járműinformatika - rs1.sze.hurs1.sze.hu/~korosp/jarmuinformatika_levelezo/01 -...
TRANSCRIPT


Ajánlott irodalom
Gépjárművek buszhálózatai
Dr. Kováts Miklós, Dr. Szalay Zsolt (ISBN 978-963-9945-
10-4)
Multiplexed Networks for Embedded Systems
Dominique Paret (ISBN 978-0-470-03416-3)
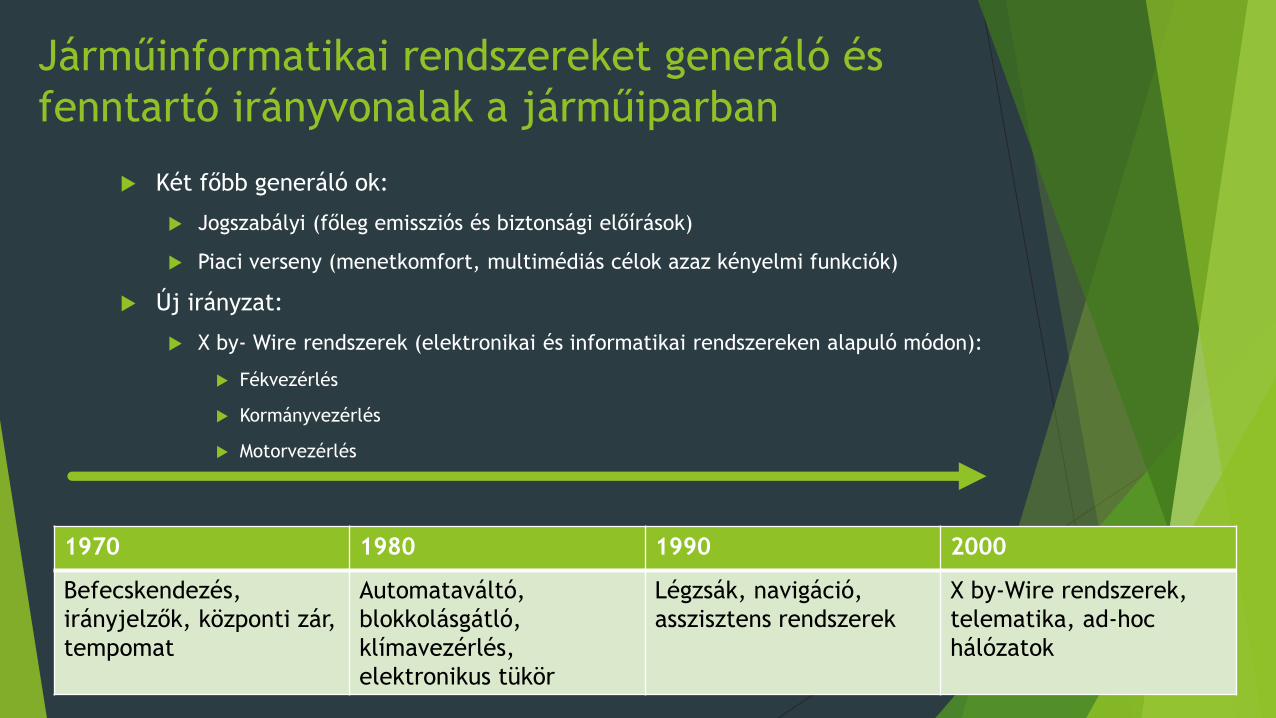
Járműinformatikai rendszereket generáló és
fenntartó irányvonalak a járműiparban
Két főbb generáló ok:
Jogszabályi (főleg emissziós és biztonsági előírások)
Piaci verseny (menetkomfort, multimédiás célok azaz kényelmi funkciók)
Új irányzat:
X by- Wire rendszerek (elektronikai és informatikai rendszereken alapuló módon):
Fékvezérlés
Kormányvezérlés
Motorvezérlés
1970 1980 1990 2000
Befecskendezés,
irányjelzők, központi zár,
tempomat
Automataváltó,
blokkolásgátló,
klímavezérlés,
elektronikus tükör
Légzsák, navigáció,
asszisztens rendszerek
X by-Wire rendszerek,
telematika, ad-hoc
hálózatok

Járműinformatikai rendszerek jellemzői
Jellemzően buszrendszerek (lehet más topológia is)
Fő célja kábelezés egyszerűsítése (ha egy mai autóban minden egység külön-külön
saját jelkábelekkel csatlakozna, akkor a kábelezés tömege meghaladná a jármű
önsúlyát)
Mechatronikai, kompakt és önálló alrendszerek térnyerése
Kormányszervó
ESP
Motorvezérlés
Stb.
Biztonság (kapcsolatok számának csökkentése, önszabályozás)
Ár!

