universidade federal rural do semi-Árido campus angicos curso de bacharelado em ciÊncia e … -...
TRANSCRIPT

UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO
CAMPUS ANGICOS
CURSO DE BACHARELADO EM CIÊNCIA E TECNOLOGIA
JOSE BRUNO CANUTO CAMARA
ESTUDO DO POLINÔMIO CARACTERÍSTICO ATRAVÉS DOS MÉTODOS DE
LEVERRIER E LEVERRIER-FADDEEV
ANGICOS-RN
2013

JOSE BRUNO CANUTO CAMARA
ESTUDO DO POLINÔMIO CARACTERÍSTICO ATRAVÉS DOS MÉTODOS DE
LEVERRIER E LEVERRIER-FADDEEV
Trabalho de Conclusão de Curso apresentado à
Universidade Federal Rural do Semi-Árido –
UFERSA, Departamento de Ciências Exatas e
Naturais para obtenção do título de Bacharel
em Ciência e Tecnologia.
Orientador: Prof. M. Sc. Ivan Mezzomo –
UFERSA
ANGICOS-RN
2013

Catalogação na Fonte
Biblioteca Universitária Campus Angicos (BCA-UFERSA)
C172e Camara, José Bruno Canuto. Estudo do polinômio característico através dos métodos de Leverrier e Leverrier-Faddeev / José Bruno Canuto Camara. - Angicos: Ufersa, 2013. 63 f.; il. Monografia (Graduação em Ciência e Tecnologia) –
Universidade Federal Rural do Semi-Árido. Campus Angicos.
Orientador: Prof. M. Sc. Ivan Mezzomo.
1. Álgebra Linear. 2. Polinômio Característico. 3.Leverrier. 4. Leverrier-Faddeev I. Título.
RN/UFERSA/BCA CDD 512.5 Ficha Catalográfica elaborada pela Bibliotecária-Documentalista
Rebeka Mª de Carvalho Santos Godeiro – CRB 15/432


DEDICATÓRIA
A minha mãe FRANCISCA CÂMARA e meu
pai SEBASTIÃO CÂMARA que sempre
apoiou e incentivou meus estudos mesmo em
momentos difíceis. Vocês são a minha vida.

AGRADECIMENTOS
Quero manifestar todo meu agradecimento a todos que de forma direta ou
indiretamente colaboraram para que este trabalho se concretizasse;
Em primeiro lugar, toda a minha gratidão a DEUS que, por sua graça, me fez vitorioso
em mais esta etapa na minha vida, minha dando a força necessária para superar todas as
dificuldades.
Agradeço a minha família pelo apoio e incentivo, especialmente minha mãe Francisca
Câmara, meu pai Sebastião Câmara pelo amor incondicional durante toda a minha vida, a
minha irmã Brunyelle Câmara e meu cunhado Rafael Medeiros.
Aos meus avos amados Pedro Canuto, Rita Canuto e Matilde Brito pelos bons
testemunhos de vida e conselhos, me ensinando a verdadeira conduta durante vida;
A meus amigos e colegas do curso pelos bons momentos de diversão e estudo que
passamos juntos. Em especial à Lisarb Brasil, Igor Lima, Anderson Carlos, Joseane Azevedo,
Felipe Jales, Caio Augusto, Ítalo Sabino, Dylson Junyer, Felipe Andrade;
Agradeço a todos os professores do corpo docente da UFERSA, pelos
conhecimentos passados durante o curso. Em especial a Matheus Menezes, Gustavo
Rebouças, Enai Taveira, Marcilene Nóbrega, Núbia, Wivaldo, Márcio Furukava e Alex
Araújo.
Agradeço ao professor Matheus Menezes por todo o seu apoio, amizade, incentivo e
conhecimento passado que foi de fundamental importância durante o curso e a realização
desse trabalho.
Sempre passou pela minha mente um dia trabalhar como docente, tenho sem sombra
de duvidas profissionais de excelência para me espelhar: Matheus Menezes, Ivan Mezzomo,
Enai Taveira, Gustavo Rebouças e Alex Araújo.
E principalmente minha gratidão ao meu orientador Ivan Mezzomo por todo
conhecimento passado desde a disciplina de álgebra linear passando por introdução às funções
de várias variáveis até agora, tenho você como um amigo e espelho como um ser humano e
profissional. Muito obrigado pela orientação, por ter tanta paciência, dedicação. Você é uma
pessoa fantástica, muito inteligente, muito obrigado mesmo;
A todos os meus amigos (as) tanto em Angicos/RN quanto em João Câmara/RN que
sempre presentes no meu dia a dia, me deram apoio, me desejaram força e muito sucesso,
agradeço muito por acreditarem nesta realização;

“Sempre me pareceu estranho que todos
aqueles que estudam seriamente esta ciência (a
matemática) acabam tomados de uma espécie
de paixão por ela. Em verdade, o que
proporciona o máximo prazer não é o
conhecimento e, sim, a aprendizagem, não é a
posse, mas a aquisição; não é a presença, mas
o ato de atingir a meta.”
(Carl Friedrich Gauss)

RESUMO
Este trabalho tem como objetivo apresentar um estudo do polinômio característico
através dos métodos de Leverrier e Leverrier-Faddeev. O presente trabalho é de caráter
bibliográfico, onde através da literatura usualmente utilizada nos cursos de álgebra linear e
calculo numérico abordaremos o conteúdo. Enfatizaremos a importância do tema abordado
para análise de alguns problemas relacionados à engenharia. Relembraremos alguns conceitos
básicos, que irão ser de suma importância para a compreensão dos métodos numéricos
apresentados. No presente trabalho, também, serão abordados aspectos teóricos e práticos
relativos aos métodos de Leverrier, Leverrier-Faddeev e através de exemplos, buscaremos o
conhecimento prático e didático. Analisamos também, a estratégia de cálculo do polinômio
característico e seus autovalores através dos métodos numéricos estudados, discutindo o
procedimento. E finalmente veremos, a aplicação computacional dos métodos de Leverrier e
Leverrier-Faddeev em uma determinada matriz utilizando um algoritmo para cada método no
software SCILAB 5.4.1.
Palavras-chave: Álgebra linear. Polinômio característico. Leverrier. Leverrier-Faddeev.
Autovalores.
LISTA DE FIGURAS
Figura 1 - Processo 1 de determinação dos autovalores através do SCILAB ..................47
Figura 2 - Processo 2 de determinação dos autovalores através do SCILAB ..................49
Figura 3 - Algoritmo utilizado para o método de Leverrier ...............................................54
Figura 4 - Processo 3 de determinação dos autovalores através do SCILAB ..................56
Figura 5 - Algoritmo utilizado para o método de Leverrier-Faddeev ...............................57
Figura 6 - Processo 4 de determinação dos autovalores através do SCILAB ..................60

SUMÁRIO
1 INTRODUÇÃO .................................................................................................................. ..........11 1.1 JUSTIFICATIVA ..................................................................................................................12
1.2 OBJETIVOS DO ESTUDO ..................................................................................................12
1.2.1 Objetivo geral .................................................................................................................12
1.2.2 Objetivo específico ..........................................................................................................12
1.3 METODOLOGIA .................................................................................................................13
2 PRELIMINARES ........................................................................................................................14 2.1 MATRIZES ...........................................................................................................................14
2.1.1 Definição .........................................................................................................................14
2.1.2 Tipos de Matrizes............................................................................................................16
2.1.3 Operações com Matrizes ................................................................................................16
2.1.3.1 Adição e Subtração..................................................................................................17
2.1.3.2 Produto de uma matriz por um escalar ..................................................................17
2.1.3.3 Produto de Matrizes ................................................................................................17
2.2 DETERMINANTES ..............................................................................................................19
2.2.1 Permutação .....................................................................................................................19
2.2.2 Determinante de uma Matriz .........................................................................................19
2.2.3 Cálculo do determinante de terceira ordem ..................................................................20
2.2.4 Propriedades dos determinantes ....................................................................................22
2.2.5 Cálculo de um determinante de qualquer ordem ..........................................................23
2.2.6 Matriz Inversa e Matrizes Semelhantes .........................................................................23
2.3 EQUAÇÕES POLINÔMIAIS E DETERMINAÇÃO DAS RAÍZES REAIS .....................24
2.3.1 Equações Polinomiais .....................................................................................................24
2.3.2 Determinação das Raízes Reais ......................................................................................26
2.4 SISTEMAS DE EQUAÇÕES LINEARES ...........................................................................28
2.5 VETORES .............................................................................................................................28
2.6 ESPAÇOS VETORIAIS .......................................................................................................29
2.6.1 Definição .........................................................................................................................29
2.6.2 Subespaços Vetoriais ......................................................................................................30
2.6.3 Combinação Linear e Subespaços Gerados ...................................................................31
2.6.4 Dependência e Independência Linear ............................................................................32
2.6.5 Base e Dimensão .............................................................................................................32
2.6.6 Transformações Lineares ...............................................................................................33
2.7 POLINÔMIO CARACTERÍSTICO ....................................................................................34
2.8 AUTOVALORES E AUTOVETORES ................................................................................35
3 MÉTODOS NUMÉRICOS PARA DO POLINÔMIO CARACTERÍSTICO SEUS
AUTOVALORES............................................................................................................................38
3.1 INTRODUÇÃO .....................................................................................................................38

