ditcm 30 maart
TRANSCRIPT

Traffic Flow Theory for Cooperative Systems Serge Hoogendoorn (TU Delft)Meng Wang, Andreas Hegyi, and Henk Taale

• Increasing automation leads to fundamental changes in the network traffic flow characteristics, which go far beyond changes in roadway capacity (stability, queue dynamics, heterogeneity)
• These changes affect traffic and transportation flow theory and its use, which will in turn impact:
• Modelling and simulation (assessment) tools adequate to test impact of cooperative systems and automation
• Design of new systems, including advanced traffic management (V2I)
• Illustration by means of 2 case studies
Impacts of Cooperative Systems and Automation Fundamental Changes in Network Traffic Flow Operations
Impact assessment and Traffic Management implications

• Motivation study: many control approaches used to determine C-ACC car-following are based on simple feedback control laws / constant (time-) gap policies
• Approaches often miss certain desirable features, such as:
• Optimisation (that is: explicit optimisation of an objective function)
• Flexible choice control objectives (e.g. safety, efficiency, emissions, fuel)
• Inclusion of future conditions / anticipation on behaviour of non-equipped vehicles
• Integration within comprehensive traffic management architecture (V2I part)
• Aim of PhD research of Meng Wang was to develop a generic multi- objective control approach based on MPC (Model Predictive Control), while being fast and robust enough for real-time application
• We start with the (simple) platooning problem for mixed vehicle platoons…
Case II: Multi-Objective Cooperative Platooning A Novel Control Methodology for Platooning (and Merging)
Beyond Overly Simple Control Approaches

• Use sensors to determine current state of ‘controlled’ platoon (controlled & non-controlled vehicles), e.g. positions, headways, (relative) speeds
• Given the current situation, predict how system would evolve if we would apply certain control signal (acceler. controlled vehicles) for upcoming period
• Predict behaviour of controlled vehicles (trivial!)
• Predict behaviour of non-controlled vehicles using some (more or less) realistic car-following model (e.g. IDM+, Helly)
• Given predicted state, we compute predicted cost
• Look for minimising J, and apply, until new state is available ( )
Multi-Objective Cooperative Platooning New Control Methodology for Platooning & Merging
Model Predictive Control paradigm for Cooperative Platooning
!x(t)
!u[t ,T )
J = J(!x[t ,T ) )= J(!x(t), !u[t ,T ) )!u[t ,T )
* !x(t +Δt){ri (t),vi (t)} {ri−1(t),vi−1(t)}
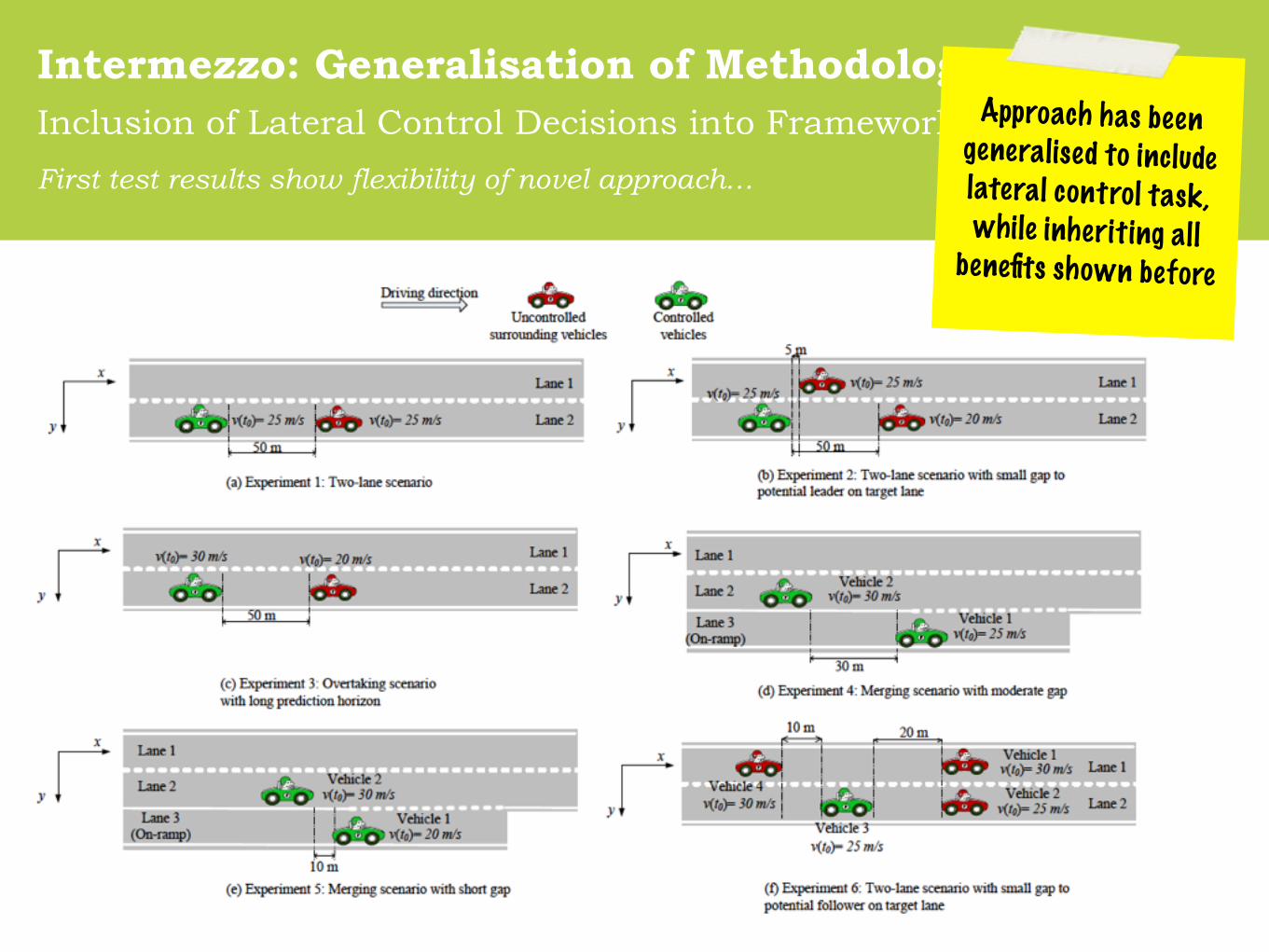
Intermezzo: Generalisation of Methodology Inclusion of Lateral Control Decisions into Framework
First test results show flexibility of novel approach…
Approach has been generalised to include lateral control task, while inheriting all
benefits shown before

