1-1 wireless sensor networks tutorial katia obraczka department of computer engineering university...
Post on 21-Dec-2015
215 views
TRANSCRIPT

1-1
Wireless Sensor NetworksTutorial
Katia ObraczkaDepartment of Computer
EngineeringUniversity of California, Santa
Cruz
May 2006

1-2
Introduction

1-3
Main Goals
Overview of wireless sensor networks. What are sensor networks? Unique characteristics/challenges, etc.
State-of-the-art in sensor networks research.

1-4
Topics
Introduction. Applications. E2E protocols. Routing and data
dissemination. Storage, querying,
and aggregation. Topology control.
Deployment issues. Localization. Time synchronization.
Medium access control.
Energy models.

1-5
Introduction
What are wireless sensor networks? Unique characteristics/challenges. Basic concepts and terminology.

1-6
What are wireless sensor networks (WSNs)?
Networks of typically small, battery-powered, wireless devices. On-board processing, Communication, and Sensing capabilities.
Sensors
Processor
Radio
Storage
POWER
WSN device schematics

1-7
WSN node components
Low-power processor. Limited processing.
Memory. Limited storage.
Radio. Low-power. Low data rate. Limited range.
Sensors. Scalar sensors:
temperature, light, etc. Cameras,
microphones. Power.
Sensors
Processor
Radio
Storage
POWER
WSN device schematics

1-8
Why Now?
Use of networked sensors dates back to the 1970s. Primarily wired and “Centralized”.
Today, enabling technological advances in VLSI, MEMS, and wireless communications. Ubiquitous computing and Ubiquitous communications.
1-9
Vision: Embed the World
•Network these devices so that they can execute more complex task.
•Embed numeroussensing nodes to monitor and interact with physical world
Images from UCLA CENS

1-10
Examples of WSN Platforms
PC-104+(off-the-shelf)
UCLA TAG(Girod)
UCB Mote (Pister/Culler)

1-11
Berkeley Mote
Commercially available. TinyOS: embedded OS running on
motes.
1-12
Design Challenges
Why are WSNs challenging/unique from a research point of view?
Typically, severely energy constrained. Limited energy sources (e.g., batteries). Trade-off between performance and
lifetime. Self-organizing and self-healing.
Remote deployments. Scalable.
Arbitrarily large number of nodes.

1-13
Design Challenges (Cont’d)
Heterogeneity. Devices with varied capabilities. Different sensor modalities. Hierarchical deployments.
Adaptability. Adjust to operating conditions and changes
in application requirements. Security and privacy.
Potentially sensitive information. Hostile environments.
1-14
WSN Applications
Monitoring. Scientific, ecological applications.
• Non-intrusiveness.• Real-time, high spatial-temporal resolution.• Remote, hard-to-access areas.
Surveillance and tracking. Reconnaissance. Perimeter control.
“Smart” Environments. Agriculture. Manufacturing/industrial processes.
1-15
WSN Applications (Cont’d)
UCLA Center for Embedded Networked Sensing (CENS) http://www.cens.ucla.edu/.
Berkeley Wireless Embedded Systems (WEBS).

1-16
WSN Applications at UCSC
SEA-LABS. CARNIVORE. Meerkats. Yellowstone.

1-17
Sensor Exploration Apparatus utilizing
Low–power Aquatic Broadcasting System

1-18
SEA-LABS
Joint work with: Don Potts (Professor, Biology) Matt Bromage (PhD student, CE)

1-19
Mission Statement
SEA-LABS strives to engineer a real-time, low-cost, low-power consumption environmental monitoring system for use in shallow-water reef habitats. Our goal is to measure several important physical and chemical variables for use in laboratory experiments studying the growth and calcification of corals and coralline algae.

