part iv: unconstrained optimization spring 2015
TRANSCRIPT

Computational Economics and Finance
Part IV:
Unconstrained Optimization
Spring 2015

Outline
Comparison Methods
Optimality Conditions
Newton’s Method
Line Search Methods
Trust Region Methods
2

Unconstrained Optimization
Unconstrained minimization problem
minx∈Rn
f(x)
where f : Rn → R is the objective function
Optimal solution x∗ satisfies f(x∗) ≤ f(x) for all x ∈ Rn
Minimizer x∗, minimum f(x∗)
Equivalence between maximization and minimization problems
max f(x) = −min−f(x)
Very difficult problem in general
3
Local Solution
Without restrictions on the class of problems there are many
local, often non-global, minimizers
Local minimizer is a point x∗ such that
f(x∗) ≤ f(x) for all x ∈ N (x∗)
where N (x∗) is a neighborhood of x∗
Isolated local minimizer is a point x∗ such that
f(x∗) < f(x) for all x ∈ N (x∗) \ {x∗}
Almost all practical methods for general problems only search for
locally optimal solution
Idea: Generate a sequence of iterates {x(k)} that converges to
the solution4

Grid Search
Grid search method:
Specify a grid of points {xg}Gg=1, evaluate f at these points, and
pick the minimum
May indicate potential regions for minimizer and guide applica-
tion of more advanced methods
Should always be done as an initial step
Grid search is an example of a comparison method, only re-
quires comparison of function values
5

Comparison Method for One-dimensional Optimization
Bracketing search method: Golden ratio search
Find local minimum of function f on interval [a, b]
Select two interior points c, d, such that a < c < d < b
Case 1: f(c) ≤ f(d) minimum must lie in [a, d]replace b with d, new interval [a, d]
Case 2: f(c) > f(d) minimum must lie in [c, b]replace a with c, new interval [c, b]
Now repeat the iteration on the new interval
Question: How to choose c and d?
6

Choosing Points
Select c and d such that the intervals [a, c] and [d, b] have the
same length, so c− a = b− d
c = a+ (1− r)(b− a) = ra+ (1− r)b
d = b− (1− r)(b− a) = (1− r)a+ rb
where 12 < r < 1 to ensure c < d
One of the old interior points will be an endpoint of the new
interval; for efficiency, use the other interior point also as an
interior point for the new subinterval; so in each iteration only
one new interior point and only one new function evaluation is
needed
If f(c) ≤ f(d) then these conditions require
d− a
b− a=
c− a
d− a
7

Golden Ratio
d−ab−a = c−a
d−a
⇐⇒ r(b−a)b−a = (1−r)(b−a)
r(b−a)
⇐⇒ r = (1−r)r
⇐⇒ r2 = 1− r
⇐⇒ r2 + r − 1 = 0
⇐⇒ r = −1±√5
2
and thus r is the golden ratio,
r =−1+
√5
2≈ 0.618034
Interior points
c = a+ (1− r)(b− a)
d = a+ r(b− a)
8

Examples
Miranda/Fackler Figure 4.1: f(x) = x · cos(x2)
Palgrave Example 1: f(x) = ln(x) + 2 · ln(1− x)
Mathematica: Subroutine GoldenSearch
Matlab: CompEcon Toolbox routine golden
9

Comparison Method for Multivariate Functions
No simple bracketing of a minimum in more than one dimension
Prominent comparison method used in economics:
Nelder-Mead (simplex) method
Goal of Nelder-Mead method:
Find a simplex containing a (local) minimizer x∗ = (x∗1, x∗2, . . . , x
∗n)
of the function f : Rn → R
Simplex is the convex hull of n+1 affinely independent points,
that is, of n + 1 points in general position (n-dimensional ana-
logue of a triangle in two dimensions)
10

