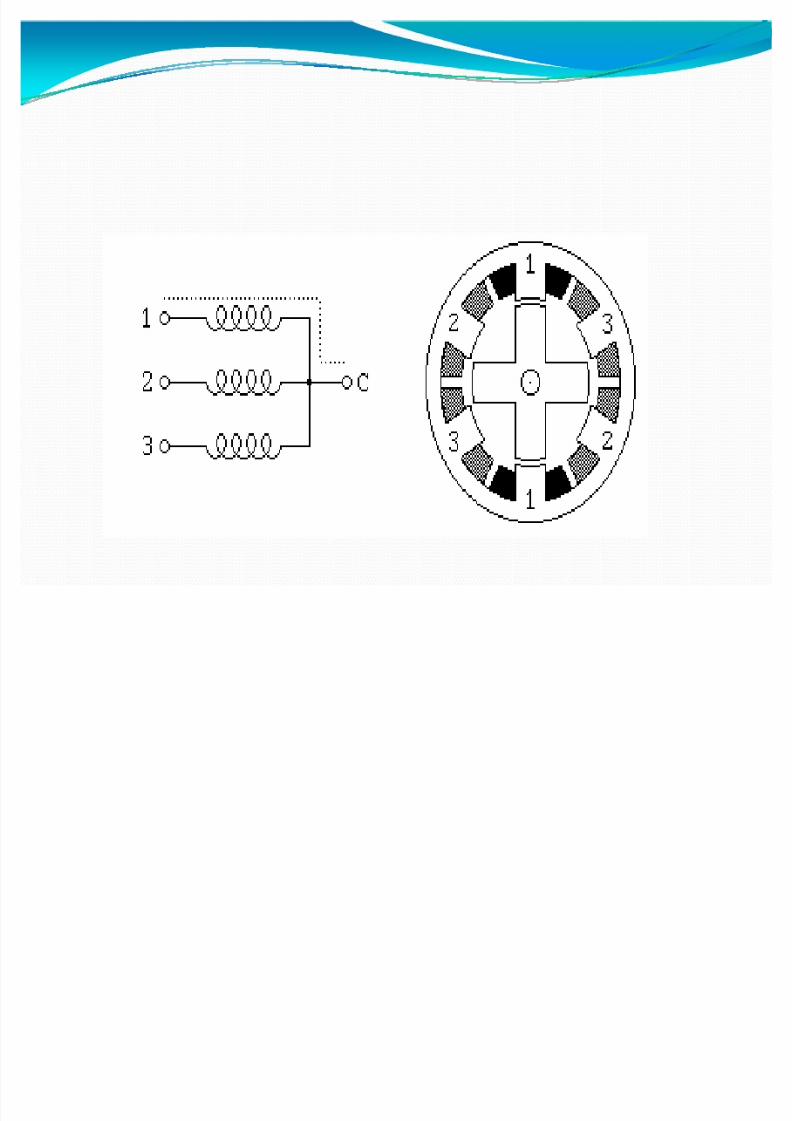
PERMANENT MAGNET STEPPER
MOTOR
y Components of a PM stepper motor: (a) Rotor; (b) stator
Figure 6-18 Components of a PM stepper motor: (a) Rotor; (b) stato

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 9/40

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 10/40
y
In looking at this figure, note the following:y This 6-pole rotor turns in a direction opposite the
rotation of the stator field; a two-pole rotor inside theexact same stator would rotate with the field.
y This illustration is based on half-step control, wherealternate half steps involve one and two motor windings.
y It takes three complete cycles of the control system toturn this 6-pole rotor one revolution. A two-pole rotor
would turn a full revolution per control system cycle.

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 11/40

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 12/40
HYBRID MOTORS
y The hybrid stepper motor combines features of both the variable reluctance stepper and the permanent magnetstepper to produce a smaller step angle.
y The rotor is a cylindrical permanent magnet, magnetizedalong the axis with radial soft iron teeth
y The stator coils are wound on alternating poles withcorresponding teeth.

