universidade federal do paranÁ - eletrica.ufpr.br · figura 7 - diagrama do circuito l298 .....20...
TRANSCRIPT

UNIVERSIDADE FEDERAL DO PARANÁ
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
CURSO DE ENGENHARIA ELÉTRICA
BRUNO AUGUSTO BRANCO MAZETTI
CEZAR AUGUSTO GONÇALVES DE OLIVEIRA
CONSTRUÇÃO E IMPLEMENTAÇÃO DE UM PROTÓTIPO DE PÊNDULO
INVERTIDO
CURITIBA
2011

BRUNO AUGUSTO BRANCO MAZETTI
CEZAR AUGUSTO GONÇALVES DE OLIVEIRA
CONSTRUÇÃO E IMPLEMENTAÇÃO DE UM PROTÓTIPO DE PÊNDULO
INVERTIDO
Trabalho de Conclusão de Curso de Engenharia Elétrica, Departamento de Engenharia Elétrica, Setor de Tecnologia, Universidade Federal do Paraná. Orientador: Prof. Eduardo Parente Ribeiro
CURITIBA
2011
ii
BRUNO AUGUSTO BRANCO MAZETTI
CEZAR AUGUSTO GONÇALVES DE OLIVEIRA
CONSTRUÇÃO E IMPLEMENTAÇÃO DE UM PROTÓTIPO DE PÊNDULO
INVERTIDO
Trabalho apresentado ao curso de engenharia elétrica, da Universidade Federal do
Paraná, como requisito à obtenção do título de graduação.
COMISSÃO EXAMINADORA
_____________________________________________________
Prof. Dr. Eduardo Parente Ribeiro – UFPR
_____________________________________________________
Prof. Dr. Gideon Villar Leandro – UFPR
_____________________________________________________
Prof. Dr. Gustavo Oliveira – UFPR
Curitiba, Dezembro de 2011.

iii
AGRADECIMENTOS
Agradecemos a nossos pais, José e Gecimi (Cezar) e Renata e Edmilson (Bruno), pelo amor, exemplo e apoio que recebemos de vocês durante nossas vidas. Esta conquista também é fruto de seus esforços.
Agradecemos ao Professor Dr. Eduardo Parente Ribeiro por ter aceitado orientar esse projeto, seus conselhos foram essenciais.
Agradecemos também aos colegas do curso pela força, momentos de distração e amizade que tivemos durante o curso.
Finalmente, agradecemos a todos os professores com os quais tivemos contato durante o curso, pois é graças ao conhecimento passado por eles que esse projeto foi realizado com sucesso.
iv
LISTA DE FIGURAS
Figura 1 - Diagrama de um pêndulo invertido genérico ............................................. 11
Figura 2 - Sistema de controle realimentado ............................................................. 14
Figura 3 - Controlador PID simples ........................................................................... 15
Figura 4 - Renderização da montagem mecânica ..................................................... 16
Figura 5 - Curva de torque do motor ......................................................................... 18
Figura 6 - Esquema de ligação dos circuitos do motor .............................................. 18
Figura 7 - Diagrama do circuito L298 ........................................................................ 20
Figura 8 - Esquema de ligação de dois L298 em paralelo ........................................ 20
Figura 9 - Potenciômetro Vishay 534 ........................................................................ 21
Figura 10 - Circuito de tratamento do sinal do potenciômetro ................................... 22
Figura 11 - Encoder Autonics E40S .......................................................................... 23
Figura 12 - Sinal gerado pelo encoder incremental ................................................... 23
Figura 13 - Esquema elétrico do conversor frequência-tensão ................................. 25
Figura 14 - Esquema elétrico do circuito de intertravamento .................................... 26
Figura 15 - Diagrama da alimentação ....................................................................... 26
Figura 16 - Diagrama em blocos da VI que mede a posição do carrinho .................. 28
Figura 17 - Diagrama em blocos do controle de velocidade ..................................... 29
Figura 18 - Diagrama em blocos do controle de oscilação ........................................ 30
Figura 19 - Diagrama em blocos do controle de posição .......................................... 31
Figura 20 - Tensão capturada pela placa de aquisição de dados ............................. 32
Figura 21 - Cálculo da posição da haste ................................................................... 33
Figura 22 - Desempenho do conversor tensão-frequência ....................................... 34
Figura 23 - Desempenho do circuito de potência - Half e Full Step ......................... 35
Figura 24 - Posição do carrinho - Onda senoidal ...................................................... 36
Figura 25 - Posição do carrinho - Onda quadrada .................................................... 36
Figura 26 - Dados de controle durante o funcionamento do pêndulo. ....................... 37
Figura 27 - Montagem do pendulo ............................................................................ 41
Figura 28 - Diagrama em blocos dos circuitos .......................................................... 42
Figura 29 - Placa de Circuito impresso – Controle e Parte de potência do Motor ..... 43
Figura 30 - Placa de circuito impresso – Cond. do sinal do potenciômetro ............... 43
Figura 31 - Placa de circuito impresso - Intertravamento .......................................... 44
Figura 32 - Placa de Circuito impresso – Cond. do sensor de posição. .................... 44

v
Figura 33 - Foto sensor ............................................................................................. 44
Figura 34 - VI MOTOR_V .......................................................................................... 45
Figura 35 - VI SENTIDO ............................................................................................ 45
Figura 36 - VI HALF_FULL ........................................................................................ 46
Figura 37 - VI ENABLE ............................................................................................. 46
Figura 38 - VI ZERAR_MEIO .................................................................................... 46
Figura 39 - VI MOT_TRAV ........................................................................................ 47
Figura 40 - VI medida_carrinho ................................................................................. 47
Figura 41 - Front Panel ............................................................................................. 48
Figura 42 - Diagrama do controle de velocidade ....................................................... 49
Figura 43 - Diagrama do controle de oscilação ......................................................... 50
Figura 44 - Diagrama do controle de posição............................................................ 51
vi
RESUMO
O presente trabalho apresenta o processo de concepção, construção e implementação de um problema clássico de controle, o pêndulo invertido. O projeto consiste numa haste fixada pela ponta a um carrinho, montado sobre um trilho linear e movimentado por correia comandada por motor de passo, de forma que o objetivo do sistema é manter a haste em equilíbrio vertical através da movimentação do carrinho. O protótipo foi capaz de equilibrar a haste por um intervalo de tempo determinado. O documento visa servir como base para consulta a projetos futuros, bem como sugestões de melhorias na resolução de problemas enfrentados pela equipe. Palavras-chave: pêndulo invertido, sistema de controle, controle PID.

vii
ABSTRACT This paper presents the design process, construction and implementation of a classic problem of control, the inverted pendulum. The project consists of a pendulum fixed by the tip on a cart, which goes mounted on a linear track and is moved by belt driven by a stepper motor, this way, the goal of the system is keep the pendulum in vertical balance by moving the cart. This prototype was able to balance the pendulum for a limited amount of time. The document aims to serve as a consulting basis for future projects, as well as suggestions for improvements in the resolution of problems faced by the team. Key Words: inverted pendulum, control system, PID control.

viii
SUMÁRIO
LISTA DE FIGURAS .................................................................................................. iv
RESUMO.................................................................................................................... vi
1 INTRODUÇÃO ....................................................................................................... 10
1.1 JUSTIFICATIVA .................................................................................................. 10
1.2 OBJETIVOS ........................................................................................................ 10
2 FUNDAMENTOS TEÓRICOS ................................................................................ 11
2.1 O PÊNDULO INVERTIDO ................................................................................... 11
2.2 CONTROLE PID ................................................................................................. 14
3 DESENVOLVIMENTO ........................................................................................... 16
3.1 PARTE MECÂNICA ............................................................................................ 16
3.2 MOTOR ............................................................................................................... 17
3.3 AQUISIÇÃO DO ÂNGULO DO PÊNDULO ......................................................... 21
3.3.1 POTENCIÔMETRO .......................................................................................... 21
3.3.2 ENCODER ....................................................................................................... 22
3.4 CIRCUITOS DE INTERFACE ............................................................................. 24
3.4.1 CONVERSOR FREQUÊNCIA-TENSÃO .......................................................... 24
3.4.2 INTERTRAVAMENTO ...................................................................................... 25
3.4.3 ALIMENTAÇAO ................................................................................................ 26
3.5 LABVIEW – PROGRAMAÇÃO ............................................................................ 27
3.5.1 CONTROLE DE VELOCIDADE ....................................................................... 28
3.5.2 CONTROLE DE OSCILAÇÃO .......................................................................... 29
3.5.3 CONTROLE DE POSIÇÃO .............................................................................. 30
4 RESULTADOS ....................................................................................................... 32
4.1 SENSOR DA HASTE .......................................................................................... 32
4.2 CONVERSOR FREQUÊNCIA-TENSÃO ............................................................. 33
4.3 POSICIONAMENTO DO CARRINHO ................................................................. 35
4.4 EQUILÍBRIO DA HASTE ..................................................................................... 36
5 CONCLUSÕES ...................................................................................................... 38
5.1 APRIMORAMENTOS .......................................................................................... 38
REFERÊNCIAS ......................................................................................................... 39
REFERÊNCIAS DE VÍDEOS NO YOUTUBE ............................................................ 40
ANEXO I – Montagem do Pêndulo ......................................................................... 41