One Iteration of Nelder-Mead Method
Simplex {x1, . . . , xn+1} with vertices x1, x2, . . ., xn+1 is given
Reorder vertices such that f(xi) ≤ f(xi+1), i = 1, . . . , n
“Worst” point with highest objective function value is xn+1
Goal: replace xn+1 with a new vertex
One iteration of Nelder-Mead method can be one of four possible
steps:
reflect, expand, contract, shrink
11
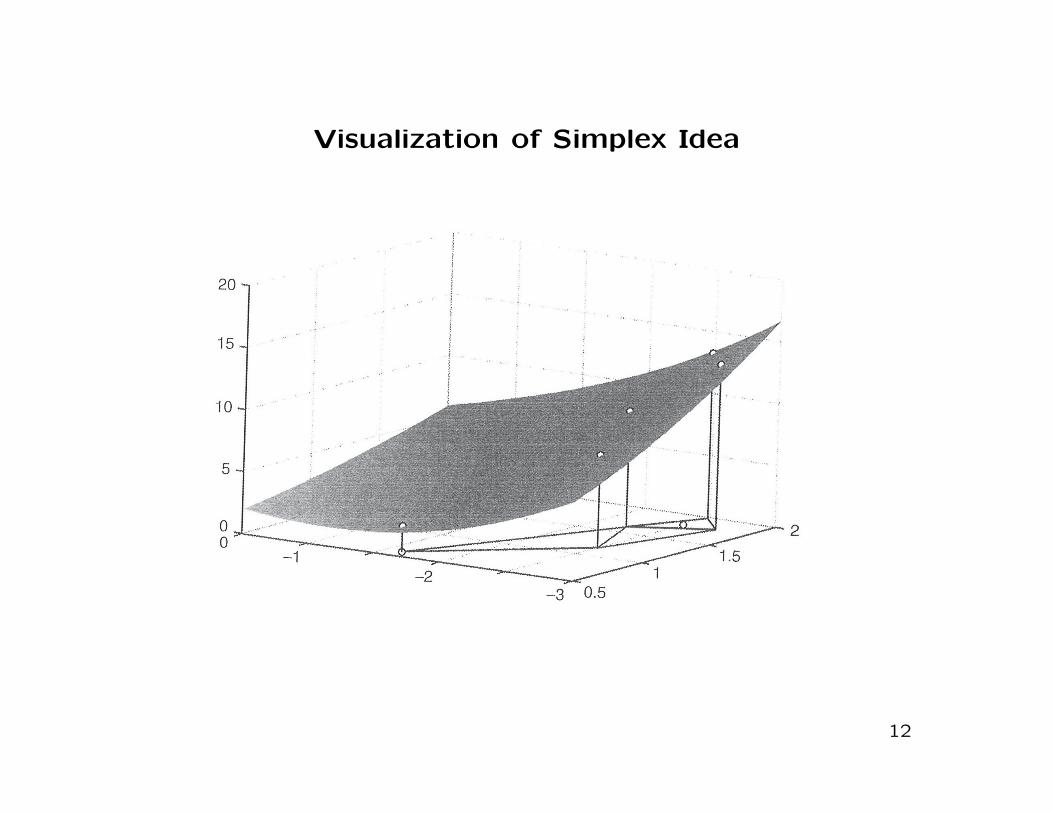
Visualization of Simplex Idea
12

Nelder-Mead Method: Reflect
Midpoint of opposing face is determined by average of all other
vertices
m =1
n
n∑i=1
xi
Now reflect the worst point xn+1 through the opposing face to
a new point, the reflection point xr
xr = m+ (m− xn+1) = 2m− xn+1
If f(x1) ≤ f(xr) < f(xn) then replace xn+1 by xr;
iteration terminates
13

Nelder-Mead Method: Expand
If f(xr) < f(x1) calculate the expansion point xe,
xe = m+2(xr −m) = 3m− 2xn+1 = m+2(m− xn+1)
If f(xe) < f(xr) then replace xn+1 by xe;
if f(xe) ≥ f(xr) then replace xn+1 by xr;
iteration terminates
14

