tracking mobile sensor nodes in wildlife francine lalooses hengky susanto ee194-professor chang
TRANSCRIPT
Tracking Mobile Sensor Nodes in Wildlife
Francine Lalooses
Hengky Susanto
EE194-Professor Chang

Outline
Recap Tracking with Binary Sensor Network Distributed Predictive Tracking Algorithm Our Tracking Approach Future Work References
Recap
Sensors only monitor land animals Animals are tagged Sensors placed at certain location Better understanding of region/animal
relationship Not specific to animal size or velocity

Tracking with Binary Sensor Network
Assumptions: Sensors have only one bit of information Sensors broadcast bit to base station (BS) Proximity sensor requires one more bit
One bit of information gives accurate predictions about direction of motion Approaching (+) Moving away (-)
Simple broadcast protocol
Tracking a Moving Object with a Binary Sensor Network, Dartmouth College.

Binary Sensor Network Geometry
Future position lies: Inside plus sensor overlap (+) Outside minus sensor (-)
+ +
-

Tracking with a Proximity Bit
Simulation results Estimated trajectory (star – dashed line) Actual trajectory (triangle – line) Plus sensors (squares) Minus sensors (circles)
Object gets in range at time 3

Binary Sensor Summary
Advantages: Trajectory prediction error is low Broadcasting single bits over network feasible BS computation is fast
Disadvantages: Only tracks one animal at a time No consideration for energy efficiency No failure recovery model

What if . . .
Tracking Algorithm: Low Duty Cycle

Distributed Predictive Tracking Algorithm
No central point Cluster based architecture Assumptions:
Randomly distributed sensors Default to normal beam Hibernation mode
Predictive mechanism Cluster head activates appropriate sensors
before target arrives
A Protocol for Tracking Mobile Targets using Sensor Networks, RPI

DPT: Target Descriptor Formulation
Target descriptor (TD) consists of: Target’s identity
Unique Created when target first
detected Target’s present location
Sensor triplet triangulation Target’s next predicted location
Alerts CHs most likely approached
Linear predictor Time stamp
Time TD created

DPT: Sensor Selection Algorithm
Prediction: When CHi predicts target location, downstream
CHi+1 receives message CHi+1 has information of all sensors in cluster
Selection: CHi+1 locally decides sensor-triplet to sense
target and sends wake-up message Each sensor sends location message to CHi+1
CHi+1 formulates TDi+1
CH CHi+1 CHi+2
CH = cluster head TD = target description
downstreamupstream

DPT: Failure Recovery
Failure: If upstream CH does not receive confirmation
from downstream CH, assumes downstream CH is not available and target lost
Target changes direction or speed and moves away from predicted location
Recovery: Wake up all sensors
within area Calculated from target’s
previous actual location

DPT: Energy Considerations
Sensor-hibernation method Most sensors stay in hibernation mode Only chosen sensors become active
Energy for obtaining TD of one location
Keep pmiss small to minimize energy consumed for recovery
Energy consumed in failure recovery
Failures cause extra communication between clusters and sensors
Etotal = (1 - pmiss) Esuccess + pmiss Efailure
Efailure = Esuccess + 3EHBPHB + (1-PHB)(3EHB+C)

Our Tracking Approach Nature
Cluster based algorithm Hierarchical approach
Variables: distance = E[velocityrunning] * time
CH CH
d
d
CH
First level CH
Master CH

Our Tracking Algorithm
Calculation based on maximum hop and popularity
Variables: h = CH hop count
2d
1h
4h
2h
Lost region

Our Intuition
Accuracy finding lost target improves over time More information = better search boundary Error handling wakes up all nodes in region of
diameter 2*d Advantages over sweeping across region:
More energy efficient Less network traffic
Sweeping Across the Region
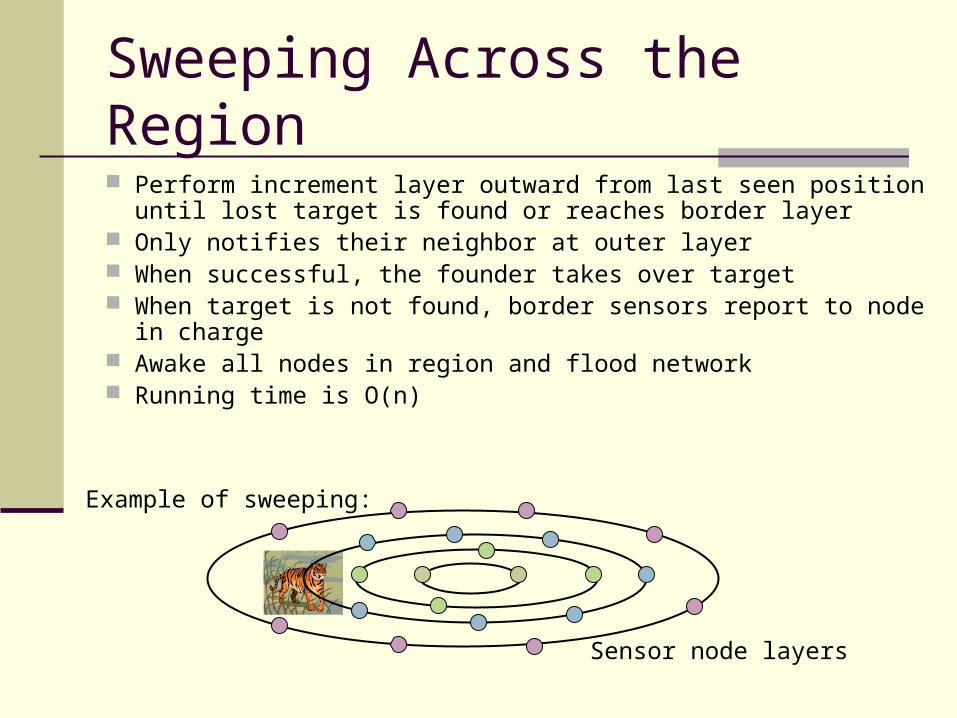
Perform increment layer outward from last seen position until lost target is found or reaches border layer
Only notifies their neighbor at outer layer When successful, the founder takes over target When target is not found, border sensors report to node in
charge Awake all nodes in region and flood network Running time is O(n)
Sensor node layers
Example of sweeping:

Future Work
Failure and recovery algorithm Further develop our algorithm Compare DPT with our algorithm
Performance Energy efficiency Error handling
References
A Protocol for Tracking Mobile Targets using Sensor Networks. H. Yang and B. Sikdar. RPI.
Tracking a Moving Object with a Binary Sensor Network. J. Aslam, Z. Butler, F. Constantin, V. Crespi, G. Cybenko, D. Rus. Dartmouth College, CSU Los Angeles.
Rumor Routing Algorithm for Sensor Networks. D. Braginsky, D. Estrin. UCLA.
The ACQUIRE Mechanism for Efficient Querying in sensor Networks. N Sadagopan, A Helmy. USC.
Distribute Online localization in Sensor Networks Using a Moving Target. A Galstyan, K Lerman, S Pattem. USC.
Distributed Target Classification and Tracking in Sensor Networks. R. R. Brooks, P Ramanathan, A Sayeed. Penn State University and University of Wisconsin.
Detecting Moving Radioactive Source Using Sensor Networks. D Stephens, A Peurrung. Pacific National Laboratory.

Questions