3.2 MÉTODO DE LEVERRIER ................................................................................................40
3.3 MÉTODO DE LEVERRIER-FADDEEV ............................................................................41
4 RESULTADOS E DISCUSSÕES ................................................................................................45
5 EXPERIMENTO COMPUTACIONAL .....................................................................................54
6 CONSIDERAÇÕES FINAIS .......................................................................................................62 REFERÊNCIAS ..............................................................................................................................63
11
1 INTRODUÇÃO
Costumeiramente, quando estudamos assuntos relacionados às áreas da ciência e
engenharia, nos deparamos com equações polinomiais. O estudo do polinômio característico
de uma matriz de ordem e seus correspondentes autovalores estão presentes em diferentes
ramos da matemática. O polinômio característico está relacionado a formas quadráticas,
sistemas diferenciais, problemas de otimização não linear, e podem ser usados para resolver
problemas de diversos campos, como economia, teoria da informação, análise estrutural,
eletrônica, teoria de controle e muitos outros (FRANCO, 2006 p. 203).
Quando se estuda, por exemplo, a utilização de autovalores e autovetores do
polinômio característico no problema de fluxo de potencia para a determinação de áreas de
controle de tensão, nota-se que a análise de autovalores da matriz jacobiana próximo ao ponto
de colapso de tensão, pode ser usada para identificar barras vulneráveis e pontos onde
injeções de potência reativa trazem beneficio ao sistema, de acordo com (HENRIQUES, 2009
p.24).
Este trabalho é dedicado a um estudo do polinômio característico através dos métodos
de Leverrier e Leverrier-Faddev. Veremos que é de fundamental importância o estudo dos
métodos numéricos para otimização de diversos cálculos, pois minimizam o consumo de
tempo e processamento.
Preocuparemo-nos inicialmente em apresentar conceitos e teoremas relacionados a
álgebra linear, abordando assuntos relacionados às raízes polinomiais bem como o polinômio
característico e seus autovalores. Abordaremos conceitos fundamentais na compreensão de
autovalores, onde apresentaremos aspectos teóricos e práticos aos métodos de Leverrier e de
Leverrier-Faddeev que fundamentam o polinômio característico. Abordaremos também
definições, características e propriedades de zeros reais de funções polinomiais utilizando
métodos para a determinação dos autovalores associados ao polinômio característico.
Finalmente definiremos um algoritmo para utilização no software SCILAB, de forma a tentar
automatizar parte do processamento numérico dos resultados referentes ao assunto.

12
1.1 JUSTIFICATIVA
.
De acordo com os comentários abordados anteriormente, fica evidente a importância
do estudo do polinômio característico através dos métodos de Leverrier e Leverrier-Faddeev,
pois além de seu interesse teórico inerente, possui uma vasta aplicação prática em inúmeras
áreas relacionadas.
1.2 OBJETIVOS DO ESTUDO
Levando-se em consideração todos os comentários e preceitos estabelecidos acima, o
presente trabalho foi desenvolvido visando alcançar os seguintes objetivos.
1.2.1 Objetivo geral
Propor uma revisão bibliográfica sobre o estudo do polinômio característico através
dos métodos de Leverrier e Leverrier-Faddeev, disponível na literatura e estudar sua aplicação
em alguns problemas numéricos.
1.2.2 Objetivo específico
Abordar conceitos relacionados a polinômio característico.
Abordar teoremas relacionados às raízes polinomiais.
Abordar aspectos teóricos e práticos relacionados a zeros reais de funções polinomiais.
Abordar aspectos teóricos e práticos relacionados aos métodos de Leverrier e
Leverrier-Faddeev.
Abordar aspectos teóricos e práticos da obtenção dos autovalores a partir do polinômio
característico.
Analisar a utilização do polinômio característico e os autovalores em exemplos
numéricos.

13
1.3 METODOLOGIA
O presente trabalho foi desenvolvido através de uma pesquisa exclusivamente
bibliográfica sobre o estudo do polinômio característico através dos métodos de Leverrier e
Leverrier-Faddeev e aplicações, embasado na literatura acadêmica da área específica, com a
finalidade de se obter o conhecimento do assunto abordado visando o funcionamento e
aplicações.
Este trabalho está constituído e organizado de acordo com consequente formação
metodológica. No capítulo 1, apresentamos a organização metodológica, justificativas e
objetivo do estudo. No capítulo 2, temos a fundamentação teórica matemática que nos dará
apoio aos assuntos focos que serão provenientes estudados. Nos capítulos 3, 4 e 5,
abordaremos os métodos de Leverrier e Leverrier-Faddev, aspectos teóricos, resultados e
experimento computacional, respectivamente. E enfim, no capítulo 6, apresentaremos as
conclusões em relação ao assunto estudado.

14
2 PRELIMINARES
Com o objetivo de facilitar o entendimento deste trabalho é indispensável um
conhecimento prévio sobre alguns conceitos de álgebra linear e calculo numérico, tais como
matrizes, determinantes, equações polinomiais, determinação de zeros reais de funções
polinomiais, sistemas de equações lineares, vetores, espaço vetorial, polinômio característico
e autovalores. Sendo assim, neste capítulo revisaremos de forma breve estes conceitos,
relacionando-os ao conteúdo base o trabalho.
2.1 MATRIZES
Nessa seção 2.1 e na seção 2.2 iremos definir, classificar, introduzir propriedades e
operações relacionadas à matrizes e determinantes. Todas as definições foram embasadas de
acordo com Steinbruch (2010) e Boldrini (1986).
2.1.1 Definição
Uma matriz de ordem por é uma tabela de elementos arranjados em
linhas e colunas, onde e são dois números inteiros. Representamos
uma matriz de linhas e colunas por:
[
]
Os elementos da matriz são representados por , onde é um índice que indica a
linha e o índice indica a coluna em que o elemento esta disposto na matriz. Cada elemento
que forma uma matriz é chamado de termo dessa matriz.
Representamos a matriz de ordem por da forma . Isto é, se uma matriz
tiver 3 linhas e 4 colunas, escrevemos e dizemos que a matriz é de ordem 3 por 4.
15
Para duas matrizes e serem iguais,
, devemos ter o mesmo número de linhas e colunas , além disso, todos seus
elementos iguais = .
2.1.2 Tipos de Matrizes
Segundo Boldrini (1986, p. 3) ao trabalhar com matrizes, observamos que existem
algumas que, seja pela quantidade de linhas ou colunas, ou ainda, pela natureza de seus
elementos, têm propriedades que as diferenciam de uma matriz qualquer. Além disso, estes
tipos de matrizes aparecem frequentemente na prática e, por isso, recebem nomes especiais.
Seja uma matriz em que , ou seja, o número de linhas é igual ao numero de
colunas ( ), chamamos essa matriz de quadrada. Neste caso, dizemos que a matriz tem
ordem . Seja uma matriz em que , chamamos essa de matriz retangular.
Dada a matriz quadrada ,
[
]
Os elementos , em que , formam a diagonal principal e é composta pelos
elementos . Já no caso de os elementos , no qual , compõem a
diagonal secundária e é constituída pelos elementos . Para uma matriz
quadrada onde para , e elementos em que para , , chamamos de
matriz diagonal.
Quando uma matriz tiver elementos , para todo e , denominamos matriz
nula. Se a matriz possuir apenas uma coluna ( ), chamamos de matriz coluna. Já a
matriz em que é intitulada como matriz linha. Para uma matriz quadrada em que
e , para definimos como matriz identidade .

16
Denominamos matriz superior àquela matriz em que todos os elementos abaixo da
diagonal principal são nulos, ou seja, e , para . Já no caso em que todos os
elementos acima da diagonal principal são nulos, chamamos esta de matriz inferior.
Dada uma matriz , chamamos de matriz transposta (representada por AT) a
seguinte matriz , tal que A
T = , onde [ ] . Isto é, uma matriz A
T tal que as
linhas são as colunas de . Nas propriedades da matriz transposta temos:
I)
II)
III)
IV)
onde é um escalar qualquer.
Uma matriz quadrada é simétrica se , onde é igual a e
. Se multiplicarmos uma matriz quadrada pela sua transposta AT obtemos uma
matriz simétrica.
Uma matriz , em que , é denominada de matriz antissimétrica e os
elementos da diagonal principal serão nulos.
2.1.3 Operações com Matrizes
2.1.3.1 Adição e Subtração
Dadas duas matrizes e de ordem , a soma ou subtração
indicada por é uma nova matriz , tal que . Só podem ocorrer operações
de soma e subtração se as matrizes forem de mesma ordem. Representamos uma matriz
soma ou subtração de por:
[
] [
] [
]

17
A adição e subtração de matrizes têm como propriedades:
I.
II.
III.
IV.
2.1.3.2 Produto de uma matriz por um escalar
Dada uma matriz , o produto de por um escalar qualquer
originará numa matriz em que: . Sejam e escalares, e matrizes
e , então temos como propriedades do produto de uma matriz por um escalar:
I.
II.
III.
IV.
2.1.3.3 Produto de Matrizes
A multiplicação de duas matrizes qualquer resultará em uma matriz
, tal que a matriz terá o mesmo número de linhas da matriz e o mesmo
número de colunas da matriz , é importante lembrar que necessário que o número de
colunas de seja igual ao número de linhas de . Definidas duas matrizes e
, o produto é obtido da seguinte forma:
Propriedades da multiplicação de matrizes de acordo com Steinbruch (2010):
I) Definidas as matrizes , , , tem-se:

18
II) Definidas as matrizes , , , tem-se:
III) Definidas as matrizes , , , tem-se:
IV) Se , tem-se:
V) Definidas as matrizes e , tem-se, para todo número :
VI) A multiplicação matricial não é, em geral, comutativa, isto é, onde
e tem a mesma ordem.
VII) Definidas duas matrizes e , se o produto delas for a matriz zero [0],
não é necessário que ou sejam matrizes zero.
Dada duas matrizes quadradas e de ordem , ao multiplicar e obteríamos
resultados, em geral, diferentes. Se na multiplicação de ou for igual a uma matriz
identidade , indicamos que é inversa de (denotado por ). Para uma matriz identidade
de ordem , o produto ou é igual a matriz .
2.2 DETERMINANTES
2.2.1 Permutação
Dado um conjunto de inteiros { } uma permutação é um reorganização destes
inteiros em alguma ordem sem exclusão ou repetições.
19
A quantidade de permutações permitidas para um conjunto { } é dado por
, isto é:
Dada uma permutação desses três elementos e assumindo que a permutação
principal da permutação seja dizemos que dois elementos de uma permutação estão
em ordem inversa a da permutação principal quando eles geram uma inversão. Nesse caso,
observamos que e formam uma inversão. Dependendo de que uma permutação apresente
um número ímpar ou par de inversões, essa é chamada de classe ímpar ou de classe par
respectivamente.
2.2.2 Determinante de uma matriz
Dada uma matriz quadrada, de ordem , o produto dos elementos da diagonal
principal é denominado termo principal, ao passo que o produto dos elementos da diagonal
secundaria é chamado de termo secundário.
Segundo Steinbruch (2010, p. 421)
Chama-se determinante de uma matriz quadrada à soma algébrica dos
produtos que se obtém efetuando todas as permutações dos segundos índices
do termo principal, fixados os primeiros índices, e fazendo-se preceder os
produtos do sinal + ou -, conforme a permutação dos segundos índices seja
de classe par ou de classe ímpar.
A ordem de uma matriz indicará a ordem do polinômio que define seu determinante,
se o determinante tem ordem , por exemplo, a matriz correspondente também terá ordem
igual a .
Representamos o determinante de uma matriz por , colocando os elementos
da matriz entre dois traços verticais, da seguinte forma:

20
|
|
O cálculo do determinante de uma matriz de ordem é feito subtraindo o termo
principal do termo secundário. Logo, tem-se:
|
|
2.2.3 Cálculo do determinante de terceira ordem
Seja uma matriz de ordem , da seguinte forma:
[
]
Calculamos o determinante da matriz
|
|
pela definição de determinantes de matrizes. Logo:
Outro modo para calcular o determinante de uma matriz de ordem é através da regra
de Sarrus. Essa regra diz que para obter o determinante de uma matriz, basta repetir as duas
colunas à direita do determinante. Depois disso, precisa-se somar os produtos da diagonal
principal e das outras duas paralelas formadas a diagonal principal, e finalmente, subtrair os
produtos da diagonal secundária e das outras duas paralelas a diagonal secundaria:
|
|
21
Pode-se escrever de outra maneira a fórmula para calcular o determinante de uma
matriz de ordem 3 que é denominado desenvolvimento do determinante pela 1ª linha. Essa
formula é obtida efetuando quatro passos simples, no primeiro multiplica-se o componente
pelo determinante menor da submatriz de , que se obtém eliminando a 1ª linha e a 1ª
coluna. No segundo e terceiro passo realiza o mesmo procedimento para os elementos e
. E por ultimo, no quarto passo efetua os três produtos resultantes serem antecedidos
alternadamente pelos sinais + e , começando pelo sinal +:
|
| |
| |
| |
|
Nota: O calculo do determinante de uma matriz pode ser efetuado por qualquer coluna
ou linha certificando-se que a alternância dos sinais é e dos produtos por linha e a
alternância dos sinais por coluna é:
Através desse método pode-se calcular determinante de uma matriz de ordem quatro
ou de ordem . Todavia quanto maior a ordem da matriz maior também será o número de
operações efetuadas, podendo torna-la inviável.
2.2.4 Propriedades dos determinantes
A seguir apresentaremos as propriedades dos determinantes de acordo com Steinbruch
(2010):
I) O determinante de uma matriz não se altera quando se trocam as linhas pelas
colunas.

22
II) Se a matriz possui uma linha (ou coluna) constituída de elementos todos
nulos, o determinante é nulo.
III) Se a matriz tem duas linhas (ou duas colunas) iguais, o determinante é nulo.
IV) Se na matriz duas linhas (ou colunas) têm seus elementos correspondentes
proporcionais, o determinante é nulo (numa matriz , dois elementos são
correspondentes quando, situados em linhas diferentes, estão na mesma coluna,
ou quando, situados em colunas diferentes, estão na mesma linha):
|
|
V) Se na matriz cada elemento de uma linha (ou coluna) é uma soma de duas
parcelas, o determinante de pode ser expresso sob a forma de uma soma dos
determinantes de duas matrizes, a saber:
|
| |
| |
|
VI) O determinante de uma matriz triangular (superior ou inferior) é igual ao
termo principal, isto é, é igual ao produto dos elementos da diagonal principal.
VII) Trocando-se entre si duas linhas (ou colunas) da matriz , o determinante
muda de sinal.
VIII) Quando se multiplicam por um número real todos os elementos de uma linha
(ou de uma coluna) da matriz , o determinante fica multiplicado por esse
número.
IX) Um determinante não se altera quando se somam aos elementos de uma linha
(coluna) da matriz os elementos correspondentes de outra linha (coluna)
previamente multiplicados por um número real diferente de zero:
|
| |
|

23
2.2.5 Cálculo de um determinante de qualquer ordem
Dada uma matriz quadrada , de ordem , para calcular o determinante
podemos usar o processo de triangulação.
No processo de triangulação, obtemos o determinante de uma matriz quadrada de
ordem transformando essa matriz numa matriz triangular superior (ou inferior),
respeitando as propriedades dos determinantes, são efetuados operações com o para
os necessários ressarcimentos objetivando que seu valor não seja alterado. Nesse processo
operações são realizadas com a finalidade de transformar todos os elementos da diagonal
principal, exceto o último, em , e todos os elementos abaixo (para matriz triangular superior)
e acima (para matriz triangular inferior) da diagonal principal igual a zero.
Para cada um dos elementos da diagonal principal três casos podem acontecer. Caso
um elemento é igual a zero, então troca-se de linhas e multiplicar o determinante por
para manter o valor do determinante e compensar a operação efetuada. No segundo caso
em que o elemento for igual a , para transforma-lo em deve-se multiplicar a linha inteira
por ⁄ , e multiplicar o da matriz por para compensar. E no ultimo caso, quanto o
elemento já for igual a situação a qual nada se faz.
2.2.6 Matriz Inversa e Matrizes Semelhantes
Seja uma matriz quadrada de ordem , denominamos de inversa de uma matriz
tal que , onde é uma matriz identidade de ordem . Representamos para
a inversa de . Uma matriz quadrada em que seu determinante é igual a zero,
denominamos essa matriz de singular e chamamos de matriz não-singular uma matriz cujo
determinante é diferente de zero.
Duas matrizes quadradas e são ditas semelhantes se existir uma matriz invertível
tal que .

24
2.3 EQUAÇÕES POLINOMIAIS E DETERMINAÇÃO DAS RAÍZES REAIS
Nessa seção iremos definir, representar, classificar e introduzir propriedades e
operações sobre equações polinomiais e o polinômio característico. Todas as definições foram
embasadas de acordo com Arenales (2010), Campos Filho (2010) e Franco (2006):
2.3.1 Equações Polinomiais
Considere um conjunto de números reais ou complexos, e um número inteiro não
negativo. A equação polinomial pertencente a , é escrito da seguinte forma:
onde são reais ou complexos.
Desejamos determinar tal que . As raízes de podem ser números
reais ou complexos. Apresentaremos a seguir algumas definições e resultados sobre
polinômios e equações polinomiais, sobre a localização de raízes polinomiais reais ou
complexas de acordo com Arenales (2010):
I. Um polinômio com coeficientes reais ou complexos é escrito na forma
, onde é o grau desse polinômio, com .
II. Dois polinômios e são iguais se seus graus e coeficientes são iguais.
Sejam:
III. Seja um polinômio de grau . Dizemos que é uma raiz de
multiplicidade “m” se:
25
onde é a m-ésima derivada de , no ponto .
IV. A equação polinomial , com coeficientes reais ou complexos, possui pelo
menos uma raiz, ou seja, existe pelo menos uma raiz real ou complexa tal que
(Teorema Fundamental da Álgebra).
V. Seja um polinômio de grau . A equação possui
exatamente n raízes (reais + complexas + multiplicidade).
VI. Seja um polinômio de grau , então para qualquer existe um
único polinômio de grau tal que
onde é o resto da divisão de por (Teorema do Resto).
Para maiores detalhes sobre os resultados anteriores, consulte Demidovich (1976).
Para limites das raízes reais, temos que dada uma equação algébrica da forma
utilizando o teorema de Lagrange, uma equação algébrica pode ter suas raízes delimitadas.
Uma importante análise pertinente às equações polinomiais pode ser fundamentada no
teorema seguinte, definido em Campos Filho (2010).
Teorema 2.3.1 – Teorema de Lagrange: Seja
uma equação, se e , dentre os coeficientes
negativos, tiver o maior índice de coeficiente adotado, logo o limite superior das raízes
positivas de pode ser encontrado por
√
onde é o valor absoluto, em módulo, do maior coeficiente negativo.
A prova pode ser encontrada em Demidovich (1976).