Nelder-Mead Method: Contract
If f(xr) ≥ f(xn) perform a contraction between m and the betterof xn+1 and xr
If f(xn) ≤ f(xr) < f(xn+1) perform an outside contraction,calculate
xoc = m+1
2(xr −m) = m+
1
2(m− xn+1) =
3
2m−
1
2xn+1
If f(xoc) ≤ f(xr) then replace xn+1 by xoc and terminate; other-wise perform a shrink step
If f(xr) ≥ f(xn+1) perform an inside contraction, calculate
xic = m−1
2(m− xn+1) =
1
2m+
1
2xn+1
If f(xic) < f(xn+1) then replace xn+1 by xic and terminate; oth-erwise perform a shrink step
15
Nelder-Mead Method: Shrink
Evaluate f at the n points
vi = x1 +1
2(xi − x1) for i = 2,3, . . . , n+1
New (unordered) vertices are x1, v2, v3,. . . ,vn+1;
iteration terminates
The shrink step could lead to an increase in the function values
at all new vertices
Implementation of algorithm requires tie-breaking rules
16

Some Properties
Number of function evaluations depends on terminating step,
termination with reflect: 1; expand: 2; contract: 2; shrink: n+2
Except for a shrink step, the single new vertex always lies on the
line joining m and xn+1
Only very weak convergence results
17

Comment in a Paper on Convergence Analysis of the Method
Lagarias et al. (SIOPT, 1999):
At present there is no function in any dimension greater
than 1 for which the original Nelder-Mead algorithm has
been proved to converge to a minimizer.
Given all the known inefficiencies and failures of the Nelder-
Mead algorithm [...], one might wonder why it is used at
all, let alone why it is so extraordinarily popular.
18
Reasons for Popularity
Nelder-Mead method typically produces significant improvement
in first few iterations
Other methods are too slow when a function evaluation is enor-
mously time-consuming and derivatives cannot be computed
When it succeeds, the Nelder-Mead method tends to require
substantially fewer function evaluations than other methods; the
method has superior best-case efficiency
The steps are easy to program
19
Nelder-Mead Method is Popular
Matlab: fminsearch uses Nelder-Mead
CompEcon Toolbox: neldmead
Mathematica: NMinimize has option Method → NelderMead
Example: Judd, Exercise 4.1, Rosenbrock’s banana function
f(x, y) = 100(y − x2)2 + (1− x)2
20

Derivative-free Methods and Derivatives
Finally, we want to make a strong statement that often
councils against the use of derivative-free methods: if you
can obtain clean derivatives (even if it requires consider-
able effort) and the functions defining your problem are
smooth and free of noise you should not use derivative-
free methods.
Introduction to derivative-free optimization
Conn/Scheinberg/Vicente (2009)
21

Optimality Conditions for Unconstrained Optimization
First-order necessary conditions
If f is continuously differentiable and x∗ is a local minimizer of
f , then ∇f(x∗) = 0.
Second-order necessary conditions
If f is twice continuously differentiable and x∗ is a local minimizer
of f , then ∇f(x∗) = 0 and Hf(x∗) is positive semi-definite, that
is, s⊤Hf(x∗)s ≥ 0 for all s ∈ Rn.
Second-order sufficient conditions
If f is twice continuously differentiable and at x∗ it holds that
∇f(x∗) = 0 and Hf(x∗) is positive definite, that is, s⊤Hf(x
∗)s > 0
for all s ∈ Rn, s ̸= 0, then x∗ is an isolated local minimizer of f .
22

Sufficient Condition for Global Optimality
If f is convex on Rn, then any local minimizer x∗ is a global
minimizer of f .
If f is convex and differentiable on Rn, then any point x∗ is a
global minimizer of f if and only if it is a stationary point, that
is, ∇f(x∗) = 0.
23

Newton’s Method
Quadratic approximation q of the function f (Taylor’s Theorem)
q(s) = f(x(k)) +∇f(x(k))⊤s+1
2s⊤Hf(x
(k))s
Necessary first-order condition ∇q(s) = 0 yields the Newton step
s(k) = −Hf(x(k))−1∇f(x(k))
Sufficient second-order condition:
Hq(s) = Hf(x(k)) is positive definite
Then s(k) is an isolated (global) minimizer of q
Iteration
x(k+1) = x(k) + s(k) = x(k) −Hf(x(k))−1∇f(x(k))
24