ix
ANEXO II – Diagrama em blocos dos circuitos .................................................... 42
ANEXO III – Placas de circuito impresso .............................................................. 43
ANEXO IV – VIs utilizadas....................................................................................... 45
ANEXO V – Front panel ........................................................................................... 48
ANEXO VI – Controle de velocidade ...................................................................... 49
ANEXO VII – Controle de oscilação ....................................................................... 50
ANEXO VIII – Controle de posição ......................................................................... 51
10
1 INTRODUÇÃO
Os livros e artigos técnicos que tratam da teoria de controle em malha
fechada frequentemente utilizam o pêndulo invertido como base de estudo,
conforme visto em [6], pois o mesmo possui características que tornam seu
controle uma tarefa desafiadora.
Este projeto contempla a construção de um protótipo de um pêndulo
invertido controlado por malha fechada através do software da National
Instruments, o LabVIEW, para que seja possível testar diferentes estratégias de
controles. As tarefas da etapa de desenvolvimento consistiram em projetar as
peças mecânicas, os circuitos eletrônicos e a programação do controlador.
1.1 JUSTIFICATIVA
Tendo em vista a grande quantidade de sistemas controlados
digitalmente implementados em complexas aplicações de engenharia, cujo
objetivo é resolver diferentes problemas enfrentados em nosso cotidiano, bem
como promover o progresso da sociedade, torna-se necessário a um
engenheiro dominar as ferramentas que permitam implementar um sistema
desta natureza.
1.2 OBJETIVOS
Construir um protótipo de pêndulo invertido, utilizando um controlador
realimentado para equilibrar uma haste com movimento de rotação livre,
através de um carrinho que se movimenta em uma guia linear, para possibilitar
o estudo de diferentes sistemas de controle de forma prática, complementando
a teoria estudada em sala de aula, a fim de solidificar os conhecimentos e a
formação técnica do engenheiro.

11
2 FUNDAMENTOS TEÓRICOS
2.1 O PÊNDULO INVERTIDO
O pêndulo invertido é um sistema basicamente composto por uma
haste com giro livre fixada a uma base (carrinho), como pode ser visto na
“figura 1”. Deve-se implementar um controle para movimentar a base de tal
maneira que a haste fique sempre equilibrada na posição vertical. Este sistema
é intrinsecamente instável, pois o menor distúrbio é capaz de desequilibrar a
haste. É possível encontrar diversos exemplos de trabalhos como este na
internet, tanto de forma escrita [7] e [8], como em vídeos no youtube (conforme
listado nas referências), de forma que, após várias pesquisas, foram
aproveitadas ideias básicas das soluções bem sucedidas aplicadas nestes
exemplos, tanto para o controle em si, como para a aquisição de dados e
montagem física.
Figura 1 - Diagrama de um pêndulo invertido genérico
A modelagem deste sistema será baseada em 3 considerações:
O sistema não possui atrito.
O sistema é linear se o valor do angulo し for próximo de 0.
O centro de massa da haste está localizado no meio da mesma.

12
Utilizando a “figura 1” como base, onde 肯 representa o ângulo de
inclinação da haste e a mesma possui tamanho L, a somatória de forças no
ponto de rotação é visto na equação 1 [3].
荊┻ 肯┉┉ 噺 盤洪繋槻 椎 津鳥通鎮墜匪┻ 挑態 ┻ 肯 伐 盤洪繋掴 椎 津鳥通鎮墜匪┻ 挑態 ┻ 肯 (1)
Na equação 1, I representa o momento de inércia do pêndulo, 肯┉┉ é a
segunda derivada de 肯, 洪繋槻 椎 津鳥通鎮墜 e 洪繋槻 椎 津鳥通鎮墜 representam a somatória de
forças no eixo y e x, respectivamente. Descrevendo as forças, temos:
洪繋掴 椎 津鳥通鎮墜 噺 警椎 津鳥通鎮墜┻ 圏┉┉椎 (2)
洪繋槻 椎 津鳥通鎮墜 噺 警椎 津鳥通鎮墜┻ 検┉┉椎 髪警椎 津鳥通鎮墜┻ 訣 (3)
Substituindo qp e yp, coordenadas do centro de gravidade, nas
equações 2 e 3, respectivamente temos:
洪繋掴 椎 津鳥通鎮墜 噺 警椎 津鳥通鎮墜┻ 擢鉄擢 痛鉄 岾圏 髪 挑態 ┻ 肯峇 (4)
洪繋槻 椎 津鳥通鎮墜 噺 警椎 津鳥通鎮墜┻ 擢鉄擢 痛鉄 岾挑態 ┻ 肯峇 髪 警椎 津鳥通鎮墜┻ 訣 (5)
Na equação 4, 圏 representa a posição do carrinho. Considerando
Sen(し)=し e cos(し)=1, sendo este um sistema linear, temos:
洪繋掴 椎 津鳥通鎮墜 噺 警椎 津鳥通鎮墜┻ 圏┉┉ 髪 警椎 津鳥通鎮墜┻ 挑態 ┻ 肯┉┉ (6)
洪繋槻 椎 津鳥通鎮墜 噺 警椎 津鳥通鎮墜 ┻ 訣 (7)
E, da equação 1:
荊┻ 肯┉┉ 噺 盤洪繋槻 椎 津鳥通鎮墜匪┻ 挑態 ┻ 肯 伐 盤洪繋掴 椎 津鳥通鎮墜匪┻ 挑態 (8)

13
Inserindo as equações 6 e 7 na equação 8:
荊┻ 肯┉┉ 噺 警椎 津鳥通鎮墜 ┻ 訣┻ 挑態 ┻ 肯 伐 警椎 津鳥通鎮墜┻ 挑態 ┻ 圏┉┉ 伐 警椎 津鳥通鎮墜┻ 挑鉄替 ┻ 肯┉┉ (9)
A equação 9 descreve a dinâmica do pêndulo. A somatória de forças
no carrinho está demonstrada nas equações 10 e 11.
繋掴 頂銚追追沈津朕墜 噺 警頂墜追追勅沈銚┻ 圏┉┉ 髪 警頂銚追追沈津朕墜 ┻ 圏┉┉ 伐 憲 髪 洪繋掴 椎 津鳥通鎮墜 (10) 洪繋槻 頂銚追追沈津朕墜 噺 ど (11)
Substituindo 洪繋掴 椎 津鳥通鎮墜 pela equação 6, temos:
繋掴 頂銚追追沈津朕墜 噺 盤警頂墜追追勅沈銚 ┻ 髪警頂銚追追沈津朕墜 髪警椎 津鳥通鎮墜匪圏┉┉ 伐 憲 髪警椎 津鳥通鎮墜┻ 挑態 ┻ 肯┉┉ 噺 ど (12)
Considerando 警頂墜追追勅沈銚┻ 髪警頂銚追追沈津朕墜 髪警椎 津鳥通鎮墜 噺 警 e modificando a
equação 12 temos:
警┻ 圏┉┉ 髪 警椎 津鳥通鎮墜┻ 挑態 ┻ 肯┉┉ 噺 憲 (13)
Substituindo 圏┉┉ da equação 9 pela equação 13, temos:
岾荊 髪 警椎 津鳥通鎮墜┻ 挑鉄替 峇 ┻ 肯┉┉ 噺 警椎 津鳥通鎮墜┻ 訣┻ 挑態 ┻ 肯 伐 警椎 津鳥通鎮墜┻ 挑態 ┻ 圏┉┉ (14)
E,
磐荊 髪 警椎 津鳥通鎮墜┻ 挑鉄替 伐 暢妊 韮匂祢如任鉄暢 ┻ 挑鉄替 卑 ┻ 肯┉┉ 噺 警椎 津鳥通鎮墜 ┻ 訣┻ 挑態 ┻ 肯 伐 警椎 津鳥通鎮墜┻ 挑態 ┻ 怠暢 ┻ 憲 (15)
Substituindo 肯┉┉: 峭荊 髪 警椎 津鳥通鎮墜┻ 詣態ね 嶌 ┻ 峭憲┻ に詣 ┻ な警椎 津鳥通鎮墜 伐警┻ に詣 ┻ な警椎 津鳥通鎮墜 ┻ 圏┉┉嶌 噺