1-20
Architecture

1-21
P. O. D. Board size: 3.0” x 1.5” One antenna for both transmit
and receive Transmit & receive data
packets from base station
B u o y
Implementation

1-22
Current Status

1-23
CARNIVORE

1-24
CARNIVORES
Joint work with: Terrie Williams (Professor, Biology) Dan Costa (Professor, Biology) Roberto Manduchi (Professor, CE) Vladi Petkov (PhD student, CE) Cyrus Bazeghi (PhD student, CE) Matt Ruttinshauser (MS student, CE and
Biology)
1-25
Motivation Need to investigate in more detail the
behavior of predators. Monitoring their location More importantly, monitoring their activity
patterns to draw up in depth energy budgets (activities such as walking, trotting, galloping and eating will be identified)
Several questions can be answered Can coyotes assimilate food and run
simultaneously Do coyotes conserve their energy when
hunting to prolong the hunting duration What are the human impacts on coyotes with
respect to the two points above

1-26
Coyote Network Infrastructure
Coyote-coyote data exchange
Coyote-tower data exchange
Coyote-coyote data exchange Coyote-tower
data exchange

1-27
Collar Sensor Package
Trimble Lassen SQ GPS module
• Low power: current consumption including antenna is 40.3mA
• Not mounted on board for more freedom of placement
Off the shelf, high capacity, lithium batteries providing approximately 3000mA hours at 3V input.
Sensor Package
• Made up of two boards, the main board underneath and the sister-board on top.
• Details on next slide.
1-28
Bottom sideTop side
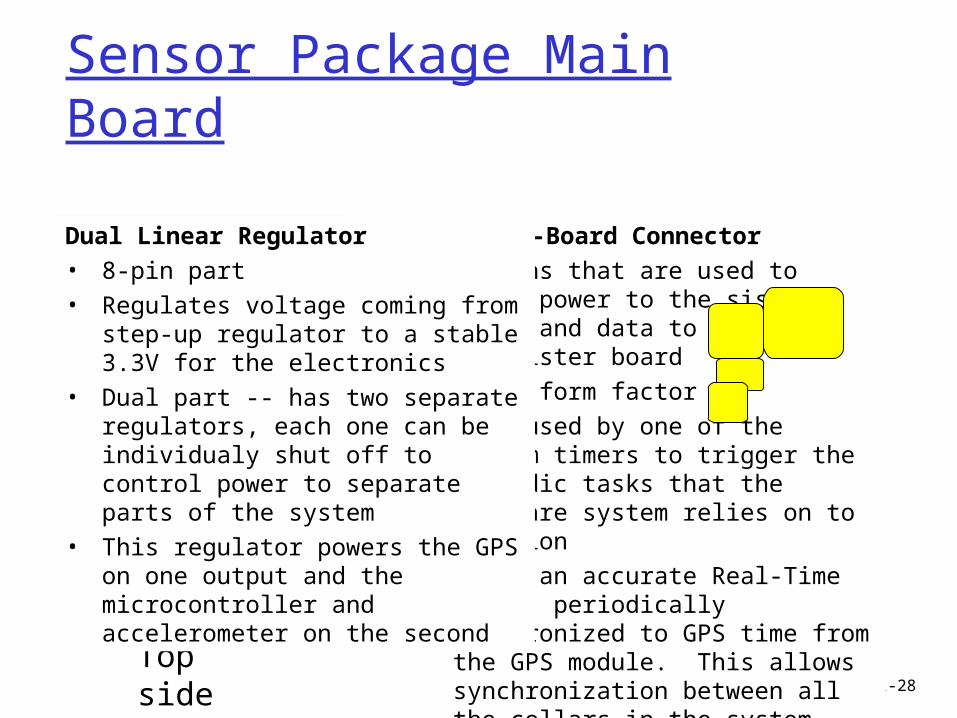
Sensor Package Main Board
MSP430F1611 microcontroller
• 10 KB RAM, 48 KB ROM
• Peripherals include:– 2 Universal synchronous/asynchronous
receive/transmit units– 12-bit Analog to Digital converter– 2 Timer peripherals that facilitate heavily
periodic tasks– 3 channel DMA controller
• Power consumption in µA range
Freescale MMA7260Q Accelerometer
• 3 orthogonal axes
• 500µA current consumption when active
• Selectable sensitivity: ±1.5/2/4/6g
• One analog output for each axis
• Small form factor
32,768Hz watch crystal
• Stable, low frequency crystal