26
2.3.2 Determinação das raízes reais
Um dos problemas mais identificados nos trabalhos acadêmicos é o calculo das raízes
de equações. Para se determinar as raízes dessas equações, o Método de Newton é uma das
ferramentas mais utilizadas. A partir do método de iteração linear, vamos deduzir o método de
Newton, vale lembrar que existem inúmeras maneiras de sua dedução. Assim, para descrever
tal método e com a intenção de introduzir o método da iteração linear para o calculo de uma
raiz da equação:
onde é uma função continua no intervalo em que contenha a raiz. Expressamos
também é da forma:
de maneira que qualquer solução de seja também solução de . Então, dado uma
função , qualquer solução de é denominada de ponto fixo de . Desta forma, o
problema de determinar um zero de foi transformado no problema de determinar o ponto
fixo de , e essa transformação não deve modificar a localização da raiz procurada.
De modo geral, existe inúmeras maneiras de expressar na forma . Basta
considerarmos:
com , onde a função deve ser escolhida de tal forma que .
De acordo com Franco (2006), pelo teorema seguinte, temos:
Teorema 2.3.2 - Seja uma função contínua, com derivadas de primeira e segunda
contínuas num intervalo fechado , da forma , cujo centro é solução de
. Seja e um limitante da forma, | | em . Então:

27
I. A iteração , pode ser executada indefinidamente, pois
para todo .
II. | | .
III. Seja ou e e se | | for suficientemente pequeno
então a sequencia será monotônico ou oscilante.
A prova pode ser encontrada em Franco (2006).
Pelo Teorema 2.3.2 temos a garantia de convergência se | | para
, com consideravelmente pequeno. Para isso, basta adotarmos tal que
.
Derivando em relação à , teremos:
e para , tem-se:
pois e colocando: teremos:
para
Tomando então:
, obtemos
e o processo iterativo
então definido por:
é chamado método de Newton, que converge sempre que | | for suficientemente
pequeno.

28
2.4 SISTEMAS DE EQUAÇÕES LINEARES
Dados os números reais tal que , denominamos de equação
linear a equação da seguinte forma:
onde, são denominados de coeficientes, representa o termo independente e
são as variáveis.
Quando analisamos um conjunto de m equações lineares e n incógnitas, definimos
como um sistema de equações linear a expressão da seguinte forma:
{
onde , ; são números reais denominados de coeficientes do
sistema, são as incógnitas do sistema, são os termos independentes.
Um sistema linear pode ser representado por matrizes, na forma , em que é a
matriz dos coeficientes, é a matriz das incógnitas e a matriz dos termos independentes. Se
tivermos um sistema linear com duas equações e duas incógnitas da forma:
{
podemos escrever :
[
] [
] [
]
2.5 VETORES
Segundo Boldrini (1986), certas grandezas físicas como, por exemplo, a força ou o
deslocamento de um corpo, soluções de sistemas lineares ou de equações diferenciais podem

29
ser representadas por vetores. Quando representamos esses vetores em um sistema de
coordenadas ortogonais simplificamos a resolução de problemas. Um vetor no plano (no
espaço ) em que seu ponto inicial está na origem de um sistema de coordenadas, as
coordenadas do ponto final de são ditas componentes de , obtendo:
Podemos representar na forma matricial, sendo este vetor representado como uma
matriz-coluna da seguinte forma:
[
]
De forma análoga no plano, no espaço representamos vetores por números reais
por meio de um sistema de coordenadas dado por três retas orientadas, perpendiculares duas a
duas. Os vetores no espaço são dados por segmentos de retas em que o ponto inicial esta
na origem, e as coordenadas no seu ponto final, estes são denominados de
componentes de , sendo escrito da seguinte forma:
2.6 ESPAÇOS VETORIAIS
Apresentaremos nesta seção alguns conceitos relacionados a espaços vetoriais. Todas
as definições foram embasadas de acordo com Steinbruch (2010) e Boldrini (1986).
2.6.1 Definição
Dado um conjunto , não vazio, na qual estão caracterizados operações de adição e
multiplicação por escalar, ou seja, para todo vetor pertencente a , a soma pertence
a e para todo o conjunto dos reais qualquer vetor pertencente a , tem-se que um
escalar multiplicado por pertence a .
É denominado de espaço vetorial real o conjunto com essas duas operações e
assinalado os seguintes axiomas:
A) Em relação à adição:

30
A1)
A2)
A3)
A4)
M) Em relação à multiplicação por escalar:
M1)
M2)
M3)
M4)
para todo
Assim todo conjunto que obedeça aos oito axiomas acima especificados será um
espaço vetorial. Um exemplo de espaço vetorial é o conjunto com as operações usuais.
2.6.2 Subespaços Vetoriais
Dado um espaço vetorial sobre . É denominado de subespaço vetorial de um
subconjunto , não vazio, , tal que:
a) ;
b) ; e
c) .
Algumas observações podem ser feitas:
Pelas circunstâncias de definição acima garantem quando efetuamos operações em
(soma e produto por escalar), não adquirimos um vetor fora de W. Assim, podemos afirmar
que também é um subespaço vetorial, pois as operações ficam bem definidas, não
necessitando verificar propriedades de espaço vetorial, pois . Qualquer espaço
vetorial admite pelo menos dois subespaços vetoriais (denominados subespaços triviais), o
conjunto composto pelo próprio espaço vetorial e o pelo vetor nulo (BOLDRINI, 1986,
p.106).

31
2.6.3 Combinação Linear e Subespaços Gerados
Dado um espaço vetorial (real ou complexo), e os escalares
números reais (ou complexos). Logo, o vetor:
é chamado de combinação linear de e é um elemento de .
Segundo Boldrini (1986), uma vez definidos os vetores em , o conjunto
de todos os vetores de que são combinação linear destes, é um subespaço vetorial. é
denominado subespaço gerado por e usamos a representação:
De modo formal, escreve-se:
{ }
Segundo Boldrini (1986, p. 112)
Uma outra caracterização de subespaço gerado é a seguinte:
é o menor subespaço de que contem o conjunto de vetores { }, no
sentido de que qualquer outro subespaço de que contenha { }
satisfará .
Seja um subconjunto formado por , onde e é um espaço
vetorial. O conjunto de todos os vetores de é um subespaço vetorial de .
De fato, se:
e
Vetores quaisquer em , logo:
32
Como e que , por serem combinações lineares de ,
logo é um subespaço vetorial de .
Segue algumas observações relacionadas a subespaços gerados de acordo com
Steinbruch (2010):
I. O subespaço diz-se gerado pelos vetores , ou gerado pelo conjunto ,
e representa-se por:
II. Para o caso particular de , define-se: { }.
III. , ou seja, { }
IV. Todo conjunto gera um subespaço vetorial de , podendo ocorre .
Nesse caso, é um conjunto gerador de .
Um espaço vetorial é finitamente gerado se existe um conjunto finito , tal
que
2.6.4 Dependência e Independência Linear
Seja um espaço vetorial. O conjunto dos vetores são linearmente
independentes ou LI, se existem escalares todos nulos, tais que:
então .
Se observarmos que essa relação não é sempre válida e que os escalares
nem todos são iguais à zero, ou seja, para , dizemos que os vetores são
linearmente dependentes ou LD.
2.6.5 Base e Dimensão
Um conjunto de vetores { } é chamado de base do espaço vetorial
se:

33
a) O conjunto for linearmente independente.
b) O conjunto for gerador do espaço vetorial .
De acordo com Steinbruch (2010), se { } for uma base de um espaço
vetorial , então todo conjunto com mais de vetores será linearmente dependente.
Um espaço vetorial tem dimensão se:
a) Existem vetores linearmente independentes.
b) vetores são sempre linearmente dependentes.
Qualquer conjunto de vetores linearmente independentes é chamado base de um
espaço vetorial de dimensão e anota-se por . E qualquer base de um espaço
vetorial tem sempre o mesmo número de elementos. Este número é chamado de dimensão de
.
Assim, qualquer vetor do espaço pode ser representado como combinação linear dos
vetores da base.
2.6.6 Transformações Lineares
Sejam e dois espaços vetoriais. É denominado transformação linear de em
uma aplicação do tipo , que satisfaça as seguintes condições:
I.
II.
para todo pertencente a e para todo pertencente aos reais.
Um operador linear de é uma transformação linear , isto é, tal que .
Das propriedades de transformação linear: se for uma transformação linear,
então
para todo pertencentes a e para todo pertencentes aos reais.
De forma análoga, tem-se:

34
para todo pertencente a e para todo pertencente aos reais, , ou seja, a
imagem de uma combinação linear de vetores é igual a combinação linear das imagens desses
vetores, com os mesmos coeficientes (STEINBRUCH, 2010, p. 161).
Suponhamos agora que { } seja uma base do domínio V e que se saiba
quais são as imagens dos vetores desta base:
Sempre é possível obter a imagem de qualquer , pois sendo uma
combinação linear dos vetores da base, ou seja:
e, pela relação acima, vem:
Assim, uma transformação linear fica completamente definida quando se
conhecem as imagens dos vetores de uma base de V.
Sejam e dois espaços vetoriais com bases e e uma matriz , podemos obter
uma transformação linear. Toda transformação linear de um espaço vetorial de dimensão
em um espaço vetorial de dimensão pode ser representada por uma matriz .
Representamos simplesmente por à matriz de uma transformação linear em
relação às bases canônicas.
Dada uma transformação linear , o conjunto de todos os vetores que
são transformados em denominamos como núcleo. Representamos esse conjunto
vetores por ou .
Dada uma transformação linear , o conjunto dos vetores que são
imagens de pelo menos um vetor , denominamos de imagem. Representamos esse
conjunto de vetores por ou .
2.7 POLINÔMIO CARACTERÍSTICO
Segundo CALLIOLI (1990), seja uma matriz de ordem (complexa ou
real), denomina-se polinômio característico de um polinômio de grau da forma:

35
(
)
Proposição – 1
Matrizes semelhantes têm o mesmo polinômio característico.
Demonstração
Seja e matrizes semelhantes, há uma matriz inversível tal que .
Tem-se:
Da demonstração anterior, tornamos válida a seguinte definição:
Dado um espaço vetorial de dimensão e um operador linear.
Denominamos de polinômio característico de o polinômio característico da matriz
em relação a qualquer base de .
Essa definição é válida, pois matrizes do mesmo operador são necessariamente
matrizes semelhantes. Seja um espaço vetorial de dimensão e um operador
linear. Então as raízes de são os autovalores de (CALLIOLI, 1990, p.249).
2.8 AUTOVALORES E AUTOVETORES
Nessa seção apresentaremos conceitos relacionados a autovalores e autovetores. Todas
as definições foram embasadas de acordo com Leon (2008) e Boldrini (1986).