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 13/40
HYBRID

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 14/40

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 15/40
CHARACTERSTI
CS
PERMANENT
MAGNET
VARIABLE
RELUCTANC
E
HYBRID
COST CHEAPEST MODERATE MOSTEXPENSI V E(due tomanufacturingprocess)
DESIGN MODERATELY
COMPLEX
SIMPLE COMPLEX
R ESOLUTION 30 deg 3 deg / step 1.8 deg /step andsmaller
1.8 deg /step andsmaller
TORQUE VS SPEED
LESSPRONOUNCEDTORQUE DROP ATHIGHER SPEEDS
NOISE QUIET NOISY QUIET

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 16/40
STEPPER MOTOR SERVO MOTOR
1. Steppers are good for small
load application
Servo dc motors good up to 1 hp,
and brushless can be up to 50,000
hp
2. Steppers are usually open loop,
count steps and may be has stop
sensor.
Servos are closed loop controlled
with feedback sensors.
3. They are commonly used in
printers , clocks etc .,
automation and CNC
applications.
4. The main difference is Steppermotor can operate with or
without feedback(Encoders ,
Resolvers).But the exact position
will not be known by thecontroller.
In case of Servo motor feedback must be used and also accuracy is
obtained.Most of the big
machines operate on Servo's.

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 17/40
CHARACTERSTICS
SERVO MOTOR STEPPER MOTOR
COST The cost for a servo motorand servo motor system ishigher than that of astepper motor system withequal power rating.
Steppers are generally cheaperthan servo motors that have thesame power rating.
VERSATILITY Servo motors are very versatile in their use for
automation and CNCapplications
Stepper motors are also very versatile in their use for automation
and CNC applications. Because of their simplicity stepper motors may be found on anything from printersto clocks.
LOW SPEED AND
HIGH TORQUE
Servo motors will do fine with low speed
applications given lowfriction and the correctgear ratio
Stepper motors provide mosttorque at low speed (RPM)
HIGH SPEED AND
HIGH TORQUE
Servo motors maintaintheir rated torque to about90% of their no load RPM
Stepper motors lose up to 80% of their maximum torque at 90% of their maximum RPM
OVER LOAD Servo motors may Stepper motors are unlikely to be

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 18/40
CHARACTERSTICS
SERVOMOTOR
STEPPER MOTOR
POWER TO
WEIGHT/SIZERATIO
Servo motors have anexcellent power to weightratio given theirefficiency
Stepper motors are less efficientthan servo motors which usually means a smaller power to weight/size ratio
EFFICIENY Servo motors are very efficient. Yielding 80-90% efficiency given light
loads
Stepper motors consume a lot of power given their output, much of which is converted to heat. Stepper
motors are usually about 70%efficient but this has some to do with the stepper drive
FLEXIBILITY IN
MOTOR
RESOLUTION
Since the encoder on aservo motor determinesthe motor resolution
servos have a wide rangeof resolutions available.
Stepper motors usually have 1.8 or0.9 degree resolution. Howeverthanks to micro-stepping steppers
can obtain higher resolutions. Thisis up to the driver and not themotor.
TORQUE TO
INERTIA RATIO
Servo motors are very capable of acceleratingloads
Stepper motors are also capable of accelerating loads but not as wellas servo motors. Stepper motors
may stall and skip steps if themotor is not powerful enough.

