computer assisted navigation and the...
TRANSCRIPT

Computer Assisted Navigation and the Aquisition of
Route and Survey Knowledge
Stefan Münzer*, Hubert D. Zimmer*, Maximilian Schwalm*, Jörg Baus+ & Ilhan
Aslan+
*Department of Psychology, Brain and Cognition Unit
+ German Research Center for Artificial Intelligence (DFKI)
Correspondance address
Dr. Stefan Münzer
Saarland University
Postfach 15 11 50
D-66041 Saarbrücken
Germany

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 2
Abstract
The incidental acquisition of spatial orientation knowledge when using a pedestrian
navigation assistance system for wayfinding was compared to incidental learning during map-
based wayfinding. First-time visitors to a real environment (a zoo) took a guided tour. In the
navigation assistance conditions, users were provided with direction information and view-
based pictures of the current intersection at each decision point, presented on a hand-held
computer. In the map-based condition, participants derived route segments from a map (each
segment comprising three or four intersections), and then walked the partial routes from
memory. After walking, unexpected tests on route memory and survey knowledge were
administered. Navigation assistance users showed good route knowledge and poor survey
knowledge. In contrast, map users showed better survey knowledge and nearly perfect route
knowledge. Variations of information presentation within navigation assistance conditions
(auditory vs. visual direction command, additional presentation of allocentric spatial
information) was not effective. Results are explained with an active encoding principle. Only
information that is actually encoded, transformed, and/or memorized during the primary
wayfinding activity, is incidentally learned. Since navigation assistance systems do not
require users to encode, transform, and memorize spatial information, the spatial orientation
knowledge of navigation assistance users is poor.

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 3
1. Introduction
When people navigate through a real environment, they might learn about the spatial
configuration of the environment incidentally, i.e. as a side effect of wayfinding. This is
particularly the case if maps are used. Maps support spatial learning in two ways. First, maps
present spatial information as an allocentric survey representation of the environment, thereby
showing the spatial relations between places within a stable reference frame. However, this
presentation is orientation specific (e.g. Rossano & Warren, 1989; Rossano & Moak, 1998).
Second, using a map for wayfinding purposes requires elaborated cognitive processing of the
spatial information to derive the route from the map. The cognitive processing presumably
involves mental rotation in order to align the map with the present view of the environment,
which may partly overcome the orientation specificity of the map. While until recently people
have commonly used maps to find their way in a novel environment, nowadays people more
and more rely on navigation assistance systems. Such systems are widely used in cars, and
pedestrian navigation assistance systems are available on mobile phones and hand-held
computers (Baus, Kray & Krüger, 2001; Baus, Cheverst, & Kray, 2005; Krüger et al., 2004;
Wasinger, Stahl & Krüger, 2003).
Navigation assistance systems are helpful and comfortable wayfinding aids because
they can indicate the to-be-adopted direction from the current position and perspective of the
user. As a consequence, the cognitive spatial processing requirement on the user's side is
minimized. Particularly when used in cars, the assistance systems are efficient wayfinding
aids that can contribute to safety. However, navigation assistance make wayfinding
comfortable and easy also for pedestrians (e.g. for tourists or business people in a foreign
city). Comfortable wayfinding assistance might furthermore be used by elderly or disabled
persons who have, for instance, difficulties in orientation in a new environment or in reading