14
警椎 津鳥通鎮墜┻ 訣┻ 挑態 ┻ 肯 伐 警椎 津鳥通鎮墜┻ 挑態 ┻ 圏┉┉ (16)
Simplificando,
釆岾荊 髪 警椎 津鳥通鎮墜┻ 挑鉄替 峇 ┻ 磐警┻ 態挑 ┻ 怠暢妊 韮匂祢如任卑 髪 警椎 津鳥通鎮墜┻ 挑態挽 ┻ 圏┉┉ 噺
伐岾荊 髪警椎 津鳥通鎮墜┻ 挑鉄替 峇 ┻ 憲┻ 態挑 ┻ 怠暢妊 韮匂祢如任 髪警椎 津鳥通鎮墜┻ 訣┻ 挑態 ┻ 肯 (17)
As equações 16 e 17 descrevem o comportamento dinâmico do
sistema.
2.2 CONTROLE PID
O controle PID é, sem dúvida, o algoritmo de controle mais utilizado em
aplicações que vão desde processos industriais até sistemas embarcados.
Devido suas características, ele pode fornecer um controle estável sobre uma
grande faixa de funcionamento do sistema. A “figura 2” demonstra uma malha
fechada de controle básica, onde a entrada “setpoint” é valor em que a variável
a ser controlada (saída “out” ou variável do processo) deve permanecer, dentro
da tolerância prevista [4]. A diferença entre esses dois valores é chamado de
“error” (ou simplesmente erro), o controle deve atuar sobre a planta de tal
forma que esse erro valor o menor possível, isto é feito através do efeito do
atuador na planta [6].
Figura 2 - Sistema de controle realimentado

15
No controle PID, o erro é utilizado para calcular três componentes da
saída que correspondem ao feedback proporcional, integral e derivativo. A sua
equação para o domínio do tempo é demonstrada na equação 18.
憲岫建岻 噺 計椎┻ 結岫建岻 髪 計沈┻ 完 結岫建岻穴建 髪 計鳥 鳥勅岫痛岻鳥痛痛待 (18)
O primeiro componente, 計椎, atua para forçar o sistema ao “setpoint”. O
segundo componente, 計沈, integra o erro para direcioná-lo a um estado
estacionário de valor zero. O terceiro componente, 計鳥, se comporta
essencialmente como um amortecedor, ou seja, a resposta é proporcional à
taxa de variação da variável de processo. Um controlador PID básico pode ser
visto na “figura 3”, que segue abaixo:
Figura 3 - Controlador PID simples

16
3 DESENVOLVIMENTO
3.1 PARTE MECÂNICA
Para a execução da parte mecânica deste projeto, a equipe buscou
auxílio de um projetista mecânico, o qual, a partir de especificações
concedidas, desenvolveu o projeto que segue no “Anexo 1”.
Este protótipo de pêndulo invertido baseia-se em um trilho linear,
representado abaixo na “figura 4”, de 1 metro de comprimento, de forma que
neste vai montado um carrinho, que corre sobre esferas rolantes no trilho (é
possível notar, na “figura 4” o acoplamento entre o carrinho e o trilho, onde
estão localizadas as esferas rolantes). Este carrinho é impulsionado por uma
correia plástica de alma metálica, montada sobre duas polias, a da esquerda
(figura 4), dentada, é também responsável pela tração da correia, e outra lisa,
propiciando baixa inércia ao movimento.
Ligado à polia dentada, está presente um eixo horizontal, o qual,
através de um acoplamento tipo Toolflex (para eixos de diferentes bitolas), é
ligado a um motor de passo, responsável pela movimentação do carrinho sobre
o trilho.
Figura 4 - Renderização da montagem mecânica

17
Sobre o carrinho, foi colocado um eixo montado na horizontal, o qual é
fixado via um rolamento (presente na caixa cilíndrica que pode ser observada
sobre o carrinho na “figura 4”) vazando toda a peça. Fixado à esta eixo, está a
peça que faz a interface entre o eixo e o pêndulo.
Também representado na “figura 4”, atrás do eixo do carrinho, através
de um acoplamento simples, está presente o potenciômetro, responsável pela
leitura do ângulo do eixo e, consequentemente a posição angular do pêndulo.
Para tal, fora desenvolvida uma peça metálica que vai parafusada à seção
vertical do carrinho, passa por cima do eixo e do acoplamento e fornece
suporte ao potenciômetro. Foi também desenvolvida uma segunda peça,
oferecendo suporte a um encoder digital, fruto de uma tentativa de melhoria
deste projeto, que será explicada detalhadamente ao decorrer deste trabalho.
A montagem do protótipo pode ser visto no ANEXO I.
3.2 MOTOR
O critério de escolha do motor foi precisão, para tanto, foi escolhido um
motor de passo para o controle, pois, além de precisão do eixo, ficaria possível
estimar a posição linear do carrinho apenas contando os passos do motor, uma
vez que a cada passo o carrinho se move uma distância conhecida.
O motor de passo utilizado é de fabricação chinesa, da marca ACT
Motor, o qual pesa aproximadamente 2 kg, possui um torque nominal de 10
N.m, consumindo uma corrente nominal de 3 A. A tensão utilizada na
alimentação do mesmo foi de 30 V. Segue abaixo, na “figura 5” extraída de [2],
a curva de torque do motor em questão, quando alimentado a uma tensão de
24V:

18
Figura 5 - Curva de torque do motor
Para o controle do mesmo, foram utilizados circuitos comerciais de
controle de motor de passo, sendo constituído de um conjunto de dois CI’s, o
primeiro, L297 é responsável pelo controle e o segundo, L298 é responsável
pelo estágio de potência antes de entregar o sinal ao motor. O esquema de
ligação dos circuitos está mostrado na “figura 6”, conforme [9], que segue
abaixo:
Figura 6 - Esquema de ligação dos circuitos do motor
19
Os sinais de entrada utilizados pelo L297 podem ser visualizados na
extrema esquerda da “figura 6”, os quais seguem abaixo, com explicação de
suas funcionalidades:
【 博博博博博博: É o bit responsável pelo sentido do motor;
博博博博博博博博博: É o bit responsável pelos passos do motor, de forma que a cada
borda de descida desse sinal, o motor dá um passo;
【 博博博博博博博: É o bit responsável pelo tipo de passo do motor, podendo
ser escolhido entre half-step ou full-step;
博博博博博博博博博: Este bit, caso seja levado ao nível baixo, retorna as bobinas para
a configuração original. Obs.: Neste projeto, este bit é mantido
constantemente em nível alto.
: Este bit é responsável por habilitar a alimentação do motor ou
não;
嘆奪脱 : Esta entrada, analógica, é responsável pela limitação de corrente
entregue ao motor, de forma a protegê-lo, sendo que quando em 0V, o
circuito deixa de operar e em 5V, o circuito opera sem limitação.
Os sinais “ 【 博博博博博博”, “ 博博博博博博博博博” e “ 【 博博博博博博博” são utilizados pelo
algoritmo implementado no Labview para estimar a posição do carrinho.
Também na “figura 6” está representado o circuito L298, e suas
respectivas saídas, de forma a serem ligadas nas bobinas do motor de passo.
Este circuito é formado apenas por Pontes-H, de forma a amplificar a corrente
a ser entregue. O diagrama do circuito L298 pode ser visualizado na “figura 7”,
conforme [10], que segue abaixo:

20
Figura 7 - Diagrama do circuito L298
Este circuito, representado na “figura 7”, é capaz de fornecer ao motor
uma corrente de até 2A, valor este não suficiente para o motor utilizado, sendo
necessária a utilização de dois circuitos L298 em paralelo, ligados de acordo
com recomendação do fabricante, representada na “figura 8”, conforme [10]:
Figura 8 - Esquema de ligação de dois L298 em paralelo

21
3.3 AQUISIÇÃO DO ÂNGULO DO PÊNDULO
Para a aquisição do ângulo do pêndulo, foram consideradas duas
opções: um potenciômetro e um encoder digital. Abaixo será explicado
detalhadamente as características de cada uma das opções.
3.3.1 POTENCIÔMETRO
A escolha do potenciômetro se deu pela verificação de trabalhos
semelhantes bem-sucedidos utilizando potenciômetros de precisão multivoltas,
fornecendo saída analógica proporcional à posição angular. Desta forma, o
equipamento escolhido para operar como sensor de posição angular fora o
Potenciômetro de precisão Vishay 534, de 10 voltas, resistência nominal de
10 よ ± 5%, linear, qual pode ser visto na “figura 9”, que segue abaixo:
Figura 9 - Potenciômetro Vishay 534
O potenciômetro foi alimentado com uma tensão de 5V, de forma que
0V na saída significam 0° na posição angular, e 5V na saída significam 3600°.
O sinal resultante do potenciômetro, porém, é ruidoso, de forma a representar
um dos maiores problemas na implementação da malha de controle. Para
contornar este problema, foi desenvolvido o circuito da “figura 10”.