• J can describe different objectives:
• Optimal solutions can be computed RT using novel optimisation algorithm
• Note that optimal solutions consider: a) future flow conditions and b) expected response of non-equipped drivers
• Example results (for a combined objective)
The Case: Multi-Objective Cooperative Platooning A Novel Control Methodology for Platooning and Merging
Model Predictive Control paradigm for Cooperative Platooning
!u[t ,T )*
J = J(u[t ,T ) )= c1Jsafety + c2Jefficiency + c3J fuel + ...
Even at low penetration levels, C-ACC impacts are
substantial (e.g. jam duration, fuel consumption)

• Resulting driving behaviour yields changes in fundamental diagram shape!
• Stability analysis provides further insight into changes in flow characteristics
• Stability of MO-ACC can be improved by increasing the ‘weight of safety costs’
Traffic flow characteristics? Study of traffic flow properties
Stability and shockwave speeds
MO-ACC stability regions
J = J(u[t ,T ) )= c1Jsafety + c2Jefficiency + c3J fuel + ...

• Analyse impacts of C-ACC using simulation
• Consider scenario in which shockwave is generated (‘Spookfile’)
• Dashed line indicates “all human driver” case
• Shockwave speed depends on penetration rate (line becomes steeper as shockwave speed increases):
• Capacity drop reduction causes shockwave to dissipate quickly for higher penetrations
• Nonetheless, high shockwave speeds may negatively impact safety for human drivers!
• Stability analyses shows fundamental changes in perturbation dynamics!
Traffic flow characteristics? Study of traffic flow properties
Stability and shockwave speeds

Implications for V2I Application of Specialist in ACC control approach
• Specialist shockwave suppression using VMS
• Successfully tested on A12
• In-car application?