36
Segundo Boldrini (1986) as noções de autovalor e autovetor de uma transformação
linear (ou matriz) são fundamentais, por exemplo, em física atômica porque os níveis de
energia dos átomos e moléculas são dados por autovalores de determinadas matrizes. Também
o estudo dos fenômenos de vibração, analise de estabilidade de um avião e muitos outros
problemas de física levam à procura de autovalores e autovetores de matrizes.
Os autovalores e autovetores estão inseridos em muitas das aplicações de álgebra
linear, representados pela equação do tipo . Se na equação existir uma solução não-
trivial, logo dizemos que é um autovalor de e que é um autovetor associado a .
Segundo Leon (2008, pag. 212)
Se é uma matriz , então representa uma transformação linear
do em si mesmo. Autovalores e autovetores nos proporcionam
uma chave para entender como o operador funciona. Por exemplo, se
, o efeito do operador em qualquer autovetor associado a é
simplesmente o de esticar ou encolher por um fator constante. De fato,
o efeito do operador é determinado facilmente em qualquer
combinação linear de autovetores.
Dada uma matriz de ordem . Um autovalor ou valor próprio de é o escalar se
existir um vetor não-nulo tal que . Esse vetor é um autovetor ou vetor próprio de
associado a (LEON, 2008, p. 213).
A equação pode ser reescrita da seguinte forma:
O escalar é um autovalor de se assumir uma solução não-trivial . O conjunto
de soluções é , que é um subespaço de . Portanto, se um escalar é um
autovalor de , então { } e qualquer vetor não-nulo em é um vetor
associado a . O subespaço é chamado de auto-espaço associado a .
Se for uma matriz singular, então existira uma solução não-trivial da equação
, equivalentemente,

37
Obteremos um polinômio de grau na variável λ quando fizermos a expansão do
determinante na equação anterior,
De acordo com Leon (2008), esse polinômio é denominado de polinômio
característico, e portanto é a equação característica para a matriz . Os autovalores da
matriz são raízes do polinômio característico. Enumerando as raízes segundo sua
multiplicidade, o polinômio característico tem exatamente raízes. Então, tem
autovalores, alguns dos quais podem estar repetidos e alguns podem ser números complexos.
Exemplo 2.8
Dada à transformação , definida por .
Determine o polinômio característico e seus os autovalores.
Solução: Da transformação , geramos uma matriz :
[
]
Para determinar o polinômio característico, temos:
|
|
Ou seja:
As raízes dessa equação são:
e
Logo, esses valores são os autovalores da matriz . Para calcular os autovetores
associados aos autovalores e , basta resolver a expressão .
38
3 Métodos Numéricos para a Determinação do Polinômio Característico e seus
Autovalores.
Apresentaremos nesta seção dois métodos numéricos para a determinação do
polinômio característico e seus autovalores. Todas as definições foram embasadas de acordo
com Franco (2006).
3.1 Introdução
Os métodos numéricos de Leverrier e Leverrier-Faddeev são utilizados para
determinar o polinômio característico de uma matriz de ordem . Esses métodos são muito
uteis, pois determinam o polinômio característico de matrizes de ordem , independente se a
matriz tenha muitos elementos iguais à zero. A expansão direta do determinante para a
determinação do polinômio característico só é eficiente se a matriz seja de ordem baixa ou
que tenha muitos elementos iguais à zero. Portanto, os métodos numéricos que estudaremos
são obtidos sem calcular seu determinante (Franco, 2006 p. 203).
Nesse capítulo apresentaremos métodos numéricos para a determinação do polinômio
característico de uma matriz de ordem . Com a determinação do polinômio de uma matriz
, para calcular os seus autovalores utilizaremos métodos numéricos para a determinação de
zeros do polinômio. Entretanto, necessitamos antes do seguinte resultado.
De acordo com Franco (2006), temos:
Teorema 3.1 - Teorema de Newton: Seja o polinômio:
onde são suas raízes. Tem-se ainda que:
∑
onde é o somatório das potencias das raízes (ou autovalores) do polinômio. Então,
∑
A prova deste teorema pode ser encontrada em Jennings (1969).

39
Logo, por esse teorema observamos a existência de uma relação entre as somas das
potências das raízes (ou autovalores) do polinômio e os seus coeficientes. Desse modo,
conhecidas as somas das potências das raízes do polinômio podemos determinar os seus
coeficientes (Franco, 2006 p. 204).
Considere o seguinte exemplo: dado as somas das potencias das raízes
de um polinômio . Determine .
Solução: Sabendo que:
e, de acordo com Teorema 3.1, tem-se que:
Igualando a o coeficiente do termo de maior grau do polinômio , temos, por
substituição nas equações acima, que:
Logo, o polinômio é:
Observe que as raízes deste polinômio obtidos por métodos numéricos são:
.
Assim, sabendo as somas das potencias das raízes proporciona a
determinação dos para .
Para os métodos numéricos descritos a seguir, usaremos a seguinte notação para o
polinômio característico de uma matriz , de ordem :

40
3.2 Método de Leverrier
Dada uma matriz de ordem , podemos determinar o polinômio característico de
através do método de Leverrier.
Seja os autovalores de uma matriz quadrada de ordem , ou seja, se
são os zeros do polinômio característico, então:
∑
portanto, pelo teorema , obtemos:
onde são os coeficientes de .
Logo, se conhecermos as somas das potências das raízes , , obteremos os
coeficientes de .
Para determinar as somas parciais , efetuamos a expansão direta do determinante de
, o coeficiente de em é Como, o
coeficiente em é . Logo, teremos:
É denominado traço de representado por a soma dos elementos da diagonal
principal de uma matriz . Além disso, de , , e assim:
ou seja, a soma dos autovalores da matriz é igual ao traço de .
Assim, desde que os autovalores de são a potência dos autovalores de A, temos:
Algumas observações de acordo com Lacerda (2007):
I. As raízes do polinômio característico são os autovalores da matriz
II. Se é autovalor de , então é autovalor de .

41
III. A soma dos autovalores de uma matriz é igual ao seu traço.
De (II) temos:
Portanto, a partir de podemos determinar os coeficientes do polinômio
característico quando obtivermos os números através do cálculo das potências de
. Depois disso, podemos determinar as raízes desse polinômio por qualquer dos métodos
numéricos, obtendo os autovalores de (FRANCO, 2006).
3.3 Método de Leverrier-Faddeev
Segundo Franco (2006), uma alteração do método de Leverrier, realizada por Faddeev,
simplifica os cálculos dos coeficientes do polinômio característico e obtém, em alguns casos,
os autovetores de . Este método é chamado de Método de Leverrier-Faddeev.
Primeiramente, antes de descrever o método, precisamos definir uma sequência de
matrizes: da seguinte forma:
Apresentaremos, a seguir, propriedades da sequencia de matrizes: de
acordo com Franco (2006):

42
I. Os termos obtidos na sequência são os coeficientes do polinômio
característico , ou seja:
Prova: A prova de que será efetuada por indução.
Assumindo que , temos que , e assumindo
também que Provemos que: = .
Portanto, pela definição de sequência de matrizes , temos:
Desde que, pela hipótese de indução, obtemos:
Aplicando traço em ambos os membros da igualdade anterior, logo:
Agora, desde que e, pela definição de uma sequência de
matrizes,
, obtemos:
Analisando a expressão anterior com:
já vista anteriormente, obtemos: , o que completa a prova.
II. Dada uma matriz de ordem , então:

43
De acordo com FRANCO (2006):
Teorema 3.2 - Teorema de Cayley-Hamilton: Toda matriz é um zero do seu polinômio
característico, isto é, dada uma matriz , temos que:
é o polinômio característico de , então .
A prova deste teorema pode ser encontrada em Barnett (1990).
Então pelo teorema , temos:
Porém, pela definição de uma sequência de matrizes , e utilizando a primeira
propriedade, tem-se que: Considerando em e substituindo o
valor de em , temos:
III. Dada uma matriz não singular de ordem , e considerando da segunda propriedade
que obtemos:
Levando ainda em consideração a definição de uma sequência de matrizes ,
Logo:
Seja uma matriz não singular, então existe Dessa forma, multiplicando ambos
os membros da igualdade anterior por , obtemos:
Apresentamos a seguir algumas observações de acordo com Franco (2006):
a) Com o método de Leverrier-Faddeev, obtemos o polinômio característico de . Para
determinar seus autovalores basta determinar os zeros de .
44
b) Se ao fazer os cálculos resultar numa matriz diferente da matriz nula, você terá
cometido erros de cálculo.
c) Como e como então é uma matriz diagonal com todos os
elementos não nulos iguais a .
d) Se é singular então . Nesse caso, é um autovalor de .