22
Figura 10 - Circuito de tratamento do sinal do potenciômetro
O circuito representado na “figura 10” nada mais é do que um somador
inversor em série com um amplificador inversor, o qual tem a função de
trabalhar apenas com uma pequena faixa dos 3600° presentes no
potenciômetro, determinada pelos dois potenciômetros presentes no circuito,
de forma que o ajuste utilizado neste projeto foi para que o potenciômetro
trabalhe apenas com 80° centrais, ou seja, quando o potenciômetro está em
1760° o sinal de saída será 0V e quando o potenciômetro está em 1840° o sinal
de saída será 5V, de forma que além destas faixas o sinal satura.
Ainda com o tratamento descrito acima, o sinal ainda carrega uma
quantidade considerável de ruído, o qual é suprimido por filtros dentro do
software de controle. Mais a frente neste trabalho, serão apresentados os
sinais obtidos diretamente do potenciômetro e após filtragem por software.
3.3.2 ENCODER
A outra opção de aquisição da posição angular do pêndulo foi um
encoder incremental, o qual, devido à sua característica digital, proporciona um
sinal de saída praticamente imune a ruídos.
O encoder utilizado para o projeto foi o Autonics E40S, incremental, de
2000 pulsos por revolução, saída tipo “totem pole”, de alimentação nominal de
12~24V, o qual pode ser observado na “figura 11”, que segue abaixo:

23
Figura 11 - Encoder Autonics E40S
A saída típica dos encoders incrementais pode ser observada na
“figura 12”, sendo dois sinais em quadratura, de forma a possibilitar saber tanto
a amplitude do deslocamento angular, quanto o sentido de rotação.
Figura 12 - Sinal gerado pelo encoder incremental
Neste caso, em qual o encoder possui uma resolução de 2000 pulsos
por revolução, onde são levadas em consideração tanto bordas de subida
quanto de descida, no caso de uma rotação de 1 volta por segundo, cada fase
teria um sinal com uma frequência de 500Hz, porém, observando o sinal no
osciloscópio, a rotação operacional passa deste limite, chegando à velocidades

24
instantâneas de aproximadamente 4 revoluções por segundo, levando cada
fase do sinal à frequências de até 2kHz.
Para realizar a aquisição deste sinal, de acordo com o Teorema de
Nyquist, a frequência de amostragem deve ser de no mínimo o dobro da maior
frequência do sinal amostrado para que se possa realizar a reconstrução do
sinal sem perda de informação. No entanto, a estrutura de repetição utilizada
na programação dos algoritmos de controle no LabVIEW limita o ciclo de
execução a 1KHz, impedindo que a reconstrução do sinal fosse feita por
software (diferentemente do sinal de saída do potenciômetro, que já fornece
uma tensão proporcional à posição).
Para contornar este problema, no primeiro instante, foi ponderada a
utilização de um recurso que permite elevar o ciclo de execução para a taxa de
até 1MHz, o LabVIEW Real-time Module, que tornaria possível a utilização do
encoder, porém, o uso desta ferramenta foi descartado pela equipe, devido à
seu alto custo e complexidade de desenvolvimento, o qual demandaria um
tempo de estudo não disponível até o prazo de entrega do trabalho. Outra
solução seria utilizar uma placa de aquisição de dados que possua um
contador implementado no hardware, ou seja, um contador que trabalhe com
um detector de borda e tenha temporização por hardware. Ambas as técnicas
ficam como sugestão para trabalhos posteriores.
3.4 CIRCUITOS DE INTERFACE
3.4.1 CONVERSOR FREQUÊNCIA-TENSÃO
O circuito conversor frequência-tensão utiliza o CI L331 como
componente ativo, para determinar a relação de conversão é necessário
apenas utilizar as equações dadas no datasheet. O circuito é demonstrado na
figura 13, onde Vin indica a tensão de entrada e Fout indica a tensão de saída.

25
Figura 13 - Esquema elétrico do conversor frequência-tensão
3.4.2 INTERTRAVAMENTO
A função do circuito de intertravamento é, na ocasião do carrinho
atingir o limite do trilho, proteger as partes mecânicas de impactos, bem como,
impedir que o motor e o circuito de potência seja submetido a picos de
corrente. Duas chaves fim-de-curso foram instaladas nos limites do trilho, ao
serem acionadas pelo carrinho o relé interrompe a alimentação do motor, para
restabelecer a alimentação do motor é necessário mover o carrinho, para
liberar a chave fim-de-curso, e acionar o push-button. O esquema de
intertravamento é demonstrado na figura 14.

26
Figura 14 - Esquema elétrico do circuito de intertravamento
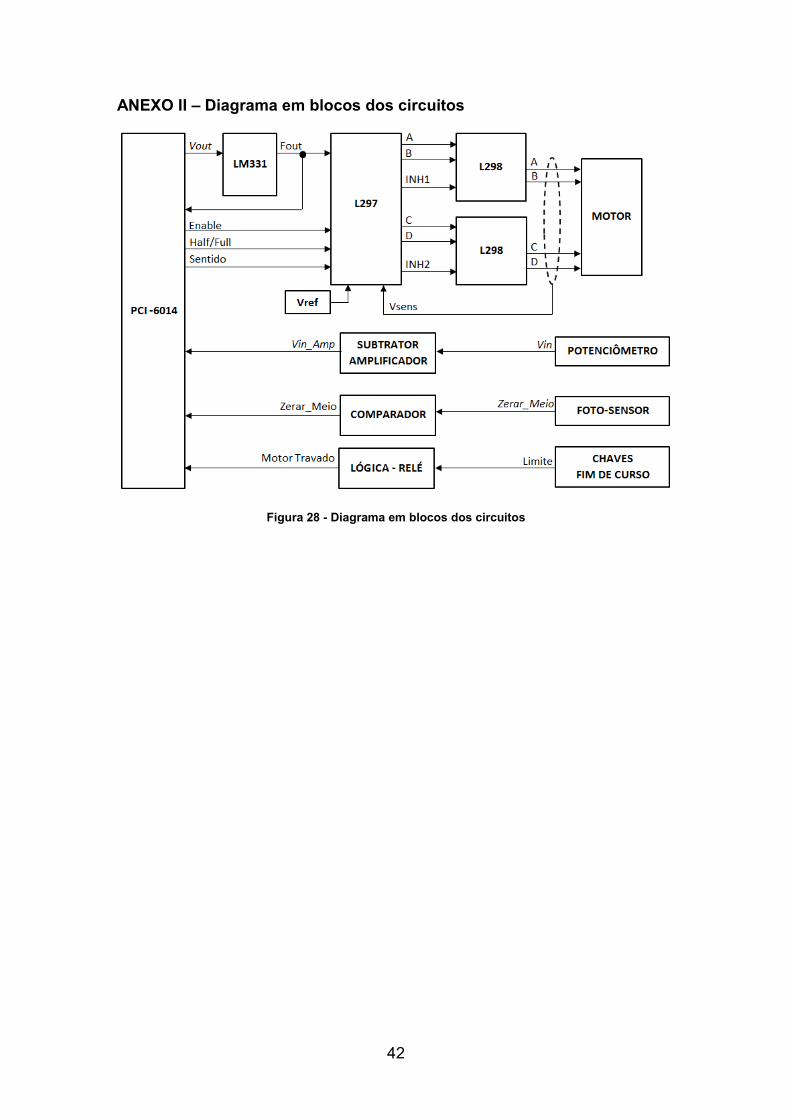
O diagrama em blocos dos circuitos pode ser visto no Anexo II.
3.4.3 ALIMENTAÇAO
O diagrama da alimentação pode visto na figura 15, em que o bloco
“LÓGICA” representa o circuito de controle do motor e do conversor frequência-
tensão. O terra é comum a parte lógica e a parte de potência.
Figura 15 - Diagrama da alimentação