• Important note: modification of Specialist control algorithm required to incorporate changes in flow operations for different penetration levels
Cooperative version using V2I Application of shockwave suppression algorithm
V2I approach allows application at different penetration rates
Importance of including changing
flow characteristics in V2I algorithmic
design!

• Increased automation in traffic flow will make traffic flow operations less volatile and heterogeneous due to shorter response times, fewer driving rules, etc.
• Does traffic flow theory become easier? Flow operations are more predictable, because driving rules are known, still, generalisation to ‘flows’ is not trivial per se!
• Also in the transition to full automation, many modelling challenges remain:
• User response (human drivers) to (partially) automated vehicles (urban / freeway)
• User response in case of system failure
• Design of driver support / automation approaches taking into account achieving desirable traffic flow (i.e. macroscopic) operations!
The Future of Traffic Flow Theory From Unravelling Human Behaviour to Supporting System Design
And a whole range of new challenges in the meantime!
(c) Prof. M. Zhang
Click here if time has ran out

• Advanced Information Services are assumed to improve network wide flow conditions, but actually bring system closer to user-equilibrium (which may be good, or which may be bad depending on network structure, conditions)
• Known fact = expected differences in travel time between system optimum and user equilibrium unto 30% (depending on demand levels)
• When assessing new measures, changes in system responses need to be carefully taken into account…
• But also in designing new measures, taking into account system responses can enable large benefits!
• Let us consider a simple Intelligent Intersection Control Example…
Case I: Impact of Advanced Travel Information Services Expected Impacts and System Response Changes
And how we can benefit from careful consideration!
80%100%120%140%160%180%200%220%240%
80% 130% 180% 230%vraagfactor
% g
emid
deld
e re
istijd
SOUE
% o
f re
fere
nce
trav
el t
ime
demand factor

• Case with 2 OD pairs and perfectly informed traveler from A to B having 2 options
• Intelligent intersection controller optimises locally capacity use at intersection evenly (equal delays for both directions)
• Most travellers choose route 2 under normal circumstances
• Event (incident) occurs; flow conditions route 2 worsen (from 120 to 80 km/h)
Case I: Impact of ATIS Anticipating Cooperative Intelligent Intersections
Need of including traveler response into the design
A
C
D
BRoute 1
Route 2
• Route 1 becomes more attractive for A-B travellers (more people choose route 1)
• Intersection controller assigns more capacity to A-B travellers due to increased demand
• Route 1 becomes more attractive for A-B travellers; situation worsens form C-D travellers
Quiz: what happens?

• Case with 2 OD pairs and perfectly informed traveler from A to B having 2 options
• Intelligent intersection controller optimises locally capacity use at intersection evenly (equal delays for both directions)
• Most travellers choose route 2 under normal circumstances
• Event occurs why route 2 conditions worsen (e.g. incident, roadworks)
A
C
D
BRoute 1
Route 2
Case I: Impact of ATIS Anticipating Cooperative Intelligent Intersections
Need of including traveler response into the design
perc. choice route 1
traffi
c co
ntro
ller
total delays
0 0.1 0.2 0.3 0.40
0.1
0.2
0.3
0.4
0.5
1
2
3
4
5
6
x 105
Total delays in system increase with about 30%
Start
1
2
3

• Intelligent intersection control should anticipate on traveller responses to changing control and network conditions
• Doing this in an intelligent manner enables allowing steering the system state near the system optimum, without explicitly steering travellers (travellers only respond to predicted system state)
Start
1
3
Case I: Impact of ATIS Anticipating Cooperative Intelligent Intersections
Need of including traveler response into the design
Conclusion: intelligent intersection control can be designed to achieve good network performance if it anticipates correctly on travel responses due to advanced information services
No anticipation on traveler response

• Increasing automation leads to fundamental changes in the network traffic flow characteristics, which go far beyond changes in roadway capacity (stability, queue dynamics, heterogeneity)
• These changes affect traffic and transportation flow theory and its use, which will in turn impact:
• Modelling and simulation (assessment) tools adequate to test impact of cooperative systems and automation
• Design of new systems, including advanced traffic management (V2I)
• Illustration by means of 2 case studies
Questions?
Impacts of Cooperative Systems and Automation Fundamental Changes in Network Traffic Flow Operations
Impact assessment and Traffic Management implications