Járműinformatikai kommunikációs
protokollokkal szemben támasztott
követelmények
Képes legyen sok szereplős vezérlőegységek kiszolgálásra
(csomópontok)
Kellő adatátviteli sebesség
Integráció, komplex rendszerek igényei
Adat sérthetetlenség
Biztonságkritikusság?
Ár!

Járműinformatikai kommunikációs
protokollok

Járműves buszrendszerek osztályozása
Alaprendszerek:
CAN (High-Speed, Low-Speed)
SAE J1567 (C2D), SAE J1850 (PWM)
SAE J1850 (PWM)
VAN
Nagysebeségű / Valós idejű rendszerek
ByteFlight
FlexRay
SAE J2106
TTCAN
TTP
Multimedia
D2B
GigaStar
IEEE1394
MOST
SubBus:
BSD
Ford UBP
GM Single-Wire-CAN
I2C
K-Line/L-Line/ISO9141/KWP2000
LIN
RS-232, RS485
SAE J2058
SPI
Vezeték nélküli kapcsolat:
Bluetooth
WLAN (IEE 802.11)

Buszrendszerek átviteli sebessége alapján
való besorolása SAE szabvány szerint
A-osztály B-osztály C-osztály
< 10 kbit/s
Diagnosztika
Komfort funkciók
10…100 kbit/s
Karosszéria- és Komfort-
elektronika
100 kbit/s…1 Mbit/s
Valósidejű adatfeldolgozó és
multimédia rendszerek

Buszrendszerek költsége és adatátviteli
sebessége
D2B
J1850
20K
1M
10M
25M
0,5 5,02,51,0
Adatá
tvit
eli s
ebess
ég
(Bit
/s)
Relatív
költségek (€)
Domestos
Digital
Bus
TTP
CANZweidrahtbus

Buszrendszerek összehasonlító táblázata
Specifikáció 1999 19991983
Átviteli sebesség 20 Kbit/s 1 Mbit/s 22,5 Mbit/s
Adatmennyiség Kicsi Közepes Magas
Medium Egy vezetékes Két vezetékes Optikai
Rel. Ár/Csomópont Kicsi (~1€) Közepes(~2€) Magas (~5€)
Busz-kezelésMaster/Slave Multi-Master Master/Slave
BuszhozzáférásAszinkron Aszinkron Szinkron /
Aszinkron
Résztvevők száma Master
+ 16 Slaves
Javasolt: Max. 32 Max. 64
2009
2x10 Mbit/s
Magas
2x Két vezetékes
Közepes(~3€)
Multi-Master
Nem definiált
Szinkron /
Aszinkron

Buszrendszerek alkalmazási területei
egy járműben
LIN
CAN
(TTCAN)
FlexRay
MOST
Fedélzeti
elektronika
Hajtás és
járműdinamikai
funkciók
Infotainment
Légkondicionálás LopásvédelemAjtó és világítási
modulok
Gateway
Gateway
Tűzfal
Hajtómű-vezérlés Motorvezérlés ABS ESP
Elektromos
fékezés
Elektromos
kormányzásElektromos hajtás
Multimédia Internet Navigáció

Alapfogalmak
Bitek és Byte-ok
Legkisebb információs egység: bit (0 vagy 1)
Jelölése: b
8 bit = 1 byte (28=256 különböző érték, de számábrázolásban 0-255)
Jelölése: B
1MB = 1.024 KB = 1.048.576 B = 8.388.608 bit
CAN hálózatok jellemző adatátviteli sebessége a járműiparban 500kbit/s (62.5 KB/s, 0.061 MB/s)