45
4 RESULTADOS E DISCUSSÕES
Neste capítulo, é elaborado um estudo a respeito da aplicabilidade e operabilidade dos
métodos descritos anteriormente, mediante análises de exemplos de matrizes. Utilizaremos os
métodos de Leverrier e Leverrier-Faddeev para determinar o polinômio característico e ao
final, obteremos os autovalores do polinômio característico através do software SCILAB
5.4.1. O computador utilizado nos testes possui as seguintes configurações: Sistema
operacional Windowns Home Premium, tipo de sistema de 64 bits, processador inter®
core™ i3-2310M CPU @ 2.10 GHz, memória instalada (RAM) de 4G, HD de 500G, e cujo
fabricante do computador é CCE info.
Depois de encontrado o polinômio característico de uma matriz qualquer, para
determinar seus autovalores é necessário apenas utilizar algum dos vários métodos numéricos
de determinação de zeros polinomiais. Um dos métodos utilizados para determinar os zeros de
é o método de Newton visto anteriormente no capitulo , porém neste trabalho
utilizaremos uma das inúmeras funções disponíveis para cálculo de raízes polinomiais do
software SCILAB 5.4.1.
4.1 EXEMPLOS
4.1.1 MÉTODO DE LEVERRIER
Exemplo 4.1
Considere uma matriz :
[
]
Utilizando o método de Leverrier determinaremos o polinômio característico de .
Solução: A partir da matriz dada, temos que:
[
]

46
[
]
[
]
[
]
Utilizando para obter os coeficientes de polinômio, temos:
A partir de teremos a expressão final do polinômio caraterístico de , logo:
{ }
Agora, considerando , e com o recurso disponível pelo SCILAB 5.4.1, para
determinar os autovalores, segue-se:
47
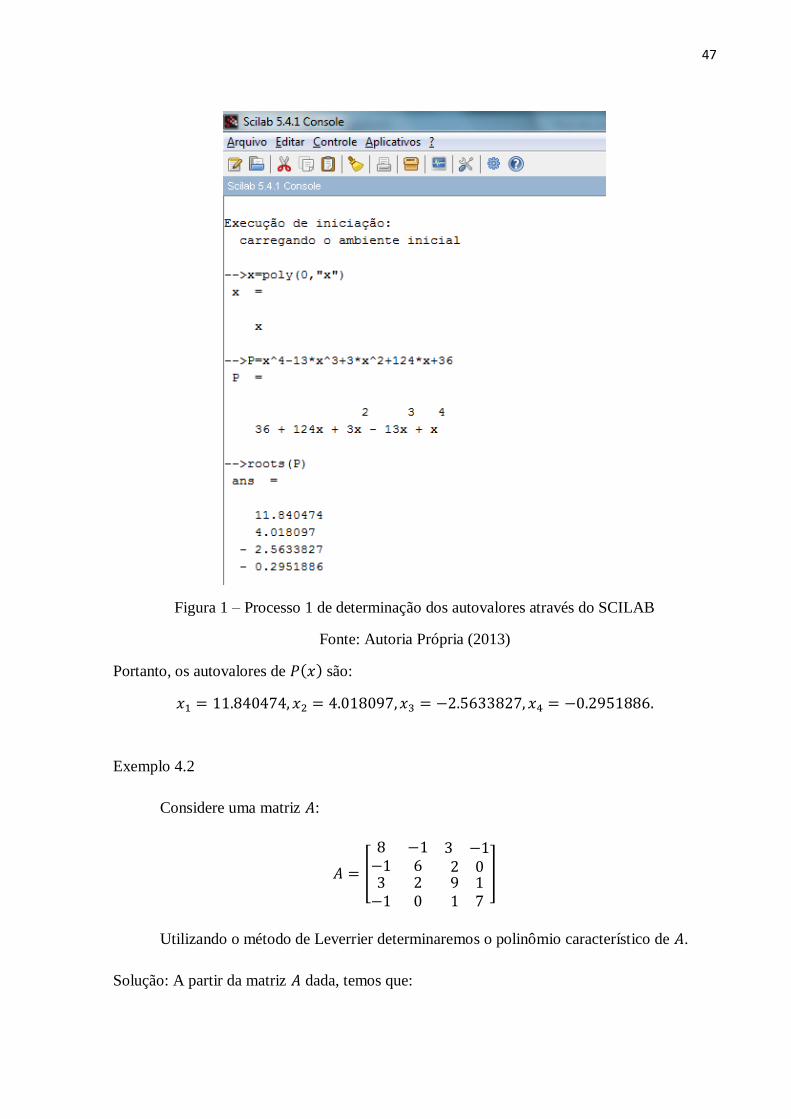
Figura 1 – Processo 1 de determinação dos autovalores através do SCILAB
Fonte: Autoria Própria (2013)
Portanto, os autovalores de são:
Exemplo 4.2
Considere uma matriz :
[
]
Utilizando o método de Leverrier determinaremos o polinômio característico de .
Solução: A partir da matriz dada, temos que:

48
[
]
[
]
[
]
[
]
Utilizando para obter os coeficientes de polinômio, temos:
A partir de teremos a expressão final do polinômio caraterístico de , logo:
{ }
Agora, considerando , com o recurso disponível pelo SCILAB 5.4.1, para
determinar os autovalores, segue-se:

49
Figura 2 – Processo 2 de determinação dos autovalores através do SCILAB
Fonte: Autoria Própria (2013)
Portanto, os autovalores de são:
4.1.2 MÉTODO DE LEVERRIER-FADDEEV
Considere a matriz dada no exemplo 4.1, temos:
[
]
Utilizando o método de Leverrier-Faddeev determinaremos o polinômio característico
de . Precisaremos construir a sequência para determinar o polinômio
característico . Deste modo, dispondo de (3.3), temos:
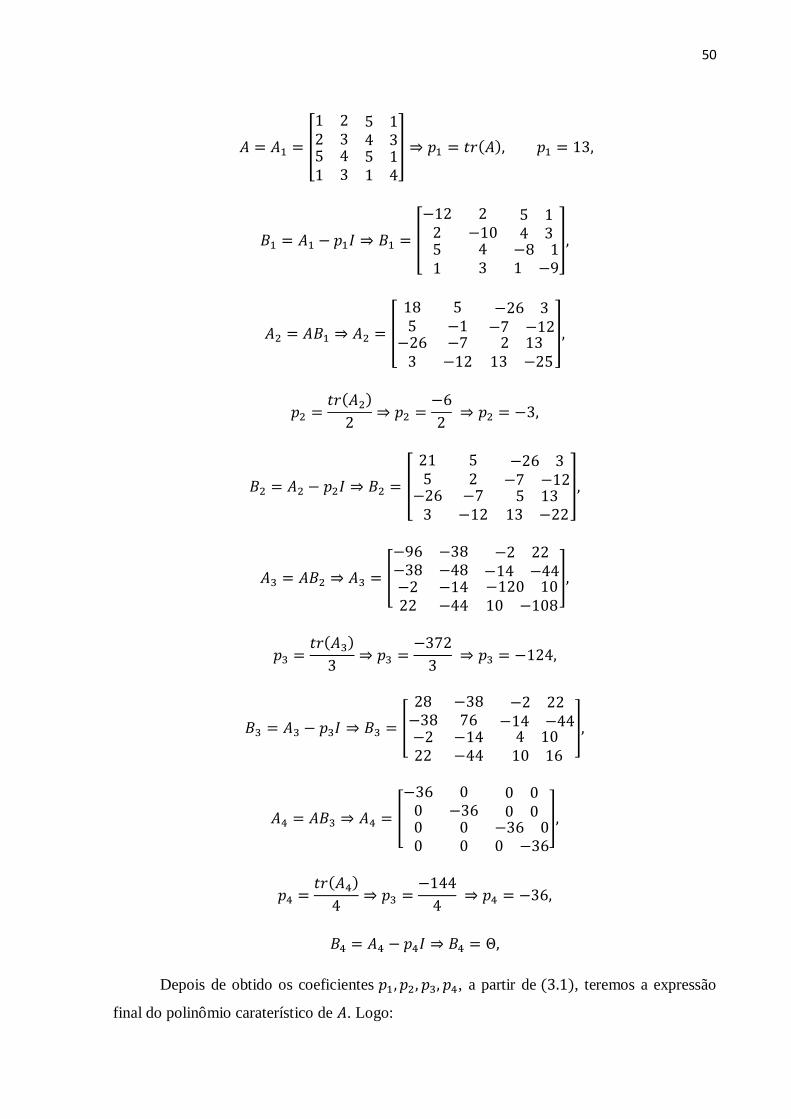
50
[
]
[
]
[
]
[
]
[
]
[
]
[
]
Depois de obtido os coeficientes , a partir de , teremos a expressão
final do polinômio caraterístico de . Logo:

51
{ }
Efetuando o mesmo procedimento do exemplo 4.1 e considerando , com o
recurso disponível pelo SCILAB 5.4.1, determinaremos os autovalores de . Como é
idêntico ao apresentado no exemplo 4.1, suas raízes também foram às mesmas, portanto as
raízes de são:
Agora, considere a matriz dada no exemplo 4.2, temos:
[
]
Utilizando o método de Leverrier-Faddeev determinaremos o polinômio característico
de . Precisaremos construir a sequência para determinar o polinômio
característico . Deste modo, dispondo de (3.3), temos:
[
]
[
]
[
]

52
[
]
[
]
[
]
[
]
Depois de obtido os coeficientes , a partir de , teremos a expressão
final do polinômio caraterístico de . Logo:
{ }
Efetuando o mesmo procedimento do exemplo 4.2 e considerando , com o
recurso disponível pelo SCILAB 5.4.1, determinaremos os autovalores de . Como é
idêntico ao apresentado no exemplo 4.1, suas raízes também foram às mesmas, portanto as
raízes de são:

53
Dos métodos apresentados nesse trabalho, uma das vantagens do método de Leverrier,
por exemplo, é que o modo de calcular é bastante simples e não existem casos inusitados.
Porém, o método é muito cansativo, pois é preciso calcular elevadas potências da matriz.
Entretanto uma das vantagens do método de Leverrier-Faddeev, é que as operações são muito
simples, visto que é necessário o cálculo do traço e divisão por um inteiro
, depois
calcular uma matriz , e então multiplica-la por uma matriz fixa para
determinar , repetindo o processo.
O cálculo de uma matriz num passo depende apenas do cálculo da matriz no passo
anterior. Logo, é necessário armazenar para o passo seguinte apenas os coeficientes e a última
matriz calculada. Uma matriz que tenha elementos inteiros, os coeficientes devem ser
inteiros.
O conhecimento de métodos numéricos para determinação do polinômio característico
e consequentemente, seus autovalores é de fundamental importância para a análise de
sensibilidade e comportamento de sistemas. As causas de sensibilidade da matriz Jacobiana de
fluxo de potência, adicionados das equações linearizadas que constituem controles e limites,
podem ser utilizados também para a avaliação do efeito das ações de controle de tensão.
Dessa forma é criada uma matriz sensibilidade de controle de tensão pela qual se consegue
estabelecer a relação existente entre tensões controladas e as grandezas controladas. A análise
possibilita avaliar se uma ação de controle é correta ou não e calcular ações de controle de
tensão com a finalidade de deslocar um ponto de operação improprio para um ponto de
operação seguro (HENRIQUES, 2009).
54
5 EXPERIMENTO COMPUTACIONAL
Nesse capítulo ilustraremos alguns procedimentos no software SCILAB 5.4.1 para
determinação do polinômio característico e seus autovalores através dos métodos de Leverrier
e Leverrier-Faddeev. Nesses procedimentos, utilizaremos a matriz do exemplo 4.1 e
criaremos uma matriz quadrada de ordem 13, no qual seus elementos são números inteiros de
a situados de forma aleatória. Em seguida, é calculado o polinômio característico
dessas matrizes utilizando os dois métodos. Esses procedimentos têm aplicação apenas
didática.
O método de Leverrier nesse trabalho esta inserido como uma função no
software SCILAB 5.4.1. Enquanto o algoritmo de Leverrier-Faddeev é uma adaptação do
método para o SCILAB 5.4.1. É de suma importância o conhecimento de um algoritmo para
determinação do polinômio característico e autovalores de matriz qualquer ordem, pois
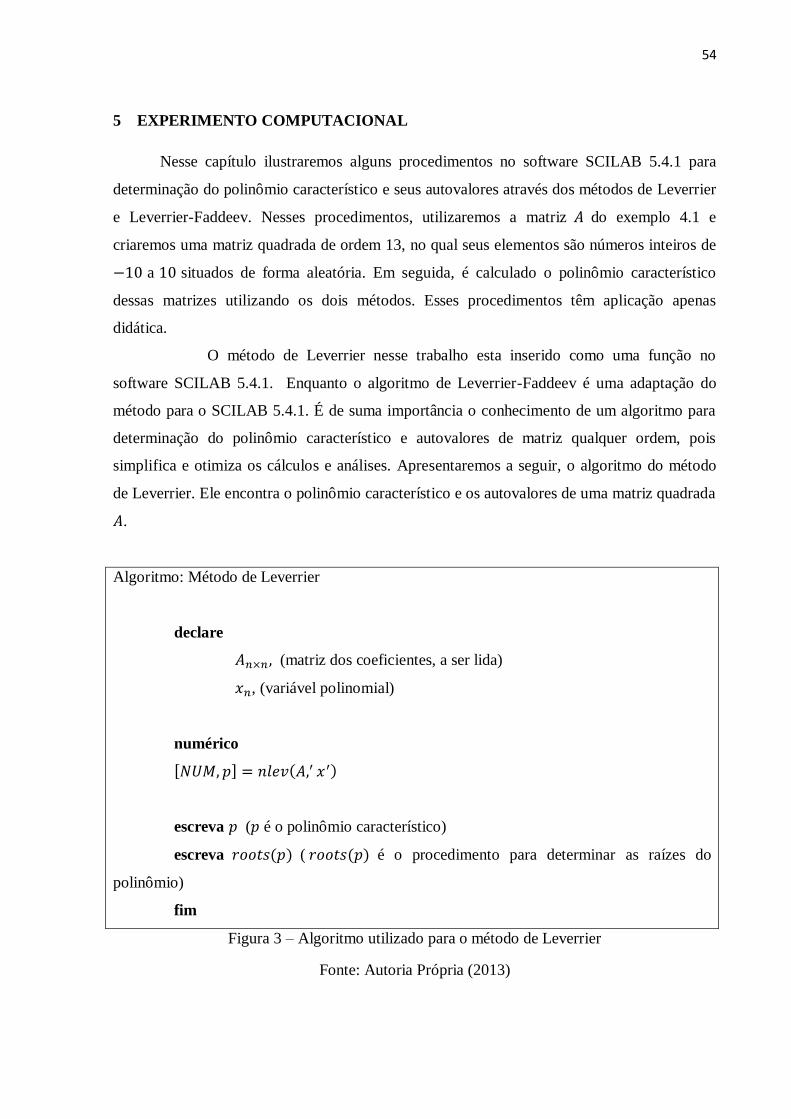
simplifica e otimiza os cálculos e análises. Apresentaremos a seguir, o algoritmo do método
de Leverrier. Ele encontra o polinômio característico e os autovalores de uma matriz quadrada
.
Algoritmo: Método de Leverrier
declare
(matriz dos coeficientes, a ser lida)
, (variável polinomial)
numérico
escreva ( é o polinômio característico)
escreva ( é o procedimento para determinar as raízes do
polinômio)
fim
Figura 3 – Algoritmo utilizado para o método de Leverrier
Fonte: Autoria Própria (2013)

55
A função é nativa do SCILAB e possui como parâmetros de
entrada a matriz e a variável polinomial, em branco. A execução desta função aplicada ao
método de Leverrier retorna as variáveis e ; esta ultima variável contém o polinômio
característico.
A função retorna um vetor com as raízes do polinômio característico.
Vamos verificar agora, dois exemplos de utilização de rotina. Queremos encontrar o
polinômio característico e os autovalores da matriz do exemplo 4.1, temos:
[
]
Fazendo a matriz em código no SCILAB e o definindo no algoritmo do método de
Leverrier, teremos o seguinte resultado para o polinômio característico de :
e seus autovalores são:
A partir desse momento, determinaremos o polinômio característico e os autovalores
de uma matriz quadrada de ordem 13, no qual seus elementos são números inteiros de
a situados de forma aleatória, portanto temos:
[
]

56
Escrevendo a matriz em código no SCILAB e o definindo no algoritmo do método
de Leverrier, teremos os seguintes resultados para o polinômio característico de e seus
autovalores:
Figura 4 – Processo 3 de determinação dos autovalores através do SCILAB
Fonte: Autoria Própria (2013)

57
Agora, apresentaremos o algoritmo do método de Leverrier-Faddeev no formato para
o software SCILAB 5.4.1. Ele encontra o polinômio característico e os autovalores de uma
matriz quadrada .
Algoritmo: Método de Leverrier-Faddeev
declare
(matriz dos coeficientes, a ser lida)
numérico
Defina
, (representa o tamanho da matriz )
, (matriz identidade)
, (matriz identidade)
(vetor que armazena valores dos coeficientes p)
para
, ( traço da matriz )
,
fim para
(gera polinômio característico)
(gera os autovalores)
escreva
escreva
fim
Figura 5 – Algoritmo utilizado para o método de Leverrier-Faddeev
Fonte: Autoria Própria (2013)