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 4
maps. However, the acquisition of spatial orientation knowledge is nevertheless considered
desirable, for a number of reasons. First, people might simply wish to learn about the
environment they are moving through, and after a few days in a new environment, people
might wish to vary their routes, and might need less support by navigation assistance. Second,
spatial orientation knowledge helps to plan routes that comprise a sequence of places. Third,
assistance systems can fail or break down completely. Without spatial orientation knowledge,
people would be lost.
While the acquisition of spatial orientation knowledge might thus be generally
desirable, the situations in which assistance systems are used differ with respect to the
cognitive resources that can be devoted to spatial learning. In the car navigation situation, the
driver should focus on the driving, and therefore, efficiency and wayfinding comfort as well
as minimal load for the interaction with the system are the primary goals. However, effiency
and minimal load while wayfinding might not be primary goals for a tourist in a city. For
pedestrian wayfinding, spatial orientation learning could well be supported by a navigation
assistance system.
The acquisition of spatial knowledge when using a navigation assistance system might
not longer occur incidentally as a consequence of the wayfinding effort. Unlike maps,
assistance systems do not provide spatial information in a complete survey view with a stable
reference frame. It might be the case that little is learned about the spatial configuration. In
the present paper, the consequences of using navigation assistance for spatial learning of
pedestrians are investigated. The present experiment was conducted in a real environment
since it is possible that spatial learning is based on the stimuli in the environment rather than
on information shown in a map or presented by an assistance system.
Humans acquire different forms of knowledge of large-scale space, depending on the
learning experience. Route knowledge is the knowledge of places or landmarks and the routes
that connect them. The according mental representation can be conceived of as a sequence of
Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 5
view-based (egocentric) visual images of landmarks together with directions (Gillner &
Mallot, 1998). When exploring an environment solely by navigation (i.e. without a map), the
majority of people first acquire route knowledge. Since the mental representations of the
landmarks are based on views from an individual’s perspective, Aginsky, Harris, Rensinck
and Beusmans (1997) called memory for routes "visually dominated". In contrast, survey
knowledge indicates an understanding of the spatial relationships between locations. Survey
representations provide an overview over the spatial layout, based on an extrinsic frame of
reference, i.e. it is a map-like representation from an allocentric perspective (Evans, 1980;
Hart & Moore, 1973; Kitchin, 1994; McNamara, Ratcliff, & McKoon, 1984; Siegel & White,
1975; Taylor & Tversky, 1992). This so-called "mental" or "cognitive" map allows flexible
spatial orientation (e.g. drawing inferences about spatial relations between places, planning of
routes not yet travelled). In general, the acquisition of survey knowledge appears desirable for
successful and flexible orientation in an environment.
It has been proposed that with growing experience survey knowledge is developed
from route knowledge quite automatically (Siegel & White 1975; Cousins, Siegel & Maxwell,
1983; Kirasic, Allen & Siegel, 1984). However it seems that the acquisition of survey
knowledge is strategic and cognitively effortful rather than automatic. People who have
acquired their orientation knowledge solely by navigation have difficulties with spatial
judgments that require a bird’s eye view, even if they know the environment for months or
years (e.g., Thorndyke & Hayes-Roth, 1982). People differ inter-individually with respect to
preferences and strategies in building up survey knowledge from navigation experience
(Kozlowsky & Bryant, 1977; Pazzaglia & De Beni, 2001), and only a minority deliberately
choose to build up an allocentric, map-like mental representation when learning a route by
navigation, i.e. to use a "spatially dominated strategy" (Aginsky et al., 1997).
The acquisition of survey knowledge is supported by an appropriate information
format. Maps directly provide a structured model of the environment including all spatial

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 6
relations between the places in the environment. Investigations of map learning have shown
that people built up a coherent spatial mental model when studying maps (e.g. Denis &
Zimmer, 1992; Thorndyke & Hayes-Roth, 1982; Tlauka & Wilson, 1996; Rossano & Moak,
1998). In an everyday wayfinding situation, a map is used to derive a route. For this purpose,
the information from the map as a model of the environment is extracted and transformed in
order to make use of it for route derivation. For instance, the allocentric map perspective has
to be transformed into the current egocentric perspective in the real environment, and vice
versa. Thus, in the everyday wayfinding situation two presuppositions for spatial learning are
fulfilled. First, the information in the map directly provides a survey model of the
environment. Second, the information is actively processed, transformed, memorized etc.
during the wayfinding activity. This makes it probable that incidental spatial learning will
happen if people use maps for wayfinding.
When using a navigation assistance system, however, people are presented with
information that corresponds to their current perspective and view. Furthermore, depending
on the design of the system, survey information is not presented at all, might be incomplete or
might also correspond to the egocentric view. As a consequence, incidental spatial (survey)
learning seems unprobable during wayfinding. According to the transfer appropriate
processing account (Morris, Bransford, & Franks, 1977; McDaniel & Kearney, 1984) users
will learn that information that has been processed to solve the goal of wayfinding. When
using a navigation assistance system, route information (i.e. the combination of views and
directions) is processed during travel. The incidental learning effect should therefore concern
memory for the route, but not for spatial relations of places in the environment. In contrast,
when using a map, survey information has been processed during wayfinding. In addition,
using maps for wayfinding requires information transformation (as described above) while
this is not necessary when using a navigation assistance system. The rather shallow
processing of navigation assistance users should therefore result in less distinct (Jacoby,

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 7
Craik, & Begg, 1979) and less elaborated encoding (Craik & Tulving, 1975) compared to the
deeper processing of spatial information by map users. As a consequence, navigation
assistance users should have less accurate knowledge of routes and spatial relations than map
users after wayfinding in a real environment. Consistent with this expectation, moderate route
memory and only poor survey knowledge was found in navigation assistance users (Krüger,
Aslan & Zimmer, 2004). However, in this prior study no map-based wayfinding condition
was included to test directly the hypothesis of poor incidental spatial learning of navigation
assistance users.
In the present study, three different navigation assistance conditions (differing with
respect to presentation modality and the presentation of additional survey-like information)
are compared with a map-based condition in a pedestrian wayfinding situation. In the
assistance conditions, route information was always presented as view-based pictures at
intersections (i.e. pictures of the environment as seen from the participants’ current point of
view) together with a direction command. In two of three navigation assistance conditions, the
direction command was presented auditorily-verbally (i.e. as a speech command together with
the view-based picture of the intersection), while in one of the conditions, the direction was
visually indicated as a red line included in the picture of the intersection. This variation was
intended to check whether a combination of modalities (auditory-verbal plus visual) would
lead to better learning. Multimedia learning theory (e.g. Mayer & Moreno, 1998) and
cognitive load theory (Chandler & Sweller, 1991; Sweller & Chandler, 1994; Sweller, Van
Merrienboer & Paas, 1998) predict that a combination of the auditory-verbal with the visual
modality should be superior. However, recent studies conducted in our laboratory have
demonstrated a robust picture superiority effect for route learning over combinations of verbal
and pictorial information in route instructions.
Two of the three navigation assistance conditions provided additional information that
was intended to enhance spatial learning. A visual animation showed, from a bird's eye view,