Newton’s Method
Initialization: Choose initial guess x(0) and stopping criteria ϵ, δ.
Iteration step: Compute ∇f(x(k)) and Hf(x(k)). Compute the
step s(k) as the solution to the system of linear equations
H(x(k))s(k) = −∇f(x(k)).
Set x(k+1) = x(k) + s(k).
Stopping rule: If ||x(k+1)−x(k)|| < ϵ(1+||x(k)||) and ||∇f(x(k))|| <δ(1 + |f(x(k))|), stop and report success.
25

Local Convergence Properties of Newton’s Method
Suppose that f is twice differentiable and that the Hessian Hf(x)is Lipschitz continuous in a neighborhood of a solution x∗ atwhich the second-order sufficient conditions are satisfied. Con-sider the Newton iteration
x(k+1) = x(k) + s(k)
Then,
(i) if the starting point x(0) is sufficiently close to x∗, then thesequence of iterates {x(k)} converges to x∗;
(ii) the rate of convergence is quadratic;
(iii) the sequence of gradient norms {||∇f(x(k))||} converges quadrat-ically to zero.
26

Newton’s Method
Mathematica: FindMinimum has option Method → Newton
Examples:
Exercise 4.1, Rosenbrock’s banana function
f(x, y) = 100(y − x2)2 + (1− x)2
Palgrave article, Example 4
f(x, y) = −(√
x1 +2√x2 +3
√(1− x1 − x2)
)Palgrave article, Example 2
f(x) = x(x− 2)2
27

Newton’s Method
Table 4.1: Consumers maximize utility
U(Y, Z) = u(Y, Z) = (Y α + Zα)ηα +M
subject to the budget constraint pY Y +pZZ+M = I. The FOCsare
pY = uY (Y, Z),
pZ = uZ(Y, Z).
The monopolist maximizes profits
Π(Y, Z) = (uY (Y, Z)− cY )Y + (uZ(Y, Z)− cZ)Z.
To avoid fractional powers of negative numbers define y = lnYand z = lnZ and solve the equivalent problem
maxy,z
π(y, z) = Π(ey, ez).
Take α = 0.98, η = 0.85, cY = 0.62, and cZ = 0.6.
28

Line Search Methods
Iteration k +1 of a line search method starting from x(k),
x(k+1) = x(k) + αks(k)
Search direction s(k), step length αk
Search direction s(k) should be a descent direction,
∇f(x(k))⊤s(k) < 0
Always possible to find unless ∇f(x(k)) = 0
From Taylor’s Theorem for sufficiently small ε > 0,
f(x(k) + εs(k)) = f(x(k)) + ε∇f(x(k))⊤s(k) + o(ε2) < f(x(k))
Function f decreases in the downhill direction s(k)
Suitable step length αk?
29

Line Search Methods
Computation of αk is the line search
Clearly we want to require
f(x(k) + αks(k)) < f(x(k))
Despite this requirement method may converge to a non-stationary
point ∇f(x(k)) ̸= 0 where descent directions still exist
Problem: decrease in f(x(k)) per iteration tends to zero
Line search steps are either too long or too short relative to
amount of decrease possible with a well-chosen step (pictures!)
30

Choosing a Step Length
Exact line search: find the optimal value for αk by solving the
one-dimensional optimization problem
minα
f(x(k) + αs(k))
Too expensive to find this global optimum for many iterations,
also unnecessary for convergence
Practical approaches perform inexact line search
Pick a step length that leads to a sufficient decrease in the
objective function value
31

Sufficient Decrease
Step length αk must satisfy Armijo condition
f(x(k) + αks(k)) ≤ f(x(k)) + αkβ∇f(x(k))⊤s(k)
for some β ∈ (0,1)
Right-hand-side f(x(k))+αβ∇f(x(k))⊤s(k) is linear function in α
(picture!)
Since ∇f(x(k))⊤s(k) < 0, the longer the step, the larger the
required decrease in f(x); thus, long steps with tiny decrease are
not permitted
32