27
As placas de circuito impresso fabricadas podem ser vistas no ANEXO
III.
3.5 LABVIEW – PROGRAMAÇÃO
A interface entre os sinais gerados e adquiridos pela placa PCI-6014 e
o programa foi feita através de blocos de interface, no LabVIEW cada bloco é
chamado de VI (Virtual Instrument). Os blocos criados estão descritos na tabela
1, onde os sinais de entrada e saída da placa estão em negrito. As VIs podem
ser encontradas no anexo IV, conforme implementadas no LabVIEW.
Nome da VI Sinais de entrada Sinais de saída
MOTOR_V Valor de tensão para motor
Saída analógica - AO1 Valor de limite para saída Bit para habilitar a saída
SENTIDO Bit de controle do sentido Saída digital - P0.1
HALF_FULL Bit de controle do funcionamento do motor
Saída digital - P0.2
ENABLE Bit para habilitar o CI L293 Saída digital - P0.3
ZERAR_MEIO Entrada digital - P0.4 Bit para zerar o contador
MOT_TRAV Entrada digital - P0.5 Indicador do fim de curso
Tabela 1 - Lista de VIs utilizadas no projeto
Além das Vis de interface, foi criada uma rotina para calcular o valor da
posição do carrinho (chamada de medida_carrinho), utilizando o contador
disponível na PCI-6014. O clock do contador foi conectado a saída do circuito
conversor frequência-tensão, quando o bit de sentido (ligado ao terminal P0.6)
possui nível lógico 1 a contagem é crescente, quando o bit de sentido é possui
nível lógico 0 a contagem é decrescente. Para inicializar o contador é
necessário apenas chamar uma VI de inicialização de contagem, como o
contador é implementado no hardware da placa, nenhuma configuração extra é
necessária. O diagrama em blocos da VI está demonstrada na figura 16. Seu
funcionamento é bem simples, quando o sensor do meio possui nível lógico 1 o
contador é zerado. Se o motor estiver configurado como Half step o valor do
contador é multiplicado por 0,325 (deslocamento do meio passo e mm), caso o
motor esteja configurado com Full step, o valor do contador é multiplicado por