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 8
the shape of the current way segment from the last intersection to the present one and its
continuation to the next intersection. Thus, the animation provided an allocentric view on
three intersections, including their spatial relations. Animations generally are thought to
enhance understanding of dynamic processes (e.g. Mayer & Anderson, 1992; Mayer &
Moreno, 2002; but see Hegarty, Kriz & Cate, 2003). In the present experiment the animations
illustrated the movement along the shape of the walked way as an aid for building the relation
between the egocentric views on the landmarks, the actual movement in the environment, and
the shape of the way seen from a bird’s eye view. It was hypothesized that this additional
context information would support the acquisition of survey knowledge.
2. Method
2.1 Participants and Design
Sixty-four subjects took part in the study (33 were female, 31 were male). The mean
age was 24 years (range 17 – 45). All participants were first-time visitors to the zoo
environment. Participants were paid for their participation. The four experimental conditions
mentioned in the introduction were realized in a between-subjects design. Sixteen participants
took part in each condition. There was the same number of female and male participants in
each of the conditions (accidentally in the map condition there were 9 females and 7 males).
2.2 Materials
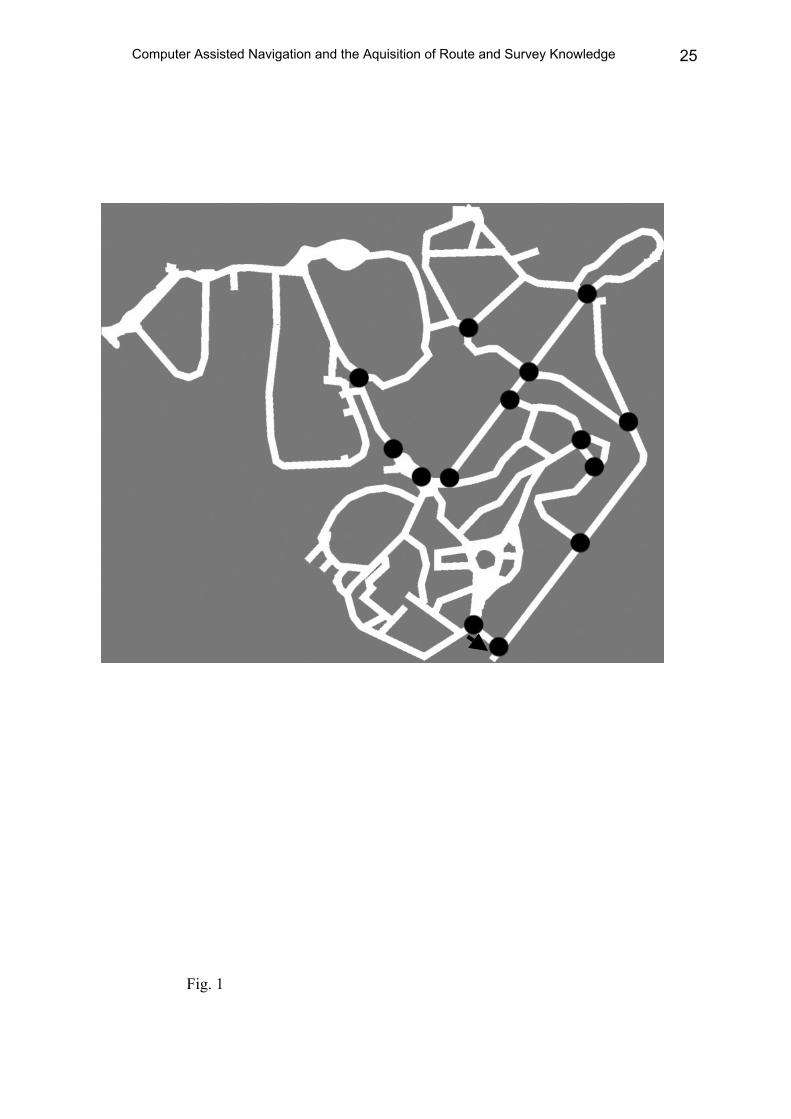
The zoo of Saarbrücken (Germany) was chosen as the real environment. A route
through the zoo was selected as the walking path. The route consisted of 16 decision points
and 15 pathway segments (see Figure 1). It was the same for all subjects in all conditions.
In three out of four conditions, participants were equipped with a personal digital
assistance (PDA) computer (Hewlett-Packard iPAQ 5450 Pocket PC). This PDA computer