Alapfogalmak
Az adatátvitel „sebessége” (sávszélesség):
Egységnyi idő alatt továbbított jelek mennyisége
Informatika: MB/s (HDD: 120 MB/s, SSD: 220 MB/s)
Hálózatok: kb/s -> kbps (modem: 56 kbps, ADSL: 1024 kbps,
kábeles internet: 50 Mbps)
Járműinformatika: Baud/s, kBaud/s -> bps, kbps

Alapfogalmak
Real-Time rendszerek:
Nem azonnali beavatkozást jelent, hanem a időbeli korlátok teljesülését.
Várakozási
idő
Válaszolási idő
Szünet
Átvételi idő
Aktiválási
időpont
Abszolút
határvonal
Relatív határvonal
Idő

Alapfogalmak
Szinkron és aszinkron adatátvitel:
Aszinkron:
Nem folyamatos kommunikáció
Start és Stop jelek
Szünetek (mindig hosszabb egy bitidőnél)
Szinkron:
Folyamatos adatátvitel lehetséges
Jel-szinkronizáció (bonyolultabb elektronika)
Üzenetek tagolása

Alapfogalmak
Bitkódolás (információ nem
mindig egyenlő a fizikai jellel)
NRZ (Non Return to Zero)
MAN (Manchester kód)
PWM (Pulse With Modulation)
0 1

Hálózati fogalmak

Alapfogalmak
Hálózati topológiák
Csillag
Busz
Lánc
Gyűrű
Teljes

Csillag topológia
Jellemzően SubBus rendszerek
topológiája
Master-Slave rendszerek
Közvetlen címzés
Előnyök:
A hálózat egyes résztvevőinek kiesése – a
központi egység kivételével - nem jelenti
a hálózat működésképtelenségét.
Csillagközéppont jól elrejthető, védhető.
Hátrányok:
Központi egység kiesésekor a teljes
hálózat működésképtelen.
Csillag

Lánc topológia
Egyoldalú Gateway (jelerősítés
funkció, repeater)
Ismétlés funkció
Előnyök:
Egyszerű telepítés
Hátrányok:
Szakadás vagy egy egység kiesése estén
a hálózat csak a hiba helyéig
működőképes.
Lánc

Gyűrű topológia
Jellemzően nagysebességű, nem
irányítási feladatokat hajt végre
Előnyök:
Egyszerű rendszer
Hátrányok:
Szakadás vagy egy egység kiesése estén
a hálózat működésképtelen. Gyűrű

Busz topológia
Egységek minden adatot „látnak”
Multi-Master funkció szükséges
Előnyei:
Egyszerű egy új egység csatlakoztatása
Csak a jeltovábbító fizikai közeg kiesése jelenti a
hálózat működésképtelenségét
Hátrányai:
Korlátozott méret (fizikai kiterjedés)
Buszhozzáférés szervezése
Busz

Buszkapcsolati módszerek felosztása
Hozzáférés a
buszhálózathoz
Meghatározott
(vezérelt)
Sztochasztikus
(véletlenszerű)
Központi
vezérlés
(LIN)
Decentralizált
vezérlés
(FlexRay)
Ütközésmentes
(CAN)
Nem
ütközésmentes
(Ethernet)

Hálózatok közötti kapcsolatok
Elvben lehetséges egy, minden vezérlőegységet
összekötő hálózatra.
Miért kell úgynevezett Gateway-eket (Bridge-eket)
alkalmazni mégis a hálózatok között?
Mert olcsóbb rendszer lesz!
Könnyű illeszthetőséget biztosítanak
Jól tagolható, rendszerezhető az informatikai rendszer
Biztonsági funkciókat valósítanak meg

Gateway (Bridge)
Két hálózat között biztosít kapcsolatot, szűrő funkciókat is elláthat
Gateway
CAN hálózat 1 CAN hálózat 2
01101101101110001011001
011011010100110101010110011010101

Gateway két különböző hálózat között
(Firewall)
Az adattovábbítás egyirányú
Gateway
CAN hálózat 1 LIN hálózat
01101101101110001011001
01101101010011010101

SuperGateway
Minden hálózatot képes kezelni, egyre gyakoribb központi egység (minden hálózatra fel van fűzve)
Super
Gateway
CAN hálózat 1
CAN hálózat 2
LINFlexRay
VAN hálózat
GSMWLAN
Bluetooth