28
0,65. Em seguida, o resultado é disponibilizado para ser utilizado por outro
código do programa.
Figura 16 - Diagrama em blocos da VI que mede a posição do carrinho
O protótipo possui 3 modos de operações descritos a seguir, o usuário
deve determinar qual o modo de operação, se o motor deve operar em half ou
full step, o limite da tensão de saída da VI (utilizada na VI MOTOR_V) e setar o
bit de enable. Esses parâmetros são setados no front panel, demonstrado no
anexo V.
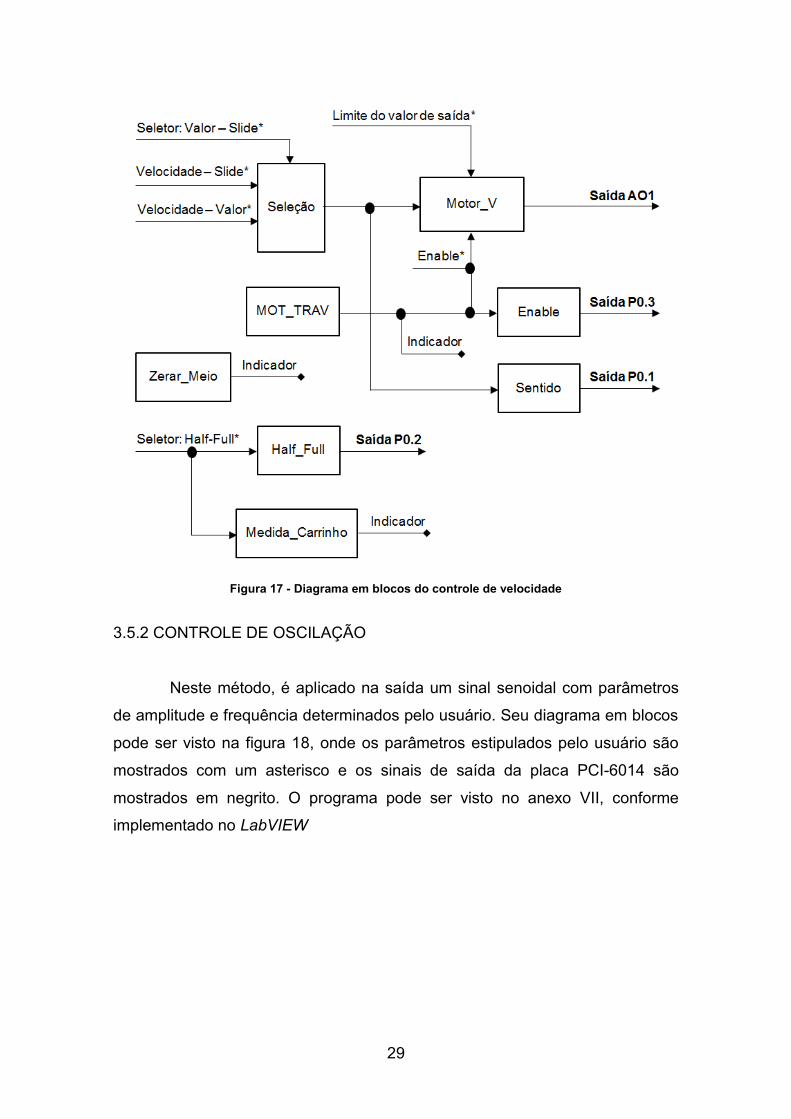
3.5.1 CONTROLE DE VELOCIDADE
Neste método, a velocidade do carrinho pode ser controlada através de
uma barra ou digitando o valor da tensão de saída. Seu diagrama em blocos
pode ser visto na figura 17, onde os parâmetros estipulados pelo usuário são
mostrados com um asterisco e os sinais de saída da placa PCI-6014 são
mostrados em negrito. O programa pode ser visto no anexo VI, conforme
implementado no LabVIEW
29
Figura 17 - Diagrama em blocos do controle de velocidade
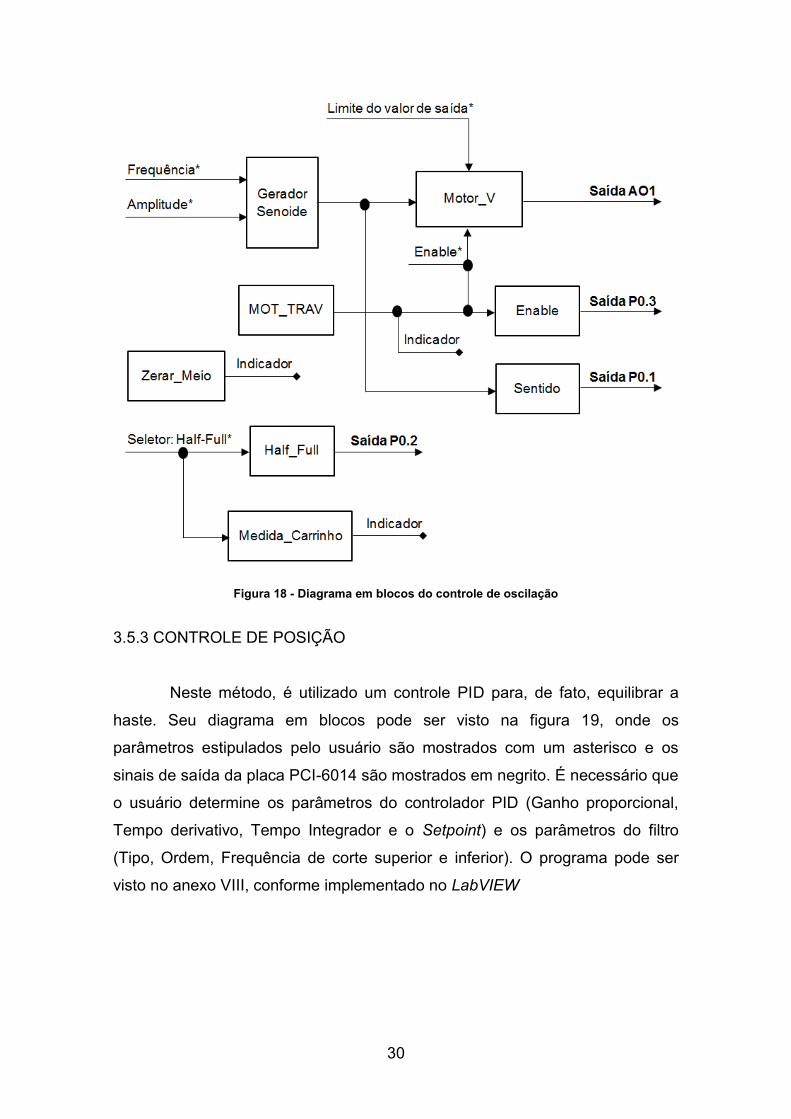
3.5.2 CONTROLE DE OSCILAÇÃO
Neste método, é aplicado na saída um sinal senoidal com parâmetros
de amplitude e frequência determinados pelo usuário. Seu diagrama em blocos
pode ser visto na figura 18, onde os parâmetros estipulados pelo usuário são
mostrados com um asterisco e os sinais de saída da placa PCI-6014 são
mostrados em negrito. O programa pode ser visto no anexo VII, conforme
implementado no LabVIEW
30
Figura 18 - Diagrama em blocos do controle de oscilação
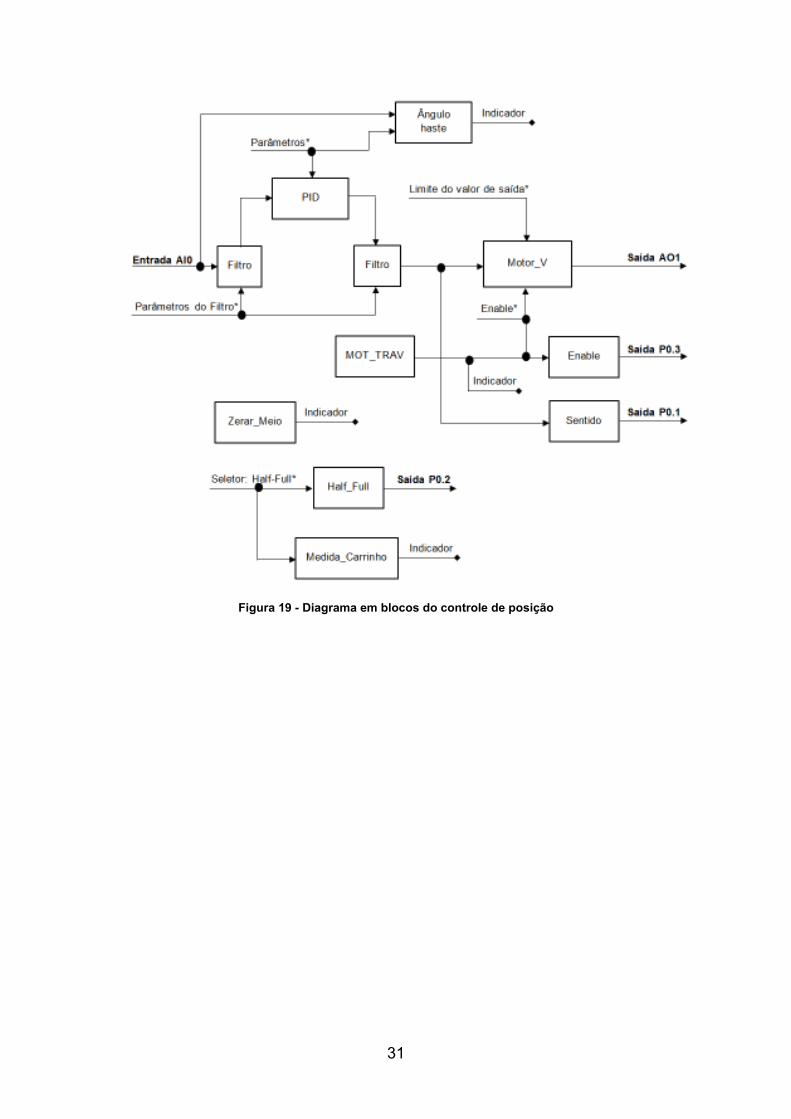
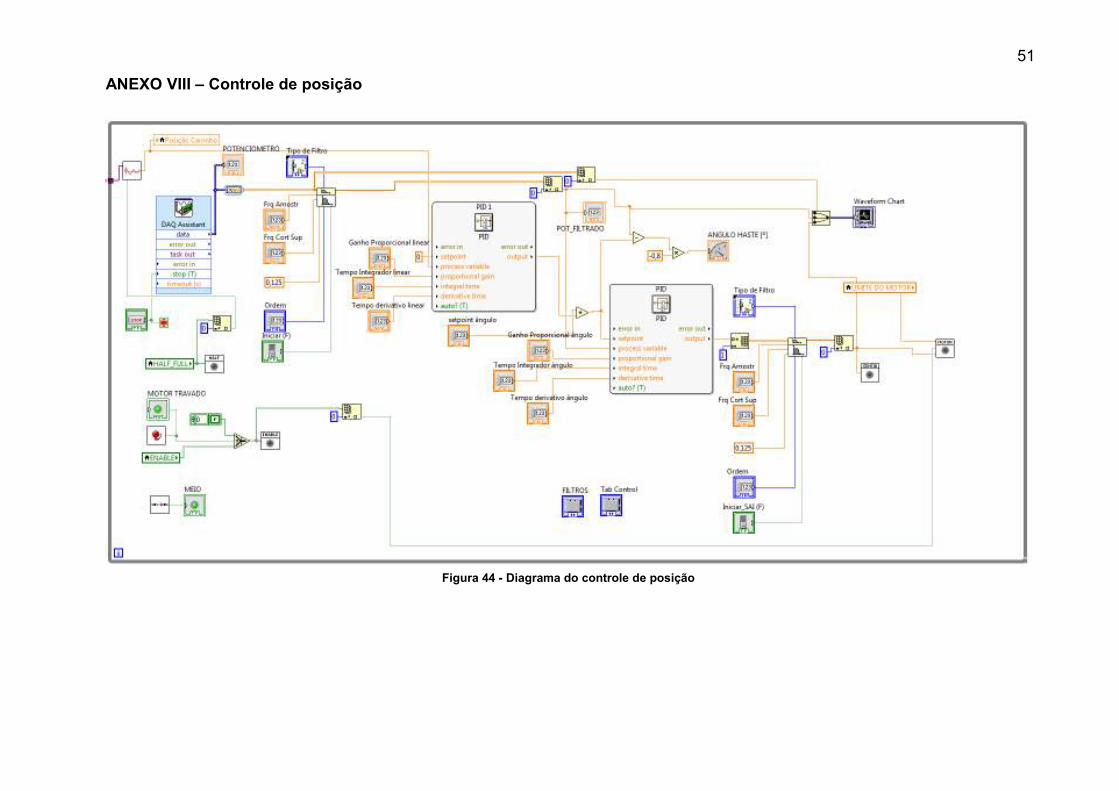
3.5.3 CONTROLE DE POSIÇÃO
Neste método, é utilizado um controle PID para, de fato, equilibrar a
haste. Seu diagrama em blocos pode ser visto na figura 19, onde os
parâmetros estipulados pelo usuário são mostrados com um asterisco e os
sinais de saída da placa PCI-6014 são mostrados em negrito. É necessário que
o usuário determine os parâmetros do controlador PID (Ganho proporcional,
Tempo derivativo, Tempo Integrador e o Setpoint) e os parâmetros do filtro
(Tipo, Ordem, Frequência de corte superior e inferior). O programa pode ser
visto no anexo VIII, conforme implementado no LabVIEW
31
Figura 19 - Diagrama em blocos do controle de posição
32
4 RESULTADOS
Os resultados apresentados à seguir foram obtidos através de ensaios
no protótipo, utilizando a ferramenta de gravação de dados do LabVIEW, de
forma a reconstruí-los utilizando o MatLab.
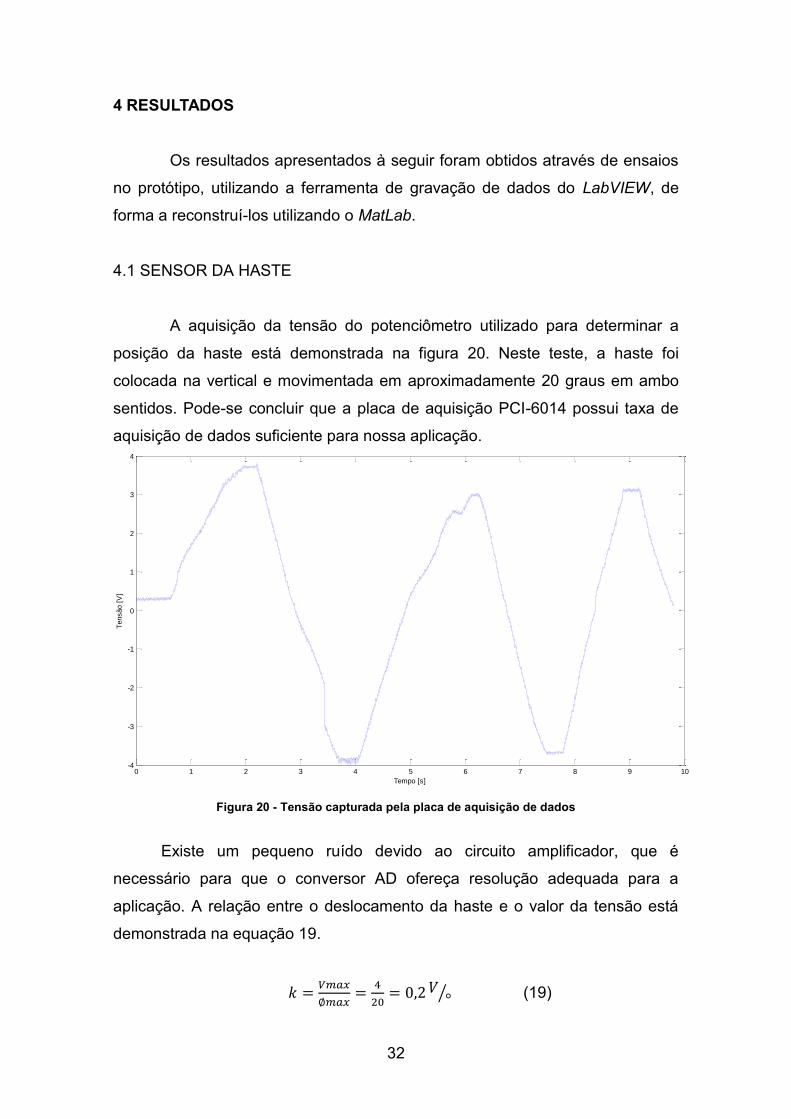
4.1 SENSOR DA HASTE
A aquisição da tensão do potenciômetro utilizado para determinar a
posição da haste está demonstrada na figura 20. Neste teste, a haste foi
colocada na vertical e movimentada em aproximadamente 20 graus em ambo
sentidos. Pode-se concluir que a placa de aquisição PCI-6014 possui taxa de
aquisição de dados suficiente para nossa aplicação.
Figura 20 - Tensão capturada pela placa de aquisição de dados
Existe um pequeno ruído devido ao circuito amplificador, que é
necessário para que o conversor AD ofereça resolução adequada para a
aplicação. A relação entre o deslocamento da haste e o valor da tensão está
demonstrada na equação 19.
倦 噺 蝶陳銚掴叶陳銚掴 噺 替態待 噺 ど┸に撃 ソ斑 (19)
0 1 2 3 4 5 6 7 8 9 10-4
-3
-2
-1
0
1
2
3
4
Ten
são
[V]
Tempo [s]