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 9
served as the pedestrian navigation system. When a participant has reached a critical
intersection along the route, a picture of that intersection appeared on the screen of his/her
PDA. This picture (photograph) always corresponded to the actual view from the participants'
perspective. The PDA computer used by the participant was connected via a wireless local
area network using Bluetooth technology to another PDA computer that was used by the
experimenter. The experimenter could send a signal to the participants' PDA computer.
According to the signal, the next navigation information presentation appeared on the
participants' PDA computer screen. This signal was sent at pre-defined positions along the
route such that every participant received the navigation information at the same position.
The presentation was varied as follows:
Visual + context: Before a direction command was presented, there was a visual
animation which consisted of a partial route showing the previous, the current and the next
intersection, depicting their spatial relations from a bird's eye view. Additionally, the shape of
the way was filled with an animation effect. When the animation started, the view-based
picture of the current intersection was small, like a thumbnail-preview. It was visually
attached to the representation of the current intersection. At the end of the animation, the
attached view-based picture of the current intersection zoomed to a larger size until it filled
the entire screen (see Figure 2 a). The direction was indicated by a red line in this picture of
the intersection (as depicted in Figure 2 a).
Auditory + context: In this condition, the picture of the intersection was complemented
with an auditory-verbal command (e.g. "turn left"). There was a red dot in the picture
indicating the exact position at which the command should be applied (see Figure 2 b). In this
condition, the same spatial context animation was presented as in the visual + context
condition.

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 10
Auditory: The picture of the intersection was presented, and the direction command
was provided auditorily-verbally as in the auditory + context condition. However, no context
was presented (see Figure 2 c).
Map: In the map-based wayfinding condition, participants did not use PDAs. They
were shown a sheet of paper (DIN A 4 size) with a map fragment of the zoo. A fragment
covered a part of the original route involving three or four intersections on the route. The map
fragments only showed the shape of the ways, but no landmarks. The original route had been
broken down into four such partial routes, and for each a fragmentary map had been prepared.
Additionally, there were photographs of the three or four intersections of this part of the route
depicted on the paper. These photographs were the same as used on the PDA computers in the
navigation assistance conditions, but without location or direction information. The pictures
were numbered to indicate their order. The start and destination positions on the map were
marked, and the critical intersections (decision points) were indicated by dots (see Figure 3).
With this information the to-be-adopted route could be inferred. The presentation of the map
fragment required participants to find their way from a map under controlled conditions and
similar landmark information as in the navigation assistance conditions (i.e. pictures of the
intersections).
The knowledge acquired by the participants was tested with a route recognition test
and a test on survey knowledge. In the route recognition test, the ability to remember the
correct direction given a picture of an intersection was tested. The same pictures that were
presented during the walk were presented without any direction information on a tablet PC
(Acer Travelmate C110) in randomized order. The images contained sensitive areas marked
by red rectangles that could be tabbed by the subjects to indicate the direction they had taken
at each decision point (see Figure 4). There were 13 items in the route recognition test for
which the participant had to choose among two alternatives. There were three items in the test
for which the participant had to choose among three alternatives.

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 11
Survey knowledge was tested by a spatial relocation task. In this task, thumbnail
pictures of the intersections had to be placed at their correct locations on a roadmap of the
zoo. No landmarks were shown on this map. The pictures were the same as used in the route
recognition test. Subjects were presented with the map on a tablet PC (Acer Travelmate C110)
and they had to drag and drop the pictures of the intersections on the map (see Figure 5).
The software for the pedestrian navigation system on the PDA computers as well as
the route recognition and the survey knowledge test software on the tablet PC was developed
and provided for the present study by the German Research Center for Artificial Intelligence
(DFKI, Saarbrücken, Germany).
2.3 Procedure
The experiment consisted of two parts. The guided walk realized the incidental study
phase and afterwards, the two tests were administered. Participants were not informed that
they would be tested for route and survey knowledge. The study was introduced as a usability
study of navigation assistance systems.
In the three navigation assistance conditions, the PDA computer was handed to the
subject. In the auditory-verbal conditions, subjects wore one in-ear earphone. During the tour,
the experimenter followed with a separate PDA computer at a distance of about 10 meters.
When the subject has passed a pre-defined position, the experimenter sent a signal from
his/her PDA computer to the subjects' PDA computer. The subjects' PDA computer then
presented the relevant information for the approached intersection (the view-based picture of
the current intersection, direction information and animation) dependent on the condition. In
the map-based wayfinding condition, the participant was shown a map fragment. The
participant had to infer which direction he/she would have to go at the intersections, and
he/she was asked to indicate the direction by drawing an arrow on the picture for each of the
intersections. The participant was asked to memorize the directions and the views of the three
Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 12
or four intersections for this segment of the walk. The map fragment then was taken away,
and the participant walked the partial route from memory. This procedure was repeated for all
four route segments until they the original route was completed. Walking the tour in the zoo
environment took approximately 25 minutes.
In the test phase, the route recognition test was administered first, followed by the
survey knowledge test. Both tests were given to the participants after the study phase. Neither
in the route recognition test nor in the survey knowledge test there was a time limit for giving
the answer in a particular trial. Only accuracy performance was calculated. Since there was no
laboratory room available in the zoo, participants completed the tests using a tablet PC
suitable for outdoor use. Testing lasted about 25 minutes.
3. Results
Route memory performance was evaluated on the basis of the number of correctly
remembered directions in the route recognition test. Overall, participants performed quite well
in this test (7 % to 25 % errors; see Table 1). The 95 % confidence intervals do not overlap
with chance performance (see Figure 6), which is about 50 %. The four conditions differed. A
one-way between subjects analysis of variances with navigation condition as factor revealed a
significant difference for the relative number of false directions, F (3, 60) = 7.14,
MSE = 0.0135, p < 0.001. No significant difference was obtained between the three
conditions in which navigation assistance was used (F (2,45) = 0.85), and also all pair-wise
comparisons were far from significance. However, route memory after map-based wayfinding
was significantly better than after walking guided by navigation assistance (F (1, 60) = 19.54,
MSE = 0.0135, p < 0.001). Thus, route memory performance was good in the navigation
assistance conditions, but it was nearly perfect in the map-based wayfinding condition. An
additional analysis including gender as factor yielded no significant gender effects for route
memory performance.