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 19/40
CHARACTERSTICS
SERVO MOTOR STEPPER MOTOR
NOISE Servo motors produce very little noise.
Stepper motors produce a slighthum due to the control process.However a high quality driver willdecrease the noise level.
MOTOR
IMPLI ITY
Servo motors are moremechanically complex due totheir internal parts and the
external encoders
Stepper motors are very simple indesign with no designed
consumable part
DIR E TDR IVE
APABILITY
Servo motors usually requiremore gearing ratios due totheir high RPM. It is very rare
to see a direct drive servomotor setup.
Stepper motors will work fine indirect drive mode. Many peoplesimple use a motor couple and
attach the motor shaft directly tothe lead screw or ball screw
POWER R ANGE Because servo motors areavailable in DC and AC servomotors have a very widepower availability range
The power availability range forstepper motors is not that of servomotors
8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 20/40
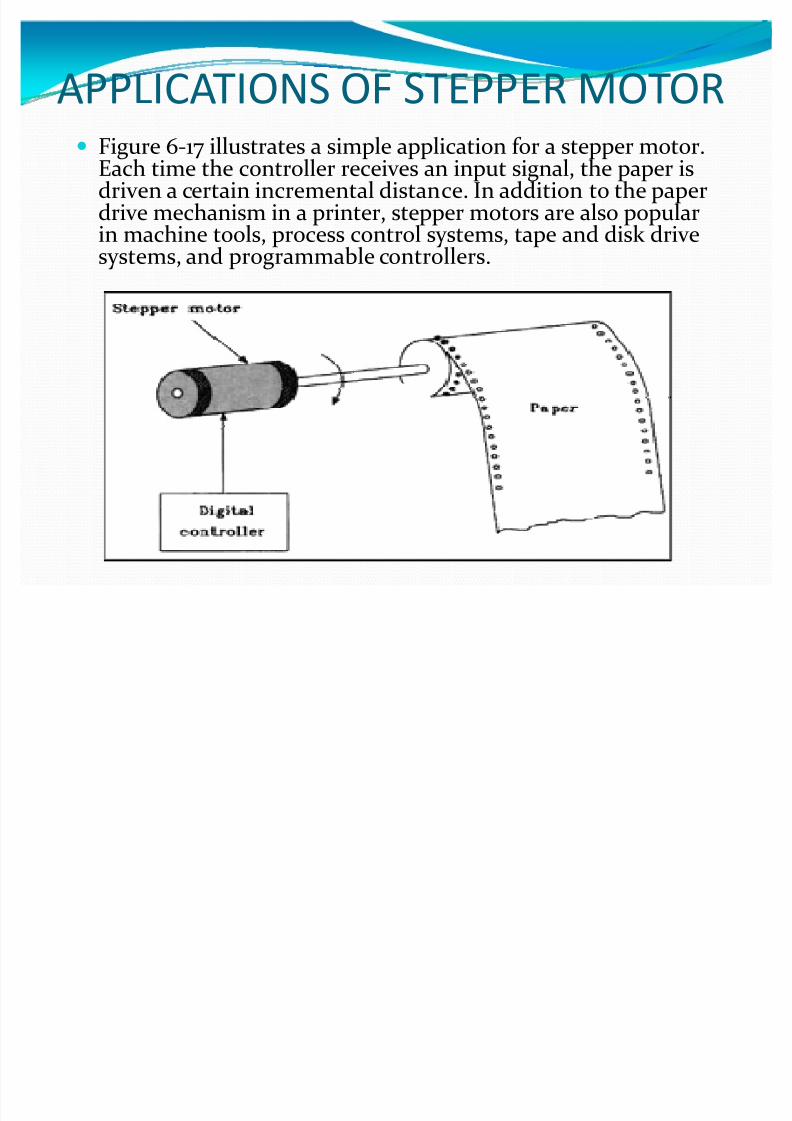
APPLICATIONS OF STEPPER MOTORy Figure 6-17 illustrates a simple application for a stepper motor.
Each time the controller receives an input signal, the paper isdriven a certain incremental distance. In addition to the paperdrive mechanism in a printer, stepper motors are also popularin machine tools, process control systems, tape and disk drivesystems, and programmable controllers.