• Used as a reference for the higher frequency Digitally Controlled Oscillator of the MSP430 to keep it stable
• Also used by one of the system timers to trigger the periodic tasks that the software system relies on to function
• Keeps an accurate Real-Time Clock, periodically synchronized to GPS time from the GPS module. This allows synchronization between all the collars in the system.
Board-to-Board Connector
• 20 pins that are used to carry power to the sister-board and data to and from the sister board
• Small form factor
Step-up Switching regulator
• 8-pin part (other two parts are an inductor and schottky diode that the regulator needs to function)
• Makes output voltage ≥ 3.3V out of an input voltage that can be as low as 1.5V -- battery source remains usable until almost fully drained
• 60 µA quiescent current
Dual Linear Regulator
• 8-pin part
• Regulates voltage coming from step-up regulator to a stable 3.3V for the electronics
• Dual part -- has two separate regulators, each one can be individualy shut off to control power to separate parts of the system
• This regulator powers the GPS on one output and the microcontroller and accelerometer on the second
1-29Top side
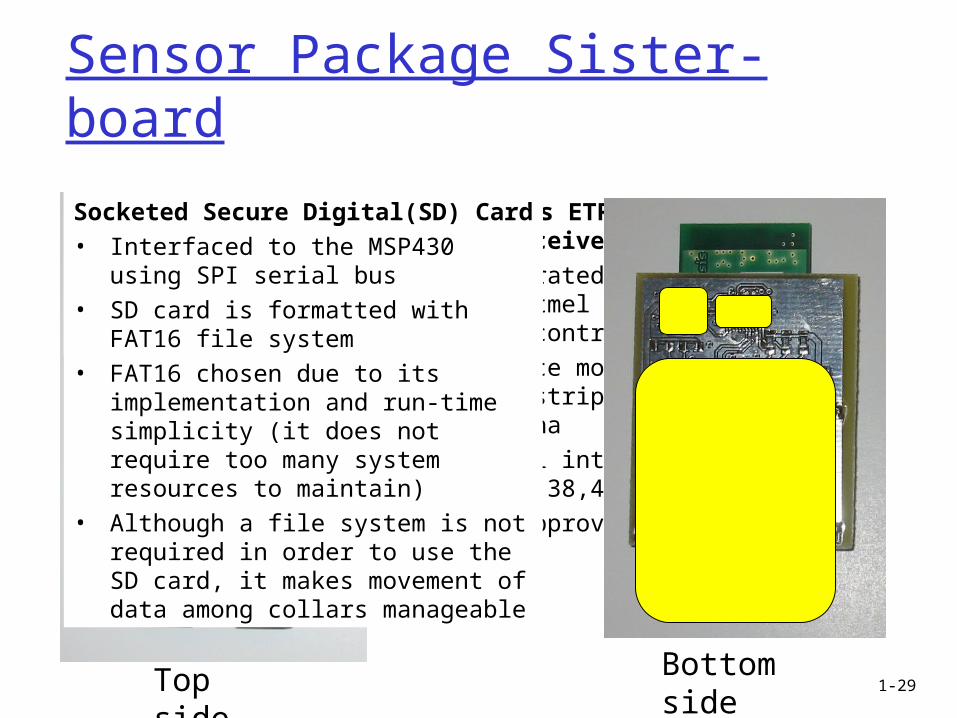
Telegesis ETRX1 ZigBee Transceiver
• Integrated Ember EM2420 radio and Atmel Atmega 128L microcontroller
• Surface mount gigaAnt microstrip small form factor antenna
• Serial interface (top baud rate: 38,400)
• FCC approved
Bottom side
Sensor Package Sister-board
Board-to-board connector
• Fits into connector on main board to establish connectivity of power and data between the two boards
Dual Linear Regulator
• This regulator powers the SD card and ZigBee radio
• The two devices can be individually shut down
Socketed Secure Digital(SD) Card
• Interfaced to the MSP430 using SPI serial bus
• SD card is formatted with FAT16 file system
• FAT16 chosen due to its implementation and run-time simplicity (it does not require too many system resources to maintain)
• Although a file system is not required in order to use the SD card, it makes movement of data among collars manageable