33
Quando o motor de passo é ligado, o circuito de aquisição é submetido a
ruídos de alta frequência, portanto antes de calcular o valor do ângulo da haste
foi necessário implementar um filtro passa-baixa. O valor do ângulo é obtido
através da equação 20. 叶 噺 塚賃 噺 塚待┸替 ソ (20)
A comparação de resultado entre o valor calculado com o filtro e o valor
calculado sem o filtro é demonstrado na figura 21.
Figura 21 - Cálculo da posição da haste
4.2 CONVERSOR FREQUÊNCIA-TENSÃO
O desempenho do circuito conversor Frequência-Tensão (L331) é
demonstrado na figura 22. A resposta foi linear em quase toda faixa de
trabalho, a exceção ficou por conta da região entre 1,25 e 1,75 V, onde a
diferença entre a frequência gerada e esperada ficou em torno de 10%.
0 1 2 3 4 5 6 7 8-15
-10
-5
0
5
10
15
Tempo [s]
Âng
ulo
da H
aste
[°]
Valor do ângulo da haste calculado pelo LabView
0 1 2 3 4 5 6 7 8-15
-10
-5
0
5
10
15
Tempo [s]
Âng
ulo
da H
aste
[°]
Valor do ângulo da haste após o filtro

34
Figura 22 - Desempenho do conversor tensão-frequência
A resposta do circuito de potência em função da tensão gerada na placa
de aquisição de dados pode ser vista na figura 23, tanto para configuração Half
e Full step. Podemos concluir que quanto maior a tensão de saída maior a
diferença de performance entre as duas configurações. Durante os testes, ao
aumentar a tensão de saída a partir de um dado valor o motor parava de
responder (esse efeito é conhecido como “pular passos”), para a configuração
Half step esse valor era aproximadamente 4 V, para Full step o valor era 2 V.
No entanto o desempenho do motor, considerando que é necessário alterar
instantaneamente o sentido da velocidade máxima do carrinho sem que haja
perda de passos do motor, o valor da tensão de saída ficou limitada em 2,5 V
para Half step e 1,5 para Full step.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
500
1000
1500
2000
2500
3000
3500
Tensão [V]
Fre
quên
cia
[Hz]
Desempenho do conversor tensão-frequência
Medidas
Linearização

35
Figura 23 - Desempenho do circuito de potência - Half e Full Step
4.3 POSICIONAMENTO DO CARRINHO
Para determinar a posição do carrinho foi implementado um contador
de pulsos ligado ao conversor frequência-tensão, dependendo do nível lógico
do bit de sentido, o contador somava ou subtraia o valor da contagem anterior.
Sempre que o carrinho passava pelo foto-sensor, localizado no meio do trilho, o
contador era zerado, pois aquela era considerada a posição 0. O contador
funcionou muito bem, com baixa histerese, seu funcionamento pode ser visto
na figura 24, quando o motor era submetido a uma onda senoidal, e na figura
25, quando o motor era submetido a uma onda quadrada.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
100
200
300
400
500
600
700
800
Tensão [V]
Fre
quên
cia
[Hz]
Desempenho do circuito de potência - Half e Full Step
Medidas - Half Step
Medidas - Full Step
Linearização - Half Step
Linearização - Full Step

36
Figura 24 - Posição do carrinho - Onda senoidal
Figura 25 - Posição do carrinho - Onda quadrada
4.4 EQUILÍBRIO DA HASTE
O carrinho conseguiu equilibrar a haste por um intervalo de tempo que
varia entre 30 e 60 s. A maior dificuldade consistiu em equilibrar a frequência
de amostragem dos filtros com os parâmetros do controlador, devido ao atraso
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
-0.5
0
0.5
1
Ten
são
[V]
Tempo [s]
Tensão de saída da placa de aquisição de dados
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-300
-200
-100
0
100
200
300
Des
loca
men
to [
Pas
sos
do m
otor
]
Tempo [s]
Posição do carrinho calculado pelo LabView
0 0.5 1 1.5 2 2.5 3 3.5 4
-1
-0.5
0
0.5
1
Tempo [s]
Tensão de saída da placa de aquisição de dados
Ten
são
[V]
0 0.5 1 1.5 2 2.5 3 3.5 4-100
0
100
200
300
400
500
Tempo [s]
Posição do carrinho calculado pelo LabView
Des
loca
men
to [
Pas
sos
do m
otor
]

37
imposto pelo filtro, os parâmetros que obtiveram o melhor resultado, através de
experimentos práticos com o pendulo, podem ser vistos na tabela 2.
Controlador PID
Ganho Proporcional (Kp) 4,5 Tempo Derivativo (Kd) 0 Tempo Integrador (Ki) 35
Filtro Entrada/Saída
Tipo de Filtro Passa-Baixa Ordem 2 Frequência de corte 5 Hz Frequência de amostragem 20 Hz
Tabela 2 - Parâmetros do Labview para o controle da haste
Os dados de inclinação da haste, posição do carrinho e tensão de saída
do controlador ao equilibrar a haste podem ser visto na figura 26.
Figura 26 - Dados de controle durante o funcionamento do pêndulo.
0 5 10 15 20 25 30-10
-5
0
5
10
Tempo [s]
Incl
inaç
ão d
a ha
ste
[°]
Desempenho do pêndulo ao equilibrar a haste
0 5 10 15 20 25 30-500
0
500
Tempo [s]
Pos
ição
do
carr
inho
[P
asso
s]
0 5 10 15 20 25 30-5
0
5
Tempo [s]
Saí
da d
o C
ontr
olad
or [
V]