Az elektronikus vezérlőrendszer
elemeinek áttekintése

Vezérlőrendszerek egységei
Szenzorok és előírt érték-adók
• Gázpedál-állás
• Levegőtömeg mérés
• Fojtószelep-állás
• Lambdaszonda
• Kopásmérők
• Akkumulátor feszültség
• Sebességfokozat
• Jármű sebessége
Vezérlőegység
• Logika
• Vezérlő
• Szabályozó
• Look-up-Table
• Állapotgép
• Ellenőrző modul
• Diagnosztika
Beavatkozó elemek
(aktuátorok)
• Relék
• EGAS-állító
• Gyújtógyertyák
• Szekunder levegő
• Vezérműtengely-vezérlés
• Motor-fordulatszámmérő

Szenzorok
Szenzor
Zavarások
(hőmérséklet,
Tápfeszültség ingadozások)
Fizikai, kémiai,
elektromos
mennyiségek
Leggyakrabban
elektromos
kimeneti jel

Szenzorok integráltsági foka
Elektronika nélkül SzenzorZavarásra
érzékeny
Átviteli út
Vezérlőegység
(Jelfeldolgozó, A/D
átalakító)
1. Integráltsági fokSzenzor
(Jelfeldolgozó)
Zavarásra
szegény
Vezérlőegység (A/D
átalakító)
2. Integráltsági fok
Szenzor
(Jelfeldolgozó,
A/D, BUS
csatlakozás)
ZavarmentesVezérlőegység (BUS
csatlakozási pont)
3. Integráltsági fok
Szenzor
(Jelfeldolgozó,A/D,
BUS csatlakozás,
mikroszámítógép)
ZavarmentesVezérlőegység (BUS
csatlakozási pont)
010011010
01001
010011010
01001

Leggyakrabban előforduló szenzorok
Fordulatszám szenzorok:
Magnetorezisztív jeladók
Indukciós jeladók
Elfordulás- és perdület-szenzorok:
Optikai
MEMS (Microelectromechanical
systems)
Hőmérséklet szenzorok:
NTC, PTC elemek
Szögjel adók
Potenciméter
Hall szenzorok
Indukciós
Gyorsulásszenzorok
MEMS
Képalkotás, térfigyelés
Video
Ultrahang
Lézer
Fényhatás, esőérzékelő
Optikai érzékelők

Vezérlőegység
Szenzoros jelek feldolgozása
(analóg, digitális)
Memória (EEPROM)
Mikroprocesszor
Döntések, logika
Vezérlés
Szabályozás
Számítások
Önellenőrzés
Diagnosztika
Teljesítményelektronika

Beavatkozók (aktuátorok)
Elektromechanikus működtetők
Vezérlőegység által kiadott elektromos jelet mechanikai munkává alakítja
(elfordulás, elmozdulás)
Jellemzően külső terhelés biztosítja a 0 állapotot (rugó, laprugó stb.)
Mágnesszelepek
Proporcionális szelepek
Közvetlen mágneses
Elektrohidraulikus

Számrendszerek és az átváltások
műveletei
Bináris
Egy helyiértéken 0 vagy 1 (fizikai jel reprezentálása)
24 23 22 21 20
16 8 4 2 1
Hexadecimális
Egy helyiértéken 0 … 15 (helyiérték értékkészlete: 0,1,2,3,4,5,6,7,8,9,A,B,C,D,E,F)
164 163 162 161 160
65536 4096 256 16 1
Decimális
Egy helyiértéken 0 … 9
104 103 102 101 100
10000 1000 100 10 1

Tízes számrendszerből kettesbe (osztás 2-vel)
199
99
1
49
1
24
1
12
0
6
0
3
0
1
1
11000111

Kettesből tizenhatos számrendszerbe
11000111
8 4 2 1 8 4 2 1
12
C
7
7 C7

Tízes számrendszerből tizenhatosba (osztás 16-tal)
199
12
7
C C7

Tizenhatos számrendszerből tízesbe
BC7
162x11 + 161x12 + 160x7 =
256x11 + 16x12 + 7 =
3015

Kettes számrendszerben való összeadás
011011011
011001010
101001011
XOR kapu igazságtáblája
0 0 0
1 0 1
0 1 1
1 1 0

Köszönöm a figyelmet!