1-30
Acceleration Preliminary Tests Pippin, a friendly and well trained dog, was used to
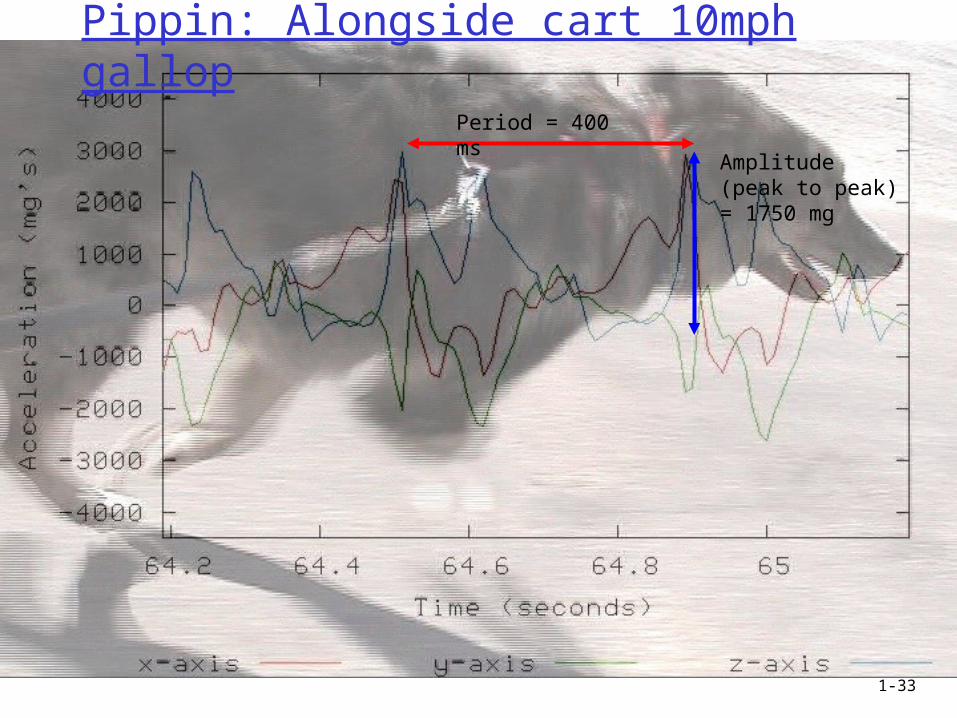
study correlations between behavior and acceleration Next 4 slides show freeze frames of Pippin running at
different speeds with acceleration graphs overlaid Different gaits (walk, trot, gallop) clearly affect
acceleration graphs Higher speeds also identifiable by higher amplitudes of
acceleration Z-axis is the up down axis, and the one used for the
brief annotations on the graphs

1-31
Pippin: Treadmill 3mph walk
Period = 360 msAmplitude (peak to peak) = 800 mg

1-32
Pippin: Treadmill 6mph trot
Period = 200 ms
Amplitude (peak to peak) = 1750 mg
1-33
Pippin: Alongside cart 10mph gallop
Period = 400 ms
Amplitude (peak to peak) = 1750 mg

1-34
Pippin: Alongside cart 15mph gallop
Period = 400 ms
Amplitude (peak to peak) = 2500 mg

1-35
Low Power Considerations
Texas Instruments MSP430 microcontroller is very low-power versatile.
ZigBee radio was designed for sensor applications with low power in mind and will not be on at all times.
GPS module will be turned on only long enough to acquire a fix and off interval will be large compared to fix-acquisition-interval.
SD card consumes significant power only during read/write operations which happen very quickly and as infrequently as possible.
Virtually all system functions are duty cycled allowing peripherals to remain on only as long as they are needed.

1-36
Data Handling Considerations
Non-fully-connected network. Not all coyotes guaranteed to come in close
proximity to base station. Collars copy data bundles of other collars in
proximity to ensure timely transmission to tower (messenger coyotes).
In absence of intelligent routing, all data is copied to all collars.
Better routing decision methods based on metrics appropriate to this system are being explored.

1-37
Future Work
Data analysis algorithm(s) to extract behavior information from raw acceleration data.
More efficient routing algorithm. Detailed system power consumption
analysis. Trial runs in controlled environment.

1-38
Meerkats: A Power-Aware, Wireless Camera Network
Joint work with R. Manduchi, C. Margi, X. Lu, G. Zhang, V. Petkov, G. Stanek
Sponsored by NASA, Intelligent Systems Program

1-39
What is Meerkats?
A small southern Africa mongoose.
Wireless camera network for surveillance and monitoring

1-40
Why camera networks?
Cameras provide richer information. Cameras have wider and longer sensing
range.
BUT:
Consume more power. Need more processing and storage.

1-41
Meerkats: Goal
Maximize performance as well as network lifetime. However, these introduce conflicting
requirements.
Approach: efficient resource management.
Complementary to efforts targeting design of low-power platforms.

1-42
Resource Management
SENSING
PROCESSING
TRANSMISSION
SENSING
PROCESSING
TRANSMISSION
Activation rateProcessing typeDuty cycle designAbstraction levelSynchronization
Activation rateProcessing typeDuty cycle designAbstraction levelSynchronization
PerformanceQoS
Lifetime
PerformanceQoS
Lifetime
Bit rateBit rateDelayDelay
System parameters Power

1-43
Meerkats hardware
Stargate boards:• XScale PXA255 CPU (400MHz):
• 32M flash, 64M DRAM.• Running Stargate v. 7.3 (embedded Linux).
1-44
Meerkats hardware (cont’d)
Orinoco Gold 802.11b wireless network card.
QuickCam Pro 4000 camera (USB port). Used at 320x240 resolution.
Custom 2-cell Li-Ion 7.4 Volt, 1 Ah battery: Connected to daughter board. DC-DC regulator to 5 Volts.

1-45
Meerkats Node

1-46
Networking
MAC: IEEE 802.11b. Dynamic Source Routing (DSR) [Johnson
et al.].• Source routing: data packets carry route
information.• Useful for future QoS control.• Plan is to extend DSR to perform alternate
path routing for QoS requirements.
• UDP and TCP at the transport layer.• UDP used to send out “alarms”.• TCP used to send out images.

1-47
Node Operation
Duty cycle based. Nodes alternate between “sleep”, low-
power- and active states. Better energy efficiency. But how about performance?

1-48
Event Detection
Goal: Capture and transmit at least one image of
any moving body in any camera’s field of view.
Current scheme: Periodic image acquisition Node-to-node wire-trapping
• Motion analysis highly desirable.

1-49
Foreground Detection
Background subtraction Build model of stationary
background. Detect pixels unlikely to
belong to background.
background
new image
foreground
subimage to be transmitteed
1-50
Power Consumption Characterization
Goal: Predict the system’s lifetime. I.e., how long a node will last if engaged in
specific activities? Representative “elementary tasks” and
“duty cucles”.

1-51
Baseline Duty Cycle

1-52
MASTERMASTER
SLAVESLAVE
Wire-tripping Duty Cycle
MASTERMASTER
SLAVESLAVE

1-53
What’s next?
Performance analysis. Miss rate given arrival rate, trajectory,
activation rate, etc.
QoS alternate path routing.
Synchronization issues.

1-54
What’s next?
Ongoing work on energy consumption prediction.
Question: Given our energy consumption
characterization, can we predict amount of energy left at a future point in time based on past activity?
Approach: probabilistic models of power consumption state space and transitions.

1-55
Power Consumption State Space
5. PROCESS PICTURE
5. PROCESS PICTURE
6. SEND ALERT/DESCRIPTOR
6. SEND ALERT/DESCRIPTOR
From other nodes
From sink
3. TAKEPICTURE3. TAKE
PICTURE2. LISTEN2. LISTEN1. SLEEP1. SLEEP
4. COMPRESS/TRANSMIT
4. COMPRESS/TRANSMIT

1-56
Yellowstone Project
Senior design project. Sensor network to monitor volcanic
activity in Yellowstone National Park. Scientists want to observe temperature
variations spatially and temporally. Detect “relevant” events.
E.g., geiser eruption.

1-57
Design Considerations
Low power. Visually and environmentally non-
intrusive. Withstand wildlife and harsh
environment. Data available readily and in real-time. Robust, self-managing, and self-healing.

1-58
System Architecture
Multi-tier network. Sensing and relay
nodes. Modularity and
extensibility.

1-59
Current Status
System under implementation. Semi-functional working prototype.
Sensing, processing, sending and receiving data.
Still working on the wireless communications capabilities.
Demonstration scheduled for final project presentations in the beginning of June.
Real deployment scheduled for Summer 2006.