dc stepper motor typical use: position control relative position (without feedback) easy to control:...
TRANSCRIPT
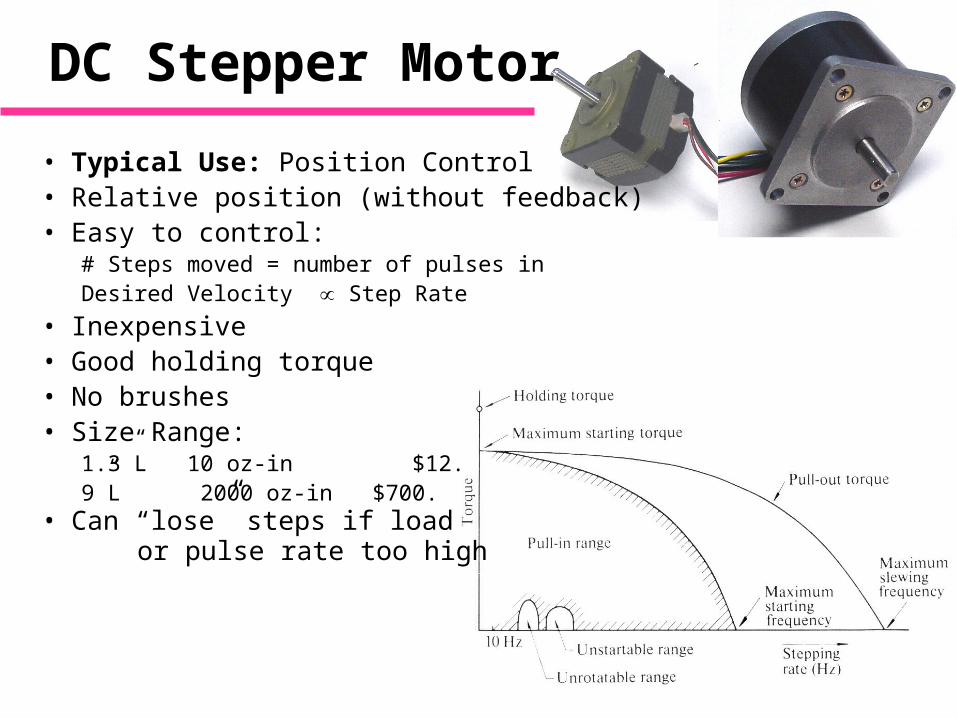
DC Stepper Motor
• Typical Use: Position Control• Relative position (without feedback)• Easy to control:
# Steps moved = number of pulses inDesired Velocity Step Rate
• Inexpensive• Good holding torque • No brushes• Size Range:
1.3”L 10 oz-in $12.9”L 2000 oz-in $700.
• Can “lose” steps if load or pulse rate too high

Permanent Magnet DC Motor
• Typical Use: Variable Speed ControlPosition control is possible but requires additional
hardware
• Usually used with position or velocity feedback (optical encoder or tachometer)
• Control: Speed Input voltage (DC or PWM)
• Reduction gear heads common• Brushes wear out, spark, cause RFI• Size Range:
Micro 0.5” L x 0.2”D (pager vibrator) $5Big 13”L x 4”D 2 HP $1000
aTEaa
TLoad IKKV
R
KT
RPM
Torq
ue
V1
V2 >V1

Torq
ue
Stepper Motor Speed vs Torque
No lost steps w/acceleration
(slewing) control
No lost steps w/o acceleration
control
Lost steps (stall)
Step Rate
time
fmax
fmax
TLOAD
Step Rate - Hz ( Desired RPM)
Ref. (Figure 2.75), T. Kenjo, Stepping motors and their microprocessor controls, Oxford Press, 1984