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 21/40
OTHER APPLICATIONS
-COMPUTER PHERIHERALS
APPLICATION USE
FLOPPY DISC POSITION MAGNETIC
PICKUP
PRINTER ROTATE CHAR ACTER
WHEEL , CARRIAGE
DRIVE, PAPER FEED
PLOTTER X-Y-Z POSTIONING ,
PAPER FEED

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 22/40
BUSINESS MACHINES
APPLICATION USE
Card Reader position cards
Banking Systems credit card positioning , paper feed
Card Sorter route card flow
8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 23/40
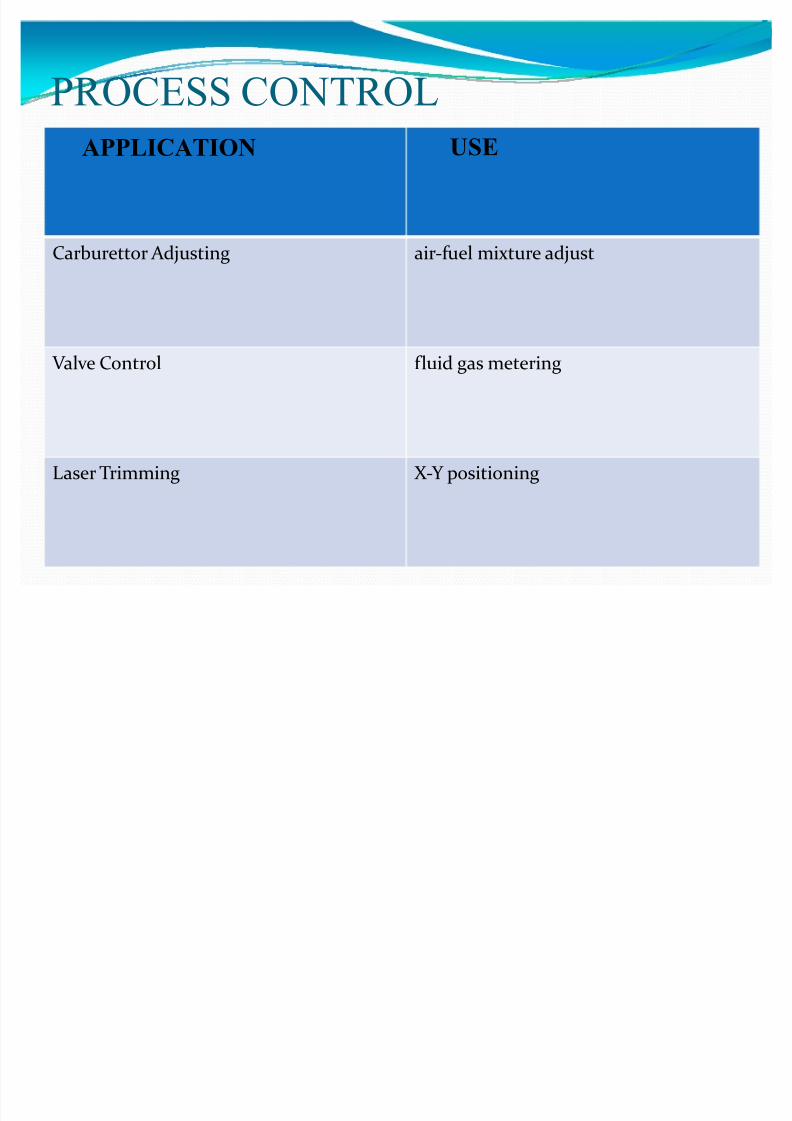
PROCESS CONTROL
APPLICATION USE
Carburettor Adjusting air-fuel mixture adjust
V alve Control fluid gas metering
Laser Trimming X-Y positioning
8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 24/40
STEPPER MOTOR SPECIFICATIONS
y PHASE :
This term refer s to the number of independent windings on the
stator . E.g. a four phase motor
y STEP A NGLE:
This is the angle through which the rotor for one switching
change for the stator coils .
y HOLDING TORQUE :
This is the maximum torque that can be applied to a powered
motor without moving it from its rest position and causing s pindlerotation
y PULL-IN TORQUE :
This is the maximum torque against which a motor will start ,
for a given pulse rate , and reach synchronism without losing a step .