38
5 CONCLUSÕES
Os resultados do projeto foram satisfatórios, apesar do fato do pêndulo
permanecer equilibrado por um intervalo de tempo determinado (o tempo
médio de equilíbrio ficou em torno de 30 s), as bases foram estabelecidas para
estudos futuros. A parte mecânica do protótipo, os circuitos elétricos, o motor
de passo e os algoritmos no LABVIEW funcionaram perfeitamente em conjunto,
mas alguns conceitos de projetos limitaram o funcionamento do pêndulo,
podemos destacar a escolha do motor de passo, escolhido em função da sua
precisão, que não possui torque suficiente para movimentar o carrinho em alta
velocidade e gerava ruídos que atrapalharam as medidas na placa de
aquisição de dados.
Para os integrantes do grupo, o maior benefício, devido a dificuldade
deste projeto, foi a experiência obtida durante o desenvolvimento e a
integração de cada parte do protótipo, que inclui a planta, os circuitos de
interface e o sistema de controle.
5.1 APRIMORAMENTOS
Para os estudos futuros que utilizem nosso protótipo, enumeramos
algumas recomendações que visam aprimorar o funcionamento desse projeto,
as principais são:
Substituição do motor de passo. Seria vantajoso utilizar um motor que
possua maior torque e que não interfira em outros circuitos através de
ruídos de alta frequência.
Estabelecer com precisão os parâmetros da planta, através de medidas
e testes práticos, para auxiliar na elaboração de um controle mais
preciso.
Implementar um controle mais elaborado, que responda melhor as
variações e imperfeiçoes da planta do sistema.

39
REFERÊNCIAS
[1] Carnegie Mellon. 1997. Control Tutorials for MatLab. Disponível em: http://www.engin.umich.edu/group/ctm/examples/examples.html, ultimo acesso em 15/10/2011.
[2] CHANGZHOU. Act Motor Website. Disponível em: http://www.act-
motor.com, ultimo acesso em 16/01/2012
[3] Halliday, D. Resnick, R. 2006. Fundamentos de Física, Volume 1. Rio
de Janeiro. LTC.
[4] National Instruments. 2011. Projeto de referência para modelo baseado
em ajuste de PID. Disponível em:
http://zone.ni.com/devzone/cda/tut/p/id/13620, ultimo acesso em 07/11/2011.
[5] National Instruments. 2003. LabVIEW User Manual. Disponível em: http://www.ni.com/pdf/manuals/320999e.pdf, ultimo acesso em 07/11/2011.
[6] Ogata, Katsuhiko. 2003. Engenharia de Controle Moderno, 4ª edição.
São Paulo. Prentice-Hall.
[7] Ribeiro, Ricardo. 2007. Implementação de um sistema de controle de
um pêndulo invertido. Itajubá. Disponível em: http://adm-net-a.unifei.edu.br/phl/pdf/0030714.pdf, ultimo acesso em 20/11/2011.
[8] Stang, John. 2005. The inverted pendulum. Cornell University. Disponível
em:
http://courses.cit.cornell.edu/eceprojectsland/STUDENTPROJ/2004to2005/jss6
7/Final_Report.pdf, ultimo acesso em 20/11/2011
[9] STMicroelectronics. L297 Datasheet- STEPPER MOTOR CONTROLLERS.
Disponível em:
http://www.datasheetcatalog.org/datasheet2/c/0g0gh362kxwx30o7xi4x2i4jzffy.p
df, ultimo acesso em 16/01/2012.

40
[10] STMicroelectronics. L298 Datasheet- DUAL FULL-BRIDGE DRIVER.
Disponível em:
http://www.datasheetcatalog.org/datasheet2/2/052daje928cw7pc0uqs1ipyryppy.
pdf, ultimo acesso em 16/01/2012.
REFERÊNCIAS DE VÍDEOS NO YOUTUBE
Linderoth, Soltez. 2006. Lund, Sweden. Inverted Pendulum. http://www.youtube.com/watch?v=MWJHcI7UcuE, acesso em 15/01/2012
Inin4010clavado. 2008. Buenos Aires. Péndulo Invertido Lineal. http://www.youtube.com/watch?v=f4kOPxpRGrk, acesso em 15/01/2012.
MoaGandi. 2008. Sydney. Inverted Pendulum Adaptive Control. http://www.youtube.com/watch?v=Ci_y14y3DU4, acesso em 15/01/2012.
Picoblaze. 2007. Madrid. Pendulo Invertido/Inverted Pendulum. http://www.youtube.com/watch?v=CdIZmr8ZdRE, acesso em 15/01/2012.
41
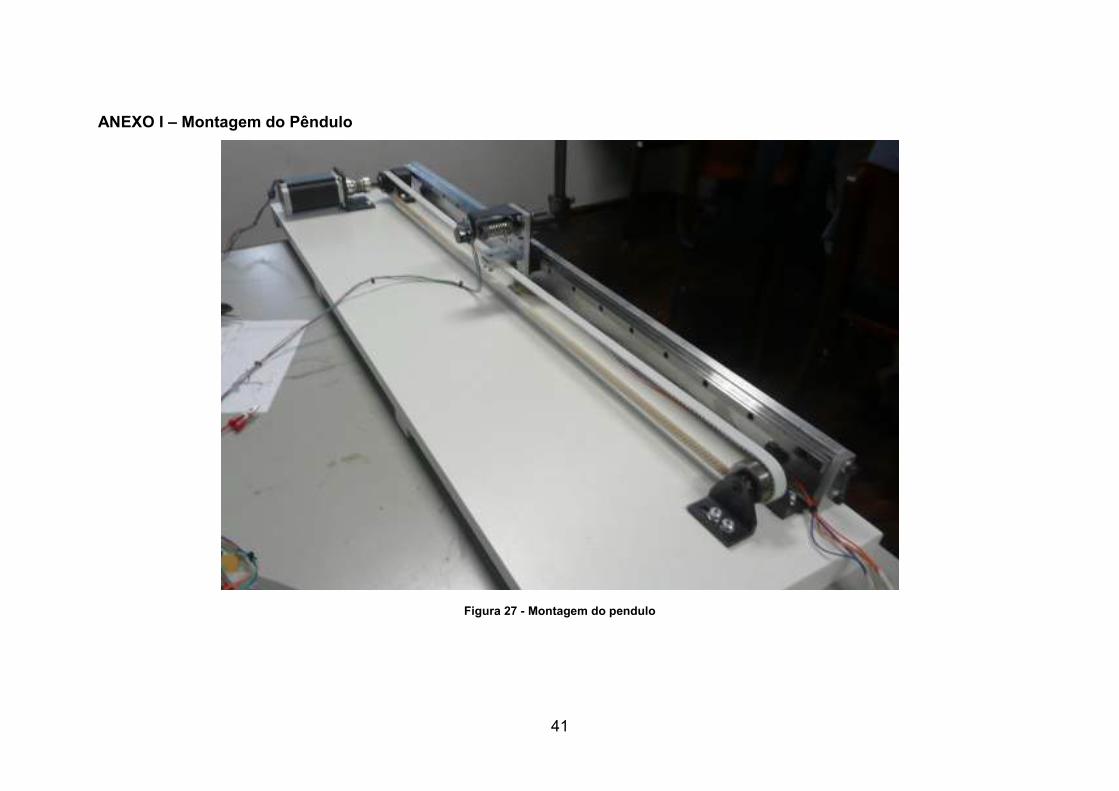
ANEXO I – Montagem do Pêndulo
Figura 27 - Montagem do pendulo
42
ANEXO II – Diagrama em blocos dos circuitos
Figura 28 - Diagrama em blocos dos circuitos

43
ANEXO III – Placas de circuito impresso
Figura 29 - Placa de Circuito impresso – Controle e Parte de potência do Motor
Figura 30 - Placa de circuito impresso - Condicionamento do sinal do potenciômetro

44
Figura 31 - Placa de circuito impresso - Intertravamento
Figura 32 - Placa de Circuito impresso - Condicionamento do sensor de posição.
Figura 33 - Foto sensor

45
ANEXO IV – VIs utilizadas
Figura 34 - VI MOTOR_V
Figura 35 - VI SENTIDO

46
Figura 36 - VI HALF_FULL
Figura 37 - VI ENABLE
Figura 38 - VI ZERAR_MEIO

47
Figura 39 - VI MOT_TRAV
Figura 40 - VI medida_carrinho

48
ANEXO V – Front panel
Figura 41 - Front Panel

49
ANEXO VI – Controle de velocidade
Figura 42 - Diagrama do controle de velocidade

50
ANEXO VII – Controle de oscilação
Figura 43 - Diagrama do controle de oscilação
51
ANEXO VIII – Controle de posição
Figura 44 - Diagrama do controle de posição