twitch plays ece477 ece 477 design review team 1 − spring 2015 hannan harlan root tornquist
TRANSCRIPT

Twitch Plays ECE477ECE 477 Design Review Team 1 − Spring 2015
Hannan Harlan Root Tornquist

Outline• Project overview • Project-specific success criteria• Block diagram• Component selection rationale• Packaging design• Schematic and theory of operation• PCB layout• Software design/development status• Project completion timeline• Questions / discussion

Project OverviewTwitch Plays ECE477 is a Collaborative
Robotics Project
Twitch Plays
ECE477
Team 1
Team 2

Project Specific Success Criteria1. An ability to receive video from a camera via UART and transmit data via
WiFi to a PC.
2. An ability for a robot to receive and decode commands from a webserver over WiFi.
3. An ability for the microcontroller to direct motor speed and direction based on a desired movement operation (forward, backwards, rotate, kick).
4. An ability for a webserver to receive commands from users on the internet, enqueue the commands, and send them to the robots at a human playable rate. (Low delay between commands, but enough time for human to respond).
5. An ability to track the game score via sensors on goals and display the score both on the field of play and on the video feeds. (Note: This will be done via a raspberry PI).

Block DiagramVideo
Subsystem
Goal Sensors
Router Webserver
WiFiModule
Camera Module
Motor Controller
Score Display

Mechanical Design

Component Selection Rationale● Microcontroller● Motors● Camera● WiFi● Power

Component: Microcontroller
Requirements:● Memory for JPEG Frame (~1.14 MB 640*480)● 2 UART (Camera and WiFi)● 3 PWM● 2 GPIO (Motor Direction)
PIC32MZ2048ECM064 meets these requirements
Component: Motors
Stepper● Harder to Control● More Costly● High Precision
Brushed DC● Easy to Control● Cheap● Low Precision

Component: Camera
Omnivision OV9715● SCCB Interface● 10-bit RAW RGB
uCAM II● UART Interface● JPEG Images● 3.3v Logic

Component: WiFi
RN171● Integrated TCP/IP● Packaged Solution● ASCII Input● UART
MRF24WG0MA● Off Chip Stack● High Control● SPI

Component: Power
Tether● Limited
Motion● Constant
Power
Battery● Full
Motion● Limited
Power
Bumper-Car Style● Full
Motion● Constant
Power

Packaging Design - Field
Playing Field / Enclosure - 48” x 48” x 12”

Packaging Design - Robot
Isometric View Back View Chassis

Software Components

CommunicationMap

Embedded Operations
Initialize Camera Logic
Command Logic

Embedded Operations

Command System Response
System
IRC Bot
Redis Server (Resque Queue)

Command System

Video FeedGenerate Image Feed
Broadcast Twitch Data
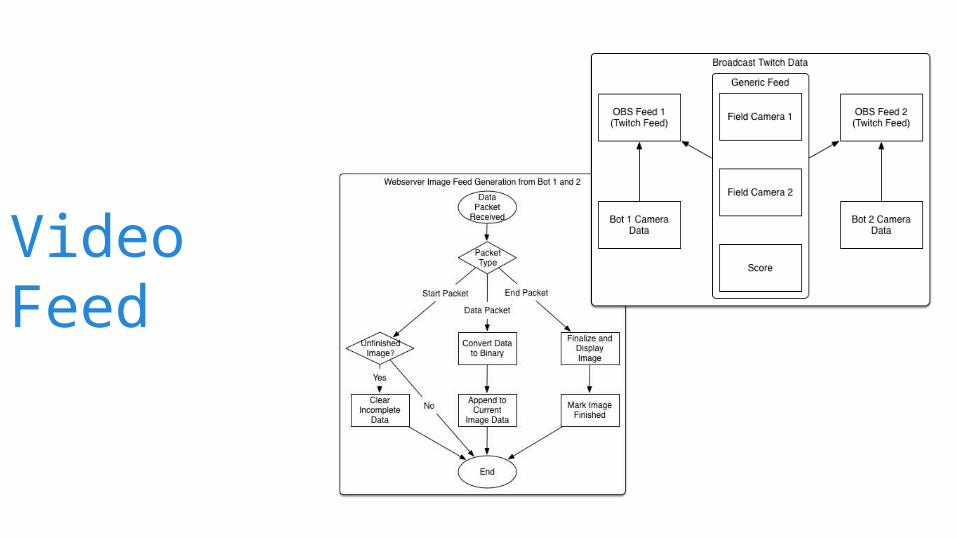
Video Feed

Scoring System
Raspberry Pi PC

Scoring System

PCB
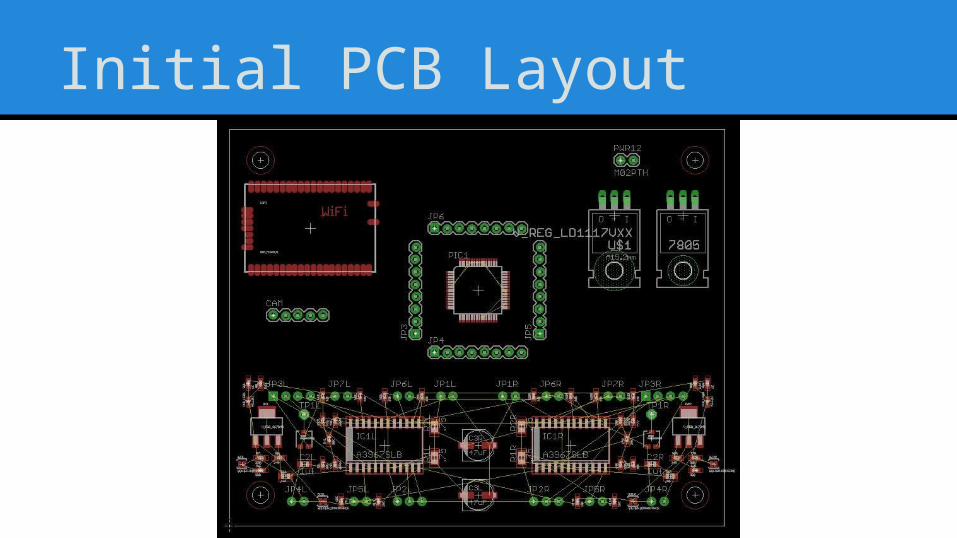
Initial PCB Layout

PCB Layout v1.0

PCB Layout v2.0

Layout Comparison

Project Status

Software Development Status
Webcam Control
WiFi Control
Webcam to WiFi
Request Command
Execute Command
IRC Bot
Command Queue
Receive Image
Send Command
Frontend for
Stream
Webcam Server
Score Display
Score Change
Score Tracking
Score Trigger
Microcontroller Webserver Raspberry Pi
Not Started
In Progress
Complete

Project Completion Timeline
Weekly Goals:Week 9: Pic32 WiFi and camera logicWeek 11: Complete Software InteractionsWeek 12: Build Robot and FieldWeek 13: Testing/Turn in Early
Week 14: Testing/Turn in EarlyWeek 15: Testing/Turn in EarlyWeek 16: Showcase

Questions?