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 25/40
Contd
y PULL- UT TORQUE :
This is the a imum t r ue that ca e a lie t a motor ,r unning at a given ste ing rate , ithout losing s nchr onism.
y PULL-I RATE :
This is the ma imum switching rate at which a loa e
motor can start without losing a ste .
y PULL-OUT RATE :
This is the switching rate at which a loa e motor will
remain in s nchr onism as the switching rate is re uce .y SLEW RANGE :
This is the range of switching rates etween ull-in and ull-out within which the motor r uns in s nchr onism ut cannot start
up or rever se .

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 26/40
TORQUE
SPEED
PULLIN
SPEED
PULLOUTSPEED
MAX
PULLIN
SPEED
MAX
PULLOUT
SPEED
SLEW
RANGE
CHARACTERSTICS OF
STEPPER MOTOR

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 27/40
MOTORSy DC MOTORS
y AC MOTORS
8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 28/40
MOTOR PRINCIPLEy The Motor Principle: when a current-carrying conductor is
located in an external magnetic field perpendicular to theconductor, the conductor experiences a force perpendicularto itself and to the external magnetic field.
y The right-hand rule for force on a conductor can be used todetermine the direction of the force experienced on theconductor: if the right thumb points in the direction of thecurrent in the conductor and the fingers of the right hand
point in the direction of the external magnetic field, then theforce on the conductor is directed outward from the palm of the right hand.

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 29/40
PRINCIPLE

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 30/40
DC MOTOR WORKING

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 31/40
AC MOTOR

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 32/40
TYPES OF A.C MOTORS
y Single Phase Squirrel-cage induction motor
y Three Phase Induction motor
y Synchronous motor

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 33/40
SINGLE PHASE SQ UIRREL CAGE
INDUCTION MOTORy This motor consists of a squirrel-cage rotor, this being
copper or aluminium bars that fit into slots in end
rings to form complete electrical connections.y The basic motor consists of this rotor with a stator
having a set of windings.
y WORKING: When an a.c passes through the stator
windings an alternating magnetic field is produced. Asa result e.m.f is induced in the conductors of the rotorand current flow in the rotor.

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 34/40

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 35/40
y The motor is not self starting.
y A number of methods are used to make the motor self starting and give this initial impetus to start it; one is
to use an auxiliary starting winding to give rotor aninitial push.
y The motor runs at a speed determined by thefrequency of the a.c applied to the stator.
y For a constant frequency supply to a two-pole single-phase motor the magnetic field will alternate at thisfrequency. This speed of rotation of the magnetic fieldis termed the synchronous speed.

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 36/40
THREE PHASE INDUCTION MOTORy It is similar to single-phase induction motor but has a
stator with three windings located 120 degrees apart,each winding being connected to one of the three linesof the supply.
y Because the three phases reach their maximum
currents at different times, the magnetic field can beconsidered to rotate round the stator poles,completing one rotation in one full cycle of thecurrent.

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 37/40

8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 38/40
y The three phase motor has a great advantage over thesingle phase motor of being self-starting.
y The direction of rotation is reversed by interchangingany two of the line connections, this changing thedirection of rotation of the magnetic field.
8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 39/40
SYNCHRONOUS MOTORSy Synchronous motors have stators similar to those described
above for induction motors but a rotor which is apermanent magnet.
y The magnetic field produced by the stator rotates and sothe magnet rotates with it.
y
With one pair of poles per phase of the supply, themagnetic field rotates through 360 degrees in one cycle of the supply and so the frequency of rotation with thisarrangement is the same as the frequency of the supply.
8/8/2019 stepper miotor
http://slidepdf.com/reader/full/stepper-miotor 40/40
y Synchronous motors are used when a precise speed isrequired.
y They are not self starting and some system has to beemployed to start them.