Backtracking Armijo Line Search
Choose β ∈ (0,1), τ ∈ (0,1) and α(0) > 0 (e.g. α(0) = 1)
Set l = 0
Until f(x(k) + α(l)s(k)) ≤ f(x(k)) + α(l)β∇f(x(k))⊤s(k)
set α(l+1) = τα(l), increase l by 1
Set αk = α(l)
Iteration will stop after finitely many steps with positive αk
bounded away from zero
33

Backtracking Armijo Line Search
Theorem. Suppose that f ∈ C1, that ∇f is Lipschitz contin-uous with Lipschitz constant γ, that β ∈ (0,1) and that s(k) isa descent direction at x(k). Then the step length generated bythe backtracking Armijo line search satisfies
αk ≥ min
α(0),2τ(β − 1)∇f(x(k))⊤s(k)
γ||s(k)||2
,
where || · || is the Euclidean vector norm. 2
Lower bound on step length, so tiny steps are ruled out
Lower bound will only be small if ∇f(x(k))⊤s(k)
||s(k)||2is small
Problems arise if ∇f(x(k))⊤ and s(k) tend to becoming orthogonal
Choose appropriate descent direction
34

Method of Steepest Descent
Most intuitive choice for descent direction
s(k) = −∇f(x(k))
Greatest possible decrease in the linear approximation
f(x(k)) +∇f(x(k))⊤s(k)
(for a step s(k) of fixed norm)
Called the steepest descent direction
Line search with the steepest descent direction has very nice
theoretical properties
35

Global Convergence of the Steepest Descent Method
Theorem. Suppose that f is continuously differentiable and
that ∇f is Lipschitz continuous on Rn. Then for the sequence
{x(k)} of iterates generated by a line search method using the
steepest descent direction and the backtracking Armijo line search
one of the following three conditions must hold.
(C1) ∇f(x(k)) = 0 for some k ≥ 0.
(C2) limk→∞∇f(x(k)) = 0.
(C3) limk→∞ f(x(k)) = −∞.
2
Steepest descent method has the global convergence property.
36
Poor Performance in Practice
Rate of convergence is linear
In practice convergence is usually very slow
Numerical convergence sometimes does not occur at all as the
iteration stagnates
Method is considered useless in practice
Palgrave article, Example 3
37
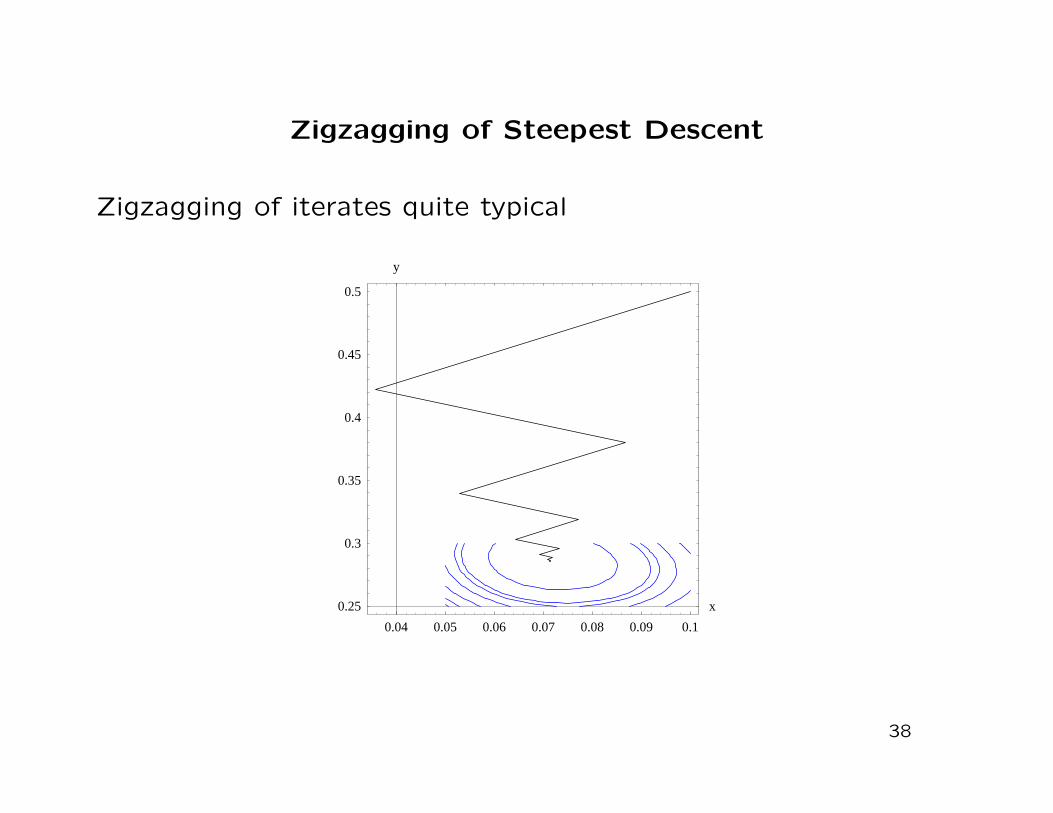
Zigzagging of Steepest Descent
Zigzagging of iterates quite typical
0.04 0.05 0.06 0.07 0.08 0.09 0.1
0.25
0.3
0.35
0.4
0.45
0.5
x
y
38

