ece 667 - synthesis & verification - lecture 2 1 ece 667 spring 2011 ece 667 spring 2011...
TRANSCRIPT

1
ECE 667 - Synthesis & Verification - Lecture 2
ECE 667ECE 667Spring 2011Spring 2011
Synthesis and Verificationof Digital Circuits
High-Level (Architectural)High-Level (Architectural)
SynthesisSynthesis

ECE 667 - Synthesis & Verification - Lecture 2 2
High Level Synthesis (HLS)High Level Synthesis (HLS)
• The process of converting a high-level description of a design to RTL– Input:
• High-level languages (C, system C, system Verilog)• Behavioral hardware description languages (Verilog, VHDL)• Structural HDLs (VHDL, Verilog)• State diagrams / logic networks
– Tools:• Parser• Library of modules
– Constraints:• Resource constraints (no. of modules of a certain type)• Timing constraints (Latency, delay, clock cycle)
– Output:• Operation scheduling (time) and binding (resource)• Control generation and RTL architecture

ECE 667 - Synthesis & Verification - Lecture 2 3
High Level SynthesisHigh Level Synthesis
DD
***
+ +
Signal Flow Database
MAPPING
GRAPHICS
ESTIMATIONS
TRANSFORMATIONSSCHEDULING
func fir (In) : Out =begin
endOut = In@1 * a;
DD
***
+ +
Adder
Mult
Time 1 2 3 4xx x
x xx
Min Bounds:2 adders1 multiplier16 registers
D
***
++reg
regmult
C
TEMPLATE MATCHING
DD
***
+ +
+

ECE 667 - Synthesis & Verification - Lecture 2 4
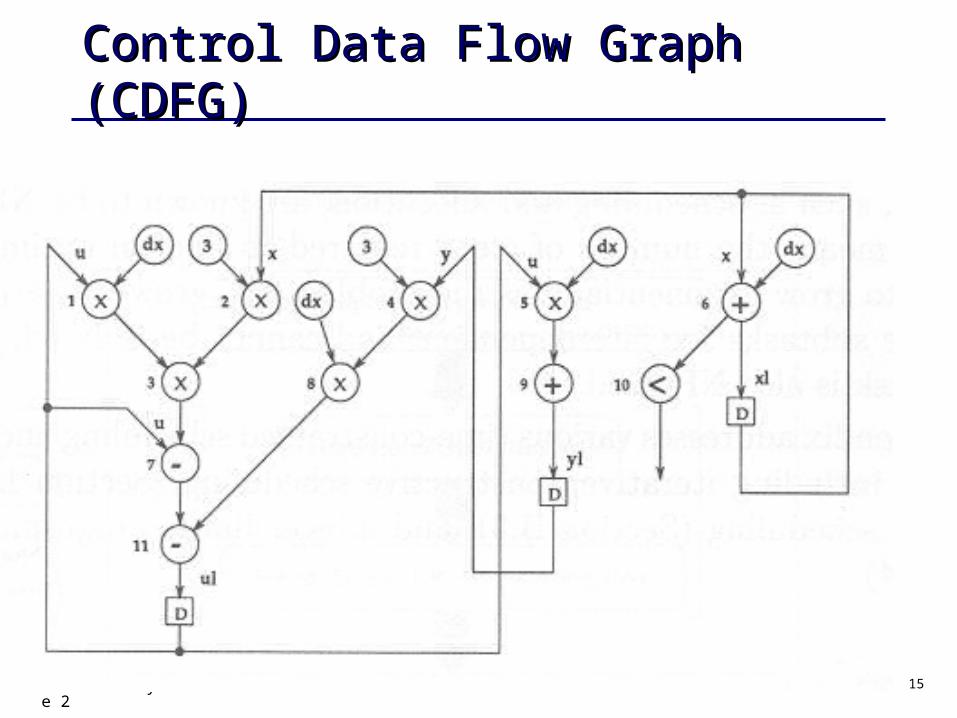
• A second-order digital filter /* A behavioral description of a digital filter
module digital_filter(x1,y1);
input x1;output y1;wire [7:0] r1,r2,r3,r4,t1,t2,c,a11,a21;
assign r1 = x1 + t2; assign r2 = r1 * a11 + t2; assign r4 = r2 + t1; assign r3 = r4 + a21 + t1;
assign y1 = c* (r1 + r2); assign t1 = r3; assign t2 = r3 + r4;
endmodule
Example – Digital Filter designExample – Digital Filter design
Algorithm:
Verilog code:

ECE 667 - Synthesis & Verification - Lecture 2 5
Example – Unscheduled DFGExample – Unscheduled DFG

ECE 667 - Synthesis & Verification - Lecture 2 6
Resource-constraint scheduling ( 1 adder , 1 multiplier)
Register mapping (left-edge algorithm)
Example – Scheduling and Regs mappingExample – Scheduling and Regs mapping

ECE 667 - Synthesis & Verification - Lecture 2 7
c1 c2 c3 c4
c5 c6 c7
n1 n2
n3 n4 n5
x1
const c
y1
Example – Final ArchitectureExample – Final Architecture
FSMcontroller

ECE 667 - Synthesis & Verification - Lecture 2 8
High-Level Synthesis Compilation FlowHigh-Level Synthesis Compilation Flow
Lex
Parse
Compilationfront-end
BehavioralOptimization
Intermediateform
Arch synthLogic synth
Lib BindingHLS backend
x = a + b c + d
+
+
a b c d
+
+
a d b c

ECE 667 - Synthesis & Verification - Lecture 2 9
Behavioral OptimizationBehavioral Optimization
• Techniques used in software compilation– Expression tree height reduction– Constant and variable propagation– Common sub-expression elimination– Dead-code elimination– Operator strength reduction (e.g., *4 << 2)
• Typical Hardware transformations– Conditional expansion
• If (c) then x=A else x=B compute A and B in parallel, x=(C)?A:B
– Loop unrolling• Instead of k iterations of a loop, replicate the
loop body k times
A
Bx
c

ECE 667 - Synthesis & Verification - Lecture 2 10
Optimization in Temporal DomainOptimization in Temporal Domain• Scheduling and binding can be done in different
orders or together• Schedule:
– Mapping of operations to time slots (cycles)– A scheduled sequencing graph is a labeled graph
[©Gupta]
+
NOP
+ <
-
-
NOP
1
2
3
4
+
NOP
+
<
-
-
NOP
1
2
3
4

ECE 667 - Synthesis & Verification - Lecture 2 11
Scheduling in Spatial DomainScheduling in Spatial Domain
• Resource sharing– More than one operation bound to same resource– Operations have to be serialized– Can be represented using hyperedges (define vertex partition)
[©Gupta]
+
NOP
+ <
-
-
NOP
1
2
3
4

ECE 667 - Synthesis & Verification - Lecture 2 12
Architectural OptimizationArchitectural Optimization
• Optimization in view of design space flexibility• A multi-criteria optimization problem:
– Determine schedule and binding .
– Under area , latency L and cycle time objectives
• Find non-dominated points in solution space• Solution space tradeoff curves:
– Non-linear, discontinuous
– Area / latency / cycle time (more?)
• Evaluate (estimate) cost functions• Unconstrained optimization problems for resource dominated
circuits:– Min area: solve for minimal binding
– Min latency: solve for minimum L scheduling
[©Gupta]

ECE 667 - Synthesis & Verification - Lecture 2 13
Typical High-Level Synthesis SystemTypical High-Level Synthesis System

ECE 667 - Synthesis & Verification - Lecture 2 14
Algorithm DescriptionAlgorithm Description
ECE 667 - Synthesis & Verification - Lecture 2 15
Control Data Flow Graph (CDFG)Control Data Flow Graph (CDFG)

ECE 667 - Synthesis & Verification - Lecture 2 16
Precedence GraphPrecedence Graph

ECE 667 - Synthesis & Verification - Lecture 2 17
Sequence Graph: Start and End NodesSequence Graph: Start and End Nodes

ECE 667 - Synthesis & Verification - Lecture 2 18
Hierarchy in Sequence GraphsHierarchy in Sequence Graphs

ECE 667 - Synthesis & Verification - Lecture 2 19
Hierarchy in Sequence Graphs (contd.)Hierarchy in Sequence Graphs (contd.)

ECE 667 - Synthesis & Verification - Lecture 2 20
Hierarchy in Sequence Graphs (contd.)Hierarchy in Sequence Graphs (contd.)

ECE 667 - Synthesis & Verification - Lecture 2 21
ImplementationImplementation
Control/DataFlow Graph
(CDFG)Implementation
RegReg
Multiplier
Adder
RegReg2 1 1 ...2 3 2 ...
4 3 2 ...
0 4 7 ...
4 7 9 ...