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 13
In the survey knowledge test, subjects had to replace thumbnail pictures of the
intersections onto a roadmap of the zoo. For evaluating the accuracy of survey knowledge, the
deviations of the replacement from the correct place on the map were measured in pixels, and
all deviation values were subsequently averaged. One subject had to be excluded from the
data set due to missing data. Inspection of the descriptive results already showed that survey
knowledge was quite poor in all experimental conditions in which participants had used
navigation assistance. Deviation values of up to 200 pixels for the replacement of an
intersection on a complete roadmap of the zoo that had been shown as a picture with 1024 x
768 pixels mean quite poor accuracy. In contrast, the mean deviation value in the map-based
wayfinding condition was about 78 pixels which indicates a considerably better replacement
performance. This impression was confirmed in an one-way between subjects analysis of
variance with navigation condition as factor, which revealed a significant difference for the
mean deviation in pixel, F (3, 59) = 8.31, MSE = 5462, p < 0.001. A planned contrast showed
that the map-based wayfinding condition differed significantly from the three navigation
assistance conditions, F (1, 59) = 22.85, MSE = 5461.6, p < 0.001). However, no significant
differences were obtained between the three conditions in which navigation assistance was
provided, F (2, 44) = 0.95, and also no pair-wise comparison was significant. Again gender
did not influence these results.
These data might suggest that the difference between the map condition and the
assistance conditions were larger for the survey knowledge than for the route recognition
performance. A comparison of effect sizes using Cohen's d revealed that this was not true.
The size of the effect of the map condition compared with the mean of the assistance
conditions was d = 1.347 for route recognition performance, and the same comparison
revealed d = 1.513 for survey knowledge. Thus, the effect of the map condition was strong,
and the effect did not differ considerably with respect to the dependent variable (route
recognition vs. survey knowledge).

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 14
4. Discussion
The main hypothesis that motivated the present experiment was that using a navigation
assistance system results in poor spatial memory, because subjects would incidentally learn
only that information they have dealt with during the wayfinding activity. It was therefore
expected that users of navigation assistance systems would acquire route knowledge, but their
memory for spatial survey information would be poor. In contrast, it was hypothesized that
map users would acquire both route and survey knowledge as a side effect of their wayfinding
effort. The pattern of results supports these hypotheses. Map users acquired better survey
knowledge as well as better route knowledge, compared to the knowledge acquired by
assistance users. However, more specific hypotheses regarding the effects of presentation
modes by a navigation assistance system on memory were not confirmed.
It has been expected that the acquisition of survey knowledge would be enhanced by a
visual animation of the spatial context because an allocentric perspective is thereby presented
in addition to the egocentric view. Due to results from explicit route learning, it has been
furthermore assumed that visual presentation of direction information would be superior over
an auditory presentation. None of these manipulations of the presentation format did influence
learning in the real environment. All three assistance groups showed comparable results. Our
explanation is that these manipulations were inefficient because the information provided was
not “actively” processed by the pedestrians. The provided information was not needed for the
primary goal of wayfinding. Since participants did not know that remembering would be
relevant, they "passively" used the readily available direction information for navigation. In
other words our attempts to enhance spatial information presentation did not overcome the
less elaborated mode of processing of the navigation assistance users during their wayfinding
activity. The observation of poor spatial orientation knowledge under these circumstances is
in line with the view that spatial learning is an effortful and error-prone process (e.g.
Thorndyke & Hayes-Roth, 1982; Aginsky et al., 1997; Gillner & Mallot, 1998).