Line Search with Newton Direction
Newton direction: s(k) = −Hf(x(k))−1∇f(x(k))
Theorem. Suppose that f is twice continuously differentiableand that ∇f is Lipschitz continuous on Rn. If for the sequence{x(k)} of iterates generated by a line search method using theNewton direction and the backtracking Armijo line search theHessian matrices Hf(x
(k)) are positive definite with eigenvaluesthat are uniformly bounded away from zero, then one of theconditions (C1), (C2), (C3) must hold:
(C1) ∇f(x(k)) = 0 for some k ≥ 0.
(C2) limk→∞∇f(x(k)) = 0.
(C3) limk→∞ f(x(k)) = −∞.
2
Problem again: strong assumptions on Hessian matrix Hf(x)
39

Line Search Newton with Hessian Modification
Away from local minimizer, the Hessian matrix Hf(x) may notbe positive definite, and so Newton direction s(k) defined byHf(x
(k))s(k) = ∇f(x(k)) may not be a descent direction
Approach to overcome this difficulty: modify Hessian matrix
Add a matrix M(x(k)) to the Hessian so that M(x(k)) +H(x(k))is “sufficiently” positive definite
Then the direction s(k) is determined by the solution to(M(x(k)) +H(x(k))
)s(k) = ∇f(x(k))
Whenever H(x(k)) is sufficiently positive definite by itself, thenM(x(k)) = 0
Convergence results for properly chosen modifications are similarto those for the case of positive definite Hessian matrix
40

Computation of Second Derivatives
Most tedious step in Newton’s method: computation of Hessianmatrix H(x(k))
Recent development of automatic differentiation techniquesmakes it possible to apply Newton’s method without requiringthe user to supply second derivatives
If automatic differentiation is impossible or too costly, then otherapproaches are needed
Estimating second derivatives by finite differences of first deriva-tives
(Hf(x))·j =∇f(x+ hej)−∇f(x)
h
where ej is the ith unit vector
Difficulty: choosing appropriate value for scalar h > 0
41
Quasi-Newton Methods
Quasi-Newton methods use suitable approximations Bk of the
Hessian Hf(xk)
Require only gradient of the objective function (like steepest
descent)
Measure changes in the gradient to obtain information on the
curvature of f and to update an approximation Bk of Hf(xk)
42