ECE 667 - Synthesis & Verification - Lecture 2 22
Original specification
Un-scheduled DFG: one-to-one mapping from HDL spec.
RTL optimized for particular objective
Physical Implementation
HDL
DFG1 DFG2 DFGn
RTL1 RTL2
Circuit, SoC
Synthesis Flow – mapping & optimization stepsSynthesis Flow – mapping & optimization steps
ECE 667 - Synthesis & Verification - Lecture 2 23
x
+
a b c
F
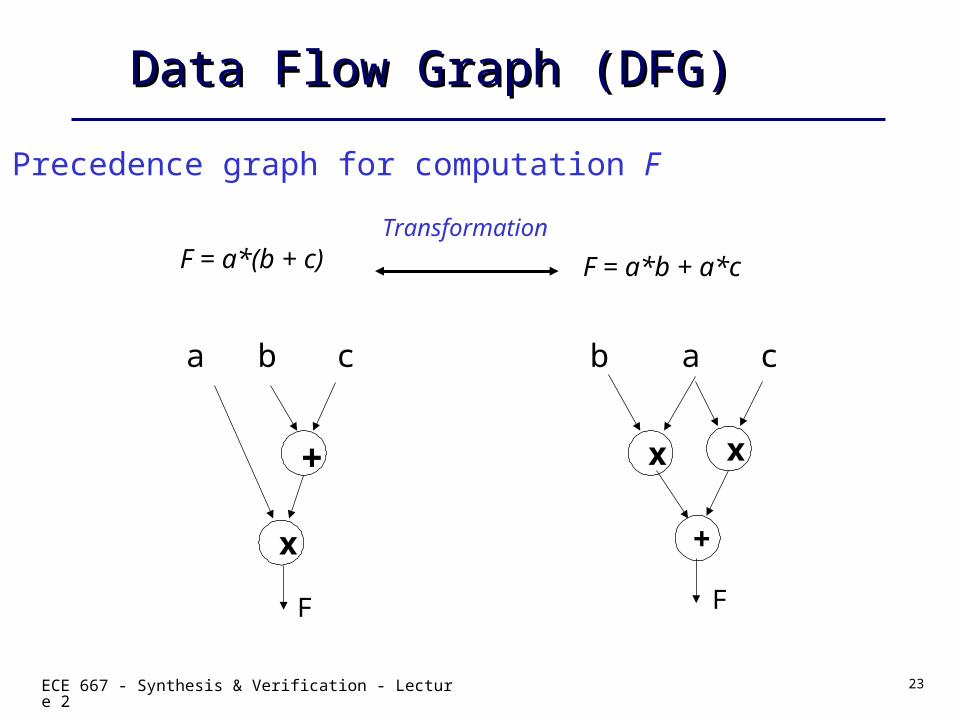
Data Flow Graph (DFG)Data Flow Graph (DFG)
Precedence graph for computation F
F = a*b + a*cF = a*(b + c)Transformation
+
x
ab c
x
F

ECE 667 - Synthesis & Verification - Lecture 2 24
+
x
ab c
F=ab+ac
x
DFG Scheduling
X
+
a b c
F=a(b+c)
X
+
a b c
F
s0
s1
L=2, 1 Add, 1 Mult
+
x
ab c
F
xs0
s1
L=2, 1 Add, 2 Mult L=3, 1 Add, 1 Mult
+
x
ab c
F
x
s0
s1
s2

ECE 667 - Synthesis & Verification - Lecture 2 25
x
+
a b c
F
S0
S1+
x
ab c
F
x+
x
ab c
F
xs0
s1
s2
s0
s1
X
+
FF
b ca
F
CK
CTLlogic
+
X
FFCTLlogic
CK
a b c
F
FF
XX
FF
+
b a c
CTLlogic
CK
F
Scheduling affects RTL

ECE 667 - Synthesis & Verification - Lecture 2 26
(+):
(x):
(2x2)(4x1)
(3x5) (4x4)
(mux):
(2x1)(FF):
(4x1) (2x2)
Resources: Datapath Library
• Operators available from datapath library
- pre-synthesized, pre-characterized
- different layout, etc

ECE 667 - Synthesis & Verification - Lecture 2 27
mux
X
FF1
FF2
+
FF2
x
+
FF1
mux
Evaluate: area, wirelength, congestion, interconnect, …
+
X
FFCTLlogic
CK
a b c
F
FF
Floorplan Estimation