58
As funções e são nativas do SCILAB e possui como
parâmetros de entrada a matriz e as variável (que representa no número de linhas) e (que
representa o número de colunas), onde representam o tamanho da matriz e
a matriz identidade. As funções e retorna o traço da matriz A e os coeficientes
da matriz polinomial, respectivamente. A execução desta função aplicada ao método de
Leverrier-Faddeev retorna a variável ; esta por sua vez contém o polinômio característico.
A função retorna um vetor com as raízes do polinômio
característico.
Vamos verificar dois exemplos de utilização de rotina para o algoritmo de Leverrier-
Faddeev. Queremos encontrar o polinômio característico e os autovalores da matriz do
exemplo 4.1, temos:
[
]
Fazendo a matriz em código no SCILAB e o definindo no algoritmo do método de
Leverrier-Faddeev, teremos o seguinte resultado para o polinômio característico de :
e seus autovalores são:
A partir desse momento, determinaremos o polinômio característico e os autovalores
de uma matriz quadrada de ordem 13 já utilizada no algoritmo de Leverrier, no qual seus
elementos são números inteiros de a situados de forma aleatória, portanto temos:
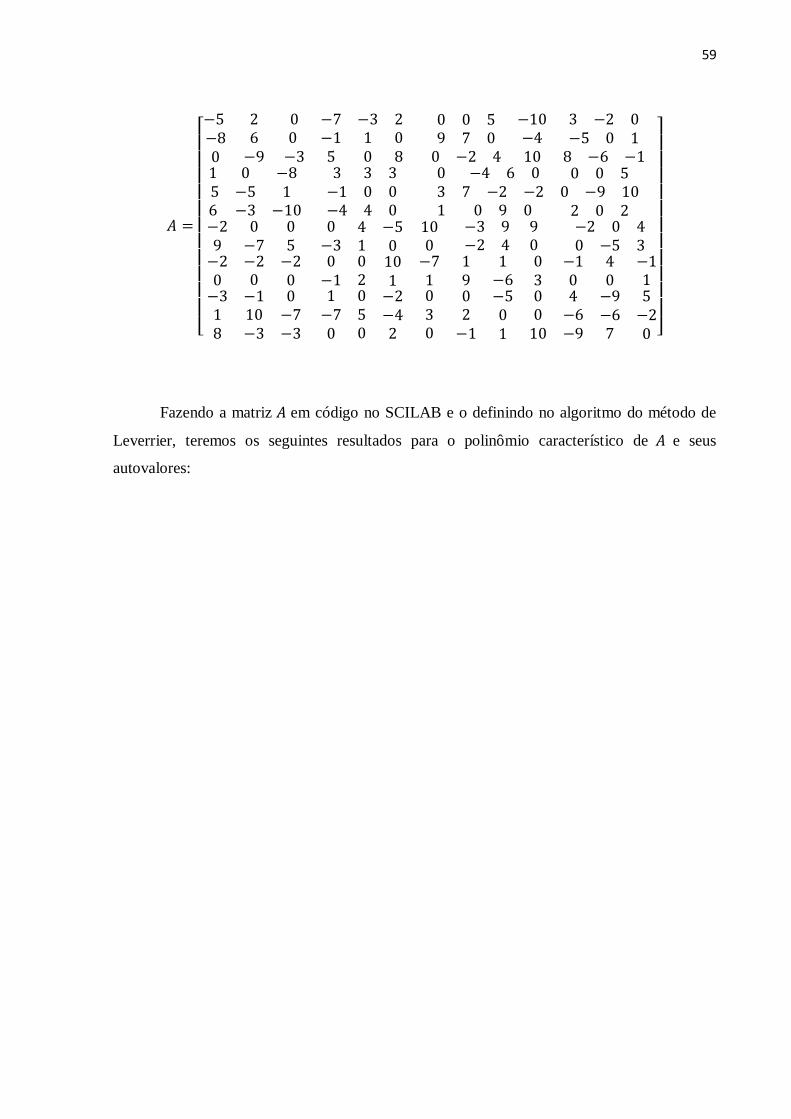
59
[
]
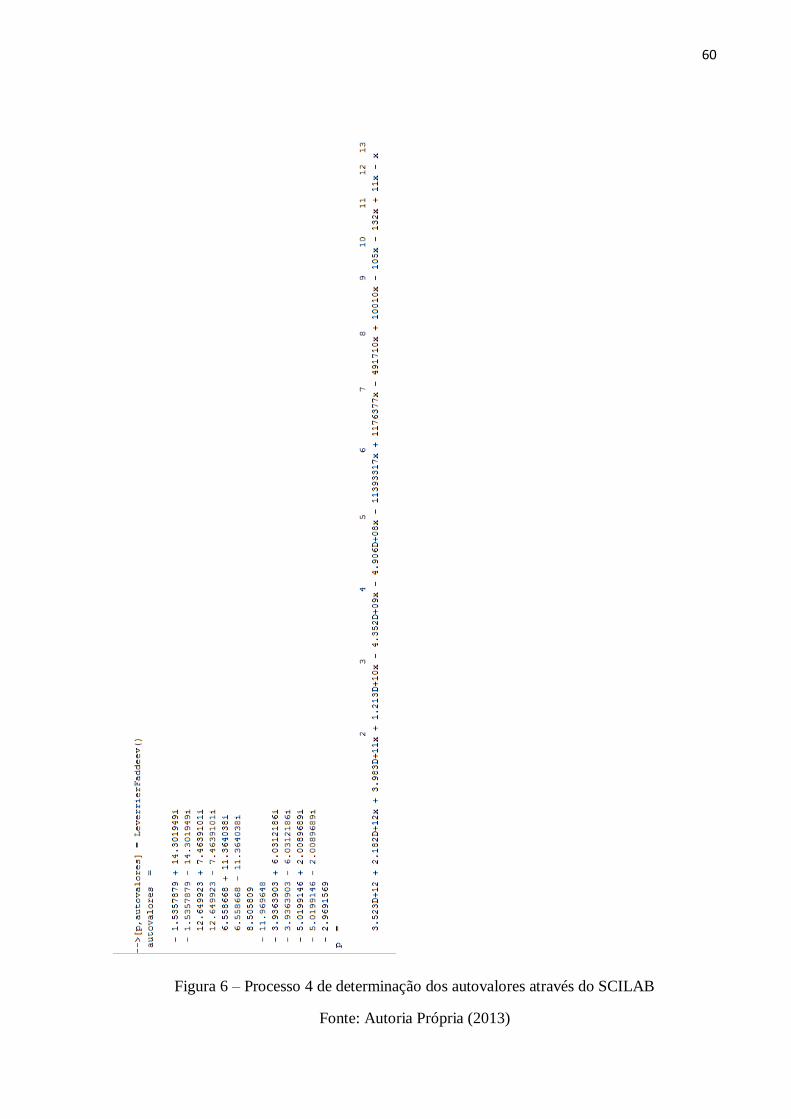
Fazendo a matriz em código no SCILAB e o definindo no algoritmo do método de
Leverrier, teremos os seguintes resultados para o polinômio característico de e seus
autovalores:
60
Figura 6 – Processo 4 de determinação dos autovalores através do SCILAB
Fonte: Autoria Própria (2013)
61
Vimos que, a partir de propriedades de equações polinomiais que dado um polinômio
de grau , a equação polinomial do tipo possui exatamente raízes (reais +
complexas + multiplicidade).
Algumas análises podem ser observadas dos resultados obtidos, tanto o algoritmo de
Leverrier quanto o algoritmo de Leverrier-Faddeev geraram o polinômio característico das
matrizes estudadas e encontrou suas raízes, as quais representam os autovalores (reais +
complexas + multiplicidade) do polinômio. Observamos também, que uma matriz de ordem
gera um polinômio característico de grau .

62
6 CONSIDERAÇÕES FINAIS
O presente trabalho objetivou o estudo do polinômio característico através de seus
conceitos inerentes, buscando abranger desde conhecimentos básicos de álgebra linear, como
matrizes, espaços vetoriais, autovalores e autovetores até métodos numéricos para sua
resolução e aplicação.
O estudo do polinômio característico através dos métodos de Leverrier e Leverrier-
Faddeev são de fundamental importância no conhecimento de diversos campos estudo, como
teoria de controle e análise estrutural. Inúmeros problemas detectados nas engenharias podem
ser identificados e resolvidos através da utilização de autovalores do polinômio característico
matricial. Por exemplo, no problema de fluxo de potência para a determinação de áreas de
controle de tensão.
Ainda neste trabalho, vimos que os métodos de Leverrier e Leverrier-Faddeev
apresentam vantagens relacionadas ao modo de calcular o polinômio característico de uma
matriz de qualquer ordem, onde seu cálculo é bastante simples e não existem casos
inusitados.
O estudo mostrou também, a eficiência tanto dos métodos de Leverrier e Leverrier-
Faddeev para determinação do polinômio característico e seus autovalores quanto os
algoritmos de Leverrier e Leverrier-Faddeev para determinação polinômio característico e
seus autovalores para de exemplos numéricos computacionais.
Nosso estudo se preocupou em primeiro lugar, em se dedicar ao estudo e
conhecimento de conceitos e características relacionadas às bases teóricas do assunto e aos
métodos numéricos de Leverrier e Leverrier-Faddev para determinação do polinômio
característico. Posteriormente, aplicamos os métodos Leverrier e Leverrier-Faddeev para
problemas convencionais e computacionais, as análises e características relacionadas ao
polinômio característico e seus autovalores dependerão do problema em estudo, como
economia, eletrônica, teoria da informação e outros. Definir um algoritmo para utilização em
um software, simplifica e otimiza todo o procedimento.
63
REFERÊNCIAS
ARENALES, S.; DAREZZSO, A. Cálculo Numérico. São Paulo, Thompson: 2008.
BARNETT, S. - Matrices-Methods and Applications. Clarendon Press. Oxford, 1990.
BOLDRINI, J. L.; COSTA, S. I.R.; FIGUEIREDO, V. L.; WETZLER, H. G. álgebra linear.
3 ed. São Paulo: Harbra, 1986.
CALLIOLI, C. A. et alii. Álgebra linear e aplicações. São Paulo: Atual, 1978.
CAMPOS, F.; FERREIRA, F. Algoritmos Numéricos. 2. ed. Rio de Janeiro: Ltc, 2010.
DEMIDOVICH, B. P.; MARON, I. A. Computational Mathematics. Moscou: Mir Publishers,
1976.
DOS SANTOS, T. J. P. álgebra linear, 1ª ed, Bahia, edição de Adriano P. Cattai e Paulo H.
R. do Nascimento
DURAND, E. Solutions Numériques Des Équations Algébriques – Vol. 1. Paris: Masson et
Cie Éditeurs, 1971.
FRANCO, N. B. Cálculo Numérico. São Paulo: Prentice Hall, 2006.
HENRIQUES, R. M. Utilização de Autovalores e Autovetores no problema de Fluxo de
Potência para Determinação de Areas de Controle de Tensão/ Ricardo Mota Henriques.
Rio de Janeiro, UFRJ/COPPE, 2009.
JENNINGS, W. First Course in Numerical Methods. Nova York: Macmillan, 1964.
LACERDA, J. F. de. O Algoritmo de Leverrier – Faddeev. 7 f. artigo - Departamento de
Matemática, Universidade Estadual de Maringá, 2007.
LEON, S. J. Álgebra Linear com Aplicações. 8. ed. Rio de Janeiro: LTC, 2011.
RUGGIERO, M. A. G.; LOPES, V. L. da R. Calculo Numérico: Aspectos teóricos e
computacionais. 2. ed. São Paulo: Makron Books, 1996
STEINBRUCH, A.; WINTERLE, P. Álgebra Linear. 2 ed. São Paulo: Pearson, 2010.