Positive Definite Approximation of Hessian
Quadratic approximation q of the function f (Taylor’s Theorem)
q(s) = f(x(k)) +∇f(x(k))⊤s+1
2s⊤Hf(x
(k))s
Replace Hessian Hf(x(k)) by symmetric positive definite Bk
qk(s) = f(x(k)) +∇f(x(k))⊤s+1
2s⊤Bks
Note that
qk(0) = f(x(k)) and ∇qk(0) = ∇f(x(k))
qk is convex and quadratic and so
s(k) = −(Bk)−1∇f(x(k))
is the global minimizer
New iterate determined with backtracking Armijo line search
x(k+1) = x(k) + αks(k)
43

Requirements on the Approximate Hessian
Iteration is Newton line search with approximate Hessian Bk in
place of true Hessian
New quadratic model
qk+1(s) = f(x(k+1)) +∇f(x(k+1))⊤s+1
2s⊤Bk+1s
Requirements on Bk+1?
Gradient of qk+1 should match gradient of f at the last two
iterates
∇qk+1(0) = ∇f(x(k+1)) and ∇qk+1(−αks(k)) = ∇f(x(k))
First equations holds automatically
44

Secant Equation
Second condition
∇qk+1(−αks(k)) = ∇f(x(k+1))− αkBk+1s
(k) = ∇f(x(k))
is equivalent to
Bk+1αks(k) = ∇f(x(k+1))−∇f(x(k))
With zk = x(k+1)−x(k) and yk = ∇f(x(k+1))−∇f(x(k)) we obtainthe secant equation
Bk+1zk = yk
The symmetric positive definite matrix Bk+1 must map the changezk in the iterates into the change yk in the gradients at the iter-ates
Implications for search direction and change in gradients
z⊤k yk = z⊤k Bk+1zk > 0
Satisfied by iterates chosen by backtracking Armijo line search
45

Solutions to Secant Equation
Under the condition z⊤k yk > 0 there always exist solutions to the
secant equations
In fact, infinite number of solutions
Different additional requirements lead to different solutions Bk+1,
as a result there are numerous quasi-Newton methods
Most effective of all quasi-Newton updating formulas
BFGS updating formula (Broyden, Fletcher, Goldfarb, Shanno)
Bk+1 = Bk −Bkzk(Bkzk)
⊤
z⊤k Bkzk+
yky⊤k
y⊤k zk
If Bk is symmetric positive definite, then so is Bk+1
46

BFGS Method
Initial matrix B0: identity matrix, multiple thereof, or Hessian of
f at x(0)
BFGS method has superlinear convergence on many practical
problems
Global convergence property (under some technical conditions)
Even if sequence of iterates {x(k)} converges, the sequence of
matrices {Bk} may not converge to the true Hessian at the so-
lution
47

Trust-region Methods
Line search methods:
Pick a descent direction s(k) based on an approximation for f
Choose suitable step length αk to decrease f(x(k) + αks(k))
Trust-region methods:
Define a region around current iterate x(k) within which approx-
imation is trusted
Choose the step to be an approximate minimizer of the approxi-
mation for f ; that is, choose direction and length simultaneously
Reduce the size of the trust region if the step is not acceptable
48

Trust-region Subproblem
Once again we use a quadratic model of f ,
qk(s) = f(x(k)) +∇f(x(k))⊤s+1
2s⊤Bks
Trust-region subproblem
mins∈Rn
qk(s) subject to ||s|| ≤ ∆k
with trust-region radius ∆k > 0
Use Euclidean norm, so {s : ||s|| ≤ ∆k} is the ball of radius ∆k
Constraint can be written as s⊤s ≤ ∆2k
Unlike for line search methods, Bk = Hf(x(k)) is always permitted
49

A Key Ingredient of the Trust-region Algorithm
Evaluation of a possible step s(k) from x(k) to x(k+1) = x(k)+s(k)
Predicted reduction by quadratic model: qk(0)− qk(s(k))
Actual reduction in function values: f(x(k))− f(x(k) + s(k))
Fraction of predicted reduction that is realized by the actualreduction
ρk =f(x(k))− f(x(k) + s(k))
qk(0)− qk(s(k))
If ratio ρk is close to (or larger than) 1, then there appears tobe good agreement between f and qk, so trust-region radius willbe increased
If ρk is close to zero or even negative, then we set x(k+1) = x(k)
and reduce the trust region radius
50