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 15
Map users not only acquired better survey knowledge but they also acquired better
route knowledge, which additionally supports an “active learning hypothesis”. We assume
that this learning advantage comes from the additional active effort that map users invested in
dealing with the route information during wayfinding. Unlike the assistance users the map
users had to derive the direction information by relating the pictures of the intersections to the
marked intersections on a fragmentary map (thereby processing mental spatial
transformations) and, by walking a route segment from memory, they had to keep the to-be-
adopted direction for the current segment in working memory. These processes are likely to
enhance memory encoding and consolidation. Studies manipulating cognitive load show that
working memory is indeed involved in spatial learning tasks (e.g. Lindberg & Gärling, 1981;
Rossano & Moak, 1998). More specifically, visuo-spatial working memory (Logie, 1995) –
which is viewed as a specialized working memory component within the tripartite working
memory model of Baddeley (1986) – is thought to play an important role in spatial orientation
(Smyth & Waller, 1998; Garden, Cornoldi & Logie, 2002; Bosco, Longoni & Vecchi, 2004;
Coluccia & Louse, 2004; Coluccia & Martello, 2004). In the map condition these working
memory processes should leave 'traces' for long-term memory. Moreover, if working memory
is viewed as an activated sub-set of long-term memory (e.g., Cowan, 1988, 1995), more
elaborated working memory structures should lead to better (i.e. more elaborated and highly
accessible) long-term memory structures.
We thus consider the active encoding explanation as the most likely reason for the
superior spatial orientation knowledge of the map users. An alternative explanation would be
that survey views were more familiar for the map users than for the assistance groups since
they had studied map fragments. Map users might remember the allocentric views and match
memory of the shape of the ways on a studied fragment with the shape of ways on the
complete map during testing (however this is considered difficult given the complex map
without any landmarks that was used in the test). Admittedly, this argument is a consequence

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 16
of our dependent measure of survey knowledge, which involved using a roadmap of the zoo
for the relocation of places. Other, additional measures such as a pointing test or sketch maps
could have helped to further substantiate the difference between assistance and map users.
However, the measure used in the present study reflects everyday spatial learning and
retrieval. Both learning and retrieval of spatial orientation knowledge involves moving
through and thereby studying the real environment as well as studying a map (as travelers
often do) that represents it. In other words, the perception of the real environment and the
cognitive processing of internal and external representations of it are intertwined both when
learning and when retrieving spatial information in everyday orientation. From our point of
view, the decisive point is that map users actively dealt with the information presented, and
not that they matched roadmap fragments seen in the study phase. This argument is supported
by the fact that assistance users also had spatial context information available during
wayfinding. The visual animations that were provided in two of the assistance conditions
comprised three intersections and the shape of the ways connecting them from an allocentric
perspective. That is, the assistance users also saw roadmap fragments. Nevertheless survey
memory of the navigation assistance users was poor. This suggests that the presence of survey
information does not suffice. The information has to be used during walking to become
effective for spatial learning.
Finally, one might speculate that participants reconstruct survey knowledge from route
memory. They might solve the replacement task by relating the remembered view-based
pictures to the bird's eye perspective shown on the roadmap at the time of test, i.e., they
mentally walk the route again and try to find the appropriate intersections on the map by
transforming the egocentric perspective of a particular intersection into an allocentric
perspective. This strategy would have been possible since the start position was provided as a
reference point on the map in the replacement task. Direction knowledge (i.e. in which
direction one walked at a particular intersection) would help to successfully solve the

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 17
replacement task. However, this presupposes that the order of intersections is remembered
without errors, since after a single mistake all subsequent reconstructions would be wrong.
There is no indication in the data that participants applied such a strategy, neither in the
assistance nor in the map conditions. Participants misplaced intersections at the beginning of
the walk in the same way as they misplaced intersections later on the route. Performance was
generally poor independent of the serial position. On the contrary, when making an attempt to
describe the observed replacement behavior of the participants, it resembles more a
reconstruction of configurations by provisional placements and replacements than by
following an explicit strategy. Finally, if the strategy would have been actually applied, then
both navigation assistance users and map users should have been successful in the
replacement task. Because the data show a clear advantage of map users, we therefore believe
that the better performance of map-users in the replacement test is a consequence of the better
memory of survey information acquired during wayfinding.
In summary, the present study puts forward an extended focus on the design of
navigation assistance systems including their consequences for memory and for acquisition of
spatial orientation knowledge. The design of navigation systems is usually optimized with
respect to cognitive ergonomics during wayfinding. Direction information is provided in a
way such that navigation is as easy as possible. This may have consequences on spatial
learning, which is rarely discussed. We hypothesized that navigation assistance systems
reduce spatial processing to a minimum, and consequently spatial knowledge would be poor.
Our data confirm this hypothesis. Both survey and route knowledge were considerably better
in the map guided group than in the navigation assistance groups. Hence, if spatial learning
would be relevant for users – e.g. for tourists, but also for elderly and/or disabled persons –, it
is necessary to adopt the design in a way that the acquisition of spatial orientation knowledge
is also supported. The presentation of additional allocentric information using animations
and/or the manipulation of presentation modality did not work in the present real environment

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 18
study. We assume that those manipulations were inefficient because they did not initiate
active encoding. It remains therefore a challenge for intelligent human-computer interaction
design to find a way to both present information and to require the user to deal actively with
this information. It might be suggested that for spatial learning, route instructions and working
with maps with the requirement of some spatial processing could be combined. Such a
specific combination – taking an individual's preferences and spatial strategies into account –
may stimulate and support the acquisition of spatial orientation knowledge.
Acknowledgments
This research was supported by a grant from the Deutsche Forschungsgemeinschaft in
a Special Collaborative Research Group on Resource Adaptive Cognitive Processes (SFB
378) to Hubert Zimmer. We wish to thank three anonymous reviewers for valuable comments
on this paper. Correspondence concerning this article should be addressed to Stefan Münzer
or Hubert Zimmer, Dept. of Psychology, Saarland University, P. O. Box 151150, D-66041
Saarbrücken, Germany. Electronic mail should be addressed to [email protected]
saarland.de or [email protected].

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 19
References
Aginsky, Harris, Rensink, Beusmans (1997). Two strategies for learning a route in a
driving simulator. Journal of Environmental Psychology, 17, 317-331.
Baddeley (1986). Working Memory. Oxford: University Press.
Baus, J., Kray, C., & Krüger, A. (2001). Visualization of route descriptions in a
resource-adaptive navigation aid. Cognitive Processing, 2, 323-345.
Baus, J., Cheverst, K., & Kray, C (2005). A survey of map-based mobile guides.
Meng, & Zipf (eds.), Map-based Mobile Services - Theories, Methods and Implementations,
pp. 197-213. Berlin, Heidelberg: Springer.
Bosco, A., Longoni, A. M., Vecchi, T. (2004). Gender effects in spatial orientation:
Cognitive profiles and mental strategies. Applied Cognitive Psychology, 18, 519-532.
Chandler, P., & Sweller, J. (1991). Cognitive load theory and the format of instruction.
Cognition and Instruction, 8, 293-332.
Cousins, J. H., Siegel, A. W., & Maxwell, S. E. (1983). Way finding and cognitive
mapping in large-scal environments: a test of a developmental model. Journal of
Experimental Child Psychology, 35, 1-20.
Coluccia, E., & Louse, G. (2004). Gender differences in spatial orientation: A review.
Journal of Environmental Psychology, 24(3), 329-340.
Coluccia, E., & Martello, A. (2004). Il ruolo della memoria de lavoro visuo-spaziale
nell'orientamento geografico: uno studio correlazionale. Giornale italiano di psicologia, 3,
523-552.
Cowan, N. (1988). Evolving conceptions of memory storage, selective attention, and
their mutual constraints within the human information processing system. Psychological
Bulletin, 104, 163-191.

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 20
Cowan, N. (1995). Attention and memory: An integrated framework. New York:
Oxford University Press.
Craik, F. & Tulving, E. (1975). Depth of processing and the retention of words in
episodic memory. Journal of Experimental Psychology: General, 104(3), 268-294.
Denis, M., & Zimmer, H. D. (1992). Analog properties of cognitive maps constructed
from verbal descriptions. Psychological Research, 54, 286-298.
Evans, G. W. (1980). Environmental cognition. Psychological Bulletin, 88, 259-287.
Garden, S., Cornoldi, C., & Logie, R. H. (2002). Visuo-spatial working memory in
navigation. Applied Cognitive Psychology, 16, 35-50.
Gillner, S. & Mallot, H.P. (1998). Navigation and acquisition of spatial knowledge in a
virtual maze. Journal of Cognitive Neuroscience, 10(4), 445-463.
Hart, R. A., & Moore, G. T. (1973). The development of spatial cognition: A review.
In R. M. Downs and D. Stea, Eds., Image and Environment, pp. 246-288. Chicago: Aldine.
Hegarty, M., Kriz, S., & Cate, C. (2003). The roles of mental animations and external
animations in understanding mechanical systems. Cognition and Instruction, 21, 325-360.
Kirasic, K. C., Allen, G. L., & Siegel, A. W. (1984). Expression of configurational
knowledge of large-scale environments: Student’s performance of cognitive tasks.
Environment and Behavior, 16, 687-712.
Kitchin, R. M. (1994). Cognitive maps: What are they and why study them? Journal of
Environmental Psychology, 14, 1-19.
Kozlowsky, & Bryant, (1977). Sense of direction, spatial orientation, and cognitive
maps. Journal of Experimental Psychology: Human Perception and Performance, 3(4), 590-
598.
Krüger, A., Aslan, I., & Zimmer, H. D. (2004). The Effects of Mobile Pedestrian
Navigation Systems on the Concurrent Acquisition of Route and Survey Knowledge. Mobile
HCI, 2004, 446-450.

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 21
Krüger, A., Butz, A., Müller, C., Stahl, C., Wasinger, R., Steinberg, K. E., & Dirschl,
A. (2004). The connected user interface: Realizing a personal situated navigation service.
Proceedings of the 9th International Conference on Intelligent User Interfaces, 2004, 161-
168.
Lindberg, E. & Gärling, T. (1981). Acquisition of locational information about reference
points during locomotion with and without a concurrent task: Effects of number of reference
points. Scandinavian Journal of Psychology, 22, 109-115.
Logie, R. H. (1995). Visuo-spatial working memory. Hillsdale: Earlbaum.
Mayer, R. E., & Anderson, B. A. (1992). The instructive animation: Helping students
build connections between words and pictures in multimedia learning. Journal of Educational
Psychology, 84, 444-452.
Mayer, R. E., & Moreno, R. (1998). A split-attention effect in multimedia learning:
Evidence for dual processing systems in working memory. Journal of Educational
Psychology, 90, 312-320.
Mayer, R. E., & Moreno, R. (2002). Animation as an aid to multimedia learning.
Education Psychology Review, 14, 87-99.
McDaniel, M. A., & Kearney, E. M. (1984). Optimal learning strategies and their
spontaneous use: The importance of task-appropriate processing. Memory & Cognition, 12, 361-
373.
McNamara, T. P., Ratcliff, R., & McKoon, G. (1984). The mental representation of
knowledge acquired from maps. Journal of Experimental Psychology: Learning Memory and
Cognition, 10, 723-732.
Morris, C.D., Bransford, J.D. & Franks, J.J. (1977). Levels of processing versus transfer
appropriate processing. Journal of Verbal Learning & Verbal Behavior, 16, 519-533.
Pazzaglia, F. & De Beni, R. (2001). Strategies of processing spatial information in survey
and landmark-centered individuals. European Journal of Cognitive Psychology, 13, 493-508.

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 22
Rossano, M. J., & Moak, J. (1998). Spatial representations acquired from computer
models: Cognitive load, orientation specificity and the acquisition of survey knowledge.
British Journal of Psychology, 89, 481-497.
Rossano, M. J., & Warren, D. H. (1989). Misaligned maps lead to predictable errors.
Perception, 18(2), 215-229.
Siegel, A. W. & White, S. H. (1975). The development of spatial representations of
large-scale environments. In H.W. Reese (Ed.), Advances in Child Development and Behavior
Vol. 10 (pp. 9-55). New York: Academic Press.
Smyth, M. M, & Waller, A. (1998). Movement imagery in rock climbing: Patterns of
interference from visual, spatial, and kinaesthetic secondary tasks. Applied Cognitive
Psychology, 12, 145-157.
Sweller, J., & Chandler, P. (1994). Why some material is difficult to learn. Cognition
and Instruction, 12, 185-233.
Sweller, J., van Merrienboer, J. J. G., & Paas, F. G. W. C. (1998). Cognitive
architecture and instructional design. Educational Psychology Review, 10, 251-296.
Taylor, H. A., & Tversky, B. (1992). Spatial mental models derived from survey and
route descriptions. Journal of Memory and Language, 31, 261-292.
Thorndyke, P.W., & Hayes-Roth, B. (1982). Differences in spatial knowledge acquired
from maps and navigation. Cognitive Psychology, 14, 560-589.
Tlauka, M., & Wilson, P. N. (1996). Orientation-free representations from navigation
through a computer-simulated environment. Environment & Behavior, 28, 647-664.
Wasinger, R., Stahl, C., & Krüger, A. (2003). M3I in a pedestrian navigation &
exploration system. Proceedings of the Fourth International Symposium on Human Computer
Interaction with Mobile Devices, 2003, 481-485.
Zimmer, H. D. (2004). The construction of mental maps based on a fragmentary view
of physical maps. Journal of Educational Psychology, 96, 603-610.

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 23
Table 1. Results of the route recognition test and the survey knowledge test.
Route recognition
(percent error)
Survey knowledge
(deviation in pixels)
Condition Mean SD Mean SD
Visual + context 25 % 15 % 192 80
Auditory + context 20 % 10 % 186 79
Auditory 22 % 11 % 155 82
Map 7 % 10 % 75 52

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 24
Figure 1. The roadmap of the real environment (a zoo) with the intersections of
the route designed for the present study.
Figure 2. The navigation assistance conditions differing with respect to the
modality of the direction command (auditory vs. visual) and the presentation of an
additional visual animation for providing spatial context; (a) visual command with
spatial context, (b) auditory ommand with spatial context, (c) auditory command
without spatial context.
Figure 3. Example of the materials used in the map condition for wayfinding
(map fragment and photographs of intersections).
Figure 4. The route recognition test (example). Participants could indicate the
correct direction by clicking into one of the marked boxes.
Figure 5. The survey knowledge test (replacement task).
Figure 6. Result of the route memory test (mean percent error). Vertical bars
denote 95 % confidence intervals.
Figure 7. Result of the survey knowledge test (mean deviation in pixels).
Vertical bars denote 95 % confidence intervals.
Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 25
Fig. 1

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 26
(a)
(b)
(b)
(c)
Fig. 2

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 27
Fig. 3

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 28
Fig. 4

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 29
Fig. 5

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 30
visual+context auditory+context auditory map0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
perc
ent e
rror
Fig. 6

Computer Assisted Navigation and the Aquisition of Route and Survey Knowledge 31
visua l+context auditory+context auditory m ap0
20
40
60
80
100
120
140
160
180
200
220
240
260de
viat
ion
in p
ixel
s
Fig 7