Basic Trust-region Algorithm
Parameters 0 < ηs < ηv < 1, γi ≥ 1, 0 < γd < 1
Given x(k), ∆k > 0, iteration k +1:
Approximately solve the trust-region subproblem to find s(k) forwhich qk(s
(k)) < qk(0) = f(x(k)) and ||s(k)|| < ∆k and define
ρk =f(x(k))− f(x(k) + s(k))
f(x(k))− qk(s(k))
If ρk ≥ ηv [very successful],
set x(k+1) = x(k) + s(k) and ∆k+1 = γi∆k
Otherwise, if ρk ≥ ηs [successful],
set x(k+1) = x(k) + s(k) and ∆k+1 = ∆k
Otherwise [unsuccessful],
set x(k+1) = x(k) and ∆k+1 = γd∆k
51
Practical Considerations
Popular values: ηv ∈ {0.9,0.99}, ηs ∈ {0.1,0.01}, γi = 2, γd = 0.5
Parameter values may be allowed to vary from iteration to iter-
ation
Trust-region radius is not increased for very successful iterations
if ||s(k)|| is much smaller ∆k
Open problems:
Solving the trust-region subproblem
Finding conditions for convergence
52

Sufficient reduction
Line search methods do not require step length to be chosen
optimally to be globally convergent
Similarly, unnecessary and computationally inefficient to solve
trust-region subproblem exactly
Sufficient reduction in approximation qk(s) suffices
Reduction in the approximation should be at least as large as
from an iteration of steepest descent
53

Cauchy Point
The solution to
minα∈R
qk(−α∇f(x(k))) subject to ∥ − α∇f(x(k))∥ ≤ ∆k
yields the Cauchy point
sCk = −τk∆k∇f(x(k))
∥∇f(x(k))∥where constant τk ∈ (0,1] depends on the curvature of qk andtrust-region radius ∆k
Closed-form solution for τk exists, Cauchy point is inexpensiveto calculate
The approximate solution s(k) of the trust region subproblemmust now satisfy
qk(s(k)) ≤ qk(s
Ck ) and ||s(k)|| ≤ ∆k
54

Improvement by the Cauchy Point
The reduction in the quadratic approximation qk can be related
to ∥∇f(x(k))∥, which is a measure from distance to optimality.
Theorem. Let qk be the second-order approximation of the
objective function f at x(k) and let sCk be its Cauchy point in the
trust region defined by ∥s∥ ≤ ∆k. Then
qk(0)− qk(sCk ) = f(x(k))− qk(s
Ck )
≥1
2∥∇f(x(k))∥min
∥∇f(x(k))∥1+ ∥B(x(k))∥
,∆k
.
2
The theorem establishes a lower bound on the improvement in
qk if trust region radius ∆k is bounded away from zero.
55

Global Convergence
Theorem. Consider the sequence {x(k)} of iterates generated
by a trust region method whose steps do at least as well as the
Cauchy point. Suppose that f is twice continuously differentiable
and both the Hessian of f and of the quadratic approximation qkare bounded for all k. Then one of the conditions (C1), (C2),
(C3) must hold:
(C1) ∇f(x(k)) = 0 for some k ≥ 0.
(C2) limk→∞∇f(x(k)) = 0.
(C3) limk→∞ f(x(k)) = −∞.
2
56

Improvements on the Cauchy Point
Assume matrix B in second-order approximation qk is positive
definite
Dogleg method makes two steps:
First step in the steepest descent direction
Second step in the modified Newton direction
Two-dimensional subspace minimization:
Single step that must lie in the span of the two directions used
by the dogleg method
Additional solution approaches for the trust-region subproblem
exist
57
Computer Implementation
Matlab: fminunc is a solver for nonlinear unconstrained opti-
mzation
Uses a trust-region method with subspace minimization as de-
fault
Has an option for BFGS Quasi-Newton method with